Sterowanie układem zawieszenia magnetycznego
|
|
|
- Juliusz Kuczyński
- 8 lat temu
- Przeglądów:
Transkrypt
1 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej Twardysko Promotor: dr inż. Zbigniew Ogonowski
2 Zawieszenie magnetyczne Idea zawieszenia magnetycznego staje się coraz popularniejsza i jest już obecnie wykorzystywana w bardzo wielu urządzeniach. Przede wszystkim zastępuje ono w wielu dziedzinach tradycyjne łożyska. Góruje nad nimi przede wszystkim znacznym zmniejszeniem tarcia w ruchu obrotowym i nie tylko oraz potrzebnej energii do napędzania np. wirników i zasilania.


3 Przykład Sprężarka Turbocor montowana w agregatach chłodniczych firmy RC GROUP :
4 Przykład c.d. Moc elektryczna potrzebna do zasilania sprężarki z zawieszeniem magnetycznym ok. 180 W Moc w porównywalnej klasycznej sprężarce potrzebna na pokonanie sił tarcia w łożyskach to ok W Ponieważ nie występuje tarcie nie ma problemu związanego z przegrzewaniem się elementów ruchomych
5 Cel Pracy: Opracowanie i zaimplementowanie różnego typu algorytmów sterowania dla rzeczywistego układu zawieszenia magnetycznego MBC 500
6 Stanowisko badawcze Układ zawieszenie magnetycznego MBC-500 Komputer PC z kartą DS1104 Układ sterowania ciśnieniem: Układ załączający on/off off Przetwornik ciśnienia Keller PA-21SR Kompresor Toya Układ sterowania prędkością: Koło napędowe z łopatkami Przeciwbieżne dysze Zawory Enkoder Układ elektroniczny

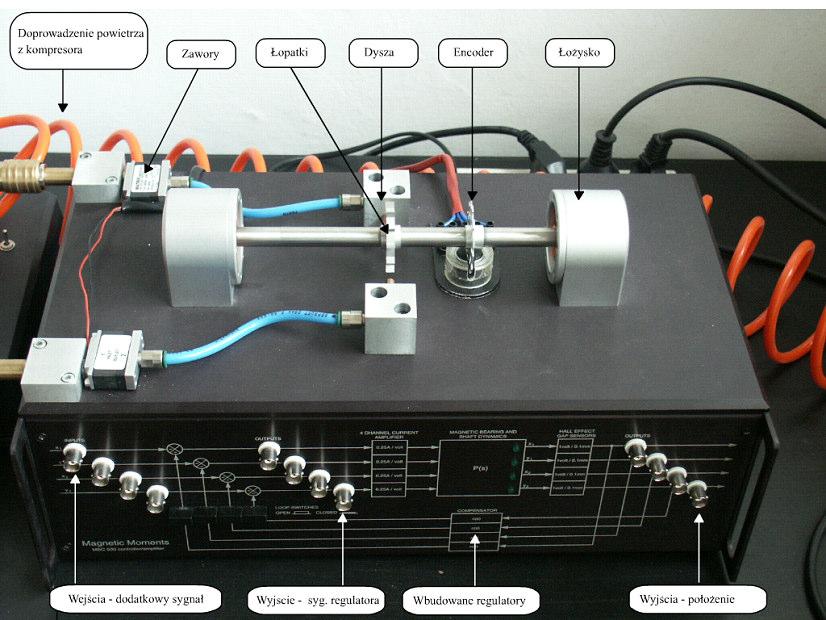
7 Budowa MBC-500
8 Budowa MBC-500 c.d.
9 Model fenomenologiczny zawieszenia magnetycznego Xo-przemieszczenie środka masy wirika x1,x2-przemieszczenie lewego i prawego końca wirnika (przy łożysku) X1,X2-przemieszczenie lewego i prawego końca wirnika (przy czujnikach hallotronowych) Θ-kąt odchylenia osi wirnika od położenia w stanie równowagi F1,F2-siły wynikające z oddziaływań poszczególnych łożysk magnetycznych L-całkowita długość wirnika l-odległość łożyska od końca wirnika l2-odległość czujników od końca wirnika m-masa
10 Model fenomenologiczny zawieszenia magnetycznego c.d. Z bilansu sił, momentów sił i zależności geometrycznych można wyprowadzić równana opisujące dynamikę układu:
11 Model fenomenologiczny zawieszenia magnetycznego c.d. Linearyzując funkcje sin(θ) ) i cos(θ) ) wokół punktu Θ=0, otrzymujemy opis układu w przestrzeni stanów:
12 Model fenomenologiczny zawieszenia magnetycznego c.d. Zależności pomiędzy siłami oddziaływującymi na łożysko a natężeniem prądu przepływającym przez uzwojenia jest następujące: gdzie: i controli -prąd płynący przez i-te uzwojenie
13 Model fenomenologiczny zawieszenia magnetycznego c.d. W układzie MBC-500 sygnałem sterującym jest napięcie, które jest przetwarzane przez wzmacniacze na prąd płynący przez uzwojenia elektromagnesów. Wzmacniacze wprowadzają dodatkowa dynamikę opisaną za pomocą następujących równań: gdzie: V controli [V] sterowanie i-tym uzwojeniem
14 Model fenomenologiczny zawieszenia magnetycznego c.d. Odchylenie X1 i X2 mierzone są czujnikami hallotronowymi, których wyjściem jest napięcie V sensei zależne od wartości odchyleń Xi zgodnie z równaniem: Dzięki tej zależności oraz funkcji przejścia C(s) każdego z wbudowanych regulatorów możemy wyznaczyć napięcie sterowania:
15 Główne etapy pracy: Przeprowadzenie symulacji i testów dla opracowanego modelu matematycznego, rozszerzenie o modele rezonansu, identyfikacja modeli liniowych lub ich obliczenie z linearyzacji Dobór odpowiednich algorytmów sterowania rozszerzenie algorytmów opracowanych dotąd (WMV, ster. Adapt.) Implementacja algorytmów adaptacyjnych na DSP przy pomocy matlaba Algorytmy sterowania drganiami zależne od układu sterowania obrotami Ewent. Dopracowanie alg. Sterowania obrotami.
16 Dotychczasowe badania Analiza prac już wykonanych na układzie MBC-500 Testowanie zaimplementowanych algorytmów sterowania prędkością Próby modyfikacji algorytmów śledzenia za zmianami wartości zadanej prędkości
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Problemy optymalizacji układów napędowych w automatyce i robotyce
 Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Akademia Górniczo-Hutnicza im. Stanisława Staszica Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Katedra Automatyki Autoreferat rozprawy doktorskiej Problemy optymalizacji układów napędowych
Autoreferat Rozprawy Doktorskiej
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie. Ćwiczenie 3 Dobór mikrosilnika prądu stałego do układu pozycjonującego
 Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Napędy elektromechaniczne urządzeń precyzyjnych - projektowanie Dobór mikrosilnika prądu stałego do układu pozycjonującego Precyzyjne pozycjonowanie robot chirurgiczny (2009) 39 silników prądu stałego
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Audi A > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L
 Odczyt bloku wartości mierzonych Audi A4 2001 > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L Mogą być wskazywane następujące bloki wartości mierzonych:
Odczyt bloku wartości mierzonych Audi A4 2001 > - automatyczna skrzynia biegów 09L Audi A4 Cabriolet 2003> - automatyczna skrzynia biegów 09L Mogą być wskazywane następujące bloki wartości mierzonych:
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego
 Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Jakub Wierciak Matematyczne modele mikrosilników elektrycznych - silniki prądu stałego Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Inteligentnych Systemów Sterowania
 Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
Laboratorium Inteligentnych Systemów Sterowania Mariusz Nowak Instytut Informatyki Politechnika Poznańska ver. 200.04-0 Poznań, 2009-200 Spis treści. Układ regulacji automatycznej z regulatorami klasycznymi
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Napędy urządzeń mechatronicznych
