Projekt i wykonanie robota klasy Micromouse
|
|
|
- Fabian Henryk Wierzbicki
- 6 lat temu
- Przeglądów:
Transkrypt
1 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL
2 Wstęp

3 Cel pracy Celem projektu jest zaprojektowanie oraz wykonanie robota klasy Micromouse, który będzie poruszał się po labiryncie w sposób autonomiczny.
4 Zakres pracy Zdefiniowanie założeń Analiza istniejących rozwiązań Opracowanie projektu układów mechanicznego, elektronicznego, zasilania Wykonanie układów zgodnie z opracowanymi projektami Opracowanie oprogramowania do obsługi układów sensorycznych i wykonawczych Weryfikacja działania robota, analiza wyników i sformułowanie wniosków
5 Zdefiniowanie założeń Autonomiczność Zbieranie i przetwarzanie informacji o środowisku Poruszanie się w sposób kontrolowany Komunikacja z użytkownikiem Minimalne wymiary

 Zasilanie 120mah LiPo 2s1p Czujnik")
 Zasilanie 300mah 45C LiPo 2S1P (7.")


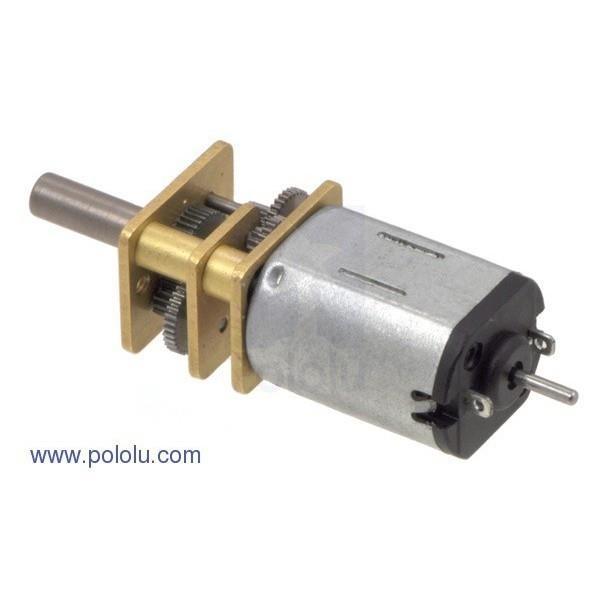
6 Analiza istniejących rozwiązań Robot Rozwiązania Fotografia Green Giant V4.2 Green Giant 5.19V Czujnik odległości TEFT4300+SFH4545 Enkoder Zintegrowany IE2 512 Mikrokontroler Silniki STM32F405RGT6 Fauhalber 1717R(6V) Zasilanie 120mah LiPo 2s1p Czujnik odległości TEFT4300+SFH4550 Enkoder Zintegrowany IE2 512 Mikrokontroler STM32F405RG Silniki Fauhalber 1717R(6V) Zasilanie 300mah 45C LiPo 2S1P (7.4V) Didi Let Me Out Rapid Czujnik odległości SFH4550+SFH313FA Enkoder Magnetyczny AS5040 Mikrokontroler STM32F103RBT6 Silniki DC Micro Pololu HP Zasilanie LiPo 7.4V Czujnik odległości SFH4550+SFH313FA Enkoder Brak Mikrokontroler AVR Atmega 128 Silniki Krokowe S20STH A Zasilanie Li-Po 7.4 V 250mAh Czujnik odległości SFH4511+TEFT4300 Enkoder Magnetyczny AS5304 Mikrokontroler STM32F405RGT6 Silniki DC Micro Pololu HP 10:1 Zasilanie Li-Po 7.4 V


7 Opracowanie projektu układu mechanicznego

8 Opracowanie układu elektronicznego układ logiczny

9 Opracowanie układu elektronicznego czujnik odległości TSAL6400 LIRT5B


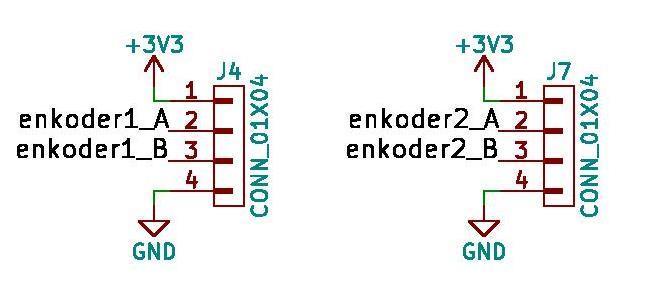
10 Opracowanie układu elektronicznego - enkodery



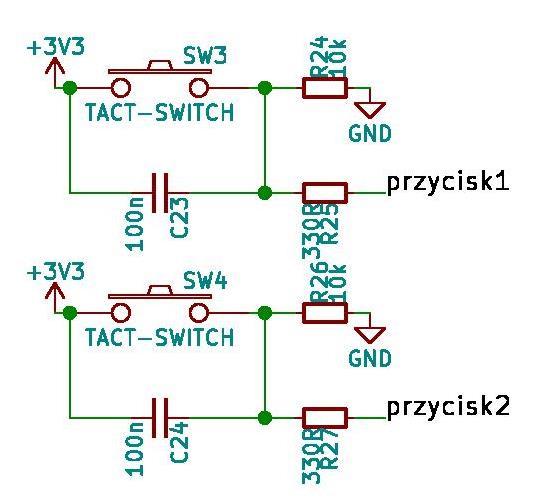

11 Opracowanie układu elektronicznego - komunikacja USART SWD Przyciski operacyjne USB I2C Dioda trybu

12 Opracowanie układu elektronicznego - sterowanie



13 Opracowanie układu zasilania

14 Wykonanie układów zgodnie z opracowanymi projektami


15 Wykonanie układów zgodnie z opracowanymi projektami

16 Wykonanie układów zgodnie z opracowanymi projektami
17 Opracowanie oprogramowania 0 wybór kierunku ruchu: w tył, 1 wybór kierunku ruchu: w przód, 2 wybór prędkości. Należy podawać jako wartość PWM (liczba całkowita z zakresu 0-255), 3 obroty w prawo, 4 obroty w lewo, 5 stop.
18 Weryfikacja działania robota, analiza wyników i wnioski Sprawdzenie czy robot poprawnie reaguje na komendy zaimplementowane w kodzie, Analiza zależności pomiędzy wartością napięcia zwracaną przez czujniki odległości, a dystansem do przeszkody, Sprawdzenie czy prędkości obrotowe silnika prawego i lewego są takie same (czy robot jeździ po linii prostej) dla różnych wartości PWM.

19 Weryfikacja reakcje na komendy

20 Wartość odczytywana Wartość odczytywana Weryfikacja analiza wartości z czujników odległości czujniki 0, 1, 4, Wartosć odległości [cm] czujniki 2, Wartosć odległości [cm]
![Weryfikacja prostoliniowość ruchu Sygnał PWM 50 100 150 200 Odległość od krawędzi: [mm] Droga przebyta [mm] Lewej Prawej 620 25 75](/docs-images/99/139751843/images/21-5.jpg "635 40 60 625 10 90 1160-320 420 1180-320 420 1090-420 520 1620-470 570 1580-520 620 1630-325 425 1610-120 220 1580-350 450 1600-260")
21 Weryfikacja prostoliniowość ruchu Sygnał PWM Odległość od krawędzi: [mm] Droga przebyta [mm] Lewej Prawej
22 Podsumowanie Opracowano układy mechaniczny, elektroniczny, zasilania. Wykonano robota zgodnie z projektem. Opracowano oprogramowanie sterujące. Zweryfikowano działanie robota.
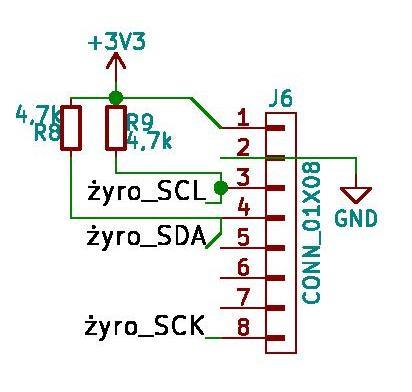
23 Kontynuacja projektu Rozwój oprogramowania sterującego poprzez dodanie regulatora PID, który pozwoli na korekcję toru jazdy robota, dodanie algorytmu przeszukiwania labiryntu oraz autonomicznego sterowania robotem, usprawnienie istniejącego oprogramowania Dodanie żyroskopu, którym będzie można kontrolować kąt obrotu robota, Zaimplementowanie sposobu filtracji danych z sensorów, Dodanie układu chroniącego układ przed zwarciem, przepięciem lub odwrotnym podłączeniem baterii.
24 Dziękuję za uwagę.

25
26
Konstrukcja Micro Mouse
 Konstrukcja Micro Mouse Hubert Grzegorczyk 13 października 2016 Hubert Grzegorczyk Konstrukcja Micro Mouse 13 października 2016 1 / 8 Przykładowa konstrukcja Rysunek: Topowa konstrukcja japońska Min7.1
Konstrukcja Micro Mouse Hubert Grzegorczyk 13 października 2016 Hubert Grzegorczyk Konstrukcja Micro Mouse 13 października 2016 1 / 8 Przykładowa konstrukcja Rysunek: Topowa konstrukcja japońska Min7.1
Zastosowanie silników krokowych jako napęd robota mobilnego
 Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Zastosowanie silników krokowych jako napęd robota mobilnego Bartłomiej Kurosz 22 maja 2015 Bartłomiej Kurosz Napędy robotów mobilnych 22 maja 2015 1 / 48 Wstęp Tytuł Badanie sprawności napędu robota mobilnego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Raport z budowy robota typu Linefollower Mały. Marcin Węgrzyn
 Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Raport z budowy robota typu Linefollower Mały Marcin Węgrzyn Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 5 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Robot 2 2.1 Konstrukcja............................
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Micromouse Rapid Raport końcowy. Marcin Niestrój
 Micromouse Rapid Raport końcowy Marcin Niestrój Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 22 stycznia 2013 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja mechaniczna 2 2.1 Podwozie.............................
Micromouse Rapid Raport końcowy Marcin Niestrój Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 22 stycznia 2013 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja mechaniczna 2 2.1 Podwozie.............................
Raport z budowy robota Krzysio
 Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Raport z budowy robota Krzysio Bartosz Kolasa Adrian Szymański Piotr Andrzejak Radosław Grymin Politechnika Wrocławska Wydział Elektroniki 14 marca 2011 Spis treści 1 Wprowadzenie 2 2 Konstrukcja 2 3 Zasilanie
Podstawy budowy robotów
 Podstawy budowy robotów Kamil Rosiński KoNaR 15.10.2015 Kamil Rosiński (KoNaR) Podstawy budowy robotów 15.10.2015 1 / 18 Spis treści 1 Przepisy Konkurencja Line Follower Light 2 Budowa robota Istotne szczegóły
Podstawy budowy robotów Kamil Rosiński KoNaR 15.10.2015 Kamil Rosiński (KoNaR) Podstawy budowy robotów 15.10.2015 1 / 18 Spis treści 1 Przepisy Konkurencja Line Follower Light 2 Budowa robota Istotne szczegóły
Stworzenie prototypu robota, pomagającego ludziom w codziennym życiu
 Stworzenie prototypu robota, pomagającego ludziom w codziennym życiu Projekt zrealizowany w ramach Mazowieckiego programu stypendialnego dla uczniów szczególnie uzdolnionych najlepsza inwestycja w człowieka
Stworzenie prototypu robota, pomagającego ludziom w codziennym życiu Projekt zrealizowany w ramach Mazowieckiego programu stypendialnego dla uczniów szczególnie uzdolnionych najlepsza inwestycja w człowieka
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MOBOT RoboSnake. Moduł wieloczłonowego robota
 MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
MOBOT RoboSnake Moduł wieloczłonowego robota Instrukcja obsługi i montażu P.P.H. WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl
Linefollower Torpeda. Magdalena Kaczorowska
 Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
Linefollower Torpeda Magdalena Kaczorowska Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Rozwinięcie 2 2.1 Mechanika.............................
- WALKER Czteronożny robot kroczący
 - WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
- WALKER Czteronożny robot kroczący Wiktor Wysocki 2011 1. Wstęp X-walker jest czteronożnym robotem kroczącym o symetrycznej konstrukcji. Został zaprojektowany jako robot którego zadaniem będzie przejście
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI. Robot do pokrycia powierzchni terenu
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA AUTOMATYKI Robot do pokrycia powierzchni terenu Zadania robota Zadanie całkowitego pokrycia powierzchni na podstawie danych sensorycznych Zadanie unikania przeszkód
mbot Ranger Robot edukacyjny 3-w-1
 mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
mbot Ranger Robot edukacyjny 3-w-1 Makeblock Co., Ltd. Technical Support: tec-support@makeblock.com www.makeblock.com Robot balansujący Dystrybucja i serwis w Polsce: www.trobot.pl roboty edukacyjne Robot-czołg
Szczegółowy Opis Przedmiotu Zamówienia- Część I
 Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
Szczegółowy Opis Przedmiotu Zamówienia- Część I Warunki dostawy 1. Sterowniki zostaną dostarczone na koszt Wykonawcy do Centrum Kształcenia Praktycznego, przy ul. Św. Józefa 26 w Toruniu 2. Odbiór sprzętu
NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu
 NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu Zdalnie sterowany dron z funkcją obracania 180 i 360 oraz skakania do 80 cm wysokości. Wyposażony
NAZWA PRODUKTU: Skaczący dron robot Bounce Car z kamerą Wi-Fi sterowany ze smartfona Y136 Cechy produktu Zdalnie sterowany dron z funkcją obracania 180 i 360 oraz skakania do 80 cm wysokości. Wyposażony
Szczegółowy Opis Przedmiotu Zamówienia
 Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
Szczegółowy Opis Przedmiotu Zamówienia Zamawiający dopuszcza oprogramowanie do sterowników w języku innym niż polski. Przedmiot zmówienia będzie wykorzystywany do celów wyłącznie edukacyjnych, niekomercyjnych.
MozhePoyedzye. Robot klasy MiniSumo. Konrad Bednarek Michał Rataj
 MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
MozhePoyedzye Robot klasy MiniSumo Konrad Bednarek Michał Rataj Koło Naukowe Robotyków KoNaR www.konar.pwr.edu.pl 6 stycznia 2016 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Konstrukcja 2 2.1 Mechanika.............................
NAZWA PRODUKTU: Interaktywny ROBOT OLBRZYM K1 Walczy Strzela Y73 Cechy produktu
 NAZWA PRODUKTU: Interaktywny ROBOT OLBRZYM K1 Walczy Strzela Y73 Cechy produktu Obraca się w prawo i w lewo Jeździ do przodu i do tyłu Chodzi w lewo i w prawo, do przodu i do tyłu Mówi w języku robota
NAZWA PRODUKTU: Interaktywny ROBOT OLBRZYM K1 Walczy Strzela Y73 Cechy produktu Obraca się w prawo i w lewo Jeździ do przodu i do tyłu Chodzi w lewo i w prawo, do przodu i do tyłu Mówi w języku robota
TIGER Autonomiczny robot mobilny typu Line Follower
 TIGER Autonomiczny robot mobilny typu Line Follower Sebastian Sadurski Marcin Stolarek Koło Naukowe Robotyków KoNaR Wrocław, 2012r. 1.Wstęp...3 2.Konstrukcja robota...3 3.Zasilanie...5 4.Mikrokontroler
TIGER Autonomiczny robot mobilny typu Line Follower Sebastian Sadurski Marcin Stolarek Koło Naukowe Robotyków KoNaR Wrocław, 2012r. 1.Wstęp...3 2.Konstrukcja robota...3 3.Zasilanie...5 4.Mikrokontroler
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych. Autor: Tomasz Gluziński
 Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU
 P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
P O L I T E C H N I K A P O Z N A Ń S K A Praca magisterska ROBOT MOBILNY ZBIERAJĄCY INFORMACJE O POMIESZCZENIU Promotor: dr inż. Dariusz Sędziak inż. Maciej Ciechanowski Poznań 2016 Cel pracy: CEL I ZAKRES
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Raport Robot mobilny klasy micromouse. Adrian Gałęziowski Paweł Urbaniak
 Raport Robot mobilny klasy micromouse Adrian Gałęziowski Paweł Urbaniak Wrocław, 12 marca 2013 Spis treści 1. Założenia projektu.................................... 2 2. Model w programie Autodeksk Inventor.......................
Raport Robot mobilny klasy micromouse Adrian Gałęziowski Paweł Urbaniak Wrocław, 12 marca 2013 Spis treści 1. Założenia projektu.................................... 2 2. Model w programie Autodeksk Inventor.......................
Autonomiczny robot mobilny LF3 klasy linefollower. Jacek Jankowski
 Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
Autonomiczny robot mobilny LF3 klasy linefollower Jacek Jankowski Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl 16 marca 2014 SPIS TREŚCI SPIS TREŚCI Spis treści 1 Wstęp 2 2 Założenia projektu 2 3
1 105,07 PLN brutto 898,43 PLN netto
 Xiaomi Mi Robot Vacuum Cleaner Robot Sprzątający Odkurzacz Biały 1 105,07 PLN brutto 898,43 PLN netto Producent: XIAOMI Xiaomi MiJia Roborock Mi Robot Vacuum Cleaner White Inteligentny odkurzacz do domu
Xiaomi Mi Robot Vacuum Cleaner Robot Sprzątający Odkurzacz Biały 1 105,07 PLN brutto 898,43 PLN netto Producent: XIAOMI Xiaomi MiJia Roborock Mi Robot Vacuum Cleaner White Inteligentny odkurzacz do domu
W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM
 Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
Pracownia Elektroniki Cyfrowej Programowanie CAD/CAM W semestrze letnim studenci kierunku Aplikacje Internetu Rzeczy podczas ćwiczeń z programowania CAD/CAM projektowali modele 3d. Wykorzystywali do tego
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu. Jakub Stanisz
 WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
WIZUALIZACJA DANYCH SENSORYCZNYCH Sprawozdanie z wykonanego projektu Jakub Stanisz 19 czerwca 2008 1 Wstęp Celem mojego projektu było stworzenie dalmierza, opierającego się na czujniku PSD. Zadaniem dalmierza
Analogowy sterownik silnika krokowego oparty na układzie avt 1314
 Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
Katedra Energoelektroniki i Automatyki Systemów Przetwarzania Energii 51 Konferencja Studenckich Kół Naukowych Bartłomiej Dąbek Adrian Durak - Elektrotechnika 3 rok - Elektrotechnika 3 rok Analogowy sterownik
STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER
 ROBOT KLASY LINEFOLLOWER") 30042012 Wrocław STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER Prowadzący: Mgr inż Jan Kędzierski Wykonawca: Michał Chrzanowski 180588 Sterowniki robotów (projekt) Strona 1 1 Wstęp Celem projektu
30042012 Wrocław STEROWNIKI ROBOTÓW ( PROJEKT ) ROBOT KLASY LINEFOLLOWER Prowadzący: Mgr inż Jan Kędzierski Wykonawca: Michał Chrzanowski 180588 Sterowniki robotów (projekt) Strona 1 1 Wstęp Celem projektu
Spis treści. Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
STEROWANIE ROBOTEM MOBILNYM TYPU LINE-FOLLOWER
 Tomasz Zając, Dawid Cekus (opiekun Koła Naukowego Komputerowego Projektowania Urządzeń Mechatronicznych i Maszyn ) Politechnika Częstochowska STEROWANIE ROBOTEM MOBILNYM TYPU LINE-FOLLOWER Streszczenie:
Tomasz Zając, Dawid Cekus (opiekun Koła Naukowego Komputerowego Projektowania Urządzeń Mechatronicznych i Maszyn ) Politechnika Częstochowska STEROWANIE ROBOTEM MOBILNYM TYPU LINE-FOLLOWER Streszczenie:
PRACA DYPLOMOWA MAGISTERSKA
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania PRACA DYPLOMOWA MAGISTERSKA Konstrukcja autonomicznego robota mobilnego Małgorzata Bartoszewicz Promotor: prof. dr hab. inż. A. Milecki Zakres
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny
 Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
INSTRU KCJA UŻYTKOWNIKA
 INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
INSTRU KCJA UŻYTKOWNIKA 1 Spis treści 1. Elementy zestawu... 3 2. Instalacja baterii... 5 a. W kontrolerze... 5 b. W joysticku... 5 3. Podłączenie urządzeń... 6 4. Podłączenie kontrolera do komputera.
Sterowanie układem zawieszenia magnetycznego
 Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Politechnika Śląska w Gliwicach Wydział: Automatyki, Elektroniki i Informatyki Kierunek: Automatyka i Robotyka Specjalność: Komputerowe systemy sterowania Sterowanie układem zawieszenia magnetycznego Maciej
Podstawy PLC. Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń.
 Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Podstawy PLC Programowalny sterownik logiczny PLC to mikroprocesorowy układ sterowania stosowany do automatyzacji procesów i urządzeń. WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program
Enkoder magnetyczny AS5040.
 Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
Enkoder magnetyczny AS5040. Edgar Ostrowski Jan Kędzierski www.konar.ict.pwr.wroc.pl Wrocław, 28.01.2007 1 Spis treści 1 Wstęp... 3 2 Opis wyjść... 4 3 Tryby pracy... 4 3.1 Tryb wyjść kwadraturowych...
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Autoreferat Rozprawy Doktorskiej
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Autoreferat Rozprawy Doktorskiej Krzysztof Kogut Real-time control
Touch button module. Moduł przycisku dotykowy z podświetleniem LED
 Touch button module Moduł przycisku dotykowy z podświetleniem LED 1 S t r o n a 1. Opis ogólny Moduł dotykowy został zaprojektowany jako tania alternatywa dostępnych przemysłowych przycisków dotykowych.
Touch button module Moduł przycisku dotykowy z podświetleniem LED 1 S t r o n a 1. Opis ogólny Moduł dotykowy został zaprojektowany jako tania alternatywa dostępnych przemysłowych przycisków dotykowych.
Falowniki Wektorowe Rexroth Fv Parametryzacja
 Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
Rexroth Fv Falowniki Wektorowe Rexroth Fv Parametryzacja 1 Rexroth Fv 2 3 Częstotl. wyjściowa Prędkość wyjściowa Częstotl. odniesienia Ustalanie przez użytk. Częstotl. wyj. Naciśnij Func b Naciśnij Set
DEKODER DDC. 1). Adres lokomotywy. - Adres krótki i długi. CV1 Do 127
. Adres lokomotywy. - Adres krótki i długi. CV1 Do 127") DEKODER DDC Dekoder jazdy DJ1 v.10 Standard NMRA kompensacja obciążenia maksymalne napięcie wejściowe 24V prąd silnika 1 A (chwilowy 1,5 A) trzy wyjścia funkcyjne, każde do 200 ma wtyk z kablami NEM 652
DEKODER DDC Dekoder jazdy DJ1 v.10 Standard NMRA kompensacja obciążenia maksymalne napięcie wejściowe 24V prąd silnika 1 A (chwilowy 1,5 A) trzy wyjścia funkcyjne, każde do 200 ma wtyk z kablami NEM 652
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI
 Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
Bartosz Wawrzynek I rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy PROJECT OF FM TUNER WITH GESTURE CONTROL PROJEKT TUNERA FM STEROWANEGO GESTAMI Keywords: gesture control,
REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA ROBOTA W KATEGORII MICROMOUSE
 REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA 1. Informacje ogólne ROBOTA W KATEGORII MICROMOUSE 1. Celem konkursu jest sprawdzenie wiedzy technicznej w zakresie projektowania
REGULAMIN KONKURSU WIEDZY TECHNICZNEJ W ZAKRESIE PROJEKTOWANIA I KONSTRUOWANIA 1. Informacje ogólne ROBOTA W KATEGORII MICROMOUSE 1. Celem konkursu jest sprawdzenie wiedzy technicznej w zakresie projektowania
Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100. Zestaw do samodzielnego montażu.
 E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
E113 microkit Edukacyjny sterownik silnika krokowego z mikrokontrolerem AT90S1200 na płycie E100 1.Opis ogólny. Zestaw do samodzielnego montażu. Edukacyjny sterownik silnika krokowego przeznaczony jest
Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD2), ciśnieniem (LRPD2) i pozycją (LRXD2)
, ciśnieniem (LRPD2) i pozycją (LRXD2)") > Seria LR - cyfrowe serwozawory proporcjonalne Seria LR cyfrowe serwozawory proporcjonalne Nowość Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD), ciśnieniem (LRPD)
> Seria LR - cyfrowe serwozawory proporcjonalne Seria LR cyfrowe serwozawory proporcjonalne Nowość Serwozawory 3/3 sterowane bezpośrednio przeznaczone do sterowania przepływem (LRWD), ciśnieniem (LRPD)
PRACA PRZEJŚCIOWA SYMULACYJNA. Zadania projektowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA PRACA PRZEJŚCIOWA SYMULACYJNA Zadania projektowe dr inż. Roland PAWLICZEK Praca przejściowa symulacyjna 1 Układ pracy 1. Strona tytułowa
Robot mobilny klasy mini-sumo Żubr
 Robot mobilny klasy mini-sumo Żubr Autorzy: Grzegorz Biziel Marcin Motowidło Jan Słowik 1. Założenia i cel projektu. Głównym celem projektu było skonstruowanie robota spełniającego kryteria klasy robotów
Robot mobilny klasy mini-sumo Żubr Autorzy: Grzegorz Biziel Marcin Motowidło Jan Słowik 1. Założenia i cel projektu. Głównym celem projektu było skonstruowanie robota spełniającego kryteria klasy robotów
Instrukcja obsługi AP3.8.4 Adapter portu LPT
 Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
Instrukcja obsługi AP3.8.4 Adapter portu LPT P.P.H. WObit E.K.J. Ober s.c. 62-045 Pniewy, Dęborzyce 16 tel.48 61 22 27 422, fax. 48 61 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl SPIS TREŚCI
ZAWARTOŚĆ WYMIANA BATERII W DRONIE ŁADOWANIE BATERII PRZYGOTOWANIE DO LOTU
 ZAWARTOŚĆ WYMIANA BATERII W DRONIE 1. Otwórz komorę na baterie. (Fig A) 2. Włóż 3 baterie AA zgodnie z kierunkiem polaryzacji. (Fig B). Nie mieszaj starych i nowych baterii. 3. Umieść z powrotem zamknięcie
ZAWARTOŚĆ WYMIANA BATERII W DRONIE 1. Otwórz komorę na baterie. (Fig A) 2. Włóż 3 baterie AA zgodnie z kierunkiem polaryzacji. (Fig B). Nie mieszaj starych i nowych baterii. 3. Umieść z powrotem zamknięcie
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK
 Łukasz Bajda V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK Keywords: robot, guardian, PIR, H bridge Słowa kluczowe:
Łukasz Bajda V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy AUTONOMOUS GUARDIAN ROBOT AUTONOMICZNY ROBOT WARTOWNIK Keywords: robot, guardian, PIR, H bridge Słowa kluczowe:
Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych
 Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych P.P.H. WObit E.K.J OBER. s.c. 62-045 Pniewy, Dęborzyce 16 tel.(061) 22 27 410, fax.(061) 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl
Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych P.P.H. WObit E.K.J OBER. s.c. 62-045 Pniewy, Dęborzyce 16 tel.(061) 22 27 410, fax.(061) 22 27 439 e-mail: wobit@wobit.com.pl www.wobit.com.pl
Autonomiczny robot mobilny w kategorii linefollower MORPROF
 Autonomiczny robot mobilny w kategorii linefollower MORPROF Autorzy projektu: Marek Płóciennik 145396 Marcin Wytrych 145419 Koordynator Projektu: Dr inż. Grzegorz Granosik Spis Treści: 1. Opis projektu
Autonomiczny robot mobilny w kategorii linefollower MORPROF Autorzy projektu: Marek Płóciennik 145396 Marcin Wytrych 145419 Koordynator Projektu: Dr inż. Grzegorz Granosik Spis Treści: 1. Opis projektu
WIZUALIZACJA I STEROWANIE ROBOTEM
 Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Czujnik ultradźwiękowy serii DBK 4+
 Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
SIMSON. Raport. Robot moblilny klasy Line follower. Łukasz Kaźmierczak. Dawid Kwaśnik. Małgorzata Lewandowska. Wrocław, r.
 SIMSON Robot moblilny klasy Line follower Raport Łukasz Kaźmierczak Dawid Kwaśnik Małgorzata Lewandowska Wrocław, 06.03.2011 r. Spis treści 1. Wstęp...3 2. Założenia...3 3. Spis najważniejszych elementów...3
SIMSON Robot moblilny klasy Line follower Raport Łukasz Kaźmierczak Dawid Kwaśnik Małgorzata Lewandowska Wrocław, 06.03.2011 r. Spis treści 1. Wstęp...3 2. Założenia...3 3. Spis najważniejszych elementów...3
MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota
 MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota Scenariusze lekcji i zajęć pozalekcyjnych SCENARIUSZ DODATKOWY NR 5. Śmieciarka scenariusz zajęć pozalekcyjnych autor: Michał Kłosiński
MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota Scenariusze lekcji i zajęć pozalekcyjnych SCENARIUSZ DODATKOWY NR 5. Śmieciarka scenariusz zajęć pozalekcyjnych autor: Michał Kłosiński
Zestaw Startowy EvB. Więcej informacji na stronie: http://and-tech.pl/zestaw-evb-5-1/
 Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Zestaw Startowy EvB Zestaw startowy EvB 5.1 z mikrokontrolerem ATMega32 jest jednym z najbardziej rozbudowanych zestawów dostępnych na rynku. Został zaprojektowany nie tylko z myślą o początkujących adeptach
Sterownik przekaźników S4P-01
 EL-TEC Sp. z o.o. ul. Wierzbowa 46/48 93-133 Łódź tel: +48 42 663 89 05 fax: +48 42 663 89 04 e-mail: info@el-tec.com.pl http://www.el-tec.com.pl Sterownik przekaźników Dokumentacja Techniczno Ruchowa
EL-TEC Sp. z o.o. ul. Wierzbowa 46/48 93-133 Łódź tel: +48 42 663 89 05 fax: +48 42 663 89 04 e-mail: info@el-tec.com.pl http://www.el-tec.com.pl Sterownik przekaźników Dokumentacja Techniczno Ruchowa
Czujnik ultradźwiękowy serii DBK 4+
 Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
Produkty Czujniki i enkodery Czujniki ultradźwiękowe Czujnik ultradźwiękowy serii DBK 4+ Odległość nadajnik- odbiornik: 20-60mm Detekcja jednego i wielu arkuszy Możliwość patrzenia bokiem Możliwość ustawienia
Wyświetlacz funkcyjny C6
 Wyświetlacz funkcyjny C6 PODSUMOWANIE FUNKCJI Funkcje przedstawione są poniżej. PEŁNE POLE WIDZENIA NORMALNE POLE WIDZENIA Po włączeniu wyświetlacza, wyświetlają się wskaźniki taki jak prędkość jazdy,
Wyświetlacz funkcyjny C6 PODSUMOWANIE FUNKCJI Funkcje przedstawione są poniżej. PEŁNE POLE WIDZENIA NORMALNE POLE WIDZENIA Po włączeniu wyświetlacza, wyświetlają się wskaźniki taki jak prędkość jazdy,
Programowanie w Scratch robot mbot
 Programowanie w Scratch robot mbot SPOTKANIE 1 - CZYM JEST ALGORYTM CO DAJE PROGRAMOWANIE ROBOT MBOT PODSTAWOWE POLECENIA ROBOTA ZADANIA Czym jest algorytm Co daje programowanie PROGRAMOWANIE UCZY LOGICZNEGO
Programowanie w Scratch robot mbot SPOTKANIE 1 - CZYM JEST ALGORYTM CO DAJE PROGRAMOWANIE ROBOT MBOT PODSTAWOWE POLECENIA ROBOTA ZADANIA Czym jest algorytm Co daje programowanie PROGRAMOWANIE UCZY LOGICZNEGO
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Proste układy wykonawcze
 Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
Proste układy wykonawcze sterowanie przekaźnikami, tyrystorami i małymi silnikami elektrycznymi Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne
DWUKIERUNKOWY REGULATOR SILNIKA DC VDC 20A
 DWUKIERUNKOWY REGULATOR SILNIKA DC 12-24 VDC 20A Regulator przeznaczony do silników prądu stałego DC o napięciu 12-24V i prądzie max 20A. Umożliwia płynną regulację prędkości obrotowej, zmianę kierunku
DWUKIERUNKOWY REGULATOR SILNIKA DC 12-24 VDC 20A Regulator przeznaczony do silników prądu stałego DC o napięciu 12-24V i prądzie max 20A. Umożliwia płynną regulację prędkości obrotowej, zmianę kierunku
ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM
 ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM Adam MUC, Lech MURAWSKI, Grzegorz GESELLA, Adam SZELEZIŃSKI, Arkadiusz SZARMACH CEL Wykorzystanie popularnych
ZASTOSOWANIE PLATFORM CYFROWYCH ARDUINO I RASPBERRY PI W NAUCZANIU STEROWANIA OBIEKTEM PNEUMATYCZNYM Adam MUC, Lech MURAWSKI, Grzegorz GESELLA, Adam SZELEZIŃSKI, Arkadiusz SZARMACH CEL Wykorzystanie popularnych
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych. Instrukcja do ćwiczenia laboratoryjnego
 Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Interfejsy komunikacyjne pomiary sygnałów losowych i pseudolosowych Instrukcja do ćwiczenia laboratoryjnego opracował: Łukasz Buczek 05.2015 rev. 05.2018 1 1. Cel ćwiczenia Doskonalenie umiejętności obsługi
Robot klasy minisumo
 BANSHEE Robot klasy minisumo Autor: Michał Drwięga drwiega.michal@gmail.com 2 lutego 2012 Spis treści 1 Wstęp i założenia konstrukcyjne 2 1.1 Założenia dotyczące konstrukcji mechanicznej......................
BANSHEE Robot klasy minisumo Autor: Michał Drwięga drwiega.michal@gmail.com 2 lutego 2012 Spis treści 1 Wstęp i założenia konstrukcyjne 2 1.1 Założenia dotyczące konstrukcji mechanicznej......................
Altus 50 RTS / 60 RTS
 Altus 50 RTS / 60 RTS Instrukcja obsługi napędów z odbiornikiem radiowym serii Altus 50 RTS / 60 RTS. Informacje ogólne Napędy serii Altus RTS mogą współpracować z wszystkimi nadajnikami serii RTS np.:
Altus 50 RTS / 60 RTS Instrukcja obsługi napędów z odbiornikiem radiowym serii Altus 50 RTS / 60 RTS. Informacje ogólne Napędy serii Altus RTS mogą współpracować z wszystkimi nadajnikami serii RTS np.:
LEGO Segway. Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway
 LEGO Segway Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Kraków, 29.05.2009 Projekt LEGO Segway
LEGO Segway Budowa i analiza strukturalnie niestabilnego robota mobilnego na bazie projektu Segway Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Kraków, 29.05.2009 Projekt LEGO Segway
ROBOT MOBILNY TYPU LINE FOLLOWER JACK. Michał Rybczyński
 ROBOT MOBILNY TYPU LINE FOLLOWER JACK Michał Rybczyński Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2011 Spis treści 1. Wstęp... 3 2. Konstrukcja mechaniczna... 4 3. Zasilanie... 5 4. Napęd...
ROBOT MOBILNY TYPU LINE FOLLOWER JACK Michał Rybczyński Koło Naukowe Robotyków KoNaR www.konar.pwr.wroc.pl Wrocław 2011 Spis treści 1. Wstęp... 3 2. Konstrukcja mechaniczna... 4 3. Zasilanie... 5 4. Napęd...
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Uniwersalny Komputer Pokładowy (UKP-3 oraz UKP-PRO)
") Uniwersalny Komputer Pokładowy (UKP-3 oraz UKP-PRO) Skrócona instrukcja montażu (dla elektryków samochodowych / monterów) Data ostatniej aktualizacji: 205-09- www.reveltronics.com Przed pierwszym montażem
Uniwersalny Komputer Pokładowy (UKP-3 oraz UKP-PRO) Skrócona instrukcja montażu (dla elektryków samochodowych / monterów) Data ostatniej aktualizacji: 205-09- www.reveltronics.com Przed pierwszym montażem
SDD287 - wysokoprądowy, podwójny driver silnika DC
 SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
SDD287 - wysokoprądowy, podwójny driver silnika DC Własności Driver dwóch silników DC Zasilanie: 6 30V DC Prąd ciągły (dla jednego silnika): do 7A (bez radiatora) Prąd ciągły (dla jednego silnika): do
Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut
 Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut Charakterystyka maszyny - Scharmann Heavycut Rodzaj maszyny wytaczarka Układ sterowania Stary Sinumerik 8 + Sinumerik 840D (MMC
Zastosowanie Safety Integrated na przykładzie obrabiarki Scharmann Heavycut Charakterystyka maszyny - Scharmann Heavycut Rodzaj maszyny wytaczarka Układ sterowania Stary Sinumerik 8 + Sinumerik 840D (MMC
Nadzór Linii Produkcyjnych. Jacek Pszczółka AiR 187735
 Nadzór Linii Produkcyjnych Jacek Pszczółka AiR 187735 Linia Produkcyjna Linia produkcyjna albo linia montażowa zespół stanowisk roboczych (maszynowych, ręcznych lub mieszanych) ugrupowanych według kolejności
Nadzór Linii Produkcyjnych Jacek Pszczółka AiR 187735 Linia Produkcyjna Linia produkcyjna albo linia montażowa zespół stanowisk roboczych (maszynowych, ręcznych lub mieszanych) ugrupowanych według kolejności
Robot Mobilny Mobot-Explorer
 Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Robot Mobilny Mobot-Explorer Możliwości sterowania i rozbudowy Automatyka Robot Mobilny i mechatronika Mobot-Explorer Mobilny Robot Explorer-A1 jest zbudowany w oparciu o stalową konstrukcję nośną i cztery
Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z
 serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
serwomechanizmy Serwomechanizm - zamknięty układ sterowania przemieszczeniem, o strukturze typowego układu regulacji. Wartość wzorcowa porównywana jest z przetworzonym przez przetwornik bieżącym sygnałem
Falownik MOTOVARIO LM16. Skrócona instrukcja obsługi
 Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
Falownik MOTOVARIO LM16 Skrócona instrukcja obsługi Przewodnik ten ma pomóc w zainstalowaniu i uruchomieniu falownika oraz sprawdzeniu poprawnego działania jego podstawowych funkcji. W celu uzyskania szczegółowych
NAZWA PRODUKTU: ZDALNIE STEROWANY HELIKOPTER LS220 RC ŻYROSKOP Z57
 NAZWA PRODUKTU: ZDALNIE STEROWANY HELIKOPTER LS220 RC ŻYROSKOP Z57 Cechy produktu Żyroskopowa stabilizacja lotu (NOWOŚĆ 2018) Aluminiowo-plastikowa konstrukcja Ładowanie helikoptera bezpośrednio z pilota
NAZWA PRODUKTU: ZDALNIE STEROWANY HELIKOPTER LS220 RC ŻYROSKOP Z57 Cechy produktu Żyroskopowa stabilizacja lotu (NOWOŚĆ 2018) Aluminiowo-plastikowa konstrukcja Ładowanie helikoptera bezpośrednio z pilota
Napęd CANON MD5501. Fot 1. Wygląd płytki sterującej napędu CANON MD5501
 Napęd CANON MD5501 Fot 1. Wygląd płytki sterującej napędu CANON MD5501 Wyprowadzenia układu MB88001A Pin# Przeznaczenie 1 Pin 16 Edge (MOTOR ON) 2 NC 3 Density Select podciąg R45 (10k). Zworka JJ24 zwiera
Napęd CANON MD5501 Fot 1. Wygląd płytki sterującej napędu CANON MD5501 Wyprowadzenia układu MB88001A Pin# Przeznaczenie 1 Pin 16 Edge (MOTOR ON) 2 NC 3 Density Select podciąg R45 (10k). Zworka JJ24 zwiera
AUTOMATYKA DO BRAM Cennik WAŻNY OD
 AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
PROJEKT ROBOTA MOBILNEGO TYPU LINE FOLLOWER
 Maciej Wochal, Łukasz Wójcik, Tomasz Zając, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn,
Maciej Wochal, Łukasz Wójcik, Tomasz Zając, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn,
MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota
 MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota Scenariusze lekcji i zajęć pozalekcyjnych SCENARIUSZ 7. AUTONOMICZNY POJAZD scenariusz zajęć pozalekcyjnych autor: Kamil Kociszewski redakcja:
MoboLab roboty i tablety w Twojej szkole Obszar I. Zakoduj robota Scenariusze lekcji i zajęć pozalekcyjnych SCENARIUSZ 7. AUTONOMICZNY POJAZD scenariusz zajęć pozalekcyjnych autor: Kamil Kociszewski redakcja:
Instrukcja i-r Light Sensor
 Instrukcja i-r Light Sensor Spis treści Informacje ogólne str. 3 Opis urządzenia str. 4 Funkcje str. 5 Procedury programowania str. 7 Wymiana baterii str. 9 Dane techniczne str. 10 2 Informacje ogólne
Instrukcja i-r Light Sensor Spis treści Informacje ogólne str. 3 Opis urządzenia str. 4 Funkcje str. 5 Procedury programowania str. 7 Wymiana baterii str. 9 Dane techniczne str. 10 2 Informacje ogólne
Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych
 Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych P.P.H. WObit E. K. J. Ober. s.c. 62-045 Pniewy, Dęborzyce 16 tel. 61 222 74 10, fax. 61 222 74 39 wobit@wobit.com.pl www.wobit.com.pl
Instrukcja obsługi GEN2 Regulowany generator przebiegów prostokątnych P.P.H. WObit E. K. J. Ober. s.c. 62-045 Pniewy, Dęborzyce 16 tel. 61 222 74 10, fax. 61 222 74 39 wobit@wobit.com.pl www.wobit.com.pl
Kontroler Xelee Master DMX64/512 - Instrukcja obsługi. Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi. www.nelectrica.
 Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi www.nelectrica.com strona 1 Spis Treści 1. Informacje ogólne 2. Instalacja 2.1 Panel przedni... 5 2.2 Panel tylny... 6 2.3 Schemat podłączenia...
Kontroler Xelee Master DMX64/512 Firmware 1.1 Instrukcja Obsługi www.nelectrica.com strona 1 Spis Treści 1. Informacje ogólne 2. Instalacja 2.1 Panel przedni... 5 2.2 Panel tylny... 6 2.3 Schemat podłączenia...
Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]
![Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]](/thumbs/25/5870352.jpg "Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE. [Prędkości maksymalne]") Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE [Prędkości maksymalne] - Podniesienie Silnika - Przejazd silnika do krańcówki OSI-Y MIN - Cofnięcie Pasa jeśli czujnik optyczny
Start maszyny Włączenie zasilania lub zwolnienie guzika Bezpieczeństwa ZEROWANIE [Prędkości maksymalne] - Podniesienie Silnika - Przejazd silnika do krańcówki OSI-Y MIN - Cofnięcie Pasa jeśli czujnik optyczny
AP3.8.4 Adapter portu LPT
 AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
AP3.8.4 Adapter portu LPT Instrukcja obsługi PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja AP3.8.4 1 23 październik
I. DANE TECHNICZNE II. INSTRUKCJA UśYTKOWANIA... 4
 Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
POKL.04.01.02-00-020/10. Program Operacyjny Kapitał Ludzki współfinansowany przez Unię Europejską ze środków Europejskiego Funduszu Społecznego
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny