Przegląd 4 Aerodynamika, algorytmy genetyczne, duże kroki i dynamika pozycji. Modelowanie fizyczne w animacji komputerowej Maciej Matyka
|
|
|
- Zuzanna Kania
- 6 lat temu
- Przeglądów:
Transkrypt
1 Przegląd 4 Aerodynamika, algorytmy genetyczne, duże kroki i dynamika pozycji Modelowanie fizyczne w animacji komputerowej Maciej Matyka
2 Wykład z Modelowania przegląd 4 1. Animation Aerodynamics 2. Algorytmy Genetyczne 3. Duże kroki w symulacji tkanin 4. Dynamika oparta na pozycji (nie siłach)

3 Animation Aerodynamics
4 Równania Naviera-Stookesa
5 Tu mają rozwiązanie analityczne!
6 Animation Aerodynamics, 1991 Wejchert, J. et. al.
7 Prymitywy we współrzędnych cylindrycznych

8 Animation Aerodynamics, 1991 Wejchert, J. et. al.
9 Siła Stokes a
10 Siła wiatru n n u (można też dodać siłę pochodzącą od względnej różnicę prędkości - tarcie..)
11 Siła wiatru n n F = n * (n * u) Iloczyn skalarny u (można też dodać siłę pochodzącą od względnej różnicę prędkości - tarcie..)
12 Siły dla każdego trójkąta

13 Czasem zdarza się i tak...

14 Podobny model w działaniu


15 J. Wejchert, D. Haumann, Animation Aerodynamics Computer Graphics, Volume 25, Number 4, July 1991
16 Algorytmy Genetyczne Genetic Cars (WWW) Medium.com article
17 Który z obiektów lepiej będzie chodził?
18
19
20 Rozwiązanie problemu z użyciem algorytmów genetycznych wymaga: - zakodowania cech naszego układu (obiektu) w postaci łańcucha znaków lub symboli (genom) tak, aby z niego można było wygenerować rozwiązanie (osobnik) - rozwiązanie może być wtedy mutowane przez zmianę symboli w tym łańcuchu znaków (genomie) w sposób losowy - pomiar tzw. fitness, czyli miary określającej jak blisko jesteśmy naszego rozwiązania (osobnika) poprawnego
21 Algorytm Algorytm genetyczny polega na minimalizacji miary fitness z użyciem mutacji genomu naszego osobnika. Osobnikiem może być zwierzę, człowiek, wirus to w biologii, ale też rysunek, animacja, obiekt fizyczny (i to interesuje nas tutaj).
22 Algorytm c.d. 1. Wygeneruj genom pierwszego osobnika matki 2. Zmierz fitness matki 3. Wykonaj losową mutację genomu 4. Wygeneruj nowego osobnika (dziecko) 5. Zmierz fitness dziecka 6. Jeśli fitness dziecka jest większy od fitnessu matki przepisz genom dziecka do genomu matki 7. Idź do kroku 3.
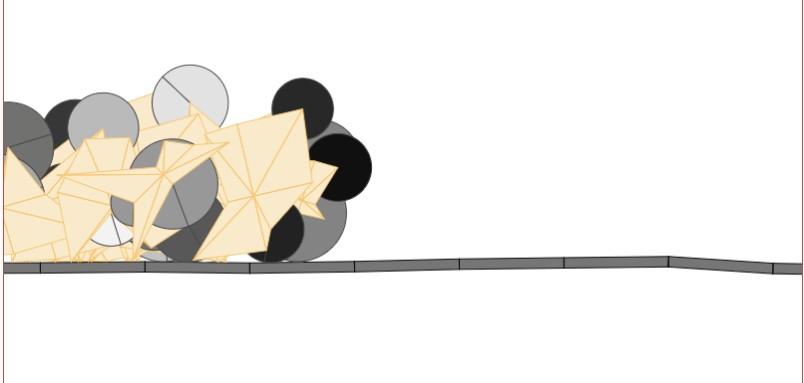
23 Kompresja rysunku (Algorytm Genetuczny) Jak przybliżyć rysunek za pomocą zbioru przeźroczystych figur (tu kółek)? Genom koduje: - Pozycję N kół - Ich kolory R,G,B - Stopień przeźroczystości Osobnik: rysunek (zbiór wartości R,G,B) Fitness stopień podobieństwa do Oryginału

24 265 mutacji

25 2203 mutacje

26 10119 mutacji
27 mutacji
28 Oryginał mutacji
29 + sensory + mutacje / ewolucja
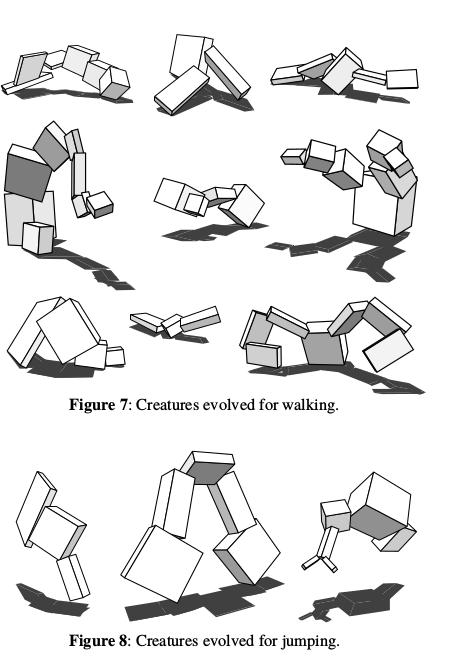
30 Wyniki




31 Karl Sims Karl Sims - Evolved Virtual Creatures, Evolution Simulation, 1994 [360p].mp4 Karl Sims - Evolved Virtual Creatures, Evolution Simulation, 1994

32 Genetyka + symulacje w akcji Harnessing evolutionary creativity_ evolving soft-bodied animats in simulated physical environments [720p]
33 Duże kroki w symulacji tkanin (Large Steps in Cloth Simulation)


