PRAKTYCZNE ZASTOSOWANIE ELEMEN TÓW ANALIZY M OD ALN EJ DO DYNAMICZNYCH BADAŃ OBRABIAREK. 1. Wprowadzenie
|
|
|
- Lech Rutkowski
- 9 lat temu
- Przeglądów:
Transkrypt
1 MECHANIKA TEORETYCZNA I STOSOWANA 3, 26 (1988) PRAKTYCZNE ZASTOSOWANIE ELEMEN TÓW ANALIZY M OD ALN EJ DO DYNAMICZNYCH BADAŃ OBRABIAREK WŁADYSŁAW LISEWSKI PAWEŁ GUTOWSKI Politechnika Szczeciń ska 1. Wprowadzenie Właś ciwoś i c dynamiczne ukł adów liniowych, a wię c również i obrabiarek moż na opisać przez zbiór funkcji przejś cia lub przez czę stoś i cwłasne i odpowiadają ce im postacie drgań [1]. W ostatnim okresie obserwuje się szczególne zainteresowanie tą drugą formą opisu [2]. Wynika to niewą tpliwie z faktu, że obraz postaci drgań zawiera czę sto bardziej czytelne informacje o właś ciwoś ciac h dynamicznych badanej obrabiarki. Z wizualnej analizy zachowania się obrabiarki lub poszczególnych jej zespołów przy czę stoś ciach rezonansowych doś wiadczony badacz może wycią gnąć wnioski potrzebne konstruktorowi [3]. Metoda ta winna być wię c szczególnie przydatna, gdy celem badań jest uzyskanie informacji o tym jak należy przekonstruować obrabiarkę, by uzyskać lepsze jej wł aś ciwośi c ze wzglę du na przyję te kryterium. Intuicyjne dotychczas propozycje zmian konstrukcyjnych obrabiarki, w przypadku analizy modalnej mogą być wynikiem przeprowadzonych obliczeń modelowych (przynajmniej w sensie jakoś ciowym) [4]. 2. Zasady budowy modelu badawczego obrabiarki Okreś lenie postaci drgań obrabiarki w oparciu o badania doś wiadczalne wią że się z koniecznoś ci ą ustawienia na niej duż ej liczby czujników. Dokładność odtworzenia drgań obrabiarki drgają cej z okreś loną czę stoś ci ą wynika z liczby zastosowanych do pomiaru czujników oraz złoż onośi cpostaci drgań odpowiadają cej badanej czę stoś ci. Przykł adowo, do badania postaci drgań tokarki autorzy pracy [4] zastosowali 16 czujników. Nie zawsze oś rodki badawcze zajmują ce się tą problematyką dysponują aparaturą umoż liwiają ąc prowadzenie pomiarów tak duż ej liczby sygnałów równocześ nie. Przedstawiona w tym opracowaniu analiza modalna jest pewną modyfikacją metod przedstawionych w literaturze [2, 4, 1]. Bazuje ona n a zał oż eniach metody sztywnych
![[1]. W ostatnim okresie obserwuje się szczególne zainteresowanie tą drugą formą opisu [2].](/docs-images/53/14014556/images/page_1.jpg "Wynika to niewą tpliwie z faktu, że obraz postaci drgań zawiera czę sto bardziej czytelne informacje o właś ciwoś ciac h dynamicznych badanej obrabiarki.")
2 488 W. LlSEWSKI, P. GUTOWSKI Rys. 1. Model badawczy obrabiarki podział na sztywne elementy skoń czone elementów skoń czonych (SES) [5]. Badany ukł ad mechaniczny traktuje się jak zespół sztywnych brył poł ą czonych elementami sprę ż ysto- tł umią cym i (EST). Podział badanego układu na bryły sztywne odbywa się na ogół w sposób naturalny tzn. w płaszczyznach styku poszczególnych jego elementów (np. płaszczyzny prowadnic, poł ą czeń itp.) Moż liwe są też podział y elementów jednolitych w sposób sztuczny. Przykł adowy model badawczy obrabiarki przedstawiono na rys. 1. Poza podział ami naturalnymi, stół i stojak frezarki podzielono dodatkowo w sposób sztuczny- umowny. Dzię ki tak przyję temu modelowi obrabiarki w badaniach doś wiadczalnych uzyskuje się moż liwość rozważ ania zarówno analitycznego jak i doś wiadczalnego modelu badanego obiektu we wspólnej przestrzeni metrycznej [6]. Wył ania się wię c moż liwość jednoznacznego porównania sygnałów z obu modeli co ma istotne znaczenie np. w procesie identyfikacji parametrów modelu analitycznego w oparciu o wyniki badań doś wiadczalnych. Wprowadzenie zał oż eń metody SES pozwala ponadto zminimalizować liczbę czujników niezbę dnych do jednoznacznego okreś lenia ruchu elementów obrabiarki, oraz rozdzielić jego skł adowe translacyjne i rotacyjne. W przypadku badania tak zł oż onych obiektów jak obrabiarka, problem ustalenia najmniejszej niezbę dnej liczby czujników jest waż ny ze wzglę du na czas badań, oraz ilość zdobywanych i dalej przetwarzanych informacji. Moż liwość rozdzielenia translacyjnych i rotacyjnych postaci drgań uł atwia wnioskowanie konstruktora o przyczynach wystę powania w obrabiarkach niekorzystnych zjawisk z dynamicznego punktu widzenia. Lepsza w zwią zku z tym powinna być efektywność wprowadzanych przez niego zmian konstrukcyjnych. 3. Pomiar parametrów przestrzennego ruchu bryły sztywnej Każ da bryła sztywna w przestrzeni R 3 może mieć sześć stopni swobody. Jej ruch w dowolnym nieruchomym ukł adzie współ rzę dnych opisują trzy translacyjne i trzy rotacyjne współ rzę dne uogólnione. Przedstawić je moż na w postaci wektora (macierzy kolumnowej): q^o^colte^)}; a = 1,2,...,6, (1) gdzie: q ia (t) współrzę dna uogólniona sztywnego elementu oznaczonego numerem i.
 Moż liwe są też podział y elementów jednolitych w sposób sztuczny. Przykł adowy model badawczy obrabiarki przedstawiono na rys. 1.")
3 ANALIZA MODALNA- OBRABIAREK 489 Pomiar ruchu dowolnego elementu obrabiarki traktowanego jak sztywny moż liwy jest przy uż yciu czujników przyś pieszeń (sejsmicznych) odpowiednio na nim rozmieszczonych. Każ dy czujnik zamocowany na bryle sztywnej wykonują cej drgania mierzy jej przyś pieszenie w punkcie pokrywają cym się ze ś rodkiem cię ż kośi cmasy sejsmicznej czujnika. Równanie opisują ce to przyś pieszenie ma postać: x [ai(t)xr A ], (2) gdzie: p A (t) wektor przyś pieszenia punktu A, Po(t) wektor przyś pieszenia punktu (począ tku ukł adu współ rzę dnych), e( wektor przyś pieszenia ką towego, <a(t) - wektor prę dkośi c ką towej, r A wektor- promień łą czą cy punkt z punktem A. Jak wynika z pracy [7] przy ką tach obrotu ciała nie wię kszych od 1 przyś pieszenie doś rodkowe stanowi mniej niż 1% stycznego i może być pominię te. Ponadto w przypadku małych drgań okreś lenie ruchu bryły sztywnej moż liwe jest zarówno przez pomiar przyś pieszeń, prę dkoś i cjak i przemieszczeń [4] tzn., że proces cał kowania moż na realizować zarówno w odniesieniu do bezpoś rednio mierzonych sygnał ów jak i wyznaczonych z równania (2) przyś pieszeń. Wobec powyż szego w prezentowanej pracy dalsze rozważ ania prowadzone bę dą na przemieszczeniach. Rys. 2. Skł adowe przemieszczeń SES w ukł adzie współ rzę dnych Przemieszczenie punktu A bryły sztywnej (rys. 2) mierzone przez trzy czujniki ustawione ortogonalnie do siebie i równoległe do osi przyję tego ukł adu współrzę dnych opisuje równanie macierzowe [5]: 6 Mech. Teoret. i Stos. 3/ S8 qx- R- qo, (3)
![Równanie opisują ce to przyś pieszenie ma postać: x [ai(t)xr A ], (2) gdzie: p A (t) wektor przyś pieszenia punktu A, Po(t) wektor przyś pieszenia punktu (począ tku ukł adu współ rzę dnych), e(](/docs-images/53/14014556/images/page_3.jpg "wektor przyś pieszenia ką towego, <a(t) - wektor prę dkośi c ką towej, r A wektor- promień łą czą cy punkt z punktem A.")
4 49 W. LlSEWSKI, P. GUTOWSKI gdzie: ą A macierz kolumnowa zawierają ca współ rzę dne przemieszczenia punktu A bryły sztywnej, ą A = col{q 1A (t), q ZA {t), ^(OK R macierz transformacji współ rzę dnyc h uogólnionych ruchu brył y sztywnej z punktu O do punktu A, 1 r 3A - r 2A 1 - r 3A r 1A 1 r 2A - r la. r ia współ rzę dne wektora okreś lają ceg o poł oż eni e punktu A wzglę dem, q współ rzę dne uogólnione ruchu brył y sztywnej okreś lone w punkcie, q = col{?io(» -.?6o(>. Aby na podstawie pomiarów wyznaczyć przemieszczenia uogólnione q należy także w innych, punktach brył y sztywnej umieś cić czujniki. Ł ą czna ich liczba nie może być mniejsza od sześ ciu, a liczba punktów w których je ustawiono nie mniejsza od trzech. Każ dy nastę pny czujnik to dodatkowy wiersz w macierzy R. Przy trzech punktach pomiarowych moż liwe są dwie wersje rozmieszczenia czujników w ukł adzie lub (4) Rys. 3. Ustawienie czujników pomiarowych w ukł adzie W przypadku ukł adu pokazanego na rys. 3 istnieje moż liwość wyznaczenia współrzę dnych uogólnionych q gdy prawdziwa jest koniunkcja: W ogólnym przypadku musi być speł niony warunek: ~V: = > {A,B,C}, L (6)

5 ANALIZA MODALNA OBRABIAREK 491 gdzie: i,j numery współ rzę dnych ukł adu odniesienia, {A, B, C] zbiór punktów w których zamocowano czujniki, L dowolna prosta w przestrzeni K 3. Równanie (6) jest matematycznym zapisem powszechnie znanego warunku by punkty mocowania czujników nie leż ały na jednej prostej. Wymagania dotyczą ce punktów mocowania czujników podczas pomiarów (zależność 5) ograniczają ce się do nierównoś ci okreś lonych współ rzę dnych są bardzo ł atwe do speł nienia. Celowe jest jednak moż liwie wyraź ne róż nicowanie tych współ rzę dnych, by rejestrowane przebiegi przemieszczeń także wyraź nie róż niły się mię dzy sobą. W równaniu (3) obowią zuje założ enie, że układy współrzę dnych zwią zane z punktami A i są do siebie równoległ e. W przypadku nie speł nienia tego zał oż enia, równanie to bę dzie miało postać: q= <9- R*- q, (7) gdzie: q macierz kolumnowa zawierają ca przemieszczenia mierzone przez: wszystkie czujniki zamocowane na drgają cej bryle sztywnej, R* macierz transformacji o wymiarach 6 x6 uwzglę dniają ca współ rzę dne mocowania wszystkich sześ ciu czujników na bryle sztywnej (zbudowana analogicznie do R wzór (4)), macierz kosinusów kierunkowych.. Dla czujników w ukł adzie (rys. 3) ma ona postać: = cos cp Al j. cos 99^ 2 cos 99^13 cos<p A2x co$<p A22 cos(p A23 cos<p cos^31 A32 cos<p A33 cos<p B12 cos<p B22, ką t zawarty mię dzy osią z- tego czujnika w punkcie A oraz >tą osią globalnego układu współrzę dnych. Przy trzech punktach mocowania czujników, wyjś ciowa postać macierzy jest nastę - pują ca: V A B c j gdzie: A, B, C nazwy punktów mocowania czujników, <PB23 cos<p c33 _ coscp A32 Macierz ' ma wymiary 9x9 i poszukiwaną macierz otrzymuje się z niej prziez skreślenie wierszy oraz kolumn opisują cych poł oż enie brakują cych" czujników w poszczegól-

