Zagadnienia porz dkowe Wprowadzenie do robotyki mobilnej Modelowanie robotów koªowych. Robotyka mobilna. Wykªad 1.
|
|
|
- Marcin Kwiecień
- 9 lat temu
- Przeglądów:
Transkrypt
1 Robotyka mobilna Wykªad Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 2 pa¹dziernika 2011

2 Prowadz cy wykªad: p. 419 EL, tel , Zasady zaliczenia wykªadu: Ocena ko«cowa jest ±redni wa»on oceny egzaminu pisemnego (2/3) i oceny z laboratorium (1/3). Warunkiem podej±cia do egzaminu jest pozytywna ocena z zaj laboratoryjnych. Gªówne zagadnienia poruszane na wykªadzie: Klasykacja i rodzaje robotów mobilnych Opis matematyczny kinematyki i dynamiki nieholonomicznych robotów koªowych Techniki sterowania ruchem nieholonomicznych koªowych robotów Wybrane metody lokalizacji i nawigacji robotów mobilnych Literatura: Tcho«, Mazur, Hossa, Dul ba, Manipulatory i roboty mobilne, Akademia Ocyna Wydawnicza PLJ, G. Campion, G. Bastin, B. D'Andrea-Novel, Structural Properties and Classication of Kinematic and Dynamic Models of Wheeled Mobile Robots, IEEE TRansactions on Robotics and Automation, Vol. 12, No. 1, February J. Borenstein (edytor), Where am I - Systems and Methods for Mobile Robot Positioning, B. Siciliano, L. Sciavicco, L. Villani, G. Oriolo, Robotics: Modelling, Planning and Control, Springer B. Siciliano, O. Khatib (Ed.), Handbook of Robotics, Springer P. Skrzypczy«ski, Metody analizy i redukcji niepewnosci percepcji w systemie nawigacji robota mobilnego, Rozprawy, nr 407, Wydawnictwo Politechniki Pozna«skiej, Poznan 2007.

3 Spis tre±ci 1 Zagadnienia porz dkowe 2 3
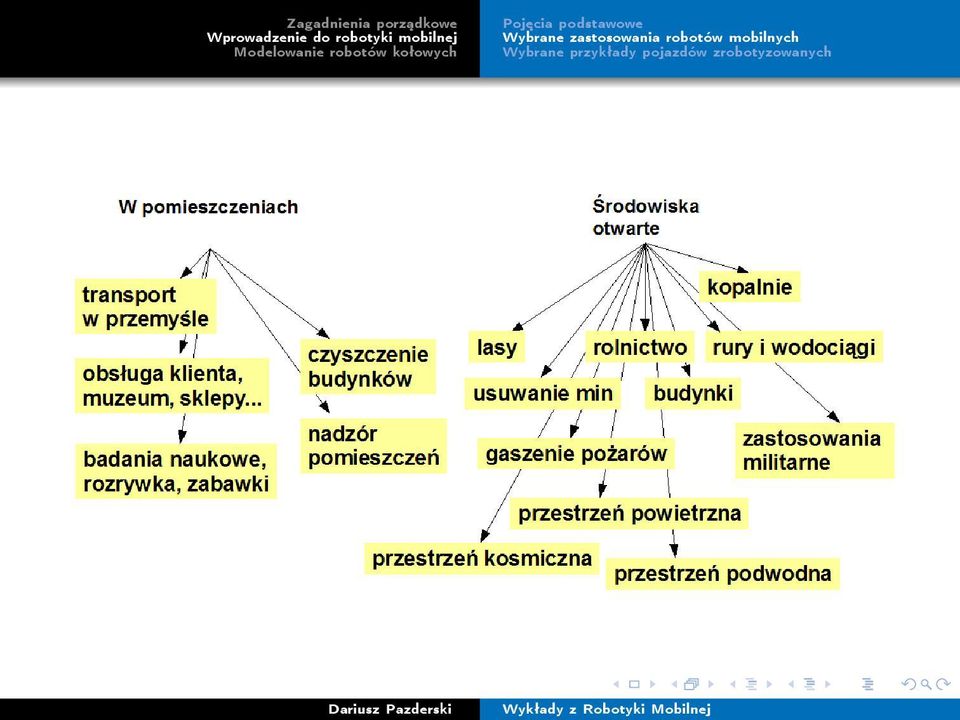
4 Robot mobilny jest rodzajem robota, którego podstawow funkcj jest przemieszczanie si wzgl dem otoczenia (lokomocja), a ukªad wykonawczy tego robota jest ukªadem lokomocyjnym. Robot mobilny autonomiczny wykonuje swoje zadanie bez zewn trznego wsparcia ze strony czªowieka. Podstawow wªa±ciwo±ci takiego robota jest zdolno± do samodzielnego tworzenia i wykonywania planów dziaªania na podstawie obserwacji otoczenia. Klasykacja robotów mobilnych: naziemne (ruch pªaski lub w przestrzeni 3D), wodne (ruch pªaski lub w przestrzeni 3D), lataj ce, kosmiczne, itd. Ukªady lokomocyjne robotów naziemnych: koªowe, g sienicowe, krocz ce (skacz ce)
, wodne (ruch pªaski lub w przestrzeni 3D), lataj ce, kosmiczne, itd.")

5 Rysunek: Schemat ukªadu sterowania robota mobilnego (interakcja robot-±rodowisko)

6 Spis tre±ci 1 Zagadnienia porz dkowe 2 3

7
8 Spis tre±ci 1 Zagadnienia porz dkowe 2 3

9 Robot przemysªowy typu Automated Guided Vehicle (AGV) Rysunek: Systemy transportowe AVG ( naprowadzane za pomoc linii indukcyjnej lub optycznej
 naprowadzane za pomoc linii")

10 Robot transportowy w obiektach u»yteczno±ci publicznej Rysunek: Robot do transportu w szpitalach TUG (


11 Zagadnienia porz dkowe Robot do utrzymania czysto±ci pomieszcze«rysunek: Roboty sprz taj ce i myj ce rmy irobot (

 oraz robot policyjny Inspector (http://www.")
12 Robot inspekcyjny Rysunek: Robot do inspekcji kraterów wulkanicznych Robovolc ( oraz robot policyjny Inspector (
 oraz robot policyjny Inspector")
 wykorzystywany do badania dna morskiego.")
13 Robot podwodny typu Remotely Operated Underwater Vehicle (ROV) Rysunek: ROV Tiburon ( wykorzystywany do badania dna morskiego. Posiada zdolno± do automatycznego utrzymywania zadanej odlegªo±ci od dna.
 wykorzystywany do badania dna morskiego.")
 - wykorzystywane przez wojsko USA do celów zwiadowczych.")
14 Robot lataj cy typu Unmanned Areial Vehicle (UAV) ` Rysunek: Bezzaªogowe samoloty Predator ( - wykorzystywane przez wojsko USA do celów zwiadowczych. Nawigacja oparta o GPS oraz moduªy inercyjne.


15 Robot do bada«kosmicznych Rysunek: Rover Sojourner (eksploracja Marsa) pracowaª w trybie teleoperacji. Dodatkowo posiadaª sensory, które wspomagaªy unikanie kolizji (

16 Najnowsze rozwi zania i technologie Ilustracja najnowszych osi gni technicznych na przykªadzie rmy komercyjnej Boston Dynamics: RHex - robot z niekonwencjonaln struktur nap dow Little Dog - niewielki laboratoryjny robot czterono»ny do badania strategii chodu (statycznie stabilnego) RiSE - robot wspinaj cy si Big Dog - zaawansowana konstrukcja studyjna (w zaªo»eniu - wdro»enie) robota czterono»nego... (
 robota czterono»nego... (www.")
17 Spis tre±ci Zagadnienia porz dkowe 1 Zagadnienia porz dkowe 2 3

18 l Rysunek: Koªo tocz ce si bez po±lizgu na pªaszczy¹nie

19 Rozwa»ymy opis pªaski kinematyki pojedynczego koªa tocz ce si bez po±lizgu wzdªu»nego i poprzecznego. Zakªadamy,»e orientacja ukªadu wózka wzgl dem ukªadu podstawowego X g Y g wynosi θ, wspóªrz dne punktu A, w którym zamocowane jest koªo s staªe w ukªadzie lokalnym wózka x l y l i wynosz p l A [lcosα lsinα]t. Ukªad lokalny x k y k zwi zany z koªem, którego pocz tek znajduje si w punkcie B (w ±rodku koªa) mo»e zmienia orientacj wzgl dem ukªadu lokalnego wózka o k t γ.
![zamocowane jest koªo s staªe w ukªadzie lokalnym wózka x l y l i wynosz p l A [lcosα lsinα]t.](/docs-images/41/2025524/images/page_19.jpg "Ukªad lokalny x k y k zwi zany z koªem, którego pocz tek znajduje si w punkcie B (w ±rodku koªa) mo»e zmienia")
20 Wspóªrz dne punktu B wyra»one w ukªadzie lokalnym wózka wynosz : natomiast w ukªadzie globalnym: p l B = p l A + R(α + γ)pk B, (1) p B = p + R(θ)p l B. (2) Obliczaj c pr dko± punktu B w ukªadzie globalnym mamy: przy czym ṗp l B = RT (α+γ) (α+γ) koªa otrzymujemy ṗp B = ṗp + R(θ) θ p l B + R(θ)ṗp l B, (3) p k B γ. Wyra»aj c pr dko± punktu B w ukªadzie v B ṗp k B = R T (θ + α + γ)ṗp B. (4)
 θ p l B + R(θ)ṗp l B, (3) p k B γ.")
