Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
|
|
|
- Seweryna Biernacka
- 9 lat temu
- Przeglądów:
Transkrypt
1 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia robotyki, działy robotyki, definicja robota i elementy składowe systemu robotycznego: efektory, czujniki, układ lokomocji, układ sterowania komputerowego. Rodzaje robotów i ich charakterystyka oraz zastosowania: roboty mobilne (kołowe, gąsienicowe, kroczące, pływające, latające), roboty manipulacyjne; roboty przemysłowe, usługowe, roboty specjalne. Budowa i programowanie robotów modułowych zestawy Lego NXT Mindstorms: budowa i funkcje mikrosterownika NXT, silniki i czujniki. Budowa i funkcje środowiska NBC/NXC do programowania robotów. Opis połoŝenia i orientacji: podstawowe pojęcia matematyczne, wybrane reprezentacje połoŝenia i orientacji, macierz przekształcenia jednorodnego. Opis prędkości: prędkość liniowa i prędkość kątowa. Kinematyka układu robotycznego: więzy holonomiczne i nieholonomiczne, struktury kinematyczne manipulatorów robotów. Kinematyka manipulatora: reprezentacja Denavita- Hartenberga, proste i odwrotne zadanie kinematyki. Plan wykładu... Jakobiany: analityczny i geometryczny manipulatora. Układy lokomocji. Roboty kroczące (skaczące, dwunoŝne, cztero-, sześcio-, ośmionoŝne), roboty kołowe. Podstawowe rodzaje baz jezdnych kołowych robotów mobilnych i ich charakterystyka. Opis i klasyfikacja robotów kołowych. Rodzaje kół. Kinematyka robota mobilnego: równania ruchu prostych robotów kołowych, pojęcia mobilności i sterowności i manewrowości robotów kołowych. Percepcja. Klasyfikacja czujników. Czujniki stosowane w robotach: odometryczne, inercyjne, dotykowe, zbliŝeniowe, odległości, orientacji, kamery wizyjne. Przetwarzanie danych. Problem autonomicznej nawigacji robota mobilnego: samolokalizacja, planowanie ścieŝki, tworzenie mapy środowiska. Struktury i metody sterowania robotów: sterowanie reaktywne, behawioralne, bazujące na modelu, struktury hybrydowe. Plan wykładu... Systemy wielorobotowe. Cele tworzenia, problemy i typowe zadania (np. RoboCup). Podział systemów wielorobotowych ze względu na: strukturę organizacji, sposoby komunikacji oraz stopień współpracy robotów. Uczenie się agentów/robotów: cele i rodzaje uczenia się, metody uczenia się.
, roboty manipulacyjne; roboty przemysłowe, usługowe, roboty specjalne.")
2 Literatura 1. Szynkiewicz W.: Rozszerzony konspekt wykładu: Wstęp do Robotyki 2. Arkin R.: Behavior-Based Robotics (Intelligent Robotics and Autonomous Agents), MIT Press, Craig J.: Wprowadzenie do robotyki, WNT, Dudek G., Jenkin M.: Computational Principles of Mobile Robotics Cambridge University Press, Kozłowski K., Dutkiewicz P., Wróblewski W.: Modelowanie i sterowanie robotów, PWN, Warszawa, Russell S., Norvig P.: Artificial Intelligence: A Modern Approach, Prentice Hall, 2nd edition, Siegwart R., Nourbakhsh I. R.: Introduction to Autonomous Mobile Robots, The MIT Press, Spong M.W., Vidyasagar M.: Dynamika i sterowanie robotów, WNT, Warszawa, Tchoń K., Mazur A., Dulęba I., Hossa R., Muszyński R.: Manipulatory i roboty mobilne, Akademicka Oficyna Wydawnicza PLJ, Zielińska T.: Maszyny kroczące, PWN, Warszawa, Plan wykładu 1 Definicje robota i geneza słowa robot. Co to jest robotyka? Krótka historia robotyki. Podstawowe pojęcia robotyki. Po co konstruujemy roboty? Elementy składowe robota. Rodzaje robotów i ich charakterystyka. Wybrane zastosowania robotów. Definicje robota i geneza słowa robot Programowalny, wielofunkcyjny manipulator zaprojektowany do przemieszczania materiałów, narzędzi lub specjalizowanych urządzeń poprzez róŝne programowane ruchy w celu realizacji róŝnych zadań [RIA]. Autonomiczne urządzenie wykonujące funkcje zazwyczaj przypisane ludziom czasem jest to nawet maszyna imitująca człowieka [słownik języka polskiego, słownik Webstera]. System, który istnieje w fizycznym świecie i autonomicznie wyczuwa swoje otoczenie i celowo na nie oddziałuje. Robot to inteligentne połączenie pomiędzy percepcją i działaniem [M.Brady]. Termin,,robot pochodzi od czeskiego słowa,,robota czyli pańszczyzna (w domyśle praca niewolnicza) [KarelČapek -,,R.U.R (Rossum s Universal Robots), 1920].,,Robotyka zajmuje się projektowaniem, budową, badaniem i wykorzystaniem robotów [słowo,,robotics - Isaac Asimov, 1941, opowiadanie Liar! ]. Elektronika Biologia Mechanika Robotyka Informatyka Matematyka Automatyka

