MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
|
|
|
- Agata Bednarska
- 7 lat temu
- Przeglądów:
Transkrypt

1 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
2 sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R. (Roboty Universalna Rossuma) 1922
3 Prawa robotów : Isaac Asimov w roku 1942 stworzył trzy prawa robotów i przedstawił je w fantastycznym opowiadaniu Zabawa w berka (Runaround). 1. Robot nie może skrzywdzić człowieka, ani przez zaniechanie działania dopuścić, aby człowiek doznał krzywdy. 2. Robot musi być posłuszny rozkazom człowieka, chyba że stoją one w sprzeczności z Pierwszym Prawem. 3. Robot musi chronić sam siebie, jeśli tylko nie stoi to w sprzeczności z Pierwszym lub Drugim Prawem.
 servo")
4 Ewolucja MANIPULATOR KOPIUJĄCY -małe siły (napędza operator), - małe odległości (długi łańcuch kinemat błędy) servo computer
5 Ewolucja operator steruje za pomocą przycisków (brak czucia ) servo computer
6 Ewolucja Serwonapędy operator czuje siłę servo computer
7 Ewolucja servo computer Robot współczesny
8 ZASTOSOWANIA: PRACA W SRODOWISKU NIEBEZPIECZNYM: PROMIENIOWANIE, SKAŻENIE ZAGROŻENIE EKSPLOZJĄ WYSOKIE CIŚNIENIE GŁĘBIA UCIĄŻLIWE I POWTARZALNE OPERACJE TECHNOLOGICZNE MONTAZOWE, SPAWALNICZE, OBRÓBCZE,... MEDYCYNA, OCHRONA ZDROWIA REHABILITACJA ZABIEGI OPERACYJNE OPIEKA NAD NIEPEŁNOSPRAWNYMI INNE
9 Producenci: ABB KUKA Panasonic Motoman Mitsubishi FANUC




10 Roboty przemysłowe







11 Roboty mobilne


12 Manipulator do inspekcji mostów i wiaduktów
13 Roboty - obrabiarki

14 Manipulator medyczne i rehabilitacyjne
15 Struktura RUCHY LOKALNE EFEKTOR RUCHY REGIONALNE Robot przemysłowy LOKOMOCJA KORPUS
16 CZUJNIKI JEDN. STERUJ. NAPĘDY MANIP. EFEKTOR OTOCZ. CZUJNIKI układy mechaniczne
17 Ogólny schemat strukturalny manipulatora:
18 Rozwiązania możliwe układ 3D uniwersalny:,, orientacja efektora (3 st. swobody) x,y,z pozycja efektora (3 st. swobody) Wymagana ruchliwość: W = (+ 1 na chwyt) W= 6 (+1 na chwyt) 2 < W < 20
19 Manipulatory specjalne W > 6
20 Manipulatory przemysłowe: szeregowe oraz równoległe O strukturze otwartych łańcuchów kinematycznych O strukturze zamkniętych łańcuchów kinematycznych
21 Manipulator W=3 schematy strukturalne Założenia: Schemat ogólny, tylko pary 1 klasy (p 2,3,4,5 =0) : R i/lub T W = 6(n-1) - 5p 1 W = 3 n = 4 p 1 = 3 B C A T T T R T R R R B C T T T R R R R R R T T T T R R T A 3T 2TR T2R 3R TRT R2T RTR 2RT
22 3T
23 2TR
24 TRT
25 R2T
26 2RT
27 RTR
28 T2R
29 3R
30 Podstawowe schematy 3D TTT
31 Podstawowe schematy 3D RTT RRT