21 Poniewa» obroty o k t α, γ oraz θ realizowane s wokóª tej samej osi prostopadªej do pªaszczyzny ruchu, kolejno± rotacji nie ma znaczenia. St d równanie (4) mo»na przedstawi w postaci nast puj cej: v B ṗp k B = R T (α + γ)r T (θ)ṗp B. (5) Po uwzgl dnieniu równania (3) wynikiem operacji R T (θ)ṗp B jest: R T (θ)ṗp B = R T (θ)ṗp J p l B θ + ṗp l B, (6) gdzie J [ ] so(2) jest macierz sko±nie symetryczn. St d co ostatecznie daje wynik v = R T (α + γ) ( R T (θ)ṗp J p l B θ + ṗp l B), (7) v B = R T (α + γ)r T (θ)ṗp + [ ] lsinγ lcosγ + d [ ] 0 θ + γ. (8) d
22 v By Uwzgl dniaj c brak po±lizgu wzdªu»nego i poprzecznego mo»emy zapisa [ ] [ ] vbx r ϕ v B = =, (9) 0 gdzie ϕ jest pr dko±ci k tow koªa natomiast r jego promieniem. Uwzgl dniaj c zaªo»enie (9) w równaniu (8) otrzymujemy dwa ograniczenia fazowe: R T (α + γ)r T (θ)ṗp + [ ] lsinγ lcosγ + d [ ] 0 θ + γ d które mo»na przedstawi w postaci liniowych ogranicze«pfaa: [ ] r ϕ = 0, (10) 0 A( q) q = 0, (11) gdzie [ A( q) = lsinγ lcosγ + d R T (α + γ)r T (θ) 0 d r 0 ] (12) jest macierz ogranicze«, natomiast
23 q jest caªkowit konguracj mechaniczn ukªadu wózka z koªem, zdeniowan jako: q [ q 1 q 2 q 3 q 4 q 5 ] T = [θ X Y γ ϕ] T = [ q T γ ϕ ] T, (13) przy czym q [θ X Y] T S 1 R 2 oznacza konguracj wózka w ruchu pªaskim (opisuje jego orientacj i pozycj ). Alternatywnie, macierz ogranicze«zapiszemy w postaci nast puj cej: [[ A( q) = lsinγ lcosγ + d [ ] gdzie R(θ) = R(θ) SO(3). ] R T (α + γ) R T (θ) 0 d r 0 ], (14)
24 Spis tre±ci Zagadnienia porz dkowe 1 Zagadnienia porz dkowe 2 3
25 B dziemy rozpatrywali trzy rodzaje kóª, w które wyposa»ony jest wózek: koªa typu f z osi ustalon, dla których k t γ = const, koªa typu c zamocowane centralnie, dla których d 0, natomiast konguracj okre±la k t γ, koªa typu oc zamocowanie niecentralnie nastawcze (typu kastor), których konguracj okre±la k t γ. Konguracj wózka, wyposa»onego w n kóª, przy czym n = n f + n c + n oc (indeksy odnosz si do typów kóª) okre±limy nast puj co: q = [ q T γ 1... γ nc γ 1... γ noc ϕ 1... ϕ n ] T S 1 R 2 T n c+n 0c +n. (15) Dla ka»dego z kóª zakªadamy speªnienie ogranicze«(11). W efekcie dla caªego ukªadu istnieje n ogranicze«wynikaj cych z braku po±lizgu wzdªu»nego i n ogranicze«wynikaj cych z braku po±lizgu poprzecznego. Mo»na je przedstawi w postaci Pfaa ĀA( q) q = 0, gdzie ĀA( q) [ J1 (γ c, γ oc ) R(θ) 0 J 2 C 1 (γ c, γ oc ) R(θ) C 2 0 ], (16)
26 przy czym J 1 (γ c, γ oc ) J 1f J 1c (γ c ), C 1 (γ c, γ oc ) C 1f 0 C 1c (γ c ), C 2 0. J 1oc (γ oc ) C 1oc (γ oc ) C 2oc (γ oc ) (17) Warunek braku po±lizgu poprzecznego mo»emy zapisa nast puj co: C 1 (γ c, γ oc ) R T (θ) q + C 2 γ oc = 0. (18) St d dla kóª ustalonych i zamocowanych centralnie (d 0) mamy: C 1f R T (θ) q = 0, C 1c (γ c ) R T (θ) q = 0 (19) lub [ ] gdzie C C1f 1 (γ c ). C 1c (γ c ) C 1 (γ c ) R T (θ) q = 0, (20)
27 Warunek braku po±lizgu poprzecznego Na podstawie równania (20) wnioskujemy,»e pr dko± wózka q musi le»e w przestrzeni zerowej macierzy C 1 (γ c ) R T (θ). W konsekwencji robot mo»e porusza si bez po±lizgu je»eli rankc 1 (γ c ) R T (θ) < 3. (21)
28 Miary kinematyki robotów koªowych Zdeniujmy: stopie«mobilno±ci: δ m dimn {C 1 (γ c )} = 3 rankc 1 (γ c ) stopie«sterowalno±ci: δ s rankc 1c (γ c ) Zrealizowa mo»na 5 ró»nych struktur kinematycznych takich,»e: δ m : 1 δ m 3 δ s : 0 δ m 2 2 δ m + δ s 3 Kinematyk koªowego robota mobilnego poruszaj cego si na pªaszczy¹nie bez po±lizgu b dziemy charakteryzowali nast puj co: (δ m,δ s ).
29 Spis tre±ci Zagadnienia porz dkowe 1 Zagadnienia porz dkowe 2 3
30 Z uwagi na ograniczenia fazowe wiadomo,»e pr dko±ci uogólnione q le» w przestrzeni zerowej macierzy ĀA( q). Z tego wynika,»e mo»na znale¹ macierz G( q) oraz wektor u taki,»e q = G( q)u, (22) gdzie dim u = dim q rankāa( q) = m. Równanie (22) okre±la ukªad bezdryfowy, który nazwiemy caªkowit kinematyk robota mobilnego. Okre±laj c pr dko±ci samego wózka mo»emy rozwa»a posta zredukowan równania kinematyki : q = G (q, γ c )u. (23)
31 Spis tre±ci Zagadnienia porz dkowe 1 Zagadnienia porz dkowe 2 3
32 Dynamik robota mobilnego uwzgl dniaj c ograniczenia fazowe mo»na przedstawi w postaci nast puj cej: M ( q) q + C ( q, q) q + g( q) = B( q) τ +A T ( q) λ, (24) } {{ } Q A gdzie M ( q) okre±la macierz inercji, C ( q, q ) jest macierz opisuj c siªy od±rodkowe i Coriolisa, g( q) opisuje siªy grawitacji, B( q) jest macierz wej±cia, τ R m okre±la siªy (momenty) wej±ciowe, λ R n m jest wektorem mno»ników Lagrange'a. Skªadnik A T ( q) λ opisuje siªy ogranicze«fazowych.
