WYKŁAD DLA KIERUNKU MECHANIKA I BUDOWA MASZYN
|
|
|
- Dariusz Zając
- 9 lat temu
- Przeglądów:
Transkrypt


1 WYKŁAD DLA KIERUNKU MECHANIKA I BUDOWA MASZYN

2 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci

3 U K Ł A D Y M E C H A N I C Z N E: Grupa I Elementy sładowe nie przemieszczaą się względem siebie onstruca nośna dachu hali, wieża stalowa, most, orpus maszyny Grupa II Elementy sładowe przemieszczaą się względem siebie uład orbowy silnia spalinowego zawieszenie oła samochodu, samolotu schody ruchome wysięgni opari, ładowari robot 3

4 UKŁADY KINEMATYCZNE: MECHANIZMY MASZYN I URZĄDZEŃ, POJAZDÓW, ROBOTÓW (MANIPULATORY), 4

5 Kurs ma nauczyć: budowy i działania uładów inematycznych metod analizy opisu własności inematycznych i dynamicznych budowy i własności wybranych mechanizmów Wiedza PRZYDATNA do: proetowania, onstruowania i esploatowania 5

6 Poszczególne działy TMiM: strutura uładów inematycznych (el. sładowe, połączenia, własności ruchowe), inematya (wyznaczanie parametrów ruchu) dynamia równowaga statyczna i inetostatyczna (siły masowe,siły w połączeniach, siły napędzaące, tarcie, sprawność), badanie ruchu uładów masowych 6
, badanie")
7 7
8 8
9 9
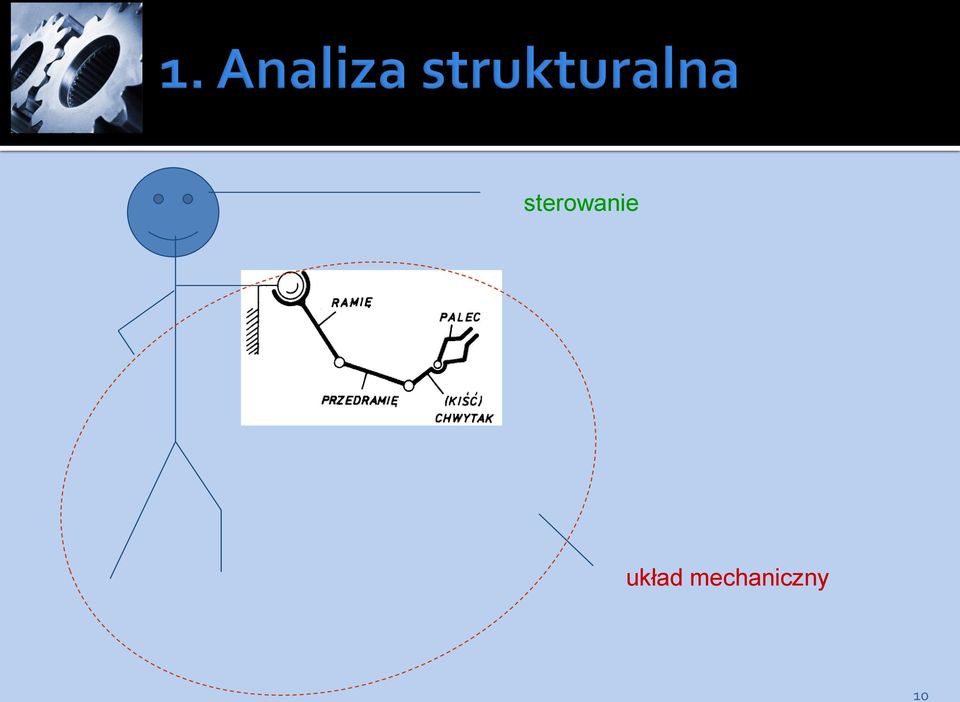
10 sterowanie uład mechaniczny
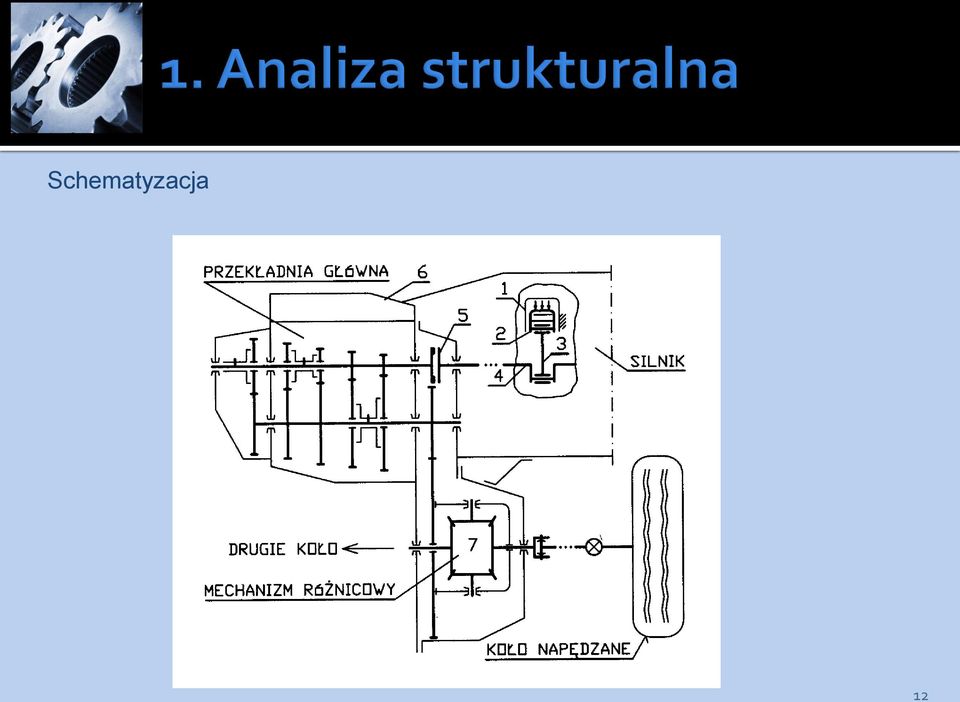
11 Schematyzaca PRZEKŁ. GŁÓWNA SILNIK PRZEKŁ. RÓŻNICOWA

12 Schematyzaca
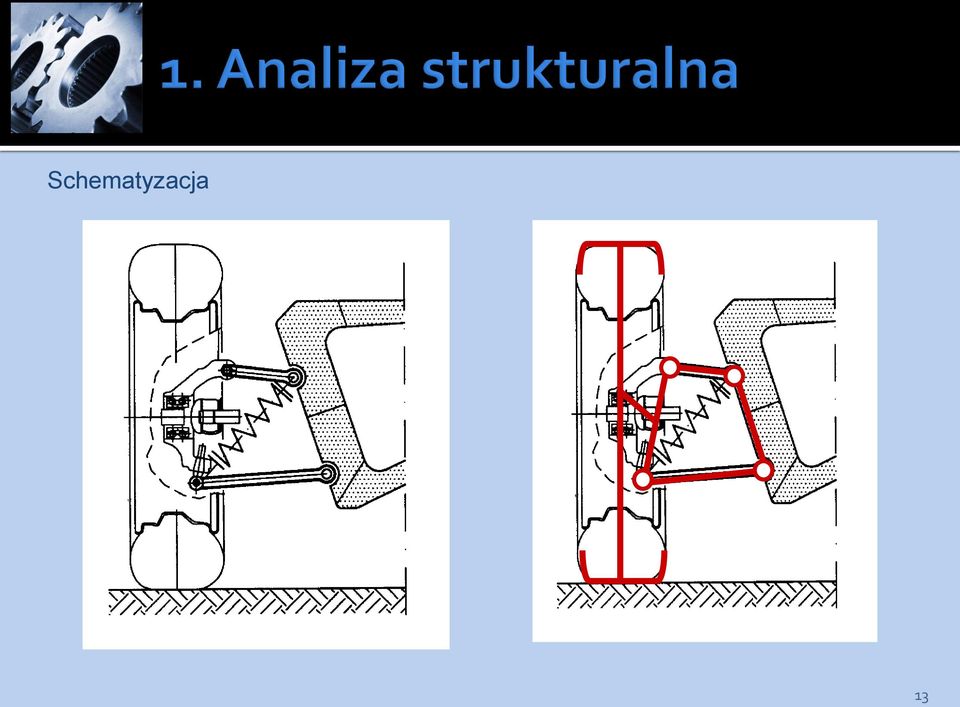
13 Schematyzaca 3
14 Schematyzaca 4

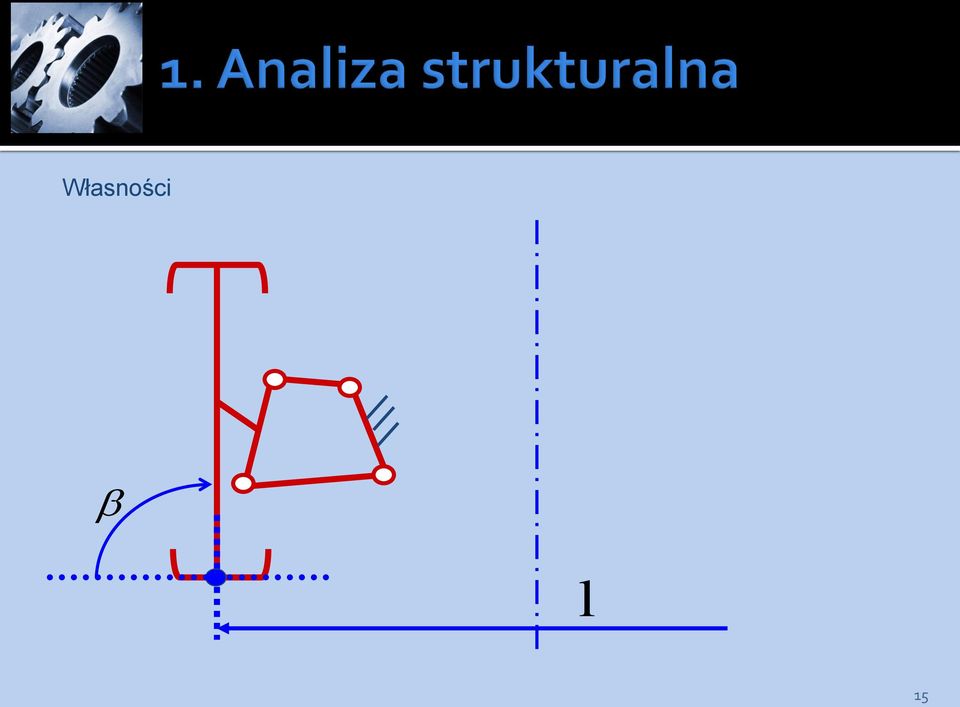
15 Własności l 5
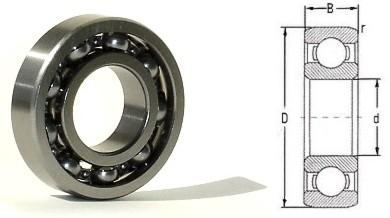
16 CZŁONY elementy sładowe uładu inematycznego 6

