15 grudnia 19 stycznia 11 luty -
|
|
|
- Zofia Owczarek
- 9 lat temu
- Przeglądów:
Transkrypt
1

2 Jak to się zaczęło? 15 grudnia 2010 r. zaprasza nas Koło Naukowe Robotyki Cyborg++ (Wydział Mechatroniki PW), 19 stycznia 2011 r. - nawiązaliśmy kontakt z kołem naukowym Bionic na Wydziale Elektroniki PW, 11 luty - otrzymaliśmy dotację z Urzędu miasta Warszawa w ramach z Warszawskich Inicjatyw Edukacyjnych (WIE).

3 Działalność koła ISKRA 5 marca udział w zawodach ROBOMATICON, 28 marca nasze koło zostało objęte oficjalnym patronetem przez Wydział Elektroniki PW, Od marca do maja uczestniczyliśmy w zajęciach w pracowni robotyki na Wydziale Elektroniki PW.

4 Działalność koła ISKRA 5 listopada zawody Sumo Challenge Łodzi. Więcej o kole na stronie:

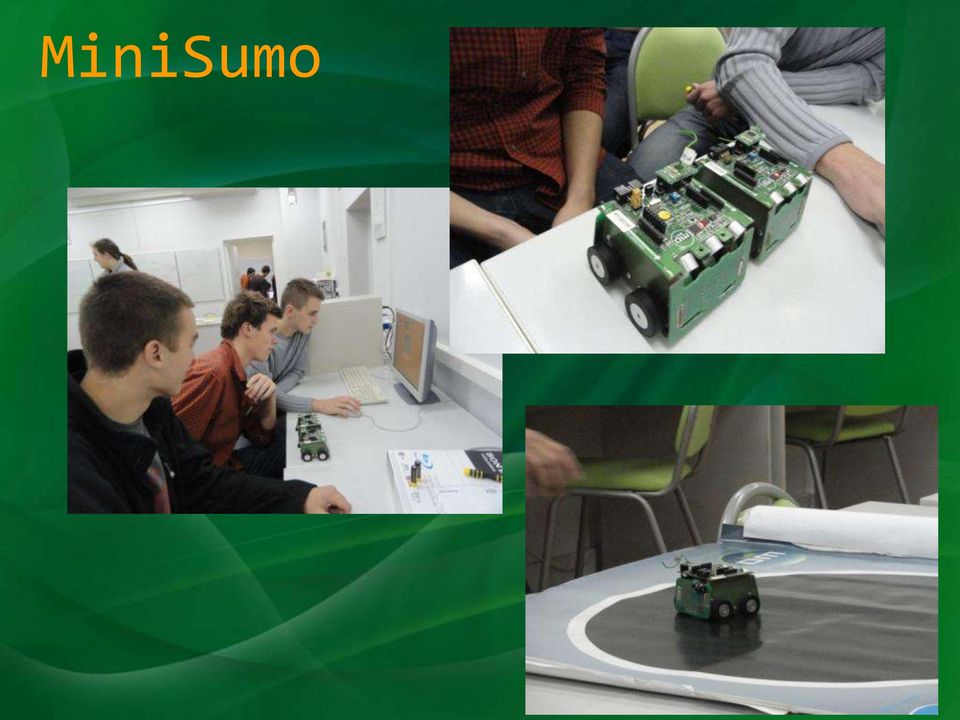
5 Zajęcia koła Zajęcia odbywają się w piątki od godziny 15.00, można nas odwiedzić zapraszamy! Pracujemy w zespołach, w trzech sekcjach: Projekty własne dwa zespoły uczniów przygotowują roboty w kategorii Linefollower i MicroMouse. LEGO na bazie 4. zestawów LEGO MINDSTORMS NXT MiniSumo na bazie dwóch robotów MAOR-12v2.

6 Nasze roboty w sekcji projekty własne

7 MiniSumo
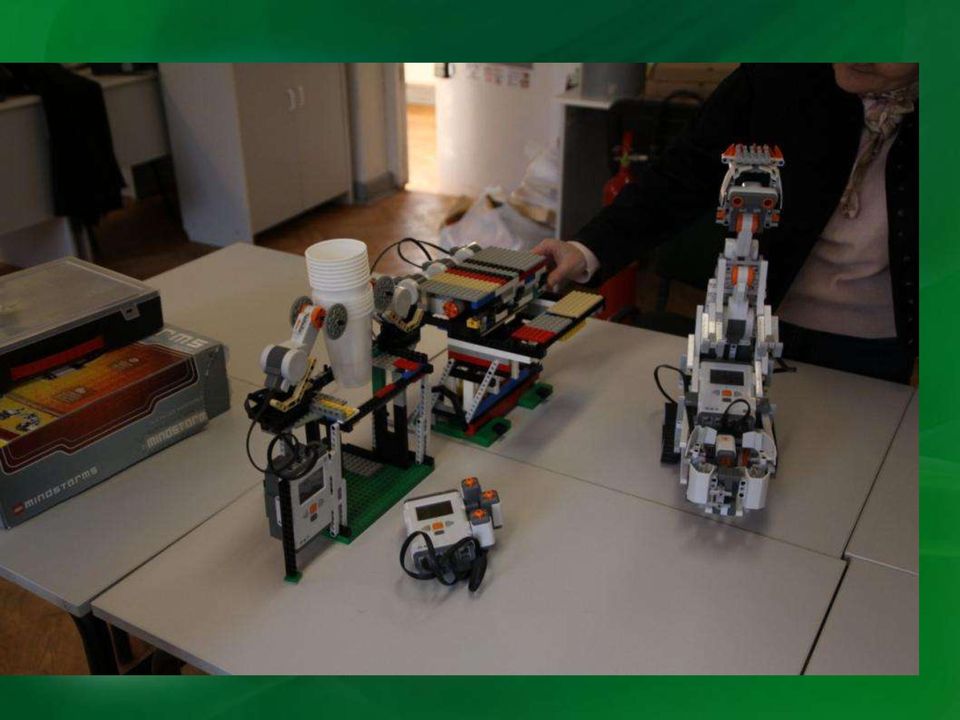
8 LEGO

9
10 Co już zrobiliśmy? Gdzie byliśmy?
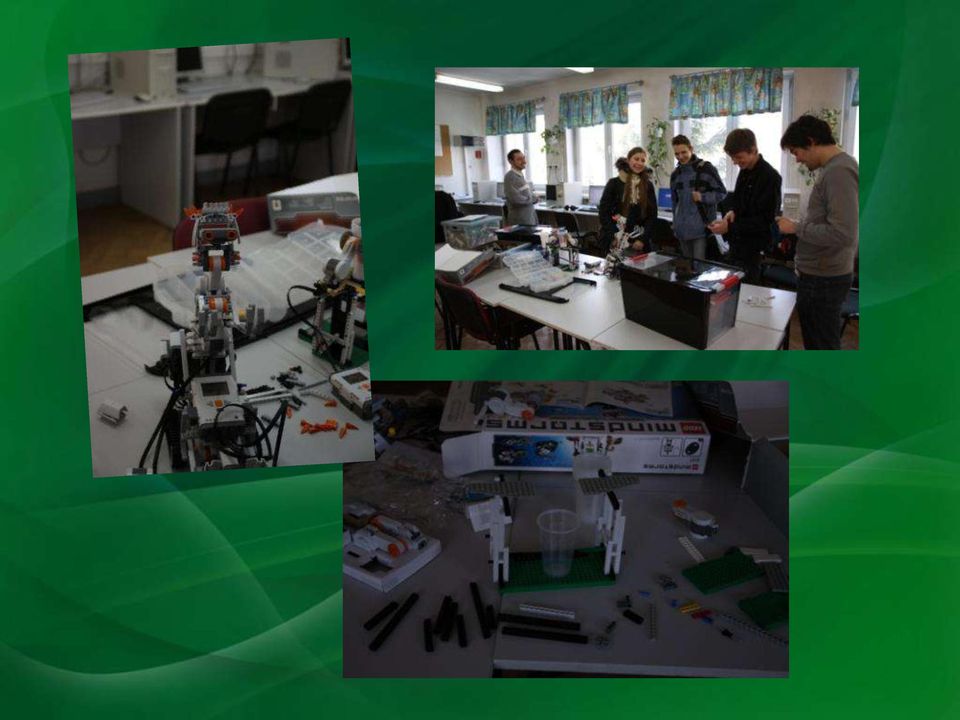
11 Początek działalności koła - rozpakowujemy zestawy LEGO i MiniSumo

12

13 Zajęcia na Wydziale Elektroniki w laboratorium robotyki. Gości nas studenckie koło naukowe Bionic - dowiedzieliśmy się jak projektować i wytrawiać płytki, jak lutować i posługiwać się oscyloskopem.

14

15 Przygotowania do pierwszych zawodów Podczas ferii (21 do 25 luty) trwają prace nad robotem PARDON, przygotowanym na zawody przez grupę: Piotr Waszkiewicz, Patryk Chmielewski, Dominik Piliszek, Bartosz Lodziński.

16 PARDON Plastikowy Ale Robotyczny Dystrybutor Orzeźwiających Napojów

17 PARDON Zadaniem robota było przyjęcie zamówienia na rodzaj napoju (Fanta, Cola, Sprite), podjechanie do dystrybutora kubków po kubek, podjechanie z kubkiem do dystrybutora napojów i częstowanie zamówionym napojem.

18
19

20
21 Robomaticon W konkursie ROBOMATICON zdobyliśmy wyróżnienie w kategorii Freestyle za robota PARDON
22 Drugie nasze zawody - SUMO CHALLENGE
23 Zabieramy 4 roboty, Jolly Maćka Kulawika w kategorii Linefollower, robot kroczący - Humanoid sprint i silnik pneumatyczny Paweł Wiencław, Szuler kategoria Freestyle Kuba Kreft. Otrzymaliśmy dwa trzecie miejsca.
24
25 O robotach
26 Pierwszy robot Nazwy robot po raz pierwszy użył czeski pisarz Karel Ĉapek w swej sztuce R.U.R. (Roboty Uniwersalne Rossuma). Pierwszym znanym robotem był Gołąb, powstały już w 350 r. p. n. e. Był to mechaniczny ptak, zbudowany przez Archytasa z Tarentu. Pierwszą udokumentowaną próbą zbudowania urządzenia naśladującego ludzkie zachowania był projekt mechanicznego rycerza wykonany przez Leonarda da Vinci.
27 Mechaniczna kaczka Rok 1738 r. - najbardziej znanym wynalazkiem był automat Vaucansona, którym była mechaniczna kaczka. Potrafiła poruszać się, pływać, kwakać, machać skrzydłami a nawet jeść oraz trawić pożywienie.
28 Trzy prawa robotyki Termin robotyka wprowadził Isaac Asimov w swoim opowiadaniu Zabawa w berka (Runaround, 1942). Jest on też autorem trzech praw robotyki: 1. Robot nie może skrzywdzić człowieka, ani przez zaniechanie działania dopuścić, aby człowiek doznał krzywdy. 2. Robot musi być posłuszny rozkazom człowieka, chyba że stoją one w sprzeczności z Pierwszym Prawem. 3. Robot musi chronić sam siebie, jeśli tylko nie stoi to w sprzeczności z Pierwszym lub Drugim Prawem.
29 Roboty dziś - rodzaje robotów wojskowe i policyjne do gospodarstwa domowego usługowe sektora publicznego eksploracyjne, poszukiwawcze, kosmiczne medyczne i egzoszkielety, chwytaki, manipulatory
30 Roboty przemysłowe Spawalnicze, montażowe, malarskie, do obróbki materiałów i manipulowania obiektami, do obsługi palet (pakujące, transportujące), do utylizacji i zabezpieczania odpadów, napełniające i dozujące, inspekcyjne i testujące.
31 Roboty latające, podwodne, roboty edukacyjne, roboty zabawki, do rozrywki, społeczne, interaktywne i terapeutyczne
32 Humanoidalny robot mobilny o imieniu Surena 2, Jest dziełem ponad dwudziestu inżynierów z uniwersytetu w Teheranie. Niemieccy inżynierowie zaprezentowali żeńskiego humanoida AILA. Mierzący 170 cm wysokości robot jest wyposażony w 22 mechaniczne stawy, pełniące rolę oczu lasery, kamerę 3D oraz czytnik RFID. Główną zaletą AILI jest umiejętność delikatnego obchodzenia się z przedmiotami.
33 Polskie roboty Robot medyczny Robin Heart stworzony przez zespół naukowców z Fundacji Rozwoju Kardiochirurgii w Zabrzu. System ten jest jednym z najnowocześniejszych na świecie robotów wspomagających bezinwazyjne operacje i jednocześnie jest to pierwszy europejski robot kardiochirurgiczny. Robot marsjański Skarabeusz zdalnie sterowany pojazd o wadze około 50 kg. Został wyposażony w kamerę i chwytak zamontowany na długim ramieniu. Jego konstrukcja jest w pełni nowatorska i zaprojektowana z myślą o warunkach, jakim musi sprostać.
34 Polskie roboty Robot marsjański Magma i Magma 2 Magma To zdalnie sterowany robot marsjański, wyposażony w kamerę, korzystającą ze słynnego algorytmu RODM. Jego konstrukcja jest w pełni nowatorska. Został skonstruowany przez studentów z Politechniki Białostockiej oraz Uniwersytetu Mikołaja Kopernika w Toruniu. Robot - geolog Jest bezprzewodowy, a wewnątrz otworów i dziur porusza się ruchem śrubowym. Może wspinać się w górę i w dół. Zawdzięcza to trzem kołom rozmieszczonym w obwodzie co 120 stopni, skręconym pod kątem 10 stopni. Wyposażony jest też w specjalne czujki. Może dotykać napotykane na drodze przeszkody, sprawdzać pozycję.
35 Polskie roboty Robot antyterrorystyczny Inspector i Expert Scout - mały robot pirotechniczny Robot bojowy Ibis Palaczbot - robot, który "pali" papierosy dokładnie w taki sam sposób, jak ludzie. Opracowanie go ma pozwolić prowadzić precyzyjne badania nad szkodliwości tych używek.
36 Magma 2 Śpiewający robot Signal - robot poza funkcjami reklamowymi i rozrywkowymi może służyć jako urządzenie do obserwacji i inwigilacji otoczenia
1. Kto wymyślił określenie robot?
 1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
1. Kto wymyślił określenie robot? 1. Izaak Asimov 2. Leonardo da Vinci 3. Karel Capek 4. Mityczny Hefajstos 2. Ile jest czujników linii w robocie MAOR-12v2? 1. 2 2. 4 3. 6 4. 8 3. Koło ISKRA powstało:
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
KOŁO ROBOTYKI W LICEUM POMYSŁ NA TWÓRCZE ZAJĘCIA POZALEKCYJNE. Hanna Stachera XIV LO im. S. Staszica w Warszawie
 KOŁO ROBOTYKI W LICEUM POMYSŁ NA TWÓRCZE ZAJĘCIA POZALEKCYJNE Hanna Stachera XIV LO im. S. Staszica w Warszawie stachera@staszic.waw.pl Plan prezentacji Początek działalności koła ISKRA Rodzaj zajęć w
KOŁO ROBOTYKI W LICEUM POMYSŁ NA TWÓRCZE ZAJĘCIA POZALEKCYJNE Hanna Stachera XIV LO im. S. Staszica w Warszawie stachera@staszic.waw.pl Plan prezentacji Początek działalności koła ISKRA Rodzaj zajęć w
prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski mgr inż. Stanisław Iszora mgr inż. Włodzimierz Sakwiński dr inż.
 Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1
 Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
Tytuł prezentacji. Autorzy
 Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
Wrocław, 30 marca 2017 Plan prezentacji 1 Wprowadzenie 2 Czy robot??? 3 Wzór i figur 4 Inne Nagłówek slajdu Przykład najprostszego slajdu z wypunktowaniem: tekst pierwszego punktu Nagłówek slajdu Przykład
