Metody eksploracji danych 6. Klasyfikacja (kontynuacja)
|
|
|
- Halina Chmiel
- 6 lat temu
- Przeglądów:
Transkrypt
1 Metody eksploracji danych 6. Klasyfikacja (kontynuacja) Piotr Szwed Katedra Inforatyki Stosowanej AGH 2016 Support Vector Machines k-nearest Neighbors
2 Support Vector Machines Maszyny Wektorów Wspierających P. Szwed: Metody eksploracji danych (2016) 2

3 Liniowa separowalność danych Rozważy zagadnienie binarnej klasyfikacji, w który zbiore etykiet jest { 1,1} Zbiór danych D = { x i, y i : i = 1,, }, gdzie x i R n jest linowo separowalny, jeżeli istnieje hiperpłaszczyzna w T x + b = 0, taka że: i: y i = +1. w T x i + b > 0 i: y i = 1. w T x i + b < 0 Powyższe dwa warunki ożna zapisać jako jeden: i: y i = sign(w T x i + b) W ty przypadku: w R n, b to eleent dotychczas oznaczny jako w 0. P. Szwed: Metody eksploracji danych (2016) 3
, np. wieloianów. W przestrzeni cech odel dalej jest liniowy i równanie hiperpłaszczyzny a postać: w T h x + b = 0 P.")
4 Liniowa separowalność danych W przypadku danych, które nie są bezpośrednio separowalne przez hiperpłaszczynę, ożliwe jest wprowadzenie nieliniowych cech h(x), np. wieloianów. W przestrzeni cech odel dalej jest liniowy i równanie hiperpłaszczyzny a postać: w T h x + b = 0 P. Szwed: Metody eksploracji danych (2016) 4
 Nieliniowe odele ogą zapewnić kształty regionów")

5 Liniowa separowalność danych Nieliniowe odele: Drzewa decyzyjne Sieci neuronowe Najbliżsi sąsiedzi (knn) Nieliniowe odele ogą zapewnić kształty regionów decyzyjnych zgodne z etykietai klas trudniejsze do uczenia ryzyko nadiernego dopasowania Regresja logistyczna Drzewo decyzyjne P. Szwed: Metody eksploracji danych (2016) 5
6 Koncepcja SVM Zakładając, że dane są separowalne, zazwyczaj istnieje (nieskończenie) wiele hiperpłaszczyzn π(w, b) rozdzielających dane. Kryteriu wyboru: π(w 1, b 1 ) jest lepszą granicą klas niż π(w 2, b 2 ) jeżeli obserwacje są od niej bardziej odległe. (Mniejsza podatność na szu i nadierne dopasowanie) π(w 1, b 1 ) π(w 2, b 2 ) P. Szwed: Metody eksploracji danych (2016) 6
7 Margines Hiperpłaszczyznę separującą klasy ożna rozsuwać w obie strony (linie przerywane), aż do oentu, w który pojawią się na nich obserwacje. Margines to odległość poiędzy hiperpłaszczyznai oznaczonyi liniai przerywanyi Wielkość arginesu zależy od ułożenia hiperpłaszczyzny P. Szwed: Metody eksploracji danych (2016) 7
8 Model ateatyczny Załóży, że zbiór uczący D = { x i, y i : i = 1,, } jest linowo separowalny przez hiperpłaszczyznę o arginesie ρ. Wówczas: 1. w T x i + b ρ 2 jeżeli y i = 1 2. w T x i + b + ρ 2 jeżeli y i = +1 Oba warunki ożna zapisać jako: y i (w T x i + b) ρ 2 Przeskalujy w i b dzieląc obie strony przez ρ. Równanie (po 2 przeskalowaniu) a postać: y i (w T x i + b) 1 P. Szwed: Metody eksploracji danych (2016) 8
9 Wektory wspierające Wektory wspierające (nośne, ang. support vectors) to obserwacje, dla których nierówność y i (w T x i + b) 1 jest równością, czyli zachodzi: x s : y s w T x s + b = 1 Obliczy odległość wektora wspierającego od hiperpłaszczyny: 1 w r = wt x s + b w = y s(w T x s + b) w = 1 w 1 w 1 w Czyli argines dla przeskalowanych w i b oże być wyrażony jako: ρ = 2r = 2 w P. Szwed: Metody eksploracji danych (2016) 9
10 Optyalna hiperpłaszczyzna Zagadnienie optyalizacji Znajdź w i b takie, że: ρ = 2r = 2 w przeforułowane jako: jest aksyalizowane (funkcja celu) przy ograniczeniach: i = 1, : y i (w T x i + b) 1 Zagadnienie optyalizacji kwadratowej Znajdź w i b takie, że: Φ w = 1 2 wt w jest inializowane (funkcja celu) przy ograniczeniach: i = 1, : y i (w T x i + b) 1 Kwadratowa funkcja celu: zienne to w i b Z liniowyi ograniczeniai (y i i x i odgrywają rolę współczynników) P. Szwed: Metody eksploracji danych (2016) 10
11 Proble optyalizacji Proble optyalizacji z ograniczeniai rozwiązuje się przez zastosowanie tzw. nożników Lagrange a [Także ]. W punkcie optyalny spełniający ograniczenia wektory gradientów funkcji i aktywnych ograniczeń uszą być równoległe i przeciwnie skierowane g 1 (x 1,x 2 ) 0 g 2 (x 1,x 2 ) 0 f(x 1,x 2 ) (x 1 *x 2 *) L x 1, x 1, α = f x 1, x 2 α i g i (x 1, x 2 ) α i - nożniki Lagrange a Ograniczenie g 1 nie jest aktywne w punkcie optyalny. Stąd: g 1 x 1, x 2 < 0 oraz α 1 = 0 Ograniczenie g 2 jest aktywne w punkcie optyalny, czyli spełnione będzie g 2 (x 1, x 2 ) = 0 oraz α 2 0 i P. Szwed: Metody eksploracji danych (2016) 11
12 Mnożniki Lagrange a Funkcja Lagrange a dla zgadnienia SVM: L w, b, α = 1 2 w 2 α i (y i w T x i + b 1) 1 w 2 to oryginalna funkcja celu 2 i=1 α i y i ( w T x i + b 1) to ograniczenia wynikające z obserwacji w zbiorze uczący. Zauważy, że α i = 0, dla obserwacji nie będących wektorai wspierającyi oraz α i 0 dla wektorów wspierających. Rozwiązanie polega na: obliczeniu pochodnych L w, b, α względe ziennych w i b przyrównaniu pochodnych do 0 (warunek konieczny) wstawieniu otrzyanych zależności na w i b do L w, b, α rozwiązaniu probleu dualnego aksyalizacji L w, b, α w przestrzeni współczynników α. w, b, α jest punkte siodłowy, będący iejsce iniu L w, b, α względe w i b oraz aksiu L w, b, α względe α. P. Szwed: Metody eksploracji danych (2016) 12
13 Mnożniki Lagrange a 1. Obliczay pochodne i przyrównujey do 0: i=1 L w, b, α = 1 2 w 2 α i (y i w T x i + b 1) L w,b,α = w w j i=1 α i y i x ij j L w,b,α L w,b,α, stąd = 0 w w j = i=1 α i y i x ij w = i=1 α i y i x i j b = 0 i=1 α i y i = 0 2. Podstawiay do wzoru L w, b, α : L α = 1 α 2 i=1 i y i x 2 i i=1 α i y i ( j=1 α j y j x j ) T x i i=1 α i y i b + i=1 α i 1 L α = 1 2 i=1 α i y i x i L α = i=1 α i ( j=1 α j y j x j ) T i=1 α i y i x i + i=1 α i 1 i=1 α i y i x i 2 P. Szwed: Metody eksploracji danych (2016) 13
14 Zagadnienie dualne Zagadnienie dualne aksyalizacji ax α i=1 przy ograniczeniach: α i 0 oraz α i 1 2 i=1 α i y i x i i=1 α i y i = 0 2 Postać alternatywna ax α Składnik i=1 α i odpowiada aksyalizacji arginesu, który jest ograniczany przez odległości poiędzy wektorai wspierającyi (drugi składnik). Pierwsza postać wydaje się bardziej efektywna (ale druga jest preferowana): suuje się wektorów i oblicza ich iloczyn skalarny. w drugiej wersji oblicza się 2 iloczynów skalarnych i=1 α i 1 2 przy ograniczeniach: α i 0 oraz i=1 i=1 α i i=1 α i y i = 0 α j y i y j (x i T x j ) P. Szwed: Metody eksploracji danych (2016) 14
15 Model SVM Hiperpłaszczyzna wx + b = 0 wyznacza granicę klas. Stąd funkcja decyzyjna a postać: f x = sign wx + b. i=1 Podstawiając w = α i y i x i, otrzyujey: f x = sign i=1 α i y i x T x i + b Oznaczy przez S zbiór indeksów wektorów wspierających S = {i: α i 0}. Postać funkcji decyzyjnej ożna uprościć Składnik b = 1 S f x = sign α i y i x T x i + b i S (y i i S j=1 α j y j (x T i x j )) Model klasyfikatora SVM jest reprezentowany przez: zbiór wektorów wspierających: {x j : j S} zbiór współczynników probleu dualnego α j : j S współczynnik b (intercept) Nie jest konieczne jawne wyznaczanie wektora w P. Szwed: Metody eksploracji danych (2016) 15

. P.")
16 Przykład Niezależnie od liczby obserwacji, w obu przypadkach odel składa się z 3 wektorów wspierających wykorzystywanych przez funkcję decyzyjną. Ogólnie: liczba wektorów wspierających S n + 1, czyli zależy od wyiarów probleu (dla liniowo separowalnych obserwacji). P. Szwed: Metody eksploracji danych (2016) 16
17 Obserwacje na ogół nie są liniowo separowalne Dwie ożliwości: Transforacja zagadnienia, w który obserwacje x i R n do postaci w przestrzeni cech h x i R N, gdzie N będzie wystarczająco duże, aby zapewnić separowalność h x i. Na przykład transforacja oże polegać na wyznaczeniu czynników wieloianowych wybranego stopnia Wprowadzenie iękkiego arginesu: dopuszczenie obserwacji naruszających separowalność i uwzględnienie ich w funkcji celu jako kary za przekroczenie ograniczeń. W praktyce stosuje się kobinację obu rozwiązań P. Szwed: Metody eksploracji danych (2016) 17
 = x h 2 (x) = x 2 Transforacja pozwala na odseparowanie obserwacji w R 2 P.")
18 Transforacja do przestrzeni cech - przykład Nieseparowalne dane w R Separowalne obserwacje w przestrzeni R 2 Niech h x R 2, gdzie h 1 x) = x h 2 (x) = x 2 Transforacja pozwala na odseparowanie obserwacji w R 2 P. Szwed: Metody eksploracji danych (2016) 18
19 Funkcja jądra (kernel) Po transforacji do przestrzeni cech funkcja decyzyjna a postać: f x = sign α i y i h x T h(x i ) + b i S Oznaczy K(x i, x j ) = h x T h(x i ). Po podstawieniu: f x = sign α i y i K(x, x i ) + b i S Czynnik K(x i, x j ) to tzw. jądro (kernel), czyli funkcja odpowiedzialna za obliczanie iloczynu skalarnego w przestrzeni cech. Przykład: Dwuwyiarowy wektor x = x 1 x 2 Kernel K(x, z) = 1 + x T z 2 K x, z = 1 + 2x 1 z 1 + 2x 2 z 2 + 2x 1 z 1 x 2 x 2 + x 1 2 z x 2 2 z 2 2 = 1 2x 1 2x 2 2x 1 x 2 x 1 2 x 2 2 T 1 2z 1 2z 2 2z 1 z 2 z 1 2 z 2 2 Czyli h(x) = 1 2x 1 2x 2 2x 1 x 2 x 1 2 x 2 2 Kernel w niejawny sposób odwzorowuje przestrzeń X do przestrzeni cech h(x) bez konieczności ich wyznaczania. Jest to tzw. kernel trick P. Szwed: Metody eksploracji danych (2016) 19
20 Kernel Liniowy Stosowane funkcje jądra K(x i, x j ) = x i T x j Odwzorowuje h(x) = x Wieloian stopnia p K(x i, x j ) = 1 + x i T x j p Funkcja Gaussa (RBF, radial basis function) Sigoidalny n + p 1 Wyiar h(x) to. p Jest to liczba rzędu n p. Np. dla n = 100 i p = 6 N = K(x i, x j ) = e x i x j 2σ 2 Wektor cech jest nieskończeniewyiarowy. Granicą klas jest kobinacja funkcji obliczana dla wektorów wspierających K(x i, x j ) = tanh γ x i T x j + r Uczenie SVM wyaga obliczenia K(x i, x j ) dla wszystkich par obserwacji. Aby funkcja ogła być użyta jako kernel wyagane jest, aby acierz [K(x_i,x_j)] była nieujenie określona dla dowolnych wektorów (x_i,i=1,,). Dalsze inforacje: acierz Graa i twierdzenie Mercera. P. Szwed: Metody eksploracji danych (2016) 20
 Najlepsze rezultaty dla kernela gaussowskiego (RBF)")


21 Przykłady Granice klas i arginesy dla różnych funkcji jądra (kerneli) Najlepsze rezultaty dla kernela gaussowskiego (RBF) ale równocześnie duża liczba wektorów wspierających W przypadku kernela wieloianowego, stopień wynosił 3 W rzeczywistości uczenie odelu z użycie iękkich arginesów (patrz dalej). Widoczne dla kernela sigoidalnego. P. Szwed: Metody eksploracji danych (2016) 21
22 Miękkie arginesy Jeżeli w zbiorze uczący występują obserwacje (x i, y i ), oraz x j, y j takie, że x i = x j i y i y j, dane nigdy nie będą liniowo separowalne, nawet po transforacji do przestrzeni cech o dowolnej złożoności. Miękkie arginesy są rozwiązanie, które pozwala w taki przypadku zbudować klasyfikator SVM (ale a ono charakter bardziej ogólny) W odelu dopuszcza się obserwacje leżące po niewłaściwej stronie hiperpłaszczyzn wyznaczających arginesy. W funkcji celu wprowadza się współczynniki kary ξ i za przekroczenie ograniczeń. P. Szwed: Metody eksploracji danych (2016) 22
23 Zagadnienie optyalizacji Znajdź w, b, takie, że: Miękkie arginesy Φ w, b, = 1 2 wt w + C i=1 i jest inializowane przy ograniczeniach: i = 1, : y i w T x i + b i = 1, : i 0 1 i Paraetr C pozwala na kontrolowanie koproisu poiędzy cele aksyalizacji arginesu oraz dopasowanie do danych uczących Jeżeli stała C jest ała wybierany jest szeroki argines koszte dopasowania do danych uczących Jeżeli stała C jest duża, argines staje się ały i następuje dobre dopasowanie do danych uczących P. Szwed: Metody eksploracji danych (2016) 23
24 Funkcja celu: Hinge loss Φ = 1 2 wt w + C l(w T x + b, y i ) i=1 Złożoność odelu Błąd uczenia Dla odelu z iękkii arginesai drugi składnik a postać funkcji składanej z dwóch półprostych (z zawiase ). Nachylenie półprostej zależy od stałej C l(w T x i +b, y i ) 1 y i (w T x i +b) P. Szwed: Metody eksploracji danych (2016) 24

25 Przykłady P. Szwed: Metody eksploracji danych (2016) 25
26 Optyalizacja Wprowadzenie stałej C w funkcji celu w niewielki stopniu zienia dualną postać probleu (dodatkowe ograniczenie) ax α J α = i=1 α i 1 2 przy ograniczeniach: 0 α i C oraz Optyalizacja i=1 i=1 α i α j y i y j (x T i x j ) i=1 α i y i = 0 Ze względu na ograniczenie i=1 α i y i = 0 nie jest ożliwa optyalizacja wzdłuż współrzędnych, jeśli 1 współczynników jest ustalonych, nie ożna optyalizować -tego [Patrz dla porównania etoda Gaussa Seidla/coordinate descent] Muszą być optyalizowane co najniej dwa współczynniki na raz Najbardziej popularny algoryte jest SMO (Sequential inial optiization) while (nie stop): 1. Wybierz parę α i i α j naruszającą ograniczenia (etoda wyboru heurystyczna). 2. Popraw wartość J α, dla ziennych α i i α j, zachowując pozostałe współczynniki stałe. W taki przypadku J α jest zwykłą funkcją kwadratową jednego ze współczynników α i lub α j Patrz np: _sekwencyjnej_inialnej_optyalizacji P. Szwed: Metody eksploracji danych (2016) 26
27 knn Algoryt najbliższych sąsiadów P. Szwed: Metody eksploracji danych (2016) 27
28 Algoryt najbliższych sąsiadów Algoryt najbliższych sąsiadów opiera się na prosty poyśle przewidywane wartości wyjściowe ogą być ustalane na podstawie podobieństw do obserwacji w zbiorze uczący. jaka klasa? x k Na przykład etykieta klasy dla nieznanej obserwacji (na rys. oznaczonej robe) oże być ustalona na podstawie etykiety najbliższego sąsiada. Po prawej zbiór punktów V(x k ) których odległość od pozostałych obserwacji x i jest większa od odległości od x k. Obszar V(x k ) = {x R 2 : i. d x, x k d x, x i } nazywany jest koórką Woronoja (ang. Voronoi cell) P. Szwed: Metody eksploracji danych (2016) 28
 Granice poiędzy dwoa obszarai wyznaczają syetralne odcinków łączących dwa punkty (w 2D) W przestrzeni wielowyiarowej koórki są wielobokai wypukłyi, a")
29 Diagra Woronoja Podział przestrzeni na koórki Woronoja nazywany jest diagrae Woronoja (ang. Voronoi tessalation) Granice poiędzy dwoa obszarai wyznaczają syetralne odcinków łączących dwa punkty (w 2D) W przestrzeni wielowyiarowej koórki są wielobokai wypukłyi, a ich ściany eleentai hiperpłaszczyzn P. Szwed: Metody eksploracji danych (2016) 29
30 Odległość + Odległość (etryka): to funkcja d: X X R 0 spełniająca 3 warunki 1. Identyczność d x, y = 0 x = y 2. Syetria d(x, y) = d(y, x) 3. Nierówność trójkąta: d x, z d x, y + d(y, z) Przykłady: Metryka Minkowskiego (X = R n ): d(x, y) = x i y i p n i=1 n i=1 Metryka Manhattan (p = 1): d(x, y) = x i y i n Metryka Euklidesa (p = 2): d(x, y) = x i y 2 i=1 i Metryka Czebyszewa (p = ): d(x, y) = ax x i y i i 1 p P. Szwed: Metody eksploracji danych (2016) 30
31 Podobieństwo Podobieństwo si: X X R jest funkcją o charakterze przeciwny do odległości (dla blisko położonych obiektów, d(x, y) = 0, si(x, y) przyjuje duże wartości. Często podobieństwo jest skalowane do przedziału [0,1]. Podobieństwo ające własność rozróżnialności obiektów spełnia: 1. si x, y = 1 x = y 2. si x, z si x, y + si y, z 1 Przykład: dla x, y R n podobieństwo cosinusowe: Nie zapewnia rozróżnialności obiektów si(x, y) = xt y x y Podobieństwo oże zostać przekształcone w (pół)etrykę : d(x, y) = 1 si(x, y) Warunek trójkąta nie usi być spełniony (stąd półetryka, ang. seietrc). Podobieństwo oże być zdefiniowane dla różnego typu obiektów bez konieczności wyznaczania ich cech w R n : ciągów syboli, zbiorów, grafów, itd. Funkcje jądra (kernele) K(x, y) ogą być postrzegane jako rodzaj podobieństwa. P. Szwed: Metody eksploracji danych (2016) 31
32 Różne iary odległości/podobieństwa Dla ziennych binarnych lub noinalnych d(x i, x j ) = 1 I(x i, x j ), gdzie I(a, b) to tzw. funkcja wskaźnikowa: I(a, b) = Dla ziennych będących zbiorai: odległość to tzw. odległość Hainga d(x i, x j ) = x i \x j (x j \x i ) podobieństwo definiuje się jako indeks Jaccarda: si x i, x j = x i x j x i x j 0, gdy a b 1, gdy a = b Dla ciągów syboli (np. tekstów) x j = (x 11,, x 1k ), x 2 = (x 21,, x 2 ), gdzie x 1j, x 2i A odległość Levenshteina to najniejsza liczba edycji: usunięć, zaian, przestawień przekształcających ciąg x 1 w x 2. P. Szwed: Metody eksploracji danych (2016) 32
33 Brakujące dane Przy obliczaniu odległości poiędzy obserwacjai x i i x j oże zdarzyć się, że dla pewnego atrybutu k dane nie są określone (reprezentowane przez sybol? ). Czyli na przykład x ik =? Strategia zachowawcza: Dla ziennych noinalnych zawsze I?, = I,? = 1 Dla ziennych nuerycznych, gdy x ik =? wybierana jest najbardziej odległa w stosunku do x jk wartość ze zbioru uczącego x ik arg ax x k X(k) { x k x jk } gdzie X(k) = {x ik : j = 1,, } Jeśli obie wartości nueryczne są nieokreślone, składnik odległości to: sup X k inf X(k) Strategia optyistyczna Dla ziennych noinalnych zawsze I?, = I,? = 1, ale I(?,? ) = 0 (równoważne dodaniu dodatkowej ziennej noinalnej?) Zastąpienie brakujących wartości średnii: x ik ean(x k ) Jeśli obie wartości nieokreślone, ich różnica wynosi 0 P. Szwed: Metody eksploracji danych (2016) 33
34 K najbliższych sąsiadów Niech D = { x i, y i : i = 1,, } będzie zbiore danych (uczący) Dla danej nieznanej obserwacji x uporządkujy D w postaci ciągu D(x) = ((x j, y j ): j = 1,, ), takiego, że j = 1, 1. d x, x j d(x, x j+1 ) Pierwszych k wyrazów ciągu D x definiuje N k (x), czyli k-eleentowe sąsiedztwo x: N k (x) ={(x k, y k ),, (x k, y k )} Dla zagadnienia regresji przewidywana wartość wyjściowa jest wartością średnią y w sąsiedztwie: Dla zagadnienia klasyfikacji: y x = 1 k x,y N k x y p(y = y x) = 1 k x,y N k x I(Y = y ) y x = arg ax p(y = y x) y Czyli przewidywaną klasą jest etykieta przeważająca wśród sąsiadów w N k (x). P. Szwed: Metody eksploracji danych (2016) 34

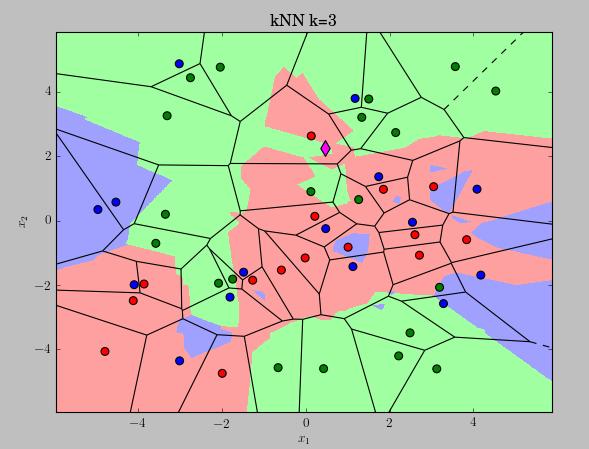


35 Przykłady P. Szwed: Metody eksploracji danych (2016) 35
 x,y N w(x, x )I(Y = y ) p(y = y x) = k x w(x, x ) x,y N k x Waga w(x, x ) jest")

36 Wagi Idea wprowadzenia wag polega na uwzględnieniu odległości klasyfikowanej obserwacji x od obserwacji w zbiorze najbliższych sąsiadów N k (x) x,y N w(x, x )I(Y = y ) p(y = y x) = k x w(x, x ) x,y N k x Waga w(x, x ) jest najczęściej odwrotnością odległości w x, x = 1 d(x,x ) lub funkcją w(d(x, x )) zdefiniowaną przez użytkownika. Ziana regionów decyzyjnych po zastosowaniu wag będących odwrotnością odległości P. Szwed: Metody eksploracji danych (2016) 36
37 Wyszukiwanie najbliższych sąsiadów Czas uczenia algorytu knn jest zerowy (odel jest po prostu zbiore instancji) Czas wyszukiwania najbliższych sąsiadów jest proporcjonalny do wielkości zbioru uczącego O(k n ). Działanie algorytu oże być wolne, jeżeli jest duże, np. 16 6, obserwacje przechowywane są w bazie danych itd. Metody przyspieszania wyszukiwania: Reprezentacja zbioru uczącego w postaci drzew: kd-tree lub ball tree Heurystyki ograniczające obliczanie odległości Ograniczanie zbioru analizowanych obserwacji P. Szwed: Metody eksploracji danych (2016) 37
38 kd-tree (k-wyiarowe drzewo) kd-tree jest drzewe binarny, w który kolejne węzły reprezentują podziały przestrzeni wzdłuż jednego z wyiarów Algoryt wyszukiwania najbliższych sąsiadów polega na: przejściu przez drzewo od korzenia do liścia (bloku, który zawiera badany punkt) znalezieniu najbliższego sąsiada sprawdzeniu, czy kula S o proieniu równy odległości od najbliższego sąsiada przecina węzeł bliźniaczy do liścia sprawdzenie przecięć dla węzłów bliźniaczych względe węzłów nadrzędnych i ich potoków (różowy czerwony zielony szarozielony) P. Szwed: Metody eksploracji danych (2016) 38
 P.")