33 Równanie (24) zawiera jawn posta siª ogranicze«fazowych. Wykorzystuj c równanie kinematyki (22) dynamik ukªadu z ograniczeniami fazowymi (w tym niecaªkowalnymi czyli nieholonomicznymi) mo»na przedstawi w postaci zredukowanej: M ( q) u + C ( q, u) u + ḡg( q) = B( q) τ, gdzie M ( q) = G T ( q) M ( q) G( q), C ( q, u) = G T ( q)c ( q, q ) G( q) + G T ( q) M ( q) dt d G( q), ḡg( q) = G T ( q) g( q) oraz B( q) = G T ( q) B( q). Siªy ogranicze«mo»na okre±li na podstawie zale»no±ci nast puj cej: λ = ( A( q) M 1 ( q) A T ( q) ) ( 1 d +A( q) M 1 ( q) dt A( q) q + (25) ( C ( q, q) )) q + g( q) B( q) τ. (26)
34 Spis tre±ci Zagadnienia porz dkowe 1 Zagadnienia porz dkowe 2 3
35 Robot dwukoªowy klasy (2,0) A A2 2 Rysunek: Struktura robota z nap dem ró»nicowym
36 Robot typu samochód klasy (1,1) A A3 A2 2 Rysunek: Struktura robota z nap dem samochodowym
Metody numeryczne i statystyka dla in»ynierów
 Kierunek: Automatyka i Robotyka, II rok Wprowadzenie PWSZ Gªogów, 2009 Plan wykªadów Wprowadzenie, podanie zagadnie«, poj cie metody numerycznej i algorytmu numerycznego, obszar zainteresowa«i stosowalno±ci
Kierunek: Automatyka i Robotyka, II rok Wprowadzenie PWSZ Gªogów, 2009 Plan wykªadów Wprowadzenie, podanie zagadnie«, poj cie metody numerycznej i algorytmu numerycznego, obszar zainteresowa«i stosowalno±ci
Temat 1. Wprowadzenie do nawigacji robotów mobilnych. Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera
 Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1 Wprowadzenie do nawigacji robotów mobilnych 1 Pojęcia podstawowe Dariusz Pazderski Opracowanie w ramach programu ERA Inżyniera Na początku wprowadzimy
Modele wielorównaniowe. Problem identykacji
 Modele wielorównaniowe. Problem identykacji Ekonometria Szeregów Czasowych SGH Identykacja 1 / 43 Plan wykªadu 1 Wprowadzenie 2 Trzy przykªady 3 Przykªady: interpretacja 4 Warunki identykowalno±ci 5 Restrykcje
Modele wielorównaniowe. Problem identykacji Ekonometria Szeregów Czasowych SGH Identykacja 1 / 43 Plan wykªadu 1 Wprowadzenie 2 Trzy przykªady 3 Przykªady: interpretacja 4 Warunki identykowalno±ci 5 Restrykcje
det A := a 11, ( 1) 1+j a 1j det A 1j, a 11 a 12 a 21 a 22 Wn. 1 (Wyznacznik macierzy stopnia 2:). = a 11a 22 a 33 +a 12 a 23 a 31 +a 13 a 21 a 32
 1+j a 1j det A 1j, a 11 a 12 a 21 a 22 Wn. 1 (Wyznacznik macierzy stopnia 2:). = a 11a 22 a 33 +a 12 a 23 a 31 +a 13 a 21 a 32") Wyznacznik Def Wyznacznikiem macierzy kwadratowej nazywamy funkcj, która ka»dej macierzy A = (a ij ) przyporz dkowuje liczb det A zgodnie z nast puj cym schematem indukcyjnym: Dla macierzy A = (a ) stopnia
Wyznacznik Def Wyznacznikiem macierzy kwadratowej nazywamy funkcj, która ka»dej macierzy A = (a ij ) przyporz dkowuje liczb det A zgodnie z nast puj cym schematem indukcyjnym: Dla macierzy A = (a ) stopnia
Matematyka wykªad 1. Macierze (1) Andrzej Torój. 17 wrze±nia 2011. Wy»sza Szkoªa Zarz dzania i Prawa im. H. Chodkowskiej
 Andrzej Torój. 17 wrze±nia 2011. Wy»sza Szkoªa Zarz dzania i Prawa im. H. Chodkowskiej") Matematyka wykªad 1 Macierze (1) Andrzej Torój Wy»sza Szkoªa Zarz dzania i Prawa im. H. Chodkowskiej 17 wrze±nia 2011 Plan wykªadu 1 2 3 4 5 Plan prezentacji 1 2 3 4 5 Kontakt moja strona internetowa:
Matematyka wykªad 1 Macierze (1) Andrzej Torój Wy»sza Szkoªa Zarz dzania i Prawa im. H. Chodkowskiej 17 wrze±nia 2011 Plan wykªadu 1 2 3 4 5 Plan prezentacji 1 2 3 4 5 Kontakt moja strona internetowa:
Opis matematyczny ukªadów liniowych
 Rozdziaª 1 Opis matematyczny ukªadów liniowych Autorzy: Alicja Golnik 1.1 Formy opisu ukªadów dynamicznych 1.1.1 Liniowe równanie ró»niczkowe Podstawow metod przedstawienia procesu dynamicznego jest zbiór
Rozdziaª 1 Opis matematyczny ukªadów liniowych Autorzy: Alicja Golnik 1.1 Formy opisu ukªadów dynamicznych 1.1.1 Liniowe równanie ró»niczkowe Podstawow metod przedstawienia procesu dynamicznego jest zbiór
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
Elementy geometrii w przestrzeni R 3
 Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
Elementy geometrii w przestrzeni R 3 Z.Šagodowski Politechnika Lubelska 29 maja 2016 Podstawowe denicje Wektorem nazywamy uporz dkowan par punktów (A,B) z których pierwszy nazywa si pocz tkiem a drugi
Wykªad 10. Spis tre±ci. 1 Niesko«czona studnia potencjaªu. Fizyka 2 (Informatyka - EEIiA 2006/07) c Mariusz Krasi«ski 2007
 c Mariusz Krasi«ski 2007") Wykªad 10 Fizyka 2 (Informatyka - EEIiA 2006/07) 08 05 2007 c Mariusz Krasi«ski 2007 Spis tre±ci 1 Niesko«czona studnia potencjaªu 1 2 Laser 3 2.1 Emisja spontaniczna...........................................
Wykªad 10 Fizyka 2 (Informatyka - EEIiA 2006/07) 08 05 2007 c Mariusz Krasi«ski 2007 Spis tre±ci 1 Niesko«czona studnia potencjaªu 1 2 Laser 3 2.1 Emisja spontaniczna...........................................
ANALIZA NUMERYCZNA. Grzegorz Szkibiel. Wiosna 2014/15
 ANALIZA NUMERYCZNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Metoda Eulera 3 1.1 zagadnienia brzegowe....................... 3 1.2 Zastosowanie ró»niczki...................... 4 1.3 Output do pliku
ANALIZA NUMERYCZNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Metoda Eulera 3 1.1 zagadnienia brzegowe....................... 3 1.2 Zastosowanie ró»niczki...................... 4 1.3 Output do pliku
wiczenie nr 3 z przedmiotu Metody prognozowania kwiecie«2015 r. Metodyka bada«do±wiadczalnych dr hab. in». Sebastian Skoczypiec Cel wiczenia Zaªo»enia
 wiczenie nr 3 z przedmiotu Metody prognozowania kwiecie«2015 r. wiczenia 1 2 do wiczenia 3 4 Badanie do±wiadczalne 5 pomiarów 6 7 Cel Celem wiczenia jest zapoznanie studentów z etapami przygotowania i
wiczenie nr 3 z przedmiotu Metody prognozowania kwiecie«2015 r. wiczenia 1 2 do wiczenia 3 4 Badanie do±wiadczalne 5 pomiarów 6 7 Cel Celem wiczenia jest zapoznanie studentów z etapami przygotowania i
Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a).
.") Rozwi zania zada«z egzaminu podstawowego z Analizy matematycznej 2.3A (24/5). Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a). Zadanie P/4. Metod operatorow rozwi
Rozwi zania zada«z egzaminu podstawowego z Analizy matematycznej 2.3A (24/5). Rozwi zanie równania ró»niczkowego metod operatorow (zastosowanie transformaty Laplace'a). Zadanie P/4. Metod operatorow rozwi
Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach
 Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach Teoria obowi zuje z wykªadu, dlatego te» zostan tutaj przedstawione tylko podstawowe denicje, twierdzenia i wzory. Denicja 1. Równanie
Liniowe równania ró»niczkowe n tego rz du o staªych wspóªczynnikach Teoria obowi zuje z wykªadu, dlatego te» zostan tutaj przedstawione tylko podstawowe denicje, twierdzenia i wzory. Denicja 1. Równanie
Optyka geometryczna. Soczewki. Marcin S. Ma kowicz. rok szk. 2009/2010. Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku
 skupiaj ce rozpraszaj ce Optyka geometryczna Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku rok szk. 2009/2010 skupiaj ce rozpraszaj ce Spis tre±ci 1 Wprowadzenie 2 Ciekawostki 3 skupiaj ce Konstrukcja
skupiaj ce rozpraszaj ce Optyka geometryczna Zespóª Szkóª Ponadgimnazjalnych Nr 2 w Brzesku rok szk. 2009/2010 skupiaj ce rozpraszaj ce Spis tre±ci 1 Wprowadzenie 2 Ciekawostki 3 skupiaj ce Konstrukcja
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
1 Trochoidalny selektor elektronów
 1 Trochoidalny selektor elektronów W trochoidalnym selektorze elektronów TEM (Trochoidal Electron Monochromator) stosuje si skrzy»owane i jednorodne pola: elektryczne i magnetyczne. Jako pierwsi taki ukªad
1 Trochoidalny selektor elektronów W trochoidalnym selektorze elektronów TEM (Trochoidal Electron Monochromator) stosuje si skrzy»owane i jednorodne pola: elektryczne i magnetyczne. Jako pierwsi taki ukªad
CAŠKOWANIE METODAMI MONTE CARLO Janusz Adamowski
 III. CAŠKOWAIE METODAMI MOTE CARLO Janusz Adamowski 1 1 azwa metody Podstawowym zastosowaniem w zyce metody Monte Carlo (MC) jest opis zªo-»onych ukªadów zycznych o du»ej liczbie stopni swobody. Opis zªo»onych
III. CAŠKOWAIE METODAMI MOTE CARLO Janusz Adamowski 1 1 azwa metody Podstawowym zastosowaniem w zyce metody Monte Carlo (MC) jest opis zªo-»onych ukªadów zycznych o du»ej liczbie stopni swobody. Opis zªo»onych
Rys.2 N = H (N cos = N) : (1) H y = q x2. y = q x2 2 H : (3) Warto± siªy H, która mo»e by uto»samiana z siª naci gu kabla, jest równa: z (3) przy
 : (1) H y = q x2. y = q x2 2 H : (3) Warto± siªy H, która mo»e by uto»samiana z siª naci gu kabla, jest równa: z (3) przy") XXXV OLIMPIADA WIEDZY TECHNICZNEJ Zawody III stopnia Rozwi zania zada«dla grupy mechaniczno-budowlanej Rozwi zanie zadania Tzw. maªy zwis, a wi c cos. W zwi zku z tym mo»na przyj,»e Rys. N H (N cos N)
XXXV OLIMPIADA WIEDZY TECHNICZNEJ Zawody III stopnia Rozwi zania zada«dla grupy mechaniczno-budowlanej Rozwi zanie zadania Tzw. maªy zwis, a wi c cos. W zwi zku z tym mo»na przyj,»e Rys. N H (N cos N)
Makroekonomia Zaawansowana
 Makroekonomia Zaawansowana wiczenia 1 Stan ustalony i log-linearyzacja MZ 1 / 27 Plan wicze«1 Praca z modelami DSGE 2 Stan ustalony 3 Log-linearyzacja 4 Zadania MZ 2 / 27 Plan prezentacji 1 Praca z modelami
Makroekonomia Zaawansowana wiczenia 1 Stan ustalony i log-linearyzacja MZ 1 / 27 Plan wicze«1 Praca z modelami DSGE 2 Stan ustalony 3 Log-linearyzacja 4 Zadania MZ 2 / 27 Plan prezentacji 1 Praca z modelami
x y x y x y x + y x y
 Algebra logiki 1 W zbiorze {0, 1} okre±lamy dziaªania dwuargumentowe,, +, oraz dziaªanie jednoargumentowe ( ). Dziaªanie x + y nazywamy dodawaniem modulo 2, a dziaªanie x y nazywamy kresk Sheera. x x 0
Algebra logiki 1 W zbiorze {0, 1} okre±lamy dziaªania dwuargumentowe,, +, oraz dziaªanie jednoargumentowe ( ). Dziaªanie x + y nazywamy dodawaniem modulo 2, a dziaªanie x y nazywamy kresk Sheera. x x 0
Ukªady równa«liniowych
 dr Krzysztof yjewski Mechatronika; S-I 0 in» 7 listopada 206 Ukªady równa«liniowych Informacje pomocnicze Denicja Ogólna posta ukªadu m równa«liniowych z n niewiadomymi x, x, x n, gdzie m, n N jest nast
dr Krzysztof yjewski Mechatronika; S-I 0 in» 7 listopada 206 Ukªady równa«liniowych Informacje pomocnicze Denicja Ogólna posta ukªadu m równa«liniowych z n niewiadomymi x, x, x n, gdzie m, n N jest nast
Informacje pomocnicze
 Funkcje wymierne. Równania i nierówno±ci wymierne Denicja. (uªamki proste) Wyra»enia postaci Informacje pomocnicze A gdzie A d e R n N (dx e) n nazywamy uªamkami prostymi pierwszego rodzaju. Wyra»enia
Funkcje wymierne. Równania i nierówno±ci wymierne Denicja. (uªamki proste) Wyra»enia postaci Informacje pomocnicze A gdzie A d e R n N (dx e) n nazywamy uªamkami prostymi pierwszego rodzaju. Wyra»enia
2. L(a u) = al( u) dla dowolnych u U i a R. Uwaga 1. Warunki 1., 2. mo»na zast pi jednym warunkiem: L(a u + b v) = al( u) + bl( v)
 = al( u) dla dowolnych u U i a R. Uwaga 1. Warunki 1., 2. mo»na zast pi jednym warunkiem: L(a u + b v) = al( u) + bl( v)") Przeksztaªcenia liniowe Def 1 Przeksztaªceniem liniowym (homomorzmem liniowym) rzeczywistych przestrzeni liniowych U i V nazywamy dowoln funkcj L : U V speªniaj c warunki: 1 L( u + v) = L( u) + L( v) dla
Przeksztaªcenia liniowe Def 1 Przeksztaªceniem liniowym (homomorzmem liniowym) rzeczywistych przestrzeni liniowych U i V nazywamy dowoln funkcj L : U V speªniaj c warunki: 1 L( u + v) = L( u) + L( v) dla
Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 1
 Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 1 Tomasz Suchocki Uniwersytet Przyrodniczy we Wrocªawiu Katedra Genetyki i Ogólnej Hodowli Zwierz t Plan wykªadu 1 Podstawowe
Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 1 Tomasz Suchocki Uniwersytet Przyrodniczy we Wrocªawiu Katedra Genetyki i Ogólnej Hodowli Zwierz t Plan wykªadu 1 Podstawowe
Materiaªy do Repetytorium z matematyki
 Materiaªy do Repetytorium z matematyki 0/0 Dziaªania na liczbach wymiernych i niewymiernych wiczenie Obliczy + 4 + 4 5. ( + ) ( 4 + 4 5). ( : ) ( : 4) 4 5 6. 7. { [ 7 4 ( 0 7) ] ( } : 5) : 0 75 ( 8) (
Materiaªy do Repetytorium z matematyki 0/0 Dziaªania na liczbach wymiernych i niewymiernych wiczenie Obliczy + 4 + 4 5. ( + ) ( 4 + 4 5). ( : ) ( : 4) 4 5 6. 7. { [ 7 4 ( 0 7) ] ( } : 5) : 0 75 ( 8) (
Równania ró»niczkowe I rz du (RRIR) Twierdzenie Picarda. Anna D browska. WFTiMS. 23 marca 2010
 Twierdzenie Picarda. Anna D browska. WFTiMS. 23 marca 2010") WFTiMS 23 marca 2010 Spis tre±ci 1 Denicja 1 (równanie ró»niczkowe pierwszego rz du) Równanie y = f (t, y) (1) nazywamy równaniem ró»niczkowym zwyczajnym pierwszego rz du w postaci normalnej. Uwaga 1 Ogólna
WFTiMS 23 marca 2010 Spis tre±ci 1 Denicja 1 (równanie ró»niczkowe pierwszego rz du) Równanie y = f (t, y) (1) nazywamy równaniem ró»niczkowym zwyczajnym pierwszego rz du w postaci normalnej. Uwaga 1 Ogólna
Algorytmy zwiazane z gramatykami bezkontekstowymi
 Algorytmy zwiazane z gramatykami bezkontekstowymi Rozpoznawanie j zyków bezkontekstowych Problem rozpoznawania j zyka L polega na sprawdzaniu przynale»no±ci sªowa wej±ciowego x do L. Zakªadamy,»e j zyk
Algorytmy zwiazane z gramatykami bezkontekstowymi Rozpoznawanie j zyków bezkontekstowych Problem rozpoznawania j zyka L polega na sprawdzaniu przynale»no±ci sªowa wej±ciowego x do L. Zakªadamy,»e j zyk
Ksztaªt orbity planety: I prawo Keplera
 V 0 V 0 Ksztaªt orbity planety: I prawo Keplera oka»emy,»e orbit planety poruszaj cej si pod dziaªaniem siªy ci»ko±ci ze strony Sªo«ca jest krzywa sto»kowa, w szczególno±ci elipsa. Wektor pr dko±ci planety
V 0 V 0 Ksztaªt orbity planety: I prawo Keplera oka»emy,»e orbit planety poruszaj cej si pod dziaªaniem siªy ci»ko±ci ze strony Sªo«ca jest krzywa sto»kowa, w szczególno±ci elipsa. Wektor pr dko±ci planety
Wektory w przestrzeni
 Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
Wektory w przestrzeni Informacje pomocnicze Denicja 1. Wektorem nazywamy uporz dkowan par punktów. Pierwszy z tych punktów nazywamy pocz tkiem wektora albo punktem zaczepienia wektora, a drugi - ko«cem
WST P DO TEORII INFORMACJI I KODOWANIA. Grzegorz Szkibiel. Wiosna 2013/14
 WST P DO TEORII INFORMACJI I KODOWANIA Grzegorz Szkibiel Wiosna 203/4 Spis tre±ci Kodowanie i dekodowanie 4. Kodowanie a szyfrowanie..................... 4.2 Podstawowe poj cia........................
WST P DO TEORII INFORMACJI I KODOWANIA Grzegorz Szkibiel Wiosna 203/4 Spis tre±ci Kodowanie i dekodowanie 4. Kodowanie a szyfrowanie..................... 4.2 Podstawowe poj cia........................
Rachunek ró»niczkowy funkcji jednej zmiennej
 Lista Nr 5 Rachunek ró»niczkowy funkcji jednej zmiennej 5.0. Obliczanie pochodnej funkcji Pochodne funkcji podstawowych. f() = α f () = α α. f() = log a f () = ln a '. f() = ln f () = 3. f() = a f () =
Lista Nr 5 Rachunek ró»niczkowy funkcji jednej zmiennej 5.0. Obliczanie pochodnej funkcji Pochodne funkcji podstawowych. f() = α f () = α α. f() = log a f () = ln a '. f() = ln f () = 3. f() = a f () =
Zastosowania matematyki
 Zastosowania matematyki Monika Bartkiewicz 1 / 126 ...czy«cie dobrze i po»yczajcie niczego si nie spodziewaj c(šk. 6,34-35) Zagadnienie pobierania procentu jest tak stare jak gospodarka pieni»na. Procent
Zastosowania matematyki Monika Bartkiewicz 1 / 126 ...czy«cie dobrze i po»yczajcie niczego si nie spodziewaj c(šk. 6,34-35) Zagadnienie pobierania procentu jest tak stare jak gospodarka pieni»na. Procent
1 Ró»niczka drugiego rz du i ekstrema
 Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 1 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 1 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
WYKŠAD 3. di dt. Ġ = d (r v) = r P. (1.53) dt. (1.55) Przyrównuj c stronami (1.54) i (1.55) otrzymujemy wektorowe równanie
 = r P. (1.53) dt. (1.55) Przyrównuj c stronami (1.54) i (1.55) otrzymujemy wektorowe równanie") WYKŠAD 3 Równania Gaussa dla e, I, Ω, ω, M. Ω, di 1.3.3 Od caªki ól do ė, W odró»nieniu od skalarnej caªki siª»ywych, wektorowa caªka ól mo»e nam osªu»y do otrzymania a» trzech kolejnych równa«gaussa.
WYKŠAD 3 Równania Gaussa dla e, I, Ω, ω, M. Ω, di 1.3.3 Od caªki ól do ė, W odró»nieniu od skalarnej caªki siª»ywych, wektorowa caªka ól mo»e nam osªu»y do otrzymania a» trzech kolejnych równa«gaussa.
Elementy geometrii analitycznej w przestrzeni
 Wykªad 3 Elementy geometrii analitycznej w przestrzeni W wykªadzie tym wi kszy nacisk zostaª poªo»ony raczej na intuicyjne rozumienie deniowanych poj, ni» ±cisªe ich zdeniowanie. Dlatego niniejszy wykªad
Wykªad 3 Elementy geometrii analitycznej w przestrzeni W wykªadzie tym wi kszy nacisk zostaª poªo»ony raczej na intuicyjne rozumienie deniowanych poj, ni» ±cisªe ich zdeniowanie. Dlatego niniejszy wykªad
1 Metody iteracyjne rozwi zywania równania f(x)=0
=0") 1 Metody iteracyjne rozwi zywania równania f()=0 1.1 Metoda bisekcji Zaªó»my,»e funkcja f jest ci gªa w [a 0, b 0 ]. Pierwiastek jest w przedziale [a 0, b 0 ] gdy f(a 0 )f(b 0 ) < 0. (1) Ustalmy f(a 0
1 Metody iteracyjne rozwi zywania równania f()=0 1.1 Metoda bisekcji Zaªó»my,»e funkcja f jest ci gªa w [a 0, b 0 ]. Pierwiastek jest w przedziale [a 0, b 0 ] gdy f(a 0 )f(b 0 ) < 0. (1) Ustalmy f(a 0
Janusz Adamowski METODY OBLICZENIOWE FIZYKI Zastosowanie eliptycznych równa«ró»niczkowych
 Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdziaª 9 RÓWNANIA ELIPTYCZNE 9.1 Zastosowanie eliptycznych równa«ró»niczkowych cz stkowych 9.1.1 Problemy z warunkami brzegowymi W przestrzeni dwuwymiarowej
Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdziaª 9 RÓWNANIA ELIPTYCZNE 9.1 Zastosowanie eliptycznych równa«ró»niczkowych cz stkowych 9.1.1 Problemy z warunkami brzegowymi W przestrzeni dwuwymiarowej
Ekonometria - wykªad 1
 Ekonometria - wykªad 1 0. Wprowadzenie Barbara Jasiulis-Goªdyn 28.02.2014 2013/2014 Ekonometria Literatura [1] B. Borkowski, H. Dudek, W. Szczesny, Ekonometria. Wybrane Zaganienia, PWN, Warszawa 2003.
Ekonometria - wykªad 1 0. Wprowadzenie Barbara Jasiulis-Goªdyn 28.02.2014 2013/2014 Ekonometria Literatura [1] B. Borkowski, H. Dudek, W. Szczesny, Ekonometria. Wybrane Zaganienia, PWN, Warszawa 2003.
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Fundamentals of Autonomous Systems Lecture 1 Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 7th March 2017 Rules and regulations Lecturer: Dariusz Pazderski room
Fundamentals of Autonomous Systems Lecture 1 Dariusz Pazderski 1 1 Katedra Sterowania i In»ynierii Systemów, Politechnika Pozna«ska 7th March 2017 Rules and regulations Lecturer: Dariusz Pazderski room
Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ. Marek Majewski Aktualizacja: 31 pa¹dziernika 2006
 Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ Marek Majewski Aktualizacja: 1 pa¹dziernika 006 Spis tre±ci 1 Macierze dziaªania na macierzach. Wyznaczniki 1 Macierz odwrotna. Rz d macierzy
Zadania z z matematyki dla studentów gospodarki przestrzennej UŠ Marek Majewski Aktualizacja: 1 pa¹dziernika 006 Spis tre±ci 1 Macierze dziaªania na macierzach. Wyznaczniki 1 Macierz odwrotna. Rz d macierzy
MECHANIK NR 3/2015 203
 MECHANIK NR 3/2015 203 Piotr GRUSZKA 1 przekładnie śrubowe toczne, manipulator, planowanie trajektorii ball screw, manipulator, modeling robots trajector. ANALIZA DYNAMIKI UKŁADU KINEMATYCZNEGO DŹWIGNIOWEGO
MECHANIK NR 3/2015 203 Piotr GRUSZKA 1 przekładnie śrubowe toczne, manipulator, planowanie trajektorii ball screw, manipulator, modeling robots trajector. ANALIZA DYNAMIKI UKŁADU KINEMATYCZNEGO DŹWIGNIOWEGO
Ekonometria. wiczenia 1 Regresja liniowa i MNK. Andrzej Torój. Instytut Ekonometrii Zakªad Ekonometrii Stosowanej
 Ekonometria wiczenia 1 Regresja liniowa i MNK (1) Ekonometria 1 / 25 Plan wicze«1 Ekonometria czyli...? 2 Obja±niamy ceny wina 3 Zadania z podr cznika (1) Ekonometria 2 / 25 Plan prezentacji 1 Ekonometria
Ekonometria wiczenia 1 Regresja liniowa i MNK (1) Ekonometria 1 / 25 Plan wicze«1 Ekonometria czyli...? 2 Obja±niamy ceny wina 3 Zadania z podr cznika (1) Ekonometria 2 / 25 Plan prezentacji 1 Ekonometria
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
Kinematyka 2/15. Andrzej Kapanowski ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków. A. Kapanowski Kinematyka
 Kinematyka 2/15 Andrzej Kapanowski http://users.uj.edu.pl/ ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków 2018 Podstawowe poj cia Kinematyka jest cz ±ci mechaniki, która zajmuje si opisem
Kinematyka 2/15 Andrzej Kapanowski http://users.uj.edu.pl/ ufkapano/ Instytut Fizyki, Uniwersytet Jagiello«ski, Kraków 2018 Podstawowe poj cia Kinematyka jest cz ±ci mechaniki, która zajmuje si opisem
Teoria Sterowania. Warunki zaliczenia
 Teoria Sterowania Warunki zaliczenia. Pytania. Tematy µ-projektów. 3.5 poprawne zaliczenie testu; Warunki zaliczenia 4 poprawne zaliczenie testu + poprawne rozwi zanie kilku zada«(pliki Alin, TS-skrypt1,
Teoria Sterowania Warunki zaliczenia. Pytania. Tematy µ-projektów. 3.5 poprawne zaliczenie testu; Warunki zaliczenia 4 poprawne zaliczenie testu + poprawne rozwi zanie kilku zada«(pliki Alin, TS-skrypt1,
PRAWA ZACHOWANIA. Podstawowe terminy. Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc
 PRAWA ZACHOWANIA Podstawowe terminy Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc a) si wewn trznych - si dzia aj cych na dane cia o ze strony innych
PRAWA ZACHOWANIA Podstawowe terminy Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc a) si wewn trznych - si dzia aj cych na dane cia o ze strony innych
Spis tre±ci. Plan. 1 Pochodna cz stkowa. 1.1 Denicja Przykªady Wªasno±ci Pochodne wy»szych rz dów... 3
 Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 2 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
Plan Spis tre±ci 1 Pochodna cz stkowa 1 1.1 Denicja................................ 2 1.2 Przykªady............................... 2 1.3 Wªasno±ci............................... 2 1.4 Pochodne wy»szych
Wykªad 12. Transformata Laplace'a i metoda operatorowa
 Wykªad 2. Tranformata Laplace'a i metoda operatorowa Tranformata Laplace'a Dla odpowiednio okre±lonej klay funkcji zdeniujemy operator L, nazywany tranformat Laplace'a, okre±lony wzorem L[ f ]() = f(t)e
Wykªad 2. Tranformata Laplace'a i metoda operatorowa Tranformata Laplace'a Dla odpowiednio okre±lonej klay funkcji zdeniujemy operator L, nazywany tranformat Laplace'a, okre±lony wzorem L[ f ]() = f(t)e
Matematyka dyskretna dla informatyków
 Matematyka dyskretna dla informatyków Cz ± I: Elementy kombinatoryki Jerzy Jaworski Zbigniew Palka Jerzy Szyma«ski Uniwersytet im. Adama Mickiewicza Pozna«2007 4 Zależności rekurencyjne Wiele zale»no±ci
Matematyka dyskretna dla informatyków Cz ± I: Elementy kombinatoryki Jerzy Jaworski Zbigniew Palka Jerzy Szyma«ski Uniwersytet im. Adama Mickiewicza Pozna«2007 4 Zależności rekurencyjne Wiele zale»no±ci
X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne)
") X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne) Zadanie 1 Obecnie u»ywane tablice rejestracyjne wydawane s od 1 maja 2000r. Numery rejestracyjne aut s tworzone ze zbioru
X WARMI SKO-MAZURSKIE ZAWODY MATEMATYCZNE 18 maja 2012 (szkoªy ponadgimnazjalne) Zadanie 1 Obecnie u»ywane tablice rejestracyjne wydawane s od 1 maja 2000r. Numery rejestracyjne aut s tworzone ze zbioru
Statystyka matematyczna
 Statystyka matematyczna Aleksandra Ki±lak-Malinowska akis@uwm.edu.pl http://wmii.uwm.edu.pl/ akis/ Czym zajmuje si statystyka? Statystyka zajmuje si opisywaniem i analiz zjawisk masowych otaczaj cej czªowieka
Statystyka matematyczna Aleksandra Ki±lak-Malinowska akis@uwm.edu.pl http://wmii.uwm.edu.pl/ akis/ Czym zajmuje si statystyka? Statystyka zajmuje si opisywaniem i analiz zjawisk masowych otaczaj cej czªowieka
Android. Podstawy tworzenia aplikacji. Piotr Fulma«ski. March 4, 2015
 Android Podstawy tworzenia aplikacji Piotr Fulma«ski Instytut Nauk Ekonomicznych i Informatyki, Pa«stwowa Wy»sza Szkoªa Zawodowa w Pªocku, Polska March 4, 2015 Table of contents Framework Jednym z najwarto±ciowszych
Android Podstawy tworzenia aplikacji Piotr Fulma«ski Instytut Nauk Ekonomicznych i Informatyki, Pa«stwowa Wy»sza Szkoªa Zawodowa w Pªocku, Polska March 4, 2015 Table of contents Framework Jednym z najwarto±ciowszych
Fizyka dla Informatyków Wykªad 10 Elektrodynamika
 Fizyka dla Informatyków Wykªad 10 Elektrodynamika Katedra Informatyki Stosowanej PJWSTK 2009 Dzisiaj b dziemy opowiada o elektryczno±ci. I o tym, i co z tego wynika! Rys. 1: Model atomu wodoru Spis tre±ci