17 CZŁONY elementy sładowe uładu inematycznego PRZEMIESZCZAJĄ SIĘ WZGLĘDEM SIEBIE 7

18 8
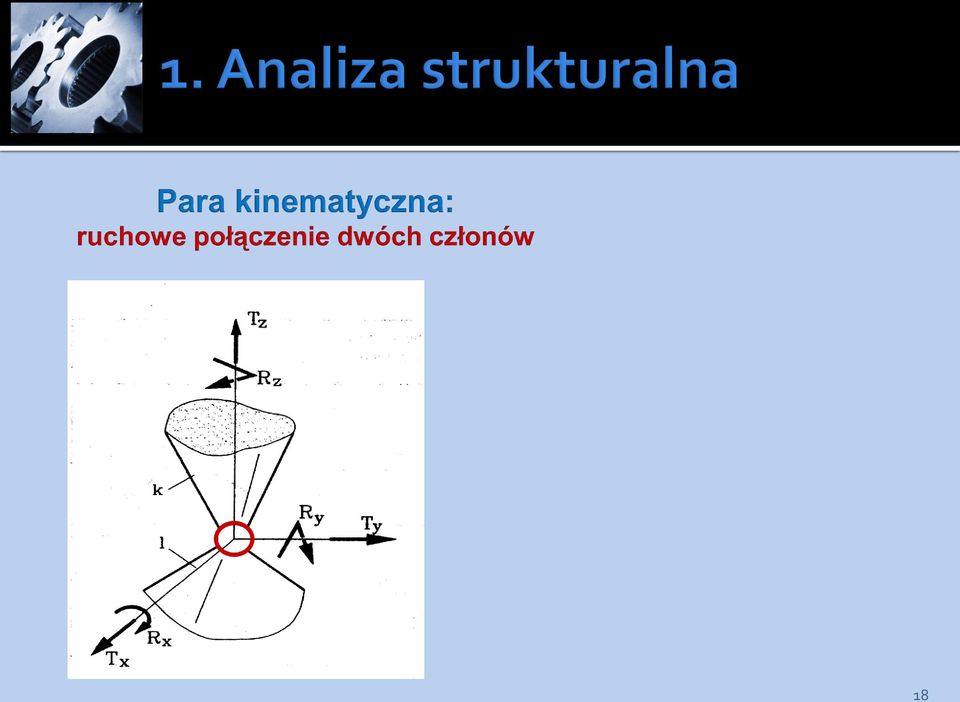
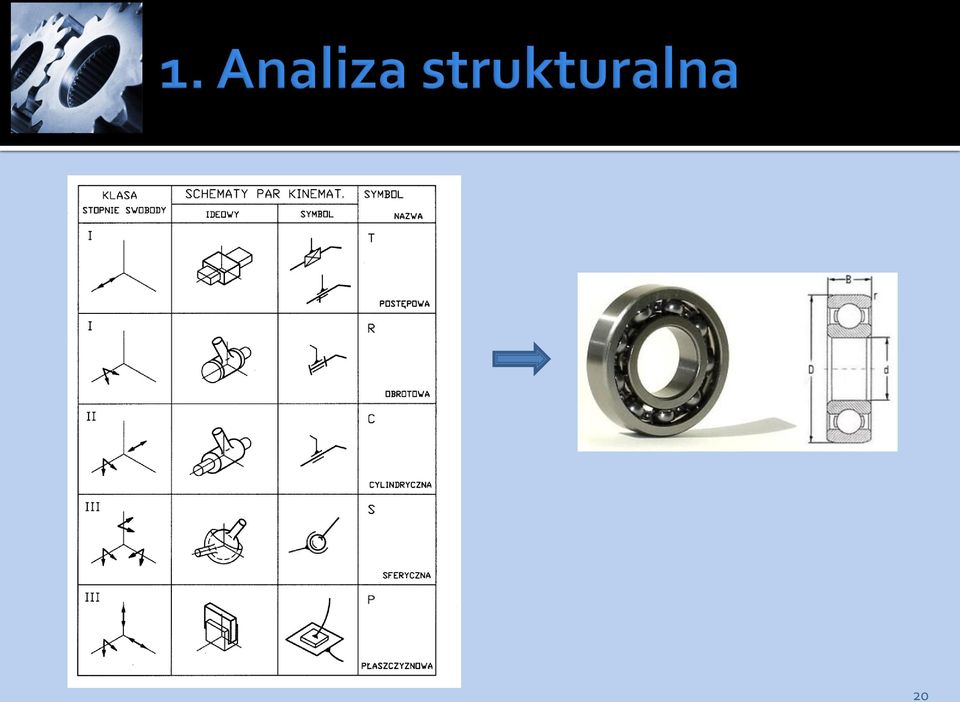
19 Klasy par f=5 para V lasy f=4 para IV lasy f=3 III f= II f= I f=??? f=6??? 9

20
21 Pary inematyczne uładów płasich
22 Pary inematyczne uładów płasich
23 Pary inematyczne uładów płasich 3
24 PARY: WYŻSZE - sty puntowy lub liniowy NIŻSZE: sty powierzchniowy RODZAJ STYKU DECYDUJE O MOŻLIWOŚCI PRZENOSZENIA DUŻYCH/MAŁYCH SIŁ W KONTAKCIE DWÓCH CZŁONÓW Mechanizmy w tórych człony są połączone wyłącznie parami niższymi nazywane są mechanizmami dźwigniowymi Przyłady mechanizmów dźwigniowych? (duże siły) 4

25 W= 5
26 W= 6
27 7
28 n = + 8
29 Ruchliwość uładów płasich (D): Oznaczenia: liczba członów ruchomych n = + wszystie człony p liczba par I lasy, p liczba par II lasy n = + 9
30 Ruchliwość uładów płasich (D): człon ma 3 stopnie swobody członów ma 3 = 3(n-) stopni swobody utworzenie pary inematyczne i-te lasy odbiera (3-i) stopni swobody n = + 3
31 Ułady płasie (D) W T 3 n p p Ułady przestrzenne (3D) W T n p p p p p WT RUCHLIWOŚĆ TEORETYCZNA!!! 3
32 3
33 W =? p p W T 33
34 W =? W R, p, p W T 34
35 PORÓWNANIE W T W T 35
36 RUCHLIWOŚĆ LOKALNA W T W R W R W T W L 36
37 CZY JEST RUCH? 37
38 Szczególna geometria: człon BC prostoliniowy W W R R W T W L Uład można zmontować w 4 onfiguracach Jaich? 38
39 W R W T W L 39
40 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 4
41 W R n 5; p 6; p WT? 4
42 W R W T W L W B W B Więzy bierne dodatowe, zbędne inematycznie ograniczenia ruchu 4
43 UKŁAD NIERACJONALNY 43
44 W R W T W W T 4 W L W B R 4 5 UKŁAD NIERACJONALNY Z WIĘZAMI BIERNYMI 44
45 45
46 W T 3 W W R W T W L R W B 3 4 W B 4 46
47 h 47
48 h h 48
49 Waruni ruchu (geometria!) UKŁAD Z WIĘZAMI BIERNYMI - NIERACJONALNY 49
50 Modyfiaca strutury ta, aby: W B =, bra więzów biernych, W L =, bra ruchliwości loalnych pi wirni powinien tworzyć z podstawą dwie pary inematyczne 5
51 W T = 6-5p -4p -3p 3 -p 4 -p 5 = =
52 Rozwiązanie: =, p 3 =, p 4 = UKŁAD BEZ WIĘZÓW BIERNYCH - RACJONALNY 5
53 Przeładnia cierna tarcie, bra poślizgu 53

54 tarcie, Przeładnia cierna bra poślizgu W W R R W T W L W T W B
55 Warune ruchu: L = R+r tarcie, bra poślizgu R r L Co gdy L > r+r? Co gdy L < r+r? 55
56 Raconalne rozwiązanie? W T = W B 56
57 4 x R (I lasa) 57
58 WNIOSKI: Ruch uładu z więzami biernymi est możliwy tylo dla szczególnych warunów geometrycznych Odchyłi wymiarów liniowych i ątowych zawsze sutuą łopotami montażowymi, dodatowymi siłami, obniżeniem trwałości uładu inematycznego SĄ WIĘC NIERACJONALNE STRUKTURALNIE W pratyce należy proetować ułady raconalne Odstępstwo od te zasady może być tylo świadome!!! 58
59 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 59
60 położenia (onfiguraca) uładu prędość przyspieszenie 6
61 przemieszczeniu liniowemu s K (t) puntu K odpowiadaą prędość i przyspieszenie liniowe v K s K ds dt K a K s K dv dt K d s dt K przemieszczeniu ątowemu (t), członu odpowiadaą prędość i przyspieszenie ątowe d dt d dt d dt 6
62 METODY ANALIZY KINEMATYCZNEJ graficzne analityczne numeryczne Po co inematya? wstępny etap proetowania nie ma dynamii bez inematyi!!! 6
63 PODZIAŁKI RYSUKOWE C B A D Podziała długości: l BC ( BC) m mm 63
64 Podziała siły: F F ( F) N mm 64
65 PODZIAŁKI OGÓLNIE i i (i) wielość rzeczywista wielość rysunowa Podziała prędości v v (v) - ms mm Podziała przyspieszenia a a (a) - ms mm 65
66 RYSOWANIE POŁOŻEŃ M B C A D 66
67 M B C A C* D 67
68 Położenie - onfiguraca uładu Człon AB obraca się do AB Co z pozostałymi członami? E B C F B A D 68
69 traetorie nietórych puntów są oczywiste E B C F B A D 69
70 Człony nie zmieniaą wymiarów (sztywne) E E B C F F B C A D 7
71 Położenie - onfiguraca uładu Przemieszcza się suwa: F F Co z pozostałymi członami? E R=EF B C F F A D 7
72 tor E - E E B C F F A D 7
73 tor E - E E R=EF B C F F A D 73
74 tor E - E E E R=EF B C F F A D 74
75 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 75
76 METODY WEKTOROWE, GRAFICZNE 76
77 Dwa człony ruch płasi 77
78 v styczne do toru A v A A v B B B {} 78
79 ruch płasi ruch obrotowy 79
80 v AS A v BS B v (AS A ) (v (BS B ) ) tg 8
81 człony ruchome A B S AB b a {} v A = v B v BA =v AB = liczba śr. obrotu: n n n i KAŻDY Z KAŻDYM! 8
82 S S S 3 i S S S 3 3 8
83 S S S S 3 3 pary in.??? S S 3 83
84 V C V B S 84
85 ,, S i S S 3,, S 3 i S 3 S 85
86 twierdzenie o trzech śr obrotu: trzy człony,, l trzy środi obrotu S S l S l leżące na edne proste 86
87 S i S 3 S i S 3 S 3 87
88 3 M 88
89 3 3 M 3 89
90 S i S 3 3 S i S 3 S 3 3 M 3 3 S... i S... S... i S... S 9
91 3 3 M 3 3 V M 9
92 Równania wetorowe plan prędości plan przyspieszeń 9
93 (D) punty M i N eden człon t 93
94 94 NM M N v v v MN NM r ω v t NM n NM M NM M N a a a a a a MN MN n NM r r ω ω a MN t NM r ε a
95 K B const C 3 A TR D v B ω AB vb ω AB 95
96 K B const C 3 A v CB v C D v C p v v C c v CB v C v B v CB v B b v CB 96
97 v KB K vkc B const C 3 A D p v v C c v v K K v v v B B C v v v KB KB KC v C v KC v K v B v KB v KC b v CB v KB 97
98 v KB B K v KC ΔBCK ~ Δbc BC bc BK b KC c const. const C 3 v CB A v BC D p v v K v B v C c v CB PODOBIEŃSTWO v KB b v KB członu BCK i planu bc v KC 98
99 K B const A C 3 D a B a n B a t B 99
100 A B C K D 3 const AB v AB ω a ) ( B n B n B AB ω ω a AB AB ε a t B t B AB ε a
101 K B const C 3 A D a C t a CB t a CB c n a CB a CB b a C n a CB a B p a a a a C C n CB a a B n B vcb CB a a CB n CB a t CB
102 K const A B C D 3 c ac p a PODOBIEŃSTWO członu i planu a ΔBCK ~ Δbc b a B
103 (D) punty J i K - dwa człony, v K v J v KJ v KJ ω ρ 3
104 4 C KJ t KJ n KJ J KJ J K a a a a a a a ρ ρ ω ω a n KJ ρ ε a t KJ KJ C KJ v ω a
105 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 5
106 OPIS KINEMATYKI (RÓWNANIA NA POŁOŻENIA, PRĘDKOŚCI I PRZYSPIESZENIA) OTRZYMUJE SIĘ M.IN. W OPARCIU O W I E L O B O K W E K T O R Ó W, KTÓRY ZASTĘPUJE UKŁAD KINEMATYCZNY 6
107 Rzuty wetorów a a sin a cos 7
108 a a sin a cos 8
109 y o B C A x o D 9
110 y o, b B C, a 3, c A x o, d D 3 a b d c
111 y o, b B C, a 3, c A x o, d D 3 Rzuty na osie x i y a cos bcos d asin bsin ccos csin 3 3
112 Rzuty na osie x i y a cos bcos d asin bsin ccos csin 3 3 Dane: a, b, c, d oraz Oreślić: i 3
113 3 3 3 sin sin sin cos cos cos c a b c d a b 3 3 sin sin sin cos cos cos c a b c d a b
114 4 3 3 sin sin cos cos sin cos c a c d a b cos cos sin sin cos cos ac cd ad d c a b
115 5 ac d c b a c d a d cos cos cos sin sin cos cos cos Podstawienie
116 6 Podstawienie: tan tan cos tan tan sin
117 3 3 Atan B tan C gdzie: A B cos sin cos C 3 cos 3 3 tan B B 4AC A rozwiązania 7
118 Podobna droga do a cos bcos asin bsin d ccos csin 3 3 a cos bcos d a sin b c sin i ta dale wyznaczamy 8
119 3 9
120 3 3
121 y o, b B C, a 3, c A x o, d D 3 a b d c równania rzutów
122 Równania rzutów = równania położeń: acos asin bcos bsin d csin ccos 3 3 Zmienne: ( t), ( t), 3( t) zmienna niezależna (napęd), np. ( t )
123 3 cos cos cos sin sin sin c b a c b a Równania prędości -sza pochodna po czasie,,3 i dt d i i i
124 4 Uporządowanie cos cos sin sin cos sin c b c b a a cos sin cos cos sin sin a a c b c b Gdy dane znane wartości (liczby) dla oreślonego położenia odwracanie macierzy
125 5 Równanie prędości sin cos sin cos sin cos cos sin cos sin cos sin c c b b a a c c b b a a Równania przyspieszeń -ga pochodna po czasie,,3 i dt d dt d i i i i cos cos cos sin sin sin c b a c b a
126 6 sin sin cos cos cos cos sin sin sin cos cos sin c b c b c b c b a a a a Uporządowanie
127 sin cos cos sin sin sin cos cos cos cos sin sin a a a a c b c b c b c b Gdy dane i
128 8,...,,,...,,,...,...,...,,,...,,,...,,...,,,...,,,..., m n m m m n m n x x q q w w f f x x q q w w f f x x q q w w f f,, x w q f w wetor wymiarów członów (liniowych i ątowych), q wetor znanych współrzędnych wetorowych (zmienne niezależne, napędy), x wetor nieznanych współrzędnych wetorowych (zmienne zależne) R. wetorowe R. rzutów na x, y
129 9 ], [ x t q t f q q f x x f f dt d A x f m m m m m x f x f x f x f x f x f T x m x... x zmienne zależne
130 3 B q f n m m m n q f q f q f q f q f q f Bq x A T q n q... q zmienne niezależne, napędy Bq A x R. PRĘDKOŚCI
131 x x... q q... x T m q T n Ax Bq Ax Ax Bq Bq x A Ax Bq Bq R. PRZYSPIESZEŃ 3
132 M q, q x M y M 3
133 M a b c q acos q bcos x c q cos x asin q bsin x q sin x 33
134 34 M sin sin sin cos cos cos x q x b q a x q c x b q a f f f q, q - zmienne niezależne (znane wymuszenia), x, x zmienne zależne (niewiadome),
135 35 cos cos sin sin x q x b x q x b x f A sin sin sin cos cos cos x q x b q a x q c x b q a f f f A x f m m m m m x f x f x f x f x f x f
136 36 sin sin sin cos cos cos x q x b q a x q c x b q a f f f B q f n m m m n q f q f q f q f q f q f sin cos cos sin x q a x q a q f B
137 37 T x x x T q q q Bq A x sin cos cos sin cos cos sin sin q q x q a x q a x q x b x q x b x x Równanie prędości
138 38 cos cos sin sin x q x b x q x b x f A sin cos sin cos sin cos x q x x q x x b x q x x q x x b dt d A A
139 39 sin cos cos sin x q a x q a q f B cos sin sin cos x x q q a x x q q a dt d B B

140 Równanie przyspieszeń x A Ax Bq Bq x q x x T, q, q T 4
141 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 4
142 M A N I P U L A T O R Y MECHANIZMY ROBOTÓW 4
143 ROBOT JAKI JEST, KAŻDY WIDZI sterowanie uład mechaniczny 43
144 CZUJNIKI JEDN. STERUJ. NAPĘDY MANIP. EFEKTOR OTOCZ. CZUJNIKI ułady mechaniczne 44
145 ZASTOSOWANIA: PRACA W SRODOWISKU NIEBEZPIECZNYM: PROMIENIOWANIE, SKAŻENIE ZAGROŻENIE EKSPLOZJĄ (POLICJA, WOJSKO) WYSOKIE CIŚNIENIE, GŁĘBIA UCIĄŻLIWE I POWTARZALNE OPERACJE TECHNOLOGICZNE MONTAZOWE, SPAWALNICZE, OBRÓBCZE,... MEDYCYNA, OCHRONA ZDROWIA REHABILITACJA ZABIEGI OPERACYJNE OPIEKA NAD NIEPEŁNOSPRAWNYMI i inne 45
146 MANIPULATOR KOPIUJĄCY -małe siły (napędza operator), - małe odległości (długi łańcuch inemat błędy) servo compute r 46
147 operator sterue za pomocą przycisów (bra czucia ) servo compute r 47
148 Serwonapędy operator czue siłę servo compute r 48
149 servo Robot współczesny compute r 49
150 5
151 5
152 Strutura RUCHY LOKALNE RUCHY REGIONALNE EFEKTOR Robot przemysłowy LOKOMOCJA KORPUS 5
153 Rozwiązania możliwe (ułady 3D, uniwersalne),, orientaca efetora (3 st. swobody) x,y,z pozyca efetora (3 st. swobody) Wymagana ruchliwość: W = (+ na chwyt) 53
154 schemat ogólny, tylo pary l: R i/lub T C B A T T T R T R R R A B T T R R R T T R C T R R R T T R T 3T TR TR 3R TRT RT RTR RT 54
155 3T 55
156 3T TR 56
157 3T TR 3R 57
158 Manipulatory o struturze: szeregowe równoległe 58
159 TTT 59
160 RTT 6
161 RRT 6
162 SCARA RRR 6

163 W=3 W= W= 63

164 STREFA ROBOCZA 64
165 Kąt i współczynni serwisu ąt serwisu: współczynni serwisu: p 4 s S 65
166 = 66
167 = = 67
168 Manewrowość (redundanca) Ruchliwość po unieruchomieniu efetora (chwytaa) 68
169 Ułady płasie W = 3 RRR RRT 69
170 RTR TRR 7
171 W = 3 pary R i/lub T 7
172 7
173 73
174 74

175 mechanizm i manipulator równoległy: człony, pary inematyczne, strutura oparta na łańcuchach zamniętych; ednaowe zawisa fizyczne, podobne metody analizy 75
176 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 76
177 dane,, : 3 xq, yq pozyca orientaca 77
178 sin sin sin cos cos cos a a a y a a a x Q Q
179 xq, yq pozyca dane:,, 3 orientaca 79
180 Dane: x Q, y Q x y Q Q a a cos a sin a cos sin a34cos 3 a sin

181 8
182 8
183 M rm rm p 83
184 ey ex M rm rm p 84
185 85 M M p r R r x sin cos e y cos sin e wersory y x cos sin sin cos e e R Macierz rotaci
186 86 M M M M y x y x y x cos sin sin cos T cos sin sin cos R R R I cos sin sin cos cos sin sin cos R R
187 r M R r M p r M A r M Przeształcenie ednorodne 87
188 88 p R A cos sin sin cos y x A T T T y x p q wetor wsp. absolutnych
189 89 x y a a 3 a 3 4 Q Q Q Q Q y x A A A y x a y x Q Q
190 y Q 3 a 34 3 a a 3 x A cos sin sin cos 9
191 y Q 3 a 34 3 a a 3 x A cos sin sin cos a 9
192 y Q 3 a 34 3 a a 3 x A 3 cos sin 3 3 sin cos 3 3 a 3 9
193 93 cos sin sin cos cos sin sin cos cos sin sin cos Q Q Q Q y x a a y x
194 Q (x Q, y Q ) 3 3 x y Q Q
195 95 x y a a 3 a 3 4 Q Q Q Q Q y x A A A y x a y x Q Q
196 x y Q Q A 3 a 34 A 3 cos sin 3 sin 3 a cos a3 cos cos a sin a sin
197 Prędość puntu Q x y Q Q A 3 a 34 97
198 x Q a 34 a sin 3 3 sin a sin 3 y Q a 34 cos 3 3 cos a cos a
199 x Q y Q a a a sin sin sin 3 asin a3sin 3 a3sin 3 99
200 3 J Q Q y x J aobian manipulatora JΘ V V J Θ zadanie proste zadanie odwrotne
201 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci
202
203 {} M {} r M R r M p 3
204 4 M M p r R r M M M M M M z y x z y x z y x R z y x e e e R
205 5 x x z x y x x, cos, cos, cos e T z T y T x T e e e R R R osinusy ierunowe transponowanie tożsame z odwracaniem
206 6 z y T z T y T x x e e e e e e I R R
207 R R I e e e T x T y T z e x e y e z T e e x x T e e x y... T e e y x T e e y y
208 a T b b T a T e e x x T e e x y T e e x z T e e y x T e e y y T e e y z T e e z x T e e z y T e e z z 8
209 T e e T e e x x x y T e e x z T e e y y T e e y z T e e z z 9 elementów macierzy rotaci est powiązanych 6-ma równaniami tylo 3 są niezależne 9
210 M M p r R r M M r A r M M M M M M z y x z y x z y x R
211 z y x p e e e p R A Macierz transformaci odwrotne z y x R A A
212 {} p p {} p R p R T p
213 3 T z T y T x T z T y T x T p e p e p e p e e e p R T p R p R p T z T y T x p e p e p e R A A
214 Postać ogólna A R p e x e y e z p 4
215 5 {} p {} : z y x transl p A
216 6 {} z x y Z cos sin sin cos, : z z z z z z rot A
217 7 {} z x y y cos sin sin cos, : y y y y y y rot A
218 UZUPEŁNIJ z x {} y A rot : x, x
219 9 cos sin sin cos, : x x x x x x rot A
220
221
222 transl : p x y z
223 3 cos sin sin cos, : p p p p p y y rot
224 4 cos sin sin cos, : p p p p p x x rot
225 5 cos sin sin cos cos sin sin cos p p p p p p p p z y x A z y x A
226 WYNIK MNOŻENIA A x y z Weryfiaca! 6
227 AB BA sładanie transformaci nie est przemienne, a więc uzysanie poprawne transformaci złożone wymaga zachowania odpowiednie oleności transformaci elementarnych oraz doonywania ich w olenych pośrednich uładach współrzędnych 7
228 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 8
229 po raz pierwszy opubliowana w pracy: Denavit J., Hartenberg R.S.: A Kinematic Notation for Lower Pairs Mechanisms Based on Matrices. Transactions of ASME, Journal of Applied Mechanics, Vol., 955 9
230 W uładach inematycznych pary R, T, C, S i inne 3
231 Pary C, S (i inne) można zawsze zastąpić przez łańcuch złożony z członów połączonych tylo parami R i T 3
232 W uładach zawieraących wyłącznie pary obrotowe R i postępowe T można poszczególnym członom przypisać loalne ułady współrzędnych ieruąc się dwiema zasadami: osie z poszczególnych uładów są zawsze poprowadzone wzdłuż osi par wyznaczaących odpowiednio ierune przesuwu (dla pary T) lub oś obrotu (dla pary R), osie x poszczególnych uładów są zawsze poprowadzone w tai sposób, aby były prostopadłe do osi z + uładu olenego 3
233 33 z rot d z transl x rot a x transl A transf : : : : ) (
234 34 z rot d z transl x rot a x transl A transf : : : : ) (
235 35 z rot d z transl x rot a x transl A transf : : : : ) (
236 całowita transformaca będzie zależna od tylo czterech parametrów zaangażowanych w olene transformace elementarne: odległość a pomiędzy osiami z oraz z, ąt zwichrowania osi z oraz z, odległość d początu uładu {} od osi x mierzone wzdłuż osi z, ąt orientaci osi x względem x obrócone względem osi z PARAMETRY D-H 36
237 37 z rot d z transl x rot a x transl A transf : : : : ) ( cos sin sin cos cos sin sin cos d a A
238 38 cos cos cos sin sin sin sin sin cos cos sin cos sin cos d d a A cos sin sin cos sin cos cos sin cos sin sin sin cos cos d a a A A
239 A a d T ZMIENNA 39
240 4 cos cos cos sin sin sin sin sin cos cos sin cos sin cos d d a A T d a A JEDNA ZMIENNA
241 A a d T ZMIENNA 4
242 l a l c M 3 4
243 z z l a z l c z
244 z z l b q l a x q z x l c z 3 q 3 3 x x 3 44
245 z z l b q l a x q z x l c z 3 q 3 3 x x 3 45
246 q l q q a A A A A d a cos sin sin cos q q q q A cos sin sin cos q q q q A 3 cos 3 sin 3 sin 3 cos 3 q q l a q q A
247 CC CS S SC SS C A 3 S C A 3 CC C3 CS S3 CC S3 CS C3 S l a CC SC C3 SS S3 SC S3 SS C3 C l a SC S C3 C S3 S S3 C C3 l a S c i cos q s sin i i q i r M T 3 rx ry rz A3 rm 3 r M l l c b T 47
248 Punt M w uładzie globalnym {} r l C C C C S S l S l C C x c 3 3 b a r l S C C S S S l C l S C y c 3 3 b a r l S C C S l S z c 3 3 a 48
249 Prędość (i przyspieszenie) 49
250 ZMIENNA d ZMIENNA 5
251 5 ω q, cos cos cos sin sin sin sin sin cos cos sin cos sin cos d d a p R A
252 5 p R p p p p const p p R p p? dt d R R T d d a sin cos p
253 53 z y x e e e R z y x z y x dt d dt d e ω e ω e ω e e e R R x x dt d e ω e e x Pochodna wetora ednostowego:
254 54 z z y y x x z y x p p p e ω e ω e ω p e ω e ω e ω p R p R ω p R p R ω p p PRĘDKOŚĆ POCZĄTKU UKŁADU {} T z y x p p p p
255 55 Iloczyn wetorowy T z y x B T z y x B b b b a a a a b... x z z x y z z y B B B B b a b a b a b a c c b a
256 56 T q q, R ω ω Prędość ątowa członu est sumą wetorową prędości członu w uładzie podstawy i prędości względne, w parze obrotowe Prędość względna, est mierzona wzdłuż osi z a więc e wyrażenie w uładzie podstawy wymaga transformaci z uładu {} do podstawy {} za pomocą macierzy rotaci R PRĘDKOŚĆ KĄTOWA CZŁONU W UKŁADZIE {} T z z q e e R ω ω
257 57 p R p R ω p p p R p p p p d q p R p R p p
258 58 const const a q d q d d a dt d cos sin cos sin p p R p R ω p p Dla pary T, inacze niż dla R, wetor p opisuący pozycę {} w {} est zmienny, a ego pochodna wynosi:
259 59 z e R cos cos sin sin sin sin cos cos sin cos sin cos cos sin z z q q e R e R R p R q cos sin p
260 6 z q e R p R ω p p PRĘDKOŚĆ POCZĄTKU UKŁADU {} PRĘDKOŚĆ KĄTOWA CZŁONU W UKŁADZIE {} ω ω ω,
261 Prędość puntu M na członie -tym {} {} M r M p R r M r M p ω R r M 6
262 A teraz przyspieszenia... 6
263 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 63

264 V M SILNIK Prze- Kładnia = M M w w M w w Przeniesienie ruchu z ednego wału na drugi Zmiana momentu Zmiana prędości obrotowe ORGAN ROBOCZY 64
265 zazębienie Dostarczamy strumień mocy M h M Odbieramy strumień mocy 65

266 Podział przeładni zębatych h typ przeładni h walcowa h stożowa p/ h ślimaowa h śrubowa 66

267 osie stałe osie ruchome arzmo 67

268 PODST JARZMO PODST 68
269 69
270 PRZEKŁADNIE ZĘBATE Przeł. o osiach stałych Przeładnie obiegowe Planetarne: W= Różnicowe i sumuące: W> 7
271 Duże przełożenia przy zwarte budowie Zdolność przenoszenia dużych sił (mocy) Możliwość rozdziału napędu na ila odbiorniów (W>) p. różnicowe Możliwość sumowania ilu napędów (W>) p. sumuące 7
272 Cieawe traetorie puntów ół obiegowych Wysoie wymagania doładnościowe KOSZTY!!! 7
273 Koło obiegowe Jarzmo Koło centralne Koło centralne 73
274 satelita Jarzmo Koło słoneczne Koło słoneczne 74
275 Zdolność przenoszenia dużych sił (mocy) Satelita Satelita 3 Satelita Potroenie liczby par zazębień duże moce i momenty 75
276 Moc: 75 W, i = 8 4x3 6x5 85x5 5x6 Masa 87 g Prz. obiegowe (a- wyonanie specalne) Masa 4 g Prz. zwyłe, szeregowe 76
277 Możliwość rozdziału Napędu na ila odbiorniów (W>) p. różnicowe 77
278 78
279 po-ham.sam 79
280 po-line.sam 8
281 po-stop.sam 8

282 Zazębienie zewnętrzne 8
283 Zazębienie zewnętrzne v R v R R R z z R m z 83

284 Zazębienie wewnętrzne v R v R R R z z 84
285 v B =AB J v B R AB J R vm =S M B S A J J M AB J R AB R R R J R J mz R mz mz z J z z 85
286 Analiza prędości dwa napędy. J v B v B =AB J B vm =S M M. vc vd D J C S v C =R v =v D C 3. S ( podstawa) J A 86
287 3 3 J wido z arzma J J 87
288 3 3 J wido z arzma J J Obroty wzgl. podstawy (oło 3) Obroty wzgl. J Koło n n J = n - n J Koło n n J = n - n J Koło 3 n 3 = n 3J = n 3 - n J Jarzmo n J 88
289 89 3 J i J s J u sj uj z f z z z z J J J J J J J J OSIE STAŁE
290 9 3 J 3 z z J J z z z z J J 3 z z J
291 4 3 Widziane z arzma: 4 3 J J z z z z 3 Ponieważ: 3? J J Wyni: 3 J z z 3 z z 4 9
292 4 3 Zał : z ; z 5; z3 99; z4 5 J ? J J 9
293 J J J J 93
294 J J J J 94

295 95

296 z = ; z = i = =,85 96
297 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 97
298 Dynamia opisue związi pomiędzy: ruchem q(t), siłami czynnymi F C, siłami biernymi F B, siłami tarcia F, masami członów wraz z ich rozłożeniem na członach M ~ czasem t i geometrią członów w f ~ ( q( t), F, F, F, M, t, w) C B 98
299 SIŁY W UKŁADZIE KINEMATYCZNYM 99
300 ODPOWIADA NA PYTANIA: ai est ruch uładu przy znanych siłach czynnych F C i biernych F B? DYNAMIKA PROSTA aa siła czynna F C est potrzebna, aby wywołać oczeiwany ruch q(t)? DYNAMIKA ODWROTNA = KINETOSTATYKA 3
301 I ( x y ) dm Z m I Z I S m( x S y S ) 3
302 F ma F F b F ma b M IS ε M M b M IS ε b 3
303 BC =, m C = 5 s - ( = const) (n = 5 obr/min) Przysp. ąt BC Przysp. p.s 6 S m, J A B ,4,8, czas [s] 33
304 a Smax = 55 ms - C Bcmax = 9 s - m=, g, J=, gm m, J S B A F bmax = - ma = N!!! M bmax = - J = 9 Nm!!! 34
305 e,m F b 5s e S a S e 5ms m g F F b STAT 5 F ma 5 N b 35
306 SIŁA (F b ) i MOMENT (M b ) BEZWŁADNOŚCI F ma b M I ε S b h M F b M M F b b I S ma 36
307 B a S a n S a n S a t S t AS; a AS S S A a S 37
308 h F b B a S a n S a n S a t S t AS; a AS S S W F b M a b m S εi S A a S h M F b b I S ma S 38
309 39 S A B a S S W F b h mas I a a AS ma a I a a ma AS a I a a ma I a a h SW a a SW h S t S S S t S S t S S S t S S t S S S S t S S S t S cos(?)
310 h F b B S W SW IS mas mis mas is AS A a S 3
311 3
312 MASY SKUPIONE CZŁON MODEL 3
313 33 masa członu i modelu są ednaowe m m i środi mas członu i modelu porywaą się S i i S i i my m y mx m x masowe mom. bezwł. członu i modelu są ednaowe S S S i i i I y x m y x m ) ( ) (
314 edna masa supiona opisana przez: m, x, y mas supionych oznacza 3 parametrów 4 równania można wyliczyć 4 parametry opisuące uład mas supionych spośród 3 parametrów można zatem przyąć p p =
315 m, I S a b m m 35
316 a b m m m m m m a m b m a m b I S Parametry : m, m, a, b? Po przyęciu a wyznaczamy m, m oraz b 36
317 37
318 Para rzywowa K II lasy (p ) F iy F ix znany ierune i znany punt przyłożenia edna niewiadoma: sładowa F ix lub F iy 38
319 Para obrotowa R I lasy (p ) F iy znany punt przyłożenia F ix i dwie niewiadome: sładowa F ix sładowa F iy 39
320 Para postępowa T I lasy (p ) F ix F iy znany ierune i dwie niewiadome: punt przyłożenia sładowa F ix lub F iy 3
321 3
322 F F F F 3 F 3 F 3
323 c F 4 F c F F F 3 F 33
324 c F 4 F 3 F c F F 4 F F 3 F 34
325 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 35

326 F M=? 36
327 F F F F M=? 37
328 F F F F M=? 38
329 F F F F M=? 39
330 F F F F M=? F F F 33
331 F F M=? F F F F 33
332 F F F M=? F F F F 33
333 F F F A M=? F h F F F M A Fh M 333
334 334
335 Sprężyna+tłumi 3 S Q 335
336 F 3 Q F 3 S Q 336
337 F 3 F3 3 S Q 337
338 F 3 Q F F 3 F3 3 S F 3 F 3 F Q Q F 338
339 3 S F S F Q F FS 339
340 Dane: 3 m, J masa, masowy mom. bzwł. prędość ątowa m, J M =? oraz siły oddziaływania M =? 34
341 M b F ma b a M J b F b 34
342 M b Para sił M b a Fb h F b F b h M F b b J ma 34
343 M b a F b F b a F b F b h 343
344 3 Człon : F 3 Fb F F b A M 344
345 F 3 c 3 F 3 c Człon : F 3 Fb F Człon 3: F b F 3 F3 F c A M 345
346 3 F 3 F 3 c c F F b h c c F c F 3 A M F c F M A M F h F c 346
347 UKŁAD KINEMATYCZNY W RÓWNOWADZE KAŻDY CZŁON W RÓWNOWADZE DOWOLNIE WYDZIELONA GRUPA CZŁONÓW W RÓWNOWADZE 347
348 F iy F iy F ix F iy F ix F ix i i i NIEWIADOMA NIEWIADOME NIEWIADOME Liczba równań = Liczba niewiadomych 3 = p + p 348
349 PRZYKŁADY GRUP STATYCZNIE WYZNACZALNYCH W T n p 3 p Ruchliwość 3 p p Warune statyczne wyznaczalnośći grupy p 3 p (-p p ) (--) (-3-) (46) 349
350 grupa (--) grupa (-3-) I l - R lub T II l - K lub J lub Z I l - R lub T 35
351 F F 3 F 3 F 3 + F + F = 35
352 Grupy dwuczłonowe RRR RRT RTR RTT TR T 35
353 Grupa RRR uład sił B h 3 h F F F3 F43??? F n A F F 3 F t 3 C F t 43 4 F n
354 Grupa RRR uład sił F t F n F F 3 B h 3 h M F t M F F t 43 AB F n 43 B t Fh Fl AB t 43 Fh l BC B t 3 F3h 3 F43l BC F3h l 3 F n F F 3 A F t 3 C F t 43 4 F n
355 Grupa RRR uład sił F t F F t 43 n F F n 43 F 3 h F B h 3 F 3 3 F F t F 3 F t 43 A F t C F t 43 4 F n F n F n 43 F n
356 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 356
357 Praca siły L s F ds s F cos ds ąt - pomiędzy siłą F i przemieszczeniem ds Praca momentu L M dθ M cos d 357
358 Praca przygotowana (wirtualna) L odnoszona est do tzw. przemieszczeń przygotowanych r i L Fs Fcos s L MΘ M cos 358
359 Zasada prac wirtualnych: Uład inematyczny, w oreślone onfiguraci (położeniu), znadue się w równowadze statyczne lub quasi-statyczne, eżeli suma prac przygotowanych wyonana przez siły i momenty zewnętrzne, w tym również przez siły i momenty masowe, na odpowiadaących im przemieszczeniach przygotowanych est równa zeru. 359
360 36 Θ M s F M s F cos cos t M t s F cos cos
361 36 t t s v M F cos v cos
362 M F a F M = af v M cos F cos F cos v 36
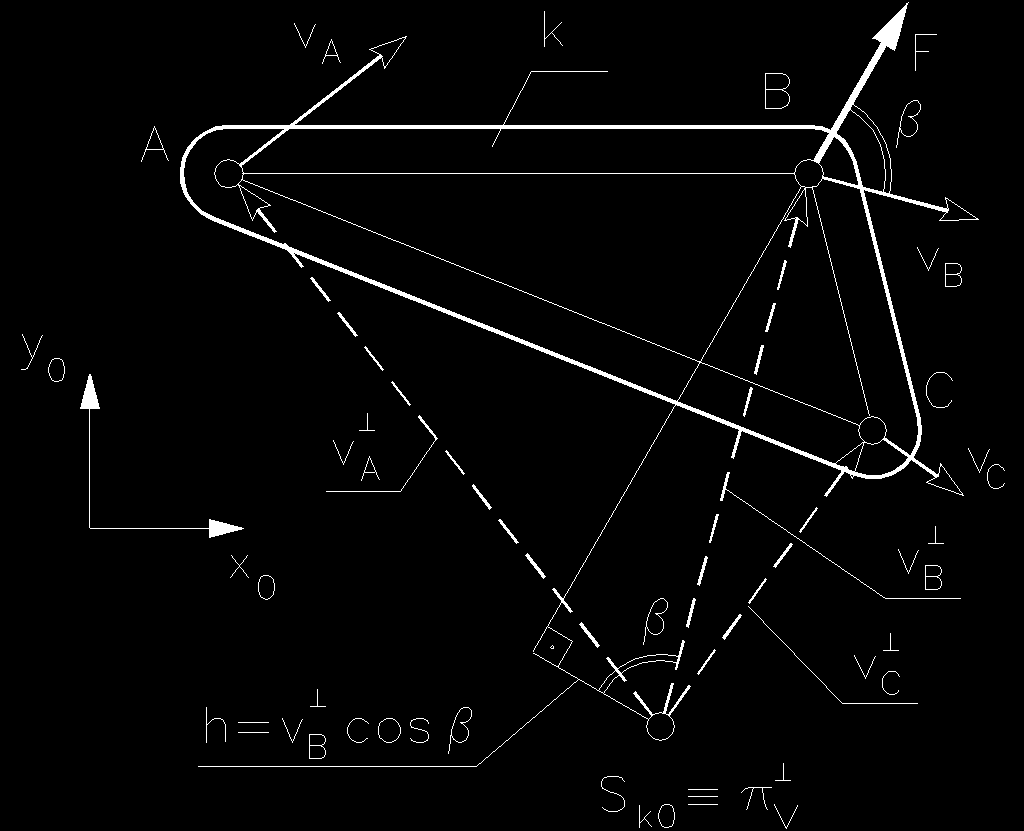
363 363
364 F vcos F h warune równowagi inetostatyczne uładu, sprowadzony do zerowania się sumy mocy od sił zewnętrznych można zapisać ao sumę momentów sił przyłożonych do odpowiednich puntów planu prędości obróconych względem bieguna tego planu F v cos F h 364
365 Przyład met. graficzna B Q v C v B v CB b Q c F A C F=? s a h Qs Fh F Qs / h odwrócony plan prędości 365
366 Praca przygotowana (wirtualna) L Fr Fcos s L MΘ M cos 366
367 367 Przemieszczenia wirtualne są wariacami funci. Uład zamrożony więc czas est stałą (t = const) Ja różniczowanie: - postać awna y y z x x z z t y x z z const t,,,,, z z f y y f x x f t z y x f const t - postać uwiłana
368 Przyład met. analityczna 368
369 x K y K a cos b a sin c x y K K a cos asin b c x K y K a sin a cos 369
370 37 ) (cos ) (sin M F F a a y x x F y a F a M ) (cos ) (sin T K M F r

371 y F e Q 3 a 34 SIŁY CZYNNE f 3 a a 3 f f f f 3? F F ex ey f x SIŁY EFEKTORA 37
372 37? 3 ey ex F F f f f Z zasady prac przygotowanych 3 3 ey ex Q Q F F y x f f f e T T Q u f Θ
373 373 Θ J u J 3 Q Q y x T T T J u Θ e T T Q u f Θ e T T T Q J Θ f Θ e f J T Q J aobian manipulatora
374 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 374
375 Równania N-E RÓWNOWAGA SIŁ, BADANIE RUCHU 375
376 376 Równania Newtona-Eulera (D) y x S y x a a I m m M F F
377 3 równania dla członu łączna liczba równań est wielorotnością liczby członów członów ruchomych dae 3 równań dla płasich 377
378 PRZYKŁAD y b a S e x S h f c d 378
379 siły zewnętrzne y F signv F b a S e M x S h F f c d 379
380 y siły zewnętrzne + siły w parach inemat. b a S F e F x M x S h F F y f F () F () c d 38
381 ZADANIE ODWROTNE DYNAMIKI Dane: wymiary, ruch (położenie, prędość, przyspieszenie), masy m, m i masowy moment bezwładności I, siła oporu F Zadanie: oreślić M (napęd), siły w parach inematycznych F x () () T F F F F F M? x y 38
382 ZADANIE PROSTE DYNAMIKI Dane: wymiary, waruni początowe ruchu (położenie, prędość), masy m, m i masowy moment bezwładności I, siła oporu F, moment czynny M Zadanie: oreślić ruch (przyspieszenie prędość położenie), siły w parach inematycznych F x () () T F F F F F? x y 38
383 ZADANIE ODWROTNE DYNAMIKI F x () () T F F F F F M? x y ZADANIE PROSTE DYNAMIKI F x () () T F F F F F? x y 383
384 384 Współrzędne środa masy S członu sin cos a a y x S S Prędość i przyspieszenie ((t)): cos sin a a y x S S sin cos cos sin a a a a y x S S
385 Dla członu x S bcos f b sin x S x S b sin b cos 385
386 Siły i momenty dla członu F m a sin a cos F y m g m F x a cos a sin a cos asin F F x y F b asin M I Fxasin Fyacos F sin b a M I 386
387 Siły i momenty dla członu F F F m b sin sign v b F cos F () () F mg F () e h bsin Fh F c f bcos F () c d f bcos 387
388 Porządowanie do formy macierzowe!!! dla zadania prostego!!! F GF zn x F zn wetor sił znanych obciążenia zewnętrzne, siły odśrodowe G macierz, tóre elementy zawieraą wyłącznie parametry masowe i geometryczne, F x wetor wielości nieznanych. 388
389 389 T zn Fh g m m b F M m a m g m a cos sin cos F cos cos sin sin sin cos sin cos sin b f d c g b f c g g g b h e m b I a b a a m a m a G
390 F x F x F y F F () F () T F G F x zn CAŁKOWANIE PRZYSPIESZENIE CZŁONU PRĘDKOŚĆ CAŁKOWANIE PRZEMIESZCZENIE 39
391 39 s Q q E q E dt d,,..., s Q q E q E dt d,,..., s Q q E q E dt d,,..., E - energia inetyczna uładu, ażde z s współrzędnych uogólnionych q przypisue się siłę uogólnioną Q (siła uogólniona przypisana współrzędne uogólnione) Równania Lagrange a
392 Z siły Q można wydzielić część Q p od sił potencalnych i część Q z pochodzącą od sił pozostałych pierwsza z sił wyrażona est równaniem Q p P q gdzie P est energią potencalną uładu 39
393 olena postać równania d dt E q E q P q Q z 393
394 czasem est upraszczana d dt L q L q Q z po wprowadzeniu tzw. potencału inetycznego L w postaci L E P 394
395 PRZYKŁAD DANE: masy m i m masowe momenty bezwładności I i I wyprowadzić zależności opisuące ruch uładu przy znanych momentach napędowych M C i M C. 395
396 396 Dwie wsp. Uogólnione dwa równania Lagrange a, i Q L L dt d i i i Energia inetyczna E i potencalną P członu I m a E sin ga m P
397 397 Współrzędne środa masy członu sin sin cos cos a b a b y x S S r S i prędości cos cos sin sin a b a b y x S S S r
398 Energia inetyczna i potencalna członu E T mr S rs I P mg b sin a sin Podstawienia dla uproszczenia zapisu sin i cos i S i C i sin cos S C 398
399 z iloczynu salarnego r r T S S a sin b cos a cos b sin b a a b S S C T r S r S C 399
400 4 Wyorzystuąc relacę na sinus i cosinus sumy ątów C C C S S mamy C b a a b S T S r r
401 4 energia inetyczna członu I b C a a b m E energia potencalna członu S a b S m g P
402 4 potencał inetyczny L P P E E L S a b S m g m ga S I b C a a b m I m a L
403 43 I b C a a b m I m a L I b S a b C a a b m I m a L dt d Kolene pochodne
404 L m a a b C I d dt L m a a b C a b S I 44
405 L m ga C m g b C a C L m abs mgac 45
406 46 M C C a b C m g m gac b S m a b S m a I b C a a m I b C a a b m I m a równanie ruchu członu
407 równanie ruchu członu m a m a m a I b C I m a b S m ga C M C 47
408 . Analiza struturalna. Więzy bierne i ich eliminaca 3. Analiza inematyczna 4. Analiza inematyczna c.d. metody wetorowe 5. Metody analityczne inematyi 6. Charaterystya manipulatorów. Ułady płasie 7. Kinematya manipulatorów, aobian 8. Opis macierzowy uładów przestrzennych 9. Notaca Denavita-Hartenberga. Przeładnie zębate obiegowe. Wprowadzenie do dynamii mechanizmów. Analiza inetostatyczna 3. Analiza sił - metoda prac przygotowanych 4. Badanie ruchu uładów płasich. Modele, reduca sił i mas 5. Nierównomierność biegu maszyny, sposoby regulaci 48
409 MECHANIZM O RUCHLIWOŚCI W= ZNANE OBCIĄŻENIA ZEWNĘTRZNE; ZNANE MASY I MASOWE MOM. BEZWŁADNOŚCI; ZNANY STAN RUCHU W CHWILI t= 49
410 model o ruchu postępowym T m zr - masa zreduowana F zr - siła zreduowana 4
411 model o ruchu obrotowym R I zr - zreduowany masowy moment bezwładności M zr - moment zreduowany 4
412 w oreślonym przedziale czasu praca L sił zewnętrznych wywołue zmianę energii inetyczne E L E Równania ruchu dla modelu o ruchu postępowym m zr F F ds d v Czr Bzr v ds dt F C, F B - siła czynna, bierna 4
413 w oreślonym przedziale czasu praca L sił zewnętrznych wywołue zmianę energii inetyczne E L E Równania ruchu dla modelu o ruchu obrotowym I zr M M d d Czr Bzr d dt M C, M B - moment czynny, bierny 43
414 44 Reduca mas (m zr =, I zr = ) energia inetyczna uładu = energia inetyczna modelu E = E m v i i i i i I m E i i i i i i i I m E E v człon w ruchu płasim członów:
415 E m m v zr dla modelu o ruchu obrotowym E m I zr 45
416 46 Wielości masowe zreduowane dla modelu o ruchu postępowym i i i i i zr I m m v v i i i i i zr I m m v v v
417 47 dla modelu o ruchu obrotowym i i i i i zr I m I v i i i i i zr I m I v
418 v v v m I m I m E Energia inetyczna uładu
419 v v v m I m I m I zr 3 3 v v v v v v v v m I m I m m zr Moment bezwładności zreduowany i masa zreduowana itd v v itd v v v Zależne od położenia uładu!!!
420 Reduca sił w oparciu o porównanie mocy moce rozwiane przez siły zewnętrzne i odpowiednią wielość zreduowaną są sobie równe moc sił zewnętrznych N v i F i M i i moc siły zreduowane i momentu zreduowanego N zr F zr v N zr M zr 4
421 Porównanie N N zr dla modelu o ruchu postępowym F zr v dla modelu o ruchu obrotowym v i Fi M i i M zr v i Fi M i i 4
422 4 suma mocy rozwianych przez siły zewnętrzne 3 3 v M F N dla modelu o ruchu postępowym 3 3 v v v M F F zr dla modelu o ruchu obrotowym 3 3 v F M M zr
423 43 d di d d I I d d M zr dt d I d d M zr d di dt d I M zr
424 44 M zr ma część reprezentuącą siły czynne M Czr i siły bierne M Bzr I d d M M Bzr Czr Całuemy w przedziale od p do p p Bzr Czr I I d M M p d M M I I I p Bzr Czr p p
425 F cyl tłoczni blacha t t F moment napędowy matryca przem. tłocznia 45
426 Przyczyny: zmienny I zr, zmienne momenty: M Czr i M Bzr 46
427 Miara: współczynni nierównomierności biegu: max śr min śr max min 47
428 zr zrp p M Czr M Bzr d p I I Założenia: ruch ustalony, znana sr przebiegi M Czr () i M Bzr () znane zmienność zred. mom. bezwł. pomialna; I zr = const. 48
429 zr zrp p M Czr M Bzr d p I I L p M Czr M Bzr d p min max L I zr max min 49
430 43 min max zr I L min max min max min max min max min max śr śr śr śr śr śr zr śr zr I L I L
431 43 śr zr śr zr I L I L zr śr KZ śr KZ zr I L I I I L ' ' KOŁO ZAMACHOWE
432 GD I 4 4g KZ GD I KZ 43
433 I I KS KW W S I KW I KS I I KS KW W S 433
434 Koło zamachowe pełni rolę mechanicznego aumulatora energii. Aumulue ą w tych fazach ruchu, iedy siły czynne przeważaą nad biernymi i zwięszaą prędość uładu i oddae w fazach przewagi sił biernych, iedy uład ma tendencę do obniżania prędości. 434
PRZEKŁADNIE ZĘBATE. Przekł. o osiach stałych. Przekładnie obiegowe. Planetarne: W=1 Różnicowe i sumujące: W>1
 PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
PRZEKŁADNIE ZĘBATE Przekł. o osiach stałych Przekładnie obiegowe Planetarne: W=1 Różnicowe i sumujące: W>1 Przekładnie obiegowe: Planetarne: W=1 2 I II 3 ( j ) 1 I n=3 p 1 =2 p 2 =1 W = 3(n-1) - 2p 1 -
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny uład przeznaczony do realizaci nietórych funci ręi ludzie. Manus (łacina) - ręa uład mechaniczny Karel Cape R.U.R. (Roboty
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny uład przeznaczony do realizaci nietórych funci ręi ludzie. Manus (łacina) - ręa uład mechaniczny Karel Cape R.U.R. (Roboty
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y
 MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
MECHANIZMY ROBOTÓW M A N I P U L A T O R Y sterowanie Manipulator mechaniczny układ przeznaczony do realizacji niektórych funkcji ręki ludzkiej. Manus (łacina) - ręka układ mechaniczny Karel Capek R.U.R.
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Egzamin 1 Strona 1. Egzamin - AR egz Zad 1. Rozwiązanie: Zad. 2. Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same
 Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Egzamin 1 Strona 1 Egzamin - AR egz1 2005-06 Zad 1. Rozwiązanie: Zad. 2 Rozwiązanie: Koła są takie same, więc prędkości kątowe też są takie same Zad.3 Rozwiązanie: Zad.4 Rozwiązanie: Egzamin 1 Strona 2
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Teoria maszyn mechanizmów
 Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Adam Morecki - Jan Oderfel Teoria maszyn mechanizmów Państwowe Wydawnictwo Naukowe SPIS RZECZY Przedmowa 9 Część pierwsza. MECHANIKA MASZYN I MECHANIZMÓW Z CZŁONAMI SZTYWNYMI 13 1. Pojęcia wstępne do teorii
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) moment - prędkość kątowa Energia kinetyczna Praca E W k Fl Fr d de k dw d ( ) Równanie ruchu obrotowego (bryły sztywnej) d ( ) d d d
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Mechanika teoretyczna
 Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Wypadkowa -metoda analityczna Mechanika teoretyczna Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Rodzaje ustrojów prętowych. Składowe poszczególnych sił układu: Składowe
Elementy dynamiki mechanizmów
 Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Elementy dynamiki mechanizmów Dynamika pojęcia podstawowe Dynamika dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem
Napęd pojęcia podstawowe
 Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
Napęd pojęcia podstawowe Równanie ruchu obrotowego (bryły sztywnej) suma momentów działających na bryłę - prędkość kątowa J moment bezwładności d dt ( J ) d dt J d dt dj dt J d dt dj d Równanie ruchu obrotowego
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych
 Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Podstawy analizy strukturalnej układów kinematycznych Układem kinematycznym nazywamy dowolny zespół elementów składowych (członów) połączonych ze sobą w sposób umożliwiający ruch względny stworzony przez
Ogłoszenie. Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz
 Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Laboratorium Badań Technoklimatycznych i Maszyn Roboczych Ogłoszenie Egzaminy z TEORII MASZYN I MECHANIZMÓW dla grup 12A1, 12A2, 12A3 odbędą się w sali A3: I termin 1 lutego 2017 r. godz. 9 00 12 00. II
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
WAHADŁO SPRĘŻYNOWE. POMIAR POLA ELIPSY ENERGII.
 ĆWICZENIE 3. WAHADŁO SPRĘŻYNOWE. POMIAR POLA ELIPSY ENERGII. 1. Oscylator harmoniczny. Wprowadzenie Oscylatorem harmonicznym nazywamy punt materialny, na tóry,działa siła sierowana do pewnego centrum,
ĆWICZENIE 3. WAHADŁO SPRĘŻYNOWE. POMIAR POLA ELIPSY ENERGII. 1. Oscylator harmoniczny. Wprowadzenie Oscylatorem harmonicznym nazywamy punt materialny, na tóry,działa siła sierowana do pewnego centrum,
Opis ruchu obrotowego
 Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Z poprzedniego wykładu:
 Z orzedniego wykładu: Człon: Ciało stałe osiadające możliwość oruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stoni swobody) Niższe i wyższe ary kinematyczne
Z orzedniego wykładu: Człon: Ciało stałe osiadające możliwość oruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stoni swobody) Niższe i wyższe ary kinematyczne
Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Teoria Maszyn i Mechanizmów Prof. dr hab. inż. Janusz Frączek Instytut
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Dynamika mechanizmów
 Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Dynamika mechanizmów napędy zadanie odwrotne dynamiki zadanie proste dynamiki ogniwa maszyny 1 Modelowanie dynamiki mechanizmów wymuszenie siłowe od napędów struktura mechanizmu, wymiary ogniw siły przyłożone
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Podstawy robotyki wykład VI. Dynamika manipulatora
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
ZARYS TEORII MECHANIZMÓW I MASZYN
 cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
cssno JAN ODERFELD ZARYS TEORII MECHANIZMÓW I MASZYN ŁÓDŹ - 1959 - WARSZAWA PAŃSTWOWE WYDAWNICTWO NAUKOWE Spia- rzeczy SPIS' RZECZY Pr a edmowa... 4... *.... 3 1. Wstęp '. 5 2. Struktura mechanizmów-k
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw udowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2016/2017
DRGANIA WŁASNE RAM OBLICZANIE CZĘSTOŚCI KOŁOWYCH DRGAŃ WŁASNYCH
 Część 5. DRGANIA WŁASNE RAM OBLICZANIE CZĘSTOŚCI KOŁOWYCH... 5. 5. DRGANIA WŁASNE RAM OBLICZANIE CZĘSTOŚCI KOŁOWYCH DRGAŃ WŁASNYCH 5.. Wprowadzenie Rozwiązywanie zadań z zaresu dynamii budowli sprowadza
Część 5. DRGANIA WŁASNE RAM OBLICZANIE CZĘSTOŚCI KOŁOWYCH... 5. 5. DRGANIA WŁASNE RAM OBLICZANIE CZĘSTOŚCI KOŁOWYCH DRGAŃ WŁASNYCH 5.. Wprowadzenie Rozwiązywanie zadań z zaresu dynamii budowli sprowadza
Mechanika. Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji.
 Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Mechanika Wykład nr 2 Wypadkowa dowolnego układu sił. Równowaga. Rodzaje sił i obciążeń. Wyznaczanie reakcji. Przyłożenie układu zerowego (układ sił równoważących się, np. dwie siły o takiej samej mierze,
Dynamika manipulatora. Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska. Podstawy robotyki wykład VI
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Zadania kinematyki mechanizmów
 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Katedra Fizyki Doświadczalnej, W11, PWr Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Dynamika Newtonowska trzy zasady dynamiki
 Dynamika Newtonowska trzy zasady dynamiki I. Zasada bezwładności Gdy działające siły równoważą się ciało fizyczne pozostaje w spoczynku lubporusza się ruchem prostoliniowym ze stałą prędkością. II. Zasada
Dynamika Newtonowska trzy zasady dynamiki I. Zasada bezwładności Gdy działające siły równoważą się ciało fizyczne pozostaje w spoczynku lubporusza się ruchem prostoliniowym ze stałą prędkością. II. Zasada
Zadania do rozdziału 5
 Zadania do rozdziału 5 Zad.5.1. Udowodnij, że stosując równię pochyłą o dającym się zmieniać ącie nachylenia α można wyznaczyć współczynni tarcia statycznego µ o. ozwiązanie: W czasie zsuwania się po równi
Zadania do rozdziału 5 Zad.5.1. Udowodnij, że stosując równię pochyłą o dającym się zmieniać ącie nachylenia α można wyznaczyć współczynni tarcia statycznego µ o. ozwiązanie: W czasie zsuwania się po równi
Podstawy fizyki wykład 4
 Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
Podstawy fizyki wykład 4 Dr Piotr Sitarek Instytut Fizyki, Politechnika Wrocławska Dynamika Obroty wielkości liniowe a kątowe energia kinetyczna w ruchu obrotowym moment bezwładności moment siły II zasada
MECHANIKA II. Praca i energia punktu materialnego
 MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Teoria maszyn i mechanizmów Kod przedmiotu
 Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Teoria maszyn i mechanizmów - opis przedmiotu Informacje ogólne Nazwa przedmiotu Teoria maszyn i mechanizmów Kod przedmiotu 06.1-WM-MiBM-P-54_15gen Wydział Kierunek Wydział Mechaniczny Mechanika i budowa
Mechanika Analityczna
 Mechanika Analityczna Wykład 2 - Zasada prac przygotowanych i ogólne równanie dynamiki Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej 29 lutego 2016 Plan wykładu
Mechanika Analityczna Wykład 2 - Zasada prac przygotowanych i ogólne równanie dynamiki Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej 29 lutego 2016 Plan wykładu
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ
 ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ LISTA ZADAŃ 1 1 Napisać w formie rozwiniętej następujące wyrażenia: 4 (a 2 + b +1 =0 5 a i b j =1 n a i b j =1 n =0 (a nb 4 3 (! + ib i=3 =1 2 Wyorzystując twierdzenie o
ALGEBRA Z GEOMETRIĄ ANALITYCZNĄ LISTA ZADAŃ 1 1 Napisać w formie rozwiniętej następujące wyrażenia: 4 (a 2 + b +1 =0 5 a i b j =1 n a i b j =1 n =0 (a nb 4 3 (! + ib i=3 =1 2 Wyorzystując twierdzenie o
MECHANIKA II. Dynamika układu punktów materialnych
 MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
d J m m dt model maszyny prądu stałego
 model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
model maszyny prądu stałego dit ut itr t Lt E u dt E c d J m m dt m e 0 m c i. O wartości wzbudzenia decyduje prąd wzbudzenia zmienną sterująca strumieniem jest i, 2. O wartości momentu decyduje prąd twornika
Spis treści. Przedmowa... 7
 Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
Spis treści SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac przygotowanych... 22 1.4. Przyrost funkcji i wariacja funkcji...
MECHANIKA 2 KINEMATYKA. Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
MECHANIKA 2 KINEMATYKA Wykład Nr 5 RUCH KULISTY I RUCH OGÓLNY BRYŁY Prowadzący: dr Krzysztof Polko Określenie położenia ciała sztywnego Pierwszy sposób: Określamy położenia trzech punktów ciała nie leżących
1. RACHUNEK WEKTOROWY
 1 RACHUNEK WEKTOROWY 1 Rozstrzygnąć, czy możliwe jest y wartość sumy dwóch wetorów yła równa długości ażdego z nich 2 Dane są wetory: a i 3 j 2 ; 4 j = + = Oliczyć: a+, a, oraz a 3 Jai ąt tworzą dwa jednaowe
1 RACHUNEK WEKTOROWY 1 Rozstrzygnąć, czy możliwe jest y wartość sumy dwóch wetorów yła równa długości ażdego z nich 2 Dane są wetory: a i 3 j 2 ; 4 j = + = Oliczyć: a+, a, oraz a 3 Jai ąt tworzą dwa jednaowe
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Z-ETI-1027 Mechanika techniczna II Technical mechanics II. Stacjonarne. Katedra Inżynierii Produkcji Dr inż. Stanisław Wójcik
 Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego Z-ETI-1027 Mechanika
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie
 Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
Mechanika ogólna Kierunek: budownictwo, sem. II studia zaoczne, I stopnia inżynierskie materiały pomocnicze do zajęć audytoryjnych i projektowych opracowanie: dr inż. Piotr Dębski, dr inż. Dariusz Zaręba
KINEMATYKA POŁĄCZEŃ STAWOWYCH
 KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
KINEMATYKA POŁĄCZEŃ STAWOWYCH RUCHOMOŚĆ STAWÓW Ruchomość określa zakres ruchów w stawach, jedną z funkcjonalnych właściwości połączeń stawowych. WyróŜniamy ruchomość: czynną zakres ruchu jaki uzyskamy
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1. MECHANIKA OGÓLNA - lista zadań 2016/17
 Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
Mechanika ogólna Wydział Budownictwa Politechniki Wrocławskiej Strona 1 MECHANIKA OGÓLNA - lista zadań 2016/17 Część 1 analiza kinematyczna układów płaskich Przeprowadzić analizę kinematyczną układu. Odpowiednią
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Mechanika Ogólna General Mechanics. Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
13. 13. BELKI CIĄGŁE STATYCZNIE NIEWYZNACZALNE
 Część 3. BELKI CIĄGŁE STATYCZNIE NIEWYZNACZALNE 3. 3. BELKI CIĄGŁE STATYCZNIE NIEWYZNACZALNE 3.. Metoda trzech momentów Rozwiązanie wieloprzęsłowych bele statycznie niewyznaczalnych można ułatwić w znaczącym
Część 3. BELKI CIĄGŁE STATYCZNIE NIEWYZNACZALNE 3. 3. BELKI CIĄGŁE STATYCZNIE NIEWYZNACZALNE 3.. Metoda trzech momentów Rozwiązanie wieloprzęsłowych bele statycznie niewyznaczalnych można ułatwić w znaczącym
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Manipulatory i roboty mobilne AR S1 semestr 5
 Manipulatory i roboty mobilne AR S semestr 5 Konrad Słodowicz MN: Zadanie proste kinematyki manipulatora szeregowego - DOF Położenie manipulatora opisać można dwojako w przestrzeni kartezjańskiej lub zmiennych
Manipulatory i roboty mobilne AR S semestr 5 Konrad Słodowicz MN: Zadanie proste kinematyki manipulatora szeregowego - DOF Położenie manipulatora opisać można dwojako w przestrzeni kartezjańskiej lub zmiennych
Zadania kinematyki mechanizmów
 Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Zadania kinematyki mechanizmów struktura mechanizmu wymiary ogniw ruch ogniw napędowych związki kinematyczne położeń, prędkości, przyspieszeń ogniw zadanie proste kinematyki zadanie odwrotne kinematyki
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia
 modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia") Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Karta (sylabus) modułu/przedmiotu INŻYNIERIA MATERIAŁOWA Studia pierwszego stopnia Przedmiot: Mechanika Rodzaj przedmiotu: Obowiązkowy Kod przedmiotu: IM 1 S 0 2 24-0_1 Rok: I Semestr: 2 Forma studiów:
Mechanika teoretyczna
 Przedmiot Mechanika teoretyczna Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Mechanika: ogólna, techniczna, teoretyczna. Dział fizyki zajmujący się badaniem
Przedmiot Mechanika teoretyczna Wykład nr 1 Wprowadzenie i podstawowe pojęcia. Rachunek wektorowy. Wypadkowa układu sił. Mechanika: ogólna, techniczna, teoretyczna. Dział fizyki zajmujący się badaniem
PAiTM - zima 2014/2015
 PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
PAiTM - zima 204/205 Wyznaczanie przyspieszeń mechanizmu płaskiego metodą planu przyspieszeń (metoda wykreślna) Dane: geometria mechanizmu (wymiary elementów, ich położenie i orientacja) oraz stała prędkość
układ materialny wytworzony przez człowieka, wykonujący użyteczne działanie dzięki energii doprowadzonej z zewnątrz
 Maszyna układ materialny wytworzony przez człowieka, wykonujący użyteczne działanie dzięki energii doprowadzonej z zewnątrz Pod względem energetycznym podział na: SILNIKI - pobierają energię z zewnętrznego
Maszyna układ materialny wytworzony przez człowieka, wykonujący użyteczne działanie dzięki energii doprowadzonej z zewnątrz Pod względem energetycznym podział na: SILNIKI - pobierają energię z zewnętrznego
Ruch obrotowy bryły sztywnej. Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe
 Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
KARTA PRZEDMIOTU 1/6. Wydział Mechaniczny PWR. Nazwa w języku polskim: Mechanika I. Nazwa w języku angielskim: Mechanics I
 Wydział Mechaniczny PWR KARTA PRZEDMIOTU Nazwa w języku polskim: Mechanika I Nazwa w języku angielskim: Mechanics I Kierunek studiów (jeśli dotyczy): Mechanika i Budowa Maszyn Stopień studiów i forma:
Wydział Mechaniczny PWR KARTA PRZEDMIOTU Nazwa w języku polskim: Mechanika I Nazwa w języku angielskim: Mechanics I Kierunek studiów (jeśli dotyczy): Mechanika i Budowa Maszyn Stopień studiów i forma:
Roboty przemysłowe. Wprowadzenie
 Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Roboty przemysłowe Wprowadzenie Pojęcia podstawowe Manipulator jest to mechanizm cybernetyczny przeznaczony do realizacji niektórych funkcji kończyny górnej człowieka. Należy wyróżnić dwa rodzaje funkcji
Metody Lagrange a i Hamiltona w Mechanice
 Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyi i Informatyi Stosowanej Aademia Górniczo-Hutnicza Wyład 12 M. Przybycień (WFiIS AGH Metody Lagrange a i Hamiltona... Wyład 12
Metody Lagrange a i Hamiltona w Mechanice Mariusz Przybycień Wydział Fizyi i Informatyi Stosowanej Aademia Górniczo-Hutnicza Wyład 12 M. Przybycień (WFiIS AGH Metody Lagrange a i Hamiltona... Wyład 12
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO
 TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
TEMAT: PARAMETRY PRACY I CHARAKTERYSTYKI SILNIKA TŁOKOWEGO Wielkościami liczbowymi charakteryzującymi pracę silnika są parametry pracy silnika do których zalicza się: 1. Średnie ciśnienia obiegu 2. Prędkości
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!)
") Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Podstawy fizyki sezon 1 V. Ruch obrotowy 1 (!) Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Kinematyka ruchu
Mechanika. Wykład Nr 1 Statyka
 1 Mechanika Wykład Nr 1 Statyka literatura, pojęcia podstawowe, wielkości fizyczne, działania na wektorach, rodzaje obciążeń, więzy i reakcje, aksjomaty statyki, środkowy układ sił redukcja i warunek równowagi,
1 Mechanika Wykład Nr 1 Statyka literatura, pojęcia podstawowe, wielkości fizyczne, działania na wektorach, rodzaje obciążeń, więzy i reakcje, aksjomaty statyki, środkowy układ sił redukcja i warunek równowagi,
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
(12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1
 OPIS PATENTOWY (19) PL (11) 174940 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174940 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 305007 (22) Data zgłoszenia: 12.09.1994 (51) IntCl6: B25J 9/06 B25J
Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora
 Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora AiR V sem. Gr. A4/ Wicher Bartłomiej Pilewski Wiktor 9 stycznia 011 1 1 Wstęp Rysunek 1: Schematyczne przedstawienie manipulatora W poniższym
Podstawy Robotyki Określenie kinematyki oraz dynamiki manipulatora AiR V sem. Gr. A4/ Wicher Bartłomiej Pilewski Wiktor 9 stycznia 011 1 1 Wstęp Rysunek 1: Schematyczne przedstawienie manipulatora W poniższym
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
Zasady i kryteria zaliczenia: Zaliczenie pisemne w formie pytań opisowych, testowych i rachunkowych.
 Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Jednostka prowadząca: Wydział Techniczny Kierunek studiów: Inżynieria bezpieczeństwa Nazwa przedmiotu: Mechanika techniczna Charakter przedmiotu: podstawowy, obowiązkowy Typ studiów: inżynierskie pierwszego
Analiza wpływu tarcia na reakcje w parach kinematycznych i sprawność i mechanizmów.
 Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
Automatyka i Robotyka. Podstawy modelowania i syntezy mechanizmów arcie w parach kinematycznych mechanizmów 1 ARCIE W PARACH KINEMAYCZNYCH MECHANIZMÓW Analiza wpływu tarcia na reakcje w parach kinematycznych
PODSTAWY RACHUNKU WEKTOROWEGO
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Adam Wosatko Ewa Pabisek Skalar Definicja Skalar wielkość fizyczna (lub geometryczna)
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:
 przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia. Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu:") Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Karta (sylabus) przedmiotu Kierunek studiów Mechatronika Studia pierwszego stopnia Przedmiot: Mechanika Techniczna Rodzaj przedmiotu: Podstawowy Kod przedmiotu: MT 1 S 0 2 14-0_1 Rok: I Semestr: II Forma
Bryła sztywna. Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka
 Wykład XXIII: Przypomnienie: statyka") Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Bryła sztywna Fizyka I (B+C) Wykład XXIII: Przypomnienie: statyka Moment bezwładności Prawa ruchu Energia ruchu obrotowego Porównanie ruchu obrotowego z ruchem postępowym Przypomnienie Równowaga bryły
Zasady dynamiki Newtona. Ilość ruchu, stan ruchu danego ciała opisuje pęd
 Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
Nr 2. Laboratorium Maszyny CNC. Politechnika Poznańska Instytut Technologii Mechanicznej
 Politechnia Poznańsa Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 2 Badania symulacyjne napędów obrabiare sterowanych numerycznie Opracował: Dr inż. Wojciech Ptaszyńsi Poznań, 3 stycznia
Politechnia Poznańsa Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 2 Badania symulacyjne napędów obrabiare sterowanych numerycznie Opracował: Dr inż. Wojciech Ptaszyńsi Poznań, 3 stycznia
PF11- Dynamika bryły sztywnej.
 Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Mechanika Techniczna I Engineering Mechanics I. Transport I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014