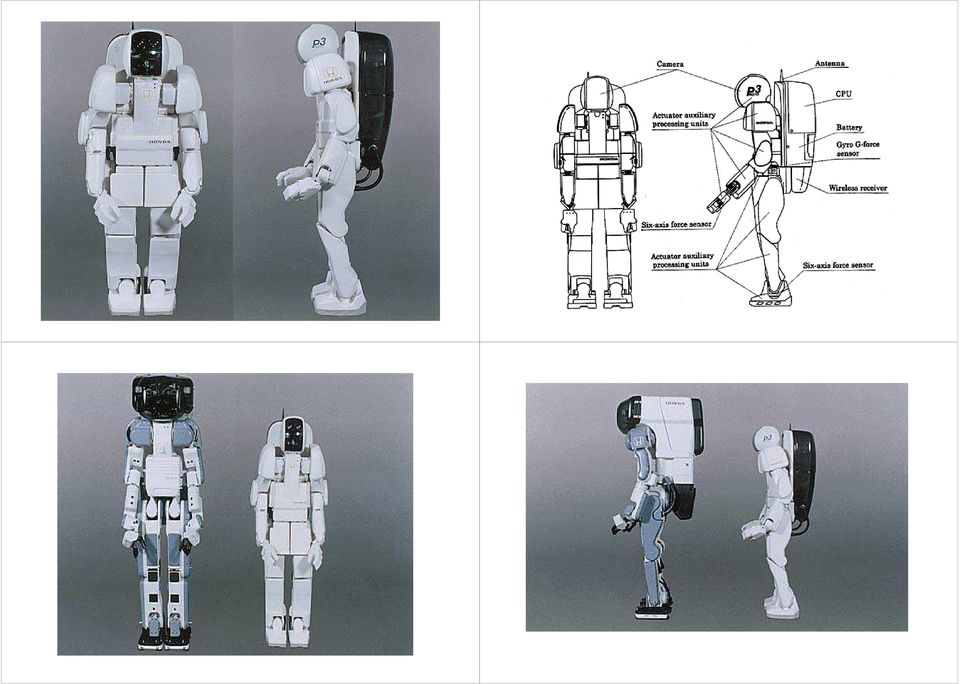
3 Krótka historia robotyki Egipt, 1400 p.n.e zegary wodne, ruchome figury (wyrocznie) StaroŜytna Grecja, Bibilonia, Chiny mechanizmy (ruchome posągi) napędzane spadającą wodą, parą wodną i piaskiem 1737 mechaniczna kaczka (chodziła, ruszała skrzydłami, kwakała, jadła i wydalała) [Jacques de Vaucanson] 1770 automaty krzywkowe napędzane spręŝynowym mechanizmem zegarowym (pisały, rysowały, grały na instrumentach muzycznych) [Pierre i Henri-Louis Jaquet-Droz] 1940 cybernetyka [Norbert Wiener] 1950 cybernetyczne Ŝółwie [W. Grey Walter] 1956 pierwszy manipulator Unimate [G. Devol, J. Engelberger] 1961 pierwszy robot w przemyśle samochodowym [General Motors] 1966 pierwszy robot mobilny Shakey [Stanford Research Institute] 1970 pojazd Łunachod do badania powierzchni KsięŜyca [ZSRR] 1973 pierwszy język programowania robotów (WAVE) [Univ. Stanford] 1974 robot ze sterowaniem komputerowym T^3 [Cincinnati Milacron] 1996 robot humanoidalny P3 (Asimo 2003) [Honda] 1997 robot Sojourner do eksploracji powierzchni Marsa [NASA JPL] Historyczne automaty - roboty
![skrzydłami, kwakała, jadła i wydalała) [Jacques de Vaucanson] 1770 automaty krzywkowe napędzane spręŝynowym mechanizmem zegarowym (pisały, rysowały, grały na instrumentach muzycznych) [Pierre i](/docs-images/40/7360940/images/page_3.jpg "Henri-Louis Jaquet-Droz] 1940 cybernetyka [Norbert Wiener] 1950 cybernetyczne Ŝółwie [W. Grey Walter] 1956 pierwszy manipulator Unimate [G. Devol, J.")
4 Ograniczone moŝliwości zmysłów Elementy składowe robota Receptory (czujniki) fizyczne urządzenia, które mierzą wielkości fizyczne (wizyjne, ultradźwiękowe, zbliŝeniowe, dotykowe) Efektory układy wykonawcze, napędy, narzędzia Układ sterujący sterowniki, komputer sterujący Czujniki Sensors Procesor Efektory Sensors

5 Typy robotów Manipulatory przemysłowe szeregowe równoległe Roboty mobilne autonomiczne pojazdy kołowe pojazdy podwodne pojazdy pływające maszyny kroczące, skaczące roboty latające roboty kosmiczne Roboty specjalne mikro, nanoroboty

6

7 Autonomiczny samochód CMU NavLab Ford Model T Przemieszczanie się jazda pokonywanie przeszkód

8

9 Roboty humanoidalne

10 Maszyny kroczące Maszyny kroczące

11 Roboty podwodne manipulacja Manipulacja chwyt Manipulacja chwyt manipulacja

12 Zastosowania robotów Przemysłowe Kosmiczne Inspekcyjno-interwencyjne Wojskowe Medyczne Usługowe

13 Maszyny latające Predator

14

15

16 Odkurzacze spalinowe Hercules H.C.Booth 1901 (GB) Electrolux Trilobite 2001 McCreery 1902 (USA) Elektryczny Hoover 1907 Odkurzacze o napędzie ręcznym

17 Nasze roboty Nasze roboty

18 Nasze roboty Roboty edukacyjne Roboty edukacyjne

Podstawy robotyki - opis przedmiotu
 Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Podstawy robotyki - opis przedmiotu Informacje ogólne Nazwa przedmiotu Podstawy robotyki Kod przedmiotu 06.9-WE-AiRP-PR Wydział Kierunek Wydział Informatyki, Elektrotechniki i Automatyki Automatyka i robotyka
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Wstęp do Robotyki (Zakres materiału na egzamin)
") Wstęp do Robotyki c W. Szynkiewicz, 9 1 Wstęp do Robotyki (Zakres materiału na egzamin) 1. Podstawowe pojęcia z dziedziny robotyki: krótka historia robotyki, działy robotyki, definicja robota. Elementy
Wstęp do Robotyki c W. Szynkiewicz, 9 1 Wstęp do Robotyki (Zakres materiału na egzamin) 1. Podstawowe pojęcia z dziedziny robotyki: krótka historia robotyki, działy robotyki, definicja robota. Elementy
Kinematyka manipulatora równoległego typu DELTA 106 Kinematyka manipulatora równoległego hexapod 110 Kinematyka robotów mobilnych 113
 Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Spis treści Wstęp 11 1. Rozwój robotyki 15 Rys historyczny rozwoju robotyki 15 Dane statystyczne ilustrujące rozwój robotyki przemysłowej 18 Czynniki stymulujące rozwój robotyki 23 Zakres i problematyka
Wykład Ćwiczenia Laborat orium. Zaliczenie na ocenę
 Wydział Elektroniki PWr KARTA PRZEDMIOTU Nazwa w języku polskim: Robotyka 1 Nazwa w języku angielskim: Robotics 1 Kierunek studiów: Automatyka i Robotyka Stopień studiów i forma: I stopień, stacjonarna
Wydział Elektroniki PWr KARTA PRZEDMIOTU Nazwa w języku polskim: Robotyka 1 Nazwa w języku angielskim: Robotics 1 Kierunek studiów: Automatyka i Robotyka Stopień studiów i forma: I stopień, stacjonarna
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Rok akademicki: 2015/2016 Kod: RME s Punkty ECTS: 12. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2015/2016 Kod: RME-1-504-s Punkty ECTS: 12 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Poziom studiów: Studia I stopnia
Temat 1. Wprowadzenie do nawigacji robotów mobilnych. Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera
 Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
pierwszy termin egzamin poprawkowy
 Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
Kierunek: MECHATRONIKA - studia I stopnia Analiza matematyczna i równania różniczkowe Mechanika. 2 Podstawy konstrukcji maszyn Robotyka 3 SYSTEMY STEROWANIA Kinematyka i dynamika manipulatorów i robotów
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA - ROBOTY PRZEMYSŁOWE 2. Kod przedmiotu: Err1 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Mechatronika 5. Specjalność: Zastosowanie
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Nazwa przedmiotu: Kierunek: MECHANIKA I BUDOWA MASZYN Rodzaj przedmiotu: obowiązkowy na kierunku Rodzaj zajęć: wykład, laboratorium ROBOTYKA Robotics Forma studiów: stacjonarne Poziom przedmiotu: I stopnia
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:
 modułu/przedmiotu Mechatronika Studia pierwszego stopnia. Podstawy robotyki Rodzaj przedmiotu: Zaliczenie Język wykładowy:") Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Karta (sylabus) modułu/przedmiotu Mechatronika Studia pierwszego stopnia Przedmiot: Podstawy robotyki Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MT 1 S 0 6 38-0_1 Rok: III Semestr: 6 Forma studiów:
Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne dr inż. Andrzej Chmielniak Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Autonomiczne Roboty Mobilne dr inż. Andrzej Chmielniak Instytut
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PODSTAWY ROBOTYKI 2. Kod przedmiotu: Sr 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka
I. KARTA PRZEDMIOTU. Nazwa przedmiotu: PODSTAWY ROBOTYKI 2. Kod przedmiotu: Sr 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Elektroautomatyka
Modelowanie i symulacja II Modelling and Simulation II. Automatyka i Robotyka II stopień ogólno akademicki studia stacjonarne
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Modelowanie i symulacja II Modelling and Simulation II A. USYTUOWANIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014 Modelowanie i symulacja II Modelling and Simulation II A. USYTUOWANIE
Wprowadzenie do robotyki
 Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
nr projektu w Politechnice Śląskiej 11/030/FSD18/0222 KARTA PRZEDMIOTU
 Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
Z1-PU7 WYDANIE N3 Strona: 1 z 5 (pieczęć jednostki organizacyjnej) KARTA PRZEDMIOTU 1) Nazwa przedmiotu: AUTOMATYZACJA I ROBOTYZACJA PROCESÓW 3) Karta przedmiotu ważna od roku akademickiego: 2018/2019
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Kinematyka robotów mobilnych
 Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski mgr inż. Stanisław Iszora mgr inż. Włodzimierz Sakwiński dr inż.
 Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Katedra Systemów Automatyki Katedra Systemów Automatyki prof. dr hab. inż. Maciej Niedźwiecki dr hab. inż. Piotr Suchomski dr inż. Paweł Raczyński dr inż. Stefan Sieklicki dr inż. Krzysztof Cisowski mgr
Wprowadzenie do teorii systemów ekspertowych
 Myślące komputery przyszłość czy utopia? Wprowadzenie do teorii systemów ekspertowych Roman Simiński siminski@us.edu.pl Wizja inteligentnych maszyn jest od wielu lat obecna w literaturze oraz filmach z
Myślące komputery przyszłość czy utopia? Wprowadzenie do teorii systemów ekspertowych Roman Simiński siminski@us.edu.pl Wizja inteligentnych maszyn jest od wielu lat obecna w literaturze oraz filmach z
Rok akademicki: 2013/2014 Kod: RAR s Punkty ECTS: 5. Poziom studiów: Studia I stopnia Forma i tryb studiów: -
 Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Nazwa modułu: Roboty przemysłowe Rok akademicki: 2013/2014 Kod: RAR-1-604-s Punkty ECTS: 5 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Automatyka i Robotyka Specjalność: - Poziom studiów: Studia
Wymiar godzin Pkt Kod Nazwa przedmiotu Egz.
 PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
PLAN STUDIÓW STACJONARNYCH I-go STOPNIA (inżynierskich) NA WYDZIALE ELETROTECHNII, AUTOMATYI I INFORMATYI na kierunku AUTOMATYA I ROBOTYA Obowiązuje dla 1-go roku studiów w roku akademickim 2015/2016 I
ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR
 TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
TECHNIK MECHATRONIK ZESPÓŁ SZKÓŁ ELEKTRYCZNYCH NR 2 os. SZKOLNE 26 31-977 KRAKÓW www.elektryk2.i365.pl Spis treści: 1. Charakterystyka zawodu 3 2. Dlaczego technik mechatronik? 5 3. Jakie warunki musisz
Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne. Wykład Ćwiczenia
 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Automatyka i Robotyka Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne Rocznik: 2015/2016 Język wykładowy:
Robotyka i mechatronika
 Robotyka i mechatronika Literatura: Craig J. J.: Wprowadzenie do robotyki, WNT, Warszawa, 1995. Buratowski T. : Postawy robotyki, Uczelniane Wydawnictwa Naukowo-Techniczne, AGH, Kraków 2006 Istota mechatroniki
Robotyka i mechatronika Literatura: Craig J. J.: Wprowadzenie do robotyki, WNT, Warszawa, 1995. Buratowski T. : Postawy robotyki, Uczelniane Wydawnictwa Naukowo-Techniczne, AGH, Kraków 2006 Istota mechatroniki
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka. semestralny wymiar godzin. Semestr 1. Semestr 2. Semestr 3.