Fizyka dla Informatyków Wykªad 10 Elektrodynamika Katedra Informatyki Stosowanej PJWSTK 2009 Dzisiaj b dziemy opowiada o elektryczno±ci. I o tym, i co z tego wynika! Rys. 1: Model atomu wodoru Spis tre±ci
Graka komputerowa Wykªad 3 Geometria pªaszczyzny
 Graka komputerowa Wykªad 3 Geometria pªaszczyzny Instytut Informatyki i Automatyki Pa«stwowa Wy»sza Szkoªa Informatyki i Przedsi biorczo±ci w Šom»y 2 0 0 9 Spis tre±ci Spis tre±ci 1 Przeksztaªcenia pªaszczyzny
Graka komputerowa Wykªad 3 Geometria pªaszczyzny Instytut Informatyki i Automatyki Pa«stwowa Wy»sza Szkoªa Informatyki i Przedsi biorczo±ci w Šom»y 2 0 0 9 Spis tre±ci Spis tre±ci 1 Przeksztaªcenia pªaszczyzny
Tadeusz SZKODNY. POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH
 POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 Tadeusz SZKODNY SUB Gottingen 217 780 474 2005 A 3014 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH GLIWICE 2004 SPIS TREŚCI WAŻNIEJSZE OZNACZENIA
POLITECHNIKA ŚLĄSKA ZESZYTY NAUKOWE Nr 1647 Tadeusz SZKODNY SUB Gottingen 217 780 474 2005 A 3014 MODELOWANIE I SYMULACJA RUCHU MANIPULATORÓW ROBOTÓW PRZEMYSŁOWYCH GLIWICE 2004 SPIS TREŚCI WAŻNIEJSZE OZNACZENIA
Przeksztaªcenia liniowe
 Przeksztaªcenia liniowe Przykªady Pokaza,»e przeksztaªcenie T : R 2 R 2, postaci T (x, y) = (x + y, x 6y) jest przeksztaªceniem liniowym Sprawdzimy najpierw addytywno± przeksztaªcenia T Niech v = (x, y
Przeksztaªcenia liniowe Przykªady Pokaza,»e przeksztaªcenie T : R 2 R 2, postaci T (x, y) = (x + y, x 6y) jest przeksztaªceniem liniowym Sprawdzimy najpierw addytywno± przeksztaªcenia T Niech v = (x, y
Ekstremalnie fajne równania
 Ekstremalnie fajne równania ELEMENTY RACHUNKU WARIACYJNEGO Zaczniemy od ogólnych uwag nt. rachunku wariacyjnego, który jest bardzo przydatnym narz dziem mog cym posªu»y do rozwi zywania wielu problemów
Ekstremalnie fajne równania ELEMENTY RACHUNKU WARIACYJNEGO Zaczniemy od ogólnych uwag nt. rachunku wariacyjnego, który jest bardzo przydatnym narz dziem mog cym posªu»y do rozwi zywania wielu problemów
Bifurkacje. Ewa Gudowska-Nowak Nowak. Plus ratio quam vis
 Bifurkacje Nowak Plus ratio quam vis M. Kac Complex Systems Research Center, M. Smoluchowski Institute of Physics, Jagellonian University, Kraków, Poland 2008 Gªówna idea.. Pozornie "dynamika" ukªadów
Bifurkacje Nowak Plus ratio quam vis M. Kac Complex Systems Research Center, M. Smoluchowski Institute of Physics, Jagellonian University, Kraków, Poland 2008 Gªówna idea.. Pozornie "dynamika" ukªadów
PRZYPOMNIENIE Ka»d przestrze«wektorow V, o wymiarze dim V = n < nad ciaªem F mo»na jednoznacznie odwzorowa na przestrze«f n n-ek uporz dkowanych:
 Plan Spis tre±ci 1 Homomorzm 1 1.1 Macierz homomorzmu....................... 2 1.2 Dziaªania............................... 3 2 Ukªady równa«6 3 Zadania 8 1 Homomorzm PRZYPOMNIENIE Ka»d przestrze«wektorow
Plan Spis tre±ci 1 Homomorzm 1 1.1 Macierz homomorzmu....................... 2 1.2 Dziaªania............................... 3 2 Ukªady równa«6 3 Zadania 8 1 Homomorzm PRZYPOMNIENIE Ka»d przestrze«wektorow
Wstęp do robotyki. Plan wykładów. Wojciech Szynkiewicz. Plan wykładu... Plan wykładu... Instytut Automatyki i Informatyki Stosowanej PW
 Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Plan wykładów Wstęp do robotyki Wojciech Szynkiewicz pok.554 e-mail: W.Szynkiewicz@ia.pw.edu.pl Instytut Automatyki i Informatyki Stosowanej PW Podstawowe pojęcia z dziedziny robotyki: krótka historia
Pewne algorytmy algebry liniowej Andrzej Strojnowski
 Pewne algorytmy algebry liniowej ndrzej Strojnowski 6 stycznia 2011 Przedstawimy tu kilka algorytmów rozwi zuj ce typowe zadania algebry liniowej Wszystkie zaprezentowane tu algorytmy polegaj na zbudowaniu
Pewne algorytmy algebry liniowej ndrzej Strojnowski 6 stycznia 2011 Przedstawimy tu kilka algorytmów rozwi zuj ce typowe zadania algebry liniowej Wszystkie zaprezentowane tu algorytmy polegaj na zbudowaniu
Mikro II: Krzywe kosztów, Poda» rmy i Poda» gaª zi.
 Mikro II: Krzywe kosztów, Poda» rmy i Poda» gaª zi. Krzysztof Makarski 22 Krzywe kosztów Wst p Celem jest wyprowadzenie funkcji poda»y i jej wªasno±ci. Funkcj poda»y wyprowadzamy z decyzji maksymalizuj
Mikro II: Krzywe kosztów, Poda» rmy i Poda» gaª zi. Krzysztof Makarski 22 Krzywe kosztów Wst p Celem jest wyprowadzenie funkcji poda»y i jej wªasno±ci. Funkcj poda»y wyprowadzamy z decyzji maksymalizuj
Macierz A: macierz problemów liniowych (IIII); Macierz rozszerzona problemów liniowych (IIII): a 11 a 1m b 1 B = a n1 a nm b n
; Macierz rozszerzona problemów liniowych (IIII): a 11 a 1m b 1 B = a n1 a nm b n") Plan Spis tre±ci 1 Problemy liniowe 1 2 Zadania I 3 3 Formy biliniowe 3 3.1 Odwzorowania wieloliniowe..................... 3 3.2 Formy biliniowe............................ 4 4 Formy kwadratowe 4 1 Problemy
Plan Spis tre±ci 1 Problemy liniowe 1 2 Zadania I 3 3 Formy biliniowe 3 3.1 Odwzorowania wieloliniowe..................... 3 3.2 Formy biliniowe............................ 4 4 Formy kwadratowe 4 1 Problemy
r = x x2 2 + x2 3.
 Przestrze«aniczna Def. 1. Przestrzeni aniczn zwi zan z przestrzeni liniow V nazywamy dowolny niepusty zbiór P z dziaªaniem ω : P P V (które dowolnej parze elementów zbioru P przyporz dkowuje wektor z przestrzeni
Przestrze«aniczna Def. 1. Przestrzeni aniczn zwi zan z przestrzeni liniow V nazywamy dowolny niepusty zbiór P z dziaªaniem ω : P P V (które dowolnej parze elementów zbioru P przyporz dkowuje wektor z przestrzeni
Rzut oka na zagadnienia zwi zane z projektowaniem list rozkazów
 Rzut oka na zagadnienia zwi zane z projektowaniem list rozkazów 1 Wst p Przypomnijmy,»e komputer skªada si z procesora, pami ci, systemu wej±cia-wyj±cia oraz po- ª cze«mi dzy nimi. W procesorze mo»emy
Rzut oka na zagadnienia zwi zane z projektowaniem list rozkazów 1 Wst p Przypomnijmy,»e komputer skªada si z procesora, pami ci, systemu wej±cia-wyj±cia oraz po- ª cze«mi dzy nimi. W procesorze mo»emy
Macierze i Wyznaczniki
 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja 1. Tablic nast puj cej postaci a 11 a 12... a 1n a 21 a 22... a 2n A =... a m1 a m2... a mn nazywamy macierz o m wierszach i n kolumnach,
Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja 1. Tablic nast puj cej postaci a 11 a 12... a 1n a 21 a 22... a 2n A =... a m1 a m2... a mn nazywamy macierz o m wierszach i n kolumnach,
Modele wielorównaniowe. Estymacja parametrów
 Modele wielorównaniowe. Estymacja parametrów Ekonometria Szeregów Czasowych SGH Estymacja 1 / 47 Plan wykªadu 1 Po±rednia MNK 2 Metoda zmiennych instrumentalnych 3 Podwójna MNK 4 Estymatory klasy k 5 MNW
Modele wielorównaniowe. Estymacja parametrów Ekonometria Szeregów Czasowych SGH Estymacja 1 / 47 Plan wykªadu 1 Po±rednia MNK 2 Metoda zmiennych instrumentalnych 3 Podwójna MNK 4 Estymatory klasy k 5 MNW
XVII Warmi«sko-Mazurskie Zawody Matematyczne
 1 XVII Warmi«sko-Mazurskie Zawody Matematyczne Kategoria: klasa VIII szkoªy podstawowej i III gimnazjum Olsztyn, 16 maja 2019r. Zad. 1. Udowodnij,»e dla dowolnych liczb rzeczywistych x, y, z speªniaj cych
1 XVII Warmi«sko-Mazurskie Zawody Matematyczne Kategoria: klasa VIII szkoªy podstawowej i III gimnazjum Olsztyn, 16 maja 2019r. Zad. 1. Udowodnij,»e dla dowolnych liczb rzeczywistych x, y, z speªniaj cych
ZADANIA. Maciej Zakarczemny
 ZADANIA Maciej Zakarczemny 2 Spis tre±ci 1 Algebra 5 2 Analiza 7 2.1 Granice iterowane, granica podwójna funkcji dwóch zmiennych....... 7 2.2 Caªki powierzchniowe zorientowane...................... 8 2.2.1
ZADANIA Maciej Zakarczemny 2 Spis tre±ci 1 Algebra 5 2 Analiza 7 2.1 Granice iterowane, granica podwójna funkcji dwóch zmiennych....... 7 2.2 Caªki powierzchniowe zorientowane...................... 8 2.2.1
Instytut Politechniczny Zakład Elektrotechniki i Elektroniki
 Kod przedmiotu: PLPILA02-IPELE-I-VIIsD4-2013SAiE-S Pozycja planu: D4 1. INFORMACJE O PRZEDMIOCIE A. Podstawowe dane 1 Nazwa przedmiotu Podstawy robotyki 2 Kierunek studiów Elektrotechnika 3 Poziom studiów
Kod przedmiotu: PLPILA02-IPELE-I-VIIsD4-2013SAiE-S Pozycja planu: D4 1. INFORMACJE O PRZEDMIOCIE A. Podstawowe dane 1 Nazwa przedmiotu Podstawy robotyki 2 Kierunek studiów Elektrotechnika 3 Poziom studiów
1 0 Je»eli wybierzemy baz A = ((1, 1), (2, 1)) to M(f) A A =. 0 2 Daje to znacznie lepszy opis endomorzmu f.