w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty
 Dzień Robota w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty O robotach Nazwy robot po raz pierwszy użył czeski pisarz Karel Ĉapek w sztuce R.U.R. Rossum's Universal
Dzień Robota w XVIII LO im. Jana Zamoyskiego zorganizowany przez Zamoyskie Koło Robotyki Do Roboty O robotach Nazwy robot po raz pierwszy użył czeski pisarz Karel Ĉapek w sztuce R.U.R. Rossum's Universal
Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży
 Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży Budowanie robotów + Nauka Programowania + Dobra zabawa i konkursy Warsztaty TwojRobot.pl to nauka budowy i programowania robotów
Kursy pozalekcyjne z budowy i programowania robotów dla dzieci i młodzieży Budowanie robotów + Nauka Programowania + Dobra zabawa i konkursy Warsztaty TwojRobot.pl to nauka budowy i programowania robotów
Studenckie Koło Naukowe Controllers
 Studenckie Koło Naukowe Controllers Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Kraków, 16.03.2015 O nas Studenckie Koło Naukowe Controllers działa przy Katedrze Automatyzacji
Studenckie Koło Naukowe Controllers Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Kraków, 16.03.2015 O nas Studenckie Koło Naukowe Controllers działa przy Katedrze Automatyzacji
Mechatronika Uniwersytet Rzeszowski
 Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Propozycje konkurencji do zawodów robotów na bazie SZM.
 Propozycje konkurencji do zawodów robotów na bazie SZM. Tomasz Sudoł W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji
Propozycje konkurencji do zawodów robotów na bazie SZM. Tomasz Sudoł W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji
Katedra Systemów Automatyki. Specjalność: Systemy automatyki (studia II stopnia)
") Katedra Systemów Automatyki 1 Profil absolwenta (wiedza) Studenci naszej specjalności posiądą niezbędną wiedzę z zakresu: opracowywania algorytmów sterowania procesami w oparciu o najnowsze metody teorii
Katedra Systemów Automatyki 1 Profil absolwenta (wiedza) Studenci naszej specjalności posiądą niezbędną wiedzę z zakresu: opracowywania algorytmów sterowania procesami w oparciu o najnowsze metody teorii
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
kierowanych pojazdów podwodnych
 Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Systemy wspomagające obsługę zdalnie kierowanych pojazdów podwodnych Łukasz Józefowicz, 228934 ROV, czyli zdalnie kierowane pojazdy podwodne Skrót ROV pochodzi z języka angielskiego (Remotely Operated
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Projektowanie systemów mechatronicznych Rodzaj przedmiotu:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Projektowanie systemów mechatronicznych Rodzaj przedmiotu:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Projektowanie systemów Rodzaj przedmiotu: Fakultatywny Kod przedmiotu: MT 1 S 0 6 40-1_1 Rok: 3 Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Projektowanie systemów Rodzaj przedmiotu: Fakultatywny Kod przedmiotu: MT 1 S 0 6 40-1_1 Rok: 3 Semestr: 6 Forma studiów:
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
NOWOCZESNE WYKORZYSTANIE ROBOTYKI
 NOWOCZESNE WYKORZYSTANIE ROBOTYKI dr inż. Piotr Sauer Katedra Sterowania i Inżynierii Systemów dr inż. Piotr Sauer Politechnika Poznaoska, Wydział Informatyki, i ich zastosowao w przemyśle Katedra Sterowania
NOWOCZESNE WYKORZYSTANIE ROBOTYKI dr inż. Piotr Sauer Katedra Sterowania i Inżynierii Systemów dr inż. Piotr Sauer Politechnika Poznaoska, Wydział Informatyki, i ich zastosowao w przemyśle Katedra Sterowania
SZKOŁA PATENTÓW NA UTP
 SZKOŁA PATENTÓW NA UTP W dniach 5-6 październik 2018 Uniwersytet Technologiczno-Przyrodniczy w Bydgoszczy gościł w INWESTPARKu PIŁA podczas X Pilskich Subregionalnych Targów Pracy i Kariery w Pile. Przedstawicielami
SZKOŁA PATENTÓW NA UTP W dniach 5-6 październik 2018 Uniwersytet Technologiczno-Przyrodniczy w Bydgoszczy gościł w INWESTPARKu PIŁA podczas X Pilskich Subregionalnych Targów Pracy i Kariery w Pile. Przedstawicielami
PRZYKŁADY DZIAŁALNOŚCI STUDENCKICH KÓŁ NAUKOWYCH NA RZECZ OTOCZENIA
 P O L I T E C H N I K A W A R S Z A W S K A W Y D Z I A Ł T R A N S P O R T U PRZYKŁADY DZIAŁALNOŚCI STUDENCKICH KÓŁ NAUKOWYCH NA RZECZ OTOCZENIA Studenci działający w ramach Koła Naukowego Elektrotechniki
P O L I T E C H N I K A W A R S Z A W S K A W Y D Z I A Ł T R A N S P O R T U PRZYKŁADY DZIAŁALNOŚCI STUDENCKICH KÓŁ NAUKOWYCH NA RZECZ OTOCZENIA Studenci działający w ramach Koła Naukowego Elektrotechniki
Wyspecjalizowane roboty mobilne i ich zastosowania z naciskiem na
 Wyspecjalizowane roboty mobilne i ich zastosowania z naciskiem na przemysł górniczy Bartosz BABIAK Koło Naukowe Mechaników Górników Wydział inżynierii Mechanicznej i Robotyki Plan prezentacji Robot definicja
Wyspecjalizowane roboty mobilne i ich zastosowania z naciskiem na przemysł górniczy Bartosz BABIAK Koło Naukowe Mechaników Górników Wydział inżynierii Mechanicznej i Robotyki Plan prezentacji Robot definicja
POKL /10. Gliwice, SKN Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska RAPORT
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
Katedra Systemów Automatyki
 Katedra Systemów Automatyki rdzeń: Automatyka i robotyka strumień: Systemy automatyki email: ksa@eti.pg.gda.pl, www.eti.pg.edu.pl/katedra-systemow-automatyki PRACOWNICY Kierownik: prof. dr hab. inż. Maciej