 1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
1. Na rysunku przedstawiono schemat blokowy układu wykonawczego z napędem elektrycznym. W poszczególne bloki schematu wpisać nazwy jego elementów oraz wskazanych sygnałów. Napędy urządzeń mechatronicznych
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną
 Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Zmiana punktu pracy wentylatorów dużej mocy z regulowaną prędkością obrotową w obiektach wytwarzających energię cieplną lub elektryczną Zbigniew Szulc 1. Wstęp Wentylatory dużej mocy (powyżej 500 kw stosowane
Mechatronika i inteligentne systemy produkcyjne. Sensory (czujniki)
") Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Mechatronika i inteligentne systemy produkcyjne Sensory (czujniki) 1 Zestawienie najważniejszych wielkości pomiarowych w układach mechatronicznych Położenie (pozycja), przemieszczenie Prędkość liniowa,
Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP
 Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP LEGENDA: 1 SPRĘŻARKA 2 ZBIORNIK GŁÓWNY 3 ZAWÓR ROZRZĄDCZY 4 WYLOT DO ATMOSFERY 5 CYLINDER HAMULCOWY -luzowanie hamulca -Hamowanie - odcięcie
Hamulce pneumatyczne PN oraz hamulce elektropneumatyczne EP LEGENDA: 1 SPRĘŻARKA 2 ZBIORNIK GŁÓWNY 3 ZAWÓR ROZRZĄDCZY 4 WYLOT DO ATMOSFERY 5 CYLINDER HAMULCOWY -luzowanie hamulca -Hamowanie - odcięcie
Rok akademicki: 2012/2013 Kod: EIB BR-s Punkty ECTS: 3. Kierunek: Inżynieria Biomedyczna Specjalność: Biomechanika i robotyka
 Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Nazwa modułu: Serwomechanizmy i zaawansowane systemy sterowania Rok akademicki: 2012/2013 Kod: EIB-2-103-BR-s Punkty ECTS: 3 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (2010/2011) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Ćwiczenie EA9 Czujniki położenia
 Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA9 Program ćwiczenia I. Transformator położenia kątowego 1. Wyznaczenie przekładni napięciowych 2. Pomiar napięć
Akademia Górniczo-Hutnicza im.s.staszica w Krakowie KATEDRA MASZYN ELEKTRYCZNYCH Ćwiczenie EA9 Program ćwiczenia I. Transformator położenia kątowego 1. Wyznaczenie przekładni napięciowych 2. Pomiar napięć
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r.
 TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r. Lp. 1. Opiekun pracy (imię i nazwisko, tytuł lub stopień naukowy) Temat, cel i zakres pracy Analiza bezszczotkowego silnika prądu stałego przeznaczonego
TEMATY PRAC DYPLOMOWYCH do wyboru w wiosna 2017 r. Lp. 1. Opiekun pracy (imię i nazwisko, tytuł lub stopień naukowy) Temat, cel i zakres pracy Analiza bezszczotkowego silnika prądu stałego przeznaczonego
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Podstawy Automatyki laboratorium
 Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
Cel ćwiczenia: Celem ćwiczenia jest uzyskanie wykresów charakterystyk skokowych członów róŝniczkujących mechanicznych i hydraulicznych oraz wyznaczenie w sposób teoretyczny i graficzny ich stałych czasowych.
Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16. dr inż. Łukasz Starzak
 Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Przetwarzanie energii elektrycznej w fotowoltaice lato 2015/16 dr inż. Łukasz Starzak Politechnika Łódzka Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki Katedra Mikroelektroniki i Technik
Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny
 Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny Recenzja rozprawy doktorskiej mgr. inż. Karola Tatara pt. Synteza regulatorów ślizgowych dla przetworników energoelektronicznych
Prof. dr hab. inż. Lech M. Grzesiak Politechnika Warszawska, Wydział Elektryczny Recenzja rozprawy doktorskiej mgr. inż. Karola Tatara pt. Synteza regulatorów ślizgowych dla przetworników energoelektronicznych
Opis efektów kształcenia dla modułu zajęć
 Nazwa modułu: Elektromechaniczne przetwarzanie energii Rok akademicki: 2012/2013 Kod: EEL-1-403-s Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Nazwa modułu: Elektromechaniczne przetwarzanie energii Rok akademicki: 2012/2013 Kod: EEL-1-403-s Punkty ECTS: 5 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach. Krzysztof Żurek Gdańsk,
 Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Modelowanie, sterowanie i symulacja manipulatora o odkształcalnych ramionach Krzysztof Żurek Gdańsk, 2015-06-10 Plan Prezentacji 1. Manipulatory. 2. Wprowadzenie do Metody Elementów Skończonych (MES).
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Modelowanie matematyczne elementów systemu sterowania (obwody elektryczne, mechaniczne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Modelowanie matematyczne elementów systemu sterowania (obwody elektryczne, mechaniczne
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Seria Jubileuszowa. Rozwiązania informatyczne. Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości. oszczędność energii. ochrona środowiska
 Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Sprężarki śrubowe Airpol PRM z przetwornicą częstotliwości Seria Jubileuszowa Każda sprężarka śrubowa z przetwornicą częstotliwości posiada regulację obrotów w zakresie od 50 do 100%. Jeżeli zużycie powietrza
Serwomechanizmy sterowanie
 Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Serwomechanizmy sterowanie Tryby pracy serwonapędu: - point-to-point, - śledzenie trajektorii (często znanej), - regulacja prędkości. Wymagania: - odpowiedź aperiodyczna, - możliwość ograniczania przyspieszenia
Podstawy automatyki. Energetyka Sem. V Wykład 1. Sem /17 Hossein Ghaemi
 Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
Podstawy automatyki Energetyka Sem. V Wykład 1 Sem. 1-2016/17 Hossein Ghaemi Hossein Ghaemi Katedra Automatyki i Energetyki Wydział Oceanotechniki i Okrętownictwa Politechnika Gdańska pok. 222A WOiO Tel.:
60 więcej na
 3. wentylator DACHOWY WD-EC Wentylatory dachowe WD-EC wyposażone zostały w silniki elektronicznie komutowane, jednofazowe 230V, 50Hz lub trójfazowe 3 x V, 50Hz o stopniu ochrony IP54. Są to silniki trzeciej
3. wentylator DACHOWY WD-EC Wentylatory dachowe WD-EC wyposażone zostały w silniki elektronicznie komutowane, jednofazowe 230V, 50Hz lub trójfazowe 3 x V, 50Hz o stopniu ochrony IP54. Są to silniki trzeciej
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 24/18. PRZEMYSŁAW FILIPEK, Lublin, PL WUP 06/19. rzecz. pat.
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 232308 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 426279 (22) Data zgłoszenia: 09.07.2018 (51) Int.Cl. F04C 18/00 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 232308 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 426279 (22) Data zgłoszenia: 09.07.2018 (51) Int.Cl. F04C 18/00 (2006.01)
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Modelowanie matematyczne elementów systemu sterowania (obwody elektryczne, mechaniczne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Modelowanie matematyczne elementów systemu sterowania (obwody elektryczne, mechaniczne
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
SILNIKI PRĄDU STAŁEGO SERII G
 SILNIKI PRĄDU STAŁEGO SERII G Ogólna charakterystyka serii Silniki prądu stałego serii G przystosowane są do zasilania z przekształtników tyrystorowych. Wykonywane są jako silniki obcowzbudne w stopniu
SILNIKI PRĄDU STAŁEGO SERII G Ogólna charakterystyka serii Silniki prądu stałego serii G przystosowane są do zasilania z przekształtników tyrystorowych. Wykonywane są jako silniki obcowzbudne w stopniu
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Modelowanie układów dynamicznych
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Laboratorium Maszyny CNC
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 5 Badanie dynamiki pozycjonowania stołu obrotowego w zakresie małych przemieszczeń Opracował: mgr inż. Krzysztof Netter
Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów
 Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
Laboratorium Metod Optymalizacji 216 Metody Optymalizacji Laboratorium nr 4 Metoda najmniejszych kwadratów 1. Za pomocą funkcji lsqcurvefit dobrać parametry a i b funkcji: Posiadając następujące dane pomiarowe:
MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium. Ćwiczenie 2
 MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium Ćwiczenie Hamulec magnetoreologiczny Katedra Automatyzacji Procesów Wydział Inżynierii Mechanicznej i Robotyki Akademia Górniczo-Hutnicza Ćwiczenie Cele:
MATERIAŁY I KONSTRUKCJE INTELIGENTNE Laboratorium Ćwiczenie Hamulec magnetoreologiczny Katedra Automatyzacji Procesów Wydział Inżynierii Mechanicznej i Robotyki Akademia Górniczo-Hutnicza Ćwiczenie Cele:
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
Odczytywanie bloku wartości mierzonych. Audi Q7 2007> - Automatyczna skrzynia biegów 09D
 Odczytywanie bloku wartości mierzonych Audi Q7 2007> - Automatyczna skrzynia biegów 09D Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań 1: obroty silnika (0 do
Odczytywanie bloku wartości mierzonych Audi Q7 2007> - Automatyczna skrzynia biegów 09D Mogą być wskazywane następujące bloki wartości mierzonych: Grupa wskazań 001: Pole wskazań 1: obroty silnika (0 do
Podstawy Elektrotechniki i Elektroniki. Opracował: Mgr inż. Marek Staude
 Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Podstawy Elektrotechniki i Elektroniki Opracował: Mgr inż. Marek Staude Wiadomości do tej pory Podstawowe pojęcia Elementy bierne Podstawowe prawa obwodów elektrycznych Moc w układach 1-fazowych Pomiary
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Struktura układu pomiarowego drgań mechanicznych
 Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Wstęp Diagnostyka eksploatacyjna maszyn opiera się na obserwacji oraz analizie sygnału uzyskiwanego za pomocą systemu pomiarowego. Pomiar sygnału jest więc ważnym, integralnym jej elementem. Struktura
Regulacja dwupołożeniowa.
 Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
Politechnika Krakowska Wydział Inżynierii Elektrycznej i Komputerowej Zakład eorii Sterowania Regulacja dwupołożeniowa. Kraków Zakład eorii Sterowania (E ) Regulacja dwupołożeniowa opis ćwiczenia.. Opis
KARTA KATALOGOWA SILNIKÓW PRĄDU STAŁEGO
 KARTA KATALOGOWA SILNIKÓW PRĄDU STAŁEGO 1. OGÓLNA CHARAKTERYSTYKA SERII Silniki prądu stałego serii G przystosowane są do zasilania z przekształtników tyrystorowych. Wykonywane są jako silniki obcowzbudne
KARTA KATALOGOWA SILNIKÓW PRĄDU STAŁEGO 1. OGÓLNA CHARAKTERYSTYKA SERII Silniki prądu stałego serii G przystosowane są do zasilania z przekształtników tyrystorowych. Wykonywane są jako silniki obcowzbudne
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Nazwisko i imię: Zespół: Data: Ćwiczenie nr 1: Wahadło fizyczne. opis ruchu drgającego a w szczególności drgań wahadła fizycznego
 Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Nazwisko i imię: Zespół: Data: Cel ćwiczenia: Ćwiczenie nr 1: Wahadło fizyczne opis ruchu drgającego a w szczególności drgań wahadła fizycznego wyznaczenie momentów bezwładności brył sztywnych Literatura
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
semestralny wymiar godzin PLAN STUDIÓW - STUDIA STACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 20 20 40 4 egz. 2 Analiza matematyczna 40 40 80 8 egz. 3 Ergonomia i BHP
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
Efekty kształcenia na kierunku AiR drugiego stopnia - Wiedza Wydziału Elektrotechniki, Automatyki i Informatyki Politechniki Opolskiej
 Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Efekty na kierunku AiR drugiego stopnia - Wiedza K_W01 K_W02 K_W03 K_W04 K_W05 K_W06 K_W07 K_W08 K_W09 K_W10 K_W11 K_W12 K_W13 K_W14 Ma rozszerzoną wiedzę dotyczącą dynamicznych modeli dyskretnych stosowanych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Badanie i synteza kaskadowego adaptacyjnego układu regulacji do sterowania obiektu o
PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka. semestralny wymiar godzin. Semestr 1. Semestr 2. Semestr 3.
 semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
semestralny wymiar godzin PLAN STUDIÓW - STUDIA NIESTACJONARNE I STOPNIA kierunek: automatyka i robotyka Semestr 1 1 Algebra liniowa 12 12 24 4 egz. 2 Analiza matematyczna 24 24 48 8 egz. 3 Ergonomia i
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Bezczujnikowe sterowanie SPMSM
 XLV SESJA STUDENCKICH KÓŁ NAUKOWYCH KOŁO NAUKOWE MAGNESIK Bezczujnikowe sterowanie SPMSM ] Wykonał: Miłosz Handzel Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. n. AGH PMSM (ys. 1) kontra IM
XLV SESJA STUDENCKICH KÓŁ NAUKOWYCH KOŁO NAUKOWE MAGNESIK Bezczujnikowe sterowanie SPMSM ] Wykonał: Miłosz Handzel Opiekun naukowy: dr hab. inż. Wiesław Jażdżyński, prof. n. AGH PMSM (ys. 1) kontra IM
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH
 AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
AUTOMATYZACJA PROCESÓW CIĄGŁYCH I WSADOWYCH kierunek Automatyka i Robotyka Studia II stopnia specjalności Automatyka Dr inż. Zbigniew Ogonowski Instytut Automatyki, Politechnika Śląska Plan wykładu pojęcia
Ćwiczenie 4. Dobór elektromagnesu do układu wykonawczego
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Ćwiczenie 4 Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Ćwiczenie 4 Instrukcja Człowiek - najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu
PNEUMATYCZNA TECHNIKA PROPORCJONALNA
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy w aparatach instalacji chłodniczych.
