Podstawy Konstrukcji Urządzeń Precyzyjnych
|
|
|
- Małgorzata Karczewska
- 8 lat temu
- Przeglądów:
Transkrypt
1 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 2 Sprzęgła Opracował: dr inż. Wiesław Mościcki Instytut Mikromechaniki i Fotoniki Zakład Konstrukcji Urządzeń Precyzyjnych
2 1. Wprowadzenie 2. Przekładnie zębate walcowe proste 3. Korekcja uzębienia i zazębienia 4. Przekładnie zębate śrubowe, ślimakowe i planetarne
3 Przekładnie - wprowadzenie Przekładnie - to mechanizmy zamieniające ruch obrotowy o zadanej prędkości kątowej na ruch obrotowy o prędkości innej lub takiej samej, zarówno co do wartości jak i co do kierunku. Niekiedy przekładniami nazywane są mechanizmy zamieniające ruch obrotowy na prostoliniowy (rzadziej odwrotnie). W każdej przekładni można wyróżnić: - człon czynny, czyli napędzający oraz - człon bierny, czyli ten który jest napędzany.
4 Przekładnie - wprowadzenie Jednym z podstawowych parametrów przekładni jest jej przełożenie. W przekładni, w której występuje tylko ruch obrotowy jest to iloraz prędkości kątowej c członu czynnego do prędkości b członu biernego według zależności: i c b W przekładniach zębatych to przełożenie nazywane jest przełożeniem kinematycznym. Jeśli człon bierny wykonuje ruch liniowy - przełożenie jest definiowane jako iloraz prędkości kątowej c członu czynnego do prędkości liniowej v b członu biernego zgodnie z relacją: i c v b W tym przypadku przełożenie jest wielkością mianowaną (1/m).
5 Przekładnie - wprowadzenie Przełożenie rozpatrywane w czasie odpowiadającym jednemu lub kilku obrotom członu czynnego, bez wnikania czy prędkości członów są stałe czy zmienne, nazywamy przełożeniem średnim i oznaczamy - i. Jeśli ruch analizowany jest w bardzo krótkim czasie, czyli w czasie t 0, mówi się o przełożeniu chwilowym - i c. W przekładniach zębatych rozróżnia się dodatkowo przełożenie geometryczne u które jest definiowane jako iloraz liczby zębów koła i liczby zębów zębnika (mniejsze z kół).
6 Klasyfikacja przekładni Przekładnie mechaniczne Przekładnie zębate Przekładnie cięgnowe Przekładnie cierne Przekładnie falowe Mechanizmy śrubowe Z osiami nieruchomymi Walcowe Stożkowe Cierne Gwintowe Ślizgowe Toczne Z osiami ruchomymi - planetarne Ślimakowe Zębate Bezgwintowe
7 Klasyfikacja przekładni W przekładniach zębatych w przenoszeniu ruchu pośredniczą kształtowe występy (zęby) umieszczone na obwodzie lub obrzeżu elementu i stanowiące wieniec koła zębatego lub zębatki (listwy zębatej).

8 Klasyfikacja przekładni W przekładniach cięgnowych wiotkie cięgno gładkie lub kształtowe współpracuje z kołem pasowym odpowiednio dobranym do kształtu cięgna. Ruch może więc być przenoszony ciernie, kształtowo lub z wykorzystaniem obu cech cięgien. Cięgna gładkie mogą być utwierdzone lub nieutwierdzone.
9 Klasyfikacja przekładni F n D 1 F t D 2 W przekładniach ciernych ruch przekazywany jest za pomocą sił tarcia powstających wskutek docisku współpracujących ze sobą elementów przekładni.
10 Klasyfikacja przekładni W przekładni falowej, tzw. generator fali 1 wymusza odkształcenie innego członu przekładni - elementu podatnego 2, by ten przez współpracę z członem 3 umożliwiał przeniesienie ruchu

11 Klasyfikacja przekładni Mechanizmy śrubowe zamieniają ruch obrotowy na liniowy, inaczej więc niż pozostałe przekładnie w których elementy wykonują ruch obrotowy.
.")
12 Przekładnie wprowadzenie Każda przekładnia składa się co najmniej z dwóch kół. Jest to wtedy przekładnia jednostopniowa (pojedyncza). Przy większej liczbie kół mamy do czynienia z przekładnią wielostopniową (złożoną). D7 ( )
13 Przekładnie wprowadzenie Zależnie od wzajemnego usytuowania osi kół przekładnie jednostopniowe mogą być: równoległe, kątowe i o osiach wichrowatych.

14 Przekładnie wprowadzenie Jeśli położenie osi podczas pracy przekładni jest niezmienne mamy do czynienia z przekładnią o stałych osiach, zaś w przypadku przeciwnym - z przekładnią o zmiennym położeniu osi.
15 Przekładnie wprowadzenie Przekładnia obiegowa (planetarna) jest szczególnym przypadkiem przekładni o zmiennym położeniu osi.
16 Przekładnie wprowadzenie W zależności od wartości przełożenia przekładnie dzieli się na: - reduktory, tj. przekładnie zwalniające, gdy przełożenie i 1, - multiplikatory, tj. przekładnie przyspieszające, gdy przełożenie i < 1. Przekładnia o stałym przełożeniu - przełożenie pozostaje niezmienne podczas pracy przekładni i nie może być zmienione. Przekładnia o zmiennym przełożeniu przełożenie zmienia się (cykloidalne) lub może być regulowane.
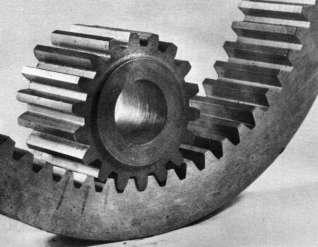
17 Przekładnie zębate
18 Przekładnie zębate - klasyfikacja Klasyfikacja przekładni mechanicznych może być całkowicie przeniesiona na przekładnie zębate.

19 Przekładnie zębate równoległe

20 Przekładnie zębate kątowe
21 Przekładnie zębate o osiach wichrowatych

22 Przekładnie zębate proste


23 Przekładnie zębate śrubowe
24 Przekładnie zębate walcowe

25 Przekładnie zębate stożkowe

26 Przekładnie zębate zębnik koło zębate Koło czynne, koło bierne

27 Przekładnie zębate Ślimak Człon czynny Koło ślimakowe Ślimacznica Człon bierny


28 Przekładnie zębate frezowanie obwiedniowe Frezowanie zębów prostych Frezowanie zębów śrubowych
29 Kryterium stałości przełożenia w przekładni zębatej

30 Przekładnie zębate Kryterium stałości przełożenia 2 1 Przełożenie średnie jednostopniowej walcowej przekładni zębatej równe ilorazowi liczby zębów koła biernego z 2 do liczby zębów koła czynnego z 1 ma stałą wartość.
31 Przekładnie zębate Kryterium stałości przełożenia 2 1 i z z 2 1 d d t2 t1 Jeśli przekładnia zębata ma stałe przełożenie kinematyczne ( 1 / 2 ) równe przełożeniu średniemu, to obrót jej kół, wynikający ze współpracy zębów, jest identyczny jak ruch dwóch, współśrodkowych z tymi kołami zębatymi, okręgów (walców), które toczą się po sobie bez poślizgu i mają takie średnice, że realizują stałe przełożenie chwilowe i identyczne jak przełożenie przekładni zębatej.
32 Przekładnie zębate Kryterium stałości przełożenia 2 1 i z z 2 1 d d t2 t1 Okręgi (walce) te nazywane są okręgami tocznymi (walcami tocznymi) i mają one średnice równe odpowiednio: d t1 średnica okręgu tocznego koła czynnego d t2 średnica okręgu tocznego koła biernego
33 Przekładnie zębate Kryterium stałości przełożenia 1, 2 cierna przekładnia wzorcowa 1, 2 zębata przekładnia badana
34 Przekładnie zębate Kryterium stałości przełożenia Niestałość przełożenia oznacza, że koło bierne obraca się ze zmienną prędkością, mimo że prędkość kątowa koła czynnego jest stała. Czy istnieje - a jeśli tak to jaki warunek zachowania stałego przełożenia w przekładni zębatej? Jaki zarys boków zębów umożliwia zachowanie stałego przełożenia w przekładni? 2 constans 1 = constans
35 Kryterium stałości przełożenia v 1 1 O 1 B Prędkość v 1 punktu B koła czynnego
36 Kryterium stałości przełożenia v 2 2 O 2 B Prędkość v 2 punktu B koła biernego
37 Kryterium stałości przełożenia Ciągłość współpracy zębów wystąpi tylko wtedy, jeśli rzuty prędkości v 1 i v 2 na wspólną normalną n będą sobie równe. v 1 cos 1 v2 cos 2 vn
38 Kryterium stałości przełożenia i 1 2 v1 O B 1 O2B v 2 i v v 1 2 O2B O B 1 v 1 cos 1 v2 cos 2 v v 1 2 cos cos 2 1 i O2B O B 1 cos cos 2 1
39 Kryterium stałości przełożenia Z O 2 BE wynika, że: O2B cos 2 O2E zaś z O 1 BF wynika zależność: O1B cos 1 O1F
40 Kryterium stałości przełożenia Po podstawieniu do wzoru: i O2B cos O B cos otrzymamy zależność na przełożenie: i O2E O F 1
41 Kryterium stałości przełożenia Z podobieństwa O 2 ED oraz O 1 FD mamy: O E O F 2 1 O2D O D 1 a po podstawieniu do poprzedniego wzoru otrzymamy: i 2 O2E O F 1 1 O2D O D 1
42 Kryterium stałości przełożenia Jeśli przełożenie kinematyczne ma być stałe to można je określić również wykorzystując fakt, że okręgi toczne toczą się po sobie bez poślizgu, a prędkości obwodowe w punkcie C są sobie równe: O1C 2 O2C 1 i' 1 2 O2C O C 1

43 Kryterium stałości przełożenia Przełożenie przekładni określone jest zatem dwoma zależnościami: i O2D O D 1 i' O2C O C 1 Równość obu przełożeń wystąpi tylko wtedy, gdy punkt D pokryje się z punktem C.

44 Kryterium stałości przełożenia Jeśli w każdym punkcie przyporu (styku zębów podczas współpracy) wspólna normalna do zarysów przetnie linię środków obu kół w punkcie C styczności okręgów tocznych tych kół, to przełożenie takiej przekładni będzie stałe i równe ilorazowi promieni tocznych d 2 /d 1.

45 Kryterium stałości przełożenia Jest to geometryczny n warunek stałości przełożenia przekładni zębatej. t Jest on możliwy do spełnienia wtedy, gdy: linia przyporu, tj. miejsce geometryczne punktów styczności, ma kształt linii prostej ponadto linia ta przechodzi przez punkt C. Tylko wtedy wspólna normalna do zarysów zawsze będzie przechodzić przez punkt C, gdyż pokrywa się z linią przyporu n.
46 Kryterium stałości przełożenia Geometryczny warunek stałości przełożenia spełniają zęby, które mają zarys ewolwentowy i to nawet wtedy, gdy rozstawienie osi współpracujących kół jest nieco inne niż nominalne. Przy nominalnej odległości osi kół warunek ten spełniają też zęby o zarysie cykloidalnym.
47 Kryterium stałości przełożenia Prędkość poślizgu W przekładniach, w których punkty D i C pokrywają się prędkość poślizgu w punkcie styku jest równa: v t BC 1 2
48 Kryterium stałości przełożenia Prędkość ta zmienia swą wartość a także zwrot. Prędkość poślizgu ma: - największą wartość na wzębieniu (odcinek BC jest wtedy najdłuższy), - równą zeru przy przejściu punktu B przez linię środków (punkt B pokrywa się z punktem C). Tu także zmienia swój zwrot i znowu zwiększa swą wartość w kierunku wyzębienia.
49 Tworzenie zarysu ewolwentowego

50 Tworzenie zarysu ewolwentowego narzędzie Metoda kształtowa polega na wykonaniu uzębienia narzędziem (frez kształtowy, tarcza szlifierska), które ma kształt wrębu międzyzębnego. Jest to metoda podziałowa, tzn. po wykonaniu każdego wrębu koło wykonuje obrót o kąt odpowiadający podziałce.
51 Tworzenie zarysu ewolwentowego narzędzie Metoda kształtowa jest bardzo wydajna tylko wtedy, gdy jednocześnie wykonywane są wszystkie zęby koła (przeciąganie, wykrawanie, odlewanie, kucie matrycowe, prasowanie). Zarys narzędzia jest krzywoliniowy, trudny do dokładnego wykonania. Zarys narzędzia ma inny kształt dla każdej liczby zębów koła.

52 Istota tworzenia ewolwenty Odwijanie cięgna z bębna o średnicy d b ewolwenta cięgno

53 Istota tworzenia ewolwenty Obtaczanie bez poślizgu prostej po nieruchomym okręgu ewolwenta okrąg zasadniczy
54 Istota tworzenia ewolwenty Obtaczanie bez poślizgu prostej n po nieruchomym okręgu o średnicy d b
55 Istota tworzenia ewolwenty Ewolwenta jest obwiednią kolejnych położeń prostej s. Jeżeli w tych kolejnych położeniach z prostą s będzie się pokrywać krawędź narzędzia, to wykona ono ewolwentowy zarys zęba.
 po nieruchomym okręgu zasadniczym może być zastąpione przez toczenie bez poślizgu tzw.")
56 Istota tworzenia ewolwenty Toczenie bez poślizgu prostej po okręgu linia przyporu (n) = linia toczna (t) okrąg zasadniczy = okrąg toczny Obtaczanie prostej (n) po nieruchomym okręgu zasadniczym może być zastąpione przez toczenie bez poślizgu tzw. linii tocznej t po obracającym się okręgu obróbczo-tocznym.
57 Tworzenie zarysu ewolwentowego Linia toczna (t) przemieszcza się w kierunku v, zaś koło zębate obraca się w kierunku. n = 0 Linia toczna (t) i linia (n) pokrywają się. Okrąg zasadniczy (d b ) i okrąg obróbczo-toczny (d ot ) też się pokrywają.
58 Tworzenie zarysu ewolwentowego n = 0 Razem z linią (t) przesuwają się, rozmieszczone na niej w jednakowych odstępach - p b, proste s prostopadłe do prostej t (n). Kąt n nachylenia prostej s względem prostej (t) jest równy zero, n = 0. Proste s to krawędzie tnące narzędzia a (n) to linia przyporu.
59 Tworzenie zarysu ewolwentowego Trapezowy zarys zębów zębatki, n > 0 n > 0 Proste s, mogą być nachylone pod dowolnym kątem n do kierunku ruchu v, czyli także do linii tocznej (t). Proste s są jednak dalej prostopadłe do linii przyporu (n). Linia przyporu (n) tworzy z linią toczną (t) kąt równy n. Z8 (10.04)
60 Tworzenie zarysu ewolwentowego Trapezowy zarys zębów zębatki, n > 0 Okręgi zasadniczy i obróbczo-toczny różnią się średnicami: (d b ) < (d ot ) n > 0 Kąt nachylenia krawędzi s względem prostopadłej do kierunku ruchu v, to kąt zarysu narzędzia n.
61 Tworzenie zarysu ewolwentowego Podczas wykonywania zarysu zębów koła, w następujących po sobie chwilach, kolejne punkty krawędzi s narzędzia znajdą się na prostej n. n > 0 Ewolwentowy zarys zęba jest więc tworzony przez wszystkie punkty prostoliniowej krawędzi tnącej s narzędzia.
62 Tworzenie zarysu ewolwentowego n > 0 Linia przyporu (n) jest to miejsce geometryczne punktów styczności krawędzi narzędzia i ewolwenty zęba. Kąt n jaki tworzy linia przyporu (n) z linią toczną (t) nazywamy obróbczo-tocznym kątem przyporu.
63 Tworzenie zarysu ewolwentowego n > 0 Odległość między sąsiednimi jednoimiennymi krawędziami s mierzona wzdłuż linii przyporu (n) to podziałka przyporu narzędzia - p b. Ta sama odległość mierzona wzdłuż linii tocznej (t) to podziałka obróbczo-toczna narzędzia - p ot.
64 Tworzenie zarysu ewolwentowego A 2 A 3 = B 2 B 3 podziałka zasadnicza = podziałka przyporu = p b

65 Tworzenie zarysu ewolwentowego Metoda obwiedniowa polega na wzajemnie skorelowanym przemieszczaniu narzędzia i koła w taki sposób, że w efekcie, jako obwiednia kolejnych położeń krawędzi tnących narzędzia, powstaje ewolwentowy zarys zębów.

66 Tworzenie zarysu ewolwentowego Zarys krawędzi tnących narzędzia-zębatki tworzących ewolwentowy kształt zębów koła jest linią prostą. W tym przypadku koła o jednakowym module uzębienia wykonywane są jednym narzędziem, niezależnie od liczby zębów koła (jeden zarys odniesienia).
67 Normalny zarys odniesienia Z7 (01.04)
68 Normalny zarys odniesienia Normalny zarys odniesienia - jest to zarys zębów koła o nieskończonej liczbie zębów (tj. zębatki) otrzymany w płaszczyźnie prostopadłej do linii zęba. Parametry normalnego zarysu odniesienia definiują zarys narzędzia np. w kształcie trapezowej zębatki - do obwiedniowej obróbki uzębienia kół. Zęby narzędzia (np. freza ślimakowego do obróbki kół zębatych w przekroju normalnym do linii śrubowej) są negatywem normalnego zarysu odniesienia.
69 Cechy zarysu odniesienia uzębień drobnomodułowych Zarys odniesienia uzębień drobnomodułowych spełnia następujące wymagania: a) umożliwia wykonanie zębników o małej liczbie zębów, co pozwala na stosowanie dużych modułów i tolerancji; b) umożliwia nie tylko znaczne zsuwanie osi kół, do czego niezbędny jest duży luz obwodowy i odpowiednio duży promieniowy, ale także ich rozsuwanie; c) umożliwia wykonanie zazębienia o dużej dokładności kinematycznej; d) zapewnia dużą trwałość narzędzi przez zaokrąglenie punktów przecięcia krawędzi oraz stosowanie możliwie szerokich wierzchołków zębów tych narzędzi; e) umożliwia łączną obróbkę boków i wierzchołków zęba (obróbka narzędziem o zarysie zamkniętym) z jednoczesnym zapewnieniem znacznego luzu obwodowego.

70 Obróbka uzębienia maszynowego i drobnomodułowego otoczka koła maszynowego narzędzie-zębatka otoczka koła drobnomodułowego
71 Zarys odniesienia dla modułów m 1 mm wg PN-92/M Przeznaczony do obróbki uzębienia narzędziem o zarysie otwartym.

72 Zarys odniesienia dla modułów m < 1 mm wg BS 978/68 a) bez konstrukcyjnego luzu b) z konstrukcyjnym obwodowego luzem obwodowym Przeznaczony do obróbki uzębienia narzędziem o zarysie zamkniętym.
73 Podstawowe parametry geometryczne koła zębatego
74 Parametry geometryczne koła zębatego ząb, wrąb, głowa, stopa, bok, wierzchołek, grubość zęba, szerokość wrębu,
75 Parametry geometryczne koła zębatego ząb, wrąb, głowa, stopa, bok, wierzchołek, grubość zęba, szerokość wrębu,
76 Parametry geometryczne koła zębatego ząb, wrąb, głowa, stopa, bok, wierzchołek, grubość zęba, szerokość wrębu,
77 Parametry geometryczne koła zębatego ząb, wrąb, głowa, stopa, bok, wierzchołek, grubość zęba, szerokość wrębu,
78 Parametry geometryczne koła zębatego - moduł uzębienia - m, m p - liczba zębów z, - zarys odniesienia (określa kształt narzędzia). CE = p podziałka obwodowa koła zębatego
79 Wartości modułów nominalnych według PN-78/M Zalecane wartości modułów nominalnych m [mm] 0,1 0,125 0,16 0,2 0,25 0,28 0,3 0,4 0,45 0,5 0,55 0,6 0,65 0,7 0, ,0 1,25 1,5 2 2,5 3 Wszystkie wielkości geometryczne dotyczące kół zębatych są wielokrotnością modułu. Gdy moduł m < 1 mm - koła drobnomodułowe, gdy moduł m 1mm koła maszynowe.
 Powyżej tego okręgu znajduje się głowa zęba, zaś poniżej stopa zęba.")
80 Podstawowe parametry geometryczne Okręgi koła zębatego Okrąg podziałowy okrąg koła zębatego na którym odkładana jest podziałka koła - p. (podziałka obwodowa) Powyżej tego okręgu znajduje się głowa zęba, zaś poniżej stopa zęba. - wysokość głowy zęba h a : y m h a - wysokość stopy zęba h f : um y (u) współczynnik wysokości głowy (stopy) zęba h f Średnica okręgu podziałowego: d m z
81 Podstawowe parametry geometryczne Okręgi koła zębatego Średnica okręgu zasadniczego: Okrąg zasadniczy średnica tego okręgu wpływa na kształt ewolwenty zarysu zębów. Jest to bowiem ten okrąg z którego odwijana jest ewolwenta lub po którym toczy się bez poślizgu prosta, a leżący na niej punkt kreśli linię krzywą zwaną ewolwentą (zasada obróbki obwiedniowej). przy czym kąt o - nominalny kąt zarysu jest parametrem tzw. zarysu odniesienia. d b dcos o
82 Podstawowe parametry geometryczne Okręgi koła zębatego Okrąg wierzchołków jest okręgiem zewnętrznym koła zębatego. Średnica okręgu wierzchołków (głów): d d 2h a a Dla koła niekorygowanego: d a m z 2y y współczynnik wysokości głowy zęba
83 Podstawowe parametry geometryczne Okręgi koła zębatego Okrąg podstaw (stóp) jest okręgiem dna wrębów koła zębatego. Średnica okręgu podstaw (stóp): d d 2 f h f Dla koła niekorygowanego: d f m z 2u u współczynnik wysokości stopy zęba
84 Podstawowe parametry geometryczne Okręgi koła zębatego Współpraca pary kół zębatych o stałym przełożeniu jest równoważna toczeniu się po sobie bez poślizgu dwóch teoretycznych okręgów. Są to okręgi toczne tych kół zębatych. Gdy koła nie są korygowane okręgi toczne pokrywają się z okręgami podziałowymi.

85 Podstawowe parametry geometryczne Kąt zarysu zęba - r Kąt zarysu - r w dowolnym punkcie ewolwenty zęba to kąt między styczną do zarysu w tym punkcie a prostą poprowadzoną do środka okręgu zasadniczego. Wartość kąta zarysu zmienia się od zera na okręgu zasadniczym do maksymalnej na okręgu wierzchołków.
 to podziałowy kąt")
86 Podstawowe parametry geometryczne Podziałowy kąt zarysu Kąt zarysu o w punkcie ewolwenty leżącym na okręgu podziałowym (punkt C) to podziałowy kąt zarysu.
87 Podstawowe parametry geometryczne Luz obwodowy w zazębieniu Grubość zęba i szerokość wrębu można wyznaczyć na dowolnym okręgu koła zębatego. Jeśli szerokość wrębu na okręgu podziałowym jest większa niż grubość zęba koła współpracującego (na jego okręgu podziałowym), to w przekładni wystąpi luz obwodowy.
88 Podstawowe parametry geometryczne Nominalna odległość osi a 0 Jeśli koła zębate nie są korygowane, to okręgi toczne pokrywają się z okręgami podziałowymi. Rozstawienie osi - równe sumie promieni okręgów podziałowych współpracujących kół zwane nominalną odległością osi a o opisuje zależność: a o 0,5m z 1 z 2 gdzie: m moduł uzębienia, z 1,2 liczba zębów koła czynnego (1) i biernego (2)
89 Współpraca zębów w przekładni D8 ( )

90 Współpraca zębów w przekładni Okrąg wierzchołków U Okrąg podziałowy C Okrąg zasadniczy W Zazębienie dwóch kół zębatych
91 Współpraca zębów w przekładni UW - odcinek przyporu, 0 - kąt przyporu, C - biegun zazębienia, (t-t) linia toczna, (n-n) linia przyporu, h głębokość zazębienia.
92 Współpraca zębów w przekładni UW - odcinek przyporu, 0 - kąt przyporu, C - biegun zazębienia, h głębokość zazębienia.
93 Wskaźnik zazębienia - UW p b Wskaźnik zazębienia (dawniej - liczba przyporu)
94 Współpraca zębów w przekładni CE podziałka obwodowa, BF podziałka przyporu, AD podziałka zasadnicza
95 Współpraca zębów w przekładni BF AD CE p p p b p b p b p cos p m p b m cos
96 Współpraca zębów w przekładni Aby zapewnić ciągłość współpracy zębów wartość wskaźnika zazębienia powinna być większa od jedności, > 1 UW p b W praktyce przyjmuje się, że liczba przyporu nie powinna być mniejsza niż 1,2 1,4.
97 Współpraca zębów w przekładni UW UC CW UC UE CE CW FW FC
98 Współpraca zębów w przekładni 1 2 cos 0 [ z 2 1 sin 2 0 4z 1 y 4y 2 z z sin ] z2 sin 0 4z2y 4y 1 2 0
99 Współpraca zębów w przekładni Wartość wskaźnika zazębienia nie zależy od modułu uzębienia m. Wartość wskaźnika zazębienia zależy od: liczby zębów z 1, z 2, współczynnika wysokości głowy y, kąta przyporu 0.
100 Współpraca zębów w przekładni Zwiększenie liczby zębów z 1 wydłuża odcinek przyporu, UW 1 > UW
101 Współpraca zębów w przekładni Zwiększenie liczby zębów z 2 wydłuża odcinek przyporu, U 1 W > UW
102 Współpraca zębów w przekładni Zwiększenie wartości współczynnika wysokości zęba y 1 > y powiększa średnice wierzchołków obu kół, a to oznacza, że wydłuża odcinek przyporu, U 1 W 1 > UW
103 Współpraca zębów w przekładni Zwiększenie wartości kąta przyporu powoduje skrócenie odcinka przyporu, U 2 W 2 < U 1 W 1.
104 Współpraca zębów w przekładni Zwiększenie wartości kąta przyporu może nastąpić wskutek: a) rozsunięcia osi kół, b) przez zastosowanie narzędzia o nominalnym kącie zarysu 2 > 1 ( 0 )
105 Współpraca zębów w przekładni UW h sin 2ym sin UW pb 2ym m cos sin Maksymalna wartość wskaźnika zazębienia wystąpi podczas współpracy dwóch kół o liczbach zębów dążących do nieskończoności.
106 Współpraca zębów w przekładni 4y sin 2 Dla parametrów zgodnych z zarysem odniesienia, czyli: y = 1 oraz = 20 0, a ponadto dla zębów prostych, maksymalna wartość wskaźnika zazębienia równa jest max = 1,98.
107 Luz w przekładni zębatej W przekładni zębatej występuje luz promieniowy oraz luz obwodowy. Luz promieniowy wynika z różnicy między wysokością stopy oraz głowy współpracujących zębów. L h h h h f1 a2 f2 a1 m u y Luz promieniowy w przekładni musi istnieć zawsze, nawet wtedy, gdy luz obwodowy został całkowicie skasowany. L 0
108 Luz obwodowy w przekładni zębatej Jeśli uzębienie kół wykonano narzędziem o zarysie zamkniętym luz obwodowy w zazębieniu wynika z zastosowanego zarysu odniesienia. Możliwe jest wtedy otrzymanie trzech wartości luzu: bardzo duży luz (0,1 m), gdy oba koła wykonano zarysem z konstrukcyjnym luzem obwodowym, zazębienie bezluzowe, gdy oba koła wykonano zarysem bez konstrukcyjnego luzu obwodowego, luz pośredni (0,05 m), gdy jedno koło wykonano zarysem odniesienia bez luzu a drugie z luzem.
109 Graniczna liczba zębów

110 Wymiary narzędzia zębatki r rzeczywista linia wierzchołkowa narzędzia m miarodajna linia wierzchołkowa narzędzia

111 Graniczne położenie narzędzia zębatki z z g z < z g m miarodajna linia wierzchołkowa narzędzia, g graniczne położenie miarodajnej linii m względem środka koła
112 Graniczna liczba zębów Jeżeli miarodajna linia wierzchołkowa m pokrywa się z prostą g, nie wystąpi podcięcie zębów. Miarodajna linia wierzchołkowa jest wtedy w położeniu granicznym. Najmniejsza liczba zębów przy którejwystąpi taki przypadek nazywa się graniczną liczbą zębów z g.
113 Promień (0,5d = OC) okręgu podziałowego, który ma graniczną liczbę zębów jest równy: OC 1 2 m Graniczna liczba zębów z g Z OFC: OC zaś z CHF: CF CF sin CH sin OC CH y m 2 sin sin 2
114 Graniczna liczba zębów Z rysunku wynika, że: CH y m więc: CH y m OC 2 sin sin 2 Po porównaniu prawych stron odpowiednich równań otrzymamy: y współczynnik wysokości głowy zęba, - nominalny kąt zarysu narzędzia 1 2 y m m z g 2 sin
115 Graniczna liczba zębów z g 2y 2 sin y współczynnik wysokości głowy zęba, - nominalny kąt zarysu narzędzia
116 Graniczna liczba zębów Jeśli liczba zębów z obrabianego koła jest równa granicznej z g lub jest większa od niej, czyli z z g, to miarodajna linia wierzchołkowa narzędzia - m na pewno nie znajdzie się bliżej środka koła niż linia g, wyznaczająca położenie graniczne. Nie będzie zatem zachodziło podcinanie zębów. Graniczna liczba zębów - z g jest to więc najmniejsza liczba zębów przy której w kole zębatym nie wystąpi podcięcie zarysów u podstawy zęba. Dla y = 1 i = 20 0 graniczna liczba zębów z g = 17.
117 Korekcja uzębienia

118 Podcinanie zębów = 0 Położenie narzędzia, gdy liczba zębów koła z < z g, Gdy liczba zębów koła jest mniejsza niż liczba graniczna, czyli z < z g, - wystąpi podcinanie zębów u podstawy.
119 Podcinanie zębów Podcinanie zębów występuje dlatego, że miarodajna linia wierzchołkowa m narzędzia znajduje się zbyt blisko środka koła.
120 Korekcja technologiczna uzębienia Żeby uniknąć podcinania zębów bez zmiany średnicy podziałowej koła należy spowodować, aby linia wierzchołkowa narzędzia m znalazła się w położeniu granicznym g. Nie zmieniając parametrów zarysu odniesienia, a więc zachowując wartości nominalnego kąta zarysu - 0 i współczynnika wysokości głowy zęba - y można tego dokonać dwoma sposobami.
121 Likwidacja podcięcia zębów Pierwszy sposób polega na zwiększeniu liczby zębów koła tak, aby przy pozostawieniu tej samej średnicy podziałowej, liczba zębów była równa lub większa niż graniczna - z g. Wtedy bowiem nie wystąpi już podcięcie zębów. Takie rozwiązanie wymaga jednak zmniejszenia modułu uzębienia, co oznacza konieczność wymiany narzędzia. Może też być nie do zaakceptowania ze względów wytrzymałościowych.
122 Korekcja technologiczna uzębienia Drugi sposób to zastosowanie tzw. korekcji technologicznej uzębienia. Polega ona na odsunięciu narzędzia-zębatki od środka koła do położenia w którym linia miarodajna m narzędzia znajdzie się w położeniu granicznym g.
123 Korekcja technologiczna uzębienia Przed korekcją Po korekcji Położenie narzędzia zębatki względem osi obrotu otoczki
124 Korekcja technologiczna uzębienia 1 2 mz CH 2 sin 0 CH y x m Wartość współczynnika przesunięcia zarysu x, wyznaczamy ze wzoru: x y z g z g z
125 Korekcja technologiczna uzębienia X 8 = 0,5294 X 10 = 0,4118 X 12 = 0,2941 x y z g z g z
126 Korekcja technologiczna uzębienia Wymiary koła zębatego po przeprowadzeniu korekcji uzębienia oblicza się z następujących zależności: średnica wierzchołków (głów): d a m(z 2y 2x) średnica podstaw (stóp): d f m(z 2u 2x) średnica podziałowa: d m z średnica zasadnicza: d b m z cos y = 1, u = 1,4, = 20 0 dla modułu m < 1 mm
127 Zaostrzenie wierzchołków zębów Każde odsunięcie narzędzia od środka koła powoduje zmniejszanie grubości zęba przy wierzchołku. Przy małej liczbie zębów koła wymagane odsunięcie narzędzia może być tak duże, że spowoduje przecięcie ewolwent obu stron zęba poniżej okręgu wierzchołków. Przecięcie ewolwent zarysów boków zębów oznacza: - zmniejszenie wysokości zęba, - zaostrzenie wierzchołka.
128 Minimalna liczba zębów z min Dlatego istnieje minimalna liczba zębów - z min koła jaką można wykonać bez podcięcia zębów i bez obniżenia ich wysokości. Minimalna liczba zębów jest równa: z min = 8 - dla zarysu odniesienia bez luzu konstrukcyjnego współczynnik przesunięcia zarysu x max = 0,5294. z min = 10 - dla zarysu odniesienia z luzem konstrukcyjnym współczynnik przesunięcia zarysu x max = 0,4118.
129 Korekcja zazębienia typu P-0 Z9 (12.04)
130 Korekcja zazębienia typu P-0 Koło o liczbie zębów z 1 < z g ma współpracować z kołem o liczbie zębów z 2 z g. Czy możliwe jest, aby rozstawienie ich osi tych kół było równe rozstawieniu nominalnemu - a o? a o 0,5m z 1 z 2 - konstruktorzy są przyzwyczajeni do stosowania rozstawienia nominalnego (zerowego), - powiększenie odległości osi powoduje zmniejszenie wartości wskaźnika zazębienia.
131 Korekcja zazębienia typu P-0 Zadanie można rozwiązać przez zastosowanie korekcji, która nazywa się korekcją P-O. Zębnik, o liczbie zębów z 1 < z g, koryguje się aż do zlikwidowania podcięcia zębów, odsuwając narzędzie od osi obrotu otoczki o odcinek X = xm. Jednocześnie jednak korekcji podlega też koło współpracujące przez dosunięcie narzędzia podczas obróbki dokładnie o taką samą wartość, X = xm. Odległość osi kół pozostanie niezmieniona i równa a 0. Korekcja P-0 jest korekcją technologiczną.
132 Warunek stosowania korekcji P-0 y z g x m f m z g z 1 y z 2 z g z g z z 2z 1 2 g z 1 liczba zębów mniejszego koła, z 1 < z g z 2 liczba zębów większego go koła
133 Wymiary przekładni po korekcji P-0 Wymiary zębnika (z 1 < z g ) po korekcji oblicza się z następujących zależności: średnica wierzchołków (głów): da1 m(z1 2y 2x) średnica podstaw (stóp): df1 m(z1 2u 2x) średnica podziałowa: d m 1 z 1 średnica zasadnicza: d m z b1 1 cos y = 1, u = 1,4, = 20 0 dla modułu m < 1 mm
134 Wymiary przekładni po korekcji P-0 Wymiary koła zębatego (z 2 > z g ) po korekcji oblicza się z następujących zależności: średnica wierzchołków: d m(z a2 2 2y 2x) średnica podstaw (stóp): d m(z f2 2 2u 2x) średnica podziałowa: średnica zasadnicza: odległość osi: d m z 2 2 d m z b2 2 a o 0,5m z 1 cos z 2
135 Skutki korekcji P-0 W wyniku korekcji P-O zmianie ulegają: - wymiary kół zębatych oraz grubość zębów, - okręgi podziałowy i zasadniczy nie zmieniają swoich wymiarów, - odcinek przyporu ma pełną długość (między okręgami wierzchołkowymi). Jest on jednak przesunięty względem linii środków (w kierunku wzębiania w przekładni przyspieszającej i w kierunku wyzębiania w przekładni redukcyjnej), - ze względu na to, że zachowana zostaje zerowa odległość osi, nie ulega zmianie kąt przyporu i jest równy 0 = 20 0.
136 Korekcja technologiczna typu P
137 Korekcja technologiczna typu P Jeżeli w przekładni nie jest spełniony warunek stosowalności korekcji P-O należy: skorygować jedno lub - jeśli jest taka potrzeba - oba koła tak, aby nie wystąpiło podcięcie zębów, dobrać powiększone rozstawienie osi kół zapewniające poprawną współpracę zębów. Realizacja takiej procedury nazywa się korekcją technologiczną typu P.
138 Korekcja technologiczna typu P Warunki stosowalności korekcji a) oba koła mają liczbę zębów mniejszą od granicznej z z g oraz 1 2 g b) tylko jedno z kół ma liczbę zębów mniejszą niż graniczna z z g oraz Suma liczb zębów (z 1 +z 2 ) jest: w przypadku (a) zawsze mniejsza od 2z g, w przypadku (b) dowolna z z z z 1 2 g z z z g
139 Korekcja technologiczna typu P Algorytm obliczeń dla obu przypadków, gdy jedno z kół ma liczbę zębów mniejszą od granicznej: z z g z z g z z a) 1 i b) 1 g i z z 2 2 g Aby nie dopuścić do wystąpienia podcięcia należy skorygować jedno koło (przypadek (b)) lub - jeśli jest taka potrzeba - oba koła (przypadek (a)); Dobrać takie powiększone rozstawienie osi kół, które zapewni poprawną współpracę zębów z odpowiednim luzem obwodowym (małym lub dużym).
140 Korekcja technologiczna typu P Przekładnia z dużym luzem obwodowym Odległość osi zapewniającą duży luz obwodowy oblicza się z następujących zależności: a p a m x x Jeśli korekcji wymaga tylko koło z 1 (przypadek (b)), wtedy współczynnik przesunięcia zarysu x 2 ma wartość równą zeru: x 2 0 a p pozorna odległość osi
141 Korekcja technologiczna typu P Przekładnia z dużym luzem obwodowym Wymiary kół zębatych przekładni po korekcji oblicza się z następujących zależności: - średnica wierzchołków: - średnica podstaw (stóp): - średnica podziałowa: d 1, 2 m(z 1, 2 2y 2x1, a 2 d 1, 2 m(z 1, 2 2u 2x1, d f 2 1, 2 m z1, 2 ) ) - średnica zasadnicza: d 1,b 2 m z1, b 2 cos
142 Korekcja technologiczna typu P Przekładnia z małym luzem obwodowym Odległość osi zapewniającą mały luz obwodowy, co jest częstszym przypadkiem pracy przekładni, oblicza się z zależności: a r a 1 0 B a r rzeczywista odległość osi (poszukiwana) B wskaźnik rzeczywistej odległości osi Poszukiwana odległość a r jest oczywiście mniejsza od odległości pozornej ale większa od nominalnej (zerowej). a o a r a p
143 Korekcja technologiczna typu P Przekładnia z małym luzem obwodowym Do wyznaczenia wartości wskaźnika B konieczne jest wyznaczenie wskaźnika pozornej odległości osi A. Pozorną odległość osi a p, można obliczyć z zależności: a p a 1 0 A A wskaźnik pozornej odległości osi Z porównania tego wzoru z podanym wcześniej: a p a 0 m x1 x2 otrzymamy: 2x x A z 1 1 z 2 2
144 Korekcja technologiczna typu P Przekładnia z małym luzem obwodowym Między wskaźnikami: A pozornej i B rzeczywistej odległości osi istnieją następujące zależności: A B A A B 1 7B B wskaźnik rzeczywistej odległości osi, A wskaźnik pozornej odległości osi
145 Korekcja technologiczna typu P Przekładnia z małym luzem obwodowym Wymiary przekładni korygowanej z małym luzem obwodowym oblicza się z następujących zależności: - średnica wierzchołków: gdzie k współczynnik obniżenia głowy zęba: d, 2 m z1, 2 y 2x1, k a z z A B 0, Pozostałe średnice przekładni korygowanej z małym luzem oblicza się ze znanych zależności: - średnica podstaw (stóp): d k f1, 2 m z1, 2 2 u 2x1, 2 - średnica podziałowa: d 1, 2 m z1, 2
146 Korekcja konstrukcyjna typu P
147 Korekcja konstrukcyjna typu P Należy ją przeprowadzić wtedy, gdy w przekładni zadana jest odległość osi a a 0, najczęściej a > a 0. Algorytm: a) wyznaczyć sumę współczynników przesunięcia zarysu (x 1 +x 2 ), niezbędną do zapewnienia poprawnej współpracy zębów, b) rozdzielić wyznaczoną sumę współczynników (x 1 +x 2 ) na poszczególne koła, c) obliczyć średnice kół.
148 Korekcja konstrukcyjna typu P 1. Przekładnia z dużym luzem obwodowym: Przyjmujemy, że narzucona odległość osi a jest równa odległości pozornej a p, co oznacza, że: a p współczynnik A jest równy: A a p a 0 a 0 ale a 1 0 A A 2 x z ap a0 z1 z2 ( x x2) m x z Suma współczynników (x 1 + x 2 ) opisana jest zależnością: 1 a 0 nominalna odległość osi, z 1,2 liczba zębów kół A 2 2
149 Korekcja konstrukcyjna typu P 2. Przekładnia z małym luzem obwodowym: Przyjmujemy, że narzucona odległość osi a jest równa odległości a r co oznacza, że: a r współczynnik B jest równy: a 1 0 B Ze związków między wskaźnikami A i B wyznaczamy parametr A i ze znanej już zależności sumę (x 1 +x 2 ): z 1 z2 ( x1 x2) A 2 B a r a a 0 0
150 Korekcja konstrukcyjna typu P Podział sumy współczynników (x 1 + x 2 ) W przypadku, gdy jedno lub oba koła mają liczby zębów mniejsze niż liczba graniczna (z 1 < z g, lub z 1,2 < z g ) należy przy rozdziale sumy (x 1 +x 2 ) zapewnić w pierwszej kolejności likwidację podcięcia zębów u podstawy. Taki przypadek nazywamy korekcją konstrukcyjno-technologiczną.
151 Korekcja konstrukcyjna typu P Podział sumy współczynników (x 1 + x 2 ) W ogólnym przypadku, gdy gdy z 1,2 > z g można postąpić w dwojaki sposób: - całą wartość sumy (x 1 + x 2 ) przydzielić mniejszemu kołu, (nie wolno dopuścić do zaostrzenia wierzchołków zębów), - podzielić sumę (x 1 + x 2 ) według zależności: x x 1 2 z z 2 1
152 Korekcja konstrukcyjna typu P Skutki korekcji - zmiana wymiarów kół (średnice d a, d f, d t ), - zmiana kształtu zębów: zwiększa się wysokość głowy a zmniejsza wysokość stopy, rośnie grubość zębów na okręgu podziałowym a maleje na okręgu wierzchołków, - zwiększenie odległości osi a oraz wartości kąta przyporu 0, - zmniejszenie długości odcinka przyporu a zatem i wskaźnika zazębienia.
153 Rozkład sił w przekładni walcowej o zębach prostych
154 Rozkład sił w przekładni walcowej o zębach prostych bez uwzględnienia tarcia = 1 P n1 2M d 1 b1 P n2 2M d 2 b2 P n1 P n2 P n P n d 1 2M1 cos 0 d 2 2M2 cos 0 Całkowita siła międzyzębna jest stała w dowolnym punkcie przyporu, a więc i w biegunie zazębienia C.
155 Rozkład sił w przekładni walcowej o zębach prostych bez uwzględnienia tarcia = 1 Po przekształceniu otrzymamy zależność, prawdziwą w tym przypadku, na całym odcinku przyporu: i d d 2 1 M M 2 1
156 Rozkład sił w przekładni walcowej o zębach prostych bez uwzględnienia tarcia = 1 Siła obwodowa P o : r P P o1 o n P n P o2 cos 0 P 0 o Siła promieniowa P r : P P r1 P P r2 P sin r P 0 2M d 2 2 tg 0
157 Rozkład sił w przekładni walcowej o zębach prostych - z uwzględnieniem tarcia Założenie: = 1. P m siła międzyzębna na wzębieniu P m siła międzyzębna na wyzębieniu W biegunie zazębienia C (tarcie nierozwinięte) siła P m skierowana jest wzdłuż linii przyporu.
158 Rozkład sił w przekładni walcowej o zębach prostych - z uwzględnieniem tarcia = 1 Przy stałej wartości momentu czynnego M 1 wartość siły międzyzębnej P m zwiększa się wzdłuż odcinka przyporu wraz ze zbliżaniem się do bieguna zazębienia C. Identycznie zmienia się moment chwilowy M 2 na kole biernym.
159 Przełożenie momentowe w przekładni walcowej o zębach prostych = 1 Przełożenie momentowe, rozumiane jako iloraz M 2 /M 1, jest równe: i m M M 2 1 O2D O D 1 Przekładnia o stałym przełożeniu kinematycznym ma zmienne przełożenie momentowe.
160 Rozkład sił w rzeczywistej walcowej przekładni o zębach prostych W rzeczywistej przekładni wskaźnik zazębienia > 1. Trudno określić jaką część obciążenia przenosi jedna para zębów a jaką druga ze względu na wpływ wartości wskaźnika zazębienia oraz odchyłek wykonania. U C W = 4/3 = 1,33
161 Sprawność w przekładni walcowej o zębach prostych W rzeczywistej przekładni, przy stałym obciążeniu koła biernego M 2, moment M 1, rozwijany na kole czynnym, równoważy to obciążenie oraz straty na tarcie w zazębieniu. Przyjmuje się, że niezależnie od położenia punktu przyporu straty tarcia są stałe i mają wartość średnią rzeczywiście występujących strat. Straty tarcia uwzględniane są przez wprowadzenie sprawności zazębienia. D9 ( )
162 Sprawność w przekładni walcowej o zębach prostych Sprawność przekładni jest to iloraz mocy N 2 otrzymanej na kole biernym do mocy N 1 dostarczonej na koło czynne: N N M M M M M 1,2 moment rozwijany na kole czynnym 1 i kole biernym 2, 1,2 prędkość kątowa koła czynnego 1 i biernego 2 Po przekształceniu otrzymamy: i 2 M1 M i
163 Projektowanie reduktorów
164 Projektowanie reduktorów Przełożenie wielostopniowej przekładni przełożenie całkowite przekładni jest iloczynem przełożeń cząstkowych i n-1 i 1 n n1 n i 1 i n-1 n i i i... i 1 2 n1 i A i B i C , ze względów geometrycznych zalecany jest rosnący ciąg przełożeń cząstkowych. i D i i i n1 i
165 Projektowanie reduktorów - zalecenia - przełożenie maksymalne jednego stopnia i max 10, zaś przełożenie minimalne i min 3 4, - liczba zębów zębnika zazwyczaj w przedziale 8 12, a więc mniejsza niż z g, - ze względów technologicznych moduł kół zębatych nie powinien być mniejszy niż 0,3 mm, - wskazane jest, aby koła zębate w przekładni miały możliwie mało zróżnicowane moduły, - zalecany jest ewolwentowy zarys zębów o parametrach zgodnych z podanymi w normach.
166 Projektowanie przekładni zębatych

167 Projektowanie przekładni zębatych
168 Przekładnie z luzem obwodowym W przekładniach pracujących ruchem rewersyjnym (nawrotnym) kątowy luz martwy powinien być możliwie mały. Luz martwy koła napędzającego przy nieruchomym wałku napędzanym (czyli zredukowany do wałka czynnego) w zazębieniu jednostopniowej przekładni zębatej jest równy: L r 1 L sumaryczny luz obwodowy wyrażony w mm na okręgu podziałowym, r 1 - promień okręgu podziałowego koła czynnego
169 Przekładnie z luzem obwodowym W przekładniach wielostopniowych wpływ luzu w zazębieniu poszczególnych stopni przekładni jest różny. Martwy luz przekładni zredukowany do wałka czynnego wynosi: 1 2 i1 3 i1 i2... n 1 i1... in 2 Jest to luz wałka czynnego pierwszego stopnia przekładni przy unieruchomionym wałku wyjściowym, tj. wałku biernym ostatniego stopnia. 1,...,, 2 n 1 - są luzami martwymi w zazębieniu kolejnych stopni przekładni.
170 Przekładnie z luzem obwodowym Zmniejszenie wartości luzu można osiągnąć przez: - zmniejszenie luzu obwodowego poszczególnych stopni (należy stosować zarys bez konstrukcyjnego luzu obwodowego), - właściwy dobór wartości przełożeń cząstkowych powinny one tworzyć ciąg rosnący - czyli i 1 < i 2 < i 3 <... < i n-1 Całkowitą likwidację luzu martwego ( = 0) można osiągnąć przez zastosowanie przekładni z kasowanym luzem obwodowym.

171 Kasowanie luzu w przekładni zębatej Przekładnia z kołami nożycowymi
172 Kasowanie luzu w przekładni zębatej Przekładnia z dociskanymi osiami
173 Kasowanie luzu w przekładni zębatej Przekładnia ze sprężyną zwrotną
174 Walcowa przekładnia śrubowa

175 Walcowa przekładnia śrubowa W celu wykonania linii śrubowej zębów zębatka lub frez muszą być pochylone, w stosunku do położenia przy wykonywaniu zębów prostych, o kąt - pochylenia linii śrubowej. Wikipedia Oznacza to, że wymiary związane z wysokością a także dotyczące grubości zębów, mierzone w przekroju normalnym do linii zęba - są identyczne jak w zębach prostych.
176 Walcowa przekładnia śrubowa c czołowy kąt zarysu, podziałowy kąt zarysu p c podziałka czołowa, p n podziałka normalna, m c moduł czołowy, m moduł normalny (znormalizowany) kąt pochylenia linii zęba
177 Walcowa przekładnia śrubowa Kąt zarysu narzędzia jest nominalnym (podziałowym) kątem zarysu zębów w przekroju normalnym do linii zębów koła. Ruch toczny odbywa się w płaszczyźnie czołowej (prostopadłej do osi obrotu koła) więc parametry kół zębatych o zębach śrubowych należy rozpatrywać w dwóch płaszczyznach, w przekroju normalnym N-N oraz czołowym C-C.
178 Walcowa przekładnia śrubowa Z oznaczonych trójkątów wynika, że: cos h tg h tg c tg c tg cos Analogicznie słuszne są także następujące zależności: p c pn cos m c m cos
179 Walcowa przekładnia śrubowa Wymiary koła zębatego Wymiary koła o zębach śrubowych są podawane w płaszczyźnie czołowej. - średnica podziałowa: d m c z m z cos - średnica wierzchołków: z da mc z 2 y m m 2y cos z - średnica podstaw (stóp): df mc z 2 um m 2u cos - nominalna odległość osi: a m 0 1 z cos d d 0, z 0,

180 Walcowa przekładnia śrubowa o równoległych osiach Poprawna praca kół o zębach śrubowych wystąpi wówczas gdy, w płaszczyźnie normalnej do linii zęba, zapewniona będzie w obu kołach równość modułu m oraz podziałowego kąta zarysu o. Równoległość osi zostanie zachowana wtedy, gdy kąt pochylenia linii zęba obu kół będzie równy co do wartości lecz przeciwny co do znaku (+, - ).
181 Walcowa przekładnia śrubowa Właściwości a) bardziej płynna (równomierna) i cichsza praca, niż przekładni o zębach prostych, Dzięki pochyleniu linii zębów wchodzą one we współpracę nie całą swą szerokością lecz stopniowo. Z tego zaś wynika, że wartość wskaźnika zazębienia (przyporu) musi być większa. W przekładni śrubowej jest on sumą dwóch wskaźników czołowego c i poskokowego s : c s
182 Walcowa przekładnia śrubowa Czołowy wskaźnik zazębienia - c Czołowy wskaźnik przyporu - c wyznacza się w płaszczyźnie czołowej koła zębatego tak, jak dla kół o zębach prostych. Zamiast kąta przyporu określonego w płaszczyźnie normalnej przyjmuje się kąt przyporu c wyznaczony w płaszczyźnie czołowej. Wartość czołowego wskaźnika przyporu c jest zatem ograniczona do wartości od około 1,2 do około 1,89, gdy liczby zębów kół dążą do nieskończoności ( = 20 0 ).
183 Walcowa przekładnia śrubowa Poskokowy wskaźnik zazębienia - s Przy dużej szerokości wieńca b, dużym kącie pochylenia linii śrubowej i małym module m wartość poskokowego wskaźnika zazębienia może być bardzo duża. b szerokość wieńca koła zębatego s s p c b tg m c b tgcos m s b m sin
184 Walcowa przekładnia śrubowa Właściwości b) większa wytrzymałość zębów śrubowych niż prostych. Przy tej samej szerokości wieńca obu kół długość linii zęba śrubowego jest większa, gdyż jest on usytuowany skośnie. c) zębniki w przekładni śrubowej mogą mieć mniej zębów niż w przekładni prostej. Graniczna liczba zębów w kołach o zębach śrubowych z g jest mniejsza niż z g wyznaczona dla kół o zębach prostych.
185 Walcowa przekładnia śrubowa Koło ściśle styczne Przekrój walca podziałowego koła śrubowego płaszczyzną prostopadłą do linii zęba daje elipsę. Zastąpiono ją kołem ściśle stycznym do tej elipsy w punkcie C. Koło ściśle styczne jest kołem zastępczym, czyli takim hipotetycznym kołem zębatym o zębach prostych, którego promień okręgu podziałowego jest równy promieniowi krzywizny elipsy w punkcie C.
186 Walcowa przekładnia śrubowa Zastępcza liczba zębów - z zast Zastępcza liczba zębów z zast danego koła śrubowego o liczbie zębów z, to taka liczba zębów prostych, która mieści się na obwodzie koła ściśle stycznego tego koła śrubowego. z zast z cos 3 Koło ściśle styczne ma zatem zastępczą liczbę zębów prostych równą z zast. Każde koło śrubowe ma swoje koło ściśle styczne o liczbie zębów z zast zależnej od kąta oraz liczby zębów koła z.
187 Walcowa przekładnia śrubowa Graniczna liczba zębów - z g Jeśli zatem z zast z g, to nie wystąpi podcinanie zębów koła śrubowego podczas obróbki Graniczna liczba zębów koła śrubowego - z g to taka liczba zębów tego koła przy której koło ściśle styczne będzie miało wymiary okręgu podziałowego walcowego koła o zębach prostych i granicznej liczbie zębów z g. z g z g cos 3 Jest to wzór przybliżony, jego błąd rośnie wraz z wartością kąta.
188 Walcowa przekładnia śrubowa Graniczna liczba zębów - z g z g z g cos 3 Dla każdego kąta > 0 graniczna liczba zębów z g < z g. Aby podczas obróbki koła śrubowego nie występowało podcinanie zębów musi być spełniony warunek z z g. W przeciwnym przypadku należy koło korygować lub przez zmianę wartości kąta uzyskać zmniejszenie z g.
189 Rozkład sił w przekładni śrubowej 2M P o d M - moment obciążenia, P 0 siła obwodowa, P r siła promieniowa, P w siła wzdłużna, P n siła międzyzębna, P p siła poprzeczna
190 cos tg P P tg P o o c o r tg P P o w cos cos P P P P P o o w r o n Rozkład sił w przekładni śrubowej
191 Reakcje w łożyskach od sił P p oraz P w P w P 0 P r P p A R B R Aw R A B Reakcje R A i R B są wynikiem działania sił P p oraz P w. P w P tg o P p P 2 0 P 2 r
192 Wpływ kąta pochylenia linii zęba na parametry przekładni śrubowej Zwiększenie wartości kąta powoduje: zwiększenie wymiarów koła, (powiększa się wartość modułu czołowego m c ), zwiększenie wartości siły wzdłużnej P w, (a także reakcji w łożyskowaniu wałka), zwiększenie wartości wskaźnika zazębienia, gdyż powiększy się wartość poskokowego wskaźnika zazębienia s., zmniejszenie granicznej liczby zębów z g.
193 Wpływ kąta pochylenia linii zęba na parametry przekładni śrubowej Ze względu na konieczność ograniczenie wartości siły wzdłużnej zaleca się przyjmować kąt Jeśli nie jest to możliwe należy: zastosować łożyskowanie wałka przystosowane do przeniesienia dużej siły wzdłużnej, umieścić obok siebie dwa koła śrubowe o kątach pochylenia linii zęba identycznych co do wartości lecz przeciwnych znaków (+ i -), zastosować koła o uzębieniu daszkowym.
194 Wewnętrzne zamknięcie sił wzdłużnych w kołach podwójnych w kole daszkowym w dwóch kołach śrubowych osadzonych na jednym wałku


195 Koła o zębach daszkowych
196 Przekładnia śrubowa walcowa o osiach wichrowatych Do poprawnej współpracy kół o zębach śrubowych i osiach nierównoległych wymagana jest równość modułu m oraz podziałowego kąta zarysu o określonych w płaszczyźnie normalnej do linii zęba.
197 Przekładnia śrubowa walcowa o osiach wichrowatych Jeśli zestawi się przekładnię z dwóch kół śrubowych o różnych kątach 1 i 2, ( 1 2 ) to osie tych kół będą wichrowate. 1 2
198 Przekładnia śrubowa walcowa o osiach wichrowatych Rozkład sił i prędkości v n 1 d 2 1 cos 1 v n 2 d 2 2 cos d d 2 1 cos cos Przełożenie zależy nie tylko od średnic podziałowych kół d 1 i d 2, ale także od kątów pochylenia linii zęba kół 1 i 2. i 2 1 z z 2 1
199 Przekładnia śrubowa walcowa o osiach wichrowatych i 1 2 d d 2 1 cos cos 2 1 z z 2 1 a) gdy 1 = 2 oraz d 1 d 2 to przełożenie przekładni jest takie jak w przekładniach o osiach równoległych, czyli: b) gdy 1 2 lecz d 1 = d 2 to przełożenie przekładni zależy od kątów 1 i 2 pochylenia linii śrubowej zębów i jest równe: i i d d 2 1 cos cos 2 1
200 Cechy przekładni śrubowej o osiach wichrowatych ze względu na złe przyleganie zębów (punktowy styk zębów) przekładnia nadaje się tylko do przenoszenia małych obciążeń, przekładnia najczęściej występuje w wersji z kątem między osiami = 90 0 a przełożenie zwykle zawiera się w przedziale 1/4 i 4 wykonanie kół jest łatwe lecz dość trudny ich montaż, może być samohamowna, rzadko stosowana w drobnych mechanizmach
201 Sprawność Sprawność przekładni śrubowej o osiach wichrowatych Kąt pochylenia linii zęba 1 Kąt osi = 90 0, współczynnik tarcia = 0,1, kąt = 20 0
202 Cechy przekładni śrubowej o osiach wichrowatych sprawność przekładni jest mniejsza niż przekładni o osiach równoległych (występują dodatkowo straty na tarcie ze względu na poślizg wzdłuż linii zęba), sprawność przekładni jest zadowalająca dla kątów 1 zawartych w przedziale , możliwa jest samohamowność przekładni, gdy kąt 2 ( ),
203 Przekładnia o osiach równoległych i zębach prostych albo śrubowych Porównanie
204 Przekładnia prosta i śrubowa Porównanie 1. Wymiary geometryczne: koła o zębach śrubowych są większe, gdyż moduł czołowy m c m cos 2. Graniczna liczba zębów dla kół o zębach śrubowych jest mniejsza niż dla kół o zębach prostych z g < z g z g z g cos 3. Wskaźnik zazębienia przekładni z kołami o zębach śrubowych jest większy niż przekładni z kołami o zębach prostych: ponieważ s, przy czym: s jest poskokowym wskaźnikiem zazębienia. 3
205 Przekładnia prosta i śrubowa Porównanie 4. Obciążenia łożysk wałka W przekładni śrubowej występuje składowa wzdłużna P w siły międzyzębnej. Wywołuje ona następujące reakcje w łożyskach wałka: - reakcja wzdłużna R w, - reakcje poprzeczne R A oraz R B. W przekładni z kołami o zębach prostych nie ma sił wzdłużnych, a zatem łożyska wałka są obciążone tylko siłami poprzecznymi.
206 Przekładnie ślimakowe Z10 (19.04)
207 Przekładnie ślimakowe - rodzaje Podział ze względu na wartość przełożenia: zwalniające (reduktory) przyspieszające (multiplikatory) Podział ze względu na przeznaczenie: przekładnie napędowe, przekładnie podziałowe (pozycjonujące) Podział ze względu na wartość modułu: przekładnie drobnomodułowe (m o <1 mm), przekładnie maszynowe (m o 1 mm) Podział ze względu na kierunek zwojów: prawe (a), lewe (b)
208 Przekładnie ślimakowe - rodzaje ze ślimakiem walcowym ze ślimakiem globoidalnym

209 Przekładnie ślimakowe z kasowanym luzem D10 (c w10.05) Przekładnia ze ślimakiem walcowym dwuskokowym


210 Przekładnie ślimakowe z kasowanym luzem Przekładnia ślimakowa ze ślimacznicą w postaci koła nożycowego
211 Przekładnie ślimakowe z kasowanym luzem Przekładnia ślimakowa ze ślimakiem: a) stożkowym, b) dzielonym
212 Walcowa przekładnia ślimakowa
213 Kształt i wykonanie zębów ślimaka
 pseudospiralny, c)")
214 Wykonanie ślimaków o różnym zarysie a) spiralny, b) pseudospiralny, c) ewolwentowy
215 Śrubowa powierzchnia prostoliniowa Przypadek ogólny
216 Ślimaki Archimedesa Toczenie ślimaka Archimedesa
217 Ślimaki ewolwentowe

218 Obwiedniowa obróbka koła ślimakowego
219 Liczba zębów ślimaka i ślimacznicy Zalecane liczby zębów (zwojów) ślimaka: według norm rosyjskich z 1 = 1, 2 oraz 4 według Buckinghama z 1 = 1, 3, 6, 12, 18 i 24 według Tuplina przeniesienie największego momentu Zalecane liczby zębów ślimacznicy: zwykle Z > 28 z 1 - liczba całkowita najbliższa ilorazu (40/i) z 1 liczba całkowita najbliższa ilorazu (25/i) na ogół przyjmuje się, że suma zębów ślimaka i ślimacznicy z + Z 40
220 Podstawowe parametry geometryczne przekładni ślimakowej
221 Przekładnia ślimakowa Moduł osiowy m 0 Ślimak jest śrubą modułową i jest wykonywany na tokarkach do toczenia gwintów modułowych. Tokarki te mają możliwość realizowania posuwów będących wielokrotnością liczby. Dla ślimaka jednozwojnego ta krotność liczby jest modułem w przekładni ślimakowej. Biorąc to pod uwagę jako nominalną przyjęto podziałkę osiową ślimaka p o : p o m o m o moduł osiowy o znormalizowanych wartościach
222 Przekładnia ślimakowa Znormalizowane wartości modułu osiowego m o wg PN-M-88527:1993 0,10 0,125 0,16 0,20 0,25 0,315 0,40 0,50 0,63 0,8 1,0 1,25 1,6 2,0 2,5 3,15 4,0 Zezwala się na stosowanie modułów: 0,12; 0,15; 0,30; 0,60; 1,5; 3,0;
223 Przekładnia ślimakowa Ślimak odniesienia wg PN-M-88529:1991 (m o 1 mm) m o moduł osiowy wg PN-M-88527:1993 h a wysokość głowy zwoju, h a = m o, h f wysokość stopy zwoju, h f = 1,2m o h wysokość zwoju, h = 2,2m o, C 1 luz wierzchołkowy, C 1 = 0,2m o, s obliczeniowa grubość zwoju, f1 promień krzywizny linii przejściowej, f1 = 0,3m o Dopuszcza się przyjmować dowolny kształt krzywej przejściowej.
224 Przekładnia ślimakowa drobnomodułowa Ślimak odniesienia wg PN-M-88531:1991 (m o < 1 mm) m o moduł osiowy wg PN-M-88527:1993 h a wysokość głowy zwoju, h a = m o, h f wysokość stopy zwoju, h f = 1,4m o h wysokość zwoju, h = 2,4m o, C 1 luz wierzchołkowy, C 1 = 0,4m o, s obliczeniowa grubość zwoju, f1 promień krzywizny linii przejściowej, f1 = 0,397m o Dopuszcza się przyjmować dowolny kształt krzywej przejściowej 0,3m o <<0,45m o.
225 Przekładnia ślimakowa Podstawowe parametry W rozwinięciu linia śrubowa ślimaka jest trójkątem prostokątnym. S d tg S d S skok linii śrubowej zwojów ślimaka, d średnica podziałowa, - kąt wzniosu linii śrubowej ślimaka, z liczba (krotność) zębów ślimaka, p o podziałka ślimaka S zp z o m o

226 Przekładnia ślimakowa Podstawowe parametry Po porównaniu prawych stron otrzymamy: d m z tg Jako jeden z parametrów ślimaka przyjmuje się wskaźnik średnicowy q : z q tg Znormalizowane wartości wskaźnika średnicowego q wg PN-M :1993 o
227 Przekładnia ślimakowa Wskaźnik średnicowy - q d q m o tg z q - wzrost wartości wskaźnika q powiększa średnicę ślimaka a zmniejsza kąt wzniosu linii śrubowej, jeśli skok ślimaka pozostanie stały, - mała wartość wskaźnika q zmniejsza sztywność ślimaka, - ograniczenie liczby stosowanych wartości wskaźnika średnicowego q zmniejsza liczbę narzędzi niezbędnych do wykonania ślimacznicy.
228 Przekładnia ślimakowa Podstawowe parametry Kąt wzniosu linii śrubowej ślimaka - (mierzony na walcu podziałowym) S d tg S d z po d z m d o z q S skok zwojów ślimaka p o podziałka osiowa ślimaka, p o = m o
229 Przekładnia ślimakowa Wymiary ślimaka - średnica podziałowa ślimaka: d mo z tg m o q z - średnica wierzchołków ślimaka: da mo 2y tg - średnica podstaw ślimaka: m o moduł osiowy ślimaka i ślimacznicy, z liczba zębów (zwojność, krotność) ślimaka, kąt wzniosu linii śrubowej zwoju ślimaka y współczynnik wysokości głowy, y = 1, u współczynnik wysokości stopy, u = 1,2 dla m o 1 albo u = 1,4 dla m o < 1 mm (dla ślimaków spiralnych w obu przypadkach kąt wzniosu linii śrubowej < 15 o ) d f m o z tg 2u
230 Przekładnia ślimakowa Zalecana długość ślimaka - zalecana długość ślimaka, gdy z = 1 lub 2 L Zmo - zalecana długość ślimaka, gdy z = 4 L 12,5 0,09 Zmo
231 Przekładnia ślimakowa Wymiary ślimacznicy - średnica podziałowa ślimacznicy: D m o Z - średnica wierzchołków ślimacznicy: D a m o Z 2y - średnica podstaw ślimacznicy: D f m o Z 2u Z liczba zębów ślimacznicy, wartości współczynników y oraz u jak dla ślimaka.
232 Przekładnia ślimakowa Wymiary ślimacznicy - szerokość b uzębionej części wieńca ślimacznicy: b 2 q 1 m o - całkowita szerokość b c wieńca ślimacznicy: b b c m o q wskaźnik średnicowy ślimaka.
233 Przekładnia ślimakowa Wymiary przekładni - rozstawienie osi kół: a 0,5m o z tg Z m o moduł osiowy ślimaka i ślimacznicy, z liczba zębów (zwojność, krotność) ślimaka, Z liczba zębów ślimacznicy, kąt wzniosu linii śrubowej zwoju ślimaka

234 Rozkład sił międzyzębnych w przekładni ślimakowej
235 Przekładnia ślimakowa Rozkład sił międzyzębnych P P P 1 w1 r1 P w2 P P 2 r 2
236 Siła obwodowa ślimacznicy: Przekładnia ślimakowa Rozkład sił międzyzębnych 2M P 2 2 D Siła tarcia T odchyla siłę P s o kąt tarcia : P 2 1 P tg '
237 Przekładnia ślimakowa Rozkład sił międzyzębnych Siła promieniowa P r1 jest równa: P r1 P s tg o P s P' cos' P r1 P 1 tg sin o cos' '
238 Przekładnia ślimakowa Rozkład sił międzyzębnych Kąt jest pozornym kątem tarcia obliczanym z zależności: ' arctg cos o - współczynnik tarcia materiałów ślimaka i ślimacznicy, o nominalny kąt zarysu
239 Przekładnia ślimakowa Rozkład sił międzyzębnych Siła poprzeczna P p1 obciążająca ślimak: P p1 P 2 1 P 2 r1
240 Przekładnia ślimakowa Rozkład sił międzyzębnych Siła poprzeczna P p2 obciążająca ślimacznicę: P p2 P 2 2 P 2 r2 Każda z tych sił wywołuje reakcje poprzeczne w łożyskach wałków ślimaka i ślimacznicy.
241 Sprawność przekładni ślimakowej
242 Sprawność przekładni ślimakowej L L 2 1 P 1 P2 S d 1 Przekładnie ślimakowe zwykle pracują jako reduktory, czyli są napędzane od strony ślimaka. L 1 praca dostarczona podczas jednego obrotu ślimaka, L 2 praca otrzymana na ślimacznicy, S skok ślimaka
243 Sprawność przekładni ślimakowej tg tg ' kąt wzniosu linii śrubowej ślimaka na okręgu podziałowym, pozorny kąt tarcia, tg =, obliczeniowy współczynnik tarcia ' arctg' arctg cos o

244 Sprawność przekładni ślimakowej

245 Współczynnik tarcia międzyzębnego Wykres Hiersiga A ślimak utwardzony, zwoje szlifowane B ślimak nieutwardzony, zwoje toczone prędkość poślizgu
246 Samohamowność przekładni ślimakowych
247 Przekładnia ślimakowa Samohamowność Samohamowność przekładni ślimakowej oznacza, że nie można wywołać jej ruchu przykładając moment napędzający do ślimacznicy. Sprawność przekładni, określona przy napędzie od strony ślimacznicy jest równa: ' tg ' tg Samohamowność wystąpi wtedy, gdy 0.
248 Przekładnia ślimakowa Samohamowność Warunek 0 będzie spełniony wtedy, gdy: kąt, kąt = /2 ( = 0). ' tg ' tg W drugim przypadku nie ma możliwości przekazania ruchu. ' Warunek samohamowności przekładni ślimakowej.
249 Właściwości przekładni ślimakowych
250 Przekładnia ślimakowa Właściwości umożliwia realizację dużego przełożenia w jednym stopniu, i > 8, w przekładniach przenoszących moc stosuje się przełożenie 25 i 200, w przekładniach nastawczych przełożenie może dochodzić nawet do i 500, uzyskiwanie małych przełożeń (i 7) jest trudne, gdyż ze względów technologicznych liczba zębów ślimacznicy Z > 28 zaś zwojność (krotność) ślimaka najczęściej z = 1, 2, 4;
251 Przekładnia ślimakowa Właściwości płynne zazębienie i cichobieżność, możliwość dużej obciążalności przekładni (obciążenie jest przejmowane jednocześnie przez kilka zębów ślimacznicy, dobre przyleganie zębów), w przekładni walcowej tylko ślimacznica ma wieniec wklęsły, zaś w przekładni globoidalnej również ślimak jest wklęsły, przekładnia ślimakowa jak śruba i nakrętka (ślimak pełni rolę śruby a ślimacznica nakrętki) w drobnych mechanizmach stosowane są uproszczone przekładnie ślimakowe.
252 Kątowe przekładnie zębate
253 Przekładnia stożkowa - umożliwia przeniesienie napędu przy osiach przecinających się pod kątem: przełożenie przekładni: 1,2 kąty (półkąty) stożków podziałowych koła 1 i 2 i z z 2 1 sin sin 2 1

254 Przekładnia stożkowa - koła stożkowe wykonuje się na specjalnych obrabiarkach, np. koła o zębach prostych na strugarce Gleasona - dokładne wykonanie kół jest bardzo trudne - wymagany jest dokładny montaż kół w celu zapewnienia przecięcia osi - występuje jednostronne łożyskowanie przynajmniej jednego z wałków
255 Przekładnia stożkowa - przełożenie jednego stopnia 1/5 i 5, w przekładniach napędowych - przełożenie jednego stopnia 1/10 i 10, w przekładniach nastawczych - wymiary kół rozpatruje się na zewnętrznym obwodzie wieńca, czyli w najgrubszym przekroju poprzecznym zęba (na powierzchni stożków dopełniających), - zmienny przekrój wzdłuż linii zęba, powoduje spiętrzenie naprężeń w największym przekroju zęba (korzystniejszy rozkład naprężeń przy zębach łukowych).
256 Przekładnia stożkowa - występuje także duże obciążenie łożysk siłami wzdłużnymi, P n siła normalna do linii zęba, P s składowa siły P n prostopadła do tworzącej stożka podziałowego, P o składowa P n obwodowa działajaca na średniej średnicy, P r składowa siły P s działająca promieniowo, P w składowa siły P s działająca wzdłuż osi
257 Przekładnia stożkowa - średnica podziałowa d m z - średnica wierzchołków m z 2 y d a cos y = 1, u = 1,25, gdy m 1 u = 1,4, gdy m < 1 - średnica podstaw d f m - szerokość wieńca b b z 2 u cos l


258 Przekładnia stożkowa



259 Przekładnia stożkowa Oferta handlowa kół stożkowych, np. z 1 /z 2 = 16/64, m = 1,5
260 Przekładnia planetarna (obiegowa)

261 Przekładnia planetarna Zasada działania



262 Przekładnia planetarna - budowa
263 Przekładnia planetarna (obiegowa) Przekładnia Jamesa Watta 1 koło centralne (pierścieniowe), 2 koło planetarne (obiegowe, satelita), 3 jarzmo, 4 koło centralne (słoneczne)
264 Przekładnia planetarna (obiegowa) Przekładnia Jamesa Watta Przekładnia może pracować w kilku wariantach: nieruchome jest koło centralne 1 (pierścieniowe), nieruchome jest koło centralne 4 (słoneczne), nieruchome jarzmo 3 (przekładnia przestaje być wtedy planetarna). żaden z elementów (koła 1 i 4 ani jarzmo 3) nie jest unieruchomiony. W takim przypadku przekładnia staje się mechanizmem różnicowym i ma dwa stopnie swobody.
265 Przekładnia planetarna (obiegowa) Przekładnia Jamesa Watta gdy nieruchome jest koło 1 (napęd jest przekazywany z koła 4 na jarzmo 3): 4 z1 i4 j 1 z gdy nieruchome jest koło 4 (napęd jest przekazywany z koła 1 na jarzmo 3): 1 z4 i1j 1 z j gdy nieruchome jest jarzmo 3 (napęd jest przekazywany z koła 1 na koło 4): 1 z4 i14 z j 4

266 Przekładnia planetarna (obiegowa) Przekładnia Jamesa Watta 1 koło centralne (pierścieniowe), 2 koło planetarne (obiegowe, satelita), 3 jarzmo, 4 koło centralne ( słoneczne ) Przykład: z 1 = 50, z 2 = 20, z 4 = 10 Możliwe do uzyskania przełożenia: i 43 = 6, i 34 = 1/6, nieruchome koło pierścieniowe 1 i 13 = 6/5, i 31 = 5/6, nieruchome koło centralne 4 i 14 = 1/5, i 41 = 5, nieruchome jarzmo 3
267 Przekładnia planetarna podwójna Przy napędzie od koła centralnego 1 przekładnia jest reduktorem o przełożeniu: i 1j 1 j 1 z z 2 1 z z 4 3 Przy napędzie od jarzma 5 przekładnia jest przekładnią przyspieszającą (muliplikatorem) o przełożeniu: 1 koło centralne (słoneczne), 2, 3 satelita, 4 koło centralne (pierścieniowe), 5 - jarzmo i j1 j z2 z 1 z z 4 3
268 Przekładnia planetarna Właściwości mają duże przełożenie a jednocześnie pozwalają na uzyskanie zwartej konstrukcji, są stosowane jako reduktory do silników elektrycznych DC (realizują różne przełożenia w jednej obudowie, są oferowane wraz z silnikami), sprawność przekładni planetarnej maleje wraz ze wzrostem jej przełożenia, gdy sprawność jest mniejsza niż 50% przekładnia może być samohamowna.
269 Przekładnia planetarna Właściwości mają dosyć złożoną konstrukcję, są trudne i kosztowne do wykonania (np. kłopotliwa obróbka koła o uzębieniu wewnętrznym), wymagają dokładnego wykonania i bardzo starannego montażu, bardzo trudne jest zapewnienie równomiernego rozłożenia obciążenia na kilka satelitów, przekładnie planetarne są produkowane przez zakłady o odpowiednio poziomie technologicznym,


270 Przekładnia planetarna Zastosowanie




271 Przekładnia planetarna Zastosowanie
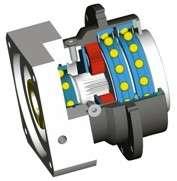
272 Przekładnie falowe D11 (c12.05-w17.05) Z11 (25.04)
273 Przekładnia falowa - budowa Współczesny rozwój przemysłu maszynowego, precyzyjnego, militarnego, itp. postawił nowe wymagania układom napędowym robotów i manipulatorów przemysłowych oraz układom nastawczym obrabiarek bądź urządzeń militarnych. Te wymagania to: duże wartości przełożeń w jednym stopniu (od kilkudziesięciu do kilkuset), minimalizacja gabarytów i masy, duża dokładność pozycjonowania, mały moment bezwładności zredukowany do wałka wejściowego, brak luzu martwego, zdolność tłumienia drgań,
274 Przekładnia falowa - budowa wysoka trwałość i sprawność, nie gorsza niż w wielostopniowych przekładniach obiegowych o porównywalnym przełożeniu, cichobieżność, szczególnie w górnym zakresie prędkości eksploatacyjnych, w szczególnych zastosowaniach hermetyczność przy przekazywaniu mocy, np.: w manipulatorach i robotach pracujących pod wodą lub w środowisku aktywnym chemicznie. Tym wymaganiom nie były w stanie sprostać dotychczas stosowane przekładnie, m. in. planetarne. W 1959 C.W. Musser z USA otrzymał patent na przekładnię harmoniczną, zwaną w Polsce przekładnią falową. Rok później była ona pokazana na wystawie w Nowym Jorku.

275 Przekładnia falowa - budowa Przekładnia falowa składa się z trzech elementów: koła pierścieniowego 2, podatnego cienkościennego walca 1 oraz generatora 3, wywołującego odkształcenie walca 1. Zasada działania: ruch jest przenoszony przez obtaczanie wewnątrz koła 2 odkształconego walca 1. Zwykle stosowany jest generator dwufalowy, który odkształca cienkościenny walec w owal (w przekroju poprzecznym zbliżony do elipsy). W miejscach największego odkształcenia (wzdłuż dużej osi elipsy) następuje współpraca powierzchni roboczych elementu sztywnego i podatnego, natomiast wzdłuż małej osi elipsy między tymi członami występuje luz promieniowy.


276 Przekładnia falowa - budowa Najczęściej stosowane są falowe (harmoniczne) przekładnie zębate, rzadziej falowe przekładnie cierne oraz gwintowe.
277 Przekładnia falowa zębata
278 Przekładnie falowe zębate Przekładnia zębata falowa składa się z trzech podstawowych członów: cylindra 1 ze sztywnym dnem i z podatną powierzchnią boczną na której wykonano uzębienie zewnętrzne, sztywnego korpusu 2, w kształcie pierścienia z uzębieniem wewnętrznym, generatora fali 3 w postaci cienkościennego łożyska tocznego osadzonego na eliptycznej krzywce.

279 Przekładnie falowe zębate - budowa


280 Przekładnie falowe zębate Zasada działania
281 Przekładnie falowe Uzębienie cylindra 1 i korpusu 2 ma taki sam moduł i parametry zarysu. Inne są liczby zębów z 1 i z 2, przy czym zawsze z 1 < z 2. Wzdłuż dużej osi elipsy generatora występuje zazębienie na pełną głębokość, wzdłuż małej osi brak współpracy zębów a w położeniach pośrednich występuje zazębienie na niepełną głębokość.
282 Przekładnie falowe Właściwości W przekładniach falowych zębatych stosuje się następujące zarysy zębów: - trójkątny zarys zębów, o kącie wierzchołkowym 60 0, - zarys ewolwentowy z podziałowym kątem zarysu: 0 = 20 0, gdy moduł m 0,4 mm, 0 = 30 0, dla modułów większych. - w strefie zazębienia współpracuje jednocześnie ponad 25% par zębów, - obciążenie pojedynczej pary zębów jest nieduże, co pozwala na zmniejszenie wymiarów zębów, - duża jest wartość wskaźnika zazębienia, co gwarantuje uzyskanie bardzo płynnej współpracy zębów, - bardzo mały luz martwy (kilka minut kątowych)
283 Przekładnie falowe zębate Przełożenie - przy nieruchomym korpusie 2 (najczęstszy przypadek) : i z 2 z1 z - przy nieruchomym podatnym wieńcu zębatym 1: i z 2 z2 z - przy nieruchomym generatorze fali 3: i z z z 1, z 2 - liczba zębów na powierzchni cylindra 1 i korpusu 2, znak - oznacza, że kierunki obrotu członów czynnego i biernego są przeciwne.
284 Przekładnie falowe zębate Zastosowanie Przekładnie falowe zębate znalazły szerokie zastosowanie w napędach robotów, gdyż: - umożliwiają uzyskanie dużych przełożeń w jednym stopniu (nawet 300), - przenoszą bardzo dużą moc w przeliczeniu na jednostkę objętości (pod tym względem są najlepsze ze wszystkich przekładni zębatych). - mają bardzo mały martwy luz (kilka minut kątowych) oraz dużą dokładność kinematyczną - trwałość standardowej przekładni klasycznej wynosi 20 tys. godzin, a specjalnych nawet 40 tysięcy godzin.
285 Przekładnie falowe cierne
286 Przekładnie falowe cierne Moment jest przenoszony przez siły tarcia między podatnym walcem 1 a korpusem 2 do którego walec 1 jest dociskany przez generator fali 3. Przełożenie przekładni, przy założeniu braku poślizgu między elementami 1 i 2, zależy od tego, który z jej elementów jest nieruchomy podczas pracy.
287 Przekładnie falowe cierne - przy nieruchomym korpusie 2 (najczęstszy przypadek): i d 2 d1 d 1 d 1 średnica zewnętrzna walca 1 (nieodkształconego), d 2 średnica walcowej powierzchni roboczej w korpusie 2, znak - oznacza, że kierunki obrotu członów czynnego i biernego są przeciwne.
288 Przekładnie falowe cierne - przy nieruchomym walcu 1: - przy nieruchomym generatorze 3 i d 2 d2 d 1 i d d 2 1
289 Przekładnie falowe gwintowe
290 Przekładnie falowe gwintowe W przekładni falowej gwintowej tuleja 2 oraz wieniec zębaty elastycznego kubka 1 mają nacięty gwint o takim samym skoku, kierunku zwojów i zarysie lecz o różniących się średnich średnicach. Elementem napędzającym jest generator fali 3. Jeśli kubek 1 pozostaje nieruchomy a tuleja 2 nie ma możliwości obrotu, liniowe przemieszczenie s tulei 2 wynosi: s P 2 d 2 d d 2 1 gdzie: P skok gwintu, d 1,2 - średnia średnica gwintu zewnętrznego nieodkształconego kubka 1 oraz gwintu w otworze tulei 2, - kąt obrotu generatora.
291 Przekładnie falowe gwintowe W przekładni falowej gwintowej można uzyskać kilka mikrometrów liniowego przemieszczenia członu wyjściowego dla jednego pełnego obrotu generatora. Dzięki temu, że jest to praktycznie przekładnia bezluzowa, możliwe jest uzyskanie bardzo dużej dokładności kinematycznej.

292 Przekładnie falowe Przykłady
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN
 POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN KOREKCJA ZAZĘBIENIA ĆWICZENIE LABORATORYJNE NR 5 Z PODSTAW KONSTRUKCJI MASZYN OPRACOWAŁ: dr inż. Jan KŁOPOCKI Gdańsk 2000
POMIAR KÓŁ ZĘBATYCH WALCOWYCH cz. 1.
 I. Cel ćwiczenia: POMIAR KÓŁ ZĘBATYCH WALCOWYCH cz. 1. 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić jego podstawowe parametry 2. Dokonać pomiaru grubości zęba suwmiarką modułową lub
I. Cel ćwiczenia: POMIAR KÓŁ ZĘBATYCH WALCOWYCH cz. 1. 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić jego podstawowe parametry 2. Dokonać pomiaru grubości zęba suwmiarką modułową lub
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Modyfikacja zarysu zębaz
 Modyfikacja zarysu zębaz METODY OBRÓBKI BKI KÓŁK ZĘBATYCH W obróbce zębów kół zębatych wyróżnia się dwie metody: metoda kształtowa. metoda obwiedniowa. metoda kształtowa metoda obwiedniowa W metodzie kształtowej
Modyfikacja zarysu zębaz METODY OBRÓBKI BKI KÓŁK ZĘBATYCH W obróbce zębów kół zębatych wyróżnia się dwie metody: metoda kształtowa. metoda obwiedniowa. metoda kształtowa metoda obwiedniowa W metodzie kształtowej
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
Koła zębate. T. 3, Sprawdzanie / Kazimierz Ochęduszko. wyd. 5, dodr. Warszawa, Spis treści
 Koła zębate. T. 3, Sprawdzanie / Kazimierz Ochęduszko. wyd. 5, dodr. Warszawa, 2012 Spis treści Część pierwsza Geometryczne zaleŝności w przekładniach zębatych I. Wiadomości podstawowe 21 1. Klasyfikacja
Koła zębate. T. 3, Sprawdzanie / Kazimierz Ochęduszko. wyd. 5, dodr. Warszawa, 2012 Spis treści Część pierwsza Geometryczne zaleŝności w przekładniach zębatych I. Wiadomości podstawowe 21 1. Klasyfikacja
Materiały pomocnicze do ćwiczenia laboratoryjnego z korekcji kół zębatych (uzębienia i zazębienia)
") Materiały pomocnicze do ćwiczenia laboratoryjnego z korekcji kół zębatych (uzębienia i zazębienia) 1. WPROWADZENIE Koła zębate znajdują zastosowanie w rozlicznych mechanizmach, począwszy od przemysłu zegarmistrzowskiego
Materiały pomocnicze do ćwiczenia laboratoryjnego z korekcji kół zębatych (uzębienia i zazębienia) 1. WPROWADZENIE Koła zębate znajdują zastosowanie w rozlicznych mechanizmach, począwszy od przemysłu zegarmistrzowskiego
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ogólna charakterystyka
 PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
PRZEKŁADNIE ogólna charakterystyka Większość maszyn nie może być napędzana bezpośrednio silnikiem i wymaga ogniwa pośredniczącego w postaci przekładni. Przekładnie są to mechanizmy służące do przenoszenia
OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH
 CZOŁOWE OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH Klasyfikacja przekładni zębatych w zależności od kinematyki zazębień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe)
CZOŁOWE OWE PRZEKŁADNIE WALCOWE O ZĘBACH Z BACH ŚRUBOWYCH Klasyfikacja przekładni zębatych w zależności od kinematyki zazębień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe)
(12) OPIS PATENTOWY (19)PL (11) (13) B1
 OPIS PATENTOWY (19)PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11)160312 (13) B1 (21) Numer zgłoszenia: 280556 (51) IntCl5: Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 04.07.1989 F16H 57/12 (54)
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017.
 Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017 Spis treści Przedmowa XV 1. Znaczenie przekładni zębatych w napędach
Przekładnie zębate : zasady działania : obliczenia geometryczne i wytrzymałościowe / Antoni Skoć, Eugeniusz Świtoński. Warszawa, 2017 Spis treści Przedmowa XV 1. Znaczenie przekładni zębatych w napędach
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI
 KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI TEMAT ĆWICZENIA: ĆWICZENIE NR 3 POMIAR KÓŁ ZĘBATYCH WALCOWYCH ZADANIA DO WYKONANIA: 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić
KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI TEMAT ĆWICZENIA: ĆWICZENIE NR 3 POMIAR KÓŁ ZĘBATYCH WALCOWYCH ZADANIA DO WYKONANIA: 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI
 KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI TEMAT ĆWICZENIA: ĆWICZENIE NR 3 POMIAR KÓŁ ZĘBATYCH WALCOWYCH ZADANIA DO WYKONANIA: 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić
KATEDRA TECHNOLOGII MASZYN I AUTOMATYZACJI PRODUKCJI TEMAT ĆWICZENIA: ĆWICZENIE NR 3 POMIAR KÓŁ ZĘBATYCH WALCOWYCH ZADANIA DO WYKONANIA: 1. Zidentyfikować koło zębate przeznaczone do pomiaru i określić
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY
 ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
ZACHODNIOPOMORSKI UNIWERSYTET TECHNOLOGICZNY w Szczecinie UNIWERSYT E ZACHODNIOPOMOR T T E CH LOGICZNY W SZCZECINIE NO SKI KATEDRA MECHANIKI I PODSTAW KONSTRUKCJI MASZYN ZAKŁAD PODSTAW KONSTRUKCJI MASZYN
Sposób kształtowania plastycznego wałków z wieńcami zębatymi
 Sposób kształtowania plastycznego wałków z wieńcami zębatymi Przedmiotem wynalazku jest sposób kształtowania plastycznego wałków z wieńcami zębatymi, zwłaszcza wałków drążonych. Przez pojecie wał drążony
Sposób kształtowania plastycznego wałków z wieńcami zębatymi Przedmiotem wynalazku jest sposób kształtowania plastycznego wałków z wieńcami zębatymi, zwłaszcza wałków drążonych. Przez pojecie wał drążony
Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate
 Wykład 3 Analiza kinematyczna przekładnie zębate") Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Politechnika Lubelska Katedra Podstaw Konstrukcji Maszyn i Mechatroniki Modelowanie wspomagające projektowanie maszyn (TMM) Wykład 3 Analiza kinematyczna przekładnie zębate Lublin 2017 Dr inż. Łukasz Jedliński
Wymiary tolerowane i pasowania. Opracował: mgr inż. Józef Wakuła
 Wymiary tolerowane i pasowania Opracował: mgr inż. Józef Wakuła Pojęcia podstawowe Wykonanie przedmiotu zgodnie z podanymi na rysunku wymiarami, z uwagi na ograniczone dokładności wykonawcze oraz pomiarowe
Wymiary tolerowane i pasowania Opracował: mgr inż. Józef Wakuła Pojęcia podstawowe Wykonanie przedmiotu zgodnie z podanymi na rysunku wymiarami, z uwagi na ograniczone dokładności wykonawcze oraz pomiarowe
(13) B1 F16H 1/16 F16H 57/12
 B1 F16H 1/16 F16H 57/12") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
ĆWICZENIE NR OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ
 ĆWICZENIE NR 6. 6. OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ 6.1. Zadanie technologiczne Dla zadanego rysunkiem wykonawczym
ĆWICZENIE NR 6. 6. OBRÓBKA UZĘBIENIA W WALCOWYM KOLE ZĘBATYM O UZĘBIENIU ZEWNĘTRZNYM, EWOLWENTOWYM, O ZĘBACH PROSTYCH, NA FREZARCE OBWIEDNIOWEJ 6.1. Zadanie technologiczne Dla zadanego rysunkiem wykonawczym
Przekładnie zębate. Rozdział
 4 1 Rozdział Przekładnie zębate Na rysunkach 4.1 i 4.2 pokazano najczęściej stosowane przekładnie z kołami walcowymi z uzębieniem zewnętrznym i z kołami stożkowymi. Przełożenie tych przekładni zwykle nie
4 1 Rozdział Przekładnie zębate Na rysunkach 4.1 i 4.2 pokazano najczęściej stosowane przekładnie z kołami walcowymi z uzębieniem zewnętrznym i z kołami stożkowymi. Przełożenie tych przekładni zwykle nie
Koła zębate. T. 1, Konstrukcja / Kazimierz Ochęduszko. wyd. 8, dodr. Warszawa, Spis treści
 Koła zębate. T. 1, Konstrukcja / Kazimierz Ochęduszko. wyd. 8, dodr. Warszawa, 2012 Spis treści 0. Wiadomości wstępne 25 1. Pojęcia podstawowe 25 2. Znamionowe cechy przekładni mechanicznych 25 3. Klasyfikacja
Koła zębate. T. 1, Konstrukcja / Kazimierz Ochęduszko. wyd. 8, dodr. Warszawa, 2012 Spis treści 0. Wiadomości wstępne 25 1. Pojęcia podstawowe 25 2. Znamionowe cechy przekładni mechanicznych 25 3. Klasyfikacja
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 06/15
 PL 221264 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221264 (13) B1 (21) Numer zgłoszenia: 405298 (51) Int.Cl. B23F 1/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 221264 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221264 (13) B1 (21) Numer zgłoszenia: 405298 (51) Int.Cl. B23F 1/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03
![Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03](/thumbs/25/4700452.jpg "Projektowanie i dobieranie zespołów maszyn 311[20].Z2.03") MINISTERSTWO EDUKACJI i NAUKI Marek Olsza Projektowanie i dobieranie zespołów maszyn 311[0].Z.03 Poradnik dla uczeń Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 005 0 Recenzenci:
MINISTERSTWO EDUKACJI i NAUKI Marek Olsza Projektowanie i dobieranie zespołów maszyn 311[0].Z.03 Poradnik dla uczeń Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom 005 0 Recenzenci:
(73) Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL
 Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL") RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
Sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą walcowania poprzecznego
 Sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą walcowania poprzecznego Przedmiotem wynalazku jest sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą
Sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą walcowania poprzecznego Przedmiotem wynalazku jest sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą
Nacinanie walcowych kół zębatych na frezarce obwiedniowej
 POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inż. Krzysztof Netter www.netter.strefa.pl
POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inż. Krzysztof Netter www.netter.strefa.pl
AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych. Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice
 AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice Streszczenie: W artykule opisano funkcje wspomagające
AutoCAD Mechanical - Konstruowanie przekładni zębatych i pasowych Radosław JABŁOŃSKI Wydział Mechaniczny Technologiczny Politechnika Śląska, Gliwice Streszczenie: W artykule opisano funkcje wspomagające
Tolerancje kształtu i położenia
 Strona z 7 Strona główna PM Tolerancje kształtu i położenia Strony związane: Podstawy Konstrukcji Maszyn, Tolerancje gwintów, Tolerancje i pasowania Pola tolerancji wałków i otworów, Układy pasowań normalnych,
Strona z 7 Strona główna PM Tolerancje kształtu i położenia Strony związane: Podstawy Konstrukcji Maszyn, Tolerancje gwintów, Tolerancje i pasowania Pola tolerancji wałków i otworów, Układy pasowań normalnych,
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN. Ćwiczenie OB-2 BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ
 POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
POLITECHNIKA ŁÓDZKA INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN Ćwiczenie OB-2 Temat: BUDOWA I MOŻLIWOŚCI TECHNOLOGICZNE FREZARKI OBWIEDNIOWEJ Opracował: mgr inż. St. Sucharzewski Zatwierdził: prof.
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227325 (13) B1 (21) Numer zgłoszenia: 408196 (51) Int.Cl. F16H 55/18 (2006.01) F16H 1/48 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ kierowniczy. Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek:
 1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
1 Układ kierowniczy Potrzebę stosowania układu kierowniczego ze zwrotnicami przedstawia poniższy rysunek: Definicja: Układ kierowniczy to zbiór mechanizmów umożliwiających kierowanie pojazdem, a więc utrzymanie
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 20/12
 PL 218402 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218402 (13) B1 (21) Numer zgłoszenia: 394247 (51) Int.Cl. B23F 5/27 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 218402 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218402 (13) B1 (21) Numer zgłoszenia: 394247 (51) Int.Cl. B23F 5/27 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 160314 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 280734 (22) Data zgłoszenia: 21.07.1989 (51) IntCl5: F16H 3/06 F16H
WYDZIAŁ ZARZĄDZANIA PODSTAWY TECHNIKI I TECHNOLOGII
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ZARZĄDZANIA KATEDRA ZARZĄDZANIA PRODUKCJĄ Instrukcja do zajęć laboratoryjnych z przedmiotu: PODSTAWY TECHNIKI I TECHNOLOGII Kod przedmiotu: ISO1123, I NO1123 Numer ćwiczenia:
Instytut Konstrukcji Maszyn, Instytut Pojazdów Szynowych 1
 1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
Precyzyjna przekładnia ślimakowa
 RZECZPO SPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164104 (13) B1 (21) Numer zgłoszenia: 288496 ( 5 1 ) IntCI5: F16H 1/16 F16H 57/02 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej
RZECZPO SPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164104 (13) B1 (21) Numer zgłoszenia: 288496 ( 5 1 ) IntCI5: F16H 1/16 F16H 57/02 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej
PL B1 (12) OPIS PATENTOWY (19) PL (11) (13) B1. fig.1 F16H 55/17 E21C 31/00 F04C 2/24 RZECZPOSPOLITA POLSKA
 OPIS PATENTOWY (19) PL (11) (13) B1. fig.1 F16H 55/17 E21C 31/00 F04C 2/24 RZECZPOSPOLITA POLSKA") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 181581 (21 ) Numer zgłoszenia: 317495 Urząd Patentowy (22) Data zgłoszenia: 12.12.1996 Rzeczypospolitej Polskiej (13) B1 (51) Int.Cl.7 F16H 55/17
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 181581 (21 ) Numer zgłoszenia: 317495 Urząd Patentowy (22) Data zgłoszenia: 12.12.1996 Rzeczypospolitej Polskiej (13) B1 (51) Int.Cl.7 F16H 55/17
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do projektowania część 3 Zespół napędu liniowego Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 07 Spis treści. Wyznaczenie liczby
Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do projektowania część 3 Zespół napędu liniowego Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 07 Spis treści. Wyznaczenie liczby
PL B1. Sposób walcowania poprzecznego dwoma walcami wyrobów typu kula metodą wgłębną. POLITECHNIKA LUBELSKA, Lublin, PL
 PL 218597 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218597 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394836 (22) Data zgłoszenia: 11.05.2011 (51) Int.Cl.
PL 218597 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 218597 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 394836 (22) Data zgłoszenia: 11.05.2011 (51) Int.Cl.
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop Spis treści
 Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Młody inżynier robotyki
 Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
Młody inżynier robotyki Narzędzia pracy Klocki LEGO MINDSTORMS NXT Oprogramowanie służące do programowanie kostki programowalnej robora LEGO Mindstorms Nxt v2.0 LEGO Digital Designer - program przeznaczony
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7
 Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Przedmiot : OBRÓBKA SKRAWANIEM I NARZĘDZIA Temat: Szlifowanie cz. II. KATEDRA TECHNIK WYTWARZANIA I AUTOMATYZACJI INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Nr ćwiczenia : 7 Kierunek: Mechanika i Budowa Maszyn
Badanie wpływu obciążenia na sprawność przekładni falowej
 Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk. Człowiek- najlepsza inwestycja
 Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
Danuta Jasińska Choromańska, Dariusz Kołodziej, Marcin Zaczyk WKPI Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego STOSOWANIE
STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH
 STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH Stereometria jest działem geometrii, którego przedmiotem badań są bryły przestrzenne oraz ich właściwości. WZAJEMNE POŁOŻENIE PROSTYCH W PRZESTRZENI 2 proste
STEREOMETRIA CZYLI GEOMETRIA W 3 WYMIARACH Stereometria jest działem geometrii, którego przedmiotem badań są bryły przestrzenne oraz ich właściwości. WZAJEMNE POŁOŻENIE PROSTYCH W PRZESTRZENI 2 proste
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Opis przedmiotu. Karta przedmiotu - Podstawy budowy maszyn II Katalog ECTS Politechniki Warszawskiej
 Kod przedmiotu TR.NIK408 Nazwa przedmiotu Podstawy budowy maszyn II Wersja przedmiotu 2015/16 A. Usytuowanie przedmiotu w systemie studiów Poziom kształcenia Studia I stopnia Forma i tryb prowadzenia studiów
Kod przedmiotu TR.NIK408 Nazwa przedmiotu Podstawy budowy maszyn II Wersja przedmiotu 2015/16 A. Usytuowanie przedmiotu w systemie studiów Poziom kształcenia Studia I stopnia Forma i tryb prowadzenia studiów
PL 216311 B1. Sposób kształtowania plastycznego uzębień wewnętrznych kół zębatych metodą walcowania poprzecznego. POLITECHNIKA LUBELSKA, Lublin, PL
 PL 216311 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216311 (13) B1 (21) Numer zgłoszenia: 392273 (51) Int.Cl. B23P 15/14 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 216311 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216311 (13) B1 (21) Numer zgłoszenia: 392273 (51) Int.Cl. B23P 15/14 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej
(57) 1. Zespół wał-piasta z układem uzębień do przenoszenia PL B1 F16D 1/ ,DE, BUP 25/
 1. Zespół wał-piasta z układem uzębień do przenoszenia PL B1 F16D 1/ ,DE, BUP 25/") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (1 9 ) PL (11) 186012 (21 ) Numer zgłoszenia: 326543 (22) Data zgłoszenia: 2 8.05.1998 (1 3 ) B1 (51) IntCl7 F16D 1/06
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej (12) OPIS PATENTOWY (1 9 ) PL (11) 186012 (21 ) Numer zgłoszenia: 326543 (22) Data zgłoszenia: 2 8.05.1998 (1 3 ) B1 (51) IntCl7 F16D 1/06
METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH
 METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH Dariusz OSTROWSKI 1, Tadeusz MARCINIAK 1 1. WSTĘP Dokładność przeniesienia ruchu obrotowego w precyzyjnych przekładaniach ślimakowych zwanych
METODA POMIARU DOKŁADNOŚCI KINEMATYCZNEJ PRZEKŁADNI ŚLIMAKOWYCH Dariusz OSTROWSKI 1, Tadeusz MARCINIAK 1 1. WSTĘP Dokładność przeniesienia ruchu obrotowego w precyzyjnych przekładaniach ślimakowych zwanych
Podstawowe pojęcia geometryczne
 PLANIMETRIA Podstawowe pojęcia geometryczne Geometria (słowo to pochodzi z języka greckiego i oznacza mierzenie ziemi) jest jednym z działów matematyki, którego przedmiotem jest badanie figur geometrycznych
PLANIMETRIA Podstawowe pojęcia geometryczne Geometria (słowo to pochodzi z języka greckiego i oznacza mierzenie ziemi) jest jednym z działów matematyki, którego przedmiotem jest badanie figur geometrycznych
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 03/14. ZBIGNIEW PATER, Turka, PL JANUSZ TOMCZAK, Lublin, PL
 PL 221649 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221649 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 400061 (22) Data zgłoszenia: 20.07.2012 (51) Int.Cl.
PL 221649 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221649 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 400061 (22) Data zgłoszenia: 20.07.2012 (51) Int.Cl.
Reduktor 2-stopniowy, walcowy.
 Reduktor 2-stopniowy, walcowy. 1. Dane wejściowe Projektowana przekładnia należy do grupy reduktorów walcowych. Funkcję sprzęgła pełni przekładnia pasowa na wejściu, która charakteryzuje się pewną elastycznością
Reduktor 2-stopniowy, walcowy. 1. Dane wejściowe Projektowana przekładnia należy do grupy reduktorów walcowych. Funkcję sprzęgła pełni przekładnia pasowa na wejściu, która charakteryzuje się pewną elastycznością
MECHANIKA 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
MECHANIKA 2 Prowadzący: dr Krzysztof Polko PLAN WYKŁADÓW 1. Podstawy kinematyki 2. Ruch postępowy i obrotowy bryły 3. Ruch płaski bryły 4. Ruch złożony i ruch względny 5. Ruch kulisty i ruch ogólny bryły
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do projektowania część 3 Zespół napędu liniowego Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 08 Spis treści. Wyznaczenie liczby
Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do projektowania część 3 Zespół napędu liniowego Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 08 Spis treści. Wyznaczenie liczby
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 229123 (13) B1 (21) Numer zgłoszenia: 411048 (51) Int.Cl. F16H 3/06 (2006.01) F16H 1/16 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Listwy zębate / Koła modułowe / Koła stożkowe
 Strona Listwy zębate.2 Koła modułowe z piastą.4 Koła modułowe bez piasty. Koła stożkowe. z uzębieniem prostym Koła stożkowe. z uzębieniem łukowym Koła modułowe.34 i listwy zębate specjalne czesci.maszyn@haberkorn.pl
Strona Listwy zębate.2 Koła modułowe z piastą.4 Koła modułowe bez piasty. Koła stożkowe. z uzębieniem prostym Koła stożkowe. z uzębieniem łukowym Koła modułowe.34 i listwy zębate specjalne czesci.maszyn@haberkorn.pl
(13) B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL
 B1 PL B1. fig. 1 F16H 15/48 F16H 1/32. (54) Przekładnia obiegowa BUP 19/94 Szulc Henryk, Gdańsk, PL") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 169782 (13) B1 (21)Numer zgłoszenia: 298005 Urząd Patentowy (22) Data zgłoszenia: 05.03.1993 Rzeczypospolitej Polskiej (51) Int.Cl.6: F16H 1/32 F16H
Projektowanie Systemów Elektromechanicznych. Wykład 3 Przekładnie
 Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
...J. CD "f"'" POLITECHNIKA LUBELSKA, Lublin, PL BUP 06/12. ZBIGNIEW PATER, Turka, PL JANUSZ TOMCZAK, Lublin, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216309 (13) 81 (21) Numer zgłoszenia 392276 (51) Int.CI B23P 15114 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 216309 (13) 81 (21) Numer zgłoszenia 392276 (51) Int.CI B23P 15114 (2006.01) B21D 53/28 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN
 POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN BADANIE ŚLADÓW DOLEGANIA ZĘBÓW NA PRZYKŁADZIE PRZEKŁADNI HIPOIDALNEJ ĆWICZENIE LABORATORYJNE NR 4 Z PODSTAW KONSTRUKCJI
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY KATEDRA KONSTRUKCJI I EKSPLOATACJI MASZYN BADANIE ŚLADÓW DOLEGANIA ZĘBÓW NA PRZYKŁADZIE PRZEKŁADNI HIPOIDALNEJ ĆWICZENIE LABORATORYJNE NR 4 Z PODSTAW KONSTRUKCJI
Z poprzedniego wykładu:
 Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Z poprzedniego wykładu: Człon: Ciało stałe posiadające możliwość poruszania się względem innych członów Para kinematyczna: klasy I, II, III, IV i V (względem liczby stopni swobody) Niższe i wyższe pary
Wyższa Szkoła Gospodarki
 Zjazd 1 WZÓR OPSU TECZKI ĆWICZENIOWEJ Wyższa Szkoła Gospodarki Wydział Techniczny kierunek: Mechatronika Laboratorium z rysunku technicznego Semestr I, grupa L1 (L2) Imię i Nazwisko Tematyka ćwiczeń do
Zjazd 1 WZÓR OPSU TECZKI ĆWICZENIOWEJ Wyższa Szkoła Gospodarki Wydział Techniczny kierunek: Mechatronika Laboratorium z rysunku technicznego Semestr I, grupa L1 (L2) Imię i Nazwisko Tematyka ćwiczeń do
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 14/14. ZBIGNIEW PATER, Turka, PL JANUSZ TOMCZAK, Lublin, PL
 PL 221662 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221662 (13) B1 (21) Numer zgłoszenia: 402213 (51) Int.Cl. B21B 19/06 (2006.01) B21C 37/20 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 221662 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221662 (13) B1 (21) Numer zgłoszenia: 402213 (51) Int.Cl. B21B 19/06 (2006.01) B21C 37/20 (2006.01) Urząd Patentowy Rzeczypospolitej
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy
 Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
SMAROWANIE PRZEKŁADNI
 SMAROWANIE PRZEKŁADNI Dla zmniejszenia strat energii i oporów ruchu, ale również i zmniejszenia intensywności zużycia ściernego powierzchni trących, zabezpieczenia od zatarcia, korozji oraz lepszego odprowadzania
SMAROWANIE PRZEKŁADNI Dla zmniejszenia strat energii i oporów ruchu, ale również i zmniejszenia intensywności zużycia ściernego powierzchni trących, zabezpieczenia od zatarcia, korozji oraz lepszego odprowadzania
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
RZECZPOSPOLITAPOLSKA(12) OPIS PATENTOWY (19) PL (11) (13) B2
 OPIS PATENTOWY (19) PL (11) (13) B2") RZECZPOSPOLITAPOLSKA(12) OPIS PATENTOWY (19) PL (11) 161647 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 285386 22) Data zgłoszenia: 24.05.1990 51) IntCl5: B23Q 7/02 Tarcza
RZECZPOSPOLITAPOLSKA(12) OPIS PATENTOWY (19) PL (11) 161647 (13) B2 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 285386 22) Data zgłoszenia: 24.05.1990 51) IntCl5: B23Q 7/02 Tarcza
Wspomagane komputerowo projektowanie przekładni zębatej o krzywej tocznej zawierającej krzywe przejściowe
 DOMAŃSKI Janusz 1 BAJKOWSKI Marcin 2 Wspomagane komputerowo projektowanie przekładni zębatej o krzywej tocznej zawierającej krzywe przejściowe WSTĘP Przekładnie zębate podczas pracy podlegają różnego rodzaju
DOMAŃSKI Janusz 1 BAJKOWSKI Marcin 2 Wspomagane komputerowo projektowanie przekładni zębatej o krzywej tocznej zawierającej krzywe przejściowe WSTĘP Przekładnie zębate podczas pracy podlegają różnego rodzaju
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn I
 modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia. Podstawy konstrukcji maszyn I") Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn I Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 4 43-0_ Rok: II Semestr:
Karta (sylabus) modułu/przedmiotu Mechanika i Budowa Maszyn Studia pierwszego stopnia Przedmiot: Podstawy konstrukcji maszyn I Rodzaj przedmiotu: obowiązkowy Kod przedmiotu: MBM S 0 4 43-0_ Rok: II Semestr:
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
PL B1. Przedsiębiorstwo Produkcyjno-Remontowe Energetyki ENERGOSERWIS S.A.,Lubliniec,PL BUP 02/06
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 201011 (13) B1 (21) Numer zgłoszenia: 369048 (51) Int.Cl. B65G 23/06 (2006.01) E21F 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 201011 (13) B1 (21) Numer zgłoszenia: 369048 (51) Int.Cl. B65G 23/06 (2006.01) E21F 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Politechnika Poznańska Instytut Technologii Mechanicznej. Programowanie obrabiarek CNC. Nr 2. Obróbka z wykorzystaniem kompensacji promienia narzędzia
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2015-03-05
1 Politechnika Poznańska Instytut Technologii Mechanicznej Programowanie obrabiarek CNC Nr 2 Obróbka z wykorzystaniem kompensacji promienia narzędzia Opracował: Dr inż. Wojciech Ptaszyński Poznań, 2015-03-05
WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA KOŁA NA ZMIANĘ SZTYWNOŚCI ZAZĘBIENIA
 ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Tomasz FIGLUS, Piotr FOLĘGA, Piotr CZECH, Grzegorz WOJNAR WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA
ZESZYTY NAUKOWE POLITECHNIKI ŚLĄSKIEJ 2009 Seria: TRANSPORT z. 65 Nr kol. 1807 Tomasz FIGLUS, Piotr FOLĘGA, Piotr CZECH, Grzegorz WOJNAR WYKORZYSTANIE MES DO WYZNACZANIA WPŁYWU PĘKNIĘCIA W STOPIE ZĘBA
Chropowatości powierzchni
 Chropowatość powierzchni Chropowatość lub chropowatość powierzchni cecha powierzchni ciała stałego, oznacza rozpoznawalne optyczne lub wyczuwalne mechanicznie nierówności powierzchni, niewynikające z jej
Chropowatość powierzchni Chropowatość lub chropowatość powierzchni cecha powierzchni ciała stałego, oznacza rozpoznawalne optyczne lub wyczuwalne mechanicznie nierówności powierzchni, niewynikające z jej
Nacinanie walcowych kół zębatych na frezarce obwiedniowej
 POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inŝ. Krzysztof Netter www.netter.strefa.pl
POLITECHNIKA POZNAŃSKA Instytut Technologii Mechanicznej Maszyny technologiczne laboratorium Nacinanie walcowych kół zębatych na frezarce obwiedniowej Opracował: dr inŝ. Krzysztof Netter www.netter.strefa.pl
Materiały pomocnicze do rysunku wał maszynowy na podstawie L. Kurmaz, O. Kurmaz: PROJEKTOWANIE WĘZŁÓW I CZĘŚCI MASZYN, 2011
 Materiały pomocnicze do rysunku wał maszynowy na podstawie L. Kurmaz, O. Kurmaz: PROJEKTOWANIE WĘZŁÓW I CZĘŚCI MASZYN, 2011 1. Pasowania i pola tolerancji 1.1 Łożysk tocznych 1 1.2 Kół zębatych: a) zwykłe:
Materiały pomocnicze do rysunku wał maszynowy na podstawie L. Kurmaz, O. Kurmaz: PROJEKTOWANIE WĘZŁÓW I CZĘŚCI MASZYN, 2011 1. Pasowania i pola tolerancji 1.1 Łożysk tocznych 1 1.2 Kół zębatych: a) zwykłe:
Rozróżnia proste przypadki obciążeń elementów konstrukcyjnych
 roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
roces projektowania części maszyn Wpisany przez iotr ustelny Moduł: roces projektowania części maszyn Typ szkoły: Technikum Jednostka modułowa C rojektowanie połączeń rozłącznych i nierozłącznych Zna ogólne
PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ
 KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU ol. 7 nr Archiwum Technologii Maszyn i Automatyzacji 007 LESZEK SKOCZYLAS PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ W artykule przedstawiono sposób
KOMISJA BUDOWY MASZYN PAN ODDZIAŁ W POZNANIU ol. 7 nr Archiwum Technologii Maszyn i Automatyzacji 007 LESZEK SKOCZYLAS PRĘDKOŚĆ POŚLIZGU W ZAZĘBIENIU PRZEKŁADNI ŚLIMAKOWEJ W artykule przedstawiono sposób