Katedra Systemów Automatyki rdzeń: Automatyka i robotyka strumień: Systemy automatyki email: ksa@eti.pg.gda.pl, www.eti.pg.edu.pl/katedra-systemow-automatyki PRACOWNICY Kierownik: prof. dr hab. inż. Maciej
Mechatronika. Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy:
 Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Mechatronika, co dalej?
 Mechatronika, co dalej? W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji i budowy przyszłych kadr inżynieryjnotechnicznych
Mechatronika, co dalej? W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i działań uczniów gimnazjów dla edukacji i budowy przyszłych kadr inżynieryjnotechnicznych
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0. Temat: GrabBot Budujemy robota, który przenosi przedmioty.
 Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Lekcja budowania robotów na podstawie klocków LEGO Mindstorms NXT 2.0 Temat: GrabBot Budujemy robota, który przenosi przedmioty. Działanie robota GrabBot to robot mobilny o napędzie gąsienicowym, co daje
Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
HISTORIA ROBOTÓW. fot.
 około 350 p.n.e. HISTORIA ROBOTÓW http://www.asimo.pl, fot. www.thocp.net Wybitny grecki matematyk Archytas z Tarentu buduje mechanicznego ptaka, nazwanego Gołąb (ang. The Pigeon), napędzanego parą. Według
około 350 p.n.e. HISTORIA ROBOTÓW http://www.asimo.pl, fot. www.thocp.net Wybitny grecki matematyk Archytas z Tarentu buduje mechanicznego ptaka, nazwanego Gołąb (ang. The Pigeon), napędzanego parą. Według
POKL /10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
PRZEDSTAWIA Warszawa. Przemysłowy Instytut Automatyki i Pomiarów TYSIĄCE GOŚCI, DZIESIĄTKI ROBOTÓW, JEDNA NOC!
 PRZEDSTAWIA Noc Robotów 2010 21.05.2010 Warszawa Przemysłowy Instytut Automatyki i Pomiarów TYSIĄCE GOŚCI, DZIESIĄTKI ROBOTÓW, JEDNA NOC! www.nocrobotow.pl www.facebook.pl/nocrobotow Noc Robotów 2010 Odwiedziło
PRZEDSTAWIA Noc Robotów 2010 21.05.2010 Warszawa Przemysłowy Instytut Automatyki i Pomiarów TYSIĄCE GOŚCI, DZIESIĄTKI ROBOTÓW, JEDNA NOC! www.nocrobotow.pl www.facebook.pl/nocrobotow Noc Robotów 2010 Odwiedziło
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Szkoła Młodego Inżyniera - OFERTA
 2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
Technik Mechatronik. Kliknij, aby dodać tekst
 Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Warsztat Robotów. Nowoczesny wymiar edukacji. Propozycja zajęć z robotyki w Krakowskim Parku Technologicznym
 Warsztat Robotów Nowoczesny wymiar edukacji Propozycja zajęć z robotyki w Krakowskim Parku Technologicznym Nowoczesny Wymiar Edukacji 31-864 Kraków, Al. Jana Pawła II 41L 1 Spis treści oferty WARSZTATY
Warsztat Robotów Nowoczesny wymiar edukacji Propozycja zajęć z robotyki w Krakowskim Parku Technologicznym Nowoczesny Wymiar Edukacji 31-864 Kraków, Al. Jana Pawła II 41L 1 Spis treści oferty WARSZTATY
Regulamin zawodów. 1. Organizacja zawodów
 1 R e g u l a m i n Regulamin zawodów 1. Organizacja zawodów 1. Organizator Organizatorem zawodów Robo-Drift 2015 jest Międzywydziałowe Koło Naukowe Mechatroniki Synergia działające przy Katedrze Inżynierii
1 R e g u l a m i n Regulamin zawodów 1. Organizacja zawodów 1. Organizator Organizatorem zawodów Robo-Drift 2015 jest Międzywydziałowe Koło Naukowe Mechatroniki Synergia działające przy Katedrze Inżynierii
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego. Paweł Rzucidło
 Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE
 PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
PROGRAM SEMINARIUM 19-20.04.2012 SYSTEMY MECHATRONICZNE W DYDAKTYCE I PRZEMYŚLE 10.00 Powitanie uczestników i oficjalne otwarcie seminarium (AULA 02 COPENICANUM) Prof. dr hab. inż. Mariusz Kaczmarek UKW
Banki spółdzielcze przed wyzwaniem wielogeneracyjnego społeczeństwa 4.0
 Banki spółdzielcze przed wyzwaniem wielogeneracyjnego społeczeństwa 4.0 Wojciech Cellary Katedra Technologii Informacyjnych Uniwersytet Ekonomiczny w Poznaniu al. Niepodległości 10, 61-875 Poznań cellary@kti.ue.poznan.pl
Banki spółdzielcze przed wyzwaniem wielogeneracyjnego społeczeństwa 4.0 Wojciech Cellary Katedra Technologii Informacyjnych Uniwersytet Ekonomiczny w Poznaniu al. Niepodległości 10, 61-875 Poznań cellary@kti.ue.poznan.pl
OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH
 OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH O Nas Firma Nowoczesny Wymiar Edukacji - Warsztat Robotów, to projekt stworzony i realizowany przez młodych inżynierów,
OFERTA ZAJĘĆ Z ROBOTYKI I PROGRAMOWANIA DLA SZKÓŁ PODSTAWOWYCH ORAZ GIMNAZJALNYCH O Nas Firma Nowoczesny Wymiar Edukacji - Warsztat Robotów, to projekt stworzony i realizowany przez młodych inżynierów,
PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH
 PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH CZYM JEST PROGRAM ODKRYWCY DIAMENTÓW - dofinansowania projektów zespołów uczniowskich z woj. podlaskiego z zakresu nauk ścisłych, technologii,
PODLASKIE PARTNERSTWO SEKTORA BIZNESU I INSTYTUCJI EDUKACYJNYCH CZYM JEST PROGRAM ODKRYWCY DIAMENTÓW - dofinansowania projektów zespołów uczniowskich z woj. podlaskiego z zakresu nauk ścisłych, technologii,
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA , M.
 Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
Transfer technologii kosmicznych na potrzeby obronności i bezpieczeństwa w obszarze robotyki Wnioski z konferencji PERASPERA 19.02.2015, M.Wolski #1 Wprowadzenie Agenda prezentacji: O PIAP Strategiczne