34 Budowa modeli tkanin
35 Problemy z całkowaniem w Spring-Mass Krok czasowy musi być mały Też w przypadku Verleta i MidPoint Metody Euler/Verlet/MidPoint są jawne
36
37 Large Steps... w pigułce Metoda niejawna całkowania równań ruchu Układ równań liniowych Macierz rzadka Metoda iteracyjna gradientów sprzężonych (Conjugate Gradient) Możemy użyć... dowolnie dużego kroku czasowego DT

38 Large Steps in Cloth Simulation David Baraff Andrew Witkin
 https://www.youtube.com/watch?")
39 Aplikacja Cloth + kolizje + całkowanie (?)
40 Position Based Dynamics

41
42 Standardowy model z siłami rozpoznana kolizja Wyliczamy siły Przyspieszenia prędkości Przesuwamy ciała - Opóźnienie w reakcji - Nie można ustawić dużego ks - czyli problemy z krokiem czasowym (oscylacje)
43 Dynamika bez przyspieszeń rozpoznana kolizja przesuń tak, aby nie Kolidowały ze sobą koryguj prędkości
44 Algorytm symulacji PBD Inicjalizuj x0, v0 Pętla v(n) v(n) + dt * f(x(n)) p x(n) + dt * v(n) x(n+1) modyfikuj p korekta pozycji u wylicz prędkość (x(n+1)-x(n)) / dt v(n+1) u korekta prędkości Koniec pętli

45 Sprężynki z PBD Wprowadzamy wagi dla więzów (tu w1 i w2) Kolejne ograniczenia ruchu (siły) to będą więzy z różnymi wagami Iteracje Gaussa-Seidla (tego już nie będziemy omawiać na wykładzie)



46 PBD w działaniu Position Based Dynamics [360p].mp4
47 Koniec
Modelowanie Fizyczne w Animacji Komputerowej
 Modelowanie Fizyczne w Animacji Komputerowej Wykład 2 Dynamika Bryły Sztywnej Animacja w Blenderze Maciej Matyka http://panoramix.ift.uni.wroc.pl/~maq/ Rigid Body Dynamics https://youtu.be/_e70usvrjra
Modelowanie Fizyczne w Animacji Komputerowej Wykład 2 Dynamika Bryły Sztywnej Animacja w Blenderze Maciej Matyka http://panoramix.ift.uni.wroc.pl/~maq/ Rigid Body Dynamics https://youtu.be/_e70usvrjra
Algorytmy genetyczne. Materiały do laboratorium PSI. Studia stacjonarne i niestacjonarne
 Algorytmy genetyczne Materiały do laboratorium PSI Studia stacjonarne i niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki,
Algorytmy genetyczne Materiały do laboratorium PSI Studia stacjonarne i niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki,
Algorytmy genetyczne. Materiały do laboratorium PSI. Studia niestacjonarne
 Algorytmy genetyczne Materiały do laboratorium PSI Studia niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki, pojęć
Algorytmy genetyczne Materiały do laboratorium PSI Studia niestacjonarne Podstawowy algorytm genetyczny (PAG) Schemat blokowy algorytmu genetycznego Znaczenia, pochodzących z biologii i genetyki, pojęć
Inżynierskie metody numeryczne II. Konsultacje: wtorek 8-9:30. Wykład
 Inżynierskie metody numeryczne II Konsultacje: wtorek 8-9:30 Wykład Metody numeryczne dla równań hiperbolicznych Równanie przewodnictwa cieplnego. Prawo Fouriera i Newtona. Rozwiązania problemów 1D metodą
Inżynierskie metody numeryczne II Konsultacje: wtorek 8-9:30 Wykład Metody numeryczne dla równań hiperbolicznych Równanie przewodnictwa cieplnego. Prawo Fouriera i Newtona. Rozwiązania problemów 1D metodą
Modelowanie i Animacja
 Maciej Matyka Uniwersytet Wrocławski Maciej Matyka Plan wykładu Dlaczego animujemy używając komputera? Dlaczego animujemy używając komputera? Wyciąg z minimum programowego fizyki w liceum... Kinematyka
Maciej Matyka Uniwersytet Wrocławski Maciej Matyka Plan wykładu Dlaczego animujemy używając komputera? Dlaczego animujemy używając komputera? Wyciąg z minimum programowego fizyki w liceum... Kinematyka
Stochastyczna dynamika z opóźnieniem czasowym w grach ewolucyjnych oraz modelach ekspresji i regulacji genów
 Stochastyczna dynamika z opóźnieniem czasowym w grach ewolucyjnych oraz modelach ekspresji i regulacji genów Jacek Miękisz Instytut Matematyki Stosowanej i Mechaniki Uniwersytet Warszawski Warszawa 14
Stochastyczna dynamika z opóźnieniem czasowym w grach ewolucyjnych oraz modelach ekspresji i regulacji genów Jacek Miękisz Instytut Matematyki Stosowanej i Mechaniki Uniwersytet Warszawski Warszawa 14
Algorytm Genetyczny. zastosowanie do procesów rozmieszczenia stacji raportujących w sieciach komórkowych
 Algorytm Genetyczny zastosowanie do procesów rozmieszczenia stacji raportujących w sieciach komórkowych Dlaczego Algorytmy Inspirowane Naturą? Rozwój nowych technologii: złożone problemy obliczeniowe w
Algorytm Genetyczny zastosowanie do procesów rozmieszczenia stacji raportujących w sieciach komórkowych Dlaczego Algorytmy Inspirowane Naturą? Rozwój nowych technologii: złożone problemy obliczeniowe w
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
Algorytmy ewolucyjne `
 Algorytmy ewolucyjne ` Wstęp Czym są algorytmy ewolucyjne? Rodzaje algorytmów ewolucyjnych Algorytmy genetyczne Strategie ewolucyjne Programowanie genetyczne Zarys historyczny Alan Turing, 1950 Nils Aall
Algorytmy ewolucyjne ` Wstęp Czym są algorytmy ewolucyjne? Rodzaje algorytmów ewolucyjnych Algorytmy genetyczne Strategie ewolucyjne Programowanie genetyczne Zarys historyczny Alan Turing, 1950 Nils Aall
Spacery losowe generowanie realizacji procesu losowego
 Spacery losowe generowanie realizacji procesu losowego Michał Krzemiński Streszczenie Omówimy metodę generowania trajektorii spacerów losowych (błądzenia losowego), tj. szczególnych procesów Markowa z
Spacery losowe generowanie realizacji procesu losowego Michał Krzemiński Streszczenie Omówimy metodę generowania trajektorii spacerów losowych (błądzenia losowego), tj. szczególnych procesów Markowa z
Modelowanie i Animacja
 Modelowanie i Animacja Maciej Matyka maq@panoramix.ift.uni.wroc.pl Uniwersytet Wrocławski Animacje Komputerowe p. 1/29 Co to jest Animacja? Układ pojedynczych klatek Odtwarzanych w ustalonej kolejności
Modelowanie i Animacja Maciej Matyka maq@panoramix.ift.uni.wroc.pl Uniwersytet Wrocławski Animacje Komputerowe p. 1/29 Co to jest Animacja? Układ pojedynczych klatek Odtwarzanych w ustalonej kolejności
Algorytmy ewolucyjne - algorytmy genetyczne. I. Karcz-Dulęba
 Algorytmy ewolucyjne - algorytmy genetyczne I. Karcz-Dulęba Algorytmy klasyczne a algorytmy ewolucyjne Przeszukiwanie przestrzeni przez jeden punkt bazowy Przeszukiwanie przestrzeni przez zbiór punktów
Algorytmy ewolucyjne - algorytmy genetyczne I. Karcz-Dulęba Algorytmy klasyczne a algorytmy ewolucyjne Przeszukiwanie przestrzeni przez jeden punkt bazowy Przeszukiwanie przestrzeni przez zbiór punktów
RENDERING W CZASIE RZECZYWISTYM. Michał Radziszewski
 RENDERING W CZASIE RZECZYWISTYM Michał Radziszewski Plan wykładu Mapowanie nierówności wprowadzenie Poziomy szczegółowości Cieniowanie w układzie stycznym Generacja wektorów normalnych i stycznych Mapy
RENDERING W CZASIE RZECZYWISTYM Michał Radziszewski Plan wykładu Mapowanie nierówności wprowadzenie Poziomy szczegółowości Cieniowanie w układzie stycznym Generacja wektorów normalnych i stycznych Mapy
ALGORYTMY GENETYCZNE (wykład + ćwiczenia)
") ALGORYTMY GENETYCZNE (wykład + ćwiczenia) Prof. dr hab. Krzysztof Dems Treści programowe: 1. Metody rozwiązywania problemów matematycznych i informatycznych.. Elementarny algorytm genetyczny: definicja
ALGORYTMY GENETYCZNE (wykład + ćwiczenia) Prof. dr hab. Krzysztof Dems Treści programowe: 1. Metody rozwiązywania problemów matematycznych i informatycznych.. Elementarny algorytm genetyczny: definicja
Algorytm genetyczny (genetic algorithm)-
-") Optymalizacja W praktyce inżynierskiej często zachodzi potrzeba znalezienia parametrów, dla których system/urządzenie będzie działać w sposób optymalny. Klasyczne podejście do optymalizacji: sformułowanie
Optymalizacja W praktyce inżynierskiej często zachodzi potrzeba znalezienia parametrów, dla których system/urządzenie będzie działać w sposób optymalny. Klasyczne podejście do optymalizacji: sformułowanie
MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych
 MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny rok akademicki
MODELOWANIE ZA POMOCĄ MES Analiza statyczna ustrojów powierzchniowych PODSTAWY KOMPUTEROWEGO MODELOWANIA USTROJÓW POWIERZCHNIOWYCH Budownictwo, studia I stopnia, semestr VI przedmiot fakultatywny rok akademicki
Symulacje komputerowe
 Fizyka w modelowaniu i symulacjach komputerowych Jacek Matulewski (e-mail: jacek@fizyka.umk.pl) http://www.fizyka.umk.pl/~jacek/dydaktyka/modsym/ Symulacje komputerowe Dynamika bryły sztywnej Wersja: 8
Fizyka w modelowaniu i symulacjach komputerowych Jacek Matulewski (e-mail: jacek@fizyka.umk.pl) http://www.fizyka.umk.pl/~jacek/dydaktyka/modsym/ Symulacje komputerowe Dynamika bryły sztywnej Wersja: 8
Numeryczna algebra liniowa
 Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak podstawowe operacje na wektorach i macierzach, a także rozwiązywanie układów
Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak podstawowe operacje na wektorach i macierzach, a także rozwiązywanie układów
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
MODELOWANIE RZECZYWISTOŚCI
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
ALGORYTMY GENETYCZNE ćwiczenia
 ćwiczenia Wykorzystaj algorytmy genetyczne do wyznaczenia minimum globalnego funkcji testowej: 1. Wylosuj dwuwymiarową tablicę 100x2 liczb 8-bitowych z zakresu [-100; +100] reprezentujących inicjalną populację
ćwiczenia Wykorzystaj algorytmy genetyczne do wyznaczenia minimum globalnego funkcji testowej: 1. Wylosuj dwuwymiarową tablicę 100x2 liczb 8-bitowych z zakresu [-100; +100] reprezentujących inicjalną populację
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Transport, studia I stopnia rok akademicki 2011/2012 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Uwagi wstępne Układ liniowych równań algebraicznych można
Dokąd on zmierza? Przemieszczenie i prędkość jako wektory
 A: 1 OK Muszę to powtórzyć... Potrzebuję pomocy Dokąd on zmierza? Przemieszczenie i prędkość jako wektory Łódź żegluje po morzu... Płynie z szybkością 10 węzłów (węzeł to 1 mila morska na godzinę czyli
A: 1 OK Muszę to powtórzyć... Potrzebuję pomocy Dokąd on zmierza? Przemieszczenie i prędkość jako wektory Łódź żegluje po morzu... Płynie z szybkością 10 węzłów (węzeł to 1 mila morska na godzinę czyli
METODY NUMERYCZNE. wykład. konsultacje: wtorek 10:00-11:30 środa 10:00-11:30. dr inż. Grażyna Kałuża pokój
 METODY NUMERYCZNE wykład dr inż. Grażyna Kałuża pokój 103 konsultacje: wtorek 10:00-11:30 środa 10:00-11:30 www.kwmimkm.polsl.pl Program przedmiotu wykład: 15 godzin w semestrze laboratorium: 30 godzin
METODY NUMERYCZNE wykład dr inż. Grażyna Kałuża pokój 103 konsultacje: wtorek 10:00-11:30 środa 10:00-11:30 www.kwmimkm.polsl.pl Program przedmiotu wykład: 15 godzin w semestrze laboratorium: 30 godzin
Zadanie 5 - Algorytmy genetyczne (optymalizacja)
") Zadanie 5 - Algorytmy genetyczne (optymalizacja) Marcin Pietrzykowski mpietrzykowski@wi.zut.edu.pl wersja 1.0 1 Cel Celem zadania jest zapoznanie się z Algorytmami Genetycznymi w celu rozwiązywanie zadania
Zadanie 5 - Algorytmy genetyczne (optymalizacja) Marcin Pietrzykowski mpietrzykowski@wi.zut.edu.pl wersja 1.0 1 Cel Celem zadania jest zapoznanie się z Algorytmami Genetycznymi w celu rozwiązywanie zadania
Numeryczna algebra liniowa. Krzysztof Banaś Obliczenia Wysokiej Wydajności 1
 Numeryczna algebra liniowa Krzysztof Banaś Obliczenia Wysokiej Wydajności 1 Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak
Numeryczna algebra liniowa Krzysztof Banaś Obliczenia Wysokiej Wydajności 1 Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak
Mechanika Analityczna
 Mechanika Analityczna Wykład 2 - Zasada prac przygotowanych i ogólne równanie dynamiki Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej 29 lutego 2016 Plan wykładu
Mechanika Analityczna Wykład 2 - Zasada prac przygotowanych i ogólne równanie dynamiki Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej 29 lutego 2016 Plan wykładu
Modelowanie w projektowaniu maszyn i procesów cz.5
 Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Modelowanie w projektowaniu maszyn i procesów cz.5 Metoda Elementów Skończonych i analizy optymalizacyjne w środowisku CAD Dr hab inż. Piotr Pawełko p. 141 Piotr.Pawełko@zut.edu.pl www.piopawelko.zut.edu.pl
Metody Obliczeniowe w Nauce i Technice
 10. Numeryczna algebra liniowa wprowadzenie. Marian Bubak Department of Computer Science AGH University of Science and Technology Krakow, Poland bubak@agh.edu.pl dice.cyfronet.pl Contributors Magdalena
10. Numeryczna algebra liniowa wprowadzenie. Marian Bubak Department of Computer Science AGH University of Science and Technology Krakow, Poland bubak@agh.edu.pl dice.cyfronet.pl Contributors Magdalena
Elementy inteligencji obliczeniowej
 Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta
 Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
KADD Minimalizacja funkcji
 Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
Minimalizacja funkcji Poszukiwanie minimum funkcji Foma kwadratowa Metody przybliżania minimum minimalizacja Minimalizacja w n wymiarach Metody poszukiwania minimum Otaczanie minimum Podział obszaru zawierającego
OPIS PRZEDMIOTU/MODUŁU KSZTAŁCENIA (SYLABUS)
") Załącznik nr 2 do zarządzenia Nr 33/2012 z dnia 25 kwietnia 2012 r. OPIS PRZEDMIOTU/MODUŁU KSZTAŁCENIA (SYLABUS) 1. Nazwa przedmiotu/modułu w języku polskim Symulacje komputerowe dynamiki płynów 2. Nazwa
Załącznik nr 2 do zarządzenia Nr 33/2012 z dnia 25 kwietnia 2012 r. OPIS PRZEDMIOTU/MODUŁU KSZTAŁCENIA (SYLABUS) 1. Nazwa przedmiotu/modułu w języku polskim Symulacje komputerowe dynamiki płynów 2. Nazwa
IMPLIKACJE ZASTOSOWANIA KODOWANIA OPARTEGO NA LICZBACH CAŁKOWITYCH W ALGORYTMIE GENETYCZNYM
 IMPLIKACJE ZASTOSOWANIA KODOWANIA OPARTEGO NA LICZBACH CAŁKOWITYCH W ALGORYTMIE GENETYCZNYM Artykuł zawiera opis eksperymentu, który polegał na uyciu algorytmu genetycznego przy wykorzystaniu kodowania
IMPLIKACJE ZASTOSOWANIA KODOWANIA OPARTEGO NA LICZBACH CAŁKOWITYCH W ALGORYTMIE GENETYCZNYM Artykuł zawiera opis eksperymentu, który polegał na uyciu algorytmu genetycznego przy wykorzystaniu kodowania
Dobór parametrów algorytmu ewolucyjnego
 Dobór parametrów algorytmu ewolucyjnego 1 2 Wstęp Algorytm ewolucyjny posiada wiele parametrów. Przykładowo dla algorytmu genetycznego są to: prawdopodobieństwa stosowania operatorów mutacji i krzyżowania.
Dobór parametrów algorytmu ewolucyjnego 1 2 Wstęp Algorytm ewolucyjny posiada wiele parametrów. Przykładowo dla algorytmu genetycznego są to: prawdopodobieństwa stosowania operatorów mutacji i krzyżowania.
Metody przeszukiwania
 Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
Metody przeszukiwania Co to jest przeszukiwanie Przeszukiwanie polega na odnajdywaniu rozwiązania w dyskretnej przestrzeni rozwiązao. Zwykle przeszukiwanie polega na znalezieniu określonego rozwiązania
Odkrywanie algorytmów kwantowych za pomocą programowania genetycznego
 Odkrywanie algorytmów kwantowych za pomocą programowania genetycznego Piotr Rybak Koło naukowe fizyków Migacz, Uniwersytet Wrocławski Piotr Rybak (Migacz UWr) Odkrywanie algorytmów kwantowych 1 / 17 Spis
Odkrywanie algorytmów kwantowych za pomocą programowania genetycznego Piotr Rybak Koło naukowe fizyków Migacz, Uniwersytet Wrocławski Piotr Rybak (Migacz UWr) Odkrywanie algorytmów kwantowych 1 / 17 Spis
Spokrewnienie prawdopodobieństwo, że dwa losowe geny od dwóch osobników są genami IBD. IBD = identical by descent, geny identycznego pochodzenia
 prawdopodobieństwo, że dwa losowe geny od dwóch osobników są genami ID. Relationship Relatedness Kinship Fraternity ID = identical by descent, geny identycznego pochodzenia jest miarą względną. Przyjmuje
prawdopodobieństwo, że dwa losowe geny od dwóch osobników są genami ID. Relationship Relatedness Kinship Fraternity ID = identical by descent, geny identycznego pochodzenia jest miarą względną. Przyjmuje
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Obliczenia iteracyjne
 Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Lekcja Strona z Obliczenia iteracyjne Zmienne iteracyjne (wyliczeniowe) Obliczenia iteracyjne wymagają zdefiniowania specjalnej zmiennej nazywanej iteracyjną lub wyliczeniową. Zmienną iteracyjną od zwykłej
Program MC. Obliczyć radialną funkcję korelacji. Zrobić jej wykres. Odczytać z wykresu wartość radialnej funkcji korelacji w punkcie r=
 Program MC Napisać program symulujący twarde kule w zespole kanonicznym. Dla N > 100 twardych kul. Gęstość liczbowa 0.1 < N/V < 0.4. Zrobić obliczenia dla 2,3 różnych wartości gęstości. Obliczyć radialną
Program MC Napisać program symulujący twarde kule w zespole kanonicznym. Dla N > 100 twardych kul. Gęstość liczbowa 0.1 < N/V < 0.4. Zrobić obliczenia dla 2,3 różnych wartości gęstości. Obliczyć radialną
Wstęp do metod numerycznych Zadania numeryczne 2016/17 1
 Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
Politechnika Wrocławska, Wydział Informatyki i Zarządzania. Modelowanie
 Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
Politechnika Wrocławska, Wydział Informatyki i Zarządzania Modelowanie Zad Wyznacz transformaty Laplace a poniższych funkcji, korzystając z tabeli transformat: a) 8 3e 3t b) 4 sin 5t 2e 5t + 5 c) e5t e
6. Klasyczny algorytm genetyczny. 1
 6. Klasyczny algorytm genetyczny. 1 Idea algorytmu genetycznego została zaczerpnięta z nauk przyrodniczych opisujących zjawiska doboru naturalnego i dziedziczenia. Mechanizmy te polegają na przetrwaniu
6. Klasyczny algorytm genetyczny. 1 Idea algorytmu genetycznego została zaczerpnięta z nauk przyrodniczych opisujących zjawiska doboru naturalnego i dziedziczenia. Mechanizmy te polegają na przetrwaniu
Księgarnia PWN: David J. Griffiths - Podstawy elektrodynamiki
 Księgarnia PWN: David J. Griffiths - Podstawy elektrodynamiki Spis treści Przedmowa... 11 Wstęp: Czym jest elektrodynamika i jakie jest jej miejsce w fizyce?... 13 1. Analiza wektorowa... 19 1.1. Algebra
Księgarnia PWN: David J. Griffiths - Podstawy elektrodynamiki Spis treści Przedmowa... 11 Wstęp: Czym jest elektrodynamika i jakie jest jej miejsce w fizyce?... 13 1. Analiza wektorowa... 19 1.1. Algebra
SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO
 SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO. Rzeczywistość (istniejąca lub projektowana).. Model fizyczny. 3. Model matematyczny (optymalizacyjny): a. Zmienne projektowania
SCHEMAT ROZWIĄZANIA ZADANIA OPTYMALIZACJI PRZY POMOCY ALGORYTMU GENETYCZNEGO. Rzeczywistość (istniejąca lub projektowana).. Model fizyczny. 3. Model matematyczny (optymalizacyjny): a. Zmienne projektowania
ANALIZA KINEMATYCZNA PALCÓW RĘKI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, Spis treści
 Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Procesy Markowa zawdzięczają swoją nazwę ich twórcy Andriejowi Markowowi, który po raz pierwszy opisał problem w 1906 roku.
 Procesy Markowa zawdzięczają swoją nazwę ich twórcy Andriejowi Markowowi, który po raz pierwszy opisał problem w 1906 roku. Uogólnienie na przeliczalnie nieskończone przestrzenie stanów zostało opracowane
Procesy Markowa zawdzięczają swoją nazwę ich twórcy Andriejowi Markowowi, który po raz pierwszy opisał problem w 1906 roku. Uogólnienie na przeliczalnie nieskończone przestrzenie stanów zostało opracowane
WYKŁAD 8 RÓWNANIE NAVIERA-STOKESA 1/17
 WYKŁAD 8 RÓWNANIE NAVIERA-STOKESA /7 Zaczniemy od wyprowadzenia równania ruchu dla płynu newtonowskiego. Wcześniej wyprowadziliśmy z -ej Zasady Dynamiki ogólne równanie ruchu, którego postać indeksowa
WYKŁAD 8 RÓWNANIE NAVIERA-STOKESA /7 Zaczniemy od wyprowadzenia równania ruchu dla płynu newtonowskiego. Wcześniej wyprowadziliśmy z -ej Zasady Dynamiki ogólne równanie ruchu, którego postać indeksowa
Matematyka Stosowana na Politechnice Wrocławskiej. Komitet Matematyki PAN, luty 2017 r.
 Matematyka Stosowana na Politechnice Wrocławskiej Komitet Matematyki PAN, luty 2017 r. Historia kierunku Matematyka Stosowana utworzona w 2012 r. na WPPT (zespół z Centrum im. Hugona Steinhausa) studia
Matematyka Stosowana na Politechnice Wrocławskiej Komitet Matematyki PAN, luty 2017 r. Historia kierunku Matematyka Stosowana utworzona w 2012 r. na WPPT (zespół z Centrum im. Hugona Steinhausa) studia
Strategie ewolucyjne. Gnypowicz Damian Staniszczak Łukasz Woźniak Marek
 Strategie ewolucyjne Gnypowicz Damian Staniszczak Łukasz Woźniak Marek Strategie ewolucyjne, a algorytmy genetyczne Podobieństwa: Oba działają na populacjach rozwiązań Korzystają z zasad selecji i przetwarzania
Strategie ewolucyjne Gnypowicz Damian Staniszczak Łukasz Woźniak Marek Strategie ewolucyjne, a algorytmy genetyczne Podobieństwa: Oba działają na populacjach rozwiązań Korzystają z zasad selecji i przetwarzania
Automatyczny dobór parametrów algorytmu genetycznego
 Automatyczny dobór parametrów algorytmu genetycznego Remigiusz Modrzejewski 22 grudnia 2008 Plan prezentacji Wstęp Atrakcyjność Pułapki Klasyfikacja Wstęp Atrakcyjność Pułapki Klasyfikacja Konstrukcja
Automatyczny dobór parametrów algorytmu genetycznego Remigiusz Modrzejewski 22 grudnia 2008 Plan prezentacji Wstęp Atrakcyjność Pułapki Klasyfikacja Wstęp Atrakcyjność Pułapki Klasyfikacja Konstrukcja
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Zał nr 4 do ZW. Dla grupy kursów zaznaczyć kurs końcowy. Liczba punktów ECTS charakterze praktycznym (P)
") Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładów Błędy obliczeń Błędy można podzielić na: modelu, metody, wejściowe (początkowe), obcięcia, zaokrągleń..
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładów Błędy obliczeń Błędy można podzielić na: modelu, metody, wejściowe (początkowe), obcięcia, zaokrągleń..
Zasady dynamiki Newtona. Ilość ruchu, stan ruchu danego ciała opisuje pęd
 Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Siły - wektory Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub
Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Siły - wektory Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub
Obliczenia Naukowe. Wykład 12: Zagadnienia na egzamin. Bartek Wilczyński
 Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ
 POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 75 Electrical Engineering 2013 Łukasz NIEWIARA* Krzysztof ZAWIRSKI* AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ Zagadnienia
POZNAN UNIVE RSITY OF TE CHNOLOGY ACADE MIC JOURNALS No 75 Electrical Engineering 2013 Łukasz NIEWIARA* Krzysztof ZAWIRSKI* AUTO-STROJENIE REGULATORA TYPU PID Z WYKORZYSTANIEM LOGIKI ROZMYTEJ Zagadnienia
Elementy modelowania matematycznego
 Elementy modelowania matematycznego Łańcuchy Markowa: zagadnienia graniczne. Ukryte modele Markowa. Jakub Wróblewski jakubw@pjwstk.edu.pl http://zajecia.jakubw.pl/ KLASYFIKACJA STANÓW Stan i jest osiągalny
Elementy modelowania matematycznego Łańcuchy Markowa: zagadnienia graniczne. Ukryte modele Markowa. Jakub Wróblewski jakubw@pjwstk.edu.pl http://zajecia.jakubw.pl/ KLASYFIKACJA STANÓW Stan i jest osiągalny
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium Zadanie nr 3 Osada autor: A Gonczarek Celem poniższego zadania jest zrealizowanie fragmentu komputerowego przeciwnika w grze strategiczno-ekonomicznej