, (2, 1)) to M(f) A A =. 0 2 Daje to znacznie lepszy opis endomorzmu f.") GAL II 2012-2013 A Strojnowski str1 Wykªad 1 Ten semestr rozpoczniemy badaniem endomorzmów sko«czenie wymiarowych przestrzeni liniowych Denicja 11 Niech V b dzie przestrzeni liniow nad ciaªem K 1) Przeksztaªceniem
GAL II 2012-2013 A Strojnowski str1 Wykªad 1 Ten semestr rozpoczniemy badaniem endomorzmów sko«czenie wymiarowych przestrzeni liniowych Denicja 11 Niech V b dzie przestrzeni liniow nad ciaªem K 1) Przeksztaªceniem
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Nazwa przedmiotu: KINEMATYKA I DYNAMIKA MANIPULATORÓW I ROBOTÓW Kierunek: Mechatronika Rodzaj przedmiotu: obowiązkowy na specjalności: Systemy sterowania Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU
Koncepcje lokomocji w przyrodzie
 Wstęp do Robotyki c W. Szynkiewicz, 29 1 Koncepcje lokomocji w przyrodzie Typ ruchu Opory ruchu Podstawowa kinematyka ruchu Przep³yw w rurze Si³y hydrodynamiczne Wiry Pe³zanie Œlizganie Bieg Skoki Si³y
Wstęp do Robotyki c W. Szynkiewicz, 29 1 Koncepcje lokomocji w przyrodzie Typ ruchu Opory ruchu Podstawowa kinematyka ruchu Przep³yw w rurze Si³y hydrodynamiczne Wiry Pe³zanie Œlizganie Bieg Skoki Si³y
Stacjonarne szeregi czasowe
 e-mail:e.kozlovski@pollub.pl Spis tre±ci 1 Denicja 1 Szereg {x t } 1 t N nazywamy ±ci±le stacjonarnym (stacjonarnym w w»szym sensie), je»eli dla dowolnych m, t 1, t 2,..., t m, τ ª czny rozkªad prawdopodobie«stwa
e-mail:e.kozlovski@pollub.pl Spis tre±ci 1 Denicja 1 Szereg {x t } 1 t N nazywamy ±ci±le stacjonarnym (stacjonarnym w w»szym sensie), je»eli dla dowolnych m, t 1, t 2,..., t m, τ ª czny rozkªad prawdopodobie«stwa
ELEMENTARNA TEORIA LICZB. 1. Podzielno±
 ELEMENTARNA TEORIA LICZB IZABELA AGATA MALINOWSKA N = {1, 2,...} 1. Podzielno± Denicja 1.1. Niepusty podzbiór A zbioru liczb naturalnych jest ograniczony, je»eli istnieje taka liczba naturalna n 0,»e m
ELEMENTARNA TEORIA LICZB IZABELA AGATA MALINOWSKA N = {1, 2,...} 1. Podzielno± Denicja 1.1. Niepusty podzbiór A zbioru liczb naturalnych jest ograniczony, je»eli istnieje taka liczba naturalna n 0,»e m
Analiza obserwowalno±ci
 Analiza obserwowalno±ci Niech ẋ(t) = Ax(t), y(t) = Cx(t), x(0) R n gdzie A R n n oraz C R q n. Para (A, C) jest caªkowicie obserwowalna je»eli x(0) znajomo± funkcji y : [0, t f ] R q (wyj±cia obiektu)
Analiza obserwowalno±ci Niech ẋ(t) = Ax(t), y(t) = Cx(t), x(0) R n gdzie A R n n oraz C R q n. Para (A, C) jest caªkowicie obserwowalna je»eli x(0) znajomo± funkcji y : [0, t f ] R q (wyj±cia obiektu)
1 Bª dy i arytmetyka zmiennopozycyjna
 1 Bª dy i arytmetyka zmiennopozycyjna Liczby w pami ci komputera przedstawiamy w ukªadzie dwójkowym w postaci zmiennopozycyjnej Oznacza to,»e s one postaci ±m c, 01 m < 1, c min c c max, (1) gdzie m nazywamy
1 Bª dy i arytmetyka zmiennopozycyjna Liczby w pami ci komputera przedstawiamy w ukªadzie dwójkowym w postaci zmiennopozycyjnej Oznacza to,»e s one postaci ±m c, 01 m < 1, c min c c max, (1) gdzie m nazywamy
Legalna ±ci ga z RRI 2015/2016
 Legalna ±ci ga z RRI 205/206 Równania ró»niczkowe pierwszego rz du sprowadzalne do równa«o zmiennych rozdzielonych a) Równanie postaci: = f(ax + by + c), Równanie postaci: = f(ax + by + c), () wprowadzamy
Legalna ±ci ga z RRI 205/206 Równania ró»niczkowe pierwszego rz du sprowadzalne do równa«o zmiennych rozdzielonych a) Równanie postaci: = f(ax + by + c), Równanie postaci: = f(ax + by + c), () wprowadzamy
Kinematyka robotów mobilnych
 Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
Kinematyka robotów mobilnych Maciej Patan Uniwersytet Zielonogórski Instytut Sterowania i Systemów Informatycznych Adaptacja slajdów do wykładu Autonomous mobile robots R. Siegwart (ETH Zurich Master Course:
Rachunek caªkowy funkcji wielu zmiennych
 Rachunek caªkowy funkcji wielu zmiennych I. Malinowska, Z. Šagodowski Politechnika Lubelska 8 czerwca 2015 Caªka iterowana podwójna Denicja Je»eli funkcja f jest ci gªa na prostok cie P = {(x, y) : a x
Rachunek caªkowy funkcji wielu zmiennych I. Malinowska, Z. Šagodowski Politechnika Lubelska 8 czerwca 2015 Caªka iterowana podwójna Denicja Je»eli funkcja f jest ci gªa na prostok cie P = {(x, y) : a x
Szkice rozwi za«zada«z egzaminu 1
 Egzamin - szkic rozwi za«sem. zimowy 06/07 AM, Budownictwo, IL PW Szkice rozwi za«zada«z egzaminu. Poda denicj granicy oraz ci gªo±ci funkcji. Def. (Heinego) Liczb g nazywamy granic funkcji f : D R w unkcie
Egzamin - szkic rozwi za«sem. zimowy 06/07 AM, Budownictwo, IL PW Szkice rozwi za«zada«z egzaminu. Poda denicj granicy oraz ci gªo±ci funkcji. Def. (Heinego) Liczb g nazywamy granic funkcji f : D R w unkcie
Statystyka matematyczna - ZSTA LMO
 Statystyka matematyczna - ZSTA LMO Šukasz Smaga Wydziaª Matematyki i Informatyki Uniwersytet im. Adama Mickiewicza w Poznaniu Wykªad 4 Šukasz Smaga (WMI UAM) ZSTA LMO Wykªad 4 1 / 18 Wykªad 4 - zagadnienia
Statystyka matematyczna - ZSTA LMO Šukasz Smaga Wydziaª Matematyki i Informatyki Uniwersytet im. Adama Mickiewicza w Poznaniu Wykªad 4 Šukasz Smaga (WMI UAM) ZSTA LMO Wykªad 4 1 / 18 Wykªad 4 - zagadnienia
1 Przypomnienie wiadomo±ci ze szkoªy ±redniej. Rozwi zywanie prostych równa«i nierówno±ci
 Zebraª do celów edukacyjnych od wykªadowców PK, z ró»nych podr czników Maciej Zakarczemny 1 Przypomnienie wiadomo±ci ze szkoªy ±redniej Rozwi zywanie prostych równa«i nierówno±ci dotycz cych funkcji elementarnych,
Zebraª do celów edukacyjnych od wykªadowców PK, z ró»nych podr czników Maciej Zakarczemny 1 Przypomnienie wiadomo±ci ze szkoªy ±redniej Rozwi zywanie prostych równa«i nierówno±ci dotycz cych funkcji elementarnych,
Programowanie obrabiarek CNC. Nr H8
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Programowanie obrabiarek CNC Nr H8 Programowanie obróbki 5-osiowej (3+2) w układzie sterowania itnc530 Opracował: Dr inż. Wojciech
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Programowanie obrabiarek CNC Nr H8 Programowanie obróbki 5-osiowej (3+2) w układzie sterowania itnc530 Opracował: Dr inż. Wojciech
ARYTMETYKA MODULARNA. Grzegorz Szkibiel. Wiosna 2014/15
 ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
ARYTMETYKA MODULARNA Grzegorz Szkibiel Wiosna 2014/15 Spis tre±ci 1 Denicja kongruencji i jej podstawowe wªasno±ci 3 2 Systemy pozycyjne 8 3 Elementy odwrotne 12 4 Pewne zastosowania elementów odwrotnych
POLITECHNIKA WROCŠAWSKA WYDZIAŠ ELEKTRONIKI PRACA DYPLOMOWA MAGISTERSKA
 POLITECHNIKA WROCŠAWSKA WYDZIAŠ ELEKTRONIKI Kierunek: Specjalno± : Automatyka i Robotyka (AIR) Robotyka (ARR) PRACA DYPLOMOWA MAGISTERSKA Podatny manipulator planarny - budowa i sterowanie Vulnerable planar
POLITECHNIKA WROCŠAWSKA WYDZIAŠ ELEKTRONIKI Kierunek: Specjalno± : Automatyka i Robotyka (AIR) Robotyka (ARR) PRACA DYPLOMOWA MAGISTERSKA Podatny manipulator planarny - budowa i sterowanie Vulnerable planar
KARTA OPISU MODUŁU KSZTAŁCENIA
 Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Sterowanie robotów mobilnych Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki 1 /
Nazwa modułu: Kierunek studiów KARTA OPISU MODUŁU KSZTAŁCENIA Sterowanie robotów mobilnych Profil kształcenia (ogólnoakademicki, praktyczny) Kod Rok / Semestr Automatyka i Robotyka ogólnoakademicki 1 /
Krzywe i powierzchnie stopnia drugiego
 Krzywe i powierzchnie stopnia drugiego Iwona Malinowska, Zbigniew Šagodowski 25 maja 2015 I. Malinowska, Z. Lagodowski Geometria 25 maja 2015 1 / 30 Rozwa»my dwie proste przecinaj ce si pod k tem α, 0
Krzywe i powierzchnie stopnia drugiego Iwona Malinowska, Zbigniew Šagodowski 25 maja 2015 I. Malinowska, Z. Lagodowski Geometria 25 maja 2015 1 / 30 Rozwa»my dwie proste przecinaj ce si pod k tem α, 0
D l. D p. Rodzaje baz jezdnych robotów mobilnych
 ERO Elementy robotyki 1 Rodzaje baz jezdnych robotów mobilnych Napęd różnicowy dwa niezależnie napędzane koła jednej osi, dla zachowania równowagi dodane jest trzecie koło bierne (lub dwa bierne koła)
ERO Elementy robotyki 1 Rodzaje baz jezdnych robotów mobilnych Napęd różnicowy dwa niezależnie napędzane koła jednej osi, dla zachowania równowagi dodane jest trzecie koło bierne (lub dwa bierne koła)
dynamiki mobilnego robota transportowego.
 390 MECHANIK NR 5 6/2018 Dynamika mobilnego robota transportowego The dynamics of a mobile transport robot MARCIN SZUSTER PAWEŁ OBAL * DOI: https://doi.org/10.17814/mechanik.2018.5-6.51 W artykule omówiono
390 MECHANIK NR 5 6/2018 Dynamika mobilnego robota transportowego The dynamics of a mobile transport robot MARCIN SZUSTER PAWEŁ OBAL * DOI: https://doi.org/10.17814/mechanik.2018.5-6.51 W artykule omówiono
Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna
 Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna 1. Podaj denicj liczby zespolonej. 2. Jak obliczy sum /iloczyn dwóch liczb zespolonych w postaci algebraicznej? 3. Co to jest liczba urojona?
Zagadnienia na wej±ciówki z matematyki Technologia Chemiczna 1. Podaj denicj liczby zespolonej. 2. Jak obliczy sum /iloczyn dwóch liczb zespolonych w postaci algebraicznej? 3. Co to jest liczba urojona?
Macierze i Wyznaczniki
 dr Krzysztof yjewski Mechatronika; S-I.in». 5 pa¹dziernika 6 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja. Tablic nast puj cej postaci a a... a n a a... a n A =... a m a m...
dr Krzysztof yjewski Mechatronika; S-I.in». 5 pa¹dziernika 6 Macierze i Wyznaczniki Kilka wzorów i informacji pomocniczych: Denicja. Tablic nast puj cej postaci a a... a n a a... a n A =... a m a m...
Regulator impedancyjny dla elektrycznego zespołu napędowego robota
 Regulator impedancyjny dla elektrycznego zespołu napędowego robota Edward Jezierski 1, Artur Gmerek 2 Streszczenie W artykule została przedstawiona propozycja regulatora impedancji, zdolnego do wpływania
Regulator impedancyjny dla elektrycznego zespołu napędowego robota Edward Jezierski 1, Artur Gmerek 2 Streszczenie W artykule została przedstawiona propozycja regulatora impedancji, zdolnego do wpływania
Elementy animacji sterowanie manipulatorem
 Elementy animacji sterowanie manipulatorem 1 Cel zadania Wykształcenie umiejętności korzystania z zapisu modelu aplikacji w UML oraz definiowania właściwego interfejsu klasy. 2 Opis zadania Należy napisać
Elementy animacji sterowanie manipulatorem 1 Cel zadania Wykształcenie umiejętności korzystania z zapisu modelu aplikacji w UML oraz definiowania właściwego interfejsu klasy. 2 Opis zadania Należy napisać
Interpolacja funkcjami sklejanymi
 Interpolacja funkcjami sklejanymi Funkcje sklejane: Zaªó»my,»e mamy n + 1 w zªów t 0, t 1,, t n takich,»e t 0 < t 1 < < t n Dla danej liczby caªkowitej, nieujemnej k funkcj sklejan stopnia k nazywamy tak
Interpolacja funkcjami sklejanymi Funkcje sklejane: Zaªó»my,»e mamy n + 1 w zªów t 0, t 1,, t n takich,»e t 0 < t 1 < < t n Dla danej liczby caªkowitej, nieujemnej k funkcj sklejan stopnia k nazywamy tak
Rozdziaª 13. Przykªadowe projekty zaliczeniowe
 Rozdziaª 13 Przykªadowe projekty zaliczeniowe W tej cz ±ci skryptu przedstawimy przykªady projektów na zaliczenia zaj z laboratorium komputerowego z matematyki obliczeniowej. Projekty mo»na potraktowa
Rozdziaª 13 Przykªadowe projekty zaliczeniowe W tej cz ±ci skryptu przedstawimy przykªady projektów na zaliczenia zaj z laboratorium komputerowego z matematyki obliczeniowej. Projekty mo»na potraktowa
PL B1. Mechanizm pedipulatora do ustawiania pozycji modułu napędowego, zwłaszcza robota mobilnego
 PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223875 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223875 (13) B1 (21) Numer zgłoszenia: 406656 (51) Int.Cl. F16H 1/36 (2006.01) F16H 3/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,
![1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,](/thumbs/93/111864182.jpg "1 a + b 1 = 1 a + 1 b 1. (a + b 1)(a + b ab) = ab, (a + b)(a + b ab 1) = 0, (a + b)[a(1 b) + (b 1)] = 0,") XIII Warmi«sko-Mazurskie Zawody Matematyczne. Olsztyn 2015 Rozwi zania zada«dla szkóª ponadgimnazjalnych ZADANIE 1 Zakªadamy,»e a, b 0, 1 i a + b 1. Wykaza,»e z równo±ci wynika,»e a = -b 1 a + b 1 = 1
XIII Warmi«sko-Mazurskie Zawody Matematyczne. Olsztyn 2015 Rozwi zania zada«dla szkóª ponadgimnazjalnych ZADANIE 1 Zakªadamy,»e a, b 0, 1 i a + b 1. Wykaza,»e z równo±ci wynika,»e a = -b 1 a + b 1 = 1
WICZENIE 2 Badanie podstawowych elementów pasywnych
 Laboratorium Elektroniki i Elektrotechniki Katedra Sterowania i In»ynierii Systemów www.control.put.poznan.pl 1 Politechnika Pozna«ska WICZENIE 2 Badanie podstawowych elementów pasywnych Celem wiczenia
Laboratorium Elektroniki i Elektrotechniki Katedra Sterowania i In»ynierii Systemów www.control.put.poznan.pl 1 Politechnika Pozna«ska WICZENIE 2 Badanie podstawowych elementów pasywnych Celem wiczenia
Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 6
 Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 6 Tomasz Suchocki Uniwersytet Przyrodniczy we Wrocªawiu Katedra Genetyki i Ogólnej Hodowli Zwierz t Plan wykªadu Model mieszany
Modele liniowe i mieszane na przykªadzie analizy danych biologicznych - Wykªad 6 Tomasz Suchocki Uniwersytet Przyrodniczy we Wrocªawiu Katedra Genetyki i Ogólnej Hodowli Zwierz t Plan wykªadu Model mieszany