6 492 W. LlSEWSKI, P. GUTOWSKI nych punktach. Przykł adowo wyż ej zapisana macierz kosinusów kierunkowych dla układów czujników z rys. 3 powstała po skreś leniu z macierzy O' wierszy, oraz kolumn opisują cych położ enie czujników q 1B w punkcie B, oraz q ic i q 2 c w punkcie C. Takich czujników po prostu nie ma. Jeś li któryś z elementów badanego urzą dzenia wiruje (np. narzę - dzie w modelu, z rys. 1), pomiar skł adowych jego ruchu przy uż yciu czujników sejsmicznych nie jest moż liwy. Jednakże z powodzeniem zadanie to moż na rozwią zać uż ywając pię ciu czujników indukcyjnych bezdotykowych, oraz czujnika drgań skrę tnych. Sposób k- ty element Rys. 4. Pomiar składowych ruchu wirują cej tarczy; 1-5 czujniki bezdotykowe, 6 czujnik drgań skrę tnych (sejsmiczny) pomiaru pokazano na rys. 4. Macierz R* dla takiego układu pomiarowego przyjmuje postać: ' 1 r 21 - r u 1 r 22 - r 12 1 r 33 - r 23 1 r (8) 24 - r r 3S r gdzie: r ti i- ta współ rzę dna odległoś ci / - tego czujnika od począ tku przyję tego układu współ rzę dnych. Czujniki indukcyjne mierzą ruch w stosunku do bazy, na której zostały zamocowane. Jeś li bazą tą jest są siedni element badanego urzą dzenia, którego ruch mierzony jest czujnikami sejsmicznymi, wówczas wykorzystują c moż liwość transformacji współ rzę dnych uogólnionych, ruch elementu wirują cego w układzie bezwzglę dnym wyznaczyć moż na z zależ nośi c (rys. 4):, gdzie:, IOK macierz zawierają ca skł adowe ruchu wirują cej brył y sztywnej okreś lona w ukł adzie bezwzglę dnym,

7 ANALIZA MODALNA OBRABIAREK 493 qox macierz zawierają ca składowe ruchu wirują cej bryły sztywnej okreś lona wzglę dem elementu bazowego na którym zamocowano czujniki indukcyjne, K K macierz transformacji przemieszczeń bryły (k- \) bę dą cej bazą, do ukł adu współ rzę dnych bryły wirują cej (k), q K-i macierz zawierają ca składowe ruchu bryły (k 1) bę dą cej bazą do mocowania czujników indukcyjnych. Podczas badania obiektów składają cych się z n elementów, które moż na traktować jak sztywne, ukł ad pomiarowy powinien skł adać się z 6«czujników mierzą cych sygnał y wyjś ciowe. W przypadku braku zestawu badawczego o duż ej liczbie torów pomiarowych, przy zał oż eniu o stacjonarnoś ci obiektu, badania moż na prowadzić etapowo przenoszą c czujniki na kolejne brył y. Wówczas wystarczy 6 czujników mierzą cych sygnały wyjś ciowe oraz jeden do pomiaru sygnału wejś ciowego. W badaniach takich operować należy nie sygnałami (przemieszczeniami) lecz zespolonymi funkcjami przejś cia. Odniesienie przemieszczeń zmierzonych w wybranych punktach na obrabiarce do sygnał u wymuszenia rozwią zuje problem przesunię ć - fazowyc h mię dzy sygnałami mierzonymi w kolejnych etapach badań. Równanie (7) w tej sytuacji przyjmuje postać: gdzie: W = K* W 5 (1) n numer czujnika, i numer skł adowej zespolonej funkcji przejś cia, f{ju>) siła wymuszają ca drgania obrabiarki. Po wyznaczeniu funkcji przejś cia W w oparciu o pomiary dla każ dej bryły sztywnej rozwią zanie równania (1) ze wzglę du na W o nie stanowi problemu. W ten sposób otrzymuje się pełną informację o ruchu każ dego elementu badanego urzą dzenia (np. obrabiarki). Informacja ta jest opisana w układzie współrzę dnych zwią zanym z każ dą mierzoną bryłą. Tak wyznaczone funkcje przejś cia mogą być aproksymowane wyraż eniem [1]: gdzie: m t masa rezydualna, F t k, Gtk, S t, R t parametry wielomianu aproksymują cego, Xt+jy t podatność rezydualna, n liczba rezonansów na charakterystyce w rozpatrywanym przedziale '.. czę stotliwoś ic Taka postać charakterystyk wymaga znacznie mniejszych obszarów pamię ci komputera niezbę dnej do zmagazynowania wyników badań, a jednocześ nie stanowi wygodną formę wyjś ciową do estymacji parametrów modelu badanego obiektu [1].