32 Podstawowe schematy 3D SCARA RRR
33 Przykłady struktur manipulatorów (rozwiązania komercyjne)

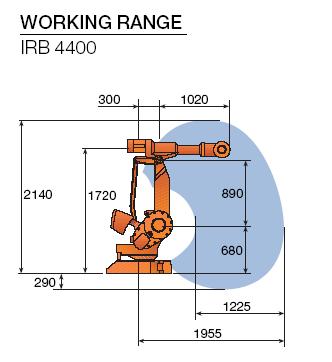
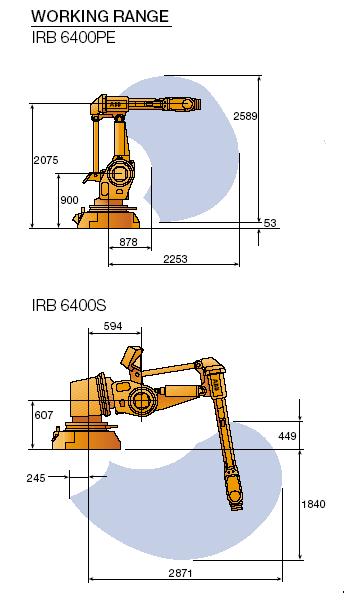
34 Manipulatory - udźwig
35 SRTEFA ROBOCZA

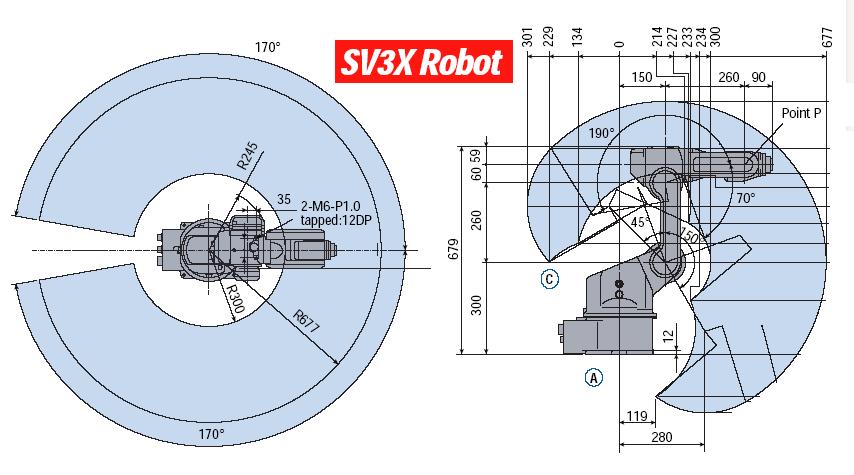
36 ABB IRB 140
37
38 ABB IRB 340
39 ABB IRB 940

40
41 Motoman

42
43 Kąt i współczynnik serwisu

44 Kąt i współczynnik serwisu kąt serwisu: C współczynnik serwisu k: k C 2 F F K 0 k 1
45 k = 1
46 k = 1 k = 0
 - 2p 1 - p 2 M = 0 M = 1")
47 Manewrowość (redundancja) n = 4 p 1 = 3 p 2 = 0 W = 3(n-1) - 2p 1 - p 2 W = 3 W = 4 n = 5 p 1 = 4 p 2 = 0 M = 3(n-1-1) - 2p 1 - p 2 M = 0 M = 1
48 Manewrowość (redundancja)
49 Efektory (chwytaki) - schematy
50
51
52
53
54 Efektory (chwytaki) - rozwiązania
")
55 Efektory (chwytaki) trzy palce
56
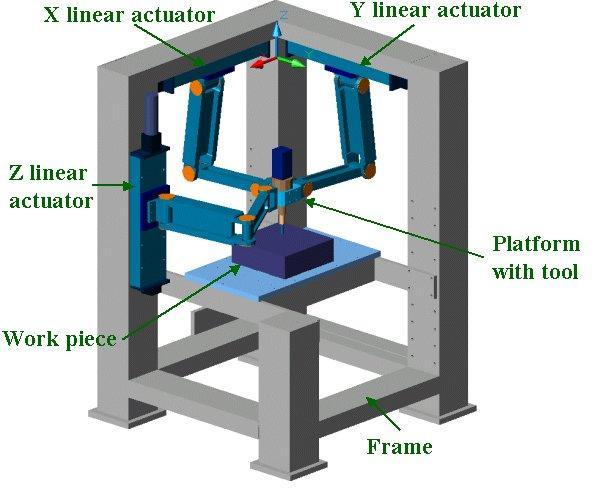
57 Manipulatory równoległe Manipulatorami równoległymi nazywa się układy, w których człon bierny (efektor, chwytak) jest połączony z podstawą kilkoma niezależnymi łańcuchami kinematycznymi.
58 Ogólny schemat manipulatora równoległego
59 Manipulatory równoległe Zastosowania Wyspecjalizowane obrabiarki ABB IRB 940 Tricept TMC 845

60 Manipulatory równoległe Zastosowania Manipulatory montażowe Manipulatory pakujące ABB IRB 340 FANUC M-1iA
61 Manipulatory równoległe Zastosowania Układy pozycjonujące Hexapod PI M-850 Pathfinders Hexvantage



62 Manipulatory równoległe Zastosowania Symulatory ruchu
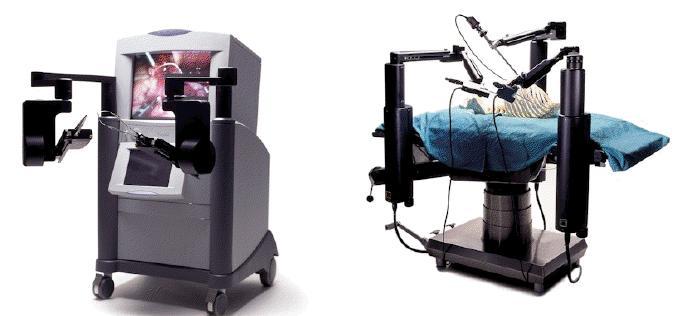
63 Manipulatory równoległe Zastosowania Medyczne i rehabilitacyjne Badawcze i rozwojowe Politechnika Wrocławska I-16MR 3R6C
64 Manipulatory równoległe Własności manipulatorów równoległych Duża sztywność układu Duża dokładność realizowanych ruchów Duża nośność
65 Manipulatory równoległe Własności manipulatorów równoległych Mała masa członów ruchomych. Platforma może poruszać się ze znacznymi prędkościami i przyspieszeniami. Napędy są umieszczone przy podstawie.
66 Manipulatory równoległe Własności manipulatorów równoległych Mała strefa robocza ABB IRB 340
67 Manipulatory równoległe Własności manipulatorów równoległych Mała strefa robocza ABB IRB 940 Tricept
68 Manipulatory równoległe Własności manipulatorów równoległych Mała strefa robocza FANUC F200
69 Manipulatory równoległe Własności manipulatorów równoległych Występowanie położeń osobliwych B1 12' 11 12'' C1 4 P C2 22' 21 C3 22'' 31 32'' A3 A1 O A2 C1 P C3 B1 12' C1 P C3 B3 B1 4 C2 B2 B '' 4 C2 A3 B2 A3 A1 O A2 A1 O A2

70 Hexapod PI M-850 Tricept TMC 845
71 Manipulatory równoległe Ogólne własności manipulatorów równoległych: - duża sztywność układu, - duża dokładność realizowanych ruchów, - duża nośność, - mała masa członów ruchomych, - platforma może poruszać się ze znacznymi prędkościami i przyspieszeniami, - napędy są umieszczone przy podstawie, - stosunkowo mała strefa robocza - występowanie położeń osobliwych członów, Zastosowanie: - wyspecjalizowane obrabiarki, - manipulatory montażowe, - manipulatory pakujące, - manipulatory pomiarowe, - układy pozycjonujące, - symulatory ruchu - inne.