 POLITECHNIKA GDAŃSKA Wydział Mechaniczny Katedra Techniki Cieplnej SEMINARIUM Z PRZEDMIOTU AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy
POLITECHNIKA GDAŃSKA Wydział Mechaniczny Katedra Techniki Cieplnej SEMINARIUM Z PRZEDMIOTU AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sondy pojemnościowe nowoczesnym elementem do regulacji poziomu cieczy
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Gdańska
 Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
WAT - WYDZIAŁ ELEKTRONIKI INSTYTUT SYSTEMÓW ELEKTRONICZNYCH. Przedmiot: CZUJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE
 Grupa: WAT - WYDZIAŁ ELEKTRONIKI INSTYTT SYSTEMÓW ELEKTRONICZNYCH Przedmiot: CZJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE Temat: Przetworniki tensometryczne /POMIARY SIŁ I CIŚNIEŃ PRZY
Grupa: WAT - WYDZIAŁ ELEKTRONIKI INSTYTT SYSTEMÓW ELEKTRONICZNYCH Przedmiot: CZJNIKI I PRZETWORNIKI Ćwiczenie nr 1 PROTOKÓŁ / SPRAWOZDANIE Temat: Przetworniki tensometryczne /POMIARY SIŁ I CIŚNIEŃ PRZY
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Symulacja pojedynczego stopnia swobody robota manipulacyjnego
 POLITECHNIKA WARSZAWSKA Rok akademicki 1/13 WYDZIAŁ ELEKTRONIKI I TECHNIK INFORMACYJNYCH INSTYTUT AUTOMATYKI I INFORMATYKI STOSOWANEJ PRACA DYPLOMOWA INŻYNIERSKA Bartosz Wojciech Świstak Symulacja pojedynczego
POLITECHNIKA WARSZAWSKA Rok akademicki 1/13 WYDZIAŁ ELEKTRONIKI I TECHNIK INFORMACYJNYCH INSTYTUT AUTOMATYKI I INFORMATYKI STOSOWANEJ PRACA DYPLOMOWA INŻYNIERSKA Bartosz Wojciech Świstak Symulacja pojedynczego
Modelowanie jako sposób opisu rzeczywistości. Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka
 Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Modelowanie jako sposób opisu rzeczywistości Katedra Mikroelektroniki i Technik Informatycznych Politechnika Łódzka 2015 Wprowadzenie: Modelowanie i symulacja PROBLEM: Podstawowy problem z opisem otaczającej
Automatyka i metrologia
 Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Kierunek Elektrotechnika Specjalność: Automatyka i metrologia http://www.automatyka.p.lodz.pl/ http://www.metrol.p.lodz.pl/ 1/35 Wykształcenie wszechstronne nowoczesne dobrze rozpoznawalne na rynku pracy
Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap
 Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI
 W CELU JEGO OPTYMALIZACJI") Michał Majchrowicz *, Wiesław Jażdżyński ** OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI 1. WSTĘP Silniki reluktancyjne przełączalne ze względu na swoje liczne
Michał Majchrowicz *, Wiesław Jażdżyński ** OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI 1. WSTĘP Silniki reluktancyjne przełączalne ze względu na swoje liczne
Pomiar prędkości obrotowej
 2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
2.3.2. Pomiar prędkości obrotowej Metody: Kontaktowe mechaniczne (prądniczki tachometryczne różnych typów), Bezkontaktowe: optyczne (światło widzialne, podczerwień, laser), elektromagnetyczne (indukcyjne,
1. Wiadomości ogólne 1
 Od Wydawcy xi 1. Wiadomości ogólne 1 dr inż. Stefan Niestępski 1.1. Jednostki miar 2 1.2. Rysunek techniczny 8 1.2.1. Formaty arkuszy, linie rysunkowe i pismo techniczne 8 1.2.2. Symbole graficzne 10 1.3.
Od Wydawcy xi 1. Wiadomości ogólne 1 dr inż. Stefan Niestępski 1.1. Jednostki miar 2 1.2. Rysunek techniczny 8 1.2.1. Formaty arkuszy, linie rysunkowe i pismo techniczne 8 1.2.2. Symbole graficzne 10 1.3.