LEKCJA 2 Program do zdalnego sterowania robotem
 LEKCJA 2 Program do zdalnego sterowania robotem Przedmiot: Informatyka Etap: klasa I-III, klasa IV-VI, klasa VII-VIII Czas na realizację: 45min. Autor: Grzegorz Troszyński Redakcja: Joanna Skalska Krótki
LEKCJA 2 Program do zdalnego sterowania robotem Przedmiot: Informatyka Etap: klasa I-III, klasa IV-VI, klasa VII-VIII Czas na realizację: 45min. Autor: Grzegorz Troszyński Redakcja: Joanna Skalska Krótki
Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
MozhePoyedzye. Robot klasy MiniSumo. Konrad Bednarek Michał Rataj
 MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
lider projektu: finansowanie:
 lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
lider projektu: finansowanie: - zapoznanie się z możliwościami budowania programów w Lego Mindstorms EV3 - budowa prostego robota z jednym silnikiem i jednym czujnikiem - naładowane zestawy Lego Mindstorms
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Systemy sterowania w robotyce i mechatronice
 Systemy sterowania w robotyce i mechatronice dr hab. inż. Grzegorz Granosik, Politechnika Łódzka TORUŃ 2014 W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i
Systemy sterowania w robotyce i mechatronice dr hab. inż. Grzegorz Granosik, Politechnika Łódzka TORUŃ 2014 W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie innowacyjnej myśli i
PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER
 PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER IDEA ZAJĘĆ Podczas zajęd dzieci w wieku 8 12 lat budują i programują roboty. Już na etapie podstawówki nasi podopieczni widzą naukę w kategoriach efektów
PÓŁKOLONIE dla Dzieci w wieku 8-12 LAT MŁODY INŻYNIER IDEA ZAJĘĆ Podczas zajęd dzieci w wieku 8 12 lat budują i programują roboty. Już na etapie podstawówki nasi podopieczni widzą naukę w kategoriach efektów
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
ROBOTYKA CO TO WŁAŚCIWIE JEST? 2 PIERWSZA KONSTRUKCJA I PROGRAMOWANIE 4 ROBOT SPRZĄTAJĄCY 6 ROBOT WYŚCIGÓWKA 8 LINEFOLLOWER 10 ROBOT PRZEMYSŁOWY 12
 Robotyka Aut orpr ogr amuz aj ęć: mgrzbi gni ew Woj t kowi ak Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego ROBOTYKA CO TO WŁAŚCIWIE JEST? 2 PIERWSZA
Robotyka Aut orpr ogr amuz aj ęć: mgrzbi gni ew Woj t kowi ak Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego ROBOTYKA CO TO WŁAŚCIWIE JEST? 2 PIERWSZA
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
EKSPLOATACJA POJAZDÓW SZYNOWYCH INFRASTRUKTURA I RUCH KOLEJOWY
 SPECJALNOŚĆ: EKSPLOATACJA POJAZDÓW SZYNOWYCH INFRASTRUKTURA I RUCH KOLEJOWY KATEDRA TRANSPORTU KOLEJOWEGO RT6 Katowice, 17 czerwca 2018 Kierunek TRANSPORT prowadzony na Wydziale Transportu Politechniki
SPECJALNOŚĆ: EKSPLOATACJA POJAZDÓW SZYNOWYCH INFRASTRUKTURA I RUCH KOLEJOWY KATEDRA TRANSPORTU KOLEJOWEGO RT6 Katowice, 17 czerwca 2018 Kierunek TRANSPORT prowadzony na Wydziale Transportu Politechniki
Raport z wyjazdu Koła Naukowego Robotyków KoNaR w ramach współpracy międzynarodowej z ośrodkiem naukowo-badawczym TERA w Chorwacji.
 Raport z wyjazdu Koła Naukowego Robotyków KoNaR w ramach współpracy międzynarodowej z ośrodkiem naukowo-badawczym TERA w Chorwacji Robert Budzioski Wrocław, 24.07.2009 Współpraca z TERA Współpraca zawiązała
Raport z wyjazdu Koła Naukowego Robotyków KoNaR w ramach współpracy międzynarodowej z ośrodkiem naukowo-badawczym TERA w Chorwacji Robert Budzioski Wrocław, 24.07.2009 Współpraca z TERA Współpraca zawiązała
MOGĄ TU STUDIOWAĆ OSOBY NIEPEŁNOSPRAWNE - posiadamy podjazd do budynku, odpowiednią windę i toaletę przystosowane do potrzeb osób niepełnosprawnych.
 Wydział Mechaniczny Politechniki Krakowskiej umożliwia wyższe kształcenie się na różnych poziomach i kierunkach dostosowanych do współczesnego rozwoju techniki i coraz bardziej różnorodnych potrzeb rynku
Wydział Mechaniczny Politechniki Krakowskiej umożliwia wyższe kształcenie się na różnych poziomach i kierunkach dostosowanych do współczesnego rozwoju techniki i coraz bardziej różnorodnych potrzeb rynku
Nadodrzański Oddział Straży Granicznej
 Nadodrzański Oddział Straży Granicznej Źródło: http://nadodrzanski.strazgraniczna.pl/nad/aktualnosci/20326,nowy-specjalistyczny-sprzet-pirotechniczny-na-wrocl awskim-lotnisku.html Wygenerowano: Poniedziałek,
Nadodrzański Oddział Straży Granicznej Źródło: http://nadodrzanski.strazgraniczna.pl/nad/aktualnosci/20326,nowy-specjalistyczny-sprzet-pirotechniczny-na-wrocl awskim-lotnisku.html Wygenerowano: Poniedziałek,
Autonomiczny robot mobilny LF3 klasy linefollower. Jacek Jankowski
 Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Technik automatyk. Zespół Szkół Nr 2 w Sanoku. Kierunek technik automatyk jest objęty patronatem firm Sanok Rubber Company i ADR Polska S.
 Technik automatyk Zespół Szkół Nr 2 w Sanoku Kierunek technik automatyk jest objęty patronatem firm Sanok Rubber Company i ADR Polska S.A Technik automatyk Technik automatyk to nowoczesny i atrakcyjny
Technik automatyk Zespół Szkół Nr 2 w Sanoku Kierunek technik automatyk jest objęty patronatem firm Sanok Rubber Company i ADR Polska S.A Technik automatyk Technik automatyk to nowoczesny i atrakcyjny
ROBODRIFT2016 Regulamin zawodów
 1 R e g u l a m i n ROBODRIFT2016 ROBODRIFT2016 Regulamin zawodów 1 Organizacja zawodów 1.1 Organizator Organizatorem zawodów Robo-Drift 2015 jest Międzywydziałowe Koło Naukowe Mechatroniki Synergia działające
1 R e g u l a m i n ROBODRIFT2016 ROBODRIFT2016 Regulamin zawodów 1 Organizacja zawodów 1.1 Organizator Organizatorem zawodów Robo-Drift 2015 jest Międzywydziałowe Koło Naukowe Mechatroniki Synergia działające
Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki
 Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki dr hab. inż. Grzegorz Granosik, Politechnika Łódzka W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie
Zdalne sterowanie i autonomia pojazdów - wyzwania dla mechatroniki i robotyki dr hab. inż. Grzegorz Granosik, Politechnika Łódzka W ramach realizacji projektu: Mechatronika jako praktyczne zastosowanie
Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat
 Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
TECHNIK MECHATRONIK. Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne
 TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
TECHNIK MECHATRONIK Źródło:M.Olszewski-Urządzenia i systemy mechatroniczne Mechatronika to nauka istniejąca na styku kilku innych dziedzin wiedzy: mechaniki, elektroniki, informatyki, elektrotechniki,
MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces.
 AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
AKADEMIA HUMANISTYCZNO-EKONOMICZNA W ŁODZI otwiera NOWY KIERUNEK MECHANIKA I BUDOWA MASZYN Wiedza i kreatywność to twój sukces. Zachęcamy do studiowania na 3.5 - letnich inżynierskich studiach stacjonarnych
Research & Development. Zespół R&D
 Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Zespół R&D Główne zadania Nowe produkty i technologie Symulacje procesów Dobór technologii Testy Konsultacje Wsparcie techniczne Zespół R&D Piotr Marszałek Technolog procesów wytwarzania Paweł Przybyszewski
Technik mechanik. Zespół Szkół Nr 2 w Sanoku
 Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Technik mechanik Zespół Szkół Nr 2 w Sanoku Technik mechanik Głównym celem pracy technika mechanika jest naprawa maszyn i urządzeń technicznych oraz uczestniczenie w procesie ich wytwarzania i użytkowania.
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2017 kierunek AiR Lp. Temat Cel Zakres Prowadzący 1/I8/ARi/17/Z Automatyczny mini wojownik. projektowania urządzeń automatycznych opartych
kierunek przyszłość CENTRUM KSZTAŁCENIA ZAWODOWEGO W WYSOKIEM MAZOWIECKIEM
 kierunek przyszłość CENTRUM KSZTAŁCENIA ZAWODOWEGO W WYSOKIEM MAZOWIECKIEM OFERTA EDUKACYJNA Po ukończeniu gimnazjum czy szkoły podstawowej i napisaniu testów końcowych, czeka was jeszcze jeden ważny sprawdzian
kierunek przyszłość CENTRUM KSZTAŁCENIA ZAWODOWEGO W WYSOKIEM MAZOWIECKIEM OFERTA EDUKACYJNA Po ukończeniu gimnazjum czy szkoły podstawowej i napisaniu testów końcowych, czeka was jeszcze jeden ważny sprawdzian
Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej
 Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej Instytut Sterowania i Elektroniki Przemysłowej - ISEP Zakład Elektroniki Przemysłowej
Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej Instytut Sterowania i Elektroniki Przemysłowej - ISEP Zakład Elektroniki Przemysłowej
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
#UczymyDzieciProgramować #ZadanieWprogramie
 #ZadanieWie Temat : W marcu jak w garncu Wiek: edukacja przedszkolna, edukacja wczesnoszkolna Autor: Anna Świć Czas trwania: 0-0 min (uzależniony od wieku, możliwości rozwojowych grupy oraz jej liczebności)
#ZadanieWie Temat : W marcu jak w garncu Wiek: edukacja przedszkolna, edukacja wczesnoszkolna Autor: Anna Świć Czas trwania: 0-0 min (uzależniony od wieku, możliwości rozwojowych grupy oraz jej liczebności)
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
pierwszy termin egzamin poprawkowy
 Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Zapotrzebowanie na kwalifikacje zawodowe w obszarze mechatroniki na podstawie badań własnych Obserwatorium Rynku Pracy dla Edukacji
 Zapotrzebowanie na kwalifikacje zawodowe w obszarze mechatroniki na podstawie badań własnych Obserwatorium Rynku Pracy dla Edukacji PROFIL GOSPODARKI ŁODZI I REGIONU MONOKULTURA PRZEMYSŁOWA WIELOŚĆ BRANŻ
Zapotrzebowanie na kwalifikacje zawodowe w obszarze mechatroniki na podstawie badań własnych Obserwatorium Rynku Pracy dla Edukacji PROFIL GOSPODARKI ŁODZI I REGIONU MONOKULTURA PRZEMYSŁOWA WIELOŚĆ BRANŻ
SPECJALNOŚĆ ELEKTRONIKA PRZEMYSŁOWA
 SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
PROPOZYCJA INNOWACYJNEJ TECHNOLOGII. Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu
 PROPOZYCJA INNOWACYJNEJ TECHNOLOGII Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu 1. WSTĘP Przedmiotem wynalazku jest urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas
PROPOZYCJA INNOWACYJNEJ TECHNOLOGII Urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas transportu 1. WSTĘP Przedmiotem wynalazku jest urządzenie do stabilizacji pozycji pacjenta zwłaszcza podczas
Prezentacja specjalności Elektroenergetyka. Instytut Systemów Elektronicznych
 Prezentacja specjalności Elektroenergetyka Instytut Systemów Elektronicznych Plan prezentacji: Charakterystyka specjalności i profil absolwenta Wybrane realizowane przedmioty Współpracujące Instytucje
Prezentacja specjalności Elektroenergetyka Instytut Systemów Elektronicznych Plan prezentacji: Charakterystyka specjalności i profil absolwenta Wybrane realizowane przedmioty Współpracujące Instytucje
CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)?
 OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)?") NeoRobots Sp. z o.o. ul. Agrestowa 14 62-070 Dą browa CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)? Jakie są różnice wizualne zestawów Lego
NeoRobots Sp. z o.o. ul. Agrestowa 14 62-070 Dą browa CZYM RÓŻNI SIĘ ZESTAW LEGO MINDSTORMS EV3 W WERSJI DOMOWEJ (31313) OD ZESTAWU W WERSJI EDUKACYJNEJ (45544)? Jakie są różnice wizualne zestawów Lego
Międzyszkolny turniej robotów. DZIEŃ OTWARTY WSTI r. REGULAMIN
 Międzyszkolny turniej robotów DZIEŃ OTWARTY WSTI 04.04.2019r. REGULAMIN 1. Organizator: Wyższa Szkoła Technologii Informatycznych w Katowicach Katowice, ul. Mickiewicza 29 Miejsce: Sala kinowa, Wieża B,
Międzyszkolny turniej robotów DZIEŃ OTWARTY WSTI 04.04.2019r. REGULAMIN 1. Organizator: Wyższa Szkoła Technologii Informatycznych w Katowicach Katowice, ul. Mickiewicza 29 Miejsce: Sala kinowa, Wieża B,
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
LEKCJA 1 Poznajemy robota mbot
 LEKCJA 1 Poznajemy robota mbot Przedmiot: Technika, Informatyka Etap: klasa I-III, klasa IV-VI Czas na realizację: 45min. Autor: Grzegorz Troszyński Redakcja: Joanna Skalska Krótki opis zajęć: Budowa robotów
LEKCJA 1 Poznajemy robota mbot Przedmiot: Technika, Informatyka Etap: klasa I-III, klasa IV-VI Czas na realizację: 45min. Autor: Grzegorz Troszyński Redakcja: Joanna Skalska Krótki opis zajęć: Budowa robotów
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym
 Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
Bezpieczna obsługa oraz praca robota na stanowisku przemysłowym Dr inż. Tomasz Buratowski Wydział inżynierii Mechanicznej i Robotyki Katedra Robotyki i Mechatroniki Bezpieczna Obsługa Robota Podstawowe
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
EiT_S_I_RwM_EM Robotyka w medycynie Robotics in Medicine
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
Nazwa przedmiotu: Kierunek: Mechatronika UKŁADY NAPĘDOWE MASZYN I URZĄDZEO Drive systems of machines and devices Forma studiów: stacjonarne Kod przedmiotu: B04 Rodzaj przedmiotu: obowiązkowy dla kierunku
Oferta edukacyjna Uniwersytetu Rzeszowskiego. www.mechatronika.univ.rzeszow.pl
 Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
Oferta edukacyjna Uniwersytetu Rzeszowskiego Czym jest Mechatronika? Mechatronika jest dynamicznie rozwijającą się interdyscyplinarną dziedziną wiedzy, stanowiącą synergiczne połączenie takich dyscyplin,
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
AiR_ATW_7/1 Automatyzacja technik wytwarzania Manufacturing Systems Automation
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
PROJEKTOWANIE MECHATRONICZNE
 Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Przedmiot: PROJEKTOWANIE MECHATRONICZNE Prowadzący: Prof. dr hab. inż. Krzysztof J. Kaliński, prof. zw. PG Katedra Mechaniki i Mechatroniki 108 WM, kkalinsk@o2.pl Konsultacje: wtorek 14:00 15:00 czwartek
Podstawy robotyki. Studia stacjonarne, AiR, II rok. Bartosz Kuczewski. PWSZ Gªogów, 2010
 Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
Prośba o dofinansowanie
 Studencki projekt: Mars napada Data : 2006-2008 Prośba o dofinansowanie Autorzy: Michał Feliksik Paweł Kuśmierski Piotr Dereszowski Kontakt: http://mars-napada.pl mars.napada@gmail.com Opis projektu: Próba
Studencki projekt: Mars napada Data : 2006-2008 Prośba o dofinansowanie Autorzy: Michał Feliksik Paweł Kuśmierski Piotr Dereszowski Kontakt: http://mars-napada.pl mars.napada@gmail.com Opis projektu: Próba
Harmonogram Dnia z mechatroniką podzielony został na 3 etapy, w których mogą wziąć udział 30- osobowe grupy.
 Opublikowano Politechnika Łódzka - Rekrutacja (https://rekrutacja.p.lodz.pl) Wydział Mechaniczny i Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki ul. B. Stefanowskiego 1/15 i 18/22 90-924
Opublikowano Politechnika Łódzka - Rekrutacja (https://rekrutacja.p.lodz.pl) Wydział Mechaniczny i Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki ul. B. Stefanowskiego 1/15 i 18/22 90-924
REGULAMIN ZAWODÓW ROBOTÓW RCRE LEGO CHALLENGE 2014
 REGULAMIN ZAWODÓW ROBOTÓW RCRE LEGO CHALLENGE 2014 Głównym celem organizowanych przez Regionalne Centrum Rozwoju Edukacji w Opolu zawodów pn.: RCRE Lego Challange jest promowanie robotyki, jako nowoczesnej
REGULAMIN ZAWODÓW ROBOTÓW RCRE LEGO CHALLENGE 2014 Głównym celem organizowanych przez Regionalne Centrum Rozwoju Edukacji w Opolu zawodów pn.: RCRE Lego Challange jest promowanie robotyki, jako nowoczesnej
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Rozstrzygnięcie konkursu Model 3D/2D robota wykonany w SOLID EDGE, Wydział Technologiczny WSG, Bydgoszczy,
 Rozstrzygnięcie konkursu Model 3D/2D robota wykonany w SOLID EDGE, Wydział Technologiczny WSG, Bydgoszczy, 2011.02.06. Jedną z uczelni wyższych zaprzyjaźnionych z GM System jest Wyższa Szkoła Gospodarki
Rozstrzygnięcie konkursu Model 3D/2D robota wykonany w SOLID EDGE, Wydział Technologiczny WSG, Bydgoszczy, 2011.02.06. Jedną z uczelni wyższych zaprzyjaźnionych z GM System jest Wyższa Szkoła Gospodarki
Regulamin wydarzenia pod nazwą ReMY Remote Mars Yard (zwany dalej Regulaminem )
") Regulamin wydarzenia pod nazwą ReMY Remote Mars Yard (zwany dalej Regulaminem ) 1 Postanowienia ogólne 1. Niniejszy Regulamin ustala i reguluje zasady organizacji i przeprowadzenia wydarzenia pod nazwą
Regulamin wydarzenia pod nazwą ReMY Remote Mars Yard (zwany dalej Regulaminem ) 1 Postanowienia ogólne 1. Niniejszy Regulamin ustala i reguluje zasady organizacji i przeprowadzenia wydarzenia pod nazwą