8 494 W. LlSEWSKI, P. GUTOWSKI 4. Transformacja charakterystyk czę stotliwoś ciowych Czytelną informację o właś ciwoś ciac h badanej obrabiarki zawierają graficzne obrazy postaci drgań odpowiadają cych poszczególnym czę stoś ciom rezonansowym. W przypadku prezentowanej metody badawczej dane niezbę dne do uzyskania przejrzystego obrazu postaci drgań otrzymuje się w wyniku transformacji charakterystyk W o do każ dego naroża brył y której ruch one opisują. Problem transformacji charakterystyk do dowolnego punktu badanego obiektu pojawia się także w innych sytuacjach zależ nie od celu badań. Sposób realizacji tego zadania zarówno dla funkcji przejś cia w postaci tablicy jak i w formie aproksymowanej wzorem (12) jest przedmiotem rozważ ań niniejszego rozdział u pracy. Ogólny przypadek transformacji charakterystyk wystę puje wtedy, gdy rozpatrywane ukł ady współ rzę dnych są przesunię te i obrócone wzglę dem siebie. W tym przypadku transformację przeprowadza się niejako dwuetapowo, najpierw do ukł adu Ax'y'z' przesunię tego równolegle o wektor r aa wzglę dem układu wyjś ciowego Oxyz (rys. 5), a nastę p- nie dokonują c obrotu układu Ax'y'z' do Ax 1 y 1 z 1. Y' Rys. 5. Transformacja charakterystyk czę stotliwoś ciowych W z układu Oxyz do układu W układzie Oxyz charakterystyki dynamiczne Wi okreś lone są zależ noś ci ą (11). Dla ukł adów przestrzennych siły uogólnione/ ( tworzą wektor f o sześ ciu składowych, z których trzy pierwsze są siłami P działają cymi wzdłuż osi układu, zaś pozostałe trzy momentami M wzglę dem tych osi.

9 ANALIZA MODALNA OBRABIAREK 495 Redukcja sił y f do ukł adu Ax'y'z' okreś lona jest zależ noś ą ci [5]: f x - V«- f f (13) gdzie: T f macierz współ czynników redukcji sił, zaś transformacja przemieszczeń z punktu ukł adu Oxyz do punktu A ukł adu Ax'y'z' wyraża się zależ noś cią : q^ = T - q, (14) gdzie: q macierz przemieszczeń uogólnionych w punkcie, T macierz transformacji przemieszczeń. Charakterystykę dynamiczną w punkcie A ukł adu Ox'y'z' \\ do Oxyz okreś lić więc moż na zależ noś cią : " M f > jai zaś zwią zek mię dzy charakterystykami W i W^ równaniem: (15) W; = T- W, (16) gdzie T jest poszukiwaną macierzą redukcji do ukł adów równoległ ych. Elementy T tj macierzy T wyznaczyć moż na z równania (16) po jego rozpisaniu w postaci jawnej i podstawieniu wartoś ci W t i W' Ai wyznaczonych, z zależ nośi c geometrycznych okreś lonych na podstawie rys. 4. W rezultacie otrzymuje się: gdzie: 1 T 15 T - l6 1 T 24 T 26 T = 1 T 34 T 35 T 44 (17) T s5 _ T 66 _ Cu_ d]a «- 1,2, 3, CłJ fc ~ 4) Dj Oj (18) oraz: c k Ci = (2) dla k = 4, 5, 6, (19) V V 7 A BA X BA C'BA kf ( cos95, n = k 3 (21) COSC> nl COSC) 2 COSC) n Pt p 2 p 3 XBO - 'BO 2^BO (22) COSC9 nl COSCP n2
 W; = T- W, (16) gdzie")
10 496 W. LlSEWSKI, P. GuTOWSKt W drugim etapie dokonuje się transformacji charakterystyk W^ do układu Ax i y l z i obróconego wzglę dem Ax'y'z' o ką t okreś lony macierzą kosinusów kierunkowych ij'. COS7? 12 Jj' = CSł1 2 l C OS?^22 C Sł?23. (23^ os^31 cos^32 cosrj 33 W rezultacie otrzymuje się ogólny wzór na transformację charakterystyk W z układu Oxyz do przesunię tego równolegle i obróconego wzglę dem niego ukł adu Ax- ^y^z^. Wzór ten ma postać: W^- 9- T.W, (24) gdzie: n = zaś macierz T okreś lona jest równaniem (17) Transformacja charakterystyk aproksymowanych do dowolnego punktu bryły sztywnej. Jak wykazano w pracy [1], charakterystyki dynamiczne wyznaczone doś wiadczalnie w okreś lonym przedziale czę stotliwoś i c (co A, w B ) w punkcie t dowolnego układu posiadają cego n sprzę ż onych stopni swobody moż na aproksymowac wielomianem o postaci opisanej zależ noś ą ci (12). Transformacja charakterystyk dynamicznych opisanych wielomianem aproksymacyjnym nie zmienia postaci wielomianu, lecz powoduje zmianę współ czynników aproksymacji, przy czym zmianie ulegają parametry m t, x t, y, F tk i G tk, gdyż są one funkcją poł oż enia punktu, w którym zdejmowano charakterystykę, natomiast parametry S k i R k nie ulegają zmianie, gdyż charakteryzują one wł asnoś ci ukł adu niezależ nie od miejsca zdejmowania charakterystyki. Transformację charakterystyk aproksymowanych 1 przeprowadza się korzystają c z zależ nośi c(24), która w tym przypadku przyjmie postać: W r = T r - W,.. (26) gdzie: T r = if T macierz redukcji, W macierz charakterystyk opisanych równaniem (12), W r macierz charakterystyk zredukowanych z układu Oxyz do ukł adu Ax 1 y 1 z l, natomiast parametry m\, x r t, y\, F t rk, G r tk wielomianu W przetransformowanego z układu Oxyz do układu Ax^y^z^, znajduje się z układu równań powstają cych po zapisaniu równania macierzowego (26) w formie rozwinię tej i po porównaniu w otrzymanych równaniach składników o tej samej postaci. Równanie (26) w formie rozwinię tej ma postać: (25) wr x 11 Jl2 J 16 (26a) _r 61 r n 6 przy czym dla i = 4, 5, 6 i j = 1, 2, 3 T u =.
 gdzie: n = zaś macierz T okreś lona jest równaniem (17). 4.1. Transformacja charakterystyk aproksymowanych do dowolnego punktu bryły sztywnej.")
11 ANALIZA MODALNA OBRABIAREK 497 Pierwsze z tych. równań to: Wi = T[ j W t + T\ 2 W 2 + T[ 3 W 3 + TU W 4 + TU W s + TU W 6. (27) Podstawiając zamiast W } i W] wyraż enie (12) otrzymuje się: n 1 \ H F W wyniku porównania w równaniu (28) odpowiednich skł adników otrzymuje się: 6 (3) i- u=j]t[jy JO, (31) k = 1... n, (32) fr- l...». (33) W sposób analogiczny z dalszych 5- ciu równań wynikają cych z równania (26a) wyznacza się pozostał e parametry charakterystyk przetransformowanych. Parametry te wraz z parametrami opisanymi równaniami (29- ^33) moż na przedstawić w nastę pująy c sposób: a) dla z = 1, 2, 3; b) dla i = 4, 5, 6, k» 1, 2,,.., n fc= l,2,...,n (34) 7= 1 7= y>i = x x i Tijyj, yi = ^ ^oxf v^"j 7=1 7= 4 ' 6. '. 6 '.. :. ; ;'. ' ',.. C 1 "» TT U* ET.\ TT T? rtk ~ J/ J llirjki flk ^ij^jkt 7-1 7=4
 moż na przedstawić w nastę pująy c sposób: a) dla z = 1, 2, 3; b) dla i = 4, 5, 6, k» 1, 2,,.., n fc= l,2,.")
12 498 W. LISEWSKI, P. GOTOWSKI 6 6 Gh = ]? T[jG Jk, G\ k = T[jG Jk. (38) Z przedstawionych rozważ ań wynika, że transformacja charakterystyk aproksymowanych jest bardzo prosta. Moż na więc bezpoś rednio po zdję ciu charakterystyk dynamicznych badanego obiektu przeprowadzić ich aproksymację, a wszystkie dalsze operacje zwią zane z przetwarzaniem tych charakterystyk prowadzić nie na tablicach lecz na wielomianach. 5. Wyniki