SYSTEMY ENERGETYKI ODNAWIALNEJ
|
|
|
- Szymon Olejniczak
- 6 lat temu
- Przeglądów:
Transkrypt
1 SYSTEMY ENERGETYKI ODNAWIALNEJ Wykład: Układy sterowania i regulacji w energetyce Prowadzący: dr inż. Marcin Michalski kontakt: energetyka.michalski@gmail.com energetyka.michalski Slajd 1
2 ZASADY NA ZAJĘCIACH 1. Obecność (UWAGA! NA WYKŁAD LOGUJEMY SIĘ : Nazwisko i Imię) 2. Test końcowy 3. Czat/mail/facebook 4. Strona - archiwum wykładów hasło: akademiav - biblioteka on-line

3 LITERATURA Praktyczny Poradnik Instalatora informacja:


4


5 UKŁADY NAPĘDU ELEKTRYCZNEGO Napęd elektryczny zespół połączonych ze sobą i oddziałujących na siebie wzajemnie elementów przetwarzających energię elektromechaniczną w procesie technologicznym. Rys.19. Uproszczony schemat elektrycznego układu napędowego Slajd 5
6 UKŁADY NAPĘDU ELEKTRYCZNEGO Elementy napędu elektrycznego: - układ zasilający przekształca energię elektryczną pobieraną z sieci i dostarcza ją do silnika np. prostownik sterowany, - silnik elektryczny (lub kilka silników) przekształca doprowadzoną energię elektryczną na energię mechaniczną, - urządzenie pędne przekazuje energię mechaniczną wytworzoną przez silnik do maszyny roboczej, może także zmieniać parametry przekazywanej energii mechanicznej, tj. moment, prędkość kątowa np. sprzęgło, przekładnia zębata, przekładnia pasowa, - urządzenia sterowania i automatyki stosowane napęd ma być sterowany automatycznie Napęd elektryczny zasila z reguły maszynę roboczą, która jest odbiornikiem energii mechanicznej wytwarzanej przez napęd. Slajd 6



7

8 Heron żyjący w I wieku n.e. wynalazca z Aleksandrii opisał i wykonał wiele urządzeń. Wśród nich znajduje się automat na monety. Po wrzuceniu monety otrzymywało się niewielką ilość wody do obmycia twarzy i rąk. Automat ten działał następująco: moneta spadała na niewielką tacę doczepioną do końca beleczki znajdującej się w równowadze. Pod ciężarem monety koniec belki opadał, a drugi wznosił się, otwierając zawór i umożliwiając wypływ wody. 8

9 Regulator prędkości obrotowej Watta (1784 r.) 9
10 Pierwszym automatem obróbkowym było dzieło Christophera Spencera ( ) z USA, który w 1873 roku rozbudował tokarkę rewolwerową w automatyczną obrabiarkę Hartford i w której krzywki sterowały dźwigniami przesuwającymi obrabiane przedmioty i zmieniały narzędzia. Automat Spencera wytwarzał w dużych ilościach śruby, nakrętki i koła zębate do maszyn do szycia. Ponadto Spencer założył wkrótce Hartford Machine Skrew Company, której automatyczne obrabiarki stały się przykładowymi dla tworzącego się przemysłu budowy maszyn i przyczyniły się do rozwoju ręcznie sterowanych obrabiarek. Dalsze wynalazki automatów doprowadzają do powstania w latach dwudziestych XX wieku nowej dyscypliny naukowej automatyki, obejmującej teorię konstruowania automatów i automatyzacji, tj. samodzielnego regulowania, sterowania i kontrolowania różnych procesów i czynności. Automatyzacja przemysłu rozwinęła się na szeroką skalę w Stanach Zjednoczonych po I wojnie światowej głównie w dziedzinach technologii chemicznej i przesyłania energii elektrycznej. W 1923 roku w USA rozpoczęła pracę pierwsza automatyczna linia produkcyjna. 10
11 Automatyka jest dziedziną wiedzy, która zajmuje się możliwościami wyeliminowania lub ograniczenia udziału człowieka w czynnościach związanych ze sterowaniem różnorodnymi procesami, głównie technologicznymi i przemysłowymi. Automatyka jest dziedziną nauki zajmująca się teorią i praktyczną realizacją urządzeń sterujących procesami, głównie technologicznymi i przemysłowymi. Automatyka zajmuje się analizą i modelowaniem matematycznym obiektów różnej natury (np. cieplnych, chemicznych, elektrycznych, mechanicznych, hydraulicznych, pneumatycznych). Stworzony model obiektu pozwala na zastosowanie teorii sterowania do stworzenia urządzenia zwanego regulatorem, (sterownikiem, kontrolerem) sterującego danym obiektem lub procesem tak, by ten zachowywał się w pożądany sposób. Na przestrzeni wielu lat w postępującym procesie automatyzacji w różnych dziedzinach techniki pojawiały się praktyczne rozwiązania układów regulujących samoczynnie (np. obroty maszyn czy ciśnienia w zbiornikach). Analizę zachowań tych układów traktowano jako część odpowiedniej dziedziny techniki (np. teorii maszyn czy pneumatyki), co sprawiało, że wiedza na temat regulacji była porozrzucana pośród różnych działów nauki. Automatyka organizuje cały ten dorobek, uogólniając go przy tym i upraszczając. 11
12 Regulator stanowi zespół środków technicznych, za pomocą których realizuje się sterowanie. Sygnał w automatyce wielkość fizyczna będąca funkcją czasu występująca w układzie sterowania służąca do opisu właściwości układu. Przykłady sygnałów zmiany w czasie ciśnienia, przepływu, temperatury, prędkości, napięcia, prądu itp. 12
13 Sterowanie może odbywać się w układzie otwartym lub zamkniętym: Sterowanie w układzie otwartym polega na takim nastawieniu wielkości wejściowej, aby znając charakterystykę obiektu i przewidując możliwość działania nań zakłóceń, otrzymać na wyjściu pożądaną wartość. Sterowanie w układzie zamkniętym różni się od sterowania w układzie otwartym tym, że regulator otrzymuje dodatkowo poprzez sprzężenie zwrotne informacje o stanie wielkości wyjściowej. Informacja ta podana w postaci np. napięcia do regulatora, jest używana do korygowania nastaw wielkości wejściowej obiektu. Sterowanie w układzie zamkniętym (regulacja automatyczna) polega na takim oddziaływaniu na obiekt sterowania aby jego sygnały wyjściowe osiągały wartość zadaną. 13
14 Układ automatyki (regulacji) zespół elementów biorących udział bezpośrednio w sterowaniu obiektem oraz elementów pomocniczych, który jest uporządkowany na zasadzie ich wzajemnej współpracy, tzn. zgodnie z kierunkiem przepływu sygnału. Sygnał może być opisany za pomocą funkcji zależnej od czasu. Ponieważ sygnał niesie informację o naturze badanych zjawisk lub systemów, w niektórych dziedzinach nauk jest on traktowany jak nośnik informacji. Sygnał oznacza zatem przepływ strumienia informacji. 14
15 Układ otwarty układ, w którym sygnał wejściowy nie zależy od aktualnej wartości sygnału wyjściowego, ponieważ nie występuje sprzężenie zwrotne, a wynika jedynie z wewnętrznego stanu obiektu. Przebieg sygnału następuje tylko w jednym kierunku, od wejścia do wyjścia. Układ otwarty, jest uproszczonym układem sterowania w stosunku do układu automatycznej regulacji. Ponieważ nie istnieje możliwość tłumienia nieznanych zakłóceń oraz osiągnięcie wartości zadanej nie może być zweryfikowane, układ otwarty stosowany jest w przypadku prostych obiektów, dla których znany jest dokładny model matematyczny. W przypadku znanej wartości zakłócenia (np. temperatury na zewnątrz budynku, w którym znajduje się kocioł centralnego ogrzewania) układ otwarty może być użyty do jego kompensacji. Układ zamknięty układ, w którym przebieg sygnału następuje w dwóch kierunkach. Od wejścia do wyjścia przebiega sygnał realizujący wzajemne oddziaływanie elementów, natomiast od wyjścia do wejścia przebiega sygnał sprzężenia zwrotnego. 15
16 Ogólny schemat blokowy układu regulacji automatycznej (układu zamkniętego). z(t) w(t) + e(t) u(t) y(t) y(t) Regulator Obiekt sterowania tor sprzężenia zwrotnego Sygnały występujące w układzie regulacji jednej zmiennej to: w(t) sygnał zadany (wejściowy), określa zadanie sterowania, y(t) u(t) e(t) z(t) sygnał wyjściowy, zwany także sygnałem regulowanym, sygnał sterujący (nastawiającym) sygnał uchybu regulacji (w układzie z idealnym regulatorem uchyb powinien przyjmować wartość 0) sygnał zakłócający Regulator w układzie regulacji może być urządzeniem analogowym lub cyfrowym. 16
17 Regulacja napięcia turbogeneratora prądu stałego przez zmianę dopływu pary Regulator odśrodkowy z 1 Zawór Ciśnienie Temperatura Generator = const R (Z 2 ) Turbina 17
18 Schemat blokowy układu regulacji w ujęciu przemysłowym z(t) Obiekt regulacji y(t) Element wykonawczy Nastawnik Siłownik Czujnik Przetwornik Element pomiarowy u(t) Regulator e(t) _ + w(t) y(t) - sygnał regulowany (wielkość regulowana), w(t) - sygnał zadany (wartość zadana) wielkości regulowanej, e(t) - sygnał błędu (uchybu) regulacji, u(t) - sygnał sterujący (sterowanie), z(t) - sygnał zakłócający (zakłócenie). 18
19 Schemat blokowy nowoczesnego układu regulacji w ujęciu przemysłowym z(t) Element wykonawczy Obiekt Element pomiarowy y(t) Obiekt sterowania C/A Komputer A/C Regulator (sterownik) Wejście operatora 19

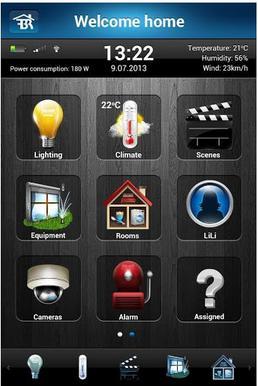
20 zarzadzanie-domem-przez-telefon.html


21
22
23 WIDEO


24 UKŁAD STEROWAINIA NA PRZYKŁADZIE POMPY CIEPŁA VITOCAL 160A
25
26

27
28
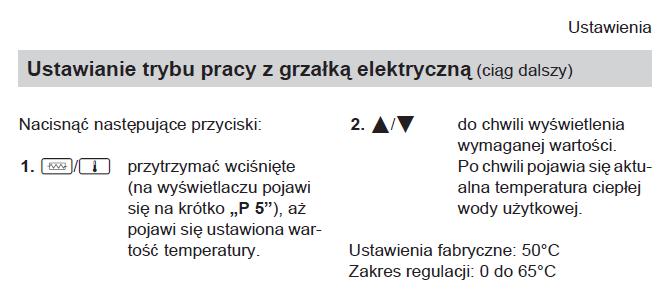
29
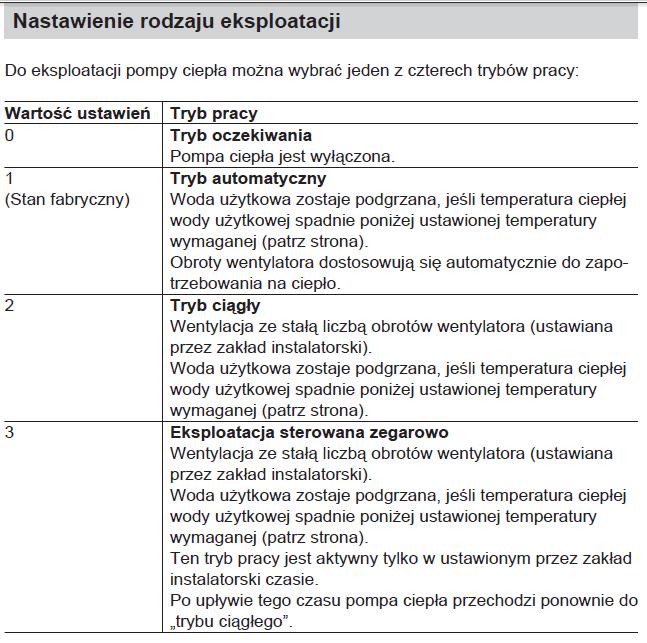
30
31 kolejny wykład 22 listopad: - Konserwacja obwodów i układów elektrycznych - powtórka wiadomości o systemach fotowoltaicznych i uzupełnienie wiedzy z kursu B.21
32 DZIĘKUJĘ ZA UWAGĘ Prowadzący: dr inż. Marcin Michalski energetyka.michalski Slajd 32
Automatyka i Regulacja Automatyczna SEIwE- sem.4
 Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i Regulacja Automatyczna SEIwE- sem.4 Wykład 30/24h ( Lab.15/12h ) dr inż. Jan Deskur tel. 061665-2735(PP), 061 8776135 (dom) Jan.Deskur@put.poznan.pl (www.put.poznan.pl\~jan.deskur) Zakład
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Wykład nr 1 Podstawowe pojęcia automatyki
 Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Wykład nr 1 Podstawowe pojęcia automatyki Podstawowe definicje i określenia wykorzystywane w automatyce Omówienie podstawowych elementów w układzie automatycznej regulacji Omówienie podstawowych działów
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA
 Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Instrukcja do ćwiczenia 6 REGULACJA TRÓJPOŁOŻENIOWA Cel ćwiczenia: dobór nastaw regulatora, analiza układu regulacji trójpołożeniowej, określenie jakości regulacji trójpołożeniowej w układzie bez zakłóceń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Elementy układu automatycznej regulacji (UAR)
") 1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
1 Elementy układu automatycznej regulacji (UAR) Wprowadzenie W naszej szkole, specjalizacją w klasie elektronicznej jest automatyka przemysłowa. Niniejszy artykuł ma na celu przedstawienie czytelnikom
Prowadzący: Prof. PWr Jan Syposz
 Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
Automatyzacja w inżynierii środowiska Prowadzący: Wykład 1 Prof. PWr Jan Syposz Zakres tematyczny wykładu Wprowadzenie do techniki regulacji i sterowania Regulatory Programowanie sterowników swobodnie
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny
 Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Instrukcja do ćwiczeń laboratoryjnych Napęd hydrauliczny Sterowanie układem hydraulicznym z proporcjonalnym zaworem przelewowym Opracowanie: Z. Kudźma, P. Osiński, M. Stosiak 1 Proporcjonalne elementy
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Dr hab. inż. Jan Duda. Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji
 Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
Automatyzacja i Robotyzacja Procesów Produkcyjnych Dr hab. inż. Jan Duda Wykład dla studentów kierunku Zarządzanie i Inżynieria Produkcji Podstawowe pojęcia Automatyka Nauka o metodach i układach sterowania
PL B1. Sposób i układ sterowania przemiennika częstotliwości z falownikiem prądu zasilającego silnik indukcyjny
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 199628 (13) B1 (21) Numer zgłoszenia: 367654 (51) Int.Cl. H02P 27/04 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.05.2004
 Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Zestaw 1 1. Rodzaje ruchu punktu materialnego i metody ich opisu. 2. Mikrokontrolery architektura, zastosowania. 3. Silniki krokowe budowa, zasada działania, sterowanie pracą. Zestaw 2 1. Na czym polega
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Sterowanie napędów maszyn i robotów dr inż. Jakub Możaryn Wykład 1 Instytut Automatyki i Robotyki Wydział Mechatroniki Politechnika Warszawska, 2014 Projekt współfinansowany przez Unię Europejską w ramach
Automatyka w inżynierii środowiska. Wykład 1
 Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH
 P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
P O L I T E C H N I K A Ł Ó D Z K A INSTYTUT ELEKTROENERGETYKI ZAKŁAD ELEKTROWNI LABORATORIUM POMIARÓW I AUTOMATYKI W ELEKTROWNIACH Badanie siłowników INSTRUKCJA DO ĆWICZENIA LABORATORYJNEGO ŁÓDŹ 2011
Ćwiczenie 1. Badanie aktuatora elektrohydraulicznego. Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium. Instrukcja laboratoryjna
 Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Sterowanie Napędów Maszyn i Robotów Przemysłowych - laboratorium Ćwiczenie 1 Badanie aktuatora elektrohydraulicznego Instrukcja laboratoryjna Opracował : mgr inż. Arkadiusz Winnicki Warszawa 2010 Badanie
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Instrukcja do ćwiczeń laboratoryjnych. Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing
 Instrukcja do ćwiczeń laboratoryjnych Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Wstęp teoretyczny Poprzednie ćwiczenia poświęcone były sterowaniom dławieniowym. Do realizacji
Instrukcja do ćwiczeń laboratoryjnych Sterowanie odbiornikiem hydraulicznym z rozdzielaczem typu Load-sensing Wstęp teoretyczny Poprzednie ćwiczenia poświęcone były sterowaniom dławieniowym. Do realizacji
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Mechatronika i inteligentne systemy produkcyjne. Aktory
 Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Mechatronika i inteligentne systemy produkcyjne Aktory 1 Definicja aktora Aktor (ang. actuator) -elektronicznie sterowany człon wykonawczy. Aktor jest łącznikiem między urządzeniem przetwarzającym informację
Modele i metody automatyki
 Modele i metody automatyki Dr inż. Wiesław Madej Wstęp Modele i metody automatyki 30 h wykład 15 h ćwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura T. Kaczorek Teoria sterowania
Modele i metody automatyki Dr inż. Wiesław Madej Wstęp Modele i metody automatyki 30 h wykład 15 h ćwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura T. Kaczorek Teoria sterowania
Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej.
 Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej. Paweł Paszkowski SUChiKl Semestr IX Rok akademicki 2010/2011 SPIS TREŚCI Regulacja temperatury
Temat: Systemy do precyzyjnej regulacji temperatury w obiektach chłodzonych o dużej i małej pojemności cieplnej. Paweł Paszkowski SUChiKl Semestr IX Rok akademicki 2010/2011 SPIS TREŚCI Regulacja temperatury
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE.
 1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
1 Temat /6/: DYNAMIKA UKŁADÓW HYDRAULICZNYCH. WIADOMOŚCI PODSTAWOWE. Celem ćwiczenia jest doświadczalne określenie wskaźników charakteryzujących właściwości dynamiczne hydraulicznych układów sterujących
Podstawy Automatyki. Wykład 12 - Układy przekaźnikowe. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
Wykład 12 - Układy przekaźnikowe Instytut Automatyki i Robotyki Warszawa, 2015 Projektowanie układów kombinacyjnych Układy kombinacyjne są realizowane: w technice stykowo - przekaźnikowej, z elementów
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
(12) OPIS PATENTOWY (19) PL (11)
 OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176342 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 308646 (22) Data zgłoszenia: 14.05.1995 (51) IntCl6: F01K 13/02 (54)Sposób
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176342 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 308646 (22) Data zgłoszenia: 14.05.1995 (51) IntCl6: F01K 13/02 (54)Sposób
Wprowadzenie. Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego.
 Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Napędy hydrauliczne Wprowadzenie Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
Laboratorium Maszyny CNC. Nr 3
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 3 Przekładnia elektroniczna Opracował Dr inż. Wojciech Ptaszyński Poznań, 18 kwietnia 016 1. Cel pracy Celem ćwiczenia
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyczne sterowanie i optymalizacja operacji jednostkowych produkcji żywności - przegląd wybranych metod
 Automatyczne sterowanie i optymalizacja operacji jednostkowych produkcji żywności - przegląd wybranych metod Dr hab. inż. Antoni Ryniecki, prof. nadzw. kwiecień 2008 1. Pojęcia podstawowe; cele i zadania
Automatyczne sterowanie i optymalizacja operacji jednostkowych produkcji żywności - przegląd wybranych metod Dr hab. inż. Antoni Ryniecki, prof. nadzw. kwiecień 2008 1. Pojęcia podstawowe; cele i zadania
AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L2 STEROWANIE INWERTEROWYM URZĄDZENIEM CHŁODNICZYM W TRYBIE P
 ĆWICZENIE LABORAORYJNE AUOMAYKA I SEROWANIE W CHŁODNICWIE, KLIMAYZACJI I OGRZEWNICWIE L2 SEROWANIE INWEREROWYM URZĄDZENIEM CHŁODNICZYM W RYBIE P Wersja: 2013-09-30-1- 2.1. Cel ćwiczenia Celem ćwiczenia
ĆWICZENIE LABORAORYJNE AUOMAYKA I SEROWANIE W CHŁODNICWIE, KLIMAYZACJI I OGRZEWNICWIE L2 SEROWANIE INWEREROWYM URZĄDZENIEM CHŁODNICZYM W RYBIE P Wersja: 2013-09-30-1- 2.1. Cel ćwiczenia Celem ćwiczenia
Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap
 Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Siłowniki Pneumatyczne, elektryczne i elektrohydrauliczne siłowniki do zaworów regulacyjnych i klap Siłowniki membranowe do 2800 cm² Siłowniki elektryczne do 12,5 kn Siłowniki elektrohydrauliczne tłokowe
Zajęcia laboratoryjne
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 10 Badania porównawcze układów sterowania i regulacji prędkością odbiornika hydraulicznego Opracowanie: H. Kuczwara, Z. Kudźma, P. Osiński,
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 10 Badania porównawcze układów sterowania i regulacji prędkością odbiornika hydraulicznego Opracowanie: H. Kuczwara, Z. Kudźma, P. Osiński,
PRZETWORNIKI POMIAROWE
 PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
PRZETWORNIKI POMIAROWE PRZETWORNIK POMIAROWY element systemu pomiarowego, który dokonuje fizycznego przetworzenia z określoną dokładnością i według określonego prawa mierzonej wielkości na inną wielkość
Wprowadzenie do technik regulacji automatycznej. prof nzw. dr hab. inż. Krzysztof Patan
 Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Wprowadzenie do technik regulacji automatycznej prof nzw. dr hab. inż. Krzysztof Patan Czym jest AUTOMATYKA? Automatyka to dziedzina nauki i techniki zajmująca się teorią i praktycznym zastosowaniem urządzeń
Zautomatyzowane systemy produkcyjne
 Zautomatyzowane systemy produkcyjne dr inŝ. Marcin Kiełczewski e-mail, www: marcin.kielczewski@put.poznan.pl www.put.poznan.pl/~marcin.kielczewski pok. 420 WE, tel.: 61 665 2848 1 Literatura Springer Handbook
Zautomatyzowane systemy produkcyjne dr inŝ. Marcin Kiełczewski e-mail, www: marcin.kielczewski@put.poznan.pl www.put.poznan.pl/~marcin.kielczewski pok. 420 WE, tel.: 61 665 2848 1 Literatura Springer Handbook
Wprowadzenie do techniki ćwiczenia energia, sprawność, praca
 Wprowadzenie do techniki ćwiczenia energia, sprawność, praca Energia zdolność do wywoływania zmian (działań) to funkcja stanu, której wartość zależy od parametrów stanu i jest zachowywana tak długo, jak
Wprowadzenie do techniki ćwiczenia energia, sprawność, praca Energia zdolność do wywoływania zmian (działań) to funkcja stanu, której wartość zależy od parametrów stanu i jest zachowywana tak długo, jak
dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 6!!!
 Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
Laboratorium nr2 Temat: Sterowanie pośrednie siłownikami jednostronnego i dwustronnego działania. 1. Wstęp Sterowanie pośrednie stosuje się do sterowania elementami wykonawczymi (siłownikami, silnikami)
1. Wstęp. dr inż. Piotr Pawełko / Przed przystąpieniem do realizacji ćwiczenia patrz punkt 4!!!
 Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
Laboratorium nr3 Temat: Sterowanie sekwencyjne półautomatyczne i automatyczne. 1. Wstęp Od maszyn technologicznych wymaga się zapewnienia ściśle określonych kolejności (sekwencji) działania. Dotyczy to
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
(13)B3 (12) OPIS PATENTOWY (19) PL (11)
B3 (12) OPIS PATENTOWY (19) PL (11)") RZECZPOSPOLITA POLSKA (13)B3 (12) OPIS PATENTOWY (19) PL (11) 176704 (21) Numer zgłoszenia: 308623 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 15.05.1995 (61) Patent dodatkowy do patentu:
RZECZPOSPOLITA POLSKA (13)B3 (12) OPIS PATENTOWY (19) PL (11) 176704 (21) Numer zgłoszenia: 308623 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 15.05.1995 (61) Patent dodatkowy do patentu:
Mechatronika i inteligentne systemy produkcyjne. Paweł Pełczyński ppelczynski@swspiz.pl
 Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Mechatronika i inteligentne systemy produkcyjne Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, cel i zastosowania mechatroniki Urządzenie mechatroniczne - przykłady
Wprowadzenie. - Napęd pneumatyczny. - Sterowanie pneumatyczne
 Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
Wprowadzenie Pneumatyka - dziedzina nauki i techniki zajmująca się prawami rządzącymi przepływem sprężonego powietrza; w powszechnym rozumieniu także technika napędu i sterowania pneumatycznego. Zastosowanie
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI
 PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
PODSTAWY AUTOMATYKI IV. URZĄDZENIA GRZEJNE W UKŁADACH AUTOMATYCZNEJ REGULACJI Ćwiczenie nr 4 BADANIE TERMOSTATYCZNYCH GŁOWIC GRZEJNIKOWYCH Rzeszów 2001 2 1. WPROWADZENIE Termostatyczne zawory grzejnikowe
BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-2 BUDOWA I TESTOWANIE UKŁADÓW PNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski, dr inż. Michał Krępski
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2016 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
UKŁAD AUTOMATYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU STAŁEGO KONFIGUROWANY GRAFICZNIE
 UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
UKŁAD AUOMAYCZNEJ REGULACJI SILNIKA SZEREGOWEGO PRĄDU SAŁEGO KONFIGUROWANY GRAFICZNIE Konrad Jopek (IV rok) Opiekun naukowy referatu: dr inż. omasz Drabek Streszczenie: W pracy przedstawiono układ regulacji
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Urządzenia nastawcze
 POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
POLITECHNIKA ŚLĄSKA WYDZIAŁ INŻYNIERII ŚRODOWISKA I ENERGETYKI INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Urządzenia nastawcze Laboratorium automatyki (A-V) Opracował: dr inż. Leszek Remiorz Sprawdził:
9.Tylko jedna odpowiedź jest poprawna. 10. Wybierz właściwą odpowiedź i zamaluj kratkę z odpowiadającą jej literą np., gdy wybrałeś odpowiedź A :
 6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
6.Czytaj uważnie wszystkie zadania. 7. Rozwiązania zaznaczaj na KARCIE ODPOWIEDZI długopisem lub piórem z czarnym tuszem/atramentem. 8. Do każdego zadania podane są cztery możliwe odpowiedzi: A, B, C,
1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki:
 Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Temat: Silniki prądu stałego i ich właściwości ruchowe. 1. W zależności od sposobu połączenia uzwojenia wzbudzającego rozróżniamy silniki: a) samowzbudne bocznikowe; szeregowe; szeregowo-bocznikowe b)
Automatyka chłodnicza
 Gdańsk, 04.12.2007r. Automatyka chłodnicza Politechnika Gdańska Wydział Mechaniczny Temat pt.: Układy automatyki nowoczesnych central klimatyzacyjnych z odzyskiem ciepła: budowa + działanie + przykłady
Gdańsk, 04.12.2007r. Automatyka chłodnicza Politechnika Gdańska Wydział Mechaniczny Temat pt.: Układy automatyki nowoczesnych central klimatyzacyjnych z odzyskiem ciepła: budowa + działanie + przykłady
Sterowanie pracą reaktora chemicznego
 Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
Wykaz ważniejszych oznaczeń Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13
 Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
Spis treści 3 Wykaz ważniejszych oznaczeń...9 Przedmowa... 12 1. Podstawowe informacje o napędzie z silnikami bezszczotkowymi... 13 1.1.. Zasada działania i klasyfikacja silników bezszczotkowych...14 1.2..
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i
 SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
SPIS TREŚCI PRZEDMOWA WYKAZ WAŻNIEJSZYCH OZNACZEŃ 1. PODSTAWOWE INFORMACJE O NAPĘDZIE Z SILNIKAMI BEZSZCZOTKOWYMI 1.1. Zasada działania i klasyfikacja silników bezszczotkowych 1.2. Moment elektromagnetyczny
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do egzaminu dyplomowego magisterskiego Kierunek: Mechatronika
 Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Lista zagadnień kierunkowych pomocniczych w przygotowaniu do Kierunek: Mechatronika 1. Materiały używane w budowie urządzeń precyzyjnych. 2. Rodzaje stali węglowych i stopowych, 3. Granica sprężystości
Układy sterowania: a) otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)
 otwarty, b) zamknięty w układzie zamkniętym, czyli w układzie z ujemnym sprzężeniem zwrotnym (układzie regulacji automatycznej)") Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
Istnieją dwa podstawowe sposoby sterowania: w układzie otwartym: układ składa się z elementu sterującego i obiektu sterowania; element sterujący nie otrzymuje żadnych informacji o sygnale wyjściowym y,
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji automatycznej Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Badanie wpływu parametrów korektora na własności dynamiczne układu regulacji Ćwiczenia Laboratoryjne Podstawy Automatyki i Automatyzacji mgr inż.
1. Logika połączeń energetycznych.
 1. Logika połączeń energetycznych. Zasilanie oczyszczalni sterowane jest przez sterownik S5 Siemens. Podczas normalnej pracy łączniki Q1 Q3 Q4 Q5 Q6 Q10 są włączone, a Q9 wyłączony. Taki stan daje zezwolenie
1. Logika połączeń energetycznych. Zasilanie oczyszczalni sterowane jest przez sterownik S5 Siemens. Podczas normalnej pracy łączniki Q1 Q3 Q4 Q5 Q6 Q10 są włączone, a Q9 wyłączony. Taki stan daje zezwolenie
Wydział Mechaniczny Katedra Techniki Cieplnej
 Wydział Mechaniczny Katedra Techniki Cieplnej Automatyka Chłodnicza i Klimatyzacyjna. Układy automatyki nowoczesnych central klimatyzacyjnych z odzyskiem i bez odzysku ciepła, budowa, działanie i przykłady
Wydział Mechaniczny Katedra Techniki Cieplnej Automatyka Chłodnicza i Klimatyzacyjna. Układy automatyki nowoczesnych central klimatyzacyjnych z odzyskiem i bez odzysku ciepła, budowa, działanie i przykłady
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Instrukcja obsługi SPEED CONTROL. Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy
 SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
SPEED CONTROL Electro-pneumatic Speed control system Elektropneumatyczny Regulator Wydajności Pompy Informacje ogólne Sterownik Warren Rupp SPEED CONTROL może być stosowany do sterowania wydajnością pomp
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Napęd elektryczny. Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie
 Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Napęd elektryczny Główną funkcją jest sterowane przetwarzanie energii elektrycznej na mechaniczną i odwrotnie Podstawowe elementy napędu: maszyna elektryczna, przekształtnik, czujniki, sterownik z oprogramowaniem,
Zawór stałej mocy LV 06 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C
 RL 95546/05.87 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C RL 95546/05.87 Zastąpiono 01.82 Klucz typowielkości Oznaczenia Zawór stałej mocy Wielkość nominalna Wielkość nominalna Wykonanie 1
RL 95546/05.87 Elementy sterowania dla typoszeregu 5 i typoszeregu E/C RL 95546/05.87 Zastąpiono 01.82 Klucz typowielkości Oznaczenia Zawór stałej mocy Wielkość nominalna Wielkość nominalna Wykonanie 1
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (19) PL (11) 188152 (21) Numer zgłoszenia: 327709 (22) Data zgłoszenia: 23.07.1998 (13) B1 (51) Int.Cl.7: F24D 19/10
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
Nazwa przedmiotu: HYDRAULIKA, PNEUMATYKA I SYSTEMY AUTOMATYZACJI PRODUKCJI Hydraulics, pneumatics and production automation systems Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp ZASADA DZIAŁANIA Jednym z flagowych produktów firmy Apator Control są zestawy systemów sterowania pompami typu ASQ. Jest to rozwiązanie autorskie kadry inżynierskiej,
systemy sterowania zestawami pomp ZASADA DZIAŁANIA Jednym z flagowych produktów firmy Apator Control są zestawy systemów sterowania pompami typu ASQ. Jest to rozwiązanie autorskie kadry inżynierskiej,
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Mikroprocesorowy regulator AMK
 Dokumentacja techniczno-rozruchowa dla układu automatyki sterującej centralami wentylacyjnymi ikroprocesorowy regulator AK Automatyka central wentylacyjnych. SPIS TREŚCI. WŁAŚCIWOŚCI UKŁADU.... 3 2. STEROWNIK
Dokumentacja techniczno-rozruchowa dla układu automatyki sterującej centralami wentylacyjnymi ikroprocesorowy regulator AK Automatyka central wentylacyjnych. SPIS TREŚCI. WŁAŚCIWOŚCI UKŁADU.... 3 2. STEROWNIK
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
PL B1. ZAWADA HENRYK, Siemianowice Śląskie, PL ZAWADA MARCIN, Siemianowice Śląskie, PL BUP 09/13
 PL 223028 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223028 (13) B1 (21) Numer zgłoszenia: 396751 (51) Int.Cl. F24J 2/04 (2006.01) F03B 13/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223028 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223028 (13) B1 (21) Numer zgłoszenia: 396751 (51) Int.Cl. F24J 2/04 (2006.01) F03B 13/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Zawory liniowe. Zawór zwrotny bliźniaczy sterowany. Zawór zwrotny bliźniaczy sterowany. Opis:
 Zawór zwrotny bliźniaczy sterowany Zawory zwrotne bliźniacze sterowane służą do blokowania odbiornika w obu kierunkach. Przepływ jest swobodny w jednym kierunku a w drugim jest kontrolowany ciśnieniem
Zawór zwrotny bliźniaczy sterowany Zawory zwrotne bliźniacze sterowane służą do blokowania odbiornika w obu kierunkach. Przepływ jest swobodny w jednym kierunku a w drugim jest kontrolowany ciśnieniem
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Dobór parametrów regulatora - symulacja komputerowa. Najprostszy układ automatycznej regulacji można przedstawić za pomocą
 Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Politechnika Świętokrzyska Wydział Mechatroniki i Budowy Maszyn Centrum Laserowych Technologii Metali PŚk i PAN Zakład Informatyki i Robotyki Przedmiot:Podstawy Automatyzacji - laboratorium, rok I, sem.
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych pływakowego regulatora poziomu
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych pływakowego regulatora poziomu
Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa. Instrukcja do zajęć laboratoryjnych
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych dwustawnego regulatora ciśnienia
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska Katedra Ciepłownictwa Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Badanie przebiegów regulacyjnych dwustawnego regulatora ciśnienia
BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-3 BUDOWA I TESTOWANIE UKŁADÓW ELEKTROPNEUMATYKI Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał
System pomiarowy kotła wodnego typu WR-10 pracującego w elektrociepłowni Ostrów Wlkp. informacje dodatkowe
 System pomiarowy kotła wodnego typu WR-10 pracującego w elektrociepłowni Ostrów Wlkp. informacje dodatkowe Zdjęcia kotła Tabliczka znamionowa kotła Kocioł WR-10 jest przeznaczony do podgrzewania wody
System pomiarowy kotła wodnego typu WR-10 pracującego w elektrociepłowni Ostrów Wlkp. informacje dodatkowe Zdjęcia kotła Tabliczka znamionowa kotła Kocioł WR-10 jest przeznaczony do podgrzewania wody
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Politechnika Gdańska
 Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Politechnika Gdańska Wydział Mechaniczny Katedra Energetyki i Aparatury Przemysłowej Automatyka chłodnicza i klimatyzacyjna TEMAT: Systemy sterowania i monitoringu obiektów chłodniczych na przykładzie
Dlaczego pompa powinna być "inteligentna"?
 Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
Dlaczego pompa powinna być "inteligentna"? W ciepłowniczych i ziębniczych układach pompowych przetłaczanie cieczy ma na celu transport ciepła, a nie, jak w pozostałych układach, transport masy. Dobrym
Regulatory wykonywane są z zaworami zamykanymi lub otwieranymi przy wzroście temperatury. Pozycja temperatury może być ukośna, pozioma lub pionowa.
 27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
27. Rodzaje regulatorów w instalacjach przemysłowych. I podział: Regulatory Regulatory są urządzeniami technicznymi, służącymi do wytwarzania na podstawie uchybu regulacji sygnału sterującego, to jest
WPŁYW PARAMETRÓW ZAKŁÓCAJĄCYCH NA PRACĘ SKRZYNI BIEGÓW WYPOSAŻONEJ W PRZEKŁADNIĘ CVT
 Bartosz RADZYMIŃSKI 1, Zbigniew PAWELSKI 2 1 Politechnika Łódzka, bartosz.radzyminski@p.lodz.pl 2 Politechnika Łódzka, zbigniew.pawelski@p.lodz.pl WPŁYW PARAMETRÓW ZAKŁÓCAJĄCYCH NA PRACĘ SKRZYNI BIEGÓW
Bartosz RADZYMIŃSKI 1, Zbigniew PAWELSKI 2 1 Politechnika Łódzka, bartosz.radzyminski@p.lodz.pl 2 Politechnika Łódzka, zbigniew.pawelski@p.lodz.pl WPŁYW PARAMETRÓW ZAKŁÓCAJĄCYCH NA PRACĘ SKRZYNI BIEGÓW
Ćw. 18: Pomiary wielkości nieelektrycznych II
 Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
Wydział: EAIiE Kierunek: Imię i nazwisko (e mail): Rok:. (../..) Grupa: Zespół: Data wykonania: Zaliczenie: Podpis prowadzącego: Uwagi: LABORATORIUM METROLOGII Ćw. 18: Pomiary wielkości nieelektrycznych
symbol graficzny Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego
 / / Symbole ogólne symbol graficzny opis Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego Zmienność albo nastawialność (pompy, sprężyny, itp.)
/ / Symbole ogólne symbol graficzny opis Kierunek przepływu i oznaczenie czynnika hydraulicznego Kierunek przepływu i oznaczenie czynnika pneumatycznego Zmienność albo nastawialność (pompy, sprężyny, itp.)
Nadzór Linii Produkcyjnych. Jacek Pszczółka AiR 187735
 Nadzór Linii Produkcyjnych Jacek Pszczółka AiR 187735 Linia Produkcyjna Linia produkcyjna albo linia montażowa zespół stanowisk roboczych (maszynowych, ręcznych lub mieszanych) ugrupowanych według kolejności
Nadzór Linii Produkcyjnych Jacek Pszczółka AiR 187735 Linia Produkcyjna Linia produkcyjna albo linia montażowa zespół stanowisk roboczych (maszynowych, ręcznych lub mieszanych) ugrupowanych według kolejności
Laboratorium. Hydrostatyczne Układy Napędowe
 Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Laboratorium Hydrostatyczne Układy Napędowe Instrukcja do ćwiczenia nr 5 Charakterystyka rozdzielacza hydraulicznego. Opracowanie: Z.Kudźma, P. Osiński J. Rutański, M. Stosiak Wiadomości wstępne Rozdzielacze
Rys. 1 Otwarty układ regulacji
 Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Automatyka zajmuje się sterowaniem, czyli celowym oddziaływaniem na obiekt, w taki sposób, aby uzyskać jego pożądane właściwości. Sterowanie często nazywa się regulacją. y zd wartość zadana u sygnał sterujący
Zajęcia laboratoryjne Napęd Hydrauliczny
 Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
Zajęcia laboratoryjne Napęd Hydrauliczny Instrukcja do ćwiczenia nr 11 Sterowanie objętościowe konwencjonalne Opracowanie: R. Cieślicki, Z. Kudźma, P. Osiński, J. Rutański, M. Stosiak Wrocław 2016 Spis
PNEUMATYCZNA TECHNIKA PROPORCJONALNA
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-7 PNEUMATYCZNA TECHNIKA PROPORCJONALNA Koncepcja i opracowanie: dr hab. inż. Witold Pawłowski dr inż. Michał Krępski
TEORIA MECHANIZMÓW I MANIPULATORÓW
 TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371
TEORIA MECHANIZMÓW I MANIPULATORÓW TEORIA MECHANIZMÓW I MANIPULATORÓW Dr inż. Artur Handke Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów Wydział Mechaniczny ul. Łukasiewicza 7/9, 50-371