Metody systemowe i decyzyjne w informatyce Laboratorium Zadanie nr 3 Osada autor: A Gonczarek Celem poniższego zadania jest zrealizowanie fragmentu komputerowego przeciwnika w grze strategiczno-ekonomicznej
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Równoważność algorytmów optymalizacji
 Równoważność algorytmów optymalizacji Reguła nie ma nic za darmo (ang. no free lunch theory): efektywność różnych typowych algorytmów szukania uśredniona po wszystkich możliwych problemach optymalizacyjnych
Równoważność algorytmów optymalizacji Reguła nie ma nic za darmo (ang. no free lunch theory): efektywność różnych typowych algorytmów szukania uśredniona po wszystkich możliwych problemach optymalizacyjnych
Egzamin z Metod Numerycznych ZSI, Egzamin, Gr. A
 Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Algorytmy genetyczne
 9 listopada 2010 y ewolucyjne - zbiór metod optymalizacji inspirowanych analogiami biologicznymi (ewolucja naturalna). Pojęcia odwzorowujące naturalne zjawiska: Osobnik Populacja Genotyp Fenotyp Gen Chromosom
9 listopada 2010 y ewolucyjne - zbiór metod optymalizacji inspirowanych analogiami biologicznymi (ewolucja naturalna). Pojęcia odwzorowujące naturalne zjawiska: Osobnik Populacja Genotyp Fenotyp Gen Chromosom
Sposoby tworzenia uwarunkowania wstępnego dla metody gradientów sprzężonych
 Sposoby tworzenia uwarunkowania wstępnego dla metody gradientów sprzężonych Ten fakt, że matematyka obliczeniowa nie daje żadnych przepisów dla tworzenia operatora uwarunkowania wstępnego B, doprowadzi
Sposoby tworzenia uwarunkowania wstępnego dla metody gradientów sprzężonych Ten fakt, że matematyka obliczeniowa nie daje żadnych przepisów dla tworzenia operatora uwarunkowania wstępnego B, doprowadzi
c - częstość narodzin drapieżników lub współczynnik przyrostu drapieżników,
 SIMULINK 3 Zawartość Równanie Lotki-Volterry dwa słowa wstępu... 1 Potrzebne elementy... 2 Kosmetyka 1... 3 Łączenie elementów... 3 Kosmetyka 2... 6 Symulacja... 8 Do pobrania... 10 Równanie Lotki-Volterry
SIMULINK 3 Zawartość Równanie Lotki-Volterry dwa słowa wstępu... 1 Potrzebne elementy... 2 Kosmetyka 1... 3 Łączenie elementów... 3 Kosmetyka 2... 6 Symulacja... 8 Do pobrania... 10 Równanie Lotki-Volterry
Podstawy elektrodynamiki / David J. Griffiths. - wyd. 2, dodr. 3. Warszawa, 2011 Spis treści. Przedmowa 11
 Podstawy elektrodynamiki / David J. Griffiths. - wyd. 2, dodr. 3. Warszawa, 2011 Spis treści Przedmowa 11 Wstęp: Czym jest elektrodynamika i jakie jest jej miejsce w fizyce? 13 1. Analiza wektorowa 19
Podstawy elektrodynamiki / David J. Griffiths. - wyd. 2, dodr. 3. Warszawa, 2011 Spis treści Przedmowa 11 Wstęp: Czym jest elektrodynamika i jakie jest jej miejsce w fizyce? 13 1. Analiza wektorowa 19
1. Symulacje komputerowe Idea symulacji Przykład. 2. Metody próbkowania Jackknife Bootstrap. 3. Łańcuchy Markova. 4. Próbkowanie Gibbsa
 BIOINFORMATYKA 1. Wykład wstępny 2. Bazy danych: projektowanie i struktura 3. Równowaga Hardyego-Weinberga, wsp. rekombinacji 4. Analiza asocjacyjna 5. Analiza asocjacyjna 6. Sekwencjonowanie nowej generacji
BIOINFORMATYKA 1. Wykład wstępny 2. Bazy danych: projektowanie i struktura 3. Równowaga Hardyego-Weinberga, wsp. rekombinacji 4. Analiza asocjacyjna 5. Analiza asocjacyjna 6. Sekwencjonowanie nowej generacji
9. PODSTAWY TEORII PLASTYCZNOŚCI
 9. PODSTAWY TEORII PLASTYCZNOŚCI 1 9. 9. PODSTAWY TEORII PLASTYCZNOŚCI 9.1. Pierwsze kroki Do tej pory zajmowaliśmy się w analizie ciał i konstrukcji tylko analizą sprężystą. Nie zastanawialiśmy się, co
9. PODSTAWY TEORII PLASTYCZNOŚCI 1 9. 9. PODSTAWY TEORII PLASTYCZNOŚCI 9.1. Pierwsze kroki Do tej pory zajmowaliśmy się w analizie ciał i konstrukcji tylko analizą sprężystą. Nie zastanawialiśmy się, co
Podręcznik. Przykład 1: Wyborcy
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 5892 424 http://www.neuroinf.pl/members/danek/swps/ Iwo Białynicki-Birula Iwona Białynicka-Birula
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 5892 424 http://www.neuroinf.pl/members/danek/swps/ Iwo Białynicki-Birula Iwona Białynicka-Birula
Szacowanie wartości hodowlanej. Zarządzanie populacjami
 Szacowanie wartości hodowlanej Zarządzanie populacjami wartość hodowlana = wartość cechy? Tak! Przy h 2 =1 ? wybitny ojciec = wybitne dzieci Tak, gdy cecha wysokoodziedziczalna. Wartość hodowlana genetycznie
Szacowanie wartości hodowlanej Zarządzanie populacjami wartość hodowlana = wartość cechy? Tak! Przy h 2 =1 ? wybitny ojciec = wybitne dzieci Tak, gdy cecha wysokoodziedziczalna. Wartość hodowlana genetycznie
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Wstęp do metod numerycznych 11. Minimalizacja: funkcje wielu zmiennych. P. F. Góra
 Wstęp do metod numerycznych 11. Minimalizacja: funkcje wielu zmiennych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Strategia minimalizacji wielowymiarowej Zakładamy, że metody poszukiwania minimów
Wstęp do metod numerycznych 11. Minimalizacja: funkcje wielu zmiennych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Strategia minimalizacji wielowymiarowej Zakładamy, że metody poszukiwania minimów
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Transformaty. Kodowanie transformujace
 Transformaty. Kodowanie transformujace Kodowanie i kompresja informacji - Wykład 10 10 maja 2009 Szeregi Fouriera Każda funkcję okresowa f (t) o okresie T można zapisać jako f (t) = a 0 + a n cos nω 0