39 Przykład Ostatecznie przeszukane zostaną kreskowane obszary poziou 6 (Rysunek na podstawie kodu zaczerpniętego z ) P. Szwed: Metody eksploracji danych (2016) 39
40 Konstrukcja kd-tree Algoryt rekurencyjny kdtree D: dane, N: node : 1. Jeżeli liczba punktów w węźle D in stop 2. Wybór kierunku podziału j: cyklicznie dla kolejnych wyiarów lub w kierunku największej zienności wartości 3. Podziel dane węzła na dwie części D 1 = {x D: x j < v j } i D 2 = {x D: x j v j }. Wartość podziału v j ustala się poprzez posortowanie danych i wyznaczenie ediany wartości jako wartość średnią 4. Utwórz dwa węzły potone N 1 i N 2 i wywołaj kdtree(d 1, N 1 ) i kdtree(d 2, N 2 ) P. Szwed: Metody eksploracji danych (2016) 40
41 Ball tree W drzewie Ball tree węzły reprezentują kule otaczające punkty w przestrzeni n-wyiarowej Ze względu na kształt bloków przypisanych węzło łatwiej jest wykluczyć przecięcia i przez to w rzeczywistych zastosowaniach (zwłaszcza dla większych wyiarów przestrzeni) złożoność wyszukiwania spada Porównanie liczby przecięć dla kd tree (czarna linia przerywana, 4 obszary) i Ball tree (niebieska linia przerywana dwie kule) P. Szwed: Metody eksploracji danych (2016) 41
42 Ball tree: algoryt wyszukiwania Algoryt przeszukuje rekurencyjnie drzewo składując znalezione punkty w kolejce sortowanej alejąco według odległości. Odcinane są kule, których środek jest bardziej odległy niż najdalszy punkt w kolejce. search(x, q: queue, n: node): if d x, n. center d(x, q. first()): return if(leaf(n)): przeszukaj punkty x w n i dodaj do q, jeśli d(x, x ) < d(x, q. first()) else: search(x, q, node. left) search(x, q, node. right) P. Szwed: Metody eksploracji danych (2016) 42

43 Ball tree - przykład Przeszukane zostaną kule przecinające się z różową elpsą P. Szwed: Metody eksploracji danych (2016) 43
 > sup {d x, x : x N k (x)} (czyli częściowo wyznaczona odległość jest większa, niż do najdalszego sąsiada w")
 Źródło: https://www.isll.uni-hildeshei.")
44 Inne opcje przyspieszenia obliczeń Częściowe wyznaczanie odległości r 2 Dla r < n oblicza się: d r (x, x ) = i=1 x i x i. Jeżeli d r (x, x ) > sup {d x, x : x N k (x)} (czyli częściowo wyznaczona odległość jest większa, niż do najdalszego sąsiada w bieżący otoczeniu) nie a sensu dalej prowadzić obliczeń. Redukcja zbioru obserwacji bez ziany granic regionów decyzyjnych (editing) Źródło: P. Szwed: Metody eksploracji danych (2016) 44
45 Typowe opcje knn Biblioteki ipleentujące knn zazwyczaj oferują następujące opcje: Przeszukanie wszystkich eleentów (brute force). Złożoność czasowa O n Ball tree Złożoność czasowa O n log kd-tree Dla ałych n 20, złożoność rzędu O n log Dla dużych n wzrasta do O n i ze względu na czas/zużycie paięci przy budowie drzewa oże być niej efektywne niż brute force Dodatkowe inforacje i dyskusja zależności od: paraetru k progu określającego inialną liczbę obserwacji w węźle potencjalnej liczby zapytań P. Szwed: Metody eksploracji danych (2016) 45
7. Maszyny wektorów podpierajacych SVMs
 Algorytmy rozpoznawania obrazów 7. Maszyny wektorów podpierajacych SVMs dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Maszyny wektorów podpierajacych - SVMs Maszyny wektorów podpierających (ang.
Algorytmy rozpoznawania obrazów 7. Maszyny wektorów podpierajacych SVMs dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Maszyny wektorów podpierajacych - SVMs Maszyny wektorów podpierających (ang.
Data Mining Wykład 6. Naiwny klasyfikator Bayes a Maszyna wektorów nośnych (SVM) Naiwny klasyfikator Bayesa.
 Naiwny klasyfikator Bayesa.") GLM (Generalized Linear Models) Data Mining Wykład 6 Naiwny klasyfikator Bayes a Maszyna wektorów nośnych (SVM) Naiwny klasyfikator Bayesa Naiwny klasyfikator Bayesa jest klasyfikatorem statystycznym -
GLM (Generalized Linear Models) Data Mining Wykład 6 Naiwny klasyfikator Bayes a Maszyna wektorów nośnych (SVM) Naiwny klasyfikator Bayesa Naiwny klasyfikator Bayesa jest klasyfikatorem statystycznym -
UCZENIE MASZYNOWE III - SVM. mgr inż. Adam Kupryjanow
 UCZENIE MASZYNOWE III - SVM mgr inż. Adam Kupryjanow Plan wykładu Wprowadzenie LSVM dane separowalne liniowo SVM dane nieseparowalne liniowo Nieliniowy SVM Kernel trick Przykłady zastosowań Historia 1992
UCZENIE MASZYNOWE III - SVM mgr inż. Adam Kupryjanow Plan wykładu Wprowadzenie LSVM dane separowalne liniowo SVM dane nieseparowalne liniowo Nieliniowy SVM Kernel trick Przykłady zastosowań Historia 1992
Interpolacja. Interpolacja wykorzystująca wielomian Newtona
 Interpolacja Funkcja y = f(x) jest dana w postaci dyskretnej: (1) y 1 = f(x 1 ), y 2 = f(x 2 ), y 3 = f(x 3 ), y n = f(x n ), y n +1 = f(x n +1 ), to znaczy, że w pewny przedziale x 1 ; x 2 Ú ziennej niezależnej
Interpolacja Funkcja y = f(x) jest dana w postaci dyskretnej: (1) y 1 = f(x 1 ), y 2 = f(x 2 ), y 3 = f(x 3 ), y n = f(x n ), y n +1 = f(x n +1 ), to znaczy, że w pewny przedziale x 1 ; x 2 Ú ziennej niezależnej
Wstęp do przetwarzania języka naturalnego. Wykład 11 Maszyna Wektorów Nośnych
 Wstęp do przetwarzania języka naturalnego Wykład 11 Wojciech Czarnecki 8 stycznia 2014 Section 1 Przypomnienie Wektoryzacja tfidf Przypomnienie document x y z Antony and Cleopatra 5.25 1.21 1.51 Julius
Wstęp do przetwarzania języka naturalnego Wykład 11 Wojciech Czarnecki 8 stycznia 2014 Section 1 Przypomnienie Wektoryzacja tfidf Przypomnienie document x y z Antony and Cleopatra 5.25 1.21 1.51 Julius
SVM: Maszyny Wektorów Podpieraja cych
 SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
Elementy inteligencji obliczeniowej
 Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
W ostatnim wykładzie doszliśmy do tego, że problem znalezienia klasyfikatora optymalnego pod względem marginesów można wyrazić w następujący sposób:
 Spis treści 1 Maszyny Wektorów Wspierających 2 1.1 SVM w formaliźmie Lagranga 1.2 Przejście do pstaci dualnej 1.2.1 Wyznaczenie parametrów modelu: 1.2.2 Klasyfikacja: 2 Funkcje jądrowe 2.1 Mapowanie do
Spis treści 1 Maszyny Wektorów Wspierających 2 1.1 SVM w formaliźmie Lagranga 1.2 Przejście do pstaci dualnej 1.2.1 Wyznaczenie parametrów modelu: 1.2.2 Klasyfikacja: 2 Funkcje jądrowe 2.1 Mapowanie do
Programowanie liniowe
 Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
Programowanie liniowe Maciej Drwal maciej.drwal@pwr.wroc.pl 1 Problem programowania liniowego min x c T x (1) Ax b, (2) x 0. (3) gdzie A R m n, c R n, b R m. Oznaczmy przez x rozwiązanie optymalne, tzn.