72 Pathfinders Hexvantage ABB IRB 940
73 Politechnika Wrocławska I-16 MR 3R6C
74 ABB IRB 340

75 ABB IRB 940 Tricept
76 FANUC F200
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny uład przeznaczony do realizaci nietórych funci ręi ludzie. Manus (łacina) - ręa uład mechaniczny Karel Cape R.U.R. (Roboty
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny uład przeznaczony do realizaci nietórych funci ręi ludzie. Manus (łacina) - ręa uład mechaniczny Karel Cape R.U.R. (Roboty
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym
 Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Laboratorium z Napęd Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium z Napęd Robotów Robot precyzyjny typu SCARA Prowadzący: mgr inŝ. Waldemar Kanior Sala 101, budynek
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC
 T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
T13 Modelowanie zautomatyzowanych procesów wytwórczych, programowanie maszyn CNC 1. Wstęp Wg normy ISO ITR 8373, robot przemysłowy jest automatycznie sterowaną, programowalną, wielozadaniową maszyną manipulacyjną
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Tytuł prezentacji. Autorzy
 Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F
 ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
ROBOTY PRZEMYSŁOWE LABORATORIUM FANUC S-420F Wstęp Roboty przemysłowe FANUC Robotics przeznaczone są dla szerokiej gamy zastosowań, takich jak spawanie ( Spawanie to jedno z najczęstszych zastosowań robotów.
Roboty przemysłowe. Cz. II
 Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Roboty przemysłowe Cz. II Klasyfikacja robotów Ze względu na rodzaj napędu: - hydrauliczny (duże obciążenia) - pneumatyczny - elektryczny - mieszany Obecnie roboty przemysłowe bardzo często posiadają napędy
Mechanika Robotów. Wojciech Lisowski. 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej
 Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
Katedra Robotyki i Mechatroniki Akademia Górniczo-Hutnicza w Krakowie Mechanika Robotów Wojciech Lisowski 5 Planowanie trajektorii ruchu efektora w przestrzeni roboczej Mechanika Robotów KRiM, WIMIR, AGH
2.9. Kinematyka typowych struktur manipulatorów
 Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa
Politechnika Poznańska, Katedra Sterowania i Inżynierii Systemów str. 1 2.9. Kinematyka typowych struktur manipulatorów 2.9.1. Manipulator planarny 3DOF Notacja DH Rys. 28 Tablica 1 Parametry DH Nr ogniwa
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Roboty manipulacyjne (stacjonarne)
") Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Roboty manipulacyjne (stacjonarne) Podstawowe układy i zespoły Roboty przemysłowe składa się z następujących trzech podstawowych układów: zasilania, sterowania i ruchu. Układ zasilania Układ zasilania
Roboty manipulacyjne i mobilne. Roboty przemysłowe zadania i elementy
 Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
Roboty manipulacyjne i mobilne Wykład II zadania i elementy Janusz Jakubiak IIAiR Politechnika Wrocławska Informacja o prawach autorskich Materiały pochodzą z książek: J. Honczarenko.. Budowa i zastosowanie.
4. Chwytaki robotów przemysłowych Wstęp Metody doboru chwytaków robotów przemysłowych Zasady projektowania chwytaków robotów
 Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Ogłoszenie. Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz
 Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady
 Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH CATIA I MATLAB MODEL OF SERIAL MANIPULATOR IN CATIA AND MATLAB
 Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
MiA_cz.5. Czynniki techniczne rozwoju robotyki
 MiA_cz.5 Roboty przemysłowe i mobilne www.robotyka.com/teoria_spis.php 1 Czynniki techniczne rozwoju robotyki Rozwój technologii produkcyjnych i konstrukcyjnych, dzięki którym produkcja robotów stała się
MiA_cz.5 Roboty przemysłowe i mobilne www.robotyka.com/teoria_spis.php 1 Czynniki techniczne rozwoju robotyki Rozwój technologii produkcyjnych i konstrukcyjnych, dzięki którym produkcja robotów stała się
PROPOZYCJA INNOWACYJNEJ TECHNOLOGII. Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu
 PROPOZYCJA INNOWACYJNEJ TECHNOLOGII Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu 1. WSTĘP Przedmiotem wynalazku jest urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas
PROPOZYCJA INNOWACYJNEJ TECHNOLOGII Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu 1. WSTĘP Przedmiotem wynalazku jest urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
KATALOG SPRZEDAŻY 1. LASER IPG 6KW NUMER SERYJNY
 KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
(12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1
 OPIS PATENTOWY (19) PL (11) 174940 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
R O BO T YK A DL A M E C H A T R O NI K Ó W. Andrzej Rygałło
 R O BO T YK A DL A M E C H A T R O NI K Ó W Andrzej Rygałło Częstochowa 8 Spis treści WPROWADZENIE. Określenie robota jako maszyny. 4. Definicja robot. 9.3 Generacje robotów.....4 Klasyfikacja robotów...
R O BO T YK A DL A M E C H A T R O NI K Ó W Andrzej Rygałło Częstochowa 8 Spis treści WPROWADZENIE. Określenie robota jako maszyny. 4. Definicja robot. 9.3 Generacje robotów.....4 Klasyfikacja robotów...
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA, Kraków, PL BUP 10/05
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207396 (13) B1 (21) Numer zgłoszenia: 363254 (51) Int.Cl. F16C 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 03.11.2003
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 207396 (13) B1 (21) Numer zgłoszenia: 363254 (51) Int.Cl. F16C 11/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 03.11.2003
KATALOG SPRZEDAŻY 1. LASER IPG 6KW NUMER SERYJNY
 KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
KATALOG SPRZEDAŻY 1. LASER IPG 6KW MODEL LASERU YLS-6000-S4 NUMER SERYJNY 13103250 1 ZEWNĘTRZNE WYMIARY URZĄDZENIA 2 CHARAKTERYSTYKA OPTYCZNA OGÓLNA CHARAKTERYSTYKA WARUNKI 3 DODATKOWE INFORMACJE 4 2.
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Kiść robota. Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
 Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. kiści. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
15 grudnia 19 stycznia 11 luty -
 Jak to się zaczęło? 15 grudnia 2010 r. zaprasza nas Koło Naukowe Robotyki Cyborg++ (Wydział Mechatroniki PW), 19 stycznia 2011 r. - nawiązaliśmy kontakt z kołem naukowym Bionic na Wydziale Elektroniki
Jak to się zaczęło? 15 grudnia 2010 r. zaprasza nas Koło Naukowe Robotyki Cyborg++ (Wydział Mechatroniki PW), 19 stycznia 2011 r. - nawiązaliśmy kontakt z kołem naukowym Bionic na Wydziale Elektroniki
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Podstawy robotyki wykład III. Kinematyka manipulatora
 Podstawy robotyki Wykład III sztywnego Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Manipulator typu PUMA ogniwo 2 ogniwo 3 ogniwo 1 PUMA układy
Podstawy robotyki Wykład III sztywnego Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Manipulator typu PUMA ogniwo 2 ogniwo 3 ogniwo 1 PUMA układy
Lista projektów. Roboty Fanuc. VW Pamplona (SP)
") VW Pamplona (SP) Roboty Fanuc Programowanie robotów Fanuc. Optymalizacja czasu pracy linii. Standaryzacja programów. Aplikacje: zgrzewanie punktowe, nakładanie kleju. Cornaglia (PL) Robot Kuka KRC1 Diagnostyka
VW Pamplona (SP) Roboty Fanuc Programowanie robotów Fanuc. Optymalizacja czasu pracy linii. Standaryzacja programów. Aplikacje: zgrzewanie punktowe, nakładanie kleju. Cornaglia (PL) Robot Kuka KRC1 Diagnostyka
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia
 Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
Szczegółowy opis techniczny i wymagania w zakresie przedmiotu zamówienia Przedmiotem zamówienia jest dostawa współpracującego manipulatora przemysłowego o 6 stopniach swobody i udźwigu nominalnym 5kg wraz
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PODSTAWY ROBOTYKI 2. Kod przedmiotu: Sr 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PODSTAWY ROBOTYKI 2. Kod przedmiotu: Sr 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady
 Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Roboty przemysłowe - wybrane pojęcia, budowa, zastosowania, przykłady dr inż. Wojciech Muszyński Zakład Podstaw Cybernetyki i Robotyki wojciech.muszynski@pwr.wroc.pl Mechanizacja, Automatyzacja, Robotyzacja
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
Kinematyka manipulatorów robotów
 Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
Wstęp do Robotyki c W. Szynkiewicz, 29 1 Podstawowe pojęcia: Kinematyka manipulatorów robotów Ogniwo(człon, ramię) bryła sztywna(zbiór punktów materialnych, których wzajemne położenie jest stałe). Przegub(złącze)
Laboratorium Sterowania Robotów Sprawozdanie
 Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
CENTRUM KSZTAŁCENIA PRAKTYCZNEGO
 CENTRUM KSZTAŁCENIA PRAKTYCZNEGO PODSTAWY ROBOTYKI Roboty przemysłowe - wprowadzenie Sławomir Siewruk 2003 r. Spis Treści I. Wstęp. II. Podstawowe klasy robotów przemysłowych. III. Podstawowe elementy
CENTRUM KSZTAŁCENIA PRAKTYCZNEGO PODSTAWY ROBOTYKI Roboty przemysłowe - wprowadzenie Sławomir Siewruk 2003 r. Spis Treści I. Wstęp. II. Podstawowe klasy robotów przemysłowych. III. Podstawowe elementy
NOWOCZESNE WYKORZYSTANIE ROBOTYKI
 NOWOCZESNE WYKORZYSTANIE ROBOTYKI dr inż. Piotr Sauer Katedra Sterowania i Inżynierii Systemów dr inż. Piotr Sauer Politechnika Poznaoska, Wydział Informatyki, i ich zastosowao w przemyśle Katedra Sterowania
NOWOCZESNE WYKORZYSTANIE ROBOTYKI dr inż. Piotr Sauer Katedra Sterowania i Inżynierii Systemów dr inż. Piotr Sauer Politechnika Poznaoska, Wydział Informatyki, i ich zastosowao w przemyśle Katedra Sterowania
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
PL 213839 B1. Manipulator równoległy trójramienny o zamkniętym łańcuchu kinematycznym typu Delta, o trzech stopniach swobody
 PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 213839 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213839 (13) B1 (21) Numer zgłoszenia: 394237 (51) Int.Cl. B25J 18/04 (2006.01) B25J 9/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010
 Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010 Wstęp 1. Rozwój robotyki 1.1. Rys historyczny rozwoju robotyki 1.2. Dane statystyczne ilustrujące rozwój robotyki przemysłowej
Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010 Wstęp 1. Rozwój robotyki 1.1. Rys historyczny rozwoju robotyki 1.2. Dane statystyczne ilustrujące rozwój robotyki przemysłowej
AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. 1. PMiSM-2017
 AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki PMiSM-207 PODSTAWY
AiR. Podstawy modelowania i syntezy mechanizmów. Ćwiczenie laboratoryjne nr 2 str. Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki PMiSM-207 PODSTAWY
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach. Krzysztof Żurek Gdańsk,
 Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Podstawy automatyki i robotyki
 Podstawy automatyki i robotyki Dr inż. Wojciech Muszyński - opiekun przedmiotu Dr inż. Paweł Wachel Dr inż. Zbigniew Zajda Dr inż. Krzysztof Halawa Warunki zaliczenia Kolokwium pisemne w formie testu wyboru
Podstawy automatyki i robotyki Dr inż. Wojciech Muszyński - opiekun przedmiotu Dr inż. Paweł Wachel Dr inż. Zbigniew Zajda Dr inż. Krzysztof Halawa Warunki zaliczenia Kolokwium pisemne w formie testu wyboru
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
EiT_S_I_RwM_EM Robotyka w medycynie Robotics in Medicine
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
ANALIZA KINEMATYCZNA PALCÓW RĘKI
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 40, s. 111-116, Gliwice 2010 ANALIZA KINEMATYCZNA PALCÓW RĘKI ANTONI JOHN, AGNIESZKA MUSIOLIK Katedra Wytrzymałości Materiałów i Metod Komputerowych Mechaniki, Politechnika
PL B1. Układ do monitorowania stateczności wywrotnej maszyny mobilnej, w szczególności na podwoziu gąsienicowym
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230153 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 422372 (22) Data zgłoszenia: 27.07.2017 (51) Int.Cl. B60R 21/013 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230153 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 422372 (22) Data zgłoszenia: 27.07.2017 (51) Int.Cl. B60R 21/013 (2006.01)
Wykład 4 Zastosowanie robotyki w chirurgii
 Zastosowanie Robotyki w Medycynie Wykład 4 (3) Piotr Sauer Katedra Sterowania i Inżynierii Systemów Wymagania telemanipulatorów Kinematyka umożliwiająca penetrację przez powłoki skórne pacjenta Odpowiednia
Zastosowanie Robotyki w Medycynie Wykład 4 (3) Piotr Sauer Katedra Sterowania i Inżynierii Systemów Wymagania telemanipulatorów Kinematyka umożliwiająca penetrację przez powłoki skórne pacjenta Odpowiednia
Tokarka CNC z możliwością frezowania TBI TC 500 SMCY
 Tokarka CNC z możliwością frezowania TBI TC 500 SMCY Tokarka przygotowana do pracy z podajnikiem pręta, wyposażona w oś Y, umożliwiająca wysokowydajną produkcję seryjną detali. Ver_042018_04 TBI TC 500
Tokarka CNC z możliwością frezowania TBI TC 500 SMCY Tokarka przygotowana do pracy z podajnikiem pręta, wyposażona w oś Y, umożliwiająca wysokowydajną produkcję seryjną detali. Ver_042018_04 TBI TC 500
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
ANALIZA KINEMATYKI MANIPULATORÓW NA PRZYKŁADZIE ROBOTA LINIOWEGO O CZTERECH STOPNIACH SWOBODY
 MECHNIK 7/ Dr inż. Borys BOROWIK Politechnika Częstochowska Instytut Technologii Mechanicznych DOI:.78/mechanik..7. NLIZ KINEMTYKI MNIPULTORÓW N PRZYKŁDZIE ROBOT LINIOWEGO O CZTERECH STOPNICH SWOBODY Streszczenie:
MECHNIK 7/ Dr inż. Borys BOROWIK Politechnika Częstochowska Instytut Technologii Mechanicznych DOI:.78/mechanik..7. NLIZ KINEMTYKI MNIPULTORÓW N PRZYKŁDZIE ROBOT LINIOWEGO O CZTERECH STOPNICH SWOBODY Streszczenie:
BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-6 BADANIA PNEUMATYCZNEGO SIŁOWNIKA BEZTŁOCZYSKOWEGO Koncepcja i opracowanie: dr inż. Michał Krępski Łódź, 2011 r. Stanowiska
TEORIA MASZYN MECHANIZMÓW ĆWICZENIA LABORATORYJNE Badanie struktury modeli mechanizmów w laboratorium.
 MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
MiBM. Teoria maszyn i mechanizmów. Ćwiczenie laboratoryjne nr 1 str. 1 MiBM Akademia Górniczo-Hutnicza Wydział Inżynierii Mechanicznej i Robotyki Katedra Mechaniki i Wibroakustyki TEORIA MASZYN MECHANIZMÓW
1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.
 Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3.") PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
PLC 1) Podaj i opisz znane ci języki programowania sterowników opisanych w normie IEC 61131-3. 1.Ladder Diagram (LD) język graficzny schematów drabinkowych 2. Function Block Diagram (FBD) jezyk bloków
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
ROBOTY AUTOMATYZACJA PRODUKCJI
 ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
ROBOTY AUTOMATYZACJA PRODUKCJI Roboty najnowszej generacji 02 Dane techniczne oraz więcej informacji na www.dopak.pl ROBOTY NAJNOWSZEJ GENERACJI PICKERSPX10 Robot przeznaczony do odbioru wlewków jak również
PL B1. AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE, Kraków, PL BUP 14/18
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230767 (13) B1 (21) Numer zgłoszenia: 420034 (51) Int.Cl. B65G 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 29.12.2016
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 230767 (13) B1 (21) Numer zgłoszenia: 420034 (51) Int.Cl. B65G 7/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 29.12.2016
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
ZAPYTANIE OFERTOWE NR 1/05/2015
 ZAPYTANIE OFERTOWE NR 1/05/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną, państwowy instytut badawczy, instytut PAN lub inną jednostkę naukową będącą organizacją
ZAPYTANIE OFERTOWE NR 1/05/2015 dotyczące wyboru podwykonawcy części prac merytorycznych projektu przez uczelnię publiczną, państwowy instytut badawczy, instytut PAN lub inną jednostkę naukową będącą organizacją
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń
 Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek
 ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
Politechnika Poznańska
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Zakład Projektowania Technologii Rozprawa doktorska MARCIN WIŚNIEWSKI BADANIA DOKŁADNOŚCI I POWTARZALNOŚCI POZYCJONOWANIA
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Zakład Projektowania Technologii Rozprawa doktorska MARCIN WIŚNIEWSKI BADANIA DOKŁADNOŚCI I POWTARZALNOŚCI POZYCJONOWANIA
NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY
 MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 8, s. 18-19, Gliwice 2009 NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY KRYSTYNA ROMANIAK Wydział Architektury, Politechnika
MODELOWANIE INŻYNIERSKIE ISSN 1896-771X 8, s. 18-19, Gliwice 2009 NOWE METODY SYNTEZY STRUKTURALNEJ ŁAŃCUCHÓW KINEMATYCZNYCH O ZEROWEJ LICZBIE STOPNI SWOBODY KRYSTYNA ROMANIAK Wydział Architektury, Politechnika
Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Kalibracja robotów przemysłowych
 Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB
 METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB Marcin WIŚNIEWSKI Jan ŻUREK Olaf CISZAK Streszczenie W pracy omówiono szczegółowo metodykę pomiaru
METODYKA BADAŃ DOKŁADNOŚCI I POWTARZALNOŚCI ODWZOROWANIA TRAJEKTORII ROBOTA PRZEMYSŁOWEGO FANUC M-16iB Marcin WIŚNIEWSKI Jan ŻUREK Olaf CISZAK Streszczenie W pracy omówiono szczegółowo metodykę pomiaru
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI
 KATEDRA TECHIK WYTWARZAIA I AUTOMATYZACJI ISTRUKCJA DO ĆWICZEŃ LABORATORYJYCH Przedmiot: MASZYY TECHOLOGICZE Temat: Frezarka wspornikowa UFM 3 Plus r ćwiczenia: 2 Kierunek: Mechanika i budowa maszyn 1.
KATEDRA TECHIK WYTWARZAIA I AUTOMATYZACJI ISTRUKCJA DO ĆWICZEŃ LABORATORYJYCH Przedmiot: MASZYY TECHOLOGICZE Temat: Frezarka wspornikowa UFM 3 Plus r ćwiczenia: 2 Kierunek: Mechanika i budowa maszyn 1.
W Laboratorium Robotyki znajdują się m.in.:
 W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki FS003N z komputerem Kawasaki, kamerą ueye (z oryginalnymi kluczami dostępu), kontrolerem, Teach Pendant, przewodem do komunikacji między kamerą,
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Kemppi K5 Sprzęt spawalniczy
 KempArc SYN 500 AUTOMATYZACJA WYDAJNOŚCI I JAKOŚCI SPAWANIA Kemppi K5 Sprzęt spawalniczy 1(10) SYSTEM AUTOMATYZACJI SPAWANIA SYNERGIC MIG/MAG Szukasz wydajnego i niezawodnego rozwiązania do spawania zrobotyzowanego?
KempArc SYN 500 AUTOMATYZACJA WYDAJNOŚCI I JAKOŚCI SPAWANIA Kemppi K5 Sprzęt spawalniczy 1(10) SYSTEM AUTOMATYZACJI SPAWANIA SYNERGIC MIG/MAG Szukasz wydajnego i niezawodnego rozwiązania do spawania zrobotyzowanego?