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
2012/2013. PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki
 PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2012/2013 Opole, styczeń 2013 r. Tekst jednolity po zmianach
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
Nazwa przedmiotu: Kierunek: Inżynieria Biomedyczna Rodzaj przedmiotu: obowiązkowy moduł kierunkowy ogólny Rodzaj zajęć: wykład, laboratorium PODSTAWY ROBOTYKI Fundamentals of Robotics Forma studiów: studia
Wprowadzenie do robotyki
 Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterowanych komputerowo urządzeń mechanicznych popularnie zwanych robotami. Robot urządzenie mechaniczne, które
Systemy Robotów Autonomicznych
 Systemy Robotów Autonomicznych Wykład nr 1 Zasady organizacji zajęć i uzyskiwania zaliczenia Kraków, 30.09.2017 dr inż. Andrzej Opaliński andrzej.opalinski @ agh.edu.pl Wszystkie informacje i aktualności
Systemy Robotów Autonomicznych Wykład nr 1 Zasady organizacji zajęć i uzyskiwania zaliczenia Kraków, 30.09.2017 dr inż. Andrzej Opaliński andrzej.opalinski @ agh.edu.pl Wszystkie informacje i aktualności
WYDZIAŁ INFORMATYKI POLITECHNIKI POZNAŃSKIEJ
 WYDZIAŁ INFORMATYKI POLITECHNIKI POZNAŃSKIEJ HISTORIA 1995 uruchomienie kierunku Informatyka na WE 2001 powstanie Wydziału Informatyki i Zarządzania 2001 uruchomienie makrokierunku Automatyka i zarządzanie
WYDZIAŁ INFORMATYKI POLITECHNIKI POZNAŃSKIEJ HISTORIA 1995 uruchomienie kierunku Informatyka na WE 2001 powstanie Wydziału Informatyki i Zarządzania 2001 uruchomienie makrokierunku Automatyka i zarządzanie
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy w ramach treści kierunkowych, moduł kierunkowy oólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: obowiązkowy w ramach treści kierunkowych, moduł kierunkowy oólny Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
MiA_cz.5. Czynniki techniczne rozwoju robotyki
 MiA_cz.5 Roboty przemysłowe i mobilne www.robotyka.com/teoria_spis.php 1 Czynniki techniczne rozwoju robotyki Rozwój technologii produkcyjnych i konstrukcyjnych, dzięki którym produkcja robotów stała się
MiA_cz.5 Roboty przemysłowe i mobilne www.robotyka.com/teoria_spis.php 1 Czynniki techniczne rozwoju robotyki Rozwój technologii produkcyjnych i konstrukcyjnych, dzięki którym produkcja robotów stała się
Katedra Systemów Decyzyjnych. Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl
 Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Katedra Systemów Decyzyjnych Kierownik: prof. dr hab. inż. Zdzisław Kowalczuk ksd@eti.pg.gda.pl 2010 Kadra KSD profesor zwyczajny 6 adiunktów, w tym 1 z habilitacją 4 asystentów 7 doktorantów Wydział Elektroniki,
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH CATIA I MATLAB MODEL OF SERIAL MANIPULATOR IN CATIA AND MATLAB
 Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
Kocurek Łukasz, mgr inż. email: kocurek.lukasz@gmail.com Góra Marta, dr inż. email: mgora@mech.pk.edu.pl Politechnika Krakowska, Wydział Mechaniczny MODEL MANIPULATORA O STRUKTURZE SZEREGOWEJ W PROGRAMACH
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium, projekt I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej
 Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej Instytut Sterowania i Elektroniki Przemysłowej - ISEP Zakład Elektroniki Przemysłowej
Specjalność Elektronika Przemysłowa w ramach kierunku Elektrotechnika na Wydziale Elektrycznym Politechniki Warszawskiej Instytut Sterowania i Elektroniki Przemysłowej - ISEP Zakład Elektroniki Przemysłowej
Egzamin / zaliczenie na ocenę*
 Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Zał. nr 4 do ZW /01 WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : AUTOMATYKA I ROBOTYKA Nazwa w języku angielskim: AUTOMATION AND ROBOTICS Kierunek studiów (jeśli dotyczy):
Załącznik 2 Tabela odniesień efektów kierunkowych do efektów obszarowych
 Załącznik 2 Tabela odniesień efektów kierunkowych do efektów obszarowych Tabela odniesień efektów kierunkowych do efektów obszarowych (tabele odniesień efektów kształcenia) Nazwa kierunku studiów: Automatyka
Załącznik 2 Tabela odniesień efektów kierunkowych do efektów obszarowych Tabela odniesień efektów kierunkowych do efektów obszarowych (tabele odniesień efektów kształcenia) Nazwa kierunku studiów: Automatyka
PRACA DYPLOMOWA MAGISTERSKA
 KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
KATEDRA WYTRZYMAŁOSCI MATERIAŁÓW I METOD KOMPUTEROWYCH MACHANIKI PRACA DYPLOMOWA MAGISTERSKA Analiza kinematyki robota mobilnego z wykorzystaniem MSC.VisualNastran PROMOTOR Prof. dr hab. inż. Tadeusz Burczyński
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki.
 PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2014/2015 Opole, marzec 2014 r. Tekst jednolity po zmianach
PLANY STUDIÓW stacjonarnych i niestacjonarnych I-go stopnia prowadzonych na Wydziale Elektrotechniki, Automatyki i Informatyki rok akademicki 2014/2015 Opole, marzec 2014 r. Tekst jednolity po zmianach
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Podstawy robotyki. Studia stacjonarne, AiR, II rok. Bartosz Kuczewski. PWSZ Gªogów, 2010
 Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
Studia stacjonarne, AiR, II rok PWSZ Gªogów, 2010 Czym si b dziemy zajmowa? Wprowadzenie Tradycyjne metody opisu i analizy manipulatorów robotów transformaty homogeniczne metody opisu kinematyki manipulatorów
studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1
 Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
Dlaczego warto podjąć studia na WETI PG na kierunku automatyka i robotyka Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej 1 Automatyka i robotyka Konkurs punktów: język polski
I. KARTA PRZEDMIOTU CEL PRZEDMIOTU
 I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
I. KARTA PRZEDMIOTU 1. Nazwa przedmiotu: ROBOTYKA 3 2. Kod przedmiotu: Ro3 3. Jednostka prowadząca: Wydział Mechaniczno-Elektryczny 4. Kierunek: Automatyka i Robotyka 5. Specjalność: Informatyka Stosowana
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne ZAL
Plan studiów na kierunku: MECHATRONIKA
 Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
Plan studiów na kierunku: MECHATRONIKA Rok studiów I Katedra LUB przedmiotu ECTS udziałem praca ECTS EGZ obligatoryjny (O) godzin Razem godzin w tym: zajęcia zorganizowane ZEWN Przedmiot akademckiego praktyczne
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim
 PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
PROGRAM KSZTAŁCENIA dla kierunku automatyka i robotyka studiów pierwszego stopnia o profilu ogólnoakademickim Program kształcenia dla określonego kierunku, poziomu studiów i profilu kształcenia obejmuje
SPECJALNOŚĆ ELEKTRONIKA PRZEMYSŁOWA
 SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
SPECJALNOŚĆ W RAMACH STUDIÓW STACJONARNYCH NA KIERUNKU ELEKTROTECHNIKA NA WYDZIALE ELEKTRYCZNYM POLITECHNIKI WARSZAWSKIEJ Instytut Sterowania i Elektroniki Przemysłowej Zakład Elektroniki Przemysłowej
S Y L A B U S P R Z E D M I O T U. Roboty przemysłowe
 "Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu:
"Z A T W I E R D Z A M Prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu:
S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE
 KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
KATEDRA SYSTEMÓW DECYZYJNYCH POLITECHNIKA GDA N SKA S PECJALNO S C I NTELIGENTNE S YSTEMY D ECYZYJNE prof. dr hab. inz. Zdzisław Kowalczuk Katedra Systemów Decyzyjnych Wydział Elektroniki Telekomunikacji
Plan studiów kierunku MECHANIKA I BUDOWA MASZYN
 bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
bezpośrednim udziałem a zajęcia Rok studiów I akademickiego lub j osoby prowadzącej zajęcia Technologie informacyjne w inżynierii I 2 1,2 0,8 0,6 ZAL OC O 30 14 16 16 1 KBEPiM 2. Przedmioty humanistyczne
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR
 Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Tematy prac dyplomowych inżynierskich realizacja semestr zimowy 2016 kierunek AiR Lp. Temat Cel Zakres Prowadzący 01/I8/ARi/16/Z Program sterujący automatycznym Celem pracy jest nabycie Praca obejmuje
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Systemy inteligentne Rok akademicki: 2013/2014 Kod: RME-2-108-SI-s Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Systemy inteligentne Poziom
Nazwa modułu: Systemy inteligentne Rok akademicki: 2013/2014 Kod: RME-2-108-SI-s Punkty ECTS: 7 Wydział: Inżynierii Mechanicznej i Robotyki Kierunek: Mechatronika Specjalność: Systemy inteligentne Poziom
KARTA OPISU MODUŁU KSZTAŁCENIA
 Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Sterowanie robotów mobilnych Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki 1 /
Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Sterowanie robotów mobilnych Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki 1 /
Mechatronika Uniwersytet Rzeszowski
 Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Mechatronika Uniwersytet Rzeszowski Plan studiów inżynierskich STUDIA INŻYNIERKSIE (7 semestrów) Studia stacjonarne i niestacjonarne Specjalności: Projektowanie systemów mechatronicznych Systemy wbudowane
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu:
 Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
Kształcenie w Szkole Doktorskiej Politechniki Białostockiej realizowane będzie według następującego programu: Semestr 1 2 3 4 Rodzaj Forma Forma Liczba zajęć zajęć zaliczeń godzin Szkolenie biblioteczne
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Nazwa przedmiotu: CHWYTAKI, NAPĘDY I CZUJNIKI URZĄDZEŃ MECHATRONICZNYCH Grippers, driver and sensors of mechatronic devices Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY
Tabela odniesień efektów kierunkowych do efektów obszarowych
 Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Umiejscowienie kierunku w obszarze kształcenia Kierunek automatyka i robotyka należy do obszaru kształcenia w zakresie nauk technicznych i jest powiązany z takimi kierunkami studiów jak: mechanika i budowa
Podstawy robotyki wykład III. Kinematyka manipulatora
 Podstawy robotyki Wykład III sztywnego Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Manipulator typu PUMA ogniwo 2 ogniwo 3 ogniwo 1 PUMA układy
Podstawy robotyki Wykład III sztywnego Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Manipulator typu PUMA ogniwo 2 ogniwo 3 ogniwo 1 PUMA układy
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Automatyka i Robotyka studia stacjonarne drugiego stopnia
 #384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
#384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA
 PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PRZEDMIOTY STUDIÓW STACJONARNYCH II STOPNIA Tabela 1-1 Matematyka - Metody numeryczne 30 15 4 2a 2b Teoria sterowania (kierunek AUTOMATYKA i ROBOTYKA) Systemy mikroprocesorowe w mechatronice (kierunek
PROBLEMY i PYTANIA KIERUNKOWE wspólne dla wszystkich specjalności.
 PYTANIA NA EGZAMIN DYPLOMOWY Kierunek: TRANSPORT Studia Stacjonarne, Stopień II. PROBLEMY i PYTANIA KIERUNKOWE wspólne dla wszystkich specjalności. Lp Problemy i Pytania 1 Zasady podejmowania i wykonywania
PYTANIA NA EGZAMIN DYPLOMOWY Kierunek: TRANSPORT Studia Stacjonarne, Stopień II. PROBLEMY i PYTANIA KIERUNKOWE wspólne dla wszystkich specjalności. Lp Problemy i Pytania 1 Zasady podejmowania i wykonywania
HARMONOGRAM EGZAMINÓW
 Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
Kierunek: MECHANIKA I BUDOWA MASZYN - studia I stopnia Materiałoznawstwo Analiza matematyczna Termodynamika techniczna 2 Cały rok Mechanika II Wytrzymałość materiałów Spawalnictwo Technologia spawania
Informacje ogólne. ABS ESP ASR Wspomaganie układu kierowniczego Aktywne zawieszenie Inteligentne światła Inteligentne wycieraczki
 Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Mechatronika w środkach transportu Informacje ogólne Celem kształcenia na profilu dyplomowania Mechatronika w środkach transportu jest przekazanie wiedzy z zakresu budowy, projektowania, diagnostyki i
Automatyka i robotyka
 PAŃSTWOWA WYŻSZA SZKOŁA INFORMATYKI I PRZEDSIĘBIORCZOŚCI W ŁOMŻY 18-400 Łomża; ul. Akademicka 14 ; tel: +48 /86/ 215 59 50; fax: 215 66 00 e-mail: rektorat@pwsip.edu.pl http://www.pwsip.edu.pl; Program