Kompresja danych Streszczenie Studia Dzienne Wykład 10,
 1 Kwantyzacja wektorowa Kompresja danych Streszczenie Studia Dzienne Wykład 10, 28.04.2006 Kwantyzacja wektorowa: dane dzielone na bloki (wektory), każdy blok kwantyzowany jako jeden element danych. Ogólny
1 Kwantyzacja wektorowa Kompresja danych Streszczenie Studia Dzienne Wykład 10, 28.04.2006 Kwantyzacja wektorowa: dane dzielone na bloki (wektory), każdy blok kwantyzowany jako jeden element danych. Ogólny
Matematyka licea ogólnokształcące, technika
 Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem
Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I
 Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Techniki Optymalizacji: Stochastyczny spadek wzdłuż gradientu I Wojciech Kotłowski Instytut Informatyki Politechniki Poznańskiej email: imię.nazwisko@cs.put.poznan.pl pok. 2 (CW) tel. (61)665-2936 konsultacje:
Klasyfikatory: k-nn oraz naiwny Bayesa. Agnieszka Nowak Brzezińska Wykład IV
 Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
Klasyfikatory: k-nn oraz naiwny Bayesa Agnieszka Nowak Brzezińska Wykład IV Naiwny klasyfikator Bayesa Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną
2. Szybka transformata Fouriera
 Szybka transforata Fouriera Wyznaczenie ciągu (Y 0, Y 1,, Y 1 ) przy użyciu DFT wyaga wykonania: nożenia zespolonego ( 1) razy, dodawania zespolonego ( 1) razy, przy założeniu, że wartości ω j są już dane
Szybka transforata Fouriera Wyznaczenie ciągu (Y 0, Y 1,, Y 1 ) przy użyciu DFT wyaga wykonania: nożenia zespolonego ( 1) razy, dodawania zespolonego ( 1) razy, przy założeniu, że wartości ω j są już dane
E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne
 E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne Przypominajka: 152 drzewo filogenetyczne to drzewo, którego liśćmi są istniejące gatunki, a węzły wewnętrzne mają stopień większy niż jeden i reprezentują
E: Rekonstrukcja ewolucji. Algorytmy filogenetyczne Przypominajka: 152 drzewo filogenetyczne to drzewo, którego liśćmi są istniejące gatunki, a węzły wewnętrzne mają stopień większy niż jeden i reprezentują
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych
 Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Agnieszka Nowak Brzezińska Wykład III
 Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Agnieszka Nowak Brzezińska Wykład III Naiwny klasyfikator bayesowski jest prostym probabilistycznym klasyfikatorem. Zakłada się wzajemną niezależność zmiennych niezależnych (tu naiwność) Bardziej opisowe
Popularne klasyfikatory w pakietach komputerowych
 Popularne klasyfikatory w pakietach komputerowych Klasyfikator liniowy Uogólniony klasyfikator liniowy SVM aiwny klasyfikator bayesowski Ocena klasyfikatora ROC Lista popularnych pakietów Klasyfikator
Popularne klasyfikatory w pakietach komputerowych Klasyfikator liniowy Uogólniony klasyfikator liniowy SVM aiwny klasyfikator bayesowski Ocena klasyfikatora ROC Lista popularnych pakietów Klasyfikator
Przestrzeń unitarna. Jacek Kłopotowski. 23 października Katedra Matematyki i Ekonomii Matematycznej SGH
 Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
Katedra Matematyki i Ekonomii Matematycznej SGH 23 października 2018 Definicja iloczynu skalarnego Definicja Iloczynem skalarnym w przestrzeni liniowej R n nazywamy odwzorowanie ( ) : R n R n R spełniające
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH
 FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
WYKŁAD: Perceptron Rosenblatta. Maszyny wektorów podpierających (SVM). Empiryczne reguły bayesowskie. Zaawansowane Metody Uczenia Maszynowego
. Empiryczne reguły bayesowskie. Zaawansowane Metody Uczenia Maszynowego") WYKŁAD: Perceptron Rosenblatta. Maszyny wektorów podpierających (SVM). Empiryczne reguły bayesowskie Zaawansowane Metody Uczenia Maszynowego Perceptron Rosenblatta Szukamy hiperpłaszczyzny β 0 + β 1 najlepiej
WYKŁAD: Perceptron Rosenblatta. Maszyny wektorów podpierających (SVM). Empiryczne reguły bayesowskie Zaawansowane Metody Uczenia Maszynowego Perceptron Rosenblatta Szukamy hiperpłaszczyzny β 0 + β 1 najlepiej
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa.
 VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
VII. Elementy teorii stabilności. Funkcja Lapunowa. 1. Stabilność w sensie Lapunowa. W rozdziale tym zajmiemy się dokładniej badaniem stabilności rozwiązań równania różniczkowego. Pojęcie stabilności w
5. Analiza dyskryminacyjna: FLD, LDA, QDA
 Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
Algorytmy rozpoznawania obrazów 5. Analiza dyskryminacyjna: FLD, LDA, QDA dr inż. Urszula Libal Politechnika Wrocławska 2015 1 1. Liniowe funkcje dyskryminacyjne Liniowe funkcje dyskryminacyjne mają ogólną
Algorytmy i Struktury Danych, 9. ćwiczenia
 Algorytmy i Struktury Danych, 9. ćwiczenia 206-2-09 Plan zajęć usuwanie z B-drzew join i split na 2-3-4 drzewach drzepce adresowanie otwarte w haszowaniu z analizą 2 B-drzewa definicja każdy węzeł ma następujące
Algorytmy i Struktury Danych, 9. ćwiczenia 206-2-09 Plan zajęć usuwanie z B-drzew join i split na 2-3-4 drzewach drzepce adresowanie otwarte w haszowaniu z analizą 2 B-drzewa definicja każdy węzeł ma następujące
Ontogeniczne sieci neuronowe. O sieciach zmieniających swoją strukturę
 Norbert Jankowski Ontogeniczne sieci neuronowe O sieciach zmieniających swoją strukturę Warszawa 2003 Opracowanie książki było wspierane stypendium Uniwersytetu Mikołaja Kopernika Spis treści Wprowadzenie
Norbert Jankowski Ontogeniczne sieci neuronowe O sieciach zmieniających swoją strukturę Warszawa 2003 Opracowanie książki było wspierane stypendium Uniwersytetu Mikołaja Kopernika Spis treści Wprowadzenie
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
 Klasyfikator liniowy Wstęp Klasyfikator liniowy jest najprostszym możliwym klasyfikatorem. Zakłada on liniową separację liniowy podział dwóch klas między sobą. Przedstawia to poniższy rysunek: 5 4 3 2
Klasyfikator liniowy Wstęp Klasyfikator liniowy jest najprostszym możliwym klasyfikatorem. Zakłada on liniową separację liniowy podział dwóch klas między sobą. Przedstawia to poniższy rysunek: 5 4 3 2
Parametryczny koder mowy - wokoder. Synteza mowy w odbiorniku: d=1 - mowa dźwięczna (T 0 = okres tonu krtaniowego) d=0 - mowa bezdźwięczna
 d=0 - mowa bezdźwięczna") Paraeryczny koder owy - wokoder Syneza owy w odbiorniku: d=1 - owa dźwięczna T 0 = okres onu kraniowego d=0 - owa bezdźwięczna Wokoder nadajnik Eksrakcja onu kraniowego 1. Przebieg czasowy sygnału i błędu
Paraeryczny koder owy - wokoder Syneza owy w odbiorniku: d=1 - owa dźwięczna T 0 = okres onu kraniowego d=0 - owa bezdźwięczna Wokoder nadajnik Eksrakcja onu kraniowego 1. Przebieg czasowy sygnału i błędu
WSPOMAGANIE DECYZJI - MIŁOSZ KADZIŃSKI LABORATORIUM VI METODA WĘGIERSKA
 WSPOMAGANIE DECYZJI - MIŁOSZ KADZIŃSKI LABORATORIUM VI METODA WĘGIERSKA 1. Proble przydziału. Należy przydzielić zadań do wykonawców. Każde zadanie oże być wykonywane przez co najwyżej jednego wykonawcę
WSPOMAGANIE DECYZJI - MIŁOSZ KADZIŃSKI LABORATORIUM VI METODA WĘGIERSKA 1. Proble przydziału. Należy przydzielić zadań do wykonawców. Każde zadanie oże być wykonywane przez co najwyżej jednego wykonawcę
Algorytmy Równoległe i Rozproszone Część V - Model PRAM II
 Algorytmy Równoległe i Rozproszone Część V - Model PRAM II Łukasz Kuszner pokój 209, WETI http://www.sphere.pl/ kuszner/ kuszner@sphere.pl Oficjalna strona wykładu http://www.sphere.pl/ kuszner/arir/ 2005/06
Algorytmy Równoległe i Rozproszone Część V - Model PRAM II Łukasz Kuszner pokój 209, WETI http://www.sphere.pl/ kuszner/ kuszner@sphere.pl Oficjalna strona wykładu http://www.sphere.pl/ kuszner/arir/ 2005/06
SIMR 2016/2017, Analiza 2, wykład 1, Przestrzeń wektorowa
 SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ. Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska
 SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska DRZEWO REGRESYJNE Sposób konstrukcji i przycinania
SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska DRZEWO REGRESYJNE Sposób konstrukcji i przycinania
Klasyfikator. ˆp(k x) = 1 K. I(ρ(x,x i ) ρ(x,x (K) ))I(y i =k),k =1,...,L,
 = 1 K. I(ρ(x,x i ) ρ(x,x (K) ))I(y i =k),k =1,...,L,") Klasyfikator Jedną z najistotniejszych nieparametrycznych metod klasyfikacji jest metoda K-najbliższych sąsiadów, oznaczana przez K-NN. W metodzie tej zaliczamy rozpoznawany obiekt do tej klasy, do której
Klasyfikator Jedną z najistotniejszych nieparametrycznych metod klasyfikacji jest metoda K-najbliższych sąsiadów, oznaczana przez K-NN. W metodzie tej zaliczamy rozpoznawany obiekt do tej klasy, do której
= = a na podstawie zadania 6 po p. 3.6 wiemy, że. b 1. a 2 ab b 2
 64 III. Zienne losowe jednowyiarowe D Ponieważ D (A) < D (B), więc należy wybrać partię A. Przykład 3.4. Obliczyć wariancję rozkładu jednostajnego. Ponieważ a na podstawie zadania 6 po p. 3.6 wiey, że
64 III. Zienne losowe jednowyiarowe D Ponieważ D (A) < D (B), więc należy wybrać partię A. Przykład 3.4. Obliczyć wariancję rozkładu jednostajnego. Ponieważ a na podstawie zadania 6 po p. 3.6 wiey, że
Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.
![Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.](/thumbs/98/135408382.jpg "Aproksymacja. j<k. L 2 p[a, b] l 2 p,n X = Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza przestrzeni liniowej Π n. Dowód.") Metody numeryczne Paweł Zieliński p. 1/19 Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza bazę przestrzeni liniowej Π n. Dowód. Lemat 2. Dowolny wielomian Q j stopnia j niższego od k jest prostopadły
Metody numeryczne Paweł Zieliński p. 1/19 Lemat 1. Wielomiany ortogonalne P 0,P 1,...,P n tworza bazę przestrzeni liniowej Π n. Dowód. Lemat 2. Dowolny wielomian Q j stopnia j niższego od k jest prostopadły
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta
 Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
3. FUNKCJA LINIOWA. gdzie ; ół,.
 1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
1 WYKŁAD 3 3. FUNKCJA LINIOWA FUNKCJĄ LINIOWĄ nazywamy funkcję typu : dla, gdzie ; ół,. Załóżmy na początek, że wyraz wolny. Wtedy mamy do czynienia z funkcją typu :.. Wykresem tej funkcji jest prosta
SAS wybrane elementy. DATA MINING Część III. Seweryn Kowalski 2006
 SAS wybrane elementy DATA MINING Część III Seweryn Kowalski 2006 Algorytmy eksploracji danych Algorytm eksploracji danych jest dobrze zdefiniowaną procedurą, która na wejściu otrzymuje dane, a na wyjściu
SAS wybrane elementy DATA MINING Część III Seweryn Kowalski 2006 Algorytmy eksploracji danych Algorytm eksploracji danych jest dobrze zdefiniowaną procedurą, która na wejściu otrzymuje dane, a na wyjściu
Interpolacja. Marcin Orchel. Drugi przypadek szczególny to interpolacja trygonometryczna
 Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Eksploracja Danych. wykład 4. Sebastian Zając. 10 maja 2017 WMP.SNŚ UKSW. Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja / 18
 Eksploracja Danych 10 maja / 18") Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
Eksploracja Danych wykład 4 Sebastian Zając WMP.SNŚ UKSW 10 maja 2017 Sebastian Zając (WMP.SNŚ UKSW) Eksploracja Danych 10 maja 2017 1 / 18 Klasyfikacja danych Klasyfikacja Najczęściej stosowana (najstarsza)
Definicja i własności wartości bezwzględnej.
 Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
Równania i nierówności z wartością bezwzględną. Rozwiązywanie układów dwóch (trzech) równań z dwiema (trzema) niewiadomymi. Układy równań liniowych z parametrem, analiza rozwiązań. Definicja i własności
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Zadania egzaminacyjne
 Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Rozdział 13 Zadania egzaminacyjne Egzamin z algebry liniowej AiR termin I 03022011 Zadanie 1 Wyznacz sumę rozwiązań równania: (8z + 1 i 2 2 7 iz 4 = 0 Zadanie 2 Niech u 0 = (1, 2, 1 Rozważmy odwzorowanie
Sztuczna inteligencja : Algorytm KNN
 Instytut Informatyki Uniwersytetu Śląskiego 23 kwietnia 2012 1 Algorytm 1 NN 2 Algorytm knn 3 Zadania Klasyfikacja obiektów w oparciu o najbliższe obiekty: Algorytm 1-NN - najbliższego sąsiada. Parametr
Instytut Informatyki Uniwersytetu Śląskiego 23 kwietnia 2012 1 Algorytm 1 NN 2 Algorytm knn 3 Zadania Klasyfikacja obiektów w oparciu o najbliższe obiekty: Algorytm 1-NN - najbliższego sąsiada. Parametr
Systemy uczące się Lab 4
 Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Metody eksploracji danych 2. Metody regresji. Piotr Szwed Katedra Informatyki Stosowanej AGH 2017
 Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
Metody eksploracji danych 2. Metody regresji Piotr Szwed Katedra Informatyki Stosowanej AGH 2017 Zagadnienie regresji Dane: Zbiór uczący: D = {(x i, y i )} i=1,m Obserwacje: (x i, y i ), wektor cech x
Adrian Horzyk
 Metody Inteligencji Obliczeniowej Metoda K Najbliższych Sąsiadów (KNN) Adrian Horzyk horzyk@agh.edu.pl AGH Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Metody Inteligencji Obliczeniowej Metoda K Najbliższych Sąsiadów (KNN) Adrian Horzyk horzyk@agh.edu.pl AGH Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Metody iteracyjne rozwiązywania układów równań liniowych (5.3) Normy wektorów i macierzy (5.3.1) Niech. x i. i =1
 Normy wektorów i macierzy (5.3.1) Niech. x i. i =1") Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
Normy wektorów i macierzy (5.3.1) Niech 1 X =[x x Y y =[y1 x n], oznaczają wektory przestrzeni R n, a yn] niech oznacza liczbę rzeczywistą. Wyrażenie x i p 5.3.1.a X p = p n i =1 nosi nazwę p-tej normy
Analiza składowych głównych. Wprowadzenie
 Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
METODY INŻYNIERII WIEDZY Metoda K Najbliższych Sąsiadów K-Nearest Neighbours (KNN) ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. - funkcja dwóch zmiennych,
 IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Metody systemowe i decyzyjne w informatyce Laboratorium JAVA Zadanie nr 2 Rozpoznawanie liter autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z problemem klasyfikacji
Algorytmy metaheurystyczne Wykład 11. Piotr Syga
 Algorytmy metaheurystyczne Wykład 11 Piotr Syga 22.05.2017 Drzewa decyzyjne Idea Cel Na podstawie przesłanek (typowo zbiory rozmyte) oraz zbioru wartości w danych testowych, w oparciu o wybrane miary,
Algorytmy metaheurystyczne Wykład 11 Piotr Syga 22.05.2017 Drzewa decyzyjne Idea Cel Na podstawie przesłanek (typowo zbiory rozmyte) oraz zbioru wartości w danych testowych, w oparciu o wybrane miary,
Metody sztucznej inteligencji Zadanie 3: (1) klasteryzacja samoorganizująca się mapa Kohonena, (2) aproksymacja sieć RBF.
 klasteryzacja samoorganizująca się mapa Kohonena, (2) aproksymacja sieć RBF.") Metody sztucznej inteligencji Zadanie 3: ( klasteryzacja samoorganizująca się mapa Kohonena, (2 aproksymacja sieć RBF dr inż Przemysław Klęsk Klasteryzacja za pomocą samoorganizującej się mapy Kohonena
Metody sztucznej inteligencji Zadanie 3: ( klasteryzacja samoorganizująca się mapa Kohonena, (2 aproksymacja sieć RBF dr inż Przemysław Klęsk Klasteryzacja za pomocą samoorganizującej się mapy Kohonena
Metody Sztucznej Inteligencji II
 17 marca 2013 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką, która jest w stanie odbierać i przekazywać sygnały elektryczne. Neuron działanie Jeżeli wartość sygnału
17 marca 2013 Neuron biologiczny Neuron Jest podstawowym budulcem układu nerwowego. Jest komórką, która jest w stanie odbierać i przekazywać sygnały elektryczne. Neuron działanie Jeżeli wartość sygnału
Agnieszka Nowak Brzezińska
 Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
Agnieszka Nowak Brzezińska jeden z algorytmów regresji nieparametrycznej używanych w statystyce do prognozowania wartości pewnej zmiennej losowej. Może również byd używany do klasyfikacji. - Założenia
Zbiory wypukłe i stożki
 Katedra Matematyki i Ekonomii Matematycznej 28 kwietnia 2016 Hiperpłaszczyzna i półprzestrzeń Definicja Niech a R n, a 0, b R. Zbiór H(a, b) = {x R n : (a x) = b} nazywamy hiperpłaszczyzną, zbiory {x R
Katedra Matematyki i Ekonomii Matematycznej 28 kwietnia 2016 Hiperpłaszczyzna i półprzestrzeń Definicja Niech a R n, a 0, b R. Zbiór H(a, b) = {x R n : (a x) = b} nazywamy hiperpłaszczyzną, zbiory {x R
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka Adaline.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Funkcje liniowe i wieloliniowe w praktyce szkolnej. Opracowanie : mgr inż. Renata Rzepińska
 Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Funkcje liniowe i wieloliniowe w praktyce szkolnej Opracowanie : mgr inż. Renata Rzepińska . Wprowadzenie pojęcia funkcji liniowej w nauczaniu matematyki w gimnazjum. W programie nauczania matematyki w
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
CEL PRACY ZAKRES PRACY
 CEL PRACY. Analiza energetycznych kryteriów zęczenia wieloosiowego pod względe zastosowanych ateriałów, rodzajów obciążenia, wpływu koncentratora naprężenia i zakresu stosowalności dla ałej i dużej liczby
CEL PRACY. Analiza energetycznych kryteriów zęczenia wieloosiowego pod względe zastosowanych ateriałów, rodzajów obciążenia, wpływu koncentratora naprężenia i zakresu stosowalności dla ałej i dużej liczby
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW. Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska.
 SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska INFORMACJE WSTĘPNE Hipotezy do uczenia się lub tworzenia
SYSTEMY UCZĄCE SIĘ WYKŁAD 10. PRZEKSZTAŁCANIE ATRYBUTÓW Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska INFORMACJE WSTĘPNE Hipotezy do uczenia się lub tworzenia
Zagadnienia brzegowe dla równań eliptycznych
 Temat 7 Zagadnienia brzegowe dla równań eliptycznych Rozważmy płaski obszar R 2 ograniczony krzywą. la równania Laplace a (Poissona) stawia się trzy podstawowe zagadnienia brzegowe. Zagadnienie irichleta
Temat 7 Zagadnienia brzegowe dla równań eliptycznych Rozważmy płaski obszar R 2 ograniczony krzywą. la równania Laplace a (Poissona) stawia się trzy podstawowe zagadnienia brzegowe. Zagadnienie irichleta
macierze jednostkowe (identyczności) macierze diagonalne, które na przekątnej mają same
 macierze diagonalne, które na przekątnej mają same") 1 Macierz definicja i zapis Macierzą wymiaru m na n nazywamy tabelę a 11 a 1n A = a m1 a mn złożoną z liczb (rzeczywistych lub zespolonych) o m wierszach i n kolumnach (zamiennie będziemy też czasem mówili,
1 Macierz definicja i zapis Macierzą wymiaru m na n nazywamy tabelę a 11 a 1n A = a m1 a mn złożoną z liczb (rzeczywistych lub zespolonych) o m wierszach i n kolumnach (zamiennie będziemy też czasem mówili,
Wstęp do sieci neuronowych, wykład 07 Uczenie nienadzorowane.
 Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 212-11-28 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 212-11-28 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Równania trygonometryczne z parametrem- inne spojrzenie
 Agnieszka Zielińska aga7ziel@wppl Nauczyciel ateatyki w III Liceu Ogólnokształcący w Zaościu Równania trygonoetryczne z paraetre- inne spojrzenie Cele tego reeratu jest zapoznanie państwa z oii etodai
Agnieszka Zielińska aga7ziel@wppl Nauczyciel ateatyki w III Liceu Ogólnokształcący w Zaościu Równania trygonoetryczne z paraetre- inne spojrzenie Cele tego reeratu jest zapoznanie państwa z oii etodai
( ) Arkusz I Zadanie 1. Wartość bezwzględna Rozwiąż równanie. Naszkicujmy wykresy funkcji f ( x) = x + 3 oraz g ( x) 2x
 Arkusz I Zadanie 1. Wartość bezwzględna Rozwiąż równanie. Naszkicujmy wykresy funkcji f ( x) = x + 3 oraz g ( x) 2x") Arkusz I Zadanie. Wartość bezwzględna Rozwiąż równanie x + 3 x 4 x 7. Naszkicujmy wykresy funkcji f ( x) x + 3 oraz g ( x) x 4 uwzględniając tylko ich miejsca zerowe i monotoniczność w ten sposób znajdziemy
Arkusz I Zadanie. Wartość bezwzględna Rozwiąż równanie x + 3 x 4 x 7. Naszkicujmy wykresy funkcji f ( x) x + 3 oraz g ( x) x 4 uwzględniając tylko ich miejsca zerowe i monotoniczność w ten sposób znajdziemy
RÓWNANIA NIELINIOWE Maciej Patan
 RÓWNANIA NIELINIOWE Maciej Patan Uniwersytet Zielonogórski Przykład 1 Prędkość v spadającego spadochroniarza wyraża się zależnością v = mg ( 1 e c t) m c gdzie g = 9.81 m/s 2. Dla współczynnika oporu c
RÓWNANIA NIELINIOWE Maciej Patan Uniwersytet Zielonogórski Przykład 1 Prędkość v spadającego spadochroniarza wyraża się zależnością v = mg ( 1 e c t) m c gdzie g = 9.81 m/s 2. Dla współczynnika oporu c
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne. materiały do ćwiczeń dla studentów. 1. Teoria błędów, notacja O
 Metody nueryczne ateriały do ćwiczeń dla studentów 1. Teoria błędów, notacja O 1.1. Błąd bezwzględny, błąd względny 1.2. Ogólna postać błędu 1.3. Proble odwrotny teorii błędów - zasada równego wpływu -
Metody nueryczne ateriały do ćwiczeń dla studentów 1. Teoria błędów, notacja O 1.1. Błąd bezwzględny, błąd względny 1.2. Ogólna postać błędu 1.3. Proble odwrotny teorii błędów - zasada równego wpływu -
Funkcje wymierne. Jerzy Rutkowski. Działania dodawania i mnożenia funkcji wymiernych określa się wzorami: g h + k l g h k.
 Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
Funkcje wymierne Jerzy Rutkowski Teoria Przypomnijmy, że przez R[x] oznaczamy zbiór wszystkich wielomianów zmiennej x i o współczynnikach rzeczywistych Definicja Funkcją wymierną jednej zmiennej nazywamy
jest ciągiem elementów z przestrzeni B(R, R)
") Wykład 2 1 Ciągi Definicja 1.1 (ciąg) Ciągiem w zbiorze X nazywamy odwzorowanie x: N X. Dla uproszczenia piszemy x n zamiast x(n). Przykład 1. x n = n jest ciągiem elementów z przestrzeni R 2. f n (x)
Wykład 2 1 Ciągi Definicja 1.1 (ciąg) Ciągiem w zbiorze X nazywamy odwzorowanie x: N X. Dla uproszczenia piszemy x n zamiast x(n). Przykład 1. x n = n jest ciągiem elementów z przestrzeni R 2. f n (x)
Rachunek różniczkowy i całkowy w przestrzeniach R n
 Rachunek różniczkowy i całkowy w przestrzeniach R n Na dzisiejszym wykładzie rozważać będziemy funkcje f : R m R n Każda taka funkcję f można przedstawić jako wektor funkcji (f 1, f 2,, f n ), gdzie każda
Rachunek różniczkowy i całkowy w przestrzeniach R n Na dzisiejszym wykładzie rozważać będziemy funkcje f : R m R n Każda taka funkcję f można przedstawić jako wektor funkcji (f 1, f 2,, f n ), gdzie każda
Optymalizacja ciągła
 Optymalizacja ciągła 1. Optymalizacja funkcji jednej zmiennej Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.02.2019 1 / 54 Plan wykładu Optymalizacja funkcji jednej
Optymalizacja ciągła 1. Optymalizacja funkcji jednej zmiennej Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.02.2019 1 / 54 Plan wykładu Optymalizacja funkcji jednej
Wstęp do sieci neuronowych, wykład 07 Uczenie nienadzorowane.
 Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 213-11-19 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 213-11-19 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
n=0 (n + r)a n x n+r 1 (n + r)(n + r 1)a n x n+r 2. Wykorzystując te obliczenia otrzymujemy, że lewa strona równania (1) jest równa
a n x n+r 1 (n + r)(n + r 1)a n x n+r 2. Wykorzystując te obliczenia otrzymujemy, że lewa strona równania (1) jest równa") Równanie Bessela Będziemy rozważać następujące równanie Bessela x y xy x ν )y 0 ) gdzie ν 0 jest pewnym parametrem Rozwiązania równania ) nazywamy funkcjami Bessela rzędu ν Sprawdzamy, że x 0 jest regularnym
Równanie Bessela Będziemy rozważać następujące równanie Bessela x y xy x ν )y 0 ) gdzie ν 0 jest pewnym parametrem Rozwiązania równania ) nazywamy funkcjami Bessela rzędu ν Sprawdzamy, że x 0 jest regularnym
MACIERZE. ZWIĄZEK Z ODWZOROWANIAMI LINIOWYMI.
 MAIERZE. ZWIĄZEK Z ODWZOROWANIAMI LINIOWYMI. k { 1,,..., k} Definicja 1. Macierzą nazyway każde odwzorowanie określone na iloczynie kartezjański.wartość tego odwzorowania na parze (i,j) k j oznaczay aij
MAIERZE. ZWIĄZEK Z ODWZOROWANIAMI LINIOWYMI. k { 1,,..., k} Definicja 1. Macierzą nazyway każde odwzorowanie określone na iloczynie kartezjański.wartość tego odwzorowania na parze (i,j) k j oznaczay aij
Klasyfikacja LDA + walidacja
 Klasyfikacja LDA + walidacja Dr hab. Izabela Rejer Wydział Informatyki Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Plan wykładu 1. Klasyfikator 2. LDA 3. Klasyfikacja wieloklasowa 4. Walidacja
Klasyfikacja LDA + walidacja Dr hab. Izabela Rejer Wydział Informatyki Zachodniopomorski Uniwersytet Technologiczny w Szczecinie Plan wykładu 1. Klasyfikator 2. LDA 3. Klasyfikacja wieloklasowa 4. Walidacja
Definicja pliku kratowego
 Pliki kratowe Definicja pliku kratowego Plik kratowy (ang grid file) jest strukturą wspierająca realizację zapytań wielowymiarowych Uporządkowanie rekordów, zawierających dane wielowymiarowe w pliku kratowym,
Pliki kratowe Definicja pliku kratowego Plik kratowy (ang grid file) jest strukturą wspierająca realizację zapytań wielowymiarowych Uporządkowanie rekordów, zawierających dane wielowymiarowe w pliku kratowym,
Rozwiązania zadań testowych. a n, że a 1 = 5 oraz a n = 100. Podać sumy następujących n=1
 Egzamin licencjacki (rozwiązania zadań) - 1-3 czerwca 014 r. Rozwiązania zadań testowych 1. Dany jest taki szereg zbieżny a n, że a 1 = 5 oraz a n = 100. Podać sumy następujących szeregów: a) (a n+1 +a
Egzamin licencjacki (rozwiązania zadań) - 1-3 czerwca 014 r. Rozwiązania zadań testowych 1. Dany jest taki szereg zbieżny a n, że a 1 = 5 oraz a n = 100. Podać sumy następujących szeregów: a) (a n+1 +a
Wprowadzenie Metoda bisekcji Metoda regula falsi Metoda siecznych Metoda stycznych RÓWNANIA NIELINIOWE
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
cx cx 1,cx 2,cx 3,...,cx n. Przykład 4, 5
 Matematyka ZLic - 07 Wektory i macierze Wektorem rzeczywistym n-wymiarowym x x 1, x 2,,x n nazwiemy ciąg n liczb rzeczywistych (tzn odwzorowanie 1, 2,,n R) Zbiór wszystkich rzeczywistych n-wymiarowych
Matematyka ZLic - 07 Wektory i macierze Wektorem rzeczywistym n-wymiarowym x x 1, x 2,,x n nazwiemy ciąg n liczb rzeczywistych (tzn odwzorowanie 1, 2,,n R) Zbiór wszystkich rzeczywistych n-wymiarowych
Uczenie się pojedynczego neuronu. Jeśli zastosowana zostanie funkcja bipolarna s y: y=-1 gdy z<0 y=1 gdy z>=0. Wówczas: W 1 x 1 + w 2 x 2 + = 0
 Uczenie się pojedynczego neuronu W0 X0=1 W1 x1 W2 s f y x2 Wp xp p x i w i=x w+wo i=0 Jeśli zastosowana zostanie funkcja bipolarna s y: y=-1 gdy z=0 Wówczas: W 1 x 1 + w 2 x 2 + = 0 Algorytm
Uczenie się pojedynczego neuronu W0 X0=1 W1 x1 W2 s f y x2 Wp xp p x i w i=x w+wo i=0 Jeśli zastosowana zostanie funkcja bipolarna s y: y=-1 gdy z=0 Wówczas: W 1 x 1 + w 2 x 2 + = 0 Algorytm
Rozwiązywanie równań nieliniowych
 Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
Macierze. Rozdział Działania na macierzach
 Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i, j) (i 1,..., n; j 1,..., m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F R lub F C, nazywamy macierzą (rzeczywistą, gdy
Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i, j) (i 1,..., n; j 1,..., m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F R lub F C, nazywamy macierzą (rzeczywistą, gdy
dodatkowe operacje dla kopca binarnego: typu min oraz typu max:
 ASD - ćwiczenia IX Kopce binarne własność porządku kopca gdzie dla każdej trójki wierzchołków kopca (X, Y, Z) porządek etykiet elem jest następujący X.elem Y.elem oraz Z.elem Y.elem w przypadku kopca typu
ASD - ćwiczenia IX Kopce binarne własność porządku kopca gdzie dla każdej trójki wierzchołków kopca (X, Y, Z) porządek etykiet elem jest następujący X.elem Y.elem oraz Z.elem Y.elem w przypadku kopca typu
Biometria WYKŁAD 7: ROZPOZNAWANIE I KLASYFIKACJA OBIEKTÓW
 Biometria WYKŁAD 7: ROZPOZNAWANIE I KLASYFIKACJA OBIEKTÓW http://ryszardtadeusiewicz.natemat.pl/151007,klasyka-sztucznej-inteligencji-rozpoznawanie-obrazow Cechy i przestrzenie cech Każda z właściwości
Biometria WYKŁAD 7: ROZPOZNAWANIE I KLASYFIKACJA OBIEKTÓW http://ryszardtadeusiewicz.natemat.pl/151007,klasyka-sztucznej-inteligencji-rozpoznawanie-obrazow Cechy i przestrzenie cech Każda z właściwości
Regresja nieparametryczna series estimator
 Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Systemy uczące się wykład 2
 Systemy uczące się wykład 2 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 19 X 2018 Podstawowe definicje Fakt; Przesłanka; Konkluzja; Reguła; Wnioskowanie. Typy wnioskowania
Systemy uczące się wykład 2 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 19 X 2018 Podstawowe definicje Fakt; Przesłanka; Konkluzja; Reguła; Wnioskowanie. Typy wnioskowania
POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko
POD- I NADOKREŚLONE UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko
METODY INŻYNIERII WIEDZY
 METODY INŻYNIERII WIEDZY WALIDACJA KRZYŻOWA dla ZAAWANSOWANEGO KLASYFIKATORA KNN ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
METODY INŻYNIERII WIEDZY WALIDACJA KRZYŻOWA dla ZAAWANSOWANEGO KLASYFIKATORA KNN ĆWICZENIA Adrian Horzyk Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Rozdział 5. Macierze. a 11 a a 1m a 21 a a 2m... a n1 a n2... a nm
 Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i,j) (i = 1,,n;j = 1,,m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F = R lub F = C, nazywamy macierzą (rzeczywistą, gdy F
Rozdział 5 Macierze Funkcję, która każdej parze liczb naturalnych (i,j) (i = 1,,n;j = 1,,m) przyporządkowuje dokładnie jedną liczbę a ij F, gdzie F = R lub F = C, nazywamy macierzą (rzeczywistą, gdy F
Elementy modelowania matematycznego
 Elementy modelowania matematycznego Modelowanie algorytmów klasyfikujących. Podejście probabilistyczne. Naiwny klasyfikator bayesowski. Modelowanie danych metodą najbliższych sąsiadów. Jakub Wróblewski
Elementy modelowania matematycznego Modelowanie algorytmów klasyfikujących. Podejście probabilistyczne. Naiwny klasyfikator bayesowski. Modelowanie danych metodą najbliższych sąsiadów. Jakub Wróblewski
Matematyka rozszerzona matura 2017
 Matematyka rozszerzona matura 017 Zadanie 1 Liczba ( 3 + 3) jest równa A. B. 4 C. 3 D. 3 ( 3 + 3) = 3 ( 3)( + 3) + + 3 = A. 3 4 3 + + 3 = 4 1 = 4 = Zadanie. Nieskończony ciąg liczbowy jest określony wzorem
Matematyka rozszerzona matura 017 Zadanie 1 Liczba ( 3 + 3) jest równa A. B. 4 C. 3 D. 3 ( 3 + 3) = 3 ( 3)( + 3) + + 3 = A. 3 4 3 + + 3 = 4 1 = 4 = Zadanie. Nieskończony ciąg liczbowy jest określony wzorem