Transformaty. Kodowanie transformujace Kodowanie i kompresja informacji - Wykład 10 10 maja 2009 Szeregi Fouriera Każda funkcję okresowa f (t) o okresie T można zapisać jako f (t) = a 0 + a n cos nω 0
Algorytmy ewolucyjne. wprowadzenie
 Algorytmy ewolucyjne wprowadzenie Gracjan Wilczewski, www.mat.uni.torun.pl/~gracjan Toruń, 2005 Historia Podstawowy algorytm genetyczny został wprowadzony przez Johna Hollanda (Uniwersytet Michigan) i
Algorytmy ewolucyjne wprowadzenie Gracjan Wilczewski, www.mat.uni.torun.pl/~gracjan Toruń, 2005 Historia Podstawowy algorytm genetyczny został wprowadzony przez Johna Hollanda (Uniwersytet Michigan) i
INSTRUKCJA DO ĆWICZENIA NR 4
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
Metody numeryczne. dr hab inż. Tomasz Chwiej. Syllabus:
 Metody numeryczne dr hab inż. Tomasz Chwiej Syllabus: https://syllabuskrk.agh.edu.pl/pl Plan wykładu 1. Arytmetyka komputerowa, błędy numeryczne 2. Rozwiązywanie układów algebraicznych równań liniowych
Metody numeryczne dr hab inż. Tomasz Chwiej Syllabus: https://syllabuskrk.agh.edu.pl/pl Plan wykładu 1. Arytmetyka komputerowa, błędy numeryczne 2. Rozwiązywanie układów algebraicznych równań liniowych
Zasady dynamiki Newtona. Ilość ruchu, stan ruchu danego ciała opisuje pęd
 Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Paweł Kłosowski Andrzej Ambroziak METODY NUMERYCZNE W MECHANICE KONSTRUKCJI Z PRZYKŁADAMI W PROGRAMIE
 Paweł Kłosowski Andrzej Ambroziak METODY NUMERYCZNE W MECHANICE KONSTRUKCJI Z PRZYKŁADAMI W PROGRAMIE GDAŃSK 2011 PRZEWODNICZ CY KOMITETU REDAKCYJNEGO WYDAWNICTWA POLITECHNIKI GDA SKIEJ Romuald Szymkiewicz
Paweł Kłosowski Andrzej Ambroziak METODY NUMERYCZNE W MECHANICE KONSTRUKCJI Z PRZYKŁADAMI W PROGRAMIE GDAŃSK 2011 PRZEWODNICZ CY KOMITETU REDAKCYJNEGO WYDAWNICTWA POLITECHNIKI GDA SKIEJ Romuald Szymkiewicz
Algorytmy ewolucyjne NAZEWNICTWO
 Algorytmy ewolucyjne http://zajecia.jakubw.pl/nai NAZEWNICTWO Algorytmy ewolucyjne nazwa ogólna, obejmująca metody szczegółowe, jak np.: algorytmy genetyczne programowanie genetyczne strategie ewolucyjne
Algorytmy ewolucyjne http://zajecia.jakubw.pl/nai NAZEWNICTWO Algorytmy ewolucyjne nazwa ogólna, obejmująca metody szczegółowe, jak np.: algorytmy genetyczne programowanie genetyczne strategie ewolucyjne
Sylabus modułu: Matematyczne podstawy informatyki (kod modułu:03-mo2n-12-mpln)
") Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia II stopnia, rok 1 Sylabus modułu: Matematyczne podstawy informatyki (kod modułu:03-mo2n-12-mpln) 1. Informacje ogólne
Uniwersytet Śląski w Katowicach str. 1 Kierunek i poziom studiów: Matematyka, studia II stopnia, rok 1 Sylabus modułu: Matematyczne podstawy informatyki (kod modułu:03-mo2n-12-mpln) 1. Informacje ogólne
Tadeusz SZKODNY. POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH
 POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 Tadeusz SZKODNY SUB Gottingen 217 780 474 2005 A 3014 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH GLIWICE 2004 SPIS TREŚCI WAŻNIEJSZE OZNACZENIA
POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 Tadeusz SZKODNY SUB Gottingen 217 780 474 2005 A 3014 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH GLIWICE 2004 SPIS TREŚCI WAŻNIEJSZE OZNACZENIA
Zmienność. środa, 23 listopada 11
 Zmienność http://ggoralski.com Zmienność Zmienność - rodzaje Zmienność obserwuje się zarówno między poszczególnymi osobnikami jak i między populacjami. Różnice te mogą mieć jednak różne podłoże. Mogą one
Zmienność http://ggoralski.com Zmienność Zmienność - rodzaje Zmienność obserwuje się zarówno między poszczególnymi osobnikami jak i między populacjami. Różnice te mogą mieć jednak różne podłoże. Mogą one
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH
 POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
POLITECHNIKA GDAŃSKA KRZYSZTOF LIPIŃSKI UKŁADY WIELOCZŁONOWE Z WIĘZAMI JEDNOSTRONNYMI W ZASTOSOWANIU DO MODELOWANIA ZŁOŻONYCH UKŁADÓW MECHANICZNYCH GDAŃSK 2012 PRZEWODNICZĄCY KOMITETU REDAKCYJNEGO WYDAWNICTWA
Wykład z Technologii Informacyjnych. Piotr Mika
 Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Wykład z Technologii Informacyjnych Piotr Mika Uniwersalna forma graficznego zapisu algorytmów Schemat blokowy zbiór bloków, powiązanych ze sobą liniami zorientowanymi. Jest to rodzaj grafu, którego węzły
Modelowanie rynków finansowych z wykorzystaniem pakietu R
 Modelowanie rynków finansowych z wykorzystaniem pakietu R Metody numeryczne i symulacje stochastyczne Mateusz Topolewski woland@mat.umk.pl Wydział Matematyki i Informatyki UMK Plan działania 1 Całkowanie
Modelowanie rynków finansowych z wykorzystaniem pakietu R Metody numeryczne i symulacje stochastyczne Mateusz Topolewski woland@mat.umk.pl Wydział Matematyki i Informatyki UMK Plan działania 1 Całkowanie
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova
 Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 207/208
Wykaz oznaczeń Przedmowa... 9
 Spis treści Wykaz oznaczeń... 6 Przedmowa... 9 1 WPROWADZENIE... 11 1.1 Mechanika newtonowska... 14 1.2 Mechanika lagranżowska... 19 1.3 Mechanika hamiltonowska... 20 2 WIĘZY I ICH KLASYFIKACJA... 23 2.1
Spis treści Wykaz oznaczeń... 6 Przedmowa... 9 1 WPROWADZENIE... 11 1.1 Mechanika newtonowska... 14 1.2 Mechanika lagranżowska... 19 1.3 Mechanika hamiltonowska... 20 2 WIĘZY I ICH KLASYFIKACJA... 23 2.1