PAŃSTWOWA WYŻSZA SZKOŁA INFORMATYKI I PRZEDSIĘBIORCZOŚCI W ŁOMŻY 18-400 Łomża; ul. Akademicka 14 ; tel: +48 /86/ 215 59 50; fax: 215 66 00 e-mail: rektorat@pwsip.edu.pl http://www.pwsip.edu.pl; Program
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML
 Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Sztuczna inteligencja i uczenie maszynowe w robotyce i systemach autonomicznych: AI/ML w robotyce, robotyka w AI/ML Piotr Skrzypczyński Instytut Automatyki, Robotyki i Inżynierii Informatycznej, Politechnika
Odniesienie do obszarowych efektów kształcenia 1 2 3. Kierunkowe efekty kształcenia WIEDZA (W)
") EFEKTY KSZTAŁCENIA NA KIERUNKU "MECHATRONIKA" nazwa kierunku studiów: Mechatronika poziom kształcenia: studia pierwszego stopnia profil kształcenia: ogólnoakademicki symbol kierunkowych efektów kształcenia
EFEKTY KSZTAŁCENIA NA KIERUNKU "MECHATRONIKA" nazwa kierunku studiów: Mechatronika poziom kształcenia: studia pierwszego stopnia profil kształcenia: ogólnoakademicki symbol kierunkowych efektów kształcenia
Automatyka i metrologia
 Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
PLAN STUDIÓW NIESTACJONARNYCH I-go stopnia dla kierunku Mechanika i Budowa Maszyn Etap podstawowy
 ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
ydział Mechaniczny 06.1-M-MiBM-N1-EP-000_13 Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S Ć L P/S 441 60 rupa Treści Podstawowych 1. ykład monograficzny 36 2 18 1 18 1 2. Język obcy I* 36 4 18 2 18 2
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
Szkoła Młodego Inżyniera - OFERTA
 2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
2010 Szkoła Młodego Inżyniera - OFERTA RoboNET Wspólnie zmieniamy edukację w Polsce! IDEA ZAJĘĆ ROBOCAMP RoboCAMP to zajęcia, podczas których dzieci w wieku od 8 do 14 lat poznają tajniki robotyki i programowania,
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010
 Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010 Wstęp 1. Rozwój robotyki 1.1. Rys historyczny rozwoju robotyki 1.2. Dane statystyczne ilustrujące rozwój robotyki przemysłowej
Roboty przemysłowe. Budowa i zastosowanie, wyd, 2 Honczarenko Jerzy WNT 2010 Wstęp 1. Rozwój robotyki 1.1. Rys historyczny rozwoju robotyki 1.2. Dane statystyczne ilustrujące rozwój robotyki przemysłowej
Technik Mechatronik. Kliknij, aby dodać tekst
 Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Historia sztucznej inteligencji. Przygotował: Konrad Słoniewski
 Historia sztucznej inteligencji Przygotował: Konrad Słoniewski Prahistoria Mit o Pigmalionie Pandora ulepiona z gliny Talos olbrzym z brązu Starożytna Grecja System sylogizmów Arystotelesa (VI w. p.n.e.)
Historia sztucznej inteligencji Przygotował: Konrad Słoniewski Prahistoria Mit o Pigmalionie Pandora ulepiona z gliny Talos olbrzym z brązu Starożytna Grecja System sylogizmów Arystotelesa (VI w. p.n.e.)
Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat
 Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
Wakacje dla dzieci 2012 Łódź 30 lipca 3 sierpnia 6 sierpnia - 10 sierpnia Wakacje z robotami RoboCAMP Opis zajęć dla dzieci w wieku 9-14 lat Uniwersytet Łódzki i RoboNET - Wspólnie zmieniamy edukację w
KIERUNKI I SPECJALNOŚCI
 KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
KIERUNKI I SPECJALNOŚCI STUDIA NIESTACJONARNE PROWADZONE W WARSZAWIE Administacji i Nauk Społecznych Kierunek ADMINISTRCAJA Czas trwania 6 semestrów 4 semestry Specjalności Bez specjalności Bez specjalności
ZASTOSOWANIE METOD PRZETWARZANIA I ANALIZY OBRAZU W OPTYMALIZACJI RÓWNAŃ RUCHU CZTERONOŻNEGO ROBOTA KROCZĄCEGO
 ZASTOSOWANIE METOD PRZETWARZANIA I ANALIZY OBRAZU W OPTYMALIZACJI RÓWNAŃ RUCHU CZTERONOŻNEGO ROBOTA KROCZĄCEGO Katarzyna Gospodarek Instytut Informatyki Teoretycznej i stosowanej, Politechnika Częstochowska
ZASTOSOWANIE METOD PRZETWARZANIA I ANALIZY OBRAZU W OPTYMALIZACJI RÓWNAŃ RUCHU CZTERONOŻNEGO ROBOTA KROCZĄCEGO Katarzyna Gospodarek Instytut Informatyki Teoretycznej i stosowanej, Politechnika Częstochowska