ANDRZEJ B ASZCZYK ISBN
|
|
|
- Alicja Maj
- 7 lat temu
- Przeglądów:
Transkrypt

1 ANDRZEJ B ASZCZYK ISBN ód 0
2 ANDRZEJ BŁASZCZYK POMPY SPEŁNIAJCE SPECJALNE WYMAGANIA RUCHOWE Monografie Politechniki Łódzkiej Łód 0
3 Recenzenci: prof. dr hab. in. Waldemar Jdral, PW dr hab. in. Andrzej Korczak, prof. Pl KOMITET REDAKCYJNY WYDAWNICTWA POLITECHNIKI ŁÓDZKIEJ Przewodniczcy: prof. dr hab. in. Piotr Wodziski Redaktor Naukowy Wydziału: prof. dr hab. in. Tomasz Kapitaniak Redaktor Serii: prof. dr hab. in. Piotr Wodziski Projekt okładki: Jowita Błaszczyk Copyright by Politechnika Łódzka 0 WYDAWNICTWO POLITECHNIKI ŁÓDZKIEJ Łód, ul. Wólczaska 3 tel/fax zamowienia@info.p.lodz.pl ISBN Nakład 00 egz. Ark druk. 0,0. Papier offset. 80 g 70 x 00 Druk ukoczono w czerwcu 0 r. Wykonano w Drukarni Quick-Druk, Łód, ul. Łkowa Nr 964
4 SPIS TRECI SPIS TRECI... WYKAZ RYSUNKÓW...6 WYKAZ WANIEJSZYCH OZNACZE...3 PRZEDMOWA...7. WSTP...9. WSPÓŁPRACA POMPY Z UKŁADEM POMPOWYM Charakterystyki pomp wirowych Charakterystyka oporu hydraulicznego układu pompowego JEDNOWYMIAROWY MODEL W POMPIE ODRODKOWEJ PRZEPŁYW PRZEZ WIRNIK POMPY ODRODKOWEJ Kinematyka przepływu na wlocie do wieca łopatkowego wirnika Kinematyka przepływu na wylocie z wieca łopatkowego wirnika Straty hydrauliczne w wirniku ELEMENTY DOPROWADZAJCE CIECZ DO WIRNIKA ELEMENTY ODPROWADZAJCE CIECZ Kierownica bezłopatkowa Kinematyka przepływu przez kierownic bezłopatkow Straty hydrauliczne w przepływie przez kierownic bezłopatkow Łopatkowa kierownica od rodkowa Kinematyka przepływu przez łopatkow kierownic od rodkow Straty hydrauliczne w przepływie przez łopatkow kierownic od rodkow Metodyka analitycznego projektowania łopatkowej kierownicy od rodkowej Szeroko kanału hydraulicznego w przekroju merydionalnym Współczynnik powierzchni przekroju hydraulicznego kierownicy od rodkowej Składowa obwodowa prdko ci redniej cieczy w łopatkowej kierownicy od rodkowej Kt konstrukcyjny łopatki kierownicy Współrzdne biegunowe szkieletowej łopatki kierownicy od rodkowej Zmiana krtu cieczy w funkcji promienia od rodkowej kierownicy łopatkowej Kt konstrukcyjny łopatki kierownicy od rodkowej Współrzdne biegunowe szkieletowej łopatki kierownicy od rodkowej Przewał i łopatkowa kierownica do rodkowa Kinematyka przepływu przez przewał Straty przepływu przez przewał Kinematyka przepływu przez łopatkow kierownic do rodkow Straty hydrauliczne w przepływie przez łopatkow kierownic do rodkow Metodyka analitycznego projektowania łopatkowej kierownicy do rodkowej...0 3
5 6.5.. Szeroko kanału hydraulicznego w przekroju merydionalnym łopatkowej kierownicy do rodkowej Współczynnik zacie nienia powierzchni przekroju przepływowego do rodkowej kierownicy łopatkowej Składowa obwodowa redniej prdko ci cieczy w do rodkowej kierownicy łopatkowej Kt konstrukcyjny łopatki kierownicy do rodkowej Współrzdne biegunowe szkieletowej łopatki kierownicy do rodkowej Zmiana krtu cieczy w funkcji promienia do rodkowej kierownicy łopatkowej Kt konstrukcyjny łopatki kierownicy do rodkowej Współrzdne biegunowe łopatki kierownicy do rodkowej Kolektory zbiorcze Spiralne kanały zbiorcze Przepływ przez spiralny kanał zbiorczy Straty hydrauliczne w spiralnym kanale zbiorczym Metoda wyznaczania głównych wymiarów spirali Kolektory o stałym przekroju ZWIZKI I ZALENOCI PARAMETRÓW GEOMETRYCZNYCH Z KINEMATYCZNYMI ORAZ STRATY HYDRAULICZNE W ELEMENTACH UKŁADÓW PRZEPŁYWOWYCH MONOBLOKOWYCH POMP JEDNOSTOPNIOWYCH Straty hydrauliczne w wirniku Straty hydrauliczne kierownicy bezłopatkowej Straty hydrauliczne kierownicy promieniowo-osiowej Straty hydrauliczne w płaszczu wodnym Straty hydrauliczne króca tłocznego BADANIE STRUKTURY PRZEPŁYWU W ELEMENTACH HYDRAULICZNYCH POMP WIROWYCH Wprowadzenie Badania numeryczne układu hydraulicznego stopnia od rodkowej pompy wielostopniowej Przygotowanie wirtualnej geometrii Generacja siatki dla programu obliczeniowego Opis wykorzystywanej metody obliczeniowej Obliczenie przepływu przez wirnik Obliczenie przepływu przez elementy nieruchome Metoda rozwizywania równa liniowych Badania do wiadczalne stopnia od rodkowej pompy wielostopniowej Stanowisko badawcze Pomiar wydajno ci Pomiary mocy i czsto ci obrotów Pomiar ci nie statycznych Przyrzdy do pomiaru parametrów lokalnych Parametry lokalne cieczy i współczynniki pracy kierownicy Niepewno pomiarów Wyniki oblicze numerycznych i bada do wiadczalnych...8 4
6 8.4. Analiza porównawcza wyników oblicze numerycznych i pomiarów stopnia pompy od rodkowej wielostopniowej Badania numeryczne wybranych elementów układu hydraulicznego monoblokowej pompy jednostopniowej Warunki brzegowe Model turbulencji Algorytm wyznaczenia lepko ci efektywnej schematem algebraicznym na podstawie modelu Baldwina-Lomaxa Algorytm oblicze Wyniki oblicze numerycznych przepływu trójwymiarowego w elementach układu hydraulicznego pompy monoblokowej jednostopniowej Przepływ w wirniku pompy Przepływ w kierownicy promieniowo-osiowej Badania do wiadczalne jednostopniowej pompy Stanowisko badawcze Pomiar wydajno ci, poboru mocy i czsto ci obrotów pompy Pomiar ci nie statycznych Analiza porównawcza wyników oblicze numerycznych i bada do wiadczalnych Wirnik Kierownica promieniowo-osiowa Podsumowanie METODY PROJEKTOWANIA POMP SPEŁNIAJCYCH SPECJALNE WYMAGANIA RUCHOWE Wprowadzenie Metoda projektowania pomp promieniowych o nieprzecialnych charakterystykach poboru mocy NCPM Wprowadzenie Algorytm metody projektowania Wzory i zaleno ci wystpujce w metodzie Metoda projektowania pomp promieniowych o danym kształcie charakterystyki przepływowej Wprowadzenie Algorytm metody projektowania Wzory i zaleno ci wystpujce w metodzie Metoda projektowania pomp spełniajce specjalne wymagania eksploatacyjno-ruchowe z wykorzystaniem numerycznej analizy przepływów trójwymiarowych Wprowadzenie Algorytm metody projektowania Wzory i zaleno ci zastosowane w metodzie Metoda projektowania stopni od rodkowych pomp wielostopniowych o danej charakterystyce przepływu Wprowadzenie Algorytm metody projektowania Wzory i zaleno ci wystpujce w metodzie ZAKOCZENIE LITERATURA
7 WYKAZ RYSUNKÓW Rys... Podział przenoników cieczy... 9 Rys... Podział pomp na rodziny i grupy... 0 Rys..3. Charakterystyka przepływu H (Q) pompy wyporowej... Rys..4. Charakterystyka przepływu pompy wirowej... Rys..5. Profile jednostrumieniowych wirników pomp wirowych... 3 Rys..6. Kształty wirników w zalenoci od wartoci wyrónika szybkobienoci... 4 Rys... Charakterystyki odrodkowej pompy wirowej Rys... Charakterystyka przepływu... 8 Rys..3. Charakterystyka przepływu pompy... 8 Rys..4. Kształty charakterystyk poboru mocy przez pomp... 9 Rys..5. Schemat układu pompowego ssawno-tłoczcego Rys..6. Schemat układu pompowego z napływem Rys..7. Współczynnik strat λ w rurze kołowej wg L. Mood ego dla chropowatoci naturalnych Rys..8. Gwałtowana zmiana przekrojów rurocigu układu pompowego Rys..9. Charakterystyka oporu hydraulicznego układu pompowego Rys..0. Współpraca pompy z układem pompowym Rys... Zmiana połoenia punktu pracy w skutek zmiany statycznej wysokoci podnoszenia układu pompowego Rys... Schemat granicznych wariantów współpracy pompy z rónymi układami pompowymi Rys..3. Współpraca pompy z układami pompowymi o zrónicowanych charakterystykach oporu hydraulicznego Rys..4. Zmiana połoenia punktu pracy pompy wskutek zmiany dynamicznej charakterystyki układu pompowego... 4 Rys..5. Zmiana połoenia punktu pracy pompy wskutek jednoczesnej zmiany statycznej i dynamicznej charakterystyki oporu hydraulicznego układu pompowego... 4 Rys..6. Układ pompowy ssawny... 4 Rys..7. Układ pompowy ssawno-tłoczcy... 4 Rys..8. Układ pompowy o obiegu zamknitym Rys..9. Układ pompowy z wspomaganiem przepływu Rys. 3.. Konstrukcja rodkowej linii prdu Rys. 3.. Schemat układu hydraulicznego stopnia odrodkowej pompy wielostopniowej Rys Schemat układu hydraulicznego monoblokowej pompy jednostopniowej kierownic promieniowo-osiow i płaszczem wodnym Rys Elementy układu hydraulicznego monoblokowej pompy jednostopniowej Rys Elementy układu hydraulicznego wielostopniowej pompy odrodkowej Rys Trójkty prdkoci cieczy przepływajcej przez palisad łopatkow wirnika
8 Rys Trójkty prdkoci przepływu cieczy w płaszczyznach kontrolnych na wlocie i wylocie w nieruchomych elementach układu hydraulicznego pompy Rys Przekroje kontrolne w układzie hydraulicznym... 5 Rys Kinematyka przepływu przez kanał hydrauliczny wirnika Rys. 4.. Główne wymiary wirnika zamknitego Rys. 4.. Szkieletowe łopatek Rys Przekroje merydionalne wirników otwartych pomp odrodkowych Rys Napływ cieczy na łopatk wirnika z zawirowaniem wstpnym współbienym Rys Napływ cieczy na łopatk wirnika z zawirowaniem wstpnym przeciwbienym Rys Napływ cieczy na łopatk wirnika bez zawirowania wstpnego... 6 Rys Napływ cieczy na łopatk wirnika z du ujemn wartoci kta natarcia... 6 Rys Napływ cieczy na łopatk wirnika z du dodatni wartoci kta natarcia... 6 Rys Trójkty prdkoci na wylocie z wieca łopatkowego wirnika Rys Trójkt prdkoci na wylocie z wirnika. Kt odchylenia strugi ϑ... 7 Rys. 4.. Kinematyka przepływu cieczy na wylocie z wirnika z łopatk o zerowej sile nonej... 7 Rys. 4.. Zmiana połoenia wierzchołka wylotowego trójkta prdkoci podczas zmian wydajnoci dla hipotezy B = const, β = const i µ = const... 7 Rys Współczynnik strat hydraulicznych ς 0 ( / ) N wirnika Rys. 5.. Schematy wybranych kanałów przepływowych doprowadzajcych ciecz do wirnika Rys. 5.. Rozkład prdkoci w komorze wlotowej pompy odrodkowej wielostopniowej Rys. 6.. Bezłopatkowa kierownica odrodkowa - główne wymiary oraz kinematyka na wlocie i wylocie... 8 Rys. 6.. Współczynnik strat hydraulicznych ς ( 3 / N ) kierownicy bezłopatkowej Rys Łopatkowa kierownica odrodkowa - główne wymiary Rys Zaleno współczynnika K od wyrónika csp n wg A.J. Stepanoffa q Rys Kinematyka przepływu cieczy przez łopatkow kierownic odrodkow Rys Współczynnik strat hydraulicznych ς 3 4 ( / N ) odrodkowej kierownicy łopatkowej... 9 Rys Stosowane w praktyce kształty przekroju merydionalnego odrodkowych kierownic łopatkowych Rys Zarys przekroju merydionalnego i zaleno b (R) Rys Wpływ szerokoci kanału b(r) na kształt łopatki przy tym samym przebiegu ( R ) c u 7
9 Rys Współrzdne biegunowe ( R, θ ) szkieletowej łopatki kierownicy odrodkowej i teoretyczna kinematyka przepływu Rys. 6.. Przykładowa zmiana krtu w funkcji promienia łopatkowej kierownicy odrodkowej Rys. 6.. Współczynnik strat hydraulicznych ς ( 4 5 / N ) w przewale bezłopatkowym Rys Główne wymiary kierownicy dorodkowej Rys Kinematyka przepływu przez łopatkow kierownic dorodkow Rys Współczynnik strat hydraulicznych ς ( 5 6 / N ) w dorodkowej kierownicy łopatkowej Rys Zarys przekroju merydionalnego kierownicy dorodkowej i zaleno b (R)... Rys Współrzdne biegunowe ( R, θ ) szkieletowej łopatki kierownicy dorodkowej... 5 Rys Przykładowa zmiana krtu w funkcji promienia kierownicy dorodkowej... 7 Rys Przekroje poprzeczne zarysów spiralnych kanałów zbiorczych... 0 Rys Spiralny kanał zbiorczy i dyfuzor wylotowy... 0 Rys. 6.. Zaleno kta rozwarcia δ dyfuzora od prdkoci max c... sp Rys. 6.. Schemat spiralnego kanału zbiorczego o przekroju kołowym i rozkład prdkoci w tym kanale... 3 Rys Rozkład składowych prdkoci obwodowych w przekroju okrelonym ktem spiralnego kanału zbiorczego... 4 Rys Przekrój przez kołowy spiralny kanał zbiorczy przeprowadzony pod dowolnym ktem... 5 Rys. 7.. Pompa monoblokowa jednostopniowa ze spiralnym kanałem zbiorczym ζ Q / w wirniku Rys. 7.. Współczynnik strat hydraulicznych ( ) W W Q WN Rys Współczynnik strat hydraulicznych ζ D (Q/Q N ) kierownic bezłopatkowych pomp Rys Przekrój merydionalny i poprzeczny kierownicy promieniowo-osiowej Rys Współczynnik strat hydraulicznych ζ K (Q/Q N ) kierownic promieniowo-osiowych pomp... 4 Rys Współczynnik strat hydraulicznych ζ PW (Q/Q N ) w płaszczu wodnym pompy Rys Współczynnik strat hydraulicznych ζ KT (Q/Q N ) w krócach tłocznych pomp Rys. 8.. Wirnik pompy Rys. 8.. Kierownica odrodkowa pompy Rys Kierownica dorodkowa pompy Rys Schemat przepływowy analizowanej pompy Rys Proces tworzenia danych dla programów generujcych siatk obliczeniow (generacja geometrii)
10 Rys Typy siatek obliczeniowych stosowanych w programach obliczeniowych CFD... 5 Rys Sposoby podziału tego samego obszaru obliczeniowego na róne podobszary obliczeniowe... 5 Rys Siatka obliczeniowa wirnika... 5 Rys Siatka obliczeniowa kierownicy odrodkowej... 5 Rys Siatka obliczeniowa kierownicy dorodkowej Rys. 8.. Siatki obliczeniowe całego stopnia Rys. 8.. Siatka obliczeniowa całego stopnia w przekroju merydionalnym Rys Objto kontrolna dla równania zachowania masy Rys Objto kontrolna dla prawa zachowania iloci ruchu Rys Przyporzdkowanie zmiennych równania N-S na siatce obliczeniowej Rys Usytuowanie elementarnej objtoci kontrolnej na siatce obliczeniowej do całkowania równa podstawowych Rys Warunki brzegowe do obliczania stopnia pompy Rys Układy odniesienia dla poszczególnych elementów stopnia Rys Warunki brzegowe do obliczania koła wirnikowego... 6 Rys Warunki brzegowe dla elementów nieruchomych pompy Rys. 8.. Schemat stanowiska pomiarowego Rys. 8.. Widok badanej pompy na stanowisku pomiarowym Rys Schemat układu pomiarowego trójstopniowej pompy odrodkowej Rys Kierownica odrodkowa pompy. Punkty odbioru cinienia na ciance od strony ssawnej Rys Kierownica odrodkowa pompy. Połoenie linii sondowania Rys Kierownica dorodkowa pompy. Punkty odbioru cinienia na ciance od strony tłocznej Rys Kierownica dorodkowa pompy. Punkty odbioru cinienia na ciance od strony ssawnej Rys Kierownica dorodkowa pompy. Połoenie linii sondowania Rys Schemat układu pomiaru momentu na wale... 7 Rys Budowa czułki sondy młotkowej dwuotworkowej... 7 Rys Charakterystyka kierunkowa sondy dwuotworkowej Rys Schemat czułki sondy SK5 z oznaczeniem otworków i któw napływu cieczy Rys Składowe wektora prdkoci w przyjtym układzie Rys Pole cinienia statycznego w I stopniu dla wydajnoci nominalnej (model k ε ) Rys Rozkład prdkoci w przekroju poprzecznym wirnika Rys Rozkład prdkoci w przekroju merydionalnym wirnika Rys Rozkład cinienia w przekroju poprzecznym wirnika Rys Prdkoci wzgldne na powierzchni rodkowej kanału wirnika Rys Wektory prdkoci wzgldnej na powierzchni rodkowej kanału wirnika Rys Wektory prdkoci wzgldnej w pobliu tarczy tylnej wirnika Rys Wektory prdkoci wzgldnej w pobliu tarczy przedniej wirnika Rys Profil prdkoci wzgldnej na wylocie z wirnika
11 Rys Pole cinienia statycznego na powierzchni rodkowej kanału wirnika Rys Wektory prdkoci na wlocie do wirnika I stopnia w połoeniu sondy SK5 dla modelu k ε Rys Pole prdkoci na wlocie do wirnika (składowa merydionalna) Rys Składowa obwodowa i merydionalna na powierzchni wlotowej do wirnika I stopnia Rys Wektory prdkoci w połoeniu sondy S9 na wylocie z kierownicy dorodkowej I stopnia dla modelu k ε Rys Rozkład składowej merydionalnej na wylocie z kierownicy dorodkowej Rys Prdko na wylocie z kierownicy dorodkowej Rys Składowa merydionalna i obwodowa na wylocie z kierownicy dorodkowej Rys Obraz linii prdu w przepływie przez I stopie pompy dla modelu k-ε... 9 Rys Przekroje kontrolne do uredniania parametrów lokalnych... 9 Rys Wektory prdkoci na wlocie do wirnika I stopnia w połoeniu sondy SK5 dla wydajnoci nominalnej Rys Rozkłady cinie w kierownicy odrodkowej otrzymane z punktów odbioru cinienia na ciance od strony ssawnej Rys Rozkłady cinie w kierownicy odrodkowej otrzymane w wyniku oblicze i pomiarów Rys Porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze. Widok w kierunku osiowym Rys Porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze. Widok perspektywiczny Rys Rozkłady cinie otrzymane z punktów odbioru cinienia na ciankach kierownicy dorodkowej Rys Rozkłady cinie otrzymane w wyniku oblicze i pomiarów Rys Porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze. Widok w kierunku osiowym Rys Wektory prdkoci zmierzone z kierownicy dorodkowej sond S Rys Porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze. Widok perspektywiczny... 0 Rys Schemat wymiany danych w nachodzcych na siebie ssiadujcych obszarach obliczeniowych Rys Przyporzdkowanie wartoci brzegowych do cianki Rys Odległo od cianki Rys Funkcja intermitencji Rys Funkcja Γ Rys Strefa wewntrzna i zewntrzna dla lepkoci turbulentnej Rys Funkcji dyssypacji w wzłach cianki Rys Schemat blokowy metody oblicze numerycznych... Rys Geometria wirnika... 3 Rys Siatka do oblicze numerycznych przepływu przez wirnik... 3 Rys Wektory prdkoci wzgldnych w pobliu tarczy przedniej wirnika... 4 Rys Wektory prdkoci wzgldnych i rozkład cinienia statycznego na rodkowej powierzchni prdu
12 Rys Wektory prdkoci wzgldnych w przekroju w pobliy tarczy tylnej wirnika... 5 Rys Geometria kierownicy... 6 Rys Siatka do oblicze numerycznych przepływu przez kierownic... 6 Rys Wektory prdkoci wzgldnych w kierownicy pompy7 na powierzchni zewntrznej... 7 Rys Wektory prdkoci wzgldnych w kierownicy pompy na redniej powierzchni prdu... 7 Rys Wektory prdkoci wzgldnych w kierownicy pompy na powierzchni wewntrznej... 8 Rys Schemat stanowiska do bada układów hydraulicznych pompy jednostopniowej pionowej... 9 Rys Charakterystyka manometrycznego cinienia statycznego na wylocie z wirnika p (Q)... Rys Porównanie przyrostu redniego cinienia statycznego w elementach hydraulicznych pompy wyznaczonego na podstawie pomiarów i oblicze 3D... 3 Rys Prdkoci przepływu przez wirnik pompy... 3 Rys Kty zwizane z przepływem cieczy przez wirnik... 4 Rys Straty hydrauliczne wirnika ( p s ) W (Q), ( h s ) W (Q)... 4 Rys Charakterystyka manometrycznego cinienia statycznego na wylocie z kierownicy p 4 (Q)... 5 Rys Prdkoci przepływu przez nieruchome elementy pompy... 6 Rys Straty hydrauliczne ( p s ) K (Q), ( h s ) K (Q) kierownicy odrodkowej... 6 Rys. 9.. Punkty graniczne charakterystyki przepływu H ( Q)... 9 Rys. 9.. Przebiegi krzywych mocy o zrónicowanych kształtach Rys Charakterystyki przepływu - w wersji wysokocinieniowej i wersji niskocinieniowej pompy... 3 Rys Algorytm doboru mocy silnika napdowego w metodzie NCPM Rys Algorytm korelujcy warto Q (wariant pompy max niskocinieniowej) z moc silnika napdowego w metodzie NCPM Rys Algorytm korelujcy warto H z moc silnika napdowego max w metodzie NCPM Rys Charakterystyka przepływu z uwzgldnieniem danych wejciowych... 4 Rys Algorytm etapu I metody projektowania pompy o danym kształcie charakterystyki przepływu Rys Algorytm etapu II metody projektowania pompy o danym kształcie charakterystyki przepływu Rys Współczynnik wzgldnej wysokoci podnoszenia w funkcji rednicy zewntrznej koła wirnikowego D i wzgldnej szerokoci wieca b b = D Rys. 9.. Maksymalna sprawno hydrauliczna pompy w funkcji wzgldnej szerokoci koła wirnikowego b = b D
13 Rys. 9.. Charakterystyka teoretycznej wysokoci podnoszenia H u (Q) oraz rzeczywistej H (Q)... 5 Rys Schemat pompy zatapialnej wraz z oznaczeniem elementów hydraulicznych Rys Współzaleno charakterystyk przepływu przez wirnik H u (Q) z charakterystykami przepływu przez pomp sumarycznych strat h s i strat w poszczególnych elementach układu hydraulicznego Rys Algorytm etapów metody projektowania pomp spełniajcych specjalne wymagania eksploatacyjno-ruchowe z wykorzystaniem numerycznej analizy przepływów trójwymiarowych Rys Warunki opisujce charakterystyk przepływu pompy ψ ( ) Rys Nieprzecialna charakterystyka poboru mocy na wale pompy Rys Współczynik wzgldnej wysokoci podnoszenia ( ) oraz k H b D Rys Charakterystyka przepływu pompy ψ ( ) wirnika ψ u ( ) k H D, charakterystyka przepływu... 7 Rys Charakterystyki przepływu stopnia i pompy wielostopniowej Rys. 9.. Algorytmy etapów metody projektowania stopni odrodkowych pomp wielostopniowych o danej charakterystyce przepływu Rys. 9.. Schemat przepływu cieczy przez stopie i uszczelnienia wewntrzne pompy... 95
14 WYKAZ WANIEJSZYCH OZNACZE A b b B c c ij d D e g H i k K K l m n n ' n q Q P P R R s u w v i i x z α α β β - pole powierzchni kanału hydraulicznego (przepływowego) - szeroko kanału - bezwymiarowa szeroko kanału - wyrónik kształtu wirnika - prdko w ruchu bezwzgldnym - bezwymiarowa prdko w ruchu bezwzgldnym cieczy - tensor deformacji - rednica, funkcja dyssypacji - energia właciwa (jednostkowa) - przyspieszenie ziemskie - wysoko podnoszenia - liczba stopni pompy, kt natarcia cieczy na łopatk - współczynnik metody Kuczewskiego - współczynnik, warto pochodnej funkcji, warto krtu - bezwymiarowa warto krtu (momentu iloci ruchu) - długo - masa - prdko obrotowa - czsto obrotów - kinematyczny wyrónik szybkobienoci - strumie objtoci (wydajno) - moc - bezwymiarowy wskanik mocy - promie - bezwymiarowa warto promienia - grubo łopatki - prdko unoszenia - prdko w ruchu wzgldnym - kontrwariantna składowa prdkoci - współrzdne układu hydraulicznego - liczba łopatek - kt midzy wektorem prdkoci c i u - kt konstrukcyjny łopatki kierownicy łopatkowej - kt midzy wektorami prdkoci u i w cieczy - kt konstrukcyjny łopatki wirnika 3
15 - przyrost (przed symbolem wartoci) - bezwymiarowy wskanik wydajnoci - wyrónik wydajnoci wirnika, bezwymiarowy wskanik przepływu przez wirnik γ - kt nachylenia stycznej do charakterystyki, kt nachylenia cianki η - sprawno λ - współczynnik tarcia µ - współczynnik zmniejszenia przekroju hydraulicznego (przepływowego) przez łopatki, współczynnik polizgu, lepko θ - ktowa współrzdna biegunowa ρ - gsto cieczy τ - wypełnienie palisady łopatek ω - prdko ktowa ζ - współczynnik strat hydraulicznych ϑ - kt odchylenia strugi od kierunku łopatki na spływie z palisady ϑ - kt odchylenia strugi od kierunku łopatki na wylocie z wirnika c, u, w - bezwymiarowy wskanik prdkoci c, u, w τ ij τ τ c ψ ψ u - wypełnienie (gsto palisady łopatek) - tensor napre - bezwymiarowy wskanik składowej redniej prdkoci obwodowej - bezwymiarowy wyrónik: cinienia, wysokoci podnoszenia, pracy właciwej pompy, pracy jednostkowej pompy, współczynnik w poprawce Pfleiderera, bezwymiarowy wskanik strat hydraulicznych - bezwymiarowy wyrónik: cinienia, teoretycznej wysokoci podnoszenia, pracy właciwej (jednostkowej) wirnika, bezwymiarowy wskanik napdu, bezwymiarowy wskanik spitrzenia równowanego energii przekazanej cieczy INDEKSY e h m M max min - efektywny (uyteczny) - hydrauliczny - merydionalny, mechaniczny - punkt maksymalnego poboru mocy - maksymalny - minimalny 4
16 N - nominalny u - obwodowy, teoretyczny UM - uszczelnienie midzystopniowe UP - uszczelnienie przednie UT - uszczelnienie tylne oo - otwory odciajce v - objtociowy 0 - wlot do wirnika - wlot do wieca łopatkowego wirnika - wylot z wirnika 3 - wlot do kierownicy łopatkowej 4 - wylot z kierownicy 5 - wylot z płaszcza wodnego 5
17 6
18 PRZEDMOWA Problem dostosowania pomp do warunków eksploatacyjnych oraz problem ich sprawnoci ma szczególne znaczenie ze wzgldu na szerokie i rónorodne zastosowanie tego typu maszyn, a w rezultacie due zaangaowanie energii wykorzystywanej do ich napdu. Tematem monografii s pompy spełniajce specjalne wymagania ruchowe, czyli pompy przeznaczone do współpracy z instalacj (układem pompowym) o zmiennej charakterystyce oporu hydraulicznego przy tej samej charakterystyce przepływu pompy. Warunki ruchowe pracy mog dotyczy realizacji przez pomp: nieprzecialnej charakterystyki poboru mocy przy jednoczesnym zagwarantowaniu danych współrzdnych punktów granicznych charakterystyki przepływu H (Q), tzn. H max dla Q = 0 i Q max dla H = 0, danego kształtu charakterystyki przepływu H (Q), jednoczenie, danego kształtu charakterystyki przepływu H (Q) i nieprzecialnej charakterystyki poboru mocy P (Q). W przeciwiestwie do szeroko omówionych w literaturze pomp przeznaczonych do współpracy z instalacj w punkcie nominalnym, metody konstruowania pomp współpracujcych z instalacj o dowolnej charakterystyce nie doczekały si spójnych opracowa. Nieliczne czstkowe prace dotyczce tych metod konstruowania pomp uwzgldnione zostały w monografii. W kolejnych rozdziałach omówiono: warunki pracy tych pomp, dowiadczalne i numeryczne badania struktury przepływu w ich kanałach hydraulicznych, stoiska do pomiaru parametrów bilansowych i lokalnych (prdkoci i cinie), opracowane dotychczas metody projektowania. Monografia stanowi podsumowanie wieloletnich prac wykonywanych w Zakładzie Maszyn Wodnych i Mechaniki Płynów Instytutu Maszyn Przepływowych Politechniki Łódzkiej pod kierunkiem autora, dotyczcych wymienionej problematyki. Prace te mogły by realizowane dziki poparciu finansowemu Komitetu Bada Naukowych w ramach projektów badawczych własnych [7, 8, 9,, 44, 59, 60] wykonywanych w Instytucie Maszyn Przepływowych Politechniki Łódzkiej. Wykorzystane zostały równie rezultaty wieloletniej współpracy naukowobadawczej z krajowymi producentami pomp. Szczególnie gorce podzikowania składam opiniodawcom tej monografii: prof. dr. hab. in. Waldemarowi Jdralowi oraz dr. hab. in. Andrzejowi Korczakowi, prof. Pl za trud włoony w opracowanie recenzji monografii. 7
19 Wyrazy podzikowania kieruj pod adresem pracowników Zakładu Maszyn Wodnych i Mechaniki Płynów w osobach: dr. in. Stefana Najdeckiego, dr. in. Adama Papierskiego, dr. in. Jerzego Staniszewskiego. Chciałbym podzikowa moim doktorantom w osobach: mgr. in. Radosława Kunickiego oraz mgr. in. Mariusza Susika za wkład pracy wniesiony w opracowanie strony technicznej monografii. 8
20 . WSTP Pompa jest to maszyna, w której nastpuje przekazanie energii od wału silnika napdowego do przepływajcej przez ni cieczy. Dla przekazania energii pompa wyposaona jest w element ruchomy o ruchu obrotowym (wirnik) lub posuwisto-zwrotnym (tłok, membrana, nurnik itp.). Pozostałe urzdzenia nieruchome układu hydraulicznego słu do zamiany energii cieczy przepływajcej przez pomp, np. z kinetycznej na potencjaln. Podstawowymi parametrami pomp s: m 3 m 3 dm 3 wydajno Q mierzona zwykle w, h,, s min N przyrost cinienia p m pomidzy krócem ssawnym i tłocznym lub p wysoko podnoszenia H = [ m ] odpowiadajca przyrostowi cinienia, ρ g obr prdko obrotowa pompy n mierzona zwykle w min, pobór mocy przez pomp P [ kw ] mierzony na wale pompy, sprawno pompy, któr okrela wzór: g H Q η = ρ (.) P gdzie: ρ - gsto cieczy przepływajcego przez pomp. Podział przenoników cieczy przedstawiono na rys.. [65]. Pompy s jedn z grup maszyn i urzdze wród przenoników cieczy. Rys... Podział przenoników cieczy [65] 9
21 Zadaniem przenoników jest transport cieczy oraz mieszanin cieczy z tak zwanego zbiornika dolnego (zamknitego lub otwartego) do górnego (zamknitego lub otwartego). Ze wzgldu na róne poziomy energetyczne zbiornika dolnego i górnego iloci transportowanej cieczy, przenoniki charakteryzuj si du rónorodnoci sposobów działania i rozwiza konstrukcyjnych układów hydraulicznych. Podział pomp przedstawiono w normie [50] dotyczcej przenoników cieczy (rys..). 0 Rys... Podział pomp na rodziny i grupy [50, 65]
22 Pompy wirowe nale do jednych z najbardziej rozpowszechnionych maszyn. Pod wzgldem liczby wytwarzanych maszyn pompy znajduj si na drugim miejscu po silnikach elektrycznych. Ocenia si, e pomp wirowych jest około 0 razy wicej ni pomp wyporowych. Rónica w działaniu pomp wyporowych i wirowych polega na innym charakterze przepływu przez ich układy hydrauliczne. W wikszoci pomp wyporowych, czsto nazywanych objtociowymi, wyróni mona podobne cykle pracy jak w silniku spalinowym: suw ssawny, w trakcie którego nastpuje napełnianie ciecz komory roboczej (np. cylindra), po napełnieniu komory zawór ssawny zamyka si przy zamknitym zaworze tłocznym; ciecz znajdujca si w komorze odcita jest wówczas od króca ssawnego i tłocznego, przemieszczajcy si organ roboczy (np. tłok, nurnik) powoduje wzrost ci- nienia, zamknicie zaworu ssawnego i otworzenie zaworu tłocznego, przez który usuwana jest ciecz z komory. Charakterystyczn cech przepływu w tych pompach s pulsacje wydajnoci i cinie w pompie i układzie pompowym. Charakter przepływu przez pompy wyporowe decyduje równie o kształcie charakterystyki przepływowej (rys..3). Rys..3. Charakterystyka przepływu H (Q) pompy wyporowej
23 Z rys..3 łatwo zauway, e przy stałej prdkoci obrotowej wydajno pompy prawie nie ulega zmianie. Z tego wzgldu pompy te nie s zaliczane do pomp spełniajcych specjalne wymagania ruchowe, których główn cech jest praca w szerokim zakresie zmian wydajnoci przy stałych obrotach wału napdowego. Warunek ten spełniaj pompy wirowe nazywane te przepływowymi. Pompy te w odrónieniu od wyporowych charakteryzuj si cigłym przepływem w układzie hydraulicznym oraz kształtem charakterystyki przepływu pokazanym na rys..4. Parametry H i Q odpowiadajce maksymalnej sprawno- ci η N nazywane s nominalnymi i zostały oznaczone przez H N i Q N. Rys..4. Charakterystyka przepływu pompy wirowej Parametry punktu nominalnego, równego z załoenia punktowi optymalnemu, w którym η = ηmax, słu miedzy innymi do okrelania tzw. kinematycznego wyrónika szybkobienoci opisanego wzorem: n q Q = n (.) H N 3/ 4 N gdzie: obr n - prdko obrotowa zespołu wirujcego min, m 3 Q N - wydajno nominalna, s m. H - nominalna wysoko podnoszenia [ ] N
24 Pompy wyporowe posiadaj wyróniki szybkobienoci poniej 5. Pompy wirowe charakteryzuj si wyrónikiem szybkobienoci od około 5 (pompy kreniowe) i od 0 (wolnobiene pompy odrodkowe) do n > 330 (szybkobiene pompy osiowe). Wraz z wyrónikiem szybkobienoci zmienia si kształt wirników i charakterystyki (rys..5 i.6). q Rys..5. Profile jednostrumieniowych wirników pomp wirowych [39] Według [7] 0-30% wytwarzanej w poszczególnych krajach energii elektrycznej zuywane jest do napdu pomp. Naley przy tym równie wspomnie o innych silnikach napdowych pomp, takich jak turbiny parowe, spalinowe, powietrzne, silniki spalinowe i hydrauliczne, których udział w mocach napdowych pomp jest mniejszy, ale te znaczcy. 3

25 Rys..6. Kształty wirników w zalenoci od wartoci wyrónika szybkobienoci [7, 39] 4
26 W zwizku z tym naley dy do tego, aby koszty eksploatacji pomp były w danych warunkach jak najmniejsze. Oznacza to, e maszyny te powinny si cechowa: du trwałoci i niezawodnoci działania, odpowiednim przebiegiem charakterystyk przepływu H (Q), poboru mocy P (Q), moliwie najwiksz sprawnoci całkowit η (Q) oraz minimaln z moliwych rozporzdzaln nadwyk antykawitacyjn NPSHr (Q). Podstawow zalet pomp wirowych jest zdolno do samoczynnego przystosowywania si do zmiennych warunków pracy. Problem dostosowania charakterystyk pomp do warunków eksploatacyjnych jest szczególnie istotny w przypadku stosowania do ich napdu silników elektrycznych o nieregulowanych obrotach. Rónorodno zastosowania wymaga od pomp pracy w rónych warunkach, co z kolei wymusza zmiany zarówno ich parametrów hydraulicznych, energetycznych, jak i konstrukcyjnych. Wyrónia si dwa podstawowe rodzaje ich zastosowa: współpraca pomp z instalacj o stałych parametrach pracy charakteryzujcych si nominaln wysokoci podnoszenia Q, H N i nominaln wydajnoci N współpraca pomp z dowoln instalacj charakteryzujc si zmiennymi parametrami pracy H i Q. Tematyka monografii dotyczy pomp przeznaczonych do współpracy z układami pompowymi w szerokim zakresie zmian wydajnoci. Pompy te powinny realizowa dane kształty charakterystyki przepływu H (Q) lub posiada nieprzecialn charakterystyk poboru mocy. W szczególnych przypadkach powinny jednoczenie realizowa dany kształt charakterystyki przepływowej oraz nieprzecialn charakterystyk poboru mocy. Wymagania te mog dotyczy pomp jedno- lub wielostopniowych pomp. W monografii omówione zostały metody opracowane w Instytucie Maszyn Przepływowych Politechniki Łódzkiej: projektowania pomp promieniowych o nieprzecialnych charakterystykach poboru mocy [3], projektowania pomp promieniowych o danym kształcie charakterystyki przepływowej [6], projektowania pomp, spełniajcych specjalne wymagania eksploatacyjnoruchowe z wykorzystaniem numerycznej analizy przepływów trójwymiarowych [], projektowania stopni odrodkowych pomp wielostopniowych o danej charakterystyce przepływu [59]. Wspóln cech wymienionych metod jest to, e danymi wejciowymi do oblicze s przebiegi charakterystyk przepływu H (Q) i poboru mocy przez pomp P (Q). 5
27 . WSPÓŁPRACA POMPY Z UKŁADEM POMPOWYM.. Charakterystyki pomp wirowych Zachowanie si pomp w rónych warunkach pracy jest opisane za pomoc zespołu krzywych (przy odpowiednich osiach współrzdnych), które okrelaj wzajemn współzaleno pomidzy tzw. parametrami stanu ruchu. Sporód nich zasadnicz rol pełni krzywe okrelajce charakterystyk przepływu H (Q), charakterystyk poboru mocy na wale P (Q) oraz charakterystyk sprawnoci całkowitej η (Q), odnoszce si do stałych obrotów pompy n = const (rys..). Charakterystyki te mog by przedstawione we współrzdnych wymiarowych i bezwymiarowych. Zwizki midzy parametrami wymiarowymi oraz bezwymiarowymi opisuj ponisze zalenoci: ψ - bezwymiarowy wskanik wysokoci podnoszenia H, przyrostu cinienia p lub energii właciwej Y g H ψ = u p Y = = = ρ u u g H p Y ( π D n' ) ρ ( π D n' ) ( π D n ) ' - bezwymiarowy wskanik wydajnoci Q = = (.) Q Q = = 3 (.) A u π D b ' n P - bezwymiarowy wskanik mocy P P = P P = ρ 3 ρ (.3) A u π D b n' gdzie: u - prdko obwodowa na rednicy zewntrznej wirnika, u = π D ' (.4) n gdzie: D - rednica zewntrzna wirnika, n ' - czsto obrotów wirnika, A - powierzchnia przekroju wylotowego z wirnika, 6 Spotyka si okrelenia: instalacja pompowa, rurocig. Do układu pompowego jest te niekiedy zaliczana pompa.
28 A D b = π (.5) b - wzgldna szeroko wylotu z wirnika w przekroju merydionalnym, b b µ = (.6) D µ - współczynnik zwizany z przesłoniciem przekroju wylotowego wirnika przez łopatki, z s µ = π D sin β (.7) gdzie: z - liczba łopatek wirnika, s - wylotowa grubo łopatki, Na rys.. przedstawione zostały podstawowe charakterystyki przepływowo-energetyczne tej samej pompy wirowej w układzie wymiarowym i bezwymiarowym. Rys... Charakterystyki odrodkowej pompy wirowej w układzie: a) wymiarowym, b) bezwymiarowym Rzeczywiste charakterystyki pomp wyznacza si głównie na podstawie pomiarów gotowych maszyn lub ich prototypów. W ostatnich latach, w zwizku z rozwojem nowoczesnych metod oblicze [8,,, 46, 59, 68] coraz czciej wyznacza si charakterystyki (przepływu, poboru mocy przez pomp) na etapie projektowania pomp. Charakterystyki przepływu mona podzieli w zalenoci od ich kształtu wyraajcego wane własnoci pomp. Charakterystyka przepływu H (Q) moe 7
29 by stateczna lub niestateczna (rys..), stroma lub płaska (rys..3). Charakterystyka poboru mocy moe by przecialna lub nieprzecialna (rys..4). Rys... Charakterystyka przepływu:a) stateczna, b) niestateczna [5, 7] Rys..3. Charakterystyka przepływu pompy: a) stroma, b) płaska 8
30 Rys..4. Kształty charakterystyk poboru mocy przez pomp: a) nieprzecialna, b) przecialna [5, 7] Na rys..4 zostały równie naniesione poziomy mocy elektrycznych silników napdowych pomp oraz wydajnoci pomp Q M, M dla maksymalnego poboru mocy... Charakterystyka oporu hydraulicznego układu pompowego Układ pompowy jest to zespół elementów, tworzcych połczenie ródła cieczy z odbiornikiem z uwzgldnieniem potrzebnych zmian kierunku przepływu, parametrów stanu cieczy oraz ich pomiaru i regulacji. Do układu pompowego nie zalicza si pompy, stanowicej ródło energii dostarczanej cieczy [54]. Podstawowe elementy układu pompowego to: zbiornik dolny i górny, odcinki proste rurocigu, łuki i kolana rurowe, kierownice i prostownice, zwki pomiarowe, przepływomierze, siatki, filtry, kosze ssawne, zasuwy, zawory, przepustnice, kształtki rurowe zmieniajce wielko lub kształt przekroju przepływowego. Schemat układu pompowego, na którym zaznaczono jego parametry geometryczne, dynamiczne i kinematyczne przedstawiono na rys..5. 9
31 Rys..5. Schemat układu pompowego ssawno-tłoczcego Parametrami geometrycznymi s: geometryczna wysoko ssania układu pompowego. H S jest to odległo rodkowego punktu przekroju wlotowego króca ssawnego pompy od zwierciadła cieczy w zbiorniku dolnym. W przypadku układu z napływem (rys..6) H S przyjmuje warto ujemn w równaniu charakterystyki oporu hydraulicznego układu pompowego, Rys..6. Schemat układu pompowego z napływem W klasycznych pozycjach literatury [5, 8, 39] s stosowane oznaczenia wyso- H, zs H, zt H (w przypadku napływu) zamiast zn H, s H. T koci 30
32 geometryczna wysoko tłoczenia układu pompowego. H T jest to odległo rodka króca tłocznego pompy od lustra cieczy w zbiorniku górnym (lub rodka przekroju wypływu swobodnego z rurocigu tłocznego),, H jest rónic poziomów połoenia rodka przekroju wlotu do króca ssawnego i rodka przekroju wylotowego z króca tłocznego pompy, geometryczna wysoko podnoszenia układu pompowego H g jest sum geometrycznej wysokoci ssania i tłoczenia oraz rónicy poziomu połoenia rodków przekrojów króców tłocznego i ssawnego pompy. H g HT + H S + H, = (.8) W przypadku układu pompowego z napływem (rys..6) zaleno (.8) przyjmuje posta: H g H T H S + H, = (.9) H g mona równie zapisa jako rónic połoenia luster cieczy w zbiorniku górnym i dolnym. Pozostałe parametry geometryczne układu pompowego stanowi: długoci rurocigów prostoosiowych i ich rednice, wymiary charakterystyczne (konstrukcyjne) łuków, kolan, kształtek rurowych zmieniajcych wielko lub kształt przekroju przepływowego oraz elementów specjalnych (zasuw, zaworów, przepustnic, zwek pomiarowych itp.). Parametry statyczne: geometryczna wysoko podnoszenia H g, cinienie p d w zbiorniku dolnym oraz cinienie p g w zbiorniku górnym s to cinienia gazu nad lustrem cieczy. Dla zbiorników otwartych lub wypływu swobodnego do przestrzeni otwartej cinienia te s równe cinieniu otoczenia, np. cinieniu atmosferycznemu (barometrycznemu), Parametry dynamiczne: cinienie p s - rednie cinienie w krócu ssawnym, cinienie p t - rednie cinienie w krócu tłocznym. d Parametry kinematyczne układu pompowego: c, c g s to rednie prdkoci przepływu cieczy w zbiorniku odpowiednio dolnym i górnym. Dla układów zawierajcych zbiorniki o duej pojemnoci przyjmuje si, e prdkoci te wynosz zero. W takich przypadkach równie ich napełnianie lub oprónianie odbywa si w takim tempie, e prdkoci te 3
33 s w tym przypadku prdkoci podwyszania lub obniania poziomu lustra cieczy mona praktycznie pomin. W przypadku swobodnego wypływu cieczy z rurocigu lub dopływu (odpływu) cieczy do układu pompowego korytem, kanałem itp. naley uwzgldnia prdkoci: c > 0 c > 0 (.0) d g c, c t s to rednie prdkoci przepływu cieczy w przekrojach wlotowym króca ssawnego i wylotowym króca tłocznego pompy, czsto odpowiadaj one prdkoci przepływu cieczy w rurocigach układu pompowego po stronie ssania i tłoczenia. W przypadku zrónicowania rednic rurocigów, prdkoci przepływu cieczy w poszczególnych odcinkach mog by róne. Głównymi parametrami pracy pompy i układu pompowego s: wydajno Q. W przypadku, w którym układ pompowy pobiera ciecz z jednego ródła i dostarcza do jednego odbiory, to w kadym miejscu układu jest ta sama wydajno, któr okrela zaleno (.): Q = A c (.) gdzie: A - pole przekroju kanału przepływowego, c - rednia prdko przepływu w kanale. przyrost cinienia w pompie p p. Pompa, przetłaczajc ciecz przez układ pompowy o wydajnoci Q musi pokona:. rónic cinie panujcych w zbiorniku górnym i dolnym: p = p g p d (.). cinienie wynikajce z rónicy poziomów luster cieczy w zbiorniku górnym i dolnym: p = ρ (.3) zb gh g 3. rónic cinie dynamicznych zwizanych z prdkociami cieczy c d, c g w zbiorniku odpowiednio dolnym i górnym: ( p d ) g ( p d ) d p = (.4) gdzie: ( p ) d g ρcg = (.5) 3
34 ( p ) d d ρcd = (.6) 4. straty hydrauliczne, czyli cinienia zwizane z przepływem cieczy lepkiej w układzie pompowym p. str W zwizku z powyszym wymagany przyrost cinienia w pompie la zaleno: p zb d str p p okre- p = p + p + p + p (.7) Poniewa cinienie zaley od gstoci transportowanej cieczy ρ, to bardziej uniwersalnym parametrem jest wysoko odpowiadajca temu cinieniu: p p ρg = H up = p g p ρg d ρgh + ρg g c + g c g d p + ρg str (.8) Uwzgldniajc zwizki (.8) lub (.9) oraz (.4), (.5) w równaniu (.8), otrzymuje si zaleno: Najczciej: ( c c ) pg pd g d H up = + HT ± H S + H + + H ρg g str (.9) c c = 0 (.0) g = d równanie (.9) przyjmuje wówczas posta: pg pd H up = + H T ± H S + H + H ρg str (.) Oznaczajc sum czterech pierwszych składników w równaniu (.) przez K, mona zapisa: gdzie: K p H = K + (.) up H str p g d = + H T ± H S + H ρg (.3) Zaleno (.3) jest nazywana statyczn wysokoci podnoszenia układu pompowego. Dla danego układu w warunkach ustabilizowanej pracy jest to wielko stała niezalena od wydajnoci pompy. 33
35 Wysoko straty przepływu H str, zwana czsto wysokoci oporu hydraulicznego, zwizana jest z lepkoci cieczy transportowanej w układzie pompowym. Całkowita wysoko strat jest sum strat zachodzcych wewntrz płyncej cieczy oraz strat spowodowanych tarciem cieczy o cianki rurocigu prostoosiowego i strat miejscowych wywołanych tzw. elementami specjalnymi (kolana, zawory, dyfuzory, gwałtowne zwikszenie i zmniejszenie przekroju przepływowego, trójniki, kosz ssawny, zwki miernicze, wodomierze itp.): gdzie: H rp H = H + H (.4) str rp spec - wysoko strat w rurocigu prostoosiowym, H spec - wysoko strat w elementach specjalnych. Według Darcy ego wysoko strat przepływu w prostoosiowym przewodzie o przekroju kołowym mona okreli z zalenoci: gdzie: c l c H rp = k = λ (.5) g d g λ - bezwymiarowy współczynnik oporu tarcia zaleny od liczby Reynoldsa Re i chropowatoci wzgldnej przewodu, l - suma długo kanałów prostoosiowych układu pompowego [ ] d - rednica kanału przepływowego [ m ], m c - rednia prdko przepływu s, m g - przyspieszenie ziemskie s. Na odcitej (rys..7) oznaczone s wartoci liczby Reynoldsa Re. Liczba Reynoldsa Re jest zwykle definiowana zalenoci: m, cd Re = h (.6) ν gdzie: c - prdko cieczy w kanale przepływowym, Dh - rednica hydrauliczna kanału przepływowego, ν - lepko kinematyczna. Najczciej do okrelenia λ wykorzystuje si wykres L. Moodego (rys..7). 34
![Rys..7. Współczynnik strat λ w rurze kołowej wg L. Mood ego dla chropowatoci naturalnych [54] Wysoko strat w elementach specjalnych okrela si na podstawie nastpujcej formuły: c H spec = ξ (.](/docs-images/67/57028791/images/36-0.jpg "7) g gdzie: ξ - bezwymiarowy współczynnik oporu hydraulicznego elementu specjalnego bdcy funkcj rodzaju elementu.")
36 Rys..7. Współczynnik strat λ w rurze kołowej wg L. Mood ego dla chropowatoci naturalnych [54] Wysoko strat w elementach specjalnych okrela si na podstawie nastpujcej formuły: c H spec = ξ (.7) g gdzie: ξ - bezwymiarowy współczynnik oporu hydraulicznego elementu specjalnego bdcy funkcj rodzaju elementu. Wartoci bezwymiarowych współczynników ξ podawane s w poradnikach i normach przedmiotowych. Przykład zmian wartoci współczynnika bezwymiarowego ξ dla gwałtownego zwikszenia przekroju (rys..8) podano w tabeli T-. Tabela T- f F 0 0, 0, 0,3 0,4 0,5 0,6 0,7 0,8 0,9 ξ 0,8 0,64 0,49 0,36 0,5 0,6 0,09 0,04 0,0 0 Rys..8. Gwałtowana zmiana przekrojów rurocigu układu pompowego 35
37 W nawizaniu do rys..8 wzór na wysoko straty miejscowej przyjmuje posta: c H spec = ξ (.8) g Uwzgldniajc we wzorze (.4) zalenoci (.5) oraz (.7) dla n elementów specjalnych, zaleno na całkowit wysoko strat przepływu w układzie pompowym przyjmuje posta: H str l c ci = λ ξi (.9) d g g i + = n i= gdzie: n - liczba elementów specjalnych, i - numer elementu specjalnego. Podstawiajc do równania (.) zaleno (.9), otrzymuje si wzór: H up = K uwzgldniajc we wzorze (.30) zalenoci: wzór (.30) przyjmuje posta: H l c ci + λ ξi (.30) d g g i + = n i= Q c = (.3) A Q c i = (.3) A l i i n up = K + + Q = λ ξi da g i ga. (.33) = i Dla zrealizowanego układu pompowego zaleno zawarta w nawiasie równania (.33) jest wielkoci stał: K i + = n i= l = λ ξ i (.34) da g ga Poniewa w praktyce wystpuj najczciej przepływy turbulentne, w przypadku których współczynniki oporu hydraulicznego prawie nie zale od liczby Reynoldsa (rys..7), mona z niewielkim błdem przyj, e krzywa opisana równaniem (.33) bdzie miała kształt paraboli. i 36
38 W zwizku z powyszym posta ogólna równania charakterystyki oporu hydraulicznego układu pompowego wyrazi si wzorem: H up = K + (.35) K Q Zaleno K Q nazywa si dynamiczn charakterystyk układu pompowego. Charakterystyk oporu hydraulicznego w układzie wymiarowym i bezwymiarowym przedstawiono na rys..9. Rys..9. Charakterystyka oporu hydraulicznego układu pompowego Punkt współpracy pompy z układem pompowym ley na przeciciu charakterystyki pompy z charakterystyk układu pompowego (rys..0). Rys..0. Współpraca pompy z układem pompowym 37
39 Zmiana połoenia punktu współpracy pompy z układem pompowym przy niezmienionej charakterystyce przepływu pompy H ( Q) moe by spowodowana: zmian statycznej charakterystyki podnoszenia układu układu pompowego - K, zmian dynamicznej charakterystyki oporu hydraulicznego układu pompowego - K Q. Zmiana statycznej wysokoci podnoszenia moe by wywołana: zmianami poziomów cieczy w zbiorniku górnym i/lub dolnym (w przypadku zbiorników otwartych), zmianami cinie w zbiornikach górnym i/lub dolnym odpowiednio p g, p d. Zmian połoenia charakterystyki oporu hydraulicznego układu pompowego spowodowan zmian statycznej wysokoci podnoszenia układu przedstawiono na rys... Rys... Zmiana połoenia punktu pracy wskutek zmiany statycznej wysokoci podnoszenia układu pompowego Przykładem zmian geometrycznych wysokoci podnoszenia mog by układy pompowe przenonych pomp zainstalowanych pod powierzchni cieczy, nazywanych zatapialnymi. W przypadku tych układów pompowych najczciej nie wystpuje rurocig ssawny, a tylko rurocig tłoczny, który jest elementem elastycznym pozbawionym urzdze dławicych. 38
40 Najczciej stosowanym rozwizaniem przenonych pomp zatapialnych s konstrukcje monoblokowe jednostopniowe. Monoblokowe pompy jednostopniowe napdzane silnikiem elektrycznym stanowi liczn grup maszyn przystosowanych do pracy w rónych warunkach zainstalowania. Nazywane s one czsto przenonymi, mimo i znaczna ich liczba way powyej kilkuset kilogramów. Praca tych pomp charakteryzuje si szerokim zakresem zmian wydajnoci. To z kolei wymaga stosowania: elastycznego rurocigu tłocznego podłczanego do krócica tłocznego pompy z reguły bez zaworów regulacyjnych, do napdu pomp silników elektrycznych o nieregulowanych prdkociach obrotowych, w przypadku pomp przewidywanych do pracy w zanurzeniu wymagane s hermetyczne elektryczne silniki napdowe oddzielone komorami olejowymi od czci cieczowej. Graficzn ilustracj granicznych przypadków pracy tych pomp przedstawiono na rys... Rys... Schemat granicznych wariantów współpracy pompy z rónymi układami pompowymi W przypadku a (rys..) wymagana wysoko podnoszenia pompy zwizana bdzie głównie z rónic połoenia zwierciadeł cieczy w zbiorniku dolnym i górnym UP. W przypadku b (rys..) wymagana wysoko podnoszenia pompy zwizana jest z stratami hydraulicznymi przepływu UP. Na rys..3 przedstawione zostały punkty współpracy pompy z układami pompowymi UP i UP. 39
41 Rys..3. Współpraca pompy z układami pompowymi o zrónicowanych charakterystykach oporu hydraulicznego Wymagania dotyczce parametrów przepływowo-energetycznych pomp przenonych oraz metody projektowania zostały omówione w kolejnych rozdziałach. Zmiana dynamicznej charakterystyki oporu hydraulicznego układu pompowego (rys..4) w trakcie jego eksploatacji moe by spowodowana: dławieniem przepływu w rurocigu tłocznym. Jeeli w układzie pompowym zainstalowany jest element nastawny (przepustnica, zawór, zasuwa), to istnieje moliwo zmiany jego współczynnika strat od ξ dla całkowitego otwarcia do ξ z max dla granicznego zwenia przekroju przepływowego. Całkowite zamknicie zaworu powoduje wzrost współczynnika strat do wartoci ξ z max = +. W zwizku z tym, e współczynnik strat zaworu ξ z jest składnikiem współczynnika strat całego układu pompowego, przymknicie zaworu i wzrost jego współczynnika strat powoduje wzrost współczynnika strat całego układu, to jest wzrost stromoci charakterystyki oporu hydraulicznego, osadzaniem si kamienia na ciankach rurocigu, co powoduje wzrost współczynnika λ wskutek wzrostu chropowatoci cian oraz zmniejszenie si pola przekroju kanału hydraulicznego d. Łatwo zauway (rys..4), e zdławienie przepływu oraz zwikszenie chropowatoci rurocigu, jak i zmniejszenie rednicy powoduj zwikszenie stromoci charakterystyki dynamicznej oporu hydraulicznego układu pompowego. W rzeczywistych układach pompowych moe zachodzi jednoczenie zmiana charakterystyki statycznej i dynamicznej układu pompowego (rys..5). zmim 40
42 Rys..4. Zmiana połoenia punktu pracy pompy wskutek zmiany dynamicznej charakterystyki układu pompowego Rys..5. Zmiana połoenia punktu pracy pompy wskutek jednoczesnej zmiany statycznej i dynamicznej charakterystyki oporu hydraulicznego układu pompowego W grupie pomp zainstalowanych na stałych fundamentach wyrónia si nastpujce układy pompowe: 4
43 ssawne, w których pompa zainstalowana jest ponad zwierciadłem zasysanej cieczy ze zbiornika dolnego (rys..6), Rys..6. Układ pompowy ssawny [3] tłoczce (z napływem), w których pompa znajduje si na poziomie poniej lustra cieczy w zbiorniku dolnym i tłoczy ciecz na wymagan wysoko do zbiornika górnego (rys..6), ssawno-tłoczce, w których pompa zainstalowana jest nad lustrem zasysanej cieczy z umownie nazywanego zbiornika dolnego i tłoczy ciecz na wymagan wysoko do zbiornika górnego (rys..7), 4 Rys..7. Układ pompowy ssawno-tłoczcy [3]
44 o obiegu zamknitym, tzw. obiegowe, w których pompa pokonuje tylko opory hydrauliczne przepływu instalacji (rys..8), Rys..8. Układ pompowy o obiegu zamknitym [3] wspomagajce przepływ (rys..9), w których pompa zwiksza natenie przepływu cieczy w stosunku do natenia spowodowanego przepływem grawitacyjnym. Rys..9. Układ pompowy z wspomaganiem przepływu [3] Przedstawione na rys. rys..6,.7,.8,.9 układy pompowe dotycz instalacji stacjonarnych, w których na rurocigu tłocznym zawory słu nie tylko do odcinania pompy od rurocigu tłocznego, ale równie do regulacji pompy w szerokim zakresie zmian wydajnoci (rys..3). Obecnie, w zwizku ze zmian wymaga dotyczcych iloci wytwarzanego w instalacjach technologicznych produktu (elektrownia prd i ciepło, petrochemia benzyna i inne ropopochodne itd.), zachodzi konieczno czstego dostosowania si pomp do zmiennych warunków. Zwykle bardzo precyzyjnie okrela si, jakie wysokoci podnoszenia powinny by realizowane dla zadanych wydajnoci. Problem ten obecnie dotyczy równie układów pompowych z zainstalowanymi pompami dotychczas pracujcymi w otoczeniu punktu nominalnego. Wymaga to od konstruktorów projektowania układów hydraulicznych pomp realizujcych: 43
45 nieprzecialne charakterystyki poboru mocy, dane kształty charakterystyk przepływowych, jednoczenie dane kształty charakterystyk przepływu oraz nieprzecialne charakterystyki poboru mocy przez pompy. Powysze stwierdzenia uzasadniaj podjcie tej tematyki w monografii. 44
46 3. JEDNOWYMIAROWY MODEL W POMPIE ODRODKOWEJ Przepływ ciecz przez elementy ruchome i nieruchome układu hydraulicznego pompy ma charakter złoony, klasyfikowany w mechanice płynów jako trójwymiarowy nieustalony przepływ turbulentny cieczy lepkiej i nieciliwej. Metody numeryczne obliczania przepływów trójwymiarowych umoliwiaj wyznaczenie cinie i prdkoci lokalnych cieczy. Numeryczne i dowiadczalne badania struktury przepływu omówione zostały w rozdziale 8. Metody numeryczne na obecnym etapie rozwoju nie umoliwiaj wyznaczenia głównych wymiarów geometrycznych kanałów hydraulicznych pomp. Do wyznaczenia głównych wymiarów wykorzystuje si metody oparte na uproszczonych modelach przepływu dwuwymiarowych lub najczciej jednowymiarowych z zastosowaniem współczynników empirycznych. Jednowymiarowy model przepływu jest najdalej posunitym uproszczeniem przepływu rzeczywistego. W modelu tym zakłada si, e turbulentny przepływ trójwymiarowy moe by zastpiony przepływem osiowo-symetrycznym, w którym profil prdkoci w płaszczynie przechodzcej przez o obrotu maszyny, zwanej merydionaln, jest wyrównany. Załoenie to oznacza, e przepływ w dowolnym kanale hydraulicznym moe by reprezentowany przez jedn linie prdu, a parametry przepływu zmieniaj si wzdłu osi pokrywajcej si z t lini. Linia ta nazywana jest rodkow lini prdu lub redni zastpcz strug. Dla wyznaczenia rodkowej linii prdu zakłada si, e: dzieli ona strumie przepływajcy w kanale hydraulicznym na dwie strugi o jednakowych wydajnociach, prdko cieczy w płaszczynie merydionalnej jest stała wzdłu ortogonalnych do linii prdu. Graficzn ilustracj konstrukcji rodkowej linii prdu na przykładzie wirnika pompy odrodkowej przedstawiono na rys. 3.. Ze wzgldu na załoenie e rodkowa linia prdu dzieli przepływ na dwie Q strugi o jednakowych wydajnociach musi by spełniona zaleno (3.), w kadym przekroju ortogonalnym do redniej zastpczej strugi: A ' x i c m = A '' x i c m π D b c = πd ' x ' x m '' x π D b c = πd ' x i ' x i m i '' x i b b '' x '' x i c c m m i (3.) 45
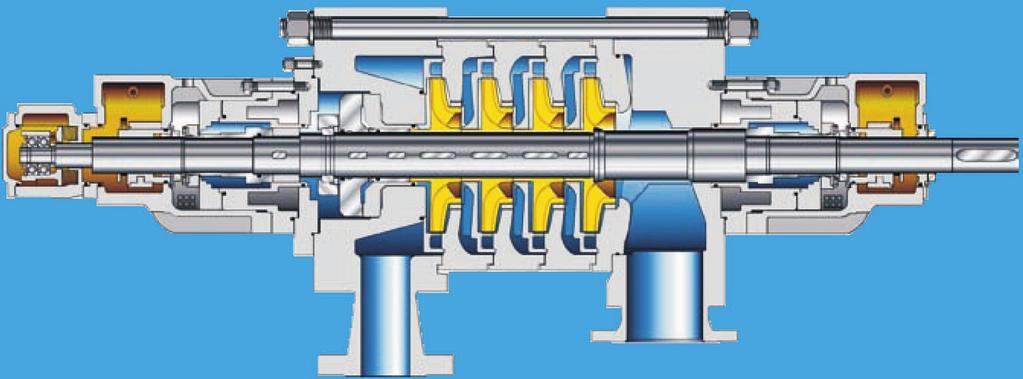
47 gdzie: cm i - składowa merydionalna prdkoci bezwzgldnej w i-tym przekroju ortogonalnym. Rys. 3.. Konstrukcja rodkowej linii prdu W zwizku z powyszym rodkowa linia prdu jest miejscem geometrycznym punktów stycznoci okrgów wpisanych w zarys przekroju merydionalnego kanału hydraulicznego. W podobny sposób wyznacza si rodkow lini prdu dla wszystkich elementów nieruchomych układu przepływowego pompy. Schematy układów hydraulicznych wybranych konstrukcji pomp z zaznaczonymi rodkowymi liniami prdu i przekrojami kontrolnymi przedstawiono na rys. 3. i 3.3. Na rys. 3. pokazany został schemat układu hydraulicznego stopnia odrodkowej pompy wielostopniowej, a na rys. 3.3 schemat układu hydraulicznego monoblokowej pompy jednostopniowej. Na rys. 3.4 i 3.5 przedstawiono przykładowe rozwizania konstrukcjne pompy jednostopniowej i wielostopniowej. 46 Rys. 3.. Schemat układu hydraulicznego stopnia odrodkowej pompy wielostopniowej [59]
48 Oznaczenia elementów układu hydraulicznego pompy: W - wirnik, KO - kierownica odrodkowa, P - przewał, KD - kierownica dorodkowa. Oznaczenia przekrojów kontrolnych: 0 - wlot wirnika, - wlot na wieniec łopatkowy wirnika, - wylot z wirnika, 3 - wlot do kierownicy odrodkowej, 4 - wylot z kierownicy odrodkowej, wlot do przewału, 5 - wylot z przewału, wlot do kierownicy dorodkowej, 6 - wylot z kierownicy dorodkowej. Rys Schemat układu hydraulicznego monoblokowej pompy jednostopniowej z kierownic promieniowo-osiow i płaszczem wodnym [, ] 47


49 Oznaczenia elementów układu hydraulicznego: W - wirnik, D - kierownica bezłopatkowa, K - kierownica promieniowo-osiowa, PW - płaszcz wodny, KT - króciec tłoczny. Oznaczenia przekrojów i punktów kontrolnych: 0 - wlot wirnika, - punkt na powierzchni A przed wlotem na wieniec łopatkowy wirnika, - punkt na powierzchni A na wlocie na łopatki wirnika, - wylot z wirnika, - wylot z wirnika za wiecem łopatkowym, 3 - wylot z kierownicy bezłopatkowej, wlot do kierownicy promieniowo-osiowej przed wiecem łopatkowym kierownicy, 3 - wylot z kierownicy bezłopatkowej, wlot do kierownicy promieniowo-osiowej`, 4 - wylot z kierownicy, wlot do płaszcza wodnego, 4 - wylot z kierownicy za wiecem łopatkowym kierownicy, 5 - wlot do króca tłocznego, t - wylot z króca tłocznego, UP - wlot do uszczelnienia przedniego wirnika. 48 Rys Elementy układu hydraulicznego monoblokowej pompy jednostopniowej: a) ruchome: - wirnik, b) nieruchome: - sito wlotowe, 3 - kierownica promieniowoosiowa, 4 - płaszcz wodny, 5 - króciec wylotowy [30]
 ruchome: - wirnik, b) nieruchome: - konfuzor wlotowy, 3 - współrodkowa komora dopływowa, 4 - łopatkowa kierownica odrodkowa, 5 -")
50 Rys Elementy układu hydraulicznego wielostopniowej pompy odrodkowej: a) ruchome: - wirnik, b) nieruchome: - konfuzor wlotowy, 3 - współrodkowa komora dopływowa, 4 - łopatkowa kierownica odrodkowa, 5 - przewał, 6 - łopatkowa kierownica dorodkowa, 7 - spiralny lub współrodkowy kanał zbiorczy, 8 - dyfuzor wylotowy Pompa zasilajca produkcji WAFAPOMP [9] Do opisu kinematyki przepływu załoono, e prdkoci przepływajcej cieczy w punktach przecicia si rodkowej linii prdu z przekrojami kontrolnymi mona przedstawi w postaci trójktów prdkoci (rys. 3.6 i 3.7). Rys Trójkty prdkoci cieczy przepływajcej przez palisad łopatkow wirnika Prdko c jest prdkoci cieczy w układzie bezwzgldnym, w prdkoci w układzie wzgldnym, u prdkoci unoszenia układu (prdkoci obwodow). Indeksem oznaczone zostały prdkoci i kty w przekroju wlotowym, a indeksem w przekroju wylotowym z wieca łopatkowego wirnika. 49
51 Na rys. 3.6 zaznaczano równie składowe rednich prdkoci bezwzgldnych i kty przepływu czynnika w przekrojach wlotowym i wylotowym wirnika, gdzie: u - prdko unoszenia na wlocie do wirnika, c m - składowa merydionalna prdkoci bezwzgldnej cieczy na wlocie do wirnika, c u - składowa obwodowa prdkoci bezwzgldnej cieczy na wlocie do wirnika, w - prdko wzgldna cieczy na wlocie do wirnika, β - kt napływu cieczy na łopatki na wlocie do wirnika, α - kt midzy prdkoci bezwzgldn c i prdkoci obwodow u, u - prdko unoszenia na wylocie z wirnika, c m - składowa merydionalna prdkoci bezwzgldnej cieczy na wylocie z wirnika, c u - składowa obwodowa prdkoci bezwzgldnej cieczy na wylocie z wirnika, β - kt spływu cieczy z łopatki na wylocie z wirnika, α - kt midzy prdkoci bezwzgldn c i prdkoci obwodow u. Trójkty prdkoci dla nieruchomego elementu układu hydraulicznego przedstawiono na rys Rys Trójkty prdkoci przepływu cieczy w płaszczyznach kontrolnych na wlocie i wylocie w nieruchomych elementach układu hydraulicznego pompy c jest prdkoci przepływajcej cieczy w układzie bezwzgldnym, a jej składowe odpowiednio: c - składowa merydionalna prdkoci bezwzgldnej na wlocie, ( m ) wlot ( u ) wlot c - składowa obwodowa prdkoci bezwzgldnej na wlocie, ( c m ) wylot ( c u ) wylot - składowa merydionalna prdkoci bezwzgldnej na wylocie, - składowa obwodowa prdkoci bezwzgldnej na wylocie. 50
52 Przyjmuje si, e w przekrojach kontrolnych (rys. 3. i 3.3) rozgraniczajcych poszczególne elementy układu hydraulicznego słuszne s równania cigłoci przepływu, momentu pdu i równanie bilansu energii. Równanie cigłoci Równanie cigłoci w modelu jednowymiarowym dla przepływu ustalonego nieciliwego ( ρ = const ) ma posta: Q = c A (3.) m gdzie: c m - składowa urednionej prdkoci bezwzgldnej c, normalna do powierzchni przepływu; w pompach wirowych jest to prdko w płaszczynie merydionalnej, A - powierzchnia przekroju przepływowego kanału hydraulicznego (rys. 3.8). Rys Przekroje kontrolne w układzie hydraulicznym: a) wirnik, b) łopatkowa kierownica odrodkowa Zgodnie z oznaczeniami na rys. 3. na rys. 3.8 zaznaczono wymiary wykorzystywane do okrelenia powierzchni wlotu i wylotu z wieców łopatkowych wirnika i wybranego elementu nieruchomego układu hydraulicznego - kierownicy odrodkowej. 5
53 Na rys. 3.8 a i b oznaczono: D - rednica wlotu na wieniec łopatkowy wirnika, D - rednica wylotu z wieca łopatkowego wirnika, b - szeroko wieca łopatkowego na wlocie do wirnika, b - szeroko wieca łopatkowego na wylocie z wirnika, c m - składowa merydionalna prdkoci bezwzgldnej cieczy na wlocie do wieca łopatkowego wirnika, c m - składowa merydionalna prdkoci bezwzgldnej cieczy na wylocie z wieca łopatkowego wirnika, D - rednica wlotu do kierownicy odrodkowej, 3 D 4 - rednica wylotu z kierownicy odrodkowej, b - szeroko kierownicy na wlocie, 3 b 4 - szeroko kierownicy na wylocie, c 3 m - składowa merydionalna prdkoci bezwzgldnej cieczy na wlocie do kierownicy odrodkowej, c 4 m - składowa merydionalna prdkoci bezwzgldnej cieczy na wylocie z kierownicy odrodkowej. Uwzgldniajc w równaniu (3.) zaznaczone na rys. 3.8 a i b wielkoci, równania cigłoci dla przedstawionych kanałów bd postaci: dla wirnika: dla kierownicy odrodkowej: Qw π Db cm = πdbc m = (3.3) Qk π D3b3c 3m = πd4b4c4 m = (3.4) gdzie: Q w - wydajno przepływu wirnika, Q k - wydajno cieczy przepływajca przez kierownic odrodkow, W równaniach (3.3) i (3.4) nie uwzgldniono współczynników przesłonicia przekrojów zwizanych ze skoczon gruboci łopatek. Współczynniki te zostan zdefiniowane w rozdziałach omawiajcych zwizki midzy parametrami geometrycznymi i przepływowymi w poszczególnych elementach układu hydraulicznego pompy. Równanie momentu pdu (krtu) Równanie momentu pdu, nazywane w mechanice płynów podstawowym równaniem maszyn przepływowych, dotyczy kanałów wirujcych. W przypadku 5
54 pomp dotyczy to wirników. Na rys. 3.9 zaznaczono w płaszczynie prostopadłej do osi wirnika wymiary i prdkoci na powierzchniach kontrolnych (punkty i ). Rys Kinematyka przepływu przez kanał hydrauliczny wirnika Elementarny przyrost momentu pdu (krtu) midzy powierzchniami kontrolnymi i w czasie dt jest postaci: ( R c cos R c α ) ρdqdt dk = α cos (3.5) Róniczkujc równanie (3.5) wzgldem czasu, otrzymuje si równanie momentu sił zewntrznych działajcych na elementarn objto cieczy dq w kanale midzyłopatkowym wirnika: dm u = dk dt = ( R c cos R c α ) ρdq α cos 3 (3.6) Dla całego obszaru przepływu jednowymiarowego po scałkowaniu równania (3.6) otrzymuje si zaleno: M u ( R c cos R c α ) ρq = ( R c R c ) ρq = (3.7) α cos u u Uwzgldniajc w równaniu (3.7) zalenoci wynikajce z trójktów prdko- ci przedstawionych na rys. 3.6: 3 W klasycznej literaturze [8, 39, 40] uywa si indeksów th lub t zamiast u. 53
55 otrzymuje si wzór: M u c u = c (3.8) cosα c u = c (3.9) cosα ( R c R c ) ρq = (3.0) u u Moc przekazywan cieczy przepływajcej w kanale midzyłopatkowym wirnika mona okreli z zalenoci (3.): ( R c R c ) ωρq P = M = (3.) u uω u u Poniewa u = R ω i u = R ω, równanie (3.) przyjmuje posta: P u ( u c u c ) ρq = (3.) u u natomiast energia właciwa (jednostkowa) przekazana cieczy wynosi: e u Pu = = u ρq c uc (3.3) Czciej w nomenklaturze pompowej uywa si poj wysoko energii przekazanej cieczy lub wysoko podnoszenia pompy oraz przyrost cinienia (spitrzenie). Wysoko energii przekazanej lub wysoko podnoszenia pompy wyraa si wzorem: e = = ( u c u c ) (3.4) g g u H u u u a przyrost cinienia (spitrzenia) okrela zaleno: P = ρ e = ρ u c u c ) (3.5) u u ( u u W zwizku z tym, e przedstawione równanie uzalenia energi przekazan bezporednio cieczy od parametrów kinetycznych i geometrycznych, jest ono nazywane podstawowym równaniem maszyn przepływowych. Równanie bilansu energii Równanie bilansu energii przepływu cieczy rzeczywistej dla dowolnego punktu wybranej linii prdu mona zapisa: px cx Z x g S x = const ρ (3.6) 54
56 gdzie: Z x g - energia połoenia, p x ρ c x - energia cinienia, - energia kinetyczna, S - energia strat hydraulicznych. x Równanie (3.6) dla przekroju wlotowego i wylotowego elementu nieruchomego układu hydraulicznego pompy, np. kierownicy odrodkowej (rys. 3.8b), mona zapisa w postaci energii wysokoci: Z p ρg c g p ρg c g = Z hs3 4 (3.7) gdzie: h s3 4 - strata energii wysokoci. 55
57 4. PRZEPŁYW PRZEZ WIRNIK POMPY ODRODKOWEJ Procedury projektowania, oparte na jednowymiarowym modelu przepływu, pozwalaj wyznaczy wymiary główne wirników (rys. 4.) dla zadanych parametrów przepływowych. Dotychczas najczciej były to parametry przepływowe punktu znamionowego H N, Q N oraz sprawnoci η N. Dla potrzeb metod projektowania pomp spełniajcych specjalne wymagania ruchowe procedury te zostały rozszerzone lub zastpione nowymi wynikajcymi z kształtów charakterystyk pomp. Zostały one omówione w rozdziale 9 dotyczcym metod projektowania pomp spełniajcych specjalne wymagania ruchowe. Na rys. 4. przedstawiono schemat kanału hydraulicznego wirnika z zaznaczonymi głównymi wymiarami. 56 Rys. 4.. Główne wymiary wirnika zamknitego Na rys. 4. zaznaczono: d - rednica wału pompy, w d - rednica piasty, p D - rednica wieca łopatkowego wirnika na wlocie, b - szeroko wieca łopatkowego wirnika na wlocie, D - rednica wlotu do wirnika, 0 β - kt konstrukcyjny łopatki na wlocie do wieca łopatkowego; jest to kt midzy styczn do szkieletowej łopatki na rednicy D a kierunkiem obwodowym. Szkieletowa jest to miejsce geometryczne rodków kół wpisanych w profil łopatki (rys. 4.).
58 Rys. 4.. Szkieletowe łopatek: a) o stałej gruboci, b) profilowana, c) o zmiennej gruboci DUP - rednica uszczelnienia przedniego, l - długo uszczelnienia przedniego, UP D - rednica wirnika na wylocie, b - szeroko wieca łopatkowego na wylocie, β - kt konstrukcyjny łopatki na wylocie z wieca łopatkowego wirnika; jest to kt zawarty midzy styczn do szkieletowej łopatki na rednicy D a kierunkiem obwodowym, D UT - rednica uszczelnienia tylnego, l - długo uszczelnienia tylnego, UT d OO - rednica otworów odciajcych, l - długo łopatki mierzona wzdłu łuku szkieletowej. Inne rozwizania konstrukcyjne wirników pomp odrodkowych przedstawiono na rys a) b) Rys Przekroje merydionalne wirników otwartych pomp odrodkowych: a) jednostronne, b) obustronne 57
59 Łatwo zauway, e wirniki otwarte nie posiadaj tarcz przednich. Wirniki otwarte stosuje si czsto w pompach przeznaczonych do transportu cieczy zanieczyszczonych mechanicznie i chemicznie. Procedury projektowania tych wirników róni si współczynnikami empirycznymi w zalenociach wi- cych parametry geometryczne kanałów hydraulicznych z parametrami kinematycznymi przepływu. 4.. Kinematyka przepływu na wlocie do wieca łopatkowego wirnika Kinematyka przepływu jest podstawowym elementem wicym parametry geometryczne i kinematyczne oraz straty hydrauliczne w kanałach przepływowych pomp. Analiza trójkta prdkoci na wlocie do wieca łopatkowego wirnika umoliwia okrelenie kierunku napływu cieczy na łopatk. Moliwe przypadki kierunku napływu przedstawiono na rys. rys. 4.4, 4.5 i 4.6. W trójktach tych prdkoci unoszenia u oraz c m s jednakowe, róni si tylko wartoci prdkoci c u. Prdko ta jest miar zawirowania wstpnego cieczy przed krawdzi wlotow wieca łopatkowego wirnika. Zawirowania wstpne mog by współbiene lub przeciwbiene. W przypadku zawirowania współbienego kierunek i zwrot prdkoci c u jest zgodny z kierunkiem i zwrotem prdkoci obwodowej u (rys. 4.4). Wówczas prdko c u w równaniu okrelajcym warto energii przekazanej przepływajcej cieczy przez wieniec łopatkowy wirnika przyjmuje warto dodatni. Natomiast zawirowanie przeciwbiene charakteryzuje si tymi samymi kierunkami prdkoci c u i u, ale przeciwnymi zwrotami (rys. 4.5). W równaniu okrelajcym warto energii przekazanej przepływajcej cieczy przez wieniec łopatkowy wirnika, prdko c u przyjmuje warto ujemn. W metodach opartych na modelu jednowymiarowym przepływu nie uwzgldnia si prerotacji (zawirowa) naturalnych wywołanych wirowaniem wirnika. Uwzgldnia si jedynie prerotacj wymuszon. Do wytworzenia zawirowa słu specjalnie w tym celu umieszczone na wlocie do wieca łopatkowego urzdzenia (np. kierownice wstpne). W przypadku braku takich elementów przyjmuje si, e warto prdkoci c jest równa zero (rys. 4.6). u 58
60 Zawirowanie wstpne współbiene Rys Napływ cieczy na łopatk wirnika z zawirowaniem wstpnym współbienym W przypadku zawirowania współbienego: kt napływu cieczy na łopatk wyraa si wzorem: c m β = arctg (4.) u c u równanie energii właciwej przekazanej cieczy w wiecu łopatkowym opisane jest zalenoci: eu = ucu uc u 59
61 Zawirowanie wstpne przeciwbiene Rys Napływ cieczy na łopatk wirnika z zawirowaniem wstpnym przeciwbienym W przypadku zawirowania przeciwbienego: kt napływu cieczy na łopatk wyraa si wzorem: c m β = arctg (4.) u + c u równanie energii właciwej przekazanej cieczy w wiecu łopatkowym opisane jest zalenoci: (4.3) eu = u cu + uc u 60
62 Brak zawirowania wstpnego Rys Napływ cieczy na łopatk wirnika bez zawirowania wstpnego W przypadku braku zawirowania wstpnego: kt napływu cieczy na łopatk wyraa si wzorem: c β = arctg m (4.4) u równanie energii właciwej przekazanej cieczy w wiecu łopatkowym opisane jest zalenoci: = (4.5) eu ucu Wlotowy trójkt prdkoci stanowi powizanie kierunku napływu cieczy na łopatk z kierunkiem łopatki i kierunkiem obrotów wirnika. Kt napływu cieczy β moe róni si od kta konstrukcyjnego łopatki β. Warto jego zaley od wydajnoci i moe by wiksza lub mniejsza od kta konstrukcyjnego. Rónica ta, okrelana jako kt natarcia, jest oznaczana przez i : 6
63 i = β (4.6) β Due wartoci kta natarcia s na ogół niekorzystne i powoduj wystpowanie obszarów wirów: przy dodatnich wartociach kta natarcia - po stronie czynnej łopatki (rys. 4.8), przy ujemnych wartociach kta natarcia - po stronie biernej łopatki (rys. 4.7). Rys Napływ cieczy na łopatk wirnika z du ujemn wartoci kta natarcia Rys Napływ cieczy na łopatk wirnika z du dodatni wartoci kta natarcia W obu przypadkach zawirowania te s ródłem strat hydraulicznych, które mog by przyczyn mniejszych sprawnoci pomp oraz powstania kawitacji na wlocie do wieca łopatkowego wirnika. Wir charakteryzuje si spadkiem cinienia w jego jdrze. Kawitacj nazywamy zjawisko polegajce na tworzeniu si i zanikaniu wypełnionych par i gazem obszarów niecigłoci przepływu (pcherzy) w strefie cinienia miejscowo obnionego poniej pewnej wartoci zblionej do wartoci cinienia parowania p w danej temperaturze. v 6
64 O właciwociach antykawitacyjnych pompy decyduj parametry geometryczne wlotu na wieniec łopatkowy wirnika oraz elementy wprowadzajce ciecz do pomp (rury ssawne, spirale wlotowe, komory wlotowe itd.). W literaturze omawiajcej problematyk projektowania wirników pomp najczciej publikuje si zalenoci empiryczne okrelajce parametry geometryczne wlotu do wieca łopatkowego, które maj gwarantowa bezkawitacyjn prac pompy w punkcie nominalnym. Pompy spełniajce specjalne wymagania ruchowe powinny cechowa si bezkawitacyjn prac w całym zakresie zmian wydajnoci 0 Q Q ( 0 max ). W zwizku z tym procedury projektowania tych pomp wymagały opracowania nowych zwizków i formuł okrelajcych parametry geometryczne wlotu do wieców łopatkowych. Wirniki projektuje si zwykle według literatury [7, 34, 39, 40, 64, 66] na podstawie nominalnych parametrów pracy pompy. Nie gwarantuje to pracy wirnika bez kawitacji przy wydajnociach znacznie wikszych i mniejszych od nominalnych. Naley równie w ocenie zagroenia kawitacj uwzgldni charakterystyk układu pompowego po stronie ssawnej pompy. W [4] podano sposób ustalenia granicznych wymiarów rednicy D i szerokoci b oparty na zalenociach empirycznych. Dla przedstawionego na rys. 3.3 schematu układu hydraulicznego mona napisa równanie Bernoulliego odniesione do poziomu cieczy w zbiorniku (oznaczonego indeksem d ) i do przekroju wlotowego łopatek wirnika (przekrój A, punkt ): ρ c ρ cd p + + ρ g h = pd + + ρ g ( H zn z ) ( p s ) d- gdzie: p - cinienie statyczne w punkcie przekroju A, c - prdko bezwzgldna cieczy w punkcie przekroju A, przy czym załoono c = u 0, a w zwizku z tym c = c m, h - wysoko depresji dynamicznej na wlocie wirnika, p - cinienie statyczne nad zwierciadłem cieczy w zbiorniku równe d cinieniu barometrycznemu p b, c - prdko napływu cieczy do pompy 0 d d H zn - geometryczna wysoko napływu, p - straty pomidzy przekrojami kontrolnymi d-, ( s ) d z - rónica poziomu wlotu na wieniec łopatkowy wirnika i poziomu punktu na krawdzi wlotowej łopatki wirnika. W podobny sposób dla przekroju d i 0 mona napisa: max (4.7) 63
65 ρ ρ cd p 0 + c0 = pd + + ρ g ( H zn + z 0 ) ( ρ s ) d 0 (4.8) gdzie: p 0 - cinienie statyczne w przekroju wlotowym wirnika 0-0, c 0 z 0 - prdko cieczy w ww. przekroju, - rónica poziomu wlotu na wieniec łopatkowy wirnika i poziomu wlotu do wirnika. Pomijajc straty hydrauliczne ( p s ) d 0 na odcinku 0- oraz z0 i z ( z 0 << H zn, z << H zn ), mona na podstawie równania (4.7) i (4.8) zapisa zaleno: ρ ρ p + c + ρ g h = p0 + c0 (4.9) Wysoko depresji dynamicznej przyjto zgodnie z [4] okrela wzorem: h = ( w w ) + ( c c ) g gdzie: w, w - prdkoci wzgldne cieczy na wlocie na łopatki wirnika w punktach i : gdzie: c m, cm w w = = u u + c m m + c m m (4.0) (4.) - prdkoci merydionalne cieczy na wlocie do wieca łopatkowego wirnika odpowiednio w punktach i : Q W c m = (4.) π D b µ c m = c m Q W µ = (4.3) π D b gdzie: µ - współczynnik zmniejszenia przekroju wlotowego wirnika przez łopatki: z s µ = π D sin β (4.4) 64
66 gdzie: β - wlotowy kt łopatki, s - grubo łopatki na wlocie do wirnika. Zgodnie z [4] wyznaczone wartoci h dla pomp w przypadku, w którym wystpiło załamanie kawitacyjne charakterystyk przepływu i poboru mocy wykorzystano do oblicze maksymalnych wartoci w i c m gwarantujcych bezkawitacyjn prac wirnika. Dla opisanych w [4] przypadków pomp, wartoci w i c m dla wydajnoci, przy których zaobserwowano kawitacj pocztkow wynosiły w = 4, 5 m i c = m 6. Wartoci te wykorzystano do wyprowadzenia zalenoci empirycznych umoliwiajcych wyznaczenie granicznych wartoci rednicy D s gr i szerokoci wieca łopatkowego wirnika b gr. Wzory podane w [4] maj posta: m s D w c π n u m gr = = m π n,93 = [ π n ] (4.5) gdzie: b Q Qk n = [ µ 68,6 k gr = m u µ cm n. ] (4.6) n ' - czsto obrotów wirnika [/s], Q - graniczna wydajno pompy moliwa do uzyskania przy minimalnych k oporach układu pompowego [ m / s] 3. Czsto zakłada si w obliczeniach Q k = Qmax. Załoenie to zmniejsza zagro- enie wystpienia kawitacji w obszarze pracy pompy. W zwizku z powyszym warunki bezkawitacyjnej pracy pompy mona zapisa: D D b b Posta ogóln zalenoci (4.5) i (4.6) daje si przedstawi nastpujco: gr gr (4.7) cd D = (4.8) π n 65
67 Wartoci stałych c D i cb wynosz: Qmax n u b = = (4.9) µ c µ b max c b m cd =, 93 s m c b 68, 63 s = (4.0) Wartoci c D i c b s wartociami rednimi wyznaczonymi na podstawie oblicze odtworzeniowych czterech pomp zbadanych przez autora i jego zespół. Pompy te charakteryzowały si wyrónikiem szybkobienoci n = q 4.. Kinematyka przepływu na wylocie z wieca łopatkowego wirnika Właciwe okrelenie trójkta prdkoci na wylocie z wieca łopatkowego wirnika decyduje w sposób zasadniczy o zgodnoci wyników bada z danymi wejciowymi do projektowania. Wynika to z faktu wystpowania w podstawowym równaniu maszyn przepływowych (3.3) składowej prdkoci bezwzgldnej na kierunek obwodowy c u, w iloczynie z prdkoci obwodowa u. W przypadku odrodkowych pomp o małych wyrónikach szybkobienoci udział członu u c u ma stosunkowo niewielki wpływ na warto energii przekazanej przepływajcej cieczy przez wieniec łopatkowy wirnika. Warto c u oblicza si z zalenoci wynikajcych z planimetrii trójkta prdkoci na wylocie z wirnika. Punktem wyjcia do okrelenia rzeczywistego trójkta prdkoci na wylocie z wieca łopatkowego wirnika dla przepływu jednowymiarowego jest trójkt teoretyczny wyznaczony dla wirnika o nieskoczonej liczbie łopatek tworzcych nieskoczenie cienkie kanały hydrauliczne. Przyjcie takiego załoenia upowania do stwierdzenia, e spływ cieczy z łopatek wirnika bdzie zgodny z kierunkiem łopatki, czyli β = β. Kinematyka przepływu w wirniku w układzie wymiarowym i bezwymiarowym przedstawiona została na rys
68 Rys Trójkty prdkoci na wylocie z wieca łopatkowego wirnika w układzie: a) wymiarowym, b) bezwymiarowym Zwizki midzy wektorami prdkoci w układzie wymiarowym a wektorami w układzie bezwymiarowym mona zapisa nastpujco: c ϑ = c u τ c c = u u,, ϑ w w = u c = u m, u ϑ = u u (4.) Teoretyczn energi przekazan cieczy zgodnie z zalenoci (3.3) przy załoeniu c 0 mona zapisa: u = e = u c = u τ (4.) u u c gdzie: u - prdkoci unoszenia układu na wylocie z wieca łopatkowego wirnika: u = πd ' (4.3) n u c - składowa obwodowa prdkoci bezwzgldnej dla wirnika o nieskoczonej liczbie łopatek. 67
69 Zgodnie z rys. 4.9: w układzie wymiarowym: w układzie bezwymiarowym: 68 c u u cmctgβ τ = (4.4) = (4.5) c ctgβ Z uwagi na skoczon liczb łopatek w wiecu łopatkowym wirnika kt spływu cieczy β jest zawsze mniejszy od β, co powoduje, e przy tej samej wartoci c m zachodz nierównoci c u < cu lub τ c < τ c. T rozbieno midzy kinematyk teoretyczn i rzeczywist dla jednowymiarowego modelu przepływu okrelaj przedstawione poniej współczynniki. Poprawka Pfleiderera Poprawka Pfleiderera, której warto musi spełnia nastpujce równanie: g ( u c u c ) = ( u c u c )( + c ) u u u u p (4.6) dla c 0 równanie (4.6) przyjmuje posta: u = g ( c ) c = c + u u p (4.7) c p poprawka Pfleiderera, dla łopatek prosto krelnych, wyraa si wzorem: c p = ψ R R dla łopatek o krzywinie przestrzennej: c p st z (4.8) ψr = (4.9) zm gdzie: ψ - współczynnik (bdcy funkcj kształtu wirnika oraz konstrukcji kie- rownicy), z - liczba łopatek. Poniej zestawione zostały wybrane formuły empiryczne opisujce współczynniki ψ najczciej podawane w literaturze: D o dla wirników o pojedynczej krzywinie łopatek i D
70 ( 0,55 0,68) 0,6sin β ψ = + (4.30) o dla wirników z łopatkami o krzywinie przestrzennej D i D (,0,)( sin β ) ψ = + (4.3) o dla pomp z łopatkami o pojedynczej krzywinie i łopatkowan kierownic odrodkow: β ψ = 0,6 + (4.3) 60 o dla pomp ze spiralnym kanałem zbiorczym: β ψ = ( 0,65 0,85) + (4.33) 60 o dla pomp z kanałem zbiorczym o stałym przekroju: ( ) ( + β ) 0,85,0 ψ = (4.34) 60 Współczynnik kontrakcji obwodowej czsto w literaturze jest nazywany slip factor : c µ u = (4.35) c Poniej przedstawiono wybrane formuły empiryczne okrelajce współczynnik kontrakcji obwodowej. Według Stodoli: u u µ u = π + sin β ψ z u (4.36) gdzie: ψ u - bezwymiarowy wskanik napdu. 69
71 Według Ecka: gdzie: µ u = D b π + 8s z sin β (4.37) s - moment statyczny przekroju merydionalnego wieca łopatkowego wzgldem osi obrotu pompy. Według Gundlacha: µ u = + B u π sin β ψ z u (4.38) gdzie: B u - współczynnik empiryczny wyznaczony w funkcji parametrów kinematycznych i konstrukcyjnych wirnika. Według Kuczewskiego: µ u mc ctgβ m u = (4.39) u mcmctgβ gdzie: m - współczynnik nierównomiernoci strugi w przekroju merydionalnym na wylocie z wirnika. Kt odchylenia strugi na wylocie z wieca łopatkowego z wirnika ϑ W metodzie opracowanej przez Kuczewskiego [34], zgodnie z definicj, kt ϑ jest to kt zawarty pomidzy ktem konstrukcyjnym łopatki β a ktem wypływu cieczy na wylocie z wirnika β : ϑ = (4.40) β β Graficzn ilustracj kta ϑ odchylenia strugi od kierunku łopatki przedstawiono na rys
72 Rys Trójkt prdkoci na wylocie z wirnika. Kt odchylenia strugi ϑ Warto kta ϑ jest równoczenie proporcjonalna do rónicy któw konstrukcyjnego łopatki β i kta β 0 spływu cieczy na wylocie z łopatki o zerowej sile nonej ( c u = 0) : gdzie: ϑ ( β ) = β 0 B (4.4) B - wyrónik kształtu wirnika, β 0 - kt spływu cieczy na wylocie z łopatki o zerowej sile nonej (pompa, dla której H = 0 ): c β = u m 0 = arc tg arc tg (4.4) Rys. 4.. Kinematyka przepływu cieczy na wylocie z wirnika z łopatk o zerowej sile nonej Wyrónik B jest złoon funkcj parametrów geometrycznych i dla zamknitych wirników odrodkowych zgodnie z [9,, 3, 36, 6, 63] okrelany jest wzorem: 7
73 µ bd b B = k (4.43) µ b D D D τ gdzie: µ i µ - współczynniki przesłonicia przekroju odpowiednio wylotowego i wlotowego wirnika, k - współczynnik metody Kuczewskiego, τ - gsto palisady łopatek wirnika. gdzie: l - długo łopatki, t - rednia podziałka wirnika. r ( D + D ) t r l τ = (4.44) π s s t = + r (4.45) z sinβ sinβ gdzie: z - liczba łopatek, s, s - grubo łopatki na wlocie i wylocie wirnika. Pompy spełniajce specjalne wymagania ruchowe charakteryzuj si szerokim zakresem pracy, w przypadku którego punkt obliczeniowy jest pojciem umownym. Fakt ten powoduje, e interesujce jest okrelenie zmiennoci zwizków midzy kinematyk rzeczywist zastpczej strugi a kinematyk teoretyczn w szerokim zakresie zmian wydajnoci cieczy przepływajcej przez wirnik. 7 Rys. 4.. Zmiana połoenia wierzchołka wylotowego trójkta prdkoci podczas zmian wydajnoci dla hipotezy B = const, β = const i µ = const
74 Zgodnie z hipotez B = const pracy wirnika w zmiennych warunkach, wierzchołek trójkta prdkoci przemieszcza si podczas zmian wydajnoci wzdłu krzywej B = const (rys. 4.). Na rysunku tym zaznaczono równie przebieg przemieszcze wierzchołka trójkta prdkoci dla hipotezy β = const i µ = u const. Zgodnie z hipotez β = const kt β spływu cieczy z łopatki na wylocie z wirnika jest stały dla rónych wartoci wydajnoci pompy. Punkt N przecicia linii obrazujcych tory wierzchołka trójkta dla hipotez β = const, µ u = const i B = const jest dla pompy nominalnym punktem pracy. W wietle bada [3, 5, 53, 6] adna z wymienionych hipotez pracy wirnika w zmiennych warunkach nie jest słuszna w całym zakresie pracy pompy. Najwiksze odchylenie wykazuje hipoteza µ const, zgodno w najszerszym przedziale daje hipoteza B = const, według której zmiana kta β jest okrelona nastpujc zalenoci: u = ( B ) β + B 0 β = β (4.46) a uwzgldniajc zaleno (4.4) we wzorze (4.46) otrzymuje si zaleno (4.47): ( B ) β + Barctg β = (4.47) W zwizku z tym posta bezwymiarowej charakterystyki energii przekazanej cieczy w kanałach hydraulicznych wirnika jest okrelana wzorem: [( B) β Barctg ] { ctg } ψ = (4.48) u + Równie w pozostałych zalenociach wicych parametry geometryczne z kinematycznymi wirnika uwzgldniana była hipoteza B = const Straty hydrauliczne w wirniku Straty hydrauliczne w wirniku okrelane s w układzie wymiarowym zalenoci [7, 3, 34]: ρ ( p ) = [( u u ) + ( w w )] s 0- lub w układzie bezwymiarowym: ζ W (4.49) u u w w ψ = + s0 ζ 0 (4.50) u u 73
75 gdzie: ς 0 - współczynnik strat hydraulicznych przedstawiony na rys. 4.3 jako funkcja ς / ), 0 ( N w, w - prdko wzgldna odpowiednio w przekroju kontrolnym lub, u,u - prdko unoszenia odpowiednio w przekroju kontrolnym lub. Rys Współczynnik strat hydraulicznych ς / ) wirnika 0 ( N Przebieg krzywych ς / ) dotyczy pomp o wyróniku szybkobienoci w zakresie n = q 0 ( N Po odpowiednich przekształceniach równania (4.50) oraz uwzgldnieniu zalenoci (.) i (.) otrzymuje si wzory okrelajce: bezwymiarowy wskanik strat hydraulicznych: Dbµ ψ s0 = ζ 0 { ψ u ψ u [ ( ) ]} (4.5) 4 D b µ bezwymiarowy wskanik przyrostu cinienia statycznego w wirniku: ψ 0 = ψ ψ 0 = ( ζ 0 ) ( ψ u ψ u ) ς 0 + ( Dbµ ) ( D0 d p ) ( D b µ ) (4.5) 74
76 gdzie: ψ - bezwymiarowy wskanik równowany cinieniu statycznemu na wylocie z wirnika, ψ 0 - bezwymiarowy wskanik równowany cinieniu statycznemu na wlocie do wirnika, ψ u - bezwymiarowy wskanik przekazania energii przez wirnik przepływajcej cieczy, - bezwymiarowy wskanik przepływu przez wirnik. 75
77 5. ELEMENTY DOPROWADZAJCE CIECZ DO WIRNIKA Kształt kanałów przepływowych doprowadzajcych ciecz do wirnika ma decydujcy wpływ na cinienie i rozkład prdkoci na wlocie do wirnika. Straty przepływu w elementach wlotowych maj istotny wpływ na sprawno i nadwyk antykawitacyjn wirnika pompy jednostopniowej. W pompach wielostopniowych straty te maj mniejszy wpływ na sprawno całkowit, ale maj wpływ na wirnik pompy pierwszego stopnia. Na rys. 5. zostały przedstawione najczciej spotykane rozwizanie konstrukcyjne wlotów pomp. Procedury projektowania kanałów hydraulicznych doprowadzajcych ciecz do wirnika pompy powinny uwzgldnia: płynn zmian powierzchni przekroju midzy wlotem do pompy a wlotem do wirnika; takie zmiany przekroju powierzchni bd powodowa płynny wzrost prdkoci cieczy oraz wyrównany profil prdkoci na wlocie do wirnika, umieszczenie promieniowego ebra (rys. 5.d) zapobiegajcego powstawaniu wstpnego zawirowania (prerotacji) cieczy, proporcje wymiarów głównych:. rednice wlotowe króców ssawnych d s zgodne z zalecanymi przez normy dotyczce rurocigów,. prdkoci cieczy w krócach ssawnych, zgodnie z (5.), powinny zawiera si w podanych granicach Q 4Q m cs = = = 3 A πd s s s (5.) 3. zaleca si, aby przekrój wlotowy króca ssawnego A s w stosunku do przekroju wlotowego wirnika A w był o ( 5 5)% wikszy. W zwizku z coraz czstszymi aplikacjami metod optymalizacji, wykorzystujcymi równie metody oblicze numerycznych [43], s równie prowadzone prace nad poszukiwaniem optymalnych konstrukcji elementów doprowadzajcych ciecz do wirnika. W [6] przedstawiono koncepcj optymalizacji sprawnoci i nadwyki antykawitacyjnej stopnia wlotowego odrodkowej pompy wielostopniowej lub jednostopniowej. Przedstawione w [8] badania wykazały e stopie wlotowy w pompach wielostopniowych obejmujcych: komor wlotow, wirnik, łopatkow kierownic odrodkow, łopatkow kierownic dorodkow ma mniejsz sprawno ni tak zwane stopnie rodkowe pompy wielostopniowej (rys. 3.5). 76
78 Rys. 5.. Schematy wybranych kanałów przepływowych doprowadzajcych ciecz do wirnika: a) króciec cylindryczny, b) króciec stokowy, c) kolano redukcyjne, d) współrodkowa komora dopływowa, A, B - ebra zapobiegajce zawirowaniu naturalnemu cieczy, e) spiralna komora dorodkowa pompy dwustrumieniowej [8] 77
, zaley od liczby stopni: gdzie: η + η = n I i= 3 η I - sprawno stopnia pierwszego, η - sprawno stopnia rodkowego, i η + η n i k (5.) η k - sprawno stopnia wylotowego (kocowego), n - liczba stopni.")
79 Udział w obnieniu sprawnoci pompy przez sprawno stopnia pierwszego, zgodnie z równaniem (5.), zaley od liczby stopni: gdzie: η + η = n I i= 3 η I - sprawno stopnia pierwszego, η - sprawno stopnia rodkowego, i η + η n i k (5.) η k - sprawno stopnia wylotowego (kocowego), n - liczba stopni. Przyczynami obnionej sprawnoci stopnia pierwszego pompy wielostopniowej w stosunku do pozostałych stopni s: wymagania dotyczce nadwyki antykawitacyjnej, nierównomierny rozkład prdkoci cieczy na wlocie do wirnika pierwszego stopnia zarówno co do kierunku, jak i wartoci; na czci obwodu ciecz ma składowe obwodowe prdkoci bezwzgldnej przed wlotem na łopatki wirnika zgodne z kierunkiem wirowania, a w drugiej czci w kierunku przeciwnym (rys. 5.). Rys. 5.. Rozkład prdkoci w komorze wlotowej pompy odrodkowej wielostopniowej: a) składowe obwodowe na wlocie do wirnika stopnia pierwszego, b) składowe merydionalne [6] Realizacja minimalnej nadwyki antykawitacyjnej, pozostajca w cisłym zwizku z warunkami zabudowy pompy (wysoko ssania lub napływu, długo rurocigu ssawnego, liczba elementów specjalnych w rurocigu ssawnym itp.), 78
80 wymaga uzgodnienia parametrów geometrycznych komory wlotowej oraz wieca łopatkowego na wlocie do wirnika. Z kolei parametry wlotowe wieca łopatkowego wirnika maj wpływ na jego sprawno. Wybór optymalnego rozwizania wymaga uzgodnienia geometrii komory wlotowej, jak i wirnika w aspekcie realizacji minimalnej z moliwej nadwyki antykawitacyjnej oraz maksymalnej z moliwych sprawnoci pierwszego stopnia pompy. Wymaga to obecnie stosowania w metodach projektowania tych elementów metod optymalizacji konstrukcji [43]. 79
81 6. ELEMENTY ODPROWADZAJCE CIECZ W zwizku z tym, e ciecz wypływajca z wirnika ma prdko znacznie wiksz ni wymagana w rurocigu tłocznym, prdko ta musi by zmniejszona, a energia kinetyczna z ni zwizana zamieniona na energi cinienia z moliwie małymi stratami hydraulicznymi. Do tego celu słu zainstalowane za wirnikiem w pompach odrodkowych wielostopniowych nastpujce elementy: kierownica bezłopatkowa, łopatkowa kierownica odrodkowa, przewał, łopatkowa kierownica dorodkowa (rys. 3.5). Za kierownic ostatniego stopnia pompy wielostopniowej znajduj si kanały zbiorcze. W pompach monoblokowych jednostopniowych za wirnikiem moe znajdowa si kierownica bezłopatkowa, z której ciecz wpływa do łopatkowej kierownicy promieniowo-osiowej, a nastpnie do przestrzeni midzy płaszczem zewntrznym pompy a płaszczem zewntrznym napdowego silnika elektrycznego, skd krócem tłocznym wpływa do rurocigu tłocznego (rys. 3.4). W rozwizaniu pokazanym na rys. 7. ciecz z wirnika wpływa do kierownicy spiralnej. W przeciwiestwie do wirników, szczególnie trudne jest zaprojektowanie, na podstawie literatury, optymalnych energetycznie kierownic odrodkowych łopatkowych, i to zarówno ze wzgldu na sposób ustalania ich podstawowych wymiarów oraz kształtowania układów łopatkowych, jak równie okrelania parametrów energetycznych i wyznaczania strat hydraulicznych. Na wlocie do łopatkowej kierownicy odrodkowej i wylocie z łopatkowej kierownicy dorodkowej problemy obliczeniowe i pomiarowe dotyczce wlotu i wylotu wynikaj z wzajemnego oddziaływania wirujcych i nieruchomych elementów stopni pompy. Przepływ przez nieruchome elementy stopnia pomp i sprarek wielostopniowych oraz ich wzajemne oddziaływanie z wirnikiem było przedmiotem licznych prac badawczych [, 4, 8,, 44, 59, 60]. Kinematyka przepływu, straty przepływowe oraz schematy konstrukcji kanałów nieruchomych elementów odprowadzajcych ciecz z wirnika omówione zostan w kolejnych rozdziałach. 6.. Kierownica bezłopatkowa 6... Kinematyka przepływu przez kierownic bezłopatkow Kierownica bezłopatkowa jest równoległotarczowym elementem o stosunkowo małej rónicy rednic, obejmujcym przestrze pomidzy przekrojami kontrolnymi -3 (rys. 3.). Napływajca do kierownicy ciecz z wirnika posiada zrónicowane pole prdko- ci i cinie, a skoczona grubo łopatek wirnika wywołuje lady załopatkowe oraz 80
82 pulsacje przepływu wynikajce z wzajemnego oddziaływania łopatek wirnika i łopatkowej kierownicy odrodkowej stanowicej kolejny element przepływowy. Na rys. 6. została przedstawiona geometria i kinematyka przepływu w kierownicy bezłopatkowej. Rys. 6.. Bezłopatkowa kierownica odrodkowa - główne wymiary oraz kinematyka na wlocie i wylocie Ze wzgldu na niewielk odległo midzy wirnikiem a kierownic mona załoy, e: ( cu ) cu ( cm ) c m R d R; ; d d (6.) Dla okrelenia parametrów przepływowych na wlocie i wylocie kierownicy bezłopatkowej wykorzystuje si: równanie cigłoci: skd: π = (6.) Dbcm πd3b3c 3m R 3 = (6.3) c m cm R3 równanie stałego krtu Rc u = const : R cu R3c3u = (6.4) 8
83 R 3 = (6.5) c u cu R3 W zwizku z tym kt napływu cieczy do kierownicy bezłopatkowej i wypływu okrela wzór: cm c3m tgα = = = const (6.6) c c u Z wzoru (6.6) wynika, e czstki cieczy w kierownicy bezłopatkowej poruszaj si po spirali logarytmicznej, charakterystycznej dla przepływu potencjalnego. Dla rzeczywistej cieczy charakteryzujcej si okrelon lepkoci powodujc zmniejszanie prdkoci, warto kta wypływu bdzie wiksza ni w prze- c 3 u pływie potencjalnym. Łatwo zauway, e długo toru czstek zaley od wartoci prdkoci merydionalnej c m. Im mniejsza warto c m, tym droga czstki w obszarze kierownicy bezłopatkowej jest wiksza. Z kolei wiadomo, e straty hydrauliczne s funkcj długoci toru czstek; dlatego powinno si ogranicza wymiary promieniowe kierownicy bezłopatkowej do niezbdnego minimum wynikajcego z konstrukcji pomp Straty hydrauliczne w przepływie przez kierownic bezłopatkow Bezwymiarowe równanie bilansu energii dla kierownicy bezłopatkowej ma posta: 3u c c ψ (6.7) 3 + = ψ ψ s 3 u u gdzie: ψ s 3 - bezwymiarowy wskanik strat hydraulicznych w kierownicy bezłopatkowej, ψ ψ 3 c - bezwymiarowy wskanik cinienia statycznego na wlocie do kierownicy bezłopatkowej, - bezwymiarowy wskanik cinienia statycznego na wylocie z kierownicy bezłopatkowej, - prdko bezwzgldna w przekroju : c = c + c (6.8) u m c 3 - prdko cieczy w przekroju kontrolnym 3: 8
84 c = c + c (6.9) 3 3u 3m Straty hydrauliczne [63] w równaniu (6.7) wyraaj si wzorem: c ψ s 3 = ζ 3 (6.0) u Wystpujcy w powyszych równaniach współczynnik strat hydraulicznych ζ, odnoszcy si do kierownicy bezłopatkowej, przedstawiono na rys Rys. 6.. Współczynnik strat hydraulicznych ς / ) kierownicy bezłopatkowej 3( N Przebieg krzywych ς / ) dotyczy pomp o wyróniku szybkobieno- ci w zakresie n = q ( 3 N Uwzgldniajc w równaniu (6.0) zalenoci (.) i (.) oraz dokonujc przekształce tych zalenoci, otrzymuje si wzór na bezwymiarowy wskanik strat: ψ s 3 = ζ 3 ψ u + (6.) 4 83
85 Znajomo wartoci współczynnika ζ 3 umoliwia wyznaczenie bezwymiarowego wskanika przyrostu cinienia statycznego z zalenoci: ς = ( 3 ) ( + ψ 4 ψ 3 = ψ 3 ψ = u ) ψ 4 u D D 3 D b K D3 b3 µ µ 3 (6.) gdzie: - bezwymiarowy wskanik przepływu przez wirnik, ψ u - bezwymiarowy wskanik podnoszenia pompy wynikajcy z równa- K nia Eulera dla rzeczywistego przepływu, - bezwymiarowy wskanik przepływu przez kierownic bezłopatkow. 6.. Łopatkowa kierownica odrodkowa 6... Kinematyka przepływu przez łopatkow kierownic odrodkow Łopatkowa kierownica odrodkowa zawarta midzy przekrojami kontrolnymi 3-4 (rys. 3.) stanowi podstawowy element zamiany energii kinetycznej, jak ma ciecz po wyjciu z wirnika i uporzdkowaniu przepływu w kierownicy bezłopatkowej, na przyrost cinienia statycznego przy moliwie najmniejszych stratach. Kierownica odrodkowa łopatkowa składa si z dwóch tarcz, które czsto mog by równoległe oraz szeregu symetrycznie rozmieszczonych łopatek tworzcych rozszerzajce si kanały (rys. 6.3). W klasycznych łopatkowych kierownicach odrodkowych pomp wyrónione s dwa obszary. Obszar wlotu, projektowany na podstawie zasad i kryteriów stosowanych w projektowaniu kolektorów spiralnych, oraz obszar dyfuzorowy z czci wylotow, projektowany na podstawie kryteriów dotyczcych tego typu kanałów przeniesionych z wieców łopatkowych. Strona wklsła łopatki kierownic odrodkowych stanowi wic najczciej połczenie spirali logarytmicznej z lini prost wyprowadzon pod ktem konstrukcyjnym, bdcym głównie konsekwencj przyjtej liczby łopatek i stosunku rednicy wylotowej do rednicy wlotowej kierownicy. Strona wypukła jest zwykle lini jedno- lub dwułukow o ktach znacznie wikszych od któw strony wklsłej, co stanowi problem w jednoznacznej ocenie parametrów wylotowych tego elementu. Podstawowym kryterium oceny łopatkowej kierownicy odrodkowej jest płynno przekroju hydraulicznego oraz wartoci przekroju A = a b 3 3 (rys. 6.3) pomidzy czci spiraln i kanałem midzyłopatkowym. 84
86 Rys Łopatkowa kierownica odrodkowa - główne wymiary W przypadku kierownicy bezłopatkowej torem czsteczki byłaby spirala logarytmiczna o stałym kcie nachylenia α (krzywa ABC na rys. 6.3). Zadaniem ' łopatek kierowniczych jest skrócenie toru czsteczki i zwikszenie kta α 4 > α3. W obszarze EFG, otwartym od strony wirnika, łopatki nie oddziałuj na ciecz, dlatego torem kadej czstki cieczy jest spirala logarytmiczna wyraona wzorem: ' 3 r ϑ tg α 3 = ln (6.3) r Z tego równania wynika teoretyczny kształt łopatek kierownicy do obszaru, gdzie zaczyna si kanał zamknity (na rys. 6.3 od E do F). Od przekroju FG zaczyna si kanał zamknity i od tego miejsca mona zmienia warto i kierunek prdkoci, a do przekroju wylotowego o szerokoci a 4 (tor BD). Projektujc łopatkow kierownic odrodkow, trzeba przyj: rednic wlotu na łopatki D 3, rednic zewntrzn kierownicy D 4, szeroko kierownicy na wlocie b 3, szeroko kierownicy na wylocie b 4, liczb łopatek kierownicy z K, grubo łopatki na wlocie s 3, grubo łopatki na wylocie s 4, 3 85
87 współczynnik przesłonicia wlotu µ 3 wynikajcy z poniszych załoe (6.), współczynnik kontrakcji χ 3 =,4, 8. Główne wymiary kierownicy na podstawie dowiadcze przyjmuje si zazwyczaj nastpujco: stosunek rednicy zewntrznej kierownicy odrodkowej do wirnika: D D 4 odległo midzy łopatkami wirnika a łopatkami kierownicy odrodkowej:,4 (6.4) D3 D r = = 6[ mm] (6.5) szeroko wlotu kierownicy odrodkowej w przekroju merydionalnym: ( 0,0 0, ) D b = (6.6) 3 b + 05 Procedura oblicze prdkoci na wlocie i wylocie łopatek kierowniczych jest nastpujca: składowa merydionalna prdkoci bezwzgldnej po wypływie z wirnika: c m QW = (6.7) πd b gdzie: Q W - wydajno cieczy przepływajcej przez wirnik (rozdział 9). składowa obwodowa prdkoci bezwzgldnej po wypływie z wirnika przy załoeniu c 0 : u = c u gh = (6.8) η u gdzie: u - prdko obwodowa na wypływie z wirnika wynika z wzoru (4.3), ηh - sprawno hydrauliczna pompy. Sprawno hydrauliczn okrela si z zalenoci podanej przez Łomakina [40]: h 0,4 η h = ( log ) (6.9) 0. 7 d zr gdzie: d zr - rednica zredukowana obliczona na podstawie zalenoci Suchanowa [66]: 86
88 3 Q ( ) 3 N dzr = 4,0 4,5 0 (6.0) n kt pochylenia prdkoci bezwzgldnej na wypływie z wirnika: c m α = arctg (6.) cu współczynnik przesłonicia przekroju wlotowego kierownicy wynikajcy ze skoczonej gruboci łopatek: µ = 3 πd 3 πd3 z K s3 sin α strumie objtoci cieczy płyncej przez kierownic: gdzie: up Q K W up (6.) = Q Q (6.3) Q - przeciek przez uszczelnienie przednie wirnika (rozdział 9), składowa obwodowa: składowa merydionalna: cur cu 3 = (6.4) r c 3 µ Q K m3 = (6.5) πd3b3 Kt pochylenia prdkoci bezwzgldnej przed wlotem na łopatki kierownicy: Kt nachylenia łopatki na wlocie kierownicy: c m3 α = 3 arctg (6.6) cu3 ( tg ) α = arctg χ µ α (6.7) Sprawdzenie współczynnika przesłonicia wlotu: µ = 3 πd 3 πd3 zk s3 sinα 3 (6.8) 87
89 Korzystajc z wzoru (6.3), mona wyznaczy kształt wlotowej czci łopatki kierownicy, która jest spiral logarytmiczn: r ϑ = ln (6.9) tgα 3 r3 Jak wykazały badania [39] wikszy wpływ na sprawno pompy ma warto pola A 3 na wejciu do kanału midzyłopatkowego kierownicy ni kt nachylenia łopatki α 3. Pole A 3 stanowi zatem wielko podstawow do obliczenia wymiarów kierownicy i powinno mie kształt zbliony do kwadratu. Najprostsza metoda obliczenia pola A 3 polega na przyjciu pocztkowego odcinka łopatki kierownicy za cz spiralnego kanału zbiorczego, wówczas: = A 3 (6.30) 360 A z K gdzie: A360 - sumaryczne pole powierzchni spiralnych odcinków wlotowych: QK A 360 = (6.3) c c sp - prdko przepływu cieczy w przekroju wlotowym kierownicy: K csp sp csp sp c = K gh (6.3) - współczynnik eksperymentalny wyznaczony z wykresu: N Rys Zaleno współczynnika K csp od wyrónika n q wg A.J. Stepanoffa [64] 88
90 lub okrelony poniszym wzorem (6.33) wg W. Jdrala [8, 39] na podstawie [64]: K csp 3, ,75 q = nq (6.33) n Nastpnie wyznacza si wysoko spiralnej czci kanału w przekroju poprzecznym dla załoonej szerokoci b 3 kierownicy odrodkowej A 3 a 3 = (6.34) b3 Teoretyczna rednia prdko wypływu cieczy z łopatkowej kierownicy od- rodkowej: teoretyczna prdko bezwzgldna: składowa obwodowa teoretycznej prdkoci cieczy: c 4 Qk = (6.35) z A k 4 c u = c (6.36) 4 4 cosα 4 składowa merydionalna teoretycznej prdkoci cieczy: c m = c (6.37) 4 4 sinα 4 W celu obliczenia rednich rzeczywistych prdkoci na wylocie kierownicy naley, podobnie jak w wirniku, wyznaczy współczynnik poprawkowy: gdzie: p ψ r ψ K - współczynnik eksperymentalny: K 4 K = (6.38) zk M st ( sin ) ψ = 0,6 + α K 4 (6.39) M st - moment statyczny rodkowej linii prdu łopatkowej kierownicy odrodkowej w przekroju merydionalnym: M st ( r r ) Rzeczywista składowa obwodowa prdkoci cieczy: = 4 3 (6.40) 89
91 r 3 c = + u 4 c4 pk cu3 (6.4) + pk r4 Ze wzgldu na odchylenie strumienia na spływie z łopatek rzeczywisty kt α bdzie mniejszy od kta α łopatki i wyniesie: 4 4 c m4 α = 4 arctg (6.4) cu 4 Kinematyk przepływu jednowymiarowego przez łopatkow kierownic od- rodkow przedstawiono na rys Rys Kinematyka przepływu cieczy przez łopatkow kierownic odrodkow Wlot - przekrój 3, wylot - przekrój 4 Zgodnie z rys. 6.5 i 3 - kt natarcia na wlocie na łopatki kierownicy równa si: i (6.43) 3 = α 3 α 3 ϑ 4 - kt odchylenia strugi od kierunku łopatki na wylocie z kierownicy (rys. 6.5) Straty hydrauliczne w przepływie przez łopatkow kierownic odrodkow Bezwymiarowe równanie bilansu energii dla odrodkowej kierownicy łopatkowej ma posta: c c ψ (6.44) = ψ ψ s3 4 u u gdzie: 4 ψ - bezwymiarowy wskanik cinienia statycznego w przekroju kontrolnym 4, 90
92 c 4 - prdko cieczy na wylocie z łopatkowej kierownicy odrodkowej: c = c + c (6.45) 4 4u 4m ψ s3 4 - straty hydrauliczne w odrodkowej kierownicy łopatkowej. Straty hydrauliczne w równaniu (6.44) s wyznaczane z wzoru: c ψ s3 4 = ζ 3 4 (6.46) u gdzie: ζ współczynnik strat został przedstawiony na rys Rys Współczynnik strat hydraulicznych ς / ) odrodkowej kierownicy łopatkowej ( 3 4 N Przebieg krzywych ς / ) dotyczy pomp o wyróniku szybkobieno- ci w zakresie n = q ( 3 4 N Uwzgldniajc w równaniu (6.46) zaleno (.) i (.) oraz dokonujc przekształce tych zalenoci, otrzymuje si równanie strat hydraulicznych w postaci: ψ D b µ s = ζ K (6.47) D3 b3 µ 3 sin α 3 9
93 Znajomo współczynników strat umoliwia wyznaczenie bezwymiarowego wskanika przyrostu cinienia statycznego w kierownicy odrodkowej: ψ 3 4 D = ψ = 4 ψ 3 K D3 b3 ( ζ 3 4 D3 b ) D4 b 3 4 b µ µ 3 sinα3 µ 3 sinα3 µ 4 sinα 4 + (6.48) Równania bilansu energii i strat hydraulicznych wraz z równaniem cigłoci przepływu pozwalaj dobra główne wymiary konstrukcyjne oraz wyznaczy parametry hydrauliczne na wlocie i wylocie z łopatkowej kierownicy odrodkowej. O moliwoci realizacji ustalonych parametrów hydraulicznych w rozpatrywanych przekrojach kontrolnych (3-4) decyduje ukształtowanie kanałów na drodze przepływu cieczy zarówno w płaszczynie merydionalnej, jak i w płaszczynie prostopadłej do osi pompy. Wzajemna relacja pomidzy tymi przekrojami jest szczególnie wana w odrodkowych kierownicach łopatkowych, w których dla zapewnienia przepływu z jak najmniejszymi stratami, bez zawirowa i oderwa cieczy, kształt kanałów w płaszczynie merydionalnej musi by powizany z ukształtowaniem łopatki i kanałów w płaszczynie prostopadłej do osi pompy. Usprawnieniem procesu projektowania kanałów i układów łopatkowych na drodze oblicze analitycznych, zapewniajcym realizacj załoonych parametrów hydraulicznych, s dwie metody przedstawione w [59], których załoenia zostały przedstawione w kolejnych rozdziałach monografii Metodyka analitycznego projektowania łopatkowej kierownicy odrodkowej Zaproponowana w [59] metoda analityczna projektowania kierownic odrodkowych umoliwia poszukiwanie optymalnej geometrii układów łopatkowych kierownicy odrodkowej z wykorzystaniem technik komputerowych. Dla kształtowania kanałów midzyłopatkowych kierownicy załoono, e przepływ odbywa si: z danym rozkładem teoretycznym prdkoci redniej wariant I, według przyjtej zmiany krtu teoretycznego wariant II. Realizacja załoe umoliwiła okrelenie dla obu wariantów: szerokoci kanału hydraulicznego w przekroju merydionalnym, współczynnika powierzchni przekroju przepływowego kanału kierownicy, teoretycznej składowej obwodowej prdkoci i kta konstrukcyjnego łopatki, współrzdnych biegunowych łopatki. 9
94 Poniej podano jedynie załoenia, a w algorytmie metody projektowania stopni odrodkowych pomp wielostopniowych o danej charakterystyce przepływu (rozdział 9) pozostałe wzory w kocowej postaci. WARIANT I dany rozkład teoretyczny składowej obwodowej prdkoci cieczy (R) c u Szeroko kanału hydraulicznego w przekroju merydionalnym W przekroju merydionalnym, kanały kierownicy odrodkowej mog charakteryzowa si stał szerokoci b = b 3 = b4 lub zmieniajc si w taki sposób, e jedna z tarcz (zwykle po stronie tłocznej pompy) odchylona jest od pionu pod 0 pewnym katem γ ( γ = 0 6 ), tworzc powierzchni stokow. Spotykane s równie kierownice odrodkowe, których powierzchnia wewntrzna ograniczajca przekrój merydionalny po stronie tłocznej stanowi fragment czaszy kulistej o bardzo duym promieniu ρ (rys. 6.7). Rys Stosowane w praktyce kształty przekroju merydionalnego odrodkowych kierownic łopatkowych Przyjto, e zmian szerokoci b kanału kierownicy odrodkowej w funkcji promienia R mona w ogólnym przypadku przedstawi za pomoc równania: b k br + k br + k0b = (6.49) gdzie:, - stałe współczynniki równania wyznaczane z warunków: k b k b, k0b b = dla R = R3 b 3 b = dla R = RP b P (6.50) b = dla R = R4 b 4 93
95 Rys Zarys przekroju merydionalnego i zaleno b (R) Punkt P o współrzdnych ( b, R R P P 3 R P R 4 b 3 b P b 4 ) zawartych w granicach: (6.5) (cho, jak wynika z rys. 6.7, moliwe s rozwizania, w których b > 3 b > P b4 ) stanowi punkt pomocniczy, dobrany w taki sposób, aby otrzyma w rezultacie odpowiedni przekrój merydionalny odrodkowej kierownicy łopatkowej. W praktyce wygodniej jest posługiwa si bezwymiarow szerokoci kanału b R kierownicyb = oraz bezwymiarowym promieniem kierownicy R =. b 3 Wobec tego równanie (6.49) przyjmuje posta: b K br + K br + K0b = (6.5) Dla najczciej stosowanej w praktyce prostoliniowej zalenoci b (R) musi by spełniony warunek: b4 b P = ( RP ) + (6.53) R natomiast dla kanału o stałej szerokoci b = b = bp = b = R 3 94
96 Ustalony zarys merydionalny odrodkowej kierownicy łopatkowej, po uwzgldnieniu współczynnika przesłonicia przekroju przez łopatki µ, bdzie decydował o zmianie przekroju merydionalnego kanałów A (R) i tym samym o przebiegu redniej prdkoci merydionalnej c m wzdłu promienia R. Zaleno b (R) ma istotny wpływ na przebieg kta konstrukcyjnego łopatki α ( R), a wic i na kształt łopatki i kanału w przekroju poprzecznym, przy tym samym załoonym rozkładzie teoretycznej redniej składowej obwodowej c ( R u ) (rys. 6.9). Rys Wpływ szerokoci kanału b(r) na kształt łopatki przy tym samy przebiegu ( R ) Współczynnik powierzchni przekroju hydraulicznego kierownicy odrodkowej Czynn powierzchni przepływu przez kierownic na okrelonym promieniu R mona wyrazi wzorem: w którym współczynnik: A = π R b µ (6.54) z µ = K s (6.55) π R sinα c u 95
97 gdzie: zk - liczba łopatek kierownicy, s - grubo łopatki na promieniu R, α - kt łopatki na promieniu R. Na podstawie danych wynikajcych z praktyki konstruktorskiej kierownic mona przyjmowa, e µ (R) daje si opisa równaniem: µ k µ R + kµ R + k0µ = (6.56) gdzie: k µ, kµ, k0µ - stałe współczynniki równania wyznaczane z warunków: µ = dla R = R3 µ 3 µ = dla R = RP µ P µ = dla R = R4 µ 4 (6.57) Punkt P o współrzdnych ( µ P, RP ) stanowi punkt pomocniczy do okrelenia zalenoci (6.56). Promie R z załoenia ley w przedziale: P R (6.58) 3 R P R 4 Warto µ P, stosownie do przyjtego promienia R P, moe osiga róne wartoci, nawet znacznie mniejsze od µ 3 oraz µ 4, co jest zwizane z podanym przebiegiem (R) A, a tym samym i (R) c m. Wpływ na to ma grubo łopatki s P na tym promieniu, jak równie warto kta konstrukcyjnego łopatki α P i liczba łopatek z K. Take i w tym przypadku dogodniej jest stosowa bezwymiarowy współczynnik przekroju kierownicy µ = µ. µ 3 Wobec tego równanie (6.56) przyjmie posta: µ K µ R + Kµ R + K 0µ = (6.59) Składowa obwodowa prdkoci redniej cieczy w łopatkowej kierownicy odrodkowej W projektowaniu nieruchomych kanałów łopatkowych przyjmuje si, e przepływ cieczy odbywa si wzdłu linii zgodnych z przebiegiem łopatki reprezentowanym przez jej szkieletow, do której styczny jest wektor redniej teoretycznej prdkoci cieczy c. Istotna dla kształtowania układu łopatkowego 96
98 składowa obwodowa c u tworzy z wektorem c kt α, równowany ktowi łopatki w danym punkcie okrelonym promieniem R. Przyjto, e w ogólnym przypadku rozkład c ( R u ) jest najwyej wielomianem drugiego stopnia o postaci: = + + (6.60) cu kc R k C R k0c gdzie: k C k C, k0c, - stałe współczynniki równania wyznaczane z warunków: c = c dla R = R3 u 3u c = dla R = RP u c Pu (6.6) c = c dla R = R4 u Punkt P o współrzdnych ( c, R Pu R c P 4u ), spełniajcych zalenoci: 3 R P R 4 c c 3u Pu 4u (6.6) stanowi punkt pomocniczy lecy na linii (6.60), który jest tak dobrany, aby zapewniał podany gradient zmian teoretycznej składowej redniej obwodowej c wzdłu promienia R. W praktyce wygodniej jest posługiwa si bezwymiarow składow redniej cu prdkoci obwodowej c u =. c3u Wobec tego równanie (6.60) przyjmie posta: = + + (6.63) cu K C R K C R K 0C u Kt konstrukcyjny łopatki kierownicy Z równania cigłoci przepływu przez kierownic odrodkow: = π = = µ (6.64) Qk R3 b3 µ 3 c3m π R b µ cm π R4 b4 4 c4m po podstawieniu odpowiednich zalenoci kinematycznych zapisanych wzorem ogólnym o postaci: cu = tg(90 α ) (6.65) c m 97
99 otrzymuje si nastpujc zaleno słuc do wyznaczenia funkcji α ( R ) : tg(90 α ) = R b µ cu tg(90 α ) (6.66) Uwzgldniajc w (6.66) bezwymiarowe równania opisujce wielkoci b µ, c wynikajce odpowiednio z (6.5), (6.56) oraz (6.63), otrzymuje si:, u tg(90 α ) = ( K7α R + K6 α R + K5 α R + K4 α R + (6.67) + K R + K R + K R) tg(90 α ) 3 3α α α 3 Funkcja α ( R ) decyduje o przebiegu szkieletowej łopatki kierownicy od- rodkowej i jest równie wykorzystywana do wyznaczania zmiennoci gruboci łopatki s (R) na podstawie zalenoci (6.9) Współrzdne biegunowe szkieletowej łopatki kierownicy odrodkowej Szkieletowa łopatki kierownicy jest projektowana metod punktow, przy czym połoenie kadego punktu jest okrelone współrzdnymi biegunowymi ( R, θ ). Biorc pod uwag, e elementarnemu przyrostowi d R na promieniu R odpowiada przyrost kta d θ, to zgodnie z przyjtymi na rys. 6.0 oznaczeniami mona zapisa: tg(90 R dθ α ) = dr 3 (6.68) Rys Współrzdne biegunowe ( R, θ ) szkieletowej łopatki kierownicy odrodkowej i teoretyczna kinematyka przepływu 98
100 Uwzgldniajc w zalenoci (6.68), e funkcja tg (90 α ) jest okrelona równaniem (6.66), otrzymuje si: d θ = tg ( 90 α b µ c a po podstawieniu (6.4), (6.3) oraz (6.) wraenie (6.3) przyjmie posta: 3 ) u dr dθ = tg 90 α ) [( K R + K R + K ) ( 3 b b 0b K R + K R + K ) ( K R + K R + K )] dr ( µ µ 0µ C C 0C (6.69) (6.70) Całkujc zwizek (6.70) w granicach od R = 3 do R, otrzymuje si równanie okrelajce zaleno θ (R ) : θ 7 6θ 6 5θ 5 4θ K θ ( R ) + K θ ( R ) + K θ ( R ) + K0 θ ( R ( R ) = tg(90 α ) [ K ( R ) + K ( R ) + K ( ) + 3 R 3 )] (6.7) Łopatka osiga maksymalny kt θ = θmax dla R = R4. Natomiast kt pokrycia łopatek kierownic wynosi: π ε = θ (6.7) max WARIANT II Przyjta zmiana krtu przepływu redniego W niniejszej metodzie zasady wyznaczania zmiany szerokoci kanału, czyli R µ R s analogiczne jak w metodzie poprzedniej. funkcji b ( ) oraz funkcji ( ) Rónica polega na tym, e zamiast c u ( R) promienia. Przyjmuje si, e funkcja K ( R) z K, gdzie: zakładana jest zmiana krtu w funkcji K = R (6.73) c u jest, co najwyej, wielomianem stopnia drugiego Zmiana krtu cieczy w funkcji promienia odrodkowej kierownicy łopatkowej Przyjmuje si, e zmiana składowej obwodowej z zasad: c u dokonuje si zgodnie 99
101 K = R (6.74) Przyjto, e w ogólnym przypadku rozkład K ( R ) jest wielomianem drugiego stopnia o postaci: gdzie: k K kk, k0k c u K kk R + kk R + k0k = (6.75), - stałe współczynniki równania wyznaczane z warunków: R = R K = K 3 dla 3 R = R K = K P dla P (6.76) Współrzdne ( K, R P P R = R K = K 4 dla 4 ) punktu P spełniaj zalenoci: R K 3 R P R 4 (6.77) K. 3 P K 4 Punkt P jest punktem pomocniczym lecym na linii (6.75) i jest tak dobrany, aby zapewniał podany gradient zmian składowej obwodowej K wzdłu promienia R. Rys. 6.. Przykładowa zmiana krtu w funkcji promienia łopatkowej kierownicy odrodkowej 00
102 W praktyce wygodniej jest posługiwa si bezwymiarow wielkoci krtu K K =. K3 Wobec tego równanie (6.75) przyjmie posta: K K K R + KK R + K 0K = (6.78) Kt konstrukcyjny łopatki kierownicy odrodkowej Z równania cigłoci przepływu (6.64) przez kanał midzyłopatkowy kierownicy odrodkowej, po uwzgldnieniu odpowiednich zalenoci kinematycznych zapisanych w postaci ogólnej wzorem: oraz (6.74): cu = tg(90 α ) (6.79) c m K = R wynika zaleno słuca do wyznaczenia funkcji α ( R ) w postaci: c u tg (90 α ) = b µ K tg(90 α ) (6.80) na podstawie której, przy pomocy (6.9), jest równie wyznaczana zmienno gruboci łopatki kierownicy odrodkowej s (R). Uwzgldniajc w zalenoci (6.80) bezwymiarowe równania opisujce wielkoci b, µ, K opisane odpowiednio zalenociami (6.4), (6.3) oraz (6.74), mona zapisa: tg(90 + K α α ) = ( K R + K α 6α R 6 R + K + K 0α 5α R 5 ) tg(90 + K 4α α ) 3 R K 3α R Współrzdne biegunowe szkieletowej łopatki kierownicy odrodkowej 3 + (6.8) Szkieletowa łopatki kierownicy jest projektowana metod punktow, przy czym połoenie kadego punktu jest okrelone współrzdnymi biegunowymi ( R, θ ). Biorc pod uwag, e elementarnemu przyrostowi d R na promieniu R odpowiada przyrost kta d θ, to zgodnie z przyjtymi na rys. 6.0 oznaczeniami mona zapisa: 0
103 R dθ tg(90 α ) = (6.8) dr Uwzgldniajc w (6.8), e funkcja tg (90 α ) okrelona jest równaniem (6.79), otrzymuje si: d θ = tg ( 90 α b µ K 3 ) dr R a po podstawieniu (6.4), (6.3) oraz (6.73) wyraenie (6.83) przyjmie posta: dθ = tg 90 α ) [( K R + K R + K ) ( 3 b b 0b K R + K R + K ) ( K R + K R + K )] ( µ µ 0µ K K 0K dr R (6.83) (6.84) Całkujc zwizek (6.84) w granicach od R = 3 do R, otrzymuje si równanie okrelajce zaleno θ (R ) : θ ( R) = tg( α 3 ) [ K 6θ ( R ) + K5 θ ( R ) + K 4θ ( R ) K3 θ ( R ) + K θ ( R ) + K θ ( R ) + K 0 ln R] 3 (6.85) + θ Łopatka osiga maksymalny kt θ = θ max K dla R = R4, natomiast kt pokrycia łopatek kierownicy wynosi: ε K π = θmax K (6.86) z K 6.4. Przewał i łopatkowa kierownica dorodkowa Kinematyka przepływu przez przewał Łopatkowa kierownica dorodkowa obejmuje wraz z przewałem obszar zawarty midzy przekrojami kontrolnymi 4-6 (rys. 3.). Przy czym przewał jest ograniczony przekrojami 4-5, natomiast kierownica dorodkowa przekrojami 5-6. Podstawowym zadaniem przewału bezłopatkowego jest zmiana kierunku przepływu z odrodkowego na dorodkowy, w trakcie którego prdko c m w przekroju merydionalnym zmienia si zgodnie z równaniem cigłoci, 0
104 natomiast składowa obwodowa c u według stałego krtu (przy załoeniu przepływu potencjalnego). Ukształtowanie przewału, przy jak najmniejszych stratach hydraulicznych, powinno zapewni odpowiednie małe wymiary tego elementu. W pompach wielostopniowych stosuje si najczciej przewały bezłopatkowe, w których ciecz przepływa w przestrzeni bezłopatkowej od wylotu kierownicy odrodkowej do wlotu kierownicy dorodkowej. Dla stałej szerokoci kanału c m5 = cm6, przy załoeniu braku tarcia miedzy ciecz a ciankami przewału, kt napływu cieczy do przewału α 4 jest równy ktowi napływu do kierownicy dorodkowej α 5. W przypadku zmiany szerokoci kanału w przekroju merydionalnym kt na wlocie do kierownicy dorodkowej okrela zaleno: b tgα = tgα (6.87) b5 Uwzgldnienie tarcia cieczy o cianki kanału o długoci l p mierzonej w przekroju merydionalnym na rodkowej linii prdu powiksza kt napływu do kierownicy dorodkowej zgodnie z zalenoci: λ tgα5 = b 4tgα4 + l 4 p b Najczciej przyjmowana warto współczynnika strat λ = 0, Straty przepływu przez przewał 5 (6.88) Bezwymiarowe równanie bilansu energii dla przekrojów 4-5 (rys. 3.) jest okrelone wzorem: c c ψ (6.89) = ψ ψ s4 5 u u gdzie: ψ 5 - bezwymiarowy wskanik cinienia statycznego w przekroju kontrolnym 5, c - prdko cieczy w przekroju 5 na wlocie do dorodkowej kie- ψ s4 5 5 rownicy łopatkowej, - straty hydrauliczne w przewale bezłopatkowym okrelone za- lenoci: c ψ s4 5 = ζ 4 5 (6.90) u 4 03
105 gdzie: ζ współczynnik strat hydraulicznych w przewale przedstawiony na rys. 6.. Rys. 6.. Współczynnik strat hydraulicznych ς / ) w przewale bezłopatkowym ( 4 5 N Przebieg krzywych ς / ) dotyczy pomp o wyróniku szybkobieno- ci w zakresie n = q ( 4 5 N Uwzgldniajc w równaniu (6.90) zalenoci (.) i (.) oraz dokonujc przekształce tych zalenoci, otrzymuje si równanie definiujce bezwymiarowy wskanik strat hydraulicznych w przewale: ψ D b µ s = ζ k (6.9) D4 b4 µ 4 sinα 4 a bezwymiarowy wskanik przyrostu cinienia statycznego jest okrelony wzorem: ψ 4 5 = ψ = 5 ψ 4 k D4 ψ s 4 5 D4 b D5 b 4 5 D b 4 b µ µ 4 sinα 4 µ 4 sinα 4 µ 5 sinα5 (6.9) Kinematyka przepływu przez łopatkow kierownic dorodkow Uwzgldniajc skoczon grubo łopatek kierownicy dorodkowej, kt napływu cieczy na łopatki kierownicy wynosi: 04 tg α = (6.93) 6 χ66tgα 5 gdzie: 6 - współczynnik przesłonicia przekroju spowodowany skoczon gruboci łopatek:
106 6 = t 6 t6 s6 sinα 6 (6.94) t6 - podziałka na wlocie łopatek kierownicy dorodkowej: πd = (6.95) 6 t6 z KD zkd - liczba łopatek kierownicy dorodkowej, χ - współczynnik uwzgldniajcy straty tarcia w przewale oraz nie- 6 równomierny rozkład prdkoci, najczciej przyjmowany χ =, 6 3. Rzadko spotyka si rozwizania konstrukcyjne w postaci przewału łopatkowego. Kierownice z przewałem łopatkowym stosuje si w dwóch rozwizaniach: łopatki kierownic odrodkowej i dorodkowej stanowi cało; jest to rozwizanie charakteryzujce si wiksz sprawnoci ni w przypadku przewału bezłopatkowego, ale zdecydowanie drosze, kierownica odrodkowa i dorodkowa stanowi oddzielne czci, ale kanały dorodkowe s przedłueniem kanałów odrodkowych. Łopatkowa kierownica dorodkowa ograniczona przekrojami 5-6 stanowi element, którego głównym zadaniem jest doprowadzenie cieczy do wirnika nastpnego stopnia z moliwie najmniejszymi stratami hydraulicznymi. Wypływajca ciecz z kierownicy dorodkowej powinna wpływa na wirnik nastpnego stopnia pod ktem α = 90 (bez zawirowania wstpnego). Aby to uzyska nale- y krawdzie wylotowe łopatek doprowadzi moliwie najbliej krawdzi łopatek wieca łopatkowego wirnika. Kt konstrukcyjny łopatek na wylocie z kierownicy dorodkowej moe wówczas wynosi 90. W przypadku cofnitych krawdzi wylotowych łopatek przyjmuje si kt konstrukcyjny łopatek α Schemat konstrukcji kierownicy dorodkowej z zaznaczonymi głównymi wymiarami przedstawiono na rys
107 Rys Główne wymiary kierownicy dorodkowej Parametry wlotowe kierownicy dorodkowej s cile powizane z parametrami wylotowymi z kierownicy odrodkowej, natomiast parametry wylotowe s powizane z geometri wirnika nastpnego stopnia. Projektujc kierownic dorodkow, naley przyj: rednic wlotu na łopatki D 5, rednic wewntrzn kierownicy D 6, szeroko kierownicy na wlocie b 5, szeroko kierownicy na wylocie b 6, liczb łopatek kierownicy z KD, grubo łopatek na wlocie s 5 i wylocie s 6, kt wlotowy łopatki α 5, kt wylotowy łopatki α 6 = Kierownice dorodkowe s najczciej konstruowane jako elementy z łopatkami łukowymi o gruboci zapewniajcej płynn zmian przekroju kanału. Najczciej do wyznaczenia kształtu łopatek stosuje si metod jednołukow, w której: promie łopatki kierownicy dorodkowej: R p D D = (6.96) 4 α 5 6 ( D cosα D cos ) promie rodkowej dla promienia łopatki:
108 R sr D5 = + Rp D5R p cosα (6.97) 5 4 redni prdko na wlocie kierownicy dorodkowej okrela si z nastpujcych zalenoci: składowa merydionalna: c µ Q 5 K m5 = (6.98) πd5b5 gdzie: µ 5 - współczynnik przesłonicia wlotu na łopatki kierownicy dorodkowej: µ = 5 πd teoretyczna składowa obwodowa: teoretyczna prdko bezwzgldna: 5 πd5 zkds sinα m (6.99) c cu 5 = (6.00) tgα c = c m + c (6.0) 5 5 u5 redni prdko na wylocie kierownicy dorodkowej wyznacza si z poniszych wzorów: składowa merydionalna: c µ Q 6 K m6 = (6.0) πd6b6 gdzie: µ 6 - współczynnik przesłonicia wlotu na łopatki kierownicy dorodkowej: µ = 6 πd teoretyczna składowa obwodowa: teoretyczna prdko bezwzgldna: 6 πd6 zkds sinα m (6.03) c cu 6 = (6.04) tgα 07
109 c = c m + c (6.05) 6 6 u6 Kinematyk przepływu jednowymiarowego przez łopatkow kierownic do- rodkow przedstawiono na rys Rys Kinematyka przepływu przez łopatkow kierownic dorodkow Wlot - przekrój 5, wylot - przekrój 6 Zgodnie z rys. 6.4: kt natarcia cieczy na wlocie łopatki kierownicy: i (6.06) 5 = α 5 α 5 kt odchylenia strugi od kierunku łopatki na wylocie z kierownicy dorodkowej: ϑ = (6.07) 6 α 6 α Straty hydrauliczne w przepływie przez łopatkow kierownic dorodkow Bezwymiarowe równanie bilansu energii dla łopatkowej kierownicy dorodkowej ma posta: 08 c c ψ (6.08) = ψ ψ s5 6 u u gdzie: ψ 6 - bezwymiarowy wskanik cinienia statycznego w przekroju kontrolnym 6, c - prdko cieczy w przekroju 6 na wylocie z kierownicy dorodkowej, 6
110 ψ s5 6 - straty hydrauliczne w kierownicy okrelone zalenoci: c ψ s5 6 = ζ 5 6 (6.09) u gdzie: ζ współczynnik strat hydraulicznych okrelany z wykresu (rys. 6.5). 5 Rys Współczynnik strat hydraulicznych ς / ) w dorodkowej kierownicy łopatkowej ( 5 6 N Przebieg krzywych ς / ) dotyczy pomp o wyróniku szybkobieno- ci w zakresie n = q ( 5 6 N Uwzgldniajc w równaniu (6.09) zaleno (.) i (.) oraz dokonujc przekształce tych zalenoci, otrzymuje si równanie strat hydraulicznych w postaci: D b µ ψ s5 6 = ξ5 6φK D5 b5 µ 5 sinα5 (6.0) a bezwymiarowy wskanik przyrostu cinienia statycznego w kierownicy dorodkowej jest okrelony zalenoci: 09
111 ψ 5 6 = ψ ψ = 6 ζ K D5 b D6 b D D5 b b µ µ 5 sinα5 µ 5 sinα5 µ 6 sinα 6 (6.) 6.5. Metodyka analitycznego projektowania łopatkowej kierownicy dorodkowej W ramach doskonalenia metod projektowania pomp spełniajcych specjalne wymagania ruchowe opracowano [59] równie dwa sposoby kształtowania układów łopatkowych i kanałów kierownic dorodkowych. Metody te oparte s na: załoonym rozkładzie składowej obwodowej cieczy c u ( R) - wersja I, załoonym rozkładzie krtu (momentu iloci ruchu) K ( R) - wersja II. Obie metody daj dobre moliwoci kontroli kształtowania kanałów midzyłopatkowych dla okrelonego sposobu oblicze przekroju merydionalnego oraz kontroli zmian wybranych parametrów kinematycznych. Poniewa zalenoci wynikajce z wyej wymienionych metod s stosowane w procedurze projektowania pomp spełniajcych specjalne wymagania ruchowe, charakteryzujcych si optymalnym kształtem krzywej sprawnoci ( Q) poboru mocy P ( Q) dla danej charakterystyki przepływu H ( Q) η oraz, w rozdziale tym zostały podane załoenia, z jakich skorzystano do ich wyprowadzenia. Ostateczne postacie wzorów zamieszczono w algorytmie metody. WERSJA I dany rozkład teoretycznej składowej obwodowej R c u cieczy ( ) Szeroko kanału hydraulicznego w przekroju merydionalnym łopatkowej kierownicy dorodkowej Podobnie jak w przypadku odrodkowej kierownicy łopatkowej równie zmian szerokoci b kanału kierownicy dorodkowej w funkcji promienia R mona przedstawi analogicznym równaniem postaci: b k br + k br + k0b = (6.) gdzie: k b k b, k0b, - stałe współczynniki równania wyznaczane z warunków: 0
112 b = dla R = R5 b 5 b = dla R = RP b P (6.3) b = dla R = R6 b 6 Rys Zarys przekroju merydionalnego kierownicy dorodkowej i zaleno b (R) Punkt P (rys. 6.6) o współrzdnych ( b, R R P 5 R P R 6 b 5 b P b 6 P ), które spełniaj zalenoci: (6.4) stanowi punkt pomocniczy lecy na linii (6.), który jest tak dobrany, aby otrzymany w rezultacie tego przekrój kanału z uwzgldnieniem współczynnika przesłonicia przekroju przez łopatki µ zapewniał podany gradient zmian prdkoci merydionalnej c m wzdłu promienia R, wyznaczanej z równania: QK cm = (6.5) π R b µ Spotykane s równie rozwizania konstrukcyjne, w których: b > bp > (6.6) 5 b 6
113 W praktyce wygodniej jest posługiwa si bezwymiarow szerokoci kanału b R kierownicy b = oraz bezwymiarowym promieniem kierownicy R =. b 5 Wobec tego równanie (6.) przyjmie posta: b K br + K br + K0b = (6.7) Dla najczciej stosowanej w praktyce prostoliniowej zalenoci b (R) musi by spełniony warunek: RP bp = + ( b6 ) (6.8) R natomiast dla kanału o stałej szerokoci b = b = bp = b = Współczynnik zacienienia powierzchni przekroju przepływowego dorodkowej kierownicy łopatkowej Czynn powierzchni przekroju przepływowego przez kierownic na okre- lonym promieniu R mona wyrazi wzorem: w którym współczynnik: A = π R b µ (6.9) z µ = KD s (6.0) π R sinα gdzie: zkd - liczba łopatek kierownicy, s - grubo łopatki na promieniu R, α - kt łopatki na promieniu R. Na podstawie danych wynikajcych z praktyki konstrukcyjnej dorodkowych kierownic łopatkowych mona przyjmowa, e µ (R) daje si opisa równaniem: µ k µ R + kµ R + k0µ = (6.) gdzie: k, k µ k µ - stałe współczynniki równania wyznaczane z warunków: µ, 0 R 5 µ = dla R = R5 µ 5 µ = dla R = RP µ P (6.) µ = dla R = R6 µ 6
114 Punkt P o współrzdnych ( µ P, RP ) stanowi punkt pomocniczy do okrelenia zalenoci (6.). Promie R z załoenia ley w przedziale: R P 5 R P R 6 (6.3) natomiast warto µ P, w zalenoci od przyjtego promienia R P, moe osiga wartoci mniejsze od µ 5, co jest zwizane z odpowiedni gruboci łopatki na tym promieniu, wynikajc równie z wartoci kta α. Najprociej wielko µ P jest oszacowa z wzoru (6.0) dla ustalonej ju szerokoci b P i wstpnie załoonego rozkładu c m (R) przyjtego na podstawie znanych wartoci c 5 m oraz c 6 m. Równie i w tym przypadku dogodniej jest stosowa bezwymiarowy współczynnik przekroju kierownicy µ = µ. µ 5 Wobec tego równanie (6.) przyjmie posta: µ K µ R + Kµ R + K 0µ = (6.4) Kontrola przebiegu A (R ), i jednoczenie (R ), umoliwia ocen poprawnoci załoonego rozkładu µ (R ) Składowa obwodowa redniej prdkoci cieczy w dorodkowej kierownicy łopatkowej Równie w przypadku kierownicy dorodkowej przyjto, e rozkład składowej obwodowej c ( R u ) jest w ogólnym przypadku opisany co najwyej wielomianem drugiego stopnia: c m cu kc R + k C R + k0c = (6.5) gdzie: k C k C, k0c, - stałe współczynniki równania wyznaczane z warunków: c = c dla R = R5 u 5u c = dla R = RP u c Pu c = c dla R = R6 u 6u Punkt P o współrzdnych ( c, R Pu R c P ), spełniajcych zalenoci: 5 R P R 6 5u cpu c6u (6.6) (6.7) 3
115 stanowi punkt pomocniczy lecy na linii (6.5) i jest tak dobrany, aby zapewni podany gradient zmian składowej redniej prdkoci obwodowej c wzdłu promienia R. W praktyce wygodniej jest posługiwa si wielkociami bezwymiarowymi odniesionymi do odpowiednich wielkoci w przekroju wlotowym 5. Przyjmujc, e bezwymiarowa składowa obwodowa: to równanie (6.5) przyjmie posta: c c u = (6.8) c u 5u cu K CR + K C R + K0C = (6.9) Dla wykorzystywanej w praktyce, prostoliniowej zalenoci c ( R u ) musi by spełniony warunek: c6u cpu = ( RP ) (6.30) R Kt konstrukcyjny łopatki kierownicy dorodkowej Z równania cigłoci przepływu przez dorodkow kierownic łopatkow (6.), po uwzgldnieniu odpowiednich zalenoci kinematycznych zapisanych w postaci ogólnej wzorem: 6 cu = tg(90 α ) (6.3) c m zostało okrelone równanie (6.3) słuce do wyznaczenia funkcji α ( R) : tg(90 α ) = R b µ cu tg(90 α ) (6.3) Uwzgldniajc w (6.3) bezwymiarowe równania opisujce wielkoci b, µ, c wynikajce odpowiednio z (6.08), (6.7) oraz (6.7), mona zapisa: u tg( 90 α ) = ( K 7α R + K6 α R + K5 α R + K 4α R + (6.33) 3 + K 3α R + K α R + K α R) tg(90 α 3 ) Funkcja α ( R) decyduje o przebiegu szkieletowej łopatki kierownicy do- rodkowej i jest równie wykorzystywana do wyznaczania zmiennoci gruboci łopatki s (R) na podstawie zalenoci (6.0). 5 u 4
116 Współrzdne biegunowe szkieletowej łopatki kierownicy dorodkowej Szkieletowa łopatki kierownicy dorodkowej jest projektowana metod punktow, przy czym połoenie kadego punktu jest okrelone współrzdnymi biegunowymi ( R, θ ). Biorc pod uwag, e elementarnej zmianie promienia d R na promieniu R odpowiada przyrost kta d θ, to zgodnie z przyjtymi na rys. 6.7 oznaczeniami mona zapisa: R dθ tg(90 α ) = (6.34) dr Rys Współrzdne biegunowe ( R, θ ) szkieletowej łopatki kierownicy dorodkowej Uwzgldniajc w (6.34), e funkcja tg (90 α ) jest okrelona równaniem (6.3), otrzymuje si: d θ = tg ( 90 α = b µ c 5 ) u dr (6.35) a po podstawieniu (6.7), (6.4) oraz (6.9) wyraenie (6.35) przyjmie posta: dθ = tg 90 α ) [( K R + K R + K ) ( 5 b b 0b K R + K R + K ) ( K R + K R + K )] dr ( µ µ 0µ C C 0C ) (6.36) 5
117 Całkujc zwizek (6.36) w granicach od R do R, otrzymuje si równanie okrelajce zaleno θ (R ) : θ ( R ) = tg(90 α ) [ K ( R ) + K ( R ) + K ( ) = 5 6θ 5θ 4θ R K θ ( R ) + K θ ( R ) + K θ ( R ) + K 0θ ( R )] (6.37) Łopatka osiga maksymalny kt θ = θ max dla R = R KD 6. Natomiast kt pokrycia łopatek kierownicy wynosi: π ε KD = θmax KD (6.38) z WERSJA II Załoony rozkład krtu (moment iloci ruchu) K ( R) W metodzie, według załoonego rozkładu krtu, zasady wyznaczania zmiany szerokoci kanału, czyli funkcji b (R) oraz funkcji µ (R) s analogiczne jak w metodzie opartej na załoonym rozkładzie składowej redniej prdkoci obwodowej cieczy c u (R). Rónica polega na tym, e zamiast c ( R u ) jest zakładana zmiana krtu w funkcji promienia K ( R ) wzór (6.39). Przyjto, e funkcja K ( R) jest co najwyej wielomianem drugiego stopnia Zmiana krtu cieczy w funkcji promienia dorodkowej kierownicy łopatkowej Przyjto, e równanie opisujce zmian krtu cieczy ma posta: KD K kk R + kk R + k0k = (6.39) gdzie: k k k k, k0k, - stałe współczynniki równania wyznaczane z warunków: R = R K = K 5 dla 5 R = R K = K P dla P (6.40) R = R K = K 6 dla 6 Punkt P o współrzdnych ( K, R ) spełniajcych zalenoci: P P 6
118 R K 5 R P R 6 5 K P K 6 (6.4) stanowi punkt pomocniczy, lecy na linii (6.8), i jest tak dobrany, aby zapewni podany gradient zmian krtu K wzdłu promienia R. Rys Przykładowa zmiana krtu w funkcji promienia kierownicy dorodkowej W praktyce wygodniej jest posługiwa si bezwymiarow wielkoci K krtu K =. K5 Wobec tego równanie (6.39) przyjmie posta: K K K R + KK R + K0K = (6.4) Kt konstrukcyjny łopatki kierownicy dorodkowej Z równania cigłoci przepływu przez dorodkow kierownic łopatkow: QK = π R5 b5 µ 5 c5m = π R b µ cm = π R6 b6 µ 6 c6m (6.43) 7
119 po uwzgldnieniu odpowiednich zalenoci kinematycznych zapisanych w postaci ogólnej wzorem: oraz równania: cu = tg(90 α ) (6.44) c m K = R (6.45) c u otrzymuje si zaleno nastpujc, słuc do wyznaczenia funkcji α ( R) : tg (90 α ) = b µ K tg(90 α ) (6.46) na podstawie której, przy pomocy (6.0), jest równie wyznaczana zmienno gruboci łopatki kierownicy dorodkowej s (R). Uwzgldniajc w zalenoci (6.46) bezwymiarowe równania opisujce wielkoci b, µ, K, okrelone odpowiednio przez (6.7), (6.4) oraz (6.4), mona zapisa: tg( 90 α ) = ( K R + K R + K R + K R 6α 5α 4α 5 3α + K R + K R + K 0 ) tg(90 α 5 ) α α Współrzdne biegunowe łopatki kierownicy dorodkowej α 3 + (6.47) Szkieletowa łopatki kierownicy dorodkowej jest projektowana metod punktow, przy czym połoenie kadego punktu jest okrelone współrzdnymi biegunowymi ( R, θ ). Biorc pod uwag, e elementarnej zmianie promienia d R na promieniu R odpowiada przyrost kta d θ, to zgodnie z przyjtymi na rys. 6.7 oznaczeniami mona zapisa: R dθ tg(90 α ) = (6.48) dr Uwzgldniajc w (6.46), e funkcja tg (90 α ) jest okrelona równaniem (6.03), otrzymuje si: d θ = tg ( 90 α b µ K 3 ) dr R (6.49) a po podstawieniu (6.7), (6.0) oraz (6.4) wyraenie (6.49) przyjmie posta: 8
120 dθ = tg 90 α ) [( K R + K R + K ) ( 5 b b 0b (6.50) dr ( K µ R + Kµ R + K 0µ ) ( K K R + KK R + K 0K )] R Całkujc zwizek (6.50) w granicach od R do R, otrzymuje si równanie okrelajce zaleno θ ( R) : θ ( R) = tg(90 α 5 ) [ K 6θ ( R ) + K5 θ ( R ) + K 4θ ( R K3 θ ( R ) + K θ ( R ) + K θ ( R ) + K 0θ ln R] 3 (6.5) Łopatka osiga maksymalny kt θ = θ max dla R = R KD 6, natomiast kt pokrycia łopatek kierownicy wynosi: π ε KD = θmax KD (6.5) z 6.6. Kolektory zbiorcze Kolektory zbiorcze stanowi nieruchomy kanał przepływowy w korpusie tłocznym ostatniego stopnia pompy (3.5 poz. 7). Najczciej s stosowane dwa typy kolektorów zbiorczych: spiralne kanały zbiorcze, kolektory o stałym przekroju Spiralne kanały zbiorcze Spiralne kanały zbiorcze s usytuowane bezporednio za wirnikiem. Natomiast kolektory o stałym przekroju s najczciej poprzedzone kierownic od- rodkow. Zadaniem spiralnych kanałów zbiorczych jest: zbieranie cieczy wypływajcej z całego wirnika i kierowanie jej do króca tłocznego pompy, zamiana energii kinetycznej na energi cinienia z moliwie najmniejszymi stratami hydraulicznymi. Rodzaje przekrojów spiralnych kanałów zbiorczych zostały przedstawione na rys = KD 9
121 Rys Przekroje poprzeczne zarysów spiralnych kanałów zbiorczych [7, 39] Najczciej w pompach jednostopniowych s stosowane zarysy kołowe a i b oraz trapezowy c. Natomiast w pompach wielostopniowych znajduje zastosowanie zarys o kształcie d. Publikowane w literaturze [7, 39] metody projektowania spiralnych kanałów zbiorczych zakładaj niezmienno krtu przepływajcej cieczy lub jej stał prdko redni. Metoda oparta na zasadzie niezmiennoci krty zakłada, e: K = cu r = const (6.53) Oznacza to, e prdko (rys. 6.0). c u maleje w miar oddalania si od osi pompy Rys Spiralny kanał zbiorczy i dyfuzor wylotowy [35] 0
122 rednia prdko przepływu nie jest stała we wszystkich przekrojach spirali, lecz zmniejsza si w miar wzrostu kta rodkowego. Zasada stałego krtu obowizuje dla cieczy doskonałych, tj. bez uwzgldnienia tarcia. Wystpujce straty mieszania cieczy i tarcia o cianki kanału powoduje ' zmniejszenie prdkoci c u < cu. W zwizku z tym powierzchnie przekrojów poprzecznych spirali A naley powikszy. Pfleiderer [7, 39] zaproponował wzór empiryczny na zwikszenie przekroju: λ π A = Rbsr d (6.54) 8 80 gdzie: λ 0, 04 - współczynnik oporu hydraulicznego, bsr - rednia szeroko w przekroju, zmieniajca si wzdłu promienia kanału spiralnego. Zaleca si, aby kt rozwarcia dyfuzora wylotowego δ (rys. 6.0) nie przekraczał. Maksymalne wartoci kta rozwarcia δ o max zostały przedstawione na (rys. 6.). 0 Rys. 6.. Zaleno kta rozwarcia δ max dyfuzora od prdkoci c sp [7] W metodzie opartej na zasadzie stałej prdkoci zakłada si stał prdko redni cieczy wzdłu całej długoci spirali. W zwizku z tym moe by stosowana do oblicze kanału spiralnego o dowolnym przekroju poprzecznym. redni prdko w spirali oblicza si z wzoru:
123 Przebieg zmian współczynnika c = K gh (6.55) sp csp N K csp w funkcji wyrónika szybkobienoci n q przedstawiono na rys Po okreleniu wartoci c sp wyznacza si pola przekroju spirali dla dowolnego kta rodkowego z wzoru: A sp Q = (6.56) c W metodach tych brak jest analitycznych sposobów obliczania parametrów przepływowych cieczy. Dotyczy to głównie wyznaczania przyrostu cinie statycznych oraz strat przepływowych, bez znajomoci których niemoliwa jest optymalizacja projektu. Metoda obliczania strat hydraulicznych w spiralnych kanałach zbiorczych opracowana została przez Kuczewskiego i omówiona w [35] Przepływ przez spiralny kanał zbiorczy W przypadku gdy spiralny kanał zbiorczy jest umieszczony bezporednio za wirnikiem, co czsto spotyka si w konstrukcjach pomp, to parametry cieczy na wlocie do kolektora s identyczne z parametrami na wyjciu z wirnika. Jeeli byłaby to kierownica bezłopatkowa, to wówczas wszystkie wyprowadzone poni- ej wzory pozostan te same, natomiast parametry pocztkowe naley przyj takie, jakie wystpuj na wyjciu z kierownicy. Na rys. 6. pokazano schemat spiralnego kanału zbiorczego o przekroju kołowym. Przekrój tego spiralnego kanału ronie równomiernie, poczwszy od zera w miejscu oznaczonym na rys. 6. ktem 0 i odległym od osi wirnika o promie R j a do wylotu. Miejsce wyznaczone współrzdnymi R j i 0 okrela połoenie tak zwanego jzyczka spiralnej. Biecy promie spirali w przekroju przeprowadzonym pod ktem oznaczono przez R. Przekrój czynny spirali w postaci koła, ewentualnie czciowo odcitego ciciw, rozpoczyna si od promienia jzyczka spirali R. redni prdko w dowolnym przekroju oznaczono j przez c S, przy czym, biorc pod uwag niewielk krzywizn spirali, przyjmuje si, e ma ona kierunek obwodowy. sp
124 Rys. 6.. Schemat spiralnego kanału zbiorczego o przekroju kołowym i rozkład prdkoci w tym kanale Rzeczywisty przepływ przez kierownic bezłopatkow i spiralny kanał zbiorczy ma charakter złoony. Ciecz wypływa z wirnika z prdkoci c w sposób nierównomierny wzdłu obwodu. Na drodze, a do przekroju na promieniu R j, zachowuje si jak w kierownicy bezłopatkowej, to znaczy zarówno składowe obwodowe prdkoci, jak i merydionalne malej w pierwszym przyblieniu proporcjonalnie do stosunku promieni R j / R. W kierownicy bezłopatkowej nastpuje czciowe mieszanie i wyrównywanie si strug, postpujce dalej w przekrojach spirali. W przekroju R odpowiednie składowe prdkoci wynosz: j = R c j cu R j R (6.57) cmj cm R j Nastpnie droga czstek łagodnie odgina si w kierunku obwodowym w ten sposób, e stopniowo zanikaj składowe merydionalne prdkoci m c, a jednocze- nie ciecz wpływa do kanału o przekroju powikszonym zwykle spirale projektuje si tak, aby nastpiło tam zmniejszenie energii kinetycznej na rzecz wzrostu cinienia statycznego. Przyjmuje si, dla uproszczenia oblicze, e na przejciu do omawianego przekroju nastpi nagłe zmniejszenie składowych obwodowych 3
125 prdkoci z c na j c js na promieniu j R. Dalej w przekroju spirali rozkład prdkoci nie bdzie równomierny, ale wobec oddalania si torów czstek od osi, przy załoeniu zachowania stałego krtu, prdkoci obwodowe bd malały w przybli- eniu według prawa swobodnego wiru. Przebieg prdkoci obwodowych w przekroju A pokazano schematycznie na rys Rys Rozkład składowych prdkoci obwodowych w przekroju okrelonym ktem spiralnego kanału zbiorczego Jeli przez przekrój w kanale wyniesie: A przepływa wydatek cieczy Q c S = F A = πr Q, to rednia prdko (6.58) gdzie: r - promie przekroju spirali w przekroju A. Na rys. 6.4 pokazano przekrój przez spiral w dowolnym miejscu. Dla uproszczenia zapisów wzorów przy okrelaniu prdkoci c pominito wszystkie indeksy. js 4
126 zatem: Rys Przekrój przez kołowy spiralny kanał zbiorczy przeprowadzony pod dowolnym ktem Elementarny przekrój wynosi: da = EDBB' ED = A' C' = r sin Zakładajc d α jako małe, otrzymamy: ( AC + A' C' ) ED = r sinα BB' = r sinαdα ( α + dα ) elementarny wydatek płyncy przez pole da wyniesie: da = r sin αdα (6.59) dq = cda (6.60) gdzie: c - składowa obwodowa prdkoci w przekroju da. 5
127 Załoono, e zmiana prdkoci obwodowych w przekroju rozpatrywanym nastpuje według równania krtu: Na podstawie rys. 6.4 mona napisa: Rc u = const = T R j R = R + r r cosα = r + cosα j (6.6) r Z równa (6.59), (6.60) i (6.6) otrzymuje si: dq = rt Q = rt π 0 R r R r j j sin α dα + cosα sin α dα + cosα Dla rozwizania całki wykorzystano nastpujce przekształcenia: (6.6) R j + = a (6.63) r Q = rt J (6.64) skd: cos J = (6.65) a cosα a cos α = z (6.66) sin αd α = dz cos α = a z Po podstawieniu (6.66) do (6.65) otrzymano: (6.67) J = z + az + z ( a ) dz (6.68) 6
128 całkujc: mz + nz + p dz = mz z n dz + + p mz + nz + p po podstawieniu: + nz + p mz dz + nz + p (6.69) p otrzymano: J = z + ( a ) + az + z m = n = a p = a z ( a ) dz + az + + a ( a ) z dz + az + ( a ) (6.70) Oznaczajc pierwsz całk przez J : po podstawieniu: zatem: J dz J = (6.7) z ( a ) a z = t dz = dt = dt = t arcsint ( a ) = arcsin( cosα ) J = arcsin z (6.7) J = = z z arcsin p z dz + az + nz + p ( a ) ( 4mp n ) z mz dz + nz + p = co jest słuszne dla warunku p < 0 oraz 4mp n < 0 7
129 p = a a > a < 0 Biorc pod uwag, e: 4mp n = 4 < 0 az + J = arcsin a z acosα arcsin a a cosα ( a ) = (6.73) z + az + ( a ) = sinα ostateczna warto całki J wyraa si wzorem: J = sinα aarcsin( cosα ) 4 acosα a arcsin a cosα (6.74) Po dalszym przekształceniu: R j J = sinα + arcsin( cosα ) r + R j cosα R j R + j r arcsin + c r + r R j + cosα r Po podstawieniu granic całkowania otrzymuje si: π 0 (6.75) ( ) Q = π T R j R j R j + r + r (6.76) std okrela si stał T : Poniewa: T = π Q [ R j R j ( R j + r) + r ] R j c js = RC = T (6.77) 8
130 dla przekroju A i wydatku Q : c js = T R j = πr j Q [ R j R j ( R j + r) + r] (6.78) wydajno Q przepływajca przez przekrój A musi równa si wydajnoci wypływajcej z wirnika na czci jego obwodu odpowiadajcemu ktowi opasania 0 : ( 0 ) Q = cm (6.79) R b albo na wylocie z kierownicy bezłopatkowej: Q ( 0 ) b 3 = c R (6.80) Po podstawieniu do wzoru (6.78) otrzymuje si zaleno: c js mj cm R = πr j j ( ) 0 r + R j b r + R j (6.8) Chcc uzyska jak najwiksz sprawno pompy, naley dy do tego, aby wirnik na całym swoim obwodzie pracował w warunkach jednakowych i optymalnych; dodatkow korzyci bdzie wówczas redukcja działajcej na wirnik siły promieniowej. Na wirnik działa bdzie wyłcznie siła od ciaru i niewywa- enia. Warunek ten zostanie osignity, jeli tu za wirnikiem na obwodzie panowa bdzie jednakowe cinienie statyczne p, a towarzyszy temu musz oczywicie jednakowe prdkoci i ich kty na obwodzie zewntrznym i wewntrznym wieca łopatkowego. To z kolei moe by spełnione wówczas, jeli na drodze poszczególnych strumieni wypływajcych z kanałów łopatkowych wirnika, a do wylotu ze spirali, zachodzi bd jednakowe straty przepływu Straty hydrauliczne w spiralnym kanale zbiorczym Straty hydrauliczne w spirali dla przedstawionego obrazu przepływu mona okreli jako sum strat czciowych. Współczynniki strat ξ, ξ 3, ξ 4 wyznaczono na podstawie oblicze odtworzeniowych zaprojektowanych i zbadanych pomp oraz wentylatorów [34, 35]. 9
131 ) Strata przepływu na skutek odgicia strugi i likwidacji merydionalnej prdkoci c : m ρ ps = ξ m cm (6.8) gdzie: ξ - współczynnik strat ( ξ = 0, ), m - współczynnik nierównomiernoci strugi na wylocie z wirnika. ) Strata nagłego uskoku prdkoci na promieniu R j z wartoci c na c js (rys. 6.3): p S = ρ,9 ( c c ) 0 j js j (6.83) gdzie: 0, 9 - współczynnik zmniejszenia strat przyjty na podstawie bada dowiadczalnych. 3) Straty zwizane z energi wirów wzbudzanych w kanale spirali oraz energi pewnej iloci cieczy krcej stale wokół wirnika wewntrz obwodu πr : 3 j ρ p = ξ c (6.84) S 3 js gdzie: ξ 3 - współczynnik strat ( ξ = 0, 3 3 ). 4) Strata w dyfuzorze wylotowym od przekroju 3 do 4 (rys. 6.), to znaczy od zakoczenia właciwej spirali do wylotu z pompy: p S 4 ρ = ξ ( ) 4 c3 c4 (6.85) gdzie: ξ 4 - współczynnik strat ( ξ 4 = 0,4 0, 5 ). Całkowita strata przepływu spirali jest sum strat czstkowych: p = p + p + p + p (6.86) S S S S 3 S Metoda wyznaczania głównych wymiarów spirali Jeli straty w poszczególnych strugach maj by jednakowe i jednakowe maj by prdkoci wypływu z wirnika, to równie, jak wynika ze wzoru (6.86), musz by spełnione warunki: 30
132 c j = const c js = const zatem zgodnie ze wzorem (6.8) musi zachodzi zaleno: π R ( φ φ ) c R b m 0 rφ rφ + + Rj Rj j Po podzieleniu obu stron przez wielkoci stałe: c R b m πr j = const otrzymuje si: φ φ rφ + + R 0 j r φ R j = const (6.87) Promie biecy rodków przekroju kołowych spirali (rys. 6.4) wynosi: R S R j + r = (6.88) Po podstawieniu do wzoru (6.87) wartoci r obliczanej ze wzoru (6.88) otrzymuje si ostatecznie warunek: R Sφ R j φ φ0 = const = C RSφ R j (6.89) Celem wyznaczenia stałej C przyjmuje si redni prdko w kocowym = π : przekroju spirali ( ) Q c S π = πr π π = 0 = 0 πrc b π π Qπ m Q (6.90) 3
133 skd: c S π 0 Q π = πr π r π = 0 Q π π c S π (6.9) 3 R S π R j + rπ Po podstawieniu w równaniu (6.89) wartoci: = (6.9) = π i R S = R S π otrzymuje si poszukiwan stał C. Nastpnie, zakładajc dowolne kty w obszarze od 0 do = π, z równania (6.89) znajduje si dla tych któw współrzdne biegunowe krzywej rodków przekrojów spirali R S i z kolei z równania (6.88) promienie tych przekrojów r Kolektory o stałym przekroju Kolektory o stałym przekroju s stosowane zarówno w pompach jednostopniowych, jak i w pompach wielostopniowych w przypadkach, w których s poprzedzone kierownic odrodkow. Sprawno hydrauliczna kolektorów o stałym przekroju jest mniejsza od sprawnoci hydraulicznej spiralnych kanałów zbiorczych. W pompach wielostopniowych nie ma to wikszego znaczenia, poniewa energia kinetyczna cieczy w kolektorze zbiorczym jest mała w stosunku do jego energii potencjalnej (cinienia) [7, 39]. Pole powierzchni kolektora zbiorczego wyznacza si z wzoru: A kz Q Q = = (6.93) c mc KZ gdzie: Q - wydajno pompy, m - współczynnik empiryczny m = 0,55 0, 65 ; mniejsze wartoci odpowiadaj wikszym wartociom wyrónika szybkobienoci n q, c KZ - prdko obwodowa cieczy wpływajcej do kolektora zbiorczego odpowiadajca składowej c 4 u prdkoci bezwzgldnej na wylocie z kierownicy odrodkowej. 4u
134 7. ZWIZKI I ZALENOCI PARAMETRÓW GEOMETRYCZNYCH Z KINEMATYCZNYMI ORAZ STRATY HYDRAULICZNE W ELEMENTACH UKŁADÓW PRZEPŁYWOWYCH MONOBLOKOWYCH POMP JEDNOSTOPNIOWYCH Pompy o konstrukcji przedstawionej na rys. 3.4 najczciej s maszynami jedno-stopniowymi. Układ hydrauliczny tych pomp jest złoony z: komory ssawnej ograniczonej sitem wlotowym, wirnika, którego kształt podyktowany wzgldami ruchowymi i eksploatacyjnymi odbiega od typowych rozwiza wirników innych pomp (rys. 8.7), kanałów nieruchomych budowanych w dwóch wersjach rozwiza hydraulicznych: o z kierownic promieniowo-osiow połczon z płaszczem wodnym, którego zadaniem jest chłodzenie napdowego silnika elektrycznego, skd nastpnie ciecz odprowadzana jest do króca tłocznego (rys. 3.5), o ze spiralnym kanałem zbiorczym, którego króciec tłoczny umieszczony jest z boku pompy, w tym rozwizaniu silnik chłodzony jest ciecz, w której zanurzony jest zespół pompowy, bd pracuje bez chłodzenia w przypadku umieszczenia zespołu w tzw. suchej komorze (rys. 7.). Ze wzgldu na załoone zmienne warunki eksploatacji, układy hydrauliczne tych maszyn projektuje si nie w oparciu o punkt obliczeniowy, jak pompy przeznaczone do pracy w otoczeniu punktu nominalnego, lecz przy załoeniu okrelonego kształtu charakterystyki przepływu ( Q) charakterystyki poboru mocy ( Q) P p H oraz nieprzecianego kształtu, przy załoeniu pełnego wykorzystania stojcej do dyspozycji mocy silnika napdowego. Zgodnie z rozdziałem 3 przyjmuje si równie, e spełnione s midzy innymi nastpujce załoenia: rónica midzy kinematyk teoretyczn i zastpcz kinematyk rzeczywist okrela kt odchylenia strugi od kierunku łopatki (4.39): ϑ = β β wdrówka wierzchołka wylotowego trójkta prdkoci wirnika w zmiennych warunkach pracy odbywa si wzdłu linii odpowiadajcej hipotezie stałego wyrónika kształtu wirnika B = const (4.4): µ bd b B = k µ b D D D τ 33

135 Rys. 7.. Pompa monoblokowa jednostopniowa ze spiralnym kanałem zbiorczym [30] W kolejnych rozdziałach zostały omówione zwizki pomidzy parametrami geometrycznymi i kinematycznymi oraz zalenoci okrelajce wartoci strat hydraulicznych w elementach układu przepływowego pompy. Sumaryczne straty hydrauliczne pompy mona rozdzieli na: straty hydrauliczne wirnika ( p ) ( ) s W, h s W straty hydrauliczne kierownicy bezłopatkowej ( p s ) D, ( h s ) D straty hydrauliczne kierownicy ( p s ) K, ( h s ) K straty hydrauliczne płaszcza wodnego silnika ( p s ) PW, ( h s ) PW straty hydrauliczne króca tłocznego ( p s ) KT, ( h s ) KT Ze wzgldu na małe wartoci strat przepływu przez sito wlotowe pominito je w dalszej analizie przepływu. Całkowite straty hydrauliczne dla omawianego typu pomp mona zapisa jako sum strat w poszczególnych elementach układu przepływowego: 34
136 p s h s = = ( p s ) W + ( p s ) D + ( p s ) K + ( p s ) PW + ( p s ) KT ( h s ) W + ( h s ) D + ( h s ) K + ( h s ) PW + ( h s ) KT lub w postaci bezwymiarowej zgodnie z zalenociami (.): s ( ψ s ) W + ( ψ s ) D + ( ψ s ) K + ( ψ s ) PW ( ψ s ) KT ψ = + (7.) 7.. Straty hydrauliczne w wirniku Kinematyka przepływu oraz podstawowe równania okrelajce zalenoci midzy parametrami hydraulicznymi i geometrycznymi w wirniku i bezłopatkowej kierownicy s takie same (rozdział 4.6.) w obu przypadkach rozwiza konstrukcyjnych pomp (rys. 3.4 i rys. 3.5). W zwizku z tym pozostaje okrelenie strat hydraulicznych w tych elementach. Straty hydrauliczne w wirniku zwizane s z przepływem cieczy na odcinku 0- (rys. 3.3) i ich warto mona wyznaczy z zalenoci empirycznej [9, 35, 6, 66], wzór (3.48): gdzie: ρ ( p ) = ζ [( u u ) + ( w w )] s W W ζ W - współczynnik strat hydraulicznych w wirniku, u, u - prdko obwodowa na wlocie i wylocie z wieca łopatkowe- go wirnika: u u = πd = πd gdzie: w - wzgldna prdko napływu cieczy na łopatk wirnika, w - wzgldna prdko spływu cieczy z łopatki wirnika: w w = = n n ( u cu ) + cm ( u c ) + c u m (7.) (7.3) Podstawiajc do równania (3.48) wielkoci okrelone wzorami (7.), (7.3) oraz zalenoci: Q W = π D b µ c = π D b µ c (7.4) m u = i uwzgldniajc równoczenie załoenie c 0 oraz (.) i (.) dotyczce wyrónika wysokoci podnoszenia ψ i wydajnoci, otrzymuje si bezwymiarow posta równania strat w wirniku: m 35
137 ψ D b D b µ µ + τ c τ c ( ) sw = ζ W (7.5) Bezwymiarowy wskanik τ c w równaniu (7.5) jest okrelony wzorem: τ c = φctg β ( B) + Barc tgφ (7.6) Równanie (7.5) okrela bezwymiarow posta charakterystyki strat hydrau- ψ, w którym bezwymiarowy wyrónik wydajnoci pom- licznych wirnika ( ) sw py jest opisany wzorem: c m = (7.7) u Wystpujcy w równaniu (7.5) współczynnik strat przedstawiono na rys. 7.. ζ w [ - ] Q W /Q WN Rys. 7.. Współczynnik strat hydraulicznych ( Q / ) W Q WN P P P3 P4 ζ w wirniku W 36
138 Wykresy sporzdzano na podstawie wyników bada czterech pomp o wyrónikach szybkobienoci n =0 50, przeprowadzonych przez autora i kierowany przez niego zespół. q Na rys. 7. przedstawiono przebiegi krzywych ( Q / ) ζ dla czterech W W Q WN badanych pomp (jedna krzywa odpowiada jednej badanej pompie). Współczynniki strat dla pozostałych elementów układu hydraulicznego wyznaczone zostały dla tych samych pomp. 7.. Straty hydrauliczne kierownicy bezłopatkowej Kierownica bezłopatkowa D stanowi przestrze zawart pomidzy przekrojami kontrolnymi -3, tj. pomidzy wylotem z wirnika a wlotem do kierownicy (rys. 3.3). Straty hydrauliczne tego elementu wyznaczono z zalenoci podanej w [9, 35, 6]: gdzie: ρ ( p ) = ( c c ) s D ζ D 3 (7.8) ζ D - empiryczny współczynnik strat hydraulicznych kierownicy bezłopatkowej, c - prdko bezwzgldna cieczy na wylocie z wirnika, c - prdko cieczy na wylocie z kierownicy bezłopatkowej. 3 Prdko c jest wyznaczona z zalenoci: c = + (7.9) cm cu w której poszczególne składowe okrelone s nastpujco: składowa merydionalna: składowa obwodowa: Q W c m = (7.0) π D b µ c m ( B) + Barc tg cu = u cm ctg β (7.) u Prdko cieczy c 3 na wylocie z kierownicy bezłopatkowej okrela zwizek: c = c + c (7.) 3 3m 3u Warto składowej merydionalnej c 3m wyznacza si z zalenoci: 37
139 µ π b D Q c m = (7.3) w której: 3 D - rednica wlotu na wieniec łopatkowy kierownicy, 3 b - szeroko wieca łopatkowego kierownicy, 3 µ - współczynnik zmniejszenia przekroju wlotowego kierownicy przez łopatki: K 3 sin α π µ = D s z (7.4) gdzie: K z - liczba łopatek kierownicy, 3 s - grubo łopatki na wlocie do kierownicy, 3 α - wlotowy kt łopatki kierownicy. Składowa obwodowa u 3 c jest okrelana wzorem: u 3 u 3 c D D c = (7.5) Uwzgldniajc w równaniu (7.8) zalenoci (7.0) (7.) oraz (.) i (.), otrzymuje si bezwymiarow posta równania charakterystyk strat hydraulicznych kierownicy bezłopatkowej: ( ) + = 3 c v D D D D b D b D s τ η µ µ ζ ψ (7.6) lub uwzgldniajc, e sprawno objtociowa wyraa si wzorem: v η = gdzie: - bezwymiarowy wskanik wydajnoci pompy, - bezwymiarowy wskanik wydajnoci wirnika, bdzie: ( ) + = c D D s τ µ µ ζ ψ D D b D b D (7.7)
140 ζ D przedstawio- Wystpujcy w powyszych równinach współczynnik strat no na rys ζ D [ - ] P P P3 P Q /Q N Rys Współczynnik strat hydraulicznych ζ D (Q/Q N ) kierownic bezłopatkowych pomp Wykresy sporzdzano na podstawie wyników bada czterech pomp o wyrónikach szybkobienoci n =0 50, przeprowadzonych przez autora i kierowany przez niego zespół. q 7.3. Straty hydrauliczne kierownicy promieniowo-osiowej Kierownic stanowi łopatkowa kierownica o przepływie promieniowoosiowym, zawarta pomidzy przekrojami kontrolnymi 3-4 (rys. 3.3). Na rys 7.4 oznaczono: D - rednica wlotu na wieniec łopatkowy kierownicy, b 3 3 α 3 s 3 - szeroko na wlocie do wieca łopatkowego kierownicy, - kt konstrukcyjny łopatki na wlocie do wieca łopatkowego kie- rownicy, - grubo łopatki na wlocie do kierownicy, D 4 Z - rednica zewntrzna wylotu z kierownicy, D 4 - rednica wewntrzna wylotu z kierownicy, W 39
141 D 4 b s rednica wylotu z wieca łopatkowego kierownicy, - szeroko wieca łopatkowego na wylocie z kierownicy, - grubo łopatki na wylocie z kierownicy. Rys Przekrój merydionalny i poprzeczny kierownicy promieniowo-osiowej Główne wymiary Prdko cieczy na wlocie do kierownicy promieniowo-osiowej okrelaj wzory: (7.), (7.3), (7.4), (7.5). Na wylocie z kierownicy przyjto, e w przekroju kontrolnym 4 kierunek strug pokrywa si z kierunkiem łopatek, zatem: c = = (7.8) 4 c4 c4m Załoenie to, uzasadnione jest długim odcinkiem kanału o kcie α 4 = 90. Prdko cieczy na wylocie z kierownicy mona wyznaczy z zalenoci: Q c 4 = (7.9) A gdzie: A 4 - powierzchnia przekroju wylotowego kierownicy: 4 ( D4Z 4W ) µ 4 π A 4 = D (7.0) 4 4 µ - współczynnik zmniejszenia przekroju wylotowego kierownicy przez łopatki: 40
142 = z s K u4 µ 4 (7.) π ( D4Z + D4W ) s u4 - obwodowa grubo łopatki kierownicy. Straty hydrauliczne w kierownicy przyjto okrela wzorem: ρ ( p ) = ( c c ) s K ζ K 3 4 (7.) gdzie: ζ K - współczynnik strat hydraulicznych kierownicy (rys. 7.5). Uwzgldniajc w równaniu (7.) zalenoci od (7.) do (7.5) oraz (7.8), (7.9), (.), (.), otrzymuje si bezwymiarow posta równania charakterystyki strat hydraulicznych kierownicy: ( ψ ) s K D b = ζ K D3 b ζ K [ - ] P P P3 P4 3 µ µ 3 4D ( ) b µ D + τ D D µ c D 4Z Q/Q N 4W Rys Współczynnik strat hydraulicznych ζ K (Q/Q N ) kierownic promieniowo-osiowych pomp 4 3 (7.3) 4
143 Wykresy sporzdzano na podstawie wyników bada czterech pomp o wyrónikach szybkobienoci n =0 50, przeprowadzonych przez autora i kierowany przez niego zespół. q 7.4. Straty hydrauliczne w płaszczu wodnym Płaszcz wodny stanowi osiowo-symetryczny kanał piercieniowy wokół napdowego silnika elektrycznego. Ciecz po wyjciu z kierownicy płynie kanałem o stałym przekroju, po czym nastpuje zmiana kierunku zwizana z wlotem cieczy do króca tłocznego usytuowanego z boku płaszcza. Gwałtowna zmiana kierunku przepływu i przekroju kanału na wejciu do króca ma wpływ na parametry hydrauliczne cieczy ju w obszarze płaszcza wodnego i jest głównym ródłem strat w tym elemencie. Płaszcz wodny silnika przyjto traktowa jako kanał pomidzy przekrojami 4-5. Prdko cieczy na wlocie do płaszcza jest okrelona zalenoci (7.9), natomiast prdko w przekroju kontrolnym 5 (rys. 3.3) wzorem: c 5 = Q A 5 4 Q = π D 5 (7.4) gdzie: A 5 - powierzchnia przekroju wlotowego króca tłocznego, D 5 - rednica wlotowa króca. Straty hydrauliczne płaszcza wodnego silnika przyjto, zgodnie z [, 6], okrela równaniem: ρ ( p ) = ( c c ) s PW ζ PW 5 4 (7.5) w którym ζ PW oznacza współczynnik strat hydraulicznych płaszcza wodnego (rys. 7.6). Uwzgldniajc w zalenoci (7.5) zwizki (7.8), (7.4) oraz (.) i (.), otrzymuje si równanie bezwymiarowej charakterystyki strat hydraulicznych płaszcza wodnego: ( ψ ) D b µ s = ζ PW 6 PW ( D4Z D4 ) µ W 4 D5 D b µ (7.6) 4
144 ζ PW [ - ] Q /Q N Rys Współczynnik strat hydraulicznych ζ PW (Q/Q N ) w płaszczu wodnym pompy Wykresy sporzdzano na podstawie wyników bada czterech pomp o wyrónikach szybkobienoci n =0 50, przeprowadzonych przez autora i kierowany przez niego zespół. q 7.5. Straty hydrauliczne króca tłocznego Króciec tłoczny stanowi element hydrauliczny zawarty pomidzy przekrojami kontrolnymi 5-t (rys. 3.3). Najczciej jest to kanał w kształcie kolana o stałym lub malejcym przekroju kołowym. Straty hydrauliczne króca tłocznego okrelono wzorem: gdzie: ( p ) = s KT P P P3 P4 ρ ζ KT t c (7.7) ζ KT - współczynnik strat hydraulicznych króca (rys. 7.7), c - prdko cieczy na wylocie z króca: t c t = Q A t 4 Q = π D A t - powierzchnia przekroju na wylocie z króca, D - wylotowa rednica króca tłocznego. t t (7.8) 43
145 Uwzgldniajc w równaniu (7.7) zaleno (7.8) oraz (.) i (.), otrzymuje si równanie bezwymiarowej charakterystyki strat króca tłocznego: D b µ ( ψ ) = ζ s KT 6 KT D t (7.9) ζ KT [ - ] P P P3 P Q /Q N Rys Współczynnik strat hydraulicznych ζ KT (Q/Q N ) w krócach tłocznych pomp Wykresy sporzdzano na podstawie wyników bada czterech pomp o wyrónikach szybkobienoci n =0 50, przeprowadzonych przez autora i kierowany przez niego zespół. q 44
146 8. BADANIE STRUKTURY PRZEPŁYWU W ELEMENTACH HYDRAULICZNYCH POMP WIROWYCH 8.. Wprowadzenie Dalsze doskonalenie układów hydraulicznych pomp w aspekcie realizacji wymaganych parametrów powoduje konieczno cigłego ucilania formuł empirycznych wicych parametry przepływowe z parametrami geometrycznymi kanałów hydraulicznych. Zalenoci okrelajce straty przepływu w sposób istotny decyduj o zgodnoci wyników oblicze i bada dowiadczalnych projektowanych pomp. Dotychczasowy sposób doskonalenia tych zalenoci polegał na okrelaniu ich na podstawie wyników tak zwanych oblicze odtworzeniowych, wykorzystujcych wyniki bada wczeniej zaprojektowanych i zbadanych pomp. Obliczenia odtworzeniowe, podobnie jak obliczenia projektowe, oparte s najczciej na modelu jednowymiarowym przepływu, nieuwzgldniajcym szeregu zjawisk wystpujcych w przepływie cieczy rzeczywistej w kanałach hydraulicznych pomp. W zwizku z tym dalsze doskonalenie metod projektowania pomp wymaga prowadzenia analiz przepływów trójwymiarowych metodami numerycznej mechaniki płynów w elementach hydraulicznych pomp. Przepływ cieczy przez układ hydrauliczny pompy wirowej jest procesem zło- onym, klasyfikowanym w mechanice płynów, jako trójwymiarowy, nieustalony przepływ turbulentny cieczy lepkiej i nieciliwej. Dla opisania ruchu cieczy w przestrzeni kanałów hydraulicznych, naley w kadym jej punkcie okreli zarówno prdko reprezentowan przez trzy składowe wzdłu odpowiednich osi współrzdnych, jak i wielko cinienia statycznego. Wprowadzajc stosowne modele fizyczne i matematyczne, ruch cieczy moe by opisany równaniami analitycznymi, przedstawianymi w formie równa róniczkowych o pochodnych czstkowych, wywodzcych si z podstawowych zasad mechaniki płynów, tj. zasady zachowania masy, pdu i momentu pdu oraz energii. Form tego typu równa, do badania i analizy przepływów w wirujcych i nieruchomych elementach kanałów hydraulicznych pompy, stanowi układ równa Naviera-Stokesa uzupełniony o równanie cigłoci, który po uwzgldnieniu odpowiednich warunków pocztkowych i brzegowych rozwizuje si z wykorzystaniem komputerowych metod numerycznych. Układy równa Naviera-Stokesa w postaci zachowawczej (masy i momentu pdu) maj nastpujc posta: 45
147 x j j ρv v I n x nj τ + + Γ I I ρv I j = n ij j 0 n nk i j ij ρf g ρ ( ρv v + τ ) + = 0 I I x gdzie siła odrodkowa i Coriolisa w układzie krzywoliniowym wynosi: k (8.) (8.) = j k n n njk f ω r + ε ω v I (8.3) natomiast tensor napre: nj nj jk v nk v g k τ = µ ef g + g v. k k k (8.4) x x x Istnieje wiele komercyjnych programów komputerowych do rozwizywania i wspomagania tego typu zagadnie obliczeniowych. Zastosowanie numerycznych technik i procedur obliczeniowych wymaga wygenerowania siatki obliczeniowej na bazie zaprojektowanej ju geometrii kanałów hydraulicznych spełniajcych okrelone wymagania stawiane pompie. Dlatego te metody oparte na równaniach Naviera-Stokesa s wykorzystywane przede wszystkim do wyznaczania lokalnych parametrów cieczy, na podstawie których mona dokona analizy i oceny zaprojektowanych układów hydraulicznych, a po ich urednieniu w odpowiednich przekrojach kontrolnych wyznaczy charakterystyki hydrauliczne poszczególnych elementów i charakterystyki przepływowo-energetyczne zaprojektowanej pompy. Wyniki oblicze numerycznych s te wykorzystywane do wizualizacji struktury przepływu, na podstawie której okrela si obszary zawirowa cieczy bdcych ródłem dodatkowych strat hydraulicznych. Zawirowania te najczciej mona zlikwidowa poprzez zmiany geometrii kanałów układu hydraulicznego pompy. Na obecnym etapie rozwoju tych metod nie wykorzystuje si ich do wyznaczania głównych wymiarów geometrycznych pomp. Do wyznaczenia tych wymiarów stosuje si najczciej metody oparte na jednowymiarowym modelu przepływu. Rozwój numerycznych metod analizy przepływów trójwymiarowych oraz dostpno opracowanych na ich podstawie komercyjnych programów komputerowych, ogranicza znaczenie stosowanych dotychczas w projektowaniu maszyn przepływowych dwuwymiarowych oraz quasi-trójwymiarowych metod o rónym stopniu uproszcze fizycznych i matematycznych modeli przepływu cieczy [, 3, 46, 47]. 46
148 Z tego wzgldu procedury nowoczesnych metod projektowania pomp, spełniajce specjalne wymagania, powinny zawiera nastpujce etapy oblicze: wyznaczenie głównych wymiarów kanałów hydraulicznych pomp metod opart na jednowymiarowym modelu przepływu zawierajc nowe i udoskonalone zwizki empiryczne wice parametry konstrukcyjne z kształtem charakterystyki przepływu i poboru mocy, analiz struktury przepływu cieczy przez elementy układu hydraulicznego pompy numerycznymi metodami obliczania przepływów trójwymiarowych, okrelenie charakterystyk przepływowo-energetycznych pomp i ich poszczególnych elementów układów hydraulicznych. W rozdziale 9 zostały omówione procedury projektowania kanałów ruchomych i nieruchomych pomp wirowych odrodkowych o rónej liczbie elementów hydraulicznych oraz zrónicowanej geometrii (rys. 3.4 i 3.5) Aktualnie metody numeryczne stanowi najdoskonalsze narzdzie analizy i oceny przepływu w zaprojektowanych maszynach [, 4, 6, 7, 9, 3, 45, 46, 48, 55, 56, 57, 7], pomimo e istotny wpływ na uzyskany wynik oblicze mog mie: przyjty model turbulencji, załoone warunki pocztkowe i brzegowe, kształt zbudowanej lub wygenerowanej siatki oraz zawarta w niej liczba wzłów obliczeniowych, wymiana danych na powierzchniach podziału w przypadku złoonych układów hydraulicznych itp. W zwizku z powyszym stwierdzeniem wyniki oblicze numerycznych wymagaj weryfikacji wynikami bada struktury przepływu na stanowiskach dowiadczalnych. W kolejnych rozdziałach zostały przedstawione teoretyczne i do- wiadczalne badania struktury przepływu w elementach układu hydraulicznego: stopnia odrodkowej pompy wielostopniowego (rys. 3.5), wirniku i kierownicy odrodkowej jednostopniowej pompy (rys. 3.4). 8.. Badania numeryczne układu hydraulicznego stopnia odrodkowej pompy wielostopniowej Przedmiotem bada numerycznych jest stopie odrodkowej pompy wielostopniowej przedstawionej na rys Stopie ten składa si z: wirnika, łopatkowej kierownicy odrodkowej, przewału, łopatkowej kierownicy dorodkowej. Geometri wymienionych elementów przedstawiono na rys. rys. 8., 8.,


149 Rys. 8.. Wirnik pompy Rys. 8.. Kierownica odrodkowa pompy Widok od strony kanałów kierownicy odrodkowej 48

150 Rys Kierownica dorodkowa pompy Widok od strony kanałów kierownicy dorodkowej Schemat przekroju merydionalnego analizowanej pompy przedstawiono na rys Rys Schemat przepływowy analizowanej pompy [45] W - wirnik, KO - kierownica odrodkowa, P - przewał, KD - kierownica dorodkowa W procesie oblicze numerycznych mona wydzieli trzy podstawowe etapy: etap I - przygotowanie wirtualnej geometrii obliczanych kanałów hydraulicznych oraz generacja siatki obliczeniowej (tzw. pre-procesing), etap II - wykonanie oblicze dla przyjtego modelu turbulencji przy zadanych warunkach brzegowych (tzw. procesing), etap III - zobrazowanie wyników przeprowadzonych oblicze (tzw. postprocesing). 49
151 8... Przygotowanie wirtualnej geometrii Pierwszym etapem procesu numerycznego obliczania przepływu w kanałach hydraulicznych pompy jest stworzenie (jeli wczeniej nie została stworzona na etapie procesu projektowo-konstrukcyjnego) numerycznego opisu geometrii tych kanałów. Najwygodniejszym narzdziem do tego celu jest profesjonalny system CAD. W tym przypadku wykorzystany został Mechanical Desktop firmy Autodesk. Schemat przyjtego postpowania został pokazany na rys Rys Proces tworzenia danych dla programów generujcych siatk obliczeniow (generacja geometrii) 8... Generacja siatki dla programu obliczeniowego Trójwymiarowe siatki obliczeniowe wykorzystywane w analizie przepływu (CFD) dziel si na siatki strukturalne i niestrukturalne. Podział taki pokazano na rys Siatka obliczeniowa, jak akceptuje program TascFlow [68] wykorzystywany do oblicze, musi by trójwymiarow siatk strukturaln. Moe to by zarówno siatka składajca si z pojedynczego bloku, jak i siatka wieloblokowa. Siatka ta jest nieortogonalna i opisana w krzywoliniowym układzie współrzdnych. Kady z obszarów obliczeniowych moe posiada blok (podobszar) wyłczony z prze-
152 pływu, tzw. "block-off" (patrz rys. 8.6 druga kolumna). Siatka taka moe by wygenerowana przez dowoln aplikacj słuc do tego celu lub własne programy napisane w jzyku Fortran, C lub Autolisp. Siatki 3D block off Rys Typy siatek obliczeniowych stosowanych w programach obliczeniowych CFD Rys Sposoby podziału tego samego obszaru obliczeniowego na róne podobszary obliczeniowe Na rys. 8.7 pokazano róne sposoby podziału obszaru obliczeniowego na mniejsze bloki (domeny). Wybór metody zaley od moliwoci programu budujcego siatk oraz programu obliczajcego przepływ. Na przykład podział obszaru 5
, np.")
.")
153 obliczeniowego na 7 bloków, tak jak na rysunku z lewej strony, generalnie jest łatwiejszy, lecz wymaga zdefiniowania dodatkowo połczenia ze sob tych obszarów, gdzie w trakcie oblicze program bdzie traktował wartoci z ssiednich obszarów jako nowe wartoci brzegowe. W obliczeniach wykorzystywano siatki obliczeniowe z podziałem na wiele bloków (domain decopmosition), np. dla kanału hydraulicznego wirnika (rys. 8.8). Dla kanałów obu kierownic siatki były monoblokowe i miały obszary wyłczone z przepływu, tzw. blok-off (rys. rys. 8.9, 8.0, 8., 8.). Siatki obliczeniowe składajce si z kilku bloków (obszarów obliczeniowych) pozwalaj w łatwy sposób na wykorzystanie maszyn wieloprocesorowych do oblicze [4]. Rys Siatka obliczeniowa wirnika 5 Rys Siatka obliczeniowa kierownicy odrodkowej


154 Rys Siatka obliczeniowa kierownicy dorodkowej Rys. 8.. Siatki obliczeniowe całego stopnia 53
,")
155 Rys. 8.. Siatka obliczeniowa całego stopnia w przekroju merydionalnym Opis wykorzystywanej metody obliczeniowej Model fizyczny W metodzie obliczeniowej przyjto nastpujce załoenia: przepływ nieciliwy, przepływ lepki, lepko turbulentna (przepływ z liczb Reynoldsa > 300), zadanie trójwymiarowe. Model matematyczny Model matematyczny charakteryzuje: przepływ stacjonarny, przepływ eliptyczny 4 (mog wystpowa strefy recyrkulacji). Równania podstawowe W obliczeniach wykorzystywane s ponisze prawa mechaniki płynów: 4 Równanie Naviera-Stokesa, opisujce przepływ, jest typu eliptycznego [3]. 54
156 prawo zachowania strumienia masy Objto kontrolna Masa dopływajca Masa wypływajca Powierzchnia kontrolna Rys Objto kontrolna dla równania zachowania masy [67] Przyrost masy w objtoci kontrolnej = wejciowy strumie masy - wyjciowy strumie masy = 0 0 = ρ dv + ( ρv n ) da (8.5) t CV prawo zachowania iloci ruchu Objto kontrolna Siły zewntrzne Strumie pdu wylotowy Strumie pdu wlotowy Powierzchnia kontrolna Rys Objto kontrolna dla prawa zachowania iloci ruchu [67] Suma sił zewntrznych = Przyrost iloci ruchu + ilo ruchu na wejciu - ilo ruchu na wyjciu w objtoci kontrolnej 55
157 d( mv) F = = ρ vdv + ( ρ vv n) da (8.6) dt t Metoda dyskretyzacji równa podstawowych CV Do rozwizania powyszych równa zastosowano: o metod objtoci skoczonych, o równania zachowania (strumienia masy, iloci ruchu) zapisane w kartezjaskim układzie współrzdnych, o wartoci cinie i składowych prdkoci przypisane s do tych samych wzłów siatki, tzw. "collocate arrangement" (rys. 8.5). CS 56 Rys Przyporzdkowanie zmiennych równania N-S na siatce obliczeniowej Równania podstawowe w przyjtym układzie współrzdnych kartezjaskich bd miały nastpujc posta: równanie cigłoci: x j ( V ) = 0 ρ (j =,,3) (8.7) j gdzie: V j - reprezentuje kartezjaskie składowe trójwymiarowego wektora prdkoci, równanie zachowania iloci ruchu (pdu): gdzie: t p V V i j ( ρ V i ) + ( ρv iv j ) = µ eff + + fi (8.8) x j xi x j x j xi ( Ω V + Ω ( Ω r) ) f i = ρ (8.9)
158 Człon (8.9) reprezentuje w układzie obracajcym si z prdkoci ktow Ω, sił Coriolisa i sił odrodkow: µ = µ + (8.0) eff µ T gdzie: µ - lepko wiskotyczna, µ T - lepko turbulentna, wyznaczana z modelu turbulencji k ω. wybrano skon dyskretyzacj pod prd członów konwekcyjnych - SUDS (Skew Upstream Differencing Scheme). Jest to metoda drugiego rzdu. Wzeł siatki Objto kontrolna Rys Usytuowanie elementarnej objtoci kontrolnej na siatce obliczeniowej do całkowania równa podstawowych Model turbulencji Celem matematycznego modelowania turbulencji jest podanie zwizków midzy napreniami turbulentnymi a polem urednionych prdkoci. Wykorzystuje si podejcie oparte o hipotez Boussinesqa. Hipoteza ta podaje zwizek pomidzy tensorem napre turbulentnych τ a tensorem prdkoci deformacji ij D w urednionym równaniu N-S przez współczynnik zwany lepkoci turbulentn: gdzie: τ = ρ = ij T ij T i j' ij v ' v µ TD (8.) i ' j' ρ v v - składowa naprenia turbulentnego, tzw. naprenia Reynoldsa. Wyznaczenia lepkoci turbulentnej µ T dokonano na podstawie dwurównaniowego modelu turbulencji k ε. W modelu tym Prandtl i Kołmogorow załoyli, e lepko turbulentna jest proporcjonalna do iloczynu turbulentnej skali prdkoci υ i drogi mieszania Prandtla l t : t 57
159 W modelu energii turbulencji υ k. µ = ρ cµ υ l (8.) T t t k ε warto υ t wyznaczamy jako pierwiastek z kinetycznej t = Natomiast droga mieszania l t zwizana jest z wielkociami k i ε równaniem: gdzie: ε k 3 ε = (8.3) l t - współczynnik dyssypacji energii. Po podstawieniu otrzymujemy zaleno na dynamiczn lepko turbulentn: k = ρ c (8.4) ε µ T µ natomiast k i ε wyznaczamy z nastpujcych równa róniczkowych: równanie dla k: równanie dla ε : gdzie: ( ρ k) ( ρv jk) + = Pk t x ρε + x j µ T k σ k x j, (8.5) ( ρε ) ( ρv jε ) ε µ T ε + = ( C + ε Pk Cε ρε ) (8.6) t x k x j σ ε x j P V V V jest produkcj energii turbulencji. Stałe modelu według [5, 8, 37] s nastpujce: C i j i k = µ T + x j x (8.7) i x j µ = ε ε σ k σ ε 0.09 C =.44 C =.9 =.0 =.3 Warunki brzegowe W obliczeniach numerycznych postawiono nastpujce warunki brzegowe:. pole prdkoci na wlocie do kanału (warunek brzegowy Dirichleta), 58
160 . warto cinienia statycznego na wylocie z kanału (warunek brzegowy Dirichleta), 3. zerowy gradient cinienia na wylocie (warunek brzegowy Neumana), 4. zerowanie sie prdkoci na ciankach kanału (warunek brzegowy Dirichleta), 5. zerowy gradient składowej normalnej prdkoci w kierunku normalnym do cianki (warunek brzegowy Neumana), 6. intensywno turbulencji i droga mieszania dla modelu turbulencji k ε. Na rys. 8.7 przedstawiono graficzn ilustracj warunków brzegowych z uwzgldnieniem przecieków przez uszczelnienia stopnia pompy odrodkowej. Załoono strumienie mas wynikajce ze strumieni objtoci płyncych przez uszczelnienie przednie Q UP, tylne Q UT, midzystopniowe Q OO = QUT + QUM oraz uszczelnienie przednie drugiego stopnia Q UP (rozdział 9). Rys Warunki brzegowe do obliczania stopnia pompy 59
161 Warunek brzegowy na cinienie statyczne na wylocie został postawiony na powierzchni tu przed wlotem na łopatki wirnika II stopnia. Wartoci drogi mieszania i intensywnoci turbulencji dla przyjtego modelu turbulencji: l 0.05; v = 0.05 (8.8) t = t Przejcie z układu wirujcego do układu bezwzgldnego odbywało si poprzez urednienie obwodowe lokalnych parametrów cieczy. Metoda ta w programie TascFlow nazwana jest jako stage average. Ze wzgldu na rón liczb łopatek w kanale kierownicy odrodkowej i do- rodkowej załoono, e elementy kanału kierownicy dorodkowej obracaj si z bardzo mał prdkoci ktow (n = Hz) i moliwe było zastosowanie przejcia typu frozen rotor, polegajcego na przeniesieniu parametrów płyncej cieczy z kanałów kierownicy odrodkowej do kanałów kierownicy dorodkowej przy okrelonym ustawieniu ktowym obu kierownic wzgldem siebie (rys. 8.8). Rys Układy odniesienia dla poszczególnych elementów stopnia Obliczenie przepływu przez wirnik Obliczenia wirnika wykonano na siatce obliczeniowej o liczbie komórek objtoci kontrolnych (36 x 4 x wzłów głównych), pokazanej na rys Siatka ta została wygładzona eliptycznie z zastosowaniem, opisanej w [46], ortogonalizacji linii siatki na brzegach. Obliczenia wykonano w wirujcym układzie odniesienia z uwzgldnieniem sił odrodkowych i sił Coriolisa (8.3). W obliczeniach postawiono nastpujce warunki brzegowe: 60
162 . jednorodny profil prdkoci bezwzgldnej bez zawirowania wstpnego, dajcy strumie masy płyncy przez wirnik: c a m = c c u r = 0 = 0 + m przecieki = ρ da A ρ m A W da (8.9) Warunek brzegowy na cinienie Na rednicy.5xd (p =const). Składowa obwodowa. Składowa promieniowa Przekrój wylotowy na rednicy D 3. Składowa osiowa Profile prdkoci bezwzgldnych otrzymane w wyniku obwodowego urednienia prdkoci wg równa: c π ( z) = ( wu + u crdθ π c u ) r 0 Warunek brzegowy na wlocie do koła wirnikowego Jednorodny profil prdkoci bezwzgldnej bez składowej obwodowej c 0 ρ m = c da A wlotu u = (8.3) w a wlotu (8.0) π cr ( z) = crdθ π 0 (8.) π 3 ca ( z) = cacrdθ π c r 0 (8.) Rys Warunki brzegowe do obliczania koła wirnikowego Wyznaczanie profilu prdkoci na wylocie z koła 6
163 . warto cinienia statycznego p = const na wylocie z kanału (warunek brzegowy Dirichleta) w obszarze o rednicy o 5% wikszej ni rednica wylotowa wirnika, 3. zerowy gradient cinienia na wylocie (warunek brzegowy Neumana), 4. zerowanie si prdkoci na ciankach kanału (warunek brzegowy Dirichleta). Warunki 3 i 4 realizowane s wewntrznie w programie obliczeniowym. Graficzn ilustracj warunków brzegowych wraz z równaniami uredniajcymi prdkoci, wyznaczone w obliczeniach numerycznych, przedstawiono na rys Składowa obwodowa c u wyznaczana jest dla rednicy D. Do oblicze kierownicy została skorygowana zgodnie z równaniem krtu (6.4). Otrzymane w wyniku oblicze rozkłady prdkoci i cinie pokazano na rysunkach od 8.35 do Obliczenie przepływu przez elementy nieruchome Obliczenia nieruchomych kanałów hydraulicznych, czyli kierownicy odrodkowej i dorodkowej wykonano na siatkach obliczeniowych o liczbie komórek objtoci kontrolnych równej i 06 70, co daje odpowiednio 98 x 4 x i 7 x 47 x wzłów głównych, pokazanych na rys. rys. 8.9, 8.0, 8.. Siatki zostały wygładzone eliptycznie z zastosowaniem ortogonalizacji linii siatek na brzegach. W obliczeniach postawiono nastpujce warunki brzegowe:. otrzymany profil prdkoci na rednicy D został obwodowo uredniony dla kadej warstwy wzdłu osi z (osi pompy) wg wzorów (8.0), (8.), (8.), zamieszczonych na rys. 8.9; składowa promieniowa c r została skorygowana tak, aby dawała strumie masy płyncy przez elementy nieruchome, czyli: ρ crda ρ c3rda = Awyl wirnika Awl kierownicy m przecieki (8.4). warto cinienia statycznego na wylocie z kanału (warunek brzegowy Dirichleta); powierzchnia, na której przyjto stałe cinienie była oddalona od rzeczywistej powierzchni wylotowej z kierownicy tak, jak to pokazano na rys zerowy gradient cinienia na wylocie (warunek brzegowy Neumana); jest to warunek realizowany wewntrznie w programie obliczeniowym, tak jak i nastpny, 4. zerowanie si prdkoci na ciankach kanału (warunek brzegowy Dirichleta). 6
164 Rys Warunki brzegowe dla elementów nieruchomych pompy Otrzymane wyniki oblicze rozkładu prdkoci i cinie przedstawiono na rys. od 8.47 do Metoda rozwizywania równa liniowych Program TascFlow uywa do rozwizywania macierzy równa liniowych metody wielosiatkowej, tzw. AMG (Algebraic Multigrid Metod). Metoda ta jest opisana szeroko w literaturze [3]. Metoda wielosiatkowa jest łatwo adaptowana do oblicze równoległych Badania dowiadczalne stopnia odrodkowej pompy wielostopniowej Jak stwierdzono w rozdziale 8. wyniki oblicze numerycznych przed wykorzystaniem ich w metodach projektowania powinny podlega weryfikacji wynikami pomiarów. Weryfikacja wyników numerycznego badania struktury przepływu cieczy przez pomp wymaga wic przeprowadzenia pomiarów na specjalnie do tego celu zbudowanym stanowisku badawczym. 63
165 8.3.. Stanowisko badawcze Stanowisko to powinno umoliwia: pomiar cinie i prdkoci lokalnych w wybranych płaszczyznach i punktach kontrolnych, pomiar wydajnoci badanej pompy, pomiar mocy i czstoci obrotów, pomiar cinie w krócach ssawnym i tłocznym oraz w płaszczyznach rozdzielajcych stopie wlotowy od stopnia rodkowego i stopie rodkowy od stopnia wylotowego, wyznaczenie strat ubocznych w badanej pompie (przecieki, moc tarcia tarcz wirujcych, moc tarcia w łoyskach i dławnicach). W dalszej czci rozdziału omówiono konstrukcj stoiska badawczego na przykładzie stoiska do bada rónych wariantów pomiarowych wielostopniowych pomp odrodkowych. Przedstawione rozwizania elementów konstrukcyjnych stoiska, jak i układy pomiarowe maj charakter ogólny dla stoisk budowanych do bada dowiadczalnych struktury przepływu w kanałach hydraulicznych pomp wielostopniowych. Rys. 8.. Schemat stanowiska pomiarowego - zbiornik, - pompa, 3 - silnik, 4 - rurocig ssawny, 5 - rurocig tłoczny, 6 - zawór regulacyjny, 7 - przepływomierz, 8 - rami silnika, 9 - obciniki, 0 - przetwornik siły, - czujnik obrotomierza, - przewody sygnałów hydraulicznych, 3 - komutator sygnałów hydraulicznych, 4 - przetworniki rónicy cinie, 5 - komputerowy zestaw pomiarowy 64
 jest napdzana bezporednio silnikiem elektrycznym zawieszonym na kołysce (3). Zmiana punktu pracy pompy jest dokonywana przez dławienie przepływu zaworem (6) na tłoczeniu. Rys. 8.")
166 Schemat stanowiska spełniajcego wyej wymienione wymagania został przedstawiony na rys. 8., a widok badanej pompy na rys. 8.. Stanowisko charakteryzuje si zamknitym obiegiem wody z otwartym zbiornikiem (). Pompa () jest napdzana bezporednio silnikiem elektrycznym zawieszonym na kołysce (3). Zmiana punktu pracy pompy jest dokonywana przez dławienie przepływu zaworem (6) na tłoczeniu. Rys. 8.. Widok badanej pompy na stanowisku pomiarowym Głównym elementem stanowiska jest trójstopniowa pompa odrodkowa (rys. 8.3). Elementami układu hydraulicznego stopnia pierwszego s: komora wlotowa KW, wirnik W, odrodkowa kierownica łopatkowa KO, bezłopatkowy przewał P, dorodkowa kierownica łopatkowa KD. Stopie drugi stanowi wirnik, odrodkowa kierownica łopatkowa, bezłopatkowy przewał, łopatkowa kierownica dorodkowa. W skład ostatniego stopnia badanej pompy wchodzi wirnik, odrodkowa kierownica łopatkowa oraz komora wylotowa. 65
167 Rys Schemat układu pomiarowego trójstopniowej pompy odrodkowej Rozmieszczenie punktów i płaszczyzn pomiarowych oraz linii sondowania 0 - rozmieszczenie 4 punktów na obwodzie do odbioru cinienia statycznego przed wlotem na wirnik I stopnia, PI - punkt odbioru sygnału cinienia statycznego za wirnikiem I stopnia po stronie tarczy przedniej, TI - punkt odbioru sygnału cinienia statycznego za wirnikiem I stopnia po stronie tarczy tylnej, t - punkt odbioru sygnału cinienia statycznego za I stopniem, UP - punkt odbioru sygnału cinienia statycznego przed uszczelnieniem przednim wirnika, UT UT - punkty pomiaru spadku cinienia statycznego w uszczelnieniu tylnym wirnika, M M - punkty pomiaru spadku cinienia statycznego w uszczelnieniu midzystopniowym, 5 - punkty odbioru cinienia statycznego w łopatkowej kierownicy odrodkowej, - punkty odbioru cinienia statycznego w łopatkowej kierownicy dorodkowej (tarcza przednia), - punkty odbioru cinienia statycznego w łopatkowej kierownicy dorodkowej (tarcza tylna), RS, RT - punkty odbioru sygnału cinienia statycznego w rurocigach ssawnym i tłocznym, usytuowane zgodnie z wymaganiami normy PN-EN ISO 9906, SK5 - sonda kulowa piciootworkowa, S-S8- sondy młotkowe dwuotworkowe 66

168 Punkty pomiaru cinie na cianie kierownicy odrodkowej pokazano na rys. 8.4, a linie sondowania w przekroju wylotowym na rys Rys Kierownica odrodkowa pompy. Punkty odbioru cinienia na ciance od strony ssawnej Rys Kierownica odrodkowa pompy. Połoenie linii sondowania Rozmieszczenie punktów pomiaru cinienia na cianach kierownicy dorodkowej przedstawiono na rys. rys. 8.6, 8.7,
169 Rys Kierownica dorodkowa pompy. Punkty odbioru cinienia na ciance od strony tłocznej Rys Kierownica dorodkowa pompy. Punkty odbioru cinienia na ciance od strony ssawnej 68
")
170 Rys Kierownica dorodkowa pompy. Połoenie linii sondowania Na układ pomiarowy cinie (przewody, komutatory, przetworniki) mog by równie kierowane sygnały cinienia z sond do pomiaru prdkoci (rys. 8.5 i 8.8) oraz z wybranych punktów na cianach kanałów hydraulicznych (rys. rys. 8.4, 8.6, 8.7). Sygnały z przetworników cinie mog by przekazywane do komputerowego zestawu pomiarowego (rys. 8.). Poza dowiadczalnym wyznaczeniem parametrów lokalnych (cinie, prdkoci) oprzyrzdowanie umoliwia równie pomiary do okrelenia: charakterystyk przepływowo-energetycznych pompy i poszczególnych stopni, mocy tarcia wirujcych tarcz wirników, mocy tarcia w łoyskach i dławnicach, przecieków przez uszczelnienia wewntrz pompy (tzn. uszczelnienie przednie i tylne wirnika oraz uszczelnienie midzystopniowe). W kolejnych rozdziałach zostały omówione przyrzdy i układy pomiarowe stanowiska Pomiar wydajnoci Do pomiaru wydajnoci zastosowano 5 przepływomierz zwkowy wykonany zgodnie z wymaganiami normy PN-93/M /0 dla kryz z przytarczowym odbiorem sygnału cinienia. Wydajno, zgodnie z powysz norm, wyznacza si z zalenoci: 5 Obecnie s stosowane przepływomierze elektromagnetyczne. 69
171 Q = C 4 β π ε d 4 4 ρ p K (8.5) gdzie: C - współczynnik przepływu: C = β Re + β β + β D - przewenie kryzy: Re D - liczba Reynoldsa: m (8.6) d β = (8.7) D 4Q Re D = (8.8) π D υ 6 υ =,0 0 s - lepko kinematyczna wody, ε = - liczba ekspansji, p K - spadek cinienia na kryzie, kg ρ = gsto wody w temperaturze 0 o C. m Pomiary mocy i czstoci obrotów Do wyznaczenia mocy na wale pompy sprzgnitym z wałem napdowego silnika elektrycznego słuy układ pomiarowy, w którym silnik (3) (rys. 8.) jest wyposaony w rami (8), którego o przecina prostopadle o silnika. Silnik jest zawieszony wahliwie w specjalnych podporach łoyskowych. Pomiar mocy polega na wyznaczenia momentu reakcji stojana, który jest równy momentowi obrotowemu wirnika silnika napdowego M oraz na okreleniu prdkoci ktowej wału ω (rys. 8.9). 70
172 gdzie: Rys Schemat układu pomiaru momentu na wale Zaleno okrelajca pobór mocy ma posta: ( ) P = ω M = π n ' gmsls mw mp l w (8.9) m s - masa obcienia układu pomiarowego korygowana w czasie pomiarów, m - masa równowaca wskazania wagi, w m - masa obcienia wstpnego, l w p - długo ramienia kołyski, l s - odległo zawieszenia masy obciajcej, n ' - czsto obrotowa wału. Niezbdn do okrelenia prdkoci ktowej ω, prdko obrotow mierzono przy pomocy obrotomierza cyfrowego z czujnikiem fotooptycznym () (rys. 8.), odbierajcym sygnały z tarczy zamocowanej na wale silnika zaopatrzonej w 60 otworków. Dokładno pomiaru obrotów wynosi ± obr/min. W trakcie bada wyznaczano nastpujce wartoci mocy: moc na wale pompy P, moc tarcia wirujcych tarcz wirników P b, moc mechaniczn (moc tarcia w łoyskach i dławnicach) P m. Moc tarcia w łoyskach i dławnicach P m okrelono według wyej wymienionych zasad po uprzednim zdemontowaniu wirników pomp i zastpieniu ich na wale tulejami o wymiarach odpowiadajcych piacie wirnika. 7

173 Do wyznaczenia mocy tarcia wirujcych tarcz wirników pompy ich kanały zostały zalepione odpowiednim wypełniaczem. Moc P b stanowi wówczas rónic tak zmierzonej na stanowisku oraz wyznaczonej wczeniej mocy strat w łoyskach i dławnicach P m Pomiar cinie statycznych Do pomiaru cinie statycznych w nieruchomych elementach hydraulicznych pompy, w ciankach ich kanałów wykonano otworki o rednicy 0.5 mm połoone w wybranych przekrojach kontrolnych. O wyborze punktów pomiaru decydowały wzgldy hydrauliczne i konstrukcyjne elementów pompy Przyrzdy do pomiaru parametrów lokalnych Lokalne cinienia cieczy, działajce na ciany kanałów przepływowych, okrelano odbierajc sygnały cinienia z otworków wykonanych w ciankach. Połoenie otworków na ciankach kanałów kierownic oraz linie sondowania przedstawiono w rozdziale Prdkoci i cinienia cieczy wewntrz strugi okrelano, wykorzystujc kierunkowe sondy cinienia. Rys Budowa czułki sondy młotkowej dwuotworkowej 7
174 Do pomiarów zastosowano dwuotworkowe sondy młotkowe. W porównaniu do innych sond kierunkowych ww. sonda posiada t zalet, e pozwala na pomiary w przepływie przestrzennym ze znacznymi gradientami cinie w stosunkowo wskich kanałach. Wad jej jest wiksza pracochłonno pomiarów. Sonda pozwala na okrelenie cinienia statycznego oraz wartoci i kierunku wektora prdkoci płynu wystpujcych w miejscu umieszczenia czułki. Na rys przedstawiono konstrukcj sondy dwuotworkowej oraz oznaczenia któw. W pomiarach zastosowano sondy o rednicy trzpienia,5 mm, z czułk o rednicy 3,5 mm i gruboci mm oraz rednicy otworków 0,3 mm. Wzorcowanie sond przeprowadzono w tuneliku powietrznym w zakresie któw: -4 o < α< 4 o i -7 o < < 36 o oraz w zakresie liczb Re = ,60 4, co odpowiada zakresowi prdkoci wody m/s. W trakcie wzorcowania sondy w tuneliku dla kadego punktu zostały zmierzone: sygnał cinienia p z otworka dla sondy ustawionej pod ktem α, dla którego sygnał ten osiga warto zblion do maksymalnej, sygnał cinienia p z otworka dla sondy ustawionej pod ktem α = α -40 o, sygnał cinienia p z otworka dla sondy ustawionej pod ktem α = α +40 o, sygnał cinienia p z otworka dla sondy ustawionej pod ktem α = α +80 o, sygnał cinienia p z otworka dla sondy ustawionej pod ktem α = α -40 o, sygnał cinienia p z otworka dla sondy ustawionej pod ktem α = α +40 o. Na podstawie powyszych wartoci sygnałów zostały okrelone charakterystyki sondy (rys. 8.3) obejmujce zalenoci dla dwóch współczynników ktowych k α (α,) i k (α,) zdefiniowanych wzorami: '' ''' p p kα = (8.30) p p p ' '' ' '' '' ''' ' ' '' ''' p p + p p + p p k = (8.3) p p p j oraz szeciu współczynników odbioru cinienia dynamicznego k i (α,), zdefiniowanych jako: ''' ''' 73
175 k p p j j i s i = (8.3) pd gdzie: p s i p d - oznaczaj odpowiednio cinienie statyczne i dynamiczne. Rys Charakterystyka kierunkowa sondy dwuotworkowej Wykorzystanie sondy w trakcie pomiarów w kanale pompy polega na okre- leniu wartoci szeciu sygnałów cinie p i j dla ww. połoe sondy, z których mona obliczy wartoci współczynników k α i k i na tej podstawie z charakterystyk sondy okreli kierunek wektora prdkoci (kty α i ) oraz wartoci sze- ciu współczynników k i j. 74
176 Warto wektora prdkoci okrela si z zalenoci: c = a cinienie statyczne z wzoru: pd ρ p s = j i ( pi ρ( k j i j j i d p ) k ) l k l k (8.33) = p k p (8.34) W badaniach parametrów lokalnych cieczy zastosowano równie piciootworkowe sondy SK5 (rys. 8.3) z czułk kulist o rednicy,5 mm. rednica otworków wynosi 0,4 mm. Schemat czułki sondy przedstawiono na rys Rys Schemat czułki sondy SK5 z oznaczeniem otworków i któw napływu cieczy Pomiar omawian sond umoliwia wyznaczanie cinienia statycznego, cinienia dynamicznego oraz całkowitego, panujcego w miejscu pomiaru, a take wyznaczanie kierunku i wartoci wektora prdkoci cieczy. Kierunek wektora prdkoci jest okrelony ktem α lecym w płaszczynie prostopadłej do osi sondy i przechodzcej przez otworki i 3 oraz ktem lecym w płaszczynie przechodzcej przez o sondy. Pomiar sond polega na takim obracaniu jej w uchwycie, aby cinienia p i p 3 w otworkach i 3 wyrównały si, co prowadzi do wyznaczenia kta α napływu cieczy zawartego pomidzy kierunkiem odniesienia a osi centralnego otworka. Odczytane cinienia p, p = p 3, p 4, p 5 wzgldem przyjtego cinienia odniesienia umoliwiaj wyznaczenie wartoci funkcji: p5 p4 k = (8.35) p p 75
177 wyznaczonej w trakcie wzorcowania sondy. Na tej podstawie jest okrelany kt i pozostałe wartoci funkcji wzorcowania sondy k, k = k 3, k 4, k 5 odpowiadajce tej wartoci kta. W kolejnym kroku jest wyznaczane cinienie dynamiczne wg zalenoci: p d px p y = (8.36) k ( ) k ( ) x gdzie: x i y - numery dowolnych otworków tak dobrano aby licznik i mianownik w powyszym wyraeniu były jak najwiksze, co zapewnia wiksz dokładno pomiaru. Cinienie statyczne jest okrelane z zalenoci: natomiast cinienie całkowite z wzoru: x x y p = p k ( ) p (8.37) c p k ( + p d d p = ) (8.38) 76 Rys Składowe wektora prdkoci w przyjtym układzie Prdko cieczy w miejscu pomiaru jest wyznaczana z zalenoci: p d c = (8.39) ρ natomiast składowe wektora prdkoci s okrelane na podstawie wyznaczonych któw α i. Składowe prdkoci dla przyjtego układu pokazano na rys
178 Parametry lokalne cieczy i współczynniki pracy kierownicy Wektory prdkoci otrzymane z pomiarów sondami rozkładano na składowe w układzie współrzdnych zwizanym z korpusem pompy, przyjmujc: dla składowej obwodowej c u dodatni zwrot zgodny ze zwrotem prdkoci unoszenia, dla składowej promieniowej c r dodatni zwrot od osi pompy na zewntrz, dla składowej osiowej c a dodatni zwrot od ssania do tłoczenia pompy. Parametry rednie dla danej linii sondowania S lub powierzchni A obliczano zgodnie z poniszymi zasadami. Składowe merydionalne prdkoci c m uredniano ze strumienia objtoci cieczy dla linii S: = S S m m S S c c lub dla powierzchni A = A A m m A A c c (8.40) Składowe obwodowe prdkoci c u uredniano ze strumienia impulsu cieczy dla linii S: = S m S m u u S c S c c c lub dla powierzchni A = A m A m u u A c A c c c (8.4) Wypadkowe prdkoci c uredniano ze strumienia energii cieczy dla linii S: = S m S m S c S c c c (8.4)
179 78 lub dla powierzchni A = A m A m A c A c c c rednie cinienie statyczne obliczano dla linii S: = S m S m S c S c p p lub dla powierzchni A = A m A m A c A c p p (8.43) rednie cinienie całkowite obliczano jako: c p p c ρ + =. (8.44) Współczynniki charakteryzujce prac odcinka kanału kierownicy zawartego midzy przekrojami pocztkowym i oraz kocowym i+ obliczano wg zalenoci: współczynnik przyrostu cinienia statycznego: i i i p c p p C = + ρ (8.45) współczynnik strat cinienia całkowitego: p pid i i i i i i i ci ci str C C c c c c p p c p p k = + + = = ρ ρ (8.46) gdzie: c p - cinienie całkowite, pid C - współczynnik przyrostu cinienia statycznego dla przepływu bez strat.
180 Niepewno pomiarów Niepewno okrelenia wielkoci x bdcej funkcj wielkoci y i obliczono jako: x = ± n δx = yi δyi i (8.47) gdzie: yi - niepewno okrelenia wielkoci y i. Stosujc t zaleno obliczono niepewnoci okrelenia z pomiarów poszczególnych wielkoci. Niepewnoci okrelenia poszczególnych wielkoci składowych yi przyjmowano w zalenoci od zastosowanych przyrzdów pomiarowych oraz z analizy charakterystyk wzorcowania sond. Niepewno okrelenia wielkoci wyznaczanych przy pomocy sond cinienia niepewno wzgldna okrelenia prdkoci cieczy: c c d ρ = ± + (8.48) 4 pd 4 ρ p gdzie: niepewno okrelenia cinienia dynamicznego: p 4 4 ( ) ( ) ( ) ij pij pij + ki + k j ki k j ki k j ki k j p = ± (8.49) d niepewno okrelenia gstoci: cinienie dynamiczne: prdko cieczy: ρ = ±0,% ρ p d pi p j = k k i j c = p d ρ 79
181 rónica cinie całkowitych pomidzy otworkami o numerach i oraz j: p ij = p p niepewno okrelenia rónicy cinie p ij : ij i [ p + p ] i j p = ± (8.50) niepewno okrelenia cinienia w poszczególnych otworkach w stosunku do cinienia odniesienia pi oraz p j przyjmowano zalenie od zastosowanego przetwornika. Niepewno okrelenia pomiarowego kta α : α = ± ( α W αw ) + ( ) ( kα ) + ( α o ) kα j [%] (8.5) gdzie: niepewno okrelenia kta α w z charakterystyki wzorcowania sondy: α = 0, 5 W niepewno okrelenia kta α o ustawiania uchwytu sondy wzgldem osi pompy: α = 0, 5 niepewno okrelenia współczynnika k α : o '' ''' ' ''' ( p p ) ' ( p p ) ' '' ''' ' '' ''' ( ) p + ( ) p p p p p p k = ± (8.5) α ' '' '' ( p p ) ''' p + ' '' ''' ( ) p p p p p ', p '', p ''' - niepewnoci okrelenia cinie z otworka. Niepewno okrelenia kta pomiarowego : = ± W ( W ) + ( ) ( k ) + ( o ) k (8.53) 80
182 gdzie: niepewno okrelenia kta W z charakterystyki wzorcowania sondy: = 0, 5 W niepewno okrelenia kta o ustawiania uchwytu sondy wzgldem osi pompy: niepewno okrelenia współczynnika k : = 0, 5 (8.54) o k '' ''' ' '' ''' 3( p p ) ( p + p + p ) ' '' ''' ( ) p p p ' ' '' ''' 3p ( p + p + p ) = ± + ' '' ''' ( ) p p p p ' ' '' ''' 3p ( p + p + p ) + ' '' ''' ( ) p p p p '' ''' p ' + p ' + p + p ' ' p '' p '' p '' p ''' p ''' p p ', p '', p ''' - niepewnoci okrelenia cinie z otworka. ''' p p Wyniki oblicze numerycznych i bada dowiadczalnych p '' ''' + ' (8.55) Pomiary dowiadczalne, jak i obliczenia numeryczne przeprowadzono w szerokim zakresie zmian wydajnoci pompy. Poniej przedstawiono wybrane wyniki oblicze numerycznych i pomiarów dla wydajnoci nominalnej. Zestawienie wyników oblicze numerycznych obejmuje: pole cinienia statycznego na I stopniu dla wydajnoci nominalnej (model k ε ). Widok w rozwiniciu od łopatki do łopatki (blade to blade) w rónych przekrojach merydionalnych: 5, 50 i 95% (rys. 8.34), rozkład prdkoci w przekroju poprzecznym wirnika (rys. 8.35), rozkład prdkoci w przekroju merydionalnym wirnika (rys. 8.36), rozkład cinienia w przekroju poprzecznym wirnika (rys. 8.37), rozkład prdkoci wzgldnej w rodkowej powierzchni kanału wirnika (rys. 8.38), wektory prdkoci wzgldnej w rodkowej powierzchni kanału wirnika (rys. 8.39), wektory prdkoci wzgldnej w pobliu tarczy tylnej wirnika (rys ), wektory prdkoci wzgldnej w pobliu tarczy przedniej wirnika (rys. 8.4), 8
 w rónych miejscach przekroju merydionalnego: 5, 50 i 95%) k ε ) profil")
183 Rys Pole cinienia statycznego w I stopniu dla wydajnoci nominalnej (model Widok w rozwiniciu od łopatki do łopatki (blade to blade) w rónych miejscach przekroju merydionalnego: 5, 50 i 95%) k ε ) profil prdkoci wzgldnej w przekroju wylotowym z wirnika D (rys. 8.4), pole cinienia statycznego w rodkowej powierzchni kanału wirnika (rys. 8.43), wektory prdkoci na wlocie do wirnika I stopnia w połoeniu sondy SK5, dla modelu k ε (rys. 8.44), pole prdkoci na wlocie do wirnika (składowa merydionalna) (rys. 8.45), składowa obwodowa i merydionalna prdkoci na powierzchni wlotowej do wirnika I stopnia (rys. 8.46), wektory prdkoci w połoeniu sondy S9 na wylocie z kierownicy dorodkowej I stopnia dla modelu k ε (rys. 8.47), 8
, k ε obraz linii prdu w przepływie przez I stopie pompy dla modelu (rys. 8.5). Graficzn ilustracj wyników oblicze numerycznych przedstawiono na kolejnych rysunkach od 8.34 do 8.5. Rys. 8.35.")
184 rozkład składowej merydionalnej prdkoci na wylocie z kierownicy dorodkowej (rys. 8.48), prdko na wylocie z kierownicy dorodkowej (rys. 8.49), składowa merydionalna i obwodowa prdkoci na wylocie z kierownicy do- rodkowej (rys. 8.50), k ε obraz linii prdu w przepływie przez I stopie pompy dla modelu (rys. 8.5). Graficzn ilustracj wyników oblicze numerycznych przedstawiono na kolejnych rysunkach od 8.34 do 8.5. Rys Rozkład prdkoci w przekroju poprzecznym wirnika Rys Rozkład prdkoci w przekroju merydionalnym wirnika 83


185 Rys Rozkład cinienia w przekroju poprzecznym wirnika Rys Prdkoci wzgldne na powierzchni rodkowej kanału wirnika 84
186 Rys Wektory prdkoci wzgldnej na powierzchni rodkowej kanału wirnika Rys Wektory prdkoci wzgldnej w pobliu tarczy tylnej wirnika 85
187 Rys Wektory prdkoci wzgldnej w pobliu tarczy przedniej wirnika 86 Rys Profil prdkoci wzgldnej na wylocie z wirnika

188 Rys Pole cinienia statycznego na powierzchni rodkowej kanału wirnika 0m/s Rys Wektory prdkoci na wlocie do wirnika I stopnia w połoeniu sondy SK5 dla modelu k ε 87



189 Rys Pole prdkoci na wlocie do wirnika (składowa merydionalna) Wir w obszarze wlotu do wirnika generowany przez przeciek przez uszczelnienie przednie Rys Składowa obwodowa i merydionalna prdkoci na powierzchni wlotowej do wirnika I stopnia 88


190 0m/s Rys Wektory prdkoci w połoeniu sondy S9 na wylocie z kierownicy dorodkowej I stopnia dla modelu k ε Rys Rozkład składowej merydionalnej prdkoci na wylocie z kierownicy dorodkowej 89



191 Rys Prdko na wylocie z kierownicy dorodkowej Rys Składowa merydionalna i obwodowa prdkoci na wylocie z kierownicy dorodkowej 90




192 Rys Obraz linii pr du w przepływie przez I stopie pompy dla modelu k-ε Do wizualizacji wyników oblicze i pomiarów wykorzystano komercyjny program Tecplot [68]. Wykorzystano go wraz z interfejsem graficznym programu TascFlow ze wzgl du na mo liwo jednoczesnego pokazania na tym samym rysunku wyników oblicze i wyników eksperymentu (od rys do 8.63). Wyniki oblicze zostały aproksymowane z w złów siatki na punkty, w których wykonywano pomiary sondami ci nieniowymi z wykorzystaniem metody odwrotnych odległo ci. Warto dowolnej zmiennej w punkcie docelowym obliczono wg nast puj cego wzoru: 9
 E ( L ) i= gdzie: L i - odległo i-tego punktu siatki (ródła) od punktu połoenia sondy cinieniowej (celu), E - wykładnik potgi (przyjto E = 3, 5 ), N - liczba punktów połoonych najbliej punktu")
 kontrolne uredniania parametrów lokalnych pokazano na rys.")
193 N ( i ) E ródla i= ( Li ) celu = N (8.56) E ( L ) i= gdzie: L i - odległo i-tego punktu siatki (ródła) od punktu połoenia sondy cinieniowej (celu), E - wykładnik potgi (przyjto E = 3, 5 ), N - liczba punktów połoonych najbliej punktu celu (przyjto N = 8 ). W przypadku wektora prdkoci aproksymowano jego składowe w układzie kartezjaskim, a nastpnie obliczano wektor wypadkowy w punkcie celu. Wyniki bada i oblicze numerycznych przedstawiono, przyjmujc układ wektorów prdkoci składowych pokazany na rys Przekroje (powierzchnie) kontrolne uredniania parametrów lokalnych pokazano na rys i Przekrój 4-4 Przekrój 6-6 Przekrój 0-0 Przekrój - Rys Przekroje kontrolne do uredniania parametrów lokalnych W celu ilociowego porównania otrzymanych wyników oblicze bada wyznaczono urednione parametry stopnia pompy na powierzchniach pokazanych na rys
194 Do urednienia wartoci prdkoci c u, c r ( z), c a ( z) w przekroju wylotowym wirnika korzystano z zalenoci (8.0), (8.) i (8.). W pozostałych przekrojach uredniono wg zasady iloci ruchu: składow obwodow zgodnie z zalenoci: Rz ciu ( r) = wiu ui c c ( + ) π ia Rw ia dr (8.57) składow obwodow zgodnie z wzorem: c ir Rz ( r) = circiadr π c (8.58) ia Rw Zestawienie wyników oblicze i pomiarów obejmuje: wektory prdkoci zmierzone na wlocie do wirnika I stopnia w połoeniu sondy SK5 dla wydajnoci nominalnej (rys. 8.53), rozkłady cinie w kierownicy odrodkowej otrzymane z punktów odbioru cinienia na ciance od strony ssawnej (rys. 8.54), rozkłady cinie w kierownicy odrodkowej otrzymane w wyniku oblicze i pomiarów; kolorem niebieskim zaznaczono punkty odbioru cinienia wraz ze zmierzonymi wartociami (rys. 8.55), porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze; widok w kierunku osiowym (rys. 8.56), porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze; widok perspektywiczny (rys. 8.57), rozkłady cinie otrzymane z punktów obioru cinienia na ciankach kierownicy dorodkowej; od strony ssawnej - lewy kanał, od strony tłocznej prawy kanał (rys. 8.58), rozkłady cinie otrzymane w wyniku oblicze i pomiarów; kolorem niebieskim zaznaczono punkty odbioru cinienia wraz ze zmierzonymi wartociami (rys. 8.59), porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze; widok w kierunku osiowym (rys. 8.60), wektory prdkoci zmierzone na wylocie z kierownicy dorodkowej sond S9 (rys. 8.6), porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze; widok perspektywiczny (rys. 8.6). Graficzn ilustracj wyników oblicze i pomiarów przedstawiono na rysunkach od rys do

195 5 m/s 5 m/s 5 m/s Rys Wektory prdkoci na wlocie do wirnika I stopnia w połoeniu sondy SK5 dla wydajnoci nominalnej Rys Rozkłady cinie w kierownicy odrodkowej otrzymane z punktów odbioru cinienia na ciance od strony ssawnej 94
196 Linia prdu, wzdłu której na wykresach przedstawiono przebiegi cinie p c, p i prdkoci v Rys Rozkłady cinie w kierownicy odrodkowej otrzymane w wyniku oblicze i pomiarów Kolorem niebieskim zaznaczono punkty odbioru cinienia wraz ze zmierzonymi wartociami 95

197 96 Rys Porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze. Widok w kierunku osiowym

198 Rys Porównanie wektorów prdkoci w kierownicy odrodkowej otrzymanych z bada i oblicze. Widok perspektywiczny 97

199 98 Rys Rozkłady cinie otrzymane z punktów odbioru cinienia na ciankach kierownicy dorodkowej Od strony ssawnej - lewy kanał, od strony tłocznej - prawy kanał
200 Wybrana linia prdu w obszarze bezwirowego przepływu, wzdłu której na wykresach przedstawiono przebiegi cinie p, p i prdkoci v c Rys Rozkłady cinie otrzymane w wyniku oblicze i pomiarów Kolorem niebieskim zaznaczono punkty odbioru cinienia wraz ze zmierzonymi wartociami 99
201 Rys Porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze. Widok w kierunku osiowym Rys Wektory prdkoci zmierzone na wylocie z kierownicy dorodkowej sond S9 00

202 Rys Porównanie wektorów prdkoci w kierownicy dorodkowej otrzymanych z bada i oblicze. Widok perspektywiczny 8.4. Analiza porównawcza wyników oblicze numerycznych i pomiarów stopnia pompy odrodkowej wielostopniowej Wyniki pomiarów i oblicze zestawiono na tle rysunków kanałów przepływowych. Wyniki te pozwalaj na jakociow analiz. Natomiast dla analizy ilo- ciowej wyniki przedstawiono dwuwymiarowo. Parametry przepływowe dla wirnika zostały okrelone jedynie na drodze oblicze numerycznych i posłuyły do okrelenia warunków brzegowych dla oblicze kierownic. Porównujc otrzymane rozkłady pól cinienia statycznego (rys i 8.55), mona stwierdzi bardzo dobr zgodno wyników oblicze i pomiarów. W cz- ci dyfuzorowej kierownicy odrodkowej wystpuj małe rónice pomidzy cinieniami otrzymanymi z pomiarów i oblicze. Wiksze odchyłki wystpuj w obszarze oddziaływania wirnika. Zwizane jest to z niestacjonarnoci przepływu, natomiast model obliczeniowy zakładał przepływ stacjonarny (przepływ majcy charakter okresowo-osiowej symetrii). Porównujc rozkłady prdkoci pokazane na rysunkach 8.56 i 8.57, wida dobr zgodno profilu prdkoci w miejscu sondowania sond S z wynikami 0
203 oblicze numerycznych (rys. 8.5). wiadczy to o poprawnie wyznaczonych warunkach brzegowych przyjtych w obliczeniach obu kierownic. W pozostałych miejscach sondowania otrzymano wiksze rozbienoci. Porównujc rozkłady pokazane na rys i 8.57 mona wywnioskowa, i w rzeczywistym przepływie wystpuje bardziej rozwinita warstwa przycienna. Obrazuje to profil prdkoci w miejscu sondowania sond S3. Take profile prdkoci otrzymane w miejscach sondowania sondami S4 S7 wskazuj na mniej wyrównany profil prdkoci wzdłu podziałki. Porównujc otrzymane rozkłady pól cinienia statycznego (rys i 8.59), mona stwierdzi dobr zgodno wyników oblicze i pomiarów. Porównujc rozkłady prdkoci pokazane na rys. 8.6 i 8.6 wida dobr zgodno profilu prdkoci w miejscu sondowania sond S8 (rys. 8.8). W wyniku oblicze otrzymano mniejszy kt napływu cieczy w kierunku do kanału kierownicy dorodkowej. Przyczyn tego moe by przyjty model oblicze, zakładajcy jednakowy przepływ w kadym z kanałów. Znaczna rozbieno profili prdkoci w miejscu sondowania sond S9 (rys. 8.8) wynika z wstecznego oddziaływania łopatek wirnika II stopnia oraz znacznego zasilania dodatkowym prostopadłym w stosunku do głównego przepływu strumieniem masy pochodzcym z przecieków przez uszczelnienie przednie wirnika II stopnia. Obydwie te przyczyny nie zostały uwzgldnione w obliczeniach Badania numeryczne wybranych elementów układu hydraulicznego monoblokowej pompy jednostopniowej Numeryczne obliczenia przepływów trójwymiarowych wykonano dla wirnika i łopatkowej kierownicy promieniowo-osiowej. S to elementy układu hydraulicznego dla tego typu pomp, decydujce o przebiegu charakterystyki przepływu i poboru mocy pompy. Badania numeryczne przepływu przeprowadzono z wykorzystaniem tak zwanego własnego kodu numerycznego. Kod bazuje na dyskretyzacji pierwszego rzdu członu cinieniowego równania Naviera-Stokesa (8.), (8.), (8.3), (8.4) oraz algebraicznym modelu turbulencji Baldwina-Lomaxa [5], na podstawie którego wyznaczono lepko efektywn µ. 0 eff Poniewa model ten wprowadzono do istniejcego programu w postaci podprogramu (procedury napisanej w jzyku Fortran 77), obliczajcego lepko efektywn, zostanie on szczegółowo omówiony w podrozdziale Krzywoliniowy układ współrzdnych (x, x, x 3 ) opisany poprzez tensory metryczne nk g n ij, symbole Christofela Γ i jakobian przekształcenia I jest przedstawiony w [3]. Zastosowany algorytm rozwizania wykorzystuje metod objtoci skoczonej na przesunitej siatce (cinienia i składowe prdkoci przyporzdkowano w rónych wzłach siatki). Dyskretyzacja równa jest drugiego rzdu, z wyjtkiem czci konwekcyjnej, która jest pierwszego rzdu z aproksymacj pod
204 prd. Zastosowano metod korekcji cinienia do rozwizywania równa algebraicznych, bdcych rezultatem dyskretyzacji równa róniczkowych na siatce obliczeniowej. Program ma take moliwo oblicze równoległych, wykorzystujcych metod dekompozycji obszaru [46]. Metoda ta polega na podziale obliczanego kanału bd całego stopnia maszyny wirnikowej na mniejsze obszary, na których buduje si strukturaln siatk obliczeniow, tak aby ssiadujce ze sob obszary zachodziły na siebie o jeden krok siatki. W czasie procesu iteracyjnego ssiadujce obszary wymieniaj ze sob dane na brzegach zachodzcych na siebie obszarów. Jakie wielkoci i w któr stron s wymieniane, pokazano na rys Zalet oblicze równoległych jest krótszy czas oblicze o około 30-40% oraz mniejsze zapotrzebowanie na pami dla danego obszaru obliczeniowego. Rys Schemat wymiany danych w nachodzcych na siebie ssiadujcych obszarach obliczeniowych 3 v, v, v - kontrwariantne składowe prdkoci, p - cinienie (identycznie wyraana jest lepko), p - gradient cinienia; a) przypadek, gdy przepływ w obu obszarach jest w tym samym kierunku, b) przypadek, gdy przepływ w obu obszarach jest w przeciwnym kierunku 03
205 W analizowanym przypadku podzielono kanały hydrauliczne na dwie czci: zwizan z wirnikiem i przypisan kierownicy o przepływie promieniowoosiowym Warunki brzegowe Układ równa (8.) i (8.) jest z matematycznego punktu widzenia w pełni eliptycznym układem równa czstkowych, w zwizku z tym wymaga postawienia warunków brzegowych dotyczcych: profilu prdkoci na wlocie do obszaru obliczeniowego; w kadym wle siatki obliczeniowej na powierzchni wlotowej podane s odpowiednie składowe prdkoci, rozkładu i wartoci cinienia statycznego na wylocie z kanału obliczeniowego (rys. 8.64), zerowego gradientu cinienia statycznego na wylocie z kanału obliczeniowego, zerowania si prdkoci na ciankach kanału obliczeniowego, załoenia periodycznoci w kierunku x (siatk tak konstruowano, aby współrzdna x odpowiadała kierunkowi obwodowemu). 3 V =0, V =0 łopatka Vij =N, k V cinienie x x Vij =, k i=mb łopatka krawd wlotu i=me na łopatk wylot z łopatki obliczeniowa powierzchnia wlotowa obliczeniowa powierzchnia wylotowa Rys Przyporzdkowanie wartoci brzegowych do cianki W rozpatrywanych kanałach wirnika oraz kierownicy promieniowo-osiowej przyjto takie same warunki brzegowe jak do oblicze stopnia pompy wielostopniowej (w rozdziale 8.) z wyjtkiem modelu turbulencji. 04
206 8.5.. Model turbulencji W obliczeniach numerycznych przepływów przez kanały hydrauliczne pomp wykorzystano program z algebraicznym modelem turbulencji Baldwina-Lomaxa [5]. W zastosowanym do oblicze numerycznych programie z modelem turbulencji Baldwina-Lomaxa lepko efektywn do wyznaczania napre przedstawiono jako sum nastpujcych składników: µ eff = µ + µ T (8.59) gdzie: µ - lepko molekularna, µ T - lepko turbulentna. W obliczeniach µ T wyrónia si dwie strefy charakteryzowane odległoci y prostopadł do cianki (rys. 8.66) Strefa wewntrzna W strefie wewntrznej zastosowano równanie Prandtla-van Driesta: µ (in) = ρ l def (8.60) T gdzie: def - funkcja dyssypacji [3], zamiast tensora wirowoci Ω = Ω ij Ω ij proponowanego w [56], okrelona z zalenoci (8.6): def ij D D ij = (8.6) l - długo drogi mieszania. strefa zewntrzna strefa wewntrzna y Rys Odległo od cianki 05
207 Dla skali liniowej przyjto najprostsz formuł: l = κ y κ = 0,4 (8.6) Strefa zewntrzna 0, 068 F y max max (out) = min T 0, 5 y u (8.63) max DIF max gdzie: F - funkcja intermitencji (wpływu) Klebanowa okrelona jest wzorem (8.64). Przebieg tej funkcji przedstawiono na rys α y F = ymax W równaniach (8.63) i (8.64) stałe α i β wynosz α = 0,3 i β =,6. (8.64) F (y/y max) Rys Funkcja intermitencji Γ - funkcja deformacji okrelona wzorem (8.65): gdzie: def - funkcja dysypacji okrelona wzorem (8.6), y - odległo od cianki. = y def (8.65) 06
208 Γ Γ max y max y Rys Funkcja Γ W przebiegu tej funkcji wane jest max ( y max ). Do wzoru (8.63) wstawiono i max y obliczone z równa (8.65). Prdko u DIF w równaniu (8.63) okrelona jest zalenoci: u DIF = max ( u + v + w ) max ( u + v + w ) ( u + v + w ) max = Vmax min = (8.66) i stanowi ona rónic pomidzy maksymaln a minimaln wartoci prdkoci w danym przekroju. Poniewa minimalna prdko jest równa zeru na (ciance), wic przyjto maksymaln warto prdkoci w danym przekroju. µ T µ (in) T µ (out) T µ (out) T µ (in) T 0 y g y Rys Strefa wewntrzna i zewntrzna dla lepkoci turbulentnej 07
209 Granic stosowalnoci (in) (out) wyznaczono z warunku µ =. Dla Dla yg (in) (out) µ T i µ T ustalono wg rys. 8.68, natomiast y g T µ T (in) (out) T µ T y ma by µ ; przyjto (in) µ T = µ T. (in) (out) (out) y > yg jest µ T > µ T ; przyjto µ T = µ T Algorytm wyznaczenia lepkoci efektywnej schematem algebraicznym na podstawie modelu Baldwina-Lomaxa W [46] zastosowano algorytm, w którym we wszystkich wzłach głównych p wyznaczono funkcj dyssypacji, stosujc rachunek rónicowy dla wzłów pomocniczych i interpolujc wyniki na wzły główne. Interpolacj na wzły wewntrzne przeprowadzono przez wyznaczanie rednich arytmetycznych, z wyjtkiem wzłów przybrzegowych b, dla których stosowano rednie waone. P NB NB b B s B Rys Funkcja dyssypacji w wzłach cianki Tensor odkształcenia elementu płynu w punkcie b wyznaczono z wzoru: w którym w B i ij ij ij ij ( d + d ) + w ( d d ) ij d b = wb B B NB NB + NB (8.67) w NB s funkcjami wagowymi opisanymi zalenociami: w w B NB µ s = µ + µ s s b µ b = µ + µ b (8.68) 08
210 gdzie: µ b - lepko efektywna w punkcie b, µ - lepko umowna dla czci komórki przyległej do ciany obli- s czona wg algorytmu wykorzystywanego do oblicze µ s : ( + θ ( )) µ = H (8.69) s µ 0 b θ b gdzie: H ( θ b ) - funkcja opisujca rozkład logarytmiczny prdkoci w pobliu cianki, tzw. prawo cianki, µ 0 - lepko molekularna. Kolejno obliczono: µ ( µ µ ) b b 0 θ b = (8.70) µ 0 κ sb 0.86 s b = exp tb (8.7) 6 t b = µ b ( µ µ ) µ k 0 b 0 (8.7) Kolejno rachunków dla kadego wzła b przyległego do ciany jest nastpujca: t wzór (8.7) b s wzór (8.7) b θ wzór (8.70) b µ wzór (8.69) s w B i w NB wzór (8.68) ij d b wzór (8.67) Funkcje dyssypacji obliczono według wzoru: ij mn D p = gin g jn d d (sumowanie po i, j, m, n). (8.73) Dla wszystkich wzłów wewntrznych P obliczono: dla s = p (warto pocztkowa) µ p i θ p : µ p = ρ κ yp Dp sp = ρ κ yp dp (8.74) 09
211 θ = p µ µ µ κ s 0 (in) p a nastpnie wyznaczono s p z wzoru: p p = µ (in) p µ µ κ 0 p (8.75) s p θ p = exp ; gdzie: A = 6 (stała van Driesta) (8.76) A (in) p a nastpnie znajdowano punkt P, dla którego: = max P Pi = y s D (8.77) p p p p p p = y s (8.78) y max = y p p ( ) Pi (8.79) Dla wszystkich wzłów głównych wyznaczono lepko turbulentn jak dla podwarstwy wewntrznej: ( y ) max ymax F (out) p p = min (8.80) 0, 5 ymax udif max gdzie: F - funkcja intermitencji wg wzoru (8.64), u dif - V max wg wzoru (8.65). Dla wszystkich wzłów wewntrznych wyznaczono lepko efektywn, χ = : stosujc podrelaksacj ze współczynnikiem ( ) µ eff = µ 0 + p p ( χ )( µ p µ 0 ) + (out) (in) min ( µ, µ ) µ (out) jeeli p y p > y max jeeli y p y max (8.8) Algorytm oblicze Do oblicze trójwymiarowych wykorzystano pakiet programów NSE (Navier-Stokes Eliptyczny) napisanych w jzyku programowania Fortran 77. Kod procedury obliczajcej lepko efektywn został opracowany i zastosowany midzy innymi w pracy []. Jako preprocesor wykorzystano procedury napisane w [45] w jzyku AutoLisp i działajce w rodowisku graficznym AutoCada. Schemat blokowy oblicze przedstawiono, za prac [], poniej. 0
212
213 Rys Schemat blokowy metody oblicze numerycznych Procedury te pozwalaj, na podstawie narysowanej w AutoCadzie geometrii, stworzy w sposób interaktywny siatk obliczeniow. Jako postprocesor wykorzystano komercyjny program Tecplot firmy Amtec, pozwalajcy graficznie przedstawi rozkłady pól prdkoci i cinie Wyniki oblicze numerycznych przepływu trójwymiarowego w elementach układu hydraulicznego pompy monoblokowej jednostopniowej Przepływ w wirniku pompy Badania numeryczne przepływu w wirniku przeprowadzono metod opisan w rozdziale 8.. Geometria wirnika została przedstawiona na rys Na rysunku tym pokazano równie załoone przedłuenia obliczeniowe obszaru wlotowego i wylotowego dla jednego z kanałów wirnika, w którym stawiane s warunki brzegowe do oblicze. Obliczenia wykonano dla szerokiego zakresu zmian wydajnoci. Przyjta siatka obliczeniowa dla wirnika, łcznie z przedłuonymi obszarami na wlocie i wylocie, została przedstawiona na rys Wylotowy, jak i wlotowy, obszar obliczeniowy ukształtowano, prowadzc linie siatki x w kierunku 3 promieniowym, x w kierunku obwodowym, x w kierunku osiowym. Rozmiary siatek obliczanego wirnika: 40x4x3. Rozkłady wektorów prdkoci wzgldnych w wirniku pompy dla wydajnoci nominalnej, przedstawiono na rysunkach: w pobliu tarczy przedniej - rys. 8.73, w przekroju na rodkowej powierzchni prdu - rys. 8.74, w pobliu tarczy tylnej - rys


214 Rys Geometria wirnika Rys Siatka do oblicze numerycznych przepływu przez wirnik 3
215 Rys Wektory prdkoci wzgldnych w pobliu tarczy przedniej wirnika Rys Wektory prdkoci wzgldnych i rozkład cinienia statycznego na rodkowej powierzchni prdu 4
216 Rys Wektory prdkoci wzgldnych w przekroju w pobliy tarczy tylnej wirnika Natomiast na rys pokazano równie rozkłady cinienia statycznego wzdłu długoci kanału dla wydajnoci nominalnej Przepływ w kierownicy promieniowo-osiowej Analogicznie do oblicze wirników wykonano obliczenia numeryczne przepływu w kierownicy pompy. Geometri kierownicy przedstawiono na rys Pokazano na nim równie obliczeniowe przedłuenie obszaru wlotowego i wylotowego jednego z kanałów, dla których zadawane s warunki brzegowe do oblicze. W tym przypadku, zgodnie z rozdziałem 8.5, przyjmowano, e na wlocie do obszaru obliczeniowego parametry odpowiadaj parametrom wylotowym z wirnika, natomiast w płaszczynie wylotowej obszaru obliczeniowego kierownicy załoono stało cinienia statycznego. 5


217 Rys Geometria kierownicy Rys Siatka do oblicze numerycznych przepływu przez kierownic 6


218 Linie prdu Rys Wektory prdkoci wzgldnych w kierownicy pompy na powierzchni zewntrznej Linie prdu Rys Wektory prdkoci wzgldnych w kierownicy pompy na redniej powierzchni prdu 7
WYKŁAD 11 POMPY I UKŁADY POMPOWE
 WYKŁAD 11 POMPY I UKŁADY POMPOWE Historia Czerpak do wody używany w Egipcie ok. 1500 r.p.n.e. Historia Nawadnianie pól w Chinach Historia Koło wodne używane w Rzymie Ogólna klasyfikacja pomp POMPY POMPY
WYKŁAD 11 POMPY I UKŁADY POMPOWE Historia Czerpak do wody używany w Egipcie ok. 1500 r.p.n.e. Historia Nawadnianie pól w Chinach Historia Koło wodne używane w Rzymie Ogólna klasyfikacja pomp POMPY POMPY
OBIEKTY ELEKTROWNI WODNEJ
 ! OBIEKTY ELEKTROWNI WODNEJ RÓWNANIE BERNOULLIEGO Równanie Bernoulliego opisuje ruch płynu i ma trzy składowe: - składow prdkoci - (energia kinetyczna ruchu), - składow połoenia (wysokoci) - (energia potencjalna),
! OBIEKTY ELEKTROWNI WODNEJ RÓWNANIE BERNOULLIEGO Równanie Bernoulliego opisuje ruch płynu i ma trzy składowe: - składow prdkoci - (energia kinetyczna ruchu), - składow połoenia (wysokoci) - (energia potencjalna),
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI ĆWICZENIE NR 7 BADANIE POMPY II
 INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI Laboratorium z mechaniki płynów ĆWICZENIE NR 7 BADANIE POMPY II 2 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z budową i działaniem
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI Laboratorium z mechaniki płynów ĆWICZENIE NR 7 BADANIE POMPY II 2 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z budową i działaniem
Zasady doboru zaworów regulacyjnych przelotowych - powtórka
 Trójdrogowe zawory regulacyjne Wykład 5 Zasady doboru zaworów regulacyjnych przelotowych - powtórka Podstaw do doboru rednicy nominalnej zaworu regulacyjnego jest obliczenie współczynnika przepływu Kvs
Trójdrogowe zawory regulacyjne Wykład 5 Zasady doboru zaworów regulacyjnych przelotowych - powtórka Podstaw do doboru rednicy nominalnej zaworu regulacyjnego jest obliczenie współczynnika przepływu Kvs
J. Szantyr Wykład 26bis Podstawy działania pomp wirnikowych. a) Układ ssący b) Układ tłoczący c) Układ ssąco-tłoczący
 Układ ssący b) Układ tłoczący c) Układ ssąco-tłoczący") J. Szantyr Wykład 26bis Podstawy działania pomp wirnikowych Pompy dzielimy ogólnie na wyporowe i wirowe. Jedną z kategorii pomp wirowych są pompy wirnikowe, które z kolei dzielimy na: odśrodkowe, helikoidalne,
J. Szantyr Wykład 26bis Podstawy działania pomp wirnikowych Pompy dzielimy ogólnie na wyporowe i wirowe. Jedną z kategorii pomp wirowych są pompy wirnikowe, które z kolei dzielimy na: odśrodkowe, helikoidalne,
Zasada działania maszyny przepływowej.
 Zasada działania maszyny przepływowej. Przyrost ciśnienia statycznego. Rys. 1. Izotermiczny schemat wirnika maszyny przepływowej z kanałem miedzy łopatkowym. Na rys.1. pokazano schemat wirnika maszyny
Zasada działania maszyny przepływowej. Przyrost ciśnienia statycznego. Rys. 1. Izotermiczny schemat wirnika maszyny przepływowej z kanałem miedzy łopatkowym. Na rys.1. pokazano schemat wirnika maszyny
ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ
 ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ 1. Cel i zakres ćwiczenia Celem ćwiczenia jest opanowanie umiejętności dokonywania pomiarów parametrów roboczych układu pompowego. Zapoznanie z budową
ĆWICZENIE WYZNACZANIE CHARAKTERYSTYK POMPY WIROWEJ 1. Cel i zakres ćwiczenia Celem ćwiczenia jest opanowanie umiejętności dokonywania pomiarów parametrów roboczych układu pompowego. Zapoznanie z budową
Elementy pneumatyczne
 POLITECHNIKA LSKA W GLIWICACH WYDZIAŁ INYNIERII RODOWISKA i ENERGETYKI INSTYTUT MASZYN i URZDZE ENERGETYCZNYCH Elementy pneumatyczne Laboratorium automatyki (A 3) Opracował: dr in. Jacek Łyczko Sprawdził:
POLITECHNIKA LSKA W GLIWICACH WYDZIAŁ INYNIERII RODOWISKA i ENERGETYKI INSTYTUT MASZYN i URZDZE ENERGETYCZNYCH Elementy pneumatyczne Laboratorium automatyki (A 3) Opracował: dr in. Jacek Łyczko Sprawdził:
SPRĘŻ WENTYLATORA stosunek ciśnienia statycznego bezwzględnego w płaszczyźnie
 DEFINICJE OGÓLNE I WIELKOŚCI CHARAKTERYSTYCZNE WENTYLATORA WENTYLATOR maszyna wirnikowa, która otrzymuje energię mechaniczną za pomocą jednego wirnika lub kilku wirników zaopatrzonych w łopatki, użytkuje
DEFINICJE OGÓLNE I WIELKOŚCI CHARAKTERYSTYCZNE WENTYLATORA WENTYLATOR maszyna wirnikowa, która otrzymuje energię mechaniczną za pomocą jednego wirnika lub kilku wirników zaopatrzonych w łopatki, użytkuje
MECHANIKA PŁYNÓW LABORATORIUM
 MECANIKA PŁYNÓW LABORATORIUM Ćwiczenie nr 4 Współpraca pompy z układem przewodów. Celem ćwiczenia jest sporządzenie charakterystyki pojedynczej pompy wirowej współpracującej z układem przewodów, przy różnych
MECANIKA PŁYNÓW LABORATORIUM Ćwiczenie nr 4 Współpraca pompy z układem przewodów. Celem ćwiczenia jest sporządzenie charakterystyki pojedynczej pompy wirowej współpracującej z układem przewodów, przy różnych
Wykład 5 WIELKOŚCI CHARAKTERYSTYCZNE POMP WIROWYCH SYMBOLE, NAZWY, OKREŚLENIA I ZALEŻNOŚCI PODSTAWOWYCH WIELKOŚCI CHARAKTERYZUJĄCYCH
 Wykład 5 WIELKOŚCI CHARAKTERYSTYCZNE POMP WIROWYCH SYMBOLE, NAZWY, OKREŚLENIA I ZALEŻNOŚCI PODSTAWOWYCH WIELKOŚCI CHARAKTERYZUJĄCYCH POMPĘ I WARUNKI JEJ PRACY Symbol, Nazwa, określenie, zależność Jednostka
Wykład 5 WIELKOŚCI CHARAKTERYSTYCZNE POMP WIROWYCH SYMBOLE, NAZWY, OKREŚLENIA I ZALEŻNOŚCI PODSTAWOWYCH WIELKOŚCI CHARAKTERYZUJĄCYCH POMPĘ I WARUNKI JEJ PRACY Symbol, Nazwa, określenie, zależność Jednostka
Turbiny z napływem promieniowym stosowane są wówczas kiedy niezbędne jest małe (zwarte) źródło mocy
 źródło mocy") Nazwa turbin pochodzi od tego, że przepływ odchyla się od kierunku promieniowego do osiowego, stąd turbiny z napływem promieniowym 90 o (dziewięćdziesięciostopniowe) 0. Wstęp Turbiny z napływem promieniowym
Nazwa turbin pochodzi od tego, że przepływ odchyla się od kierunku promieniowego do osiowego, stąd turbiny z napływem promieniowym 90 o (dziewięćdziesięciostopniowe) 0. Wstęp Turbiny z napływem promieniowym
Obliczanie hydrauliczne przewodów Charakterystyczne parametry
 Wst p Obliczanie hydrauliczne przewodów Charakterystyczne parametry Autor: dr in. S awomir awomir RABCZAK Wst p - historia. Czerpak do wody u ywany w Egipcie ok. 1500 r.p.n.e. (pompa czerpalna) Wst p -
Wst p Obliczanie hydrauliczne przewodów Charakterystyczne parametry Autor: dr in. S awomir awomir RABCZAK Wst p - historia. Czerpak do wody u ywany w Egipcie ok. 1500 r.p.n.e. (pompa czerpalna) Wst p -
J. Szantyr Wykład nr 27 Przepływy w kanałach otwartych I
 J. Szantyr Wykład nr 7 Przepływy w kanałach otwartych Przepływy w kanałach otwartych najczęściej wymuszane są działaniem siły grawitacji. Jako wstępny uproszczony przypadek przeanalizujemy spływ warstwy
J. Szantyr Wykład nr 7 Przepływy w kanałach otwartych Przepływy w kanałach otwartych najczęściej wymuszane są działaniem siły grawitacji. Jako wstępny uproszczony przypadek przeanalizujemy spływ warstwy
. Cel ćwiczenia Celem ćwiczenia jest porównanie na drodze obserwacji wizualnej przepływu laminarnego i turbulentnego, oraz wyznaczenie krytycznej licz
 ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI ABORATORIUM MECHANIKI PŁYNÓW ĆWICZENIE NR DOŚWIADCZENIE REYNODSA: WYZNACZANIE KRYTYCZNEJ ICZBY REYNODSA opracował: Piotr Strzelczyk Rzeszów 997 . Cel ćwiczenia Celem
ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI ABORATORIUM MECHANIKI PŁYNÓW ĆWICZENIE NR DOŚWIADCZENIE REYNODSA: WYZNACZANIE KRYTYCZNEJ ICZBY REYNODSA opracował: Piotr Strzelczyk Rzeszów 997 . Cel ćwiczenia Celem
Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie
 Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie PODOBIEŃSTWO W WENTYLATORACH TYPOSZEREGI SMIUE Prowadzący: mgr inż. Tomasz Siwek siwek@agh.edu.pl 1. Wstęp W celu umożliwienia porównywania
Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie PODOBIEŃSTWO W WENTYLATORACH TYPOSZEREGI SMIUE Prowadzący: mgr inż. Tomasz Siwek siwek@agh.edu.pl 1. Wstęp W celu umożliwienia porównywania
J. Szantyr Wykład 2 - Podstawy teorii wirnikowych maszyn przepływowych
 J. Szantyr Wykład 2 - Podstawy teorii wirnikowych maszyn przepływowych a) Wentylator lub pompa osiowa b) Wentylator lub pompa diagonalna c) Sprężarka lub pompa odśrodkowa d) Turbina wodna promieniowo-
J. Szantyr Wykład 2 - Podstawy teorii wirnikowych maszyn przepływowych a) Wentylator lub pompa osiowa b) Wentylator lub pompa diagonalna c) Sprężarka lub pompa odśrodkowa d) Turbina wodna promieniowo-
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL FUNDACJA ROZWOJU KARDIOCHIRURGII IM. PROF. ZBIGNIEWA RELIGI, Zabrze, PL
 PL 216284 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216284 (13) B1 (21) Numer zgłoszenia: 390781 (51) Int.Cl. F04D 29/28 (2006.01) F04D 29/26 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 216284 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216284 (13) B1 (21) Numer zgłoszenia: 390781 (51) Int.Cl. F04D 29/28 (2006.01) F04D 29/26 (2006.01) Urząd Patentowy Rzeczypospolitej
OPŁYW PROFILU. Ciała opływane. profile lotnicze łopatki. Rys. 1. Podział ciał opływanych pod względem aerodynamicznym
 OPŁYW PROFILU Ciała opływane Nieopływowe Opływowe walec kula profile lotnicze łopatki spoilery sprężarek wentylatorów turbin Rys. 1. Podział ciał opływanych pod względem aerodynamicznym Płaski np. z blachy
OPŁYW PROFILU Ciała opływane Nieopływowe Opływowe walec kula profile lotnicze łopatki spoilery sprężarek wentylatorów turbin Rys. 1. Podział ciał opływanych pod względem aerodynamicznym Płaski np. z blachy
Opory przepływu powietrza w instalacji wentylacyjnej
 Wentylacja i klimatyzacja 2 -ćwiczenia- Opory przepływu powietrza w instalacji wentylacyjnej Przepływ powietrza w przewodach wentylacyjnych Powietrze dostarczane jest do pomieszczeń oraz z nich usuwane
Wentylacja i klimatyzacja 2 -ćwiczenia- Opory przepływu powietrza w instalacji wentylacyjnej Przepływ powietrza w przewodach wentylacyjnych Powietrze dostarczane jest do pomieszczeń oraz z nich usuwane
Napd i sterowanie hydrauliczne i pneumatyczne
 Napd i sterowanie hydrauliczne i pneumatyczne Hydraulika wykład 3 Układ hydrauliczny Ogólny schemat blokowy układu hydrostatycznego Układ hydrauliczny Przekazywanie poszczególnych form energii: 1. dostarczanie
Napd i sterowanie hydrauliczne i pneumatyczne Hydraulika wykład 3 Układ hydrauliczny Ogólny schemat blokowy układu hydrostatycznego Układ hydrauliczny Przekazywanie poszczególnych form energii: 1. dostarczanie
Parametry układu pompowego oraz jego bilans energetyczny
 Parametry układu pompowego oraz jego bilans energetyczny Układ pompowy Pompa może w zasadzie pracować tylko w połączeniu z przewodami i niezbędną armaturą, tworząc razem układ pompowy. W układzie tym pompa
Parametry układu pompowego oraz jego bilans energetyczny Układ pompowy Pompa może w zasadzie pracować tylko w połączeniu z przewodami i niezbędną armaturą, tworząc razem układ pompowy. W układzie tym pompa
PROFIL PRĘDKOŚCI W RURZE PROSTOLINIOWEJ
 LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N 7 PROFIL PRĘDKOŚCI W RURZE PROSTOLINIOWEJ . Cel ćwiczenia Doświadczalne i teoretyczne wyznaczenie profilu prędkości w rurze prostoosiowej 2. Podstawy teoretyczne:
LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N 7 PROFIL PRĘDKOŚCI W RURZE PROSTOLINIOWEJ . Cel ćwiczenia Doświadczalne i teoretyczne wyznaczenie profilu prędkości w rurze prostoosiowej 2. Podstawy teoretyczne:
1. Klasyfi kacja i zasady działania pomp i innych przenośników cieczy 2. Parametry pracy pompy i układu pompowego
 Spis treści Przedmowa................................................................... 11 Wykaz ważniejszych oznaczeń................................................... 13 1. Klasyfikacja i zasady działania
Spis treści Przedmowa................................................................... 11 Wykaz ważniejszych oznaczeń................................................... 13 1. Klasyfikacja i zasady działania
( ) ( ) ( ) ( ) 0,
 ( ) ( ) ( ) 0,") Dobór zestawu hydroforowego PN-9/B-176 Wyznaczenie obliczeniowego unktu racy urzdzenia: 1. Wydajnoci / strumienia rzeływu wody Q O Obl ( ) 45 3 3, 68 14; dm s, m h Q = q =, Σ q, ( ), 1 3 3 Q = q = 1, 7
Dobór zestawu hydroforowego PN-9/B-176 Wyznaczenie obliczeniowego unktu racy urzdzenia: 1. Wydajnoci / strumienia rzeływu wody Q O Obl ( ) 45 3 3, 68 14; dm s, m h Q = q =, Σ q, ( ), 1 3 3 Q = q = 1, 7
Pomiar i nastawianie luzu w osiach posuwowych obrotowych
 Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Pomiar i nastawianie luzu w osiach posuwowych obrotowych Cykl II Ćwiczenie 1 1. CEL
Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Pomiar i nastawianie luzu w osiach posuwowych obrotowych Cykl II Ćwiczenie 1 1. CEL
Aerodynamika i mechanika lotu
 Płynem nazywamy ciało łatwo ulegające odkształceniom postaciowym. Przeciwieństwem płynu jest ciało stałe, którego odkształcenie wymaga przyłożenia stosunkowo dużego naprężenia (siły). Ruch ciała łatwo
Płynem nazywamy ciało łatwo ulegające odkształceniom postaciowym. Przeciwieństwem płynu jest ciało stałe, którego odkształcenie wymaga przyłożenia stosunkowo dużego naprężenia (siły). Ruch ciała łatwo
Napd i sterowanie hydrauliczne i pneumatyczne
 Napd i sterowanie hydrauliczne i pneumatyczne Hydraulika wykład 2 Moduły stabilizacji jazdy RSM Układ ten pracuje na zasadzie tłumienia przez akumulator o odpowiedniej pojemnoci ruchu dwóch mas łyki z
Napd i sterowanie hydrauliczne i pneumatyczne Hydraulika wykład 2 Moduły stabilizacji jazdy RSM Układ ten pracuje na zasadzie tłumienia przez akumulator o odpowiedniej pojemnoci ruchu dwóch mas łyki z
Aerodynamika i mechanika lotu
 Prędkość określana względem najbliższej ścianki nazywana jest prędkością względną (płynu) w. Jeśli najbliższa ścianka porusza się względem ciał bardziej oddalonych, to prędkość tego ruchu nazywana jest
Prędkość określana względem najbliższej ścianki nazywana jest prędkością względną (płynu) w. Jeśli najbliższa ścianka porusza się względem ciał bardziej oddalonych, to prędkość tego ruchu nazywana jest
RÓWNANIE MOMENTÓW PĘDU STRUMIENIA
 RÓWNANIE MOMENTÓW PĘDU STRUMIENIA Przepływ osiowo-symetryczny ustalony to przepływ, w którym parametry nie zmieniają się wzdłuż okręgów o promieniu r, czyli zależą od promienia r i długości z, a nie od
RÓWNANIE MOMENTÓW PĘDU STRUMIENIA Przepływ osiowo-symetryczny ustalony to przepływ, w którym parametry nie zmieniają się wzdłuż okręgów o promieniu r, czyli zależą od promienia r i długości z, a nie od
LABORATORIUM MECHANIKI PŁYNÓW
 Ćwiczenie numer 5 Wyznaczanie rozkładu prędkości przy przepływie przez kanał 1. Wprowadzenie Stanowisko umożliwia w eksperymentalny sposób zademonstrowanie prawa Bernoulliego. Układ wyposażony jest w dyszę
Ćwiczenie numer 5 Wyznaczanie rozkładu prędkości przy przepływie przez kanał 1. Wprowadzenie Stanowisko umożliwia w eksperymentalny sposób zademonstrowanie prawa Bernoulliego. Układ wyposażony jest w dyszę
PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO
 PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO Wskazujemy podstawowe wymagania jakie muszą być spełnione dla prawidłowego doboru pompy, w tym: dobór układu konstrukcyjnego pompy, parametry pompowanego
PROCEDURA DOBORU POMP DLA PRZEMYSŁU CUKROWNICZEGO Wskazujemy podstawowe wymagania jakie muszą być spełnione dla prawidłowego doboru pompy, w tym: dobór układu konstrukcyjnego pompy, parametry pompowanego
Badania wentylatora. Politechnika Lubelska. Katedra Termodynamiki, Mechaniki Płynów. i Napędów Lotniczych. Instrukcja laboratoryjna
 Politechnika Lubelska i Napędów Lotniczych Instrukcja laboratoryjna Badania wentylatora /. Cel ćwiczenia Celem ćwiczenia jest zapoznanie z budową i metodami badań podstawowych typów wentylatorów. II. Wprowadzenie
Politechnika Lubelska i Napędów Lotniczych Instrukcja laboratoryjna Badania wentylatora /. Cel ćwiczenia Celem ćwiczenia jest zapoznanie z budową i metodami badań podstawowych typów wentylatorów. II. Wprowadzenie
Laboratorium komputerowe z wybranych zagadnień mechaniki płynów
 FORMOWANIE SIĘ PROFILU PRĘDKOŚCI W NIEŚCIŚLIWYM, LEPKIM PRZEPŁYWIE PRZEZ PRZEWÓD ZAMKNIĘTY Cel ćwiczenia Celem ćwiczenia będzie analiza formowanie się profilu prędkości w trakcie przepływu płynu przez
FORMOWANIE SIĘ PROFILU PRĘDKOŚCI W NIEŚCIŚLIWYM, LEPKIM PRZEPŁYWIE PRZEZ PRZEWÓD ZAMKNIĘTY Cel ćwiczenia Celem ćwiczenia będzie analiza formowanie się profilu prędkości w trakcie przepływu płynu przez
ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 1
 ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 1 ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 2 ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 3 OBIEKTY ELEKTROWNI WODNEJ URZDZENIA I UKŁADY TECHNOLOGICZNE ELEKTROWNI WODNYCH
ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 1 ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 2 ENERGIA CIEKU I MOC ELEKTROWNI WODNEJ - 3 OBIEKTY ELEKTROWNI WODNEJ URZDZENIA I UKŁADY TECHNOLOGICZNE ELEKTROWNI WODNYCH
Nieustalony wypływ cieczy ze zbiornika przewodami o różnej średnicy i długości
 LABORATORIUM MECHANIKI PŁYNÓW Nieustalony wypływ cieczy ze zbiornika przewodami o różnej średnicy i długości dr inż. Jerzy Wiejacha ZAKŁAD APARATURY PRZEMYSŁOWEJ POLITECHNIKA WARSZAWSKA, WYDZ. BMiP, PŁOCK
LABORATORIUM MECHANIKI PŁYNÓW Nieustalony wypływ cieczy ze zbiornika przewodami o różnej średnicy i długości dr inż. Jerzy Wiejacha ZAKŁAD APARATURY PRZEMYSŁOWEJ POLITECHNIKA WARSZAWSKA, WYDZ. BMiP, PŁOCK
Awarie. 4 awarie do wyboru objawy, możliwe przyczyny, sposoby usunięcia. (źle dobrana pompa nie jest awarią)
") Awarie 4 awarie do wyboru objawy możliwe przyczyny sposoby usunięcia (źle dobrana pompa nie jest awarią) Natężenie przepływu DANE OBLICZENIA WYNIKI Qś r d M k q j m d 3 Mk- ilość mieszkańców równoważnych
Awarie 4 awarie do wyboru objawy możliwe przyczyny sposoby usunięcia (źle dobrana pompa nie jest awarią) Natężenie przepływu DANE OBLICZENIA WYNIKI Qś r d M k q j m d 3 Mk- ilość mieszkańców równoważnych
OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH
 ĆWICZENIE II OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z metodą określania oporów przepływu w przewodach. 2. LITERATURA 1. Informacje z wykładów i ćwiczeń
ĆWICZENIE II OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z metodą określania oporów przepływu w przewodach. 2. LITERATURA 1. Informacje z wykładów i ćwiczeń
Zakład Podstaw Konstrukcji i Maszyn Przepływowych. Politechnika Wrocławska. Wydział Mechaniczno-Energetyczny INSTRUKCJA
 Zakład Podstaw Konstrukcji i Maszyn Przepływowych Instytut InŜynierii Lotniczej, Procesowej i Maszyn Energetycznych Politechnika Wrocławska Wydział Mechaniczno-Energetyczny INSTRUKCJA 11.a. WYZNACZANIE
Zakład Podstaw Konstrukcji i Maszyn Przepływowych Instytut InŜynierii Lotniczej, Procesowej i Maszyn Energetycznych Politechnika Wrocławska Wydział Mechaniczno-Energetyczny INSTRUKCJA 11.a. WYZNACZANIE
MODEL DWUWYMIAROWY PRZEPŁYWU PRZEZ STOPIEŃ MODELOWEJ TURBINY WODNEJ ORAZ JEGO EKSPERYMENTALNA WERYFIKACJA
 Międzynarodowa konferencja naukowo-techniczna Hydrauliczne maszyny wirnikowe w energetyce wodnej i innych działach gospodarki Kliczków, 7-9 grudnia 005 MODEL DWUWYMIAROWY PRZEPŁYWU PRZEZ STOPIEŃ MODELOWEJ
Międzynarodowa konferencja naukowo-techniczna Hydrauliczne maszyny wirnikowe w energetyce wodnej i innych działach gospodarki Kliczków, 7-9 grudnia 005 MODEL DWUWYMIAROWY PRZEPŁYWU PRZEZ STOPIEŃ MODELOWEJ
LABORATORIUM ELEKTROTECHNIKI SILNIK ASYNCHRONICZNY I (E-12)
") POLTECHNKA LSKA WYDZAŁ NYNER RODOWSKA ENERGETYK NSTYTUT MASZYN URZDZE ENERGETYCZNYCH LABORATORUM ELEKTROTECHNK SLNK ASYNCHRONCZNY (E-) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in. Jan Około-Kułak Sprawdził:
POLTECHNKA LSKA WYDZAŁ NYNER RODOWSKA ENERGETYK NSTYTUT MASZYN URZDZE ENERGETYCZNYCH LABORATORUM ELEKTROTECHNK SLNK ASYNCHRONCZNY (E-) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in. Jan Około-Kułak Sprawdził:
Przepływ cieczy w pompie wirowej. Podstawy teoretyczne i kinematyka przepływu przez wirniki pomp wirowych.
 Przepływ cieczy w pompie wirowej W zależności od ukształtowania wirnika pompy wirowe dzielimy na : - pompy odśrodkowe, - pompy diagonalne i helikoidalne, - pompy śmigłowe. Rys. 3.1. Powierzchnie prądu
Przepływ cieczy w pompie wirowej W zależności od ukształtowania wirnika pompy wirowe dzielimy na : - pompy odśrodkowe, - pompy diagonalne i helikoidalne, - pompy śmigłowe. Rys. 3.1. Powierzchnie prądu
Statyczna próba skrcania
 Laboratorium z Wytrzymałoci Materiałów Statyczna próba skrcania Instrukcja uzupełniajca Opracował: Łukasz Blacha Politechnika Opolska Katedra Mechaniki i PKM Opole, 2011 2 Wprowadzenie Do celów wiczenia
Laboratorium z Wytrzymałoci Materiałów Statyczna próba skrcania Instrukcja uzupełniajca Opracował: Łukasz Blacha Politechnika Opolska Katedra Mechaniki i PKM Opole, 2011 2 Wprowadzenie Do celów wiczenia
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr Eksperymentalne wyznaczenie charakteru oporów w przewodach hydraulicznych opory liniowe Opracowanie: Z.Kudżma, P. Osiński J. Rutański,
Dodatek 1. Czopy kocowe walcowe wałów wg PN-M-85000:1998. D1.1. Wzory obliczeniowe dopuszczalnych momentów obrotowych
 Praca domowa nr 3. Dodatek Strona 1 z 23 Dodatek 1. Czopy kocowe walcowe wałów wg PN-M-85000:1998 Norm PN-M-85000 objto wymiary czopów kocowych walcowych wałów (długich i krótkich) oraz czopów stokowych
Praca domowa nr 3. Dodatek Strona 1 z 23 Dodatek 1. Czopy kocowe walcowe wałów wg PN-M-85000:1998 Norm PN-M-85000 objto wymiary czopów kocowych walcowych wałów (długich i krótkich) oraz czopów stokowych
KLUCZ ODPOWIEDZI DO ZADA ZAMKNITYCH POPRAWNA ODPOWIED 1 D 2 C 3 C 4 B 5 D 6 A 7 D 8 D 9 A 10 C 11 B 12 A 13 A 14 B 15 D 16 B 17 C 18 A 19 B 20 D
 KLUCZ ODPOWIEDZI DO ZADA ZAMKNITYCH NR ZADANIA POPRAWNA ODPOWIED D C 3 C 4 B 5 D 6 A 7 D 8 D 9 A 0 C B A 3 A 4 B 5 D 6 B 7 C 8 A 9 B 0 D Zadanie ( pkt) MODEL OCENIANIA ZADAN OTWARTYCH Uzasadnij, e punkty
KLUCZ ODPOWIEDZI DO ZADA ZAMKNITYCH NR ZADANIA POPRAWNA ODPOWIED D C 3 C 4 B 5 D 6 A 7 D 8 D 9 A 0 C B A 3 A 4 B 5 D 6 B 7 C 8 A 9 B 0 D Zadanie ( pkt) MODEL OCENIANIA ZADAN OTWARTYCH Uzasadnij, e punkty
W zależności od kierunku przepływu cieczy przez wirnik dzielimy pompy na:
 Pompy wirowe Pompy wirowe należą do grupy maszyn wirnikowych. Ich zasada działania polega więc na zwiększaniu krętu cieczy w wirniku (tj. organie roboczym) zaopatrzonym w łopatki i obracającym się ze stałą
Pompy wirowe Pompy wirowe należą do grupy maszyn wirnikowych. Ich zasada działania polega więc na zwiększaniu krętu cieczy w wirniku (tj. organie roboczym) zaopatrzonym w łopatki i obracającym się ze stałą
Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym
 1 Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wentylatory są niezbędnym elementem systemów wentylacji
1 Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wydajne wentylatory promieniowe Fulltech o wysokim ciśnieniu statycznym Wentylatory są niezbędnym elementem systemów wentylacji
OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH
 ĆWICZENIE II OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z metodą określania oporów przepływu w przewodach. 2. LITERATURA 1. Informacje z wykładów i ćwiczęń
ĆWICZENIE II OPORY PRZEPŁYWU PRZEWODÓW WENTYLACYJNYCH 1. CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z metodą określania oporów przepływu w przewodach. 2. LITERATURA 1. Informacje z wykładów i ćwiczęń
prędkości przy przepływie przez kanał
 Ćwiczenie numer 5 Wyznaczanie rozkładu prędkości przy przepływie przez kanał 1. Wprowadzenie Stanowisko umożliwia w eksperymentalny sposób zademonstrowanie prawa Bernoulliego. Układ wyposażony jest w dyszę
Ćwiczenie numer 5 Wyznaczanie rozkładu prędkości przy przepływie przez kanał 1. Wprowadzenie Stanowisko umożliwia w eksperymentalny sposób zademonstrowanie prawa Bernoulliego. Układ wyposażony jest w dyszę
LABORATORIUM MECHANIKI PŁYNÓW
 Ćwiczenie numer 2 Pomiar współczynnika oporu liniowego 1. Wprowadzenie Stanowisko służy do analizy zjawiska liniowych strat energii podczas przepływu laminarnego i turbulentnego przez rurociąg mosiężny
Ćwiczenie numer 2 Pomiar współczynnika oporu liniowego 1. Wprowadzenie Stanowisko służy do analizy zjawiska liniowych strat energii podczas przepływu laminarnego i turbulentnego przez rurociąg mosiężny
Pomiar pompy wirowej
 Pomiar pompy wirowej Instrukcja do ćwiczenia nr 20 Badanie maszyn - laboratorium Opracował: dr inŝ. Andrzej Tatarek Zakład Miernictwa i Ochrony Atmosfery Wrocław, grudzień 2006 r. 1. Wstęp Pompami nazywamy
Pomiar pompy wirowej Instrukcja do ćwiczenia nr 20 Badanie maszyn - laboratorium Opracował: dr inŝ. Andrzej Tatarek Zakład Miernictwa i Ochrony Atmosfery Wrocław, grudzień 2006 r. 1. Wstęp Pompami nazywamy
Mechanika płynów : laboratorium / Jerzy Sawicki. Bydgoszcz, Spis treści. Wykaz waŝniejszych oznaczeń 8 Przedmowa
 Mechanika płynów : laboratorium / Jerzy Sawicki. Bydgoszcz, 2010 Spis treści Wykaz waŝniejszych oznaczeń 8 Przedmowa 1. POMIAR CIŚNIENIA ZA POMOCĄ MANOMETRÓW HYDROSTATYCZNYCH 11 1.1. Wprowadzenie 11 1.2.
Mechanika płynów : laboratorium / Jerzy Sawicki. Bydgoszcz, 2010 Spis treści Wykaz waŝniejszych oznaczeń 8 Przedmowa 1. POMIAR CIŚNIENIA ZA POMOCĄ MANOMETRÓW HYDROSTATYCZNYCH 11 1.1. Wprowadzenie 11 1.2.
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI ĆWICZENIE NR 4 OKREŚLENIE WSPÓŁCZYNNIKA STRAT LOEKALNYCH
 INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI Laboratorium z mechaniki płynów ĆWICZENIE NR 4 OKREŚLENIE WSPÓŁCZYNNIKA STRAT LOEKALNYCH . Cel ćwiczenia Celem ćwiczenia jest doświadczalne
INSTYTUT INŻYNIERII ŚRODOWISKA ZAKŁAD GEOINŻYNIERII I REKULTYWACJI Laboratorium z mechaniki płynów ĆWICZENIE NR 4 OKREŚLENIE WSPÓŁCZYNNIKA STRAT LOEKALNYCH . Cel ćwiczenia Celem ćwiczenia jest doświadczalne
LABORATORIUM MECHANIKI PŁYNÓW
 Ćwiczenie numer Pomiar współczynnika oporu liniowego 1. Wprowadzenie Stanowisko służy do analizy zjawiska liniowych strat energii podczas przepływu laminarnego i turbulentnego przez rurociąg mosiężny o
Ćwiczenie numer Pomiar współczynnika oporu liniowego 1. Wprowadzenie Stanowisko służy do analizy zjawiska liniowych strat energii podczas przepływu laminarnego i turbulentnego przez rurociąg mosiężny o
Jan A. Szantyr tel
 Katedra Energetyki i Aparatury Przemysłowej Zakład Mechaniki Płynów, Turbin Wodnych i Pomp J. Szantyr Wykład 1 Rozrywkowe wprowadzenie do Mechaniki Płynów Jan A. Szantyr jas@pg.gda.pl tel. 58-347-2507
Katedra Energetyki i Aparatury Przemysłowej Zakład Mechaniki Płynów, Turbin Wodnych i Pomp J. Szantyr Wykład 1 Rozrywkowe wprowadzenie do Mechaniki Płynów Jan A. Szantyr jas@pg.gda.pl tel. 58-347-2507
Ćwiczenie N 13 ROZKŁAD CIŚNIENIA WZDŁUś ZWĘśKI VENTURIEGO
 LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N ROZKŁAD CIŚNIENIA WZDŁUś ZWĘśKI VENTURIEGO . Cel ćwiczenia Doświadczalne wyznaczenie rozkładu ciśnienia piezometrycznego w zwęŝce Venturiego i porównanie go z
LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N ROZKŁAD CIŚNIENIA WZDŁUś ZWĘśKI VENTURIEGO . Cel ćwiczenia Doświadczalne wyznaczenie rozkładu ciśnienia piezometrycznego w zwęŝce Venturiego i porównanie go z
Moc mieszadła cyrkulacyjnego W warniku cukrowniczym * Streszczenie:
 František RIEGER**, Edward RZYSKI*** **Czeski Uniwersytet Techniczny w Pradze, Instytut Inynierii Procesowej, Praha, Republika Czeska ***Politechnika Łódzka, Katedra Aparatury Procesowej, Łód Moc mieszadła
František RIEGER**, Edward RZYSKI*** **Czeski Uniwersytet Techniczny w Pradze, Instytut Inynierii Procesowej, Praha, Republika Czeska ***Politechnika Łódzka, Katedra Aparatury Procesowej, Łód Moc mieszadła
WYBRANE ZAGADNIENIA UŻYTKOWANIA POMP WIROWYCH W PRZEMYŚLE SPOŻYWCZYM
 D o u ż y t k u w e w n ę t r z n e g o Katedra Inżynierii i Aparatury Przemysłu Spożywczego WYBRANE ZAGADNIENIA UŻYTKOWANIA POMP WIROWYCH W PRZEMYŚLE SPOŻYWCZYM Ćwiczenia laboratoryjne Opracowanie: Maciej
D o u ż y t k u w e w n ę t r z n e g o Katedra Inżynierii i Aparatury Przemysłu Spożywczego WYBRANE ZAGADNIENIA UŻYTKOWANIA POMP WIROWYCH W PRZEMYŚLE SPOŻYWCZYM Ćwiczenia laboratoryjne Opracowanie: Maciej
DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
 Mgr inż. Anna GRZYMKOWSKA Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa DOI: 10.17814/mechanik.2015.7.236 DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
Mgr inż. Anna GRZYMKOWSKA Politechnika Gdańska Wydział Oceanotechniki i Okrętownictwa DOI: 10.17814/mechanik.2015.7.236 DETEKCJA FAL UDERZENIOWYCH W UKŁADACH ŁOPATKOWYCH CZĘŚCI NISKOPRĘŻNYCH TURBIN PAROWYCH
Obwody sprzone magnetycznie.
 POITECHNIKA SKA WYDZIAŁ INYNIERII RODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZDZE ENERGETYCZNYCH ABORATORIUM EEKTRYCZNE Obwody sprzone magnetycznie. (E 5) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in.
POITECHNIKA SKA WYDZIAŁ INYNIERII RODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZDZE ENERGETYCZNYCH ABORATORIUM EEKTRYCZNE Obwody sprzone magnetycznie. (E 5) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in.
Zakład Podstaw Konstrukcji i Maszyn Przepływowych. Instytut Inżynierii Lotniczej, Procesowej i Maszyn Energetycznych. Politechnika Wrocławska
 Zakład Podstaw Konstrukcji i Maszyn Przepływowych Instytut Inżynierii Lotniczej, Procesowej i Maszyn Energetycznych Politechnika Wrocławska Wydział Mechaniczno-Energetyczny INSTRUKCJA 1.a. WYZNACZANIE
Zakład Podstaw Konstrukcji i Maszyn Przepływowych Instytut Inżynierii Lotniczej, Procesowej i Maszyn Energetycznych Politechnika Wrocławska Wydział Mechaniczno-Energetyczny INSTRUKCJA 1.a. WYZNACZANIE
Lekcja 6. Rodzaje sprężarek. Parametry siłowników
 Lekcja 6. Rodzaje sprężarek. Parametry siłowników Sprężarki wyporowe (tłokowe) Sprężarka, w której sprężanie odbywa sięcyklicznie w zarżniętej przestrzeni zwanej komorąsprężania. Na skutek działania napędu
Lekcja 6. Rodzaje sprężarek. Parametry siłowników Sprężarki wyporowe (tłokowe) Sprężarka, w której sprężanie odbywa sięcyklicznie w zarżniętej przestrzeni zwanej komorąsprężania. Na skutek działania napędu
wiczenie M-12 Pomiar strumienia masy i objtoci cz II
 POLITECHNIKA LSKA WYDZIAŁ INYNIERII RODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZDZE ENERGETYCZNYCH INSTRUKCJA do wicze laboratoryjnych z Metrologii wielkoci energetycznych wiczenie M-1 Pomiar strumienia
POLITECHNIKA LSKA WYDZIAŁ INYNIERII RODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZDZE ENERGETYCZNYCH INSTRUKCJA do wicze laboratoryjnych z Metrologii wielkoci energetycznych wiczenie M-1 Pomiar strumienia
RACJONALIZACJA ZUŻYCIA ENERGII DO NAPĘDU WENTYLATORÓW GŁÓWNEGO PRZEWIETRZANIA KOPALŃ WĘGLA KAMIENNEGO. Czerwiec 2018
 RACJONALIZACJA ZUŻYCIA ENERGII DO NAPĘDU WENTYLATORÓW GŁÓWNEGO PRZEWIETRZANIA KOPALŃ WĘGLA KAMIENNEGO Zbigniew Krawczyk Klaudiusz Pilarz Czerwiec 2018 I. WSTĘP II. III. IV. OCENA DOBORU WENTYLATORA GŁÓWNEGO
RACJONALIZACJA ZUŻYCIA ENERGII DO NAPĘDU WENTYLATORÓW GŁÓWNEGO PRZEWIETRZANIA KOPALŃ WĘGLA KAMIENNEGO Zbigniew Krawczyk Klaudiusz Pilarz Czerwiec 2018 I. WSTĘP II. III. IV. OCENA DOBORU WENTYLATORA GŁÓWNEGO
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 3 Metody ograniczenia strat mocy w układach hydraulicznych Opracowanie: Z. Kudźma, P. Osiński, U. Radziwanowska, J. Rutański, M. Stosiak
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 3 Metody ograniczenia strat mocy w układach hydraulicznych Opracowanie: Z. Kudźma, P. Osiński, U. Radziwanowska, J. Rutański, M. Stosiak
Rozprowadzenie i dobór kanałów wentylacyjnych (schemat instalacji)
") Rozprowadzenie i dobór kanałów wentylacyjnych (schemat instalacji) Projektowanie sieci przewodów wentylacyjnych 1. Obliczenie strumienia powietrza wentylującego (nawiewnego i wywiewnego). 2. Ustalenie
Rozprowadzenie i dobór kanałów wentylacyjnych (schemat instalacji) Projektowanie sieci przewodów wentylacyjnych 1. Obliczenie strumienia powietrza wentylującego (nawiewnego i wywiewnego). 2. Ustalenie
PL B1. CIEŚLICKI BOGUSŁAW, Gdańsk, PL KOWALSKI RADOSŁAW, Gdańsk, PL BUP 19/10
 PL 214337 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214337 (13) B1 (21) Numer zgłoszenia: 387407 (51) Int.Cl. A01K 63/04 (2006.01) C02F 1/74 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 214337 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 214337 (13) B1 (21) Numer zgłoszenia: 387407 (51) Int.Cl. A01K 63/04 (2006.01) C02F 1/74 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Parametry pracy pompy i zjawisko kawitacji
 Parametry pracy pompy i zjawisko kawitacji 1. Parametry pracy pompy 1.1. Wysokości podnoszenia 1.2. Wydajności 1.3. Moce 1.4. Sprawności 2. Kawitacja 2.1. Zjawisko kawitacji 2.2. Wpływ kawitacji na pracę
Parametry pracy pompy i zjawisko kawitacji 1. Parametry pracy pompy 1.1. Wysokości podnoszenia 1.2. Wydajności 1.3. Moce 1.4. Sprawności 2. Kawitacja 2.1. Zjawisko kawitacji 2.2. Wpływ kawitacji na pracę
Przyczyny zmiany struktury kryształów kolumnowych w odlewach wykonywanych pod wpływem wymuszonej konwekcji
 AMME 2002 11th Przyczyny zmiany struktury kryształów kolumnowych w odlewach wykonywanych pod wpływem wymuszonej konwekcji J. Gawroski, J. Szajnar Katedra Odlewnictwa, Politechnika lska ul. Towarowa 7,
AMME 2002 11th Przyczyny zmiany struktury kryształów kolumnowych w odlewach wykonywanych pod wpływem wymuszonej konwekcji J. Gawroski, J. Szajnar Katedra Odlewnictwa, Politechnika lska ul. Towarowa 7,
Odskok hydrauliczny i głbokoci sprzone Głboko krytyczna Ruch krytyczny i nadkrytyczny
 SPIS TRECI 1. Wstp... 11 2. Dane podstawowe... 12 2.1. Podstawowe jednostki fizyczne i zalenoci pomidzy nimi... 12 2.2. Niektóre stałe matematyczne... 12 2.3. Przedrostki jednostek stosowane w układzie
SPIS TRECI 1. Wstp... 11 2. Dane podstawowe... 12 2.1. Podstawowe jednostki fizyczne i zalenoci pomidzy nimi... 12 2.2. Niektóre stałe matematyczne... 12 2.3. Przedrostki jednostek stosowane w układzie
CYKL POWIETRZNY W BILANSIE PROMIENIOWANIA SŁONECZNEGO
 CYKL POWIETRZNY W BILANSIE PROMIENIOWANIA SŁONECZNEGO W cyklu powietrznym jest jeden z najniszych udziałów energii promieniowania słonecznego. Jest to zaledwie około 0,3% (około 4 W/m 2 ) strumienia energii
CYKL POWIETRZNY W BILANSIE PROMIENIOWANIA SŁONECZNEGO W cyklu powietrznym jest jeden z najniszych udziałów energii promieniowania słonecznego. Jest to zaledwie około 0,3% (około 4 W/m 2 ) strumienia energii
[ ] ρ m. Wykłady z Hydrauliki - dr inż. Paweł Zawadzki, KIWIS WYKŁAD WPROWADZENIE 1.1. Definicje wstępne
![[ ] ρ m. Wykłady z Hydrauliki - dr inż. Paweł Zawadzki, KIWIS WYKŁAD WPROWADZENIE 1.1. Definicje wstępne](/thumbs/93/111388021.jpg "[ ] ρ m. Wykłady z Hydrauliki - dr inż. Paweł Zawadzki, KIWIS WYKŁAD WPROWADZENIE 1.1. Definicje wstępne") WYKŁAD 1 1. WPROWADZENIE 1.1. Definicje wstępne Płyn - ciało o module sprężystości postaciowej równym zero; do płynów zaliczamy ciecze i gazy (brak sztywności) Ciecz - płyn o małym współczynniku ściśliwości,
WYKŁAD 1 1. WPROWADZENIE 1.1. Definicje wstępne Płyn - ciało o module sprężystości postaciowej równym zero; do płynów zaliczamy ciecze i gazy (brak sztywności) Ciecz - płyn o małym współczynniku ściśliwości,
STRATY ENERGII. (1) 1. Wprowadzenie.
 1. Wprowadzenie.") STRATY ENERGII. 1. Wprowadzenie. W czasie przepływu płynu rzeczywistego przez układy hydrauliczne lub pneumatyczne następuje strata energii płynu. Straty te dzielimy na liniowe i miejscowe. Straty liniowe
STRATY ENERGII. 1. Wprowadzenie. W czasie przepływu płynu rzeczywistego przez układy hydrauliczne lub pneumatyczne następuje strata energii płynu. Straty te dzielimy na liniowe i miejscowe. Straty liniowe
WYZNACZENIE WSPÓŁCZYNNIKA OPORU LINIOWEGO PRZEPŁYWU LAMINARNEGO
 LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N 7 WYZNACZENIE WSPÓŁCZYNNIKA OPORU LINIOWEGO PRZEPŁYWU LAMINARNEGO 1. Cel ćwiczenia Doświadczalne wyznaczenie zaleŝności współczynnika oporu linioweo przepływu
LABORATORIUM MECHANIKI PŁYNÓW Ćwiczenie N 7 WYZNACZENIE WSPÓŁCZYNNIKA OPORU LINIOWEGO PRZEPŁYWU LAMINARNEGO 1. Cel ćwiczenia Doświadczalne wyznaczenie zaleŝności współczynnika oporu linioweo przepływu
HYDRODYNAMIKA PRZEPŁYWÓW USTALONYCH PRZEZ KANAŁY PROSTE
 Przedmowa Uszczelnienia spełniają bardzo ważne funkcje w budowie oraz eksploatacji maszyn i urządzeń. Tradycyjnie chronią one środowisko przed wyciekiem substancji szkodliwych z maszyn oraz zabezpieczają
Przedmowa Uszczelnienia spełniają bardzo ważne funkcje w budowie oraz eksploatacji maszyn i urządzeń. Tradycyjnie chronią one środowisko przed wyciekiem substancji szkodliwych z maszyn oraz zabezpieczają
Prdnica prdu zmiennego.
 POLITECHNIK LSK YDZIŁ INYNIERII RODOISK I ENERGETYKI INSTYTT MSZYN I RZDZE ENERGETYCZNYCH LBORTORIM ELEKTRYCZNE Prdnica prdu zmiennego. (E 16) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in. łodzimierz
POLITECHNIK LSK YDZIŁ INYNIERII RODOISK I ENERGETYKI INSTYTT MSZYN I RZDZE ENERGETYCZNYCH LBORTORIM ELEKTRYCZNE Prdnica prdu zmiennego. (E 16) www.imiue.polsl.pl/~wwwzmiape Opracował: Dr in. łodzimierz
Cel i zakres pracy dyplomowej inżynierskiej. Nazwisko Imię kontakt Modelowanie oderwania strug w wirniku wentylatora promieniowego
 Cel i zakres pracy dyplomowej inżynierskiej przejściowej Modelowanie oderwania strug w wirniku wentylatora promieniowego Metody projektowania wentylatorów promieniowych Ireneusz Czajka iczajka@agh.edu.pl
Cel i zakres pracy dyplomowej inżynierskiej przejściowej Modelowanie oderwania strug w wirniku wentylatora promieniowego Metody projektowania wentylatorów promieniowych Ireneusz Czajka iczajka@agh.edu.pl
ciąg podciśnienie wywołane róŝnicą ciśnień hydrostatycznych zamkniętego słupa gazu oraz otaczającego powietrza atmosferycznego
 34 3.Przepływ spalin przez kocioł oraz odprowadzenie spalin do atmosfery ciąg podciśnienie wywołane róŝnicą ciśnień hydrostatycznych zamkniętego słupa gazu oraz otaczającego powietrza atmosferycznego T0
34 3.Przepływ spalin przez kocioł oraz odprowadzenie spalin do atmosfery ciąg podciśnienie wywołane róŝnicą ciśnień hydrostatycznych zamkniętego słupa gazu oraz otaczającego powietrza atmosferycznego T0
PL B1. POLITECHNIKA ŚLĄSKA, Gliwice, PL BUP 20/10
 PL 213989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213989 (13) B1 (21) Numer zgłoszenia: 387578 (51) Int.Cl. E03F 5/22 (2006.01) F04B 23/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 213989 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 213989 (13) B1 (21) Numer zgłoszenia: 387578 (51) Int.Cl. E03F 5/22 (2006.01) F04B 23/12 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
α k = σ max /σ nom (1)
") Badanie koncentracji naprężeń - doświadczalne wyznaczanie współczynnika kształtu oprac. dr inż. Ludomir J. Jankowski 1. Wstęp Występowaniu skokowych zmian kształtu obciążonego elementu, obecności otworów,
Badanie koncentracji naprężeń - doświadczalne wyznaczanie współczynnika kształtu oprac. dr inż. Ludomir J. Jankowski 1. Wstęp Występowaniu skokowych zmian kształtu obciążonego elementu, obecności otworów,
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 1 Charakterystyka zasilacza hydraulicznego Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
LABORATORIUM TERMODYNAMIKI I TECHNIKI CIEPLNEJ. Badanie charakterystyki wentylatorów połączenie równoległe i szeregowe. dr inż.
 LABORATORIUM TERMODYNAMIKI I TECHNIKI CIEPLNEJ Badanie charakterystyki wentylatorów połączenie równoległe i szeregowe. dr inż. Jerzy Wiejacha ZAKŁAD APARATURY PRZEMYSŁOWEJ POLITECHNIKA WARSZAWSKA WYDZIAŁ
LABORATORIUM TERMODYNAMIKI I TECHNIKI CIEPLNEJ Badanie charakterystyki wentylatorów połączenie równoległe i szeregowe. dr inż. Jerzy Wiejacha ZAKŁAD APARATURY PRZEMYSŁOWEJ POLITECHNIKA WARSZAWSKA WYDZIAŁ
Badania technologii napawania laserowego i plazmowego proszkami na osnowie kobaltu, przylgni grzybków zaworów ze stali X40CrSiMo10-2
 AMME 2003 12th Badania technologii laserowego i plazmowego proszkami na osnowie kobaltu, przylgni grzybków zaworów ze stali X40CrSiMo10-2 A. Klimpel, A. Lisiecki, D. Janicki Katedra Spawalnictwa, Politechnika
AMME 2003 12th Badania technologii laserowego i plazmowego proszkami na osnowie kobaltu, przylgni grzybków zaworów ze stali X40CrSiMo10-2 A. Klimpel, A. Lisiecki, D. Janicki Katedra Spawalnictwa, Politechnika
Podstawowe narzędzia do pomiaru prędkości przepływu metodami ciśnieniowymi
 Ć w i c z e n i e 5a Podstawowe narzędzia do pomiaru prędkości przepływu metodami ciśnieniowymi 1. Wprowadzenie Celem ćwiczenia jest zapoznanie się z przyrządami stosowanymi do pomiarów prędkości w przepływie
Ć w i c z e n i e 5a Podstawowe narzędzia do pomiaru prędkości przepływu metodami ciśnieniowymi 1. Wprowadzenie Celem ćwiczenia jest zapoznanie się z przyrządami stosowanymi do pomiarów prędkości w przepływie
stopie szaro ci piksela ( x, y)
") I. Wstp. Jednym z podstawowych zada analizy obrazu jest segmentacja. Jest to podział obrazu na obszary spełniajce pewne kryterium jednorodnoci. Jedn z najprostszych metod segmentacji obrazu jest progowanie.
I. Wstp. Jednym z podstawowych zada analizy obrazu jest segmentacja. Jest to podział obrazu na obszary spełniajce pewne kryterium jednorodnoci. Jedn z najprostszych metod segmentacji obrazu jest progowanie.
OKREŚLENIE MAKSYMALNEJ WYSOKOŚCI SSANIA POMPY,
 OKREŚLENIE MAKSYMALNEJ WYSOKOŚCI SSANIA POMPY, ZJAWISKO KAWITACJI. Kawitacja jest to proces tworzenia się pęcherzyków parowo-gazowych nasyconej cieczy, w skutek miejscowego spadku ciśnienia poniżej wartości
OKREŚLENIE MAKSYMALNEJ WYSOKOŚCI SSANIA POMPY, ZJAWISKO KAWITACJI. Kawitacja jest to proces tworzenia się pęcherzyków parowo-gazowych nasyconej cieczy, w skutek miejscowego spadku ciśnienia poniżej wartości
W Y B R A N E P R O B L E M Y I N Y N I E R S K I E PROJEKT SIŁOMIERZA Z ZASTOSOWANIEM TENSOMETRII OPOROWEJ
 W Y B R A N E P R O B L E M Y I NY N I E R S K I E Z E S Z Y T Y N A U K O W E I N S T Y T U T U A U T O M A T Y Z A C J I P R O C E S Ó W T E C H N O L O G I C Z N Y C H I Z I N T E G R O W A N Y C H
W Y B R A N E P R O B L E M Y I NY N I E R S K I E Z E S Z Y T Y N A U K O W E I N S T Y T U T U A U T O M A T Y Z A C J I P R O C E S Ó W T E C H N O L O G I C Z N Y C H I Z I N T E G R O W A N Y C H
Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI
 Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI I. WSTĘP II. SYSTEMY ODWADNIANIA KOPALŃ GŁĘBINOWYCH III. SYSTEMY ODWADNIANIA KOPALŃ ODKRYWKOWYCH IV. POMPY WIROWE IV.1. Podział pomp IV.1.1.
Pompy w górnictwie Grzegorz Pakuła, Marian Strączyński SPIS TREŚCI I. WSTĘP II. SYSTEMY ODWADNIANIA KOPALŃ GŁĘBINOWYCH III. SYSTEMY ODWADNIANIA KOPALŃ ODKRYWKOWYCH IV. POMPY WIROWE IV.1. Podział pomp IV.1.1.
Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie
 Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie BADANIE WENTYLATORÓW PRZEMYSŁOWYCH I ICH UKŁADÓW PRACY Prowadzący: mgr inż. Tomasz Siwek siwek@agh.edu.pl 1. Wprowadzenie teoretyczne 1.1.
Akademia Górniczo- Hutnicza Im. Stanisława Staszica w Krakowie BADANIE WENTYLATORÓW PRZEMYSŁOWYCH I ICH UKŁADÓW PRACY Prowadzący: mgr inż. Tomasz Siwek siwek@agh.edu.pl 1. Wprowadzenie teoretyczne 1.1.
PL B1 (13) B1 F04D 17/12 F04D 29/18 F04D 1/06. (5 7) 1. Pompa wirowa odśrodkowa wielostopniowa
 B1 F04D 17/12 F04D 29/18 F04D 1/06. (5 7) 1. Pompa wirowa odśrodkowa wielostopniowa") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 168077 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Num er zgłoszenia: 292014 (2 2) Data zgłoszenia: 10.10.1991 (51) IntCl6: F04D 1/06 F04D
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 168077 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Num er zgłoszenia: 292014 (2 2) Data zgłoszenia: 10.10.1991 (51) IntCl6: F04D 1/06 F04D
ZASADY NALICZANIA OPŁAT ZA WPROWADZANIE ZANIECZYSZCZE DO POWIETRZA
 ZASADY NALICZANIA OPŁAT ZA WPROWADZANIE ZANIECZYSZCZE DO POWIETRZA (przykłady z zastosowaniem jednostkowych stawek opłat obowizujcych w 2003 roku) Naliczanie opłat za rodki transportu Przykład 1 Zakład
ZASADY NALICZANIA OPŁAT ZA WPROWADZANIE ZANIECZYSZCZE DO POWIETRZA (przykłady z zastosowaniem jednostkowych stawek opłat obowizujcych w 2003 roku) Naliczanie opłat za rodki transportu Przykład 1 Zakład
LABORATORIUM MECHANIKI PŁYNÓW
 Ćwiczenie numer 3 Pomiar współczynnika oporu lokalnego 1 Wprowadzenie Stanowisko umożliwia wykonanie szeregu eksperymentów związanych z pomiarami oporów przepływu w różnych elementach rzeczywistych układów
Ćwiczenie numer 3 Pomiar współczynnika oporu lokalnego 1 Wprowadzenie Stanowisko umożliwia wykonanie szeregu eksperymentów związanych z pomiarami oporów przepływu w różnych elementach rzeczywistych układów
BADANIE SPRĘŻARKI TŁOKOWEJ.
 BADANIE SPRĘŻARKI TŁOKOWEJ. Definicja i podział sprężarek Sprężarkami ( lub kompresorami ) nazywamy maszyny przepływowe, służące do podwyższania ciśnienia gazu w celu zmagazynowania go w zbiorniku. Gaz
BADANIE SPRĘŻARKI TŁOKOWEJ. Definicja i podział sprężarek Sprężarkami ( lub kompresorami ) nazywamy maszyny przepływowe, służące do podwyższania ciśnienia gazu w celu zmagazynowania go w zbiorniku. Gaz
PROJEKT NR 2 Współpraca pompy z rurociągiem
 PROJEKT NR 2 Współpraca pompy z rurociągiem Z otwartego zbiornika wodnego o dużej pojemności pompowana jest woda chłodząca do górnego zbiornika ciśnieniowego przez rurociąg z rur stalowych przedstawiony
PROJEKT NR 2 Współpraca pompy z rurociągiem Z otwartego zbiornika wodnego o dużej pojemności pompowana jest woda chłodząca do górnego zbiornika ciśnieniowego przez rurociąg z rur stalowych przedstawiony
Pompy i układy pompowe
 Marek Skowroński Regulacja pompy i układu Pompy i układy pompowe Metody zmiany parametrów pracy układu Punkt pracy układu Regulacja dławieniowa Regulacja upustowa Straty mocy hydraulicznej w układzie Zmiana
Marek Skowroński Regulacja pompy i układu Pompy i układy pompowe Metody zmiany parametrów pracy układu Punkt pracy układu Regulacja dławieniowa Regulacja upustowa Straty mocy hydraulicznej w układzie Zmiana
Straty energii podczas przepływu wody przez rurociąg
 1. Wprowadzenie Ć w i c z e n i e 11 Straty energii podczas przepływu wody przez rurociąg Celem ćwiczenia jest praktyczne wyznaczenie współczynników strat liniowych i miejscowych podczas przepływu wody
1. Wprowadzenie Ć w i c z e n i e 11 Straty energii podczas przepływu wody przez rurociąg Celem ćwiczenia jest praktyczne wyznaczenie współczynników strat liniowych i miejscowych podczas przepływu wody
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Podręcznik eksploatacji pomp w górnictwie
 Podręcznik eksploatacji pomp w górnictwie Wbrew temu co sugeruje tytuł jest to podręcznik przeznaczony nie tylko dla specjalistów zajmujących się pompami w kopalniach. W książce wiele cennej wiedzy znajdą
Podręcznik eksploatacji pomp w górnictwie Wbrew temu co sugeruje tytuł jest to podręcznik przeznaczony nie tylko dla specjalistów zajmujących się pompami w kopalniach. W książce wiele cennej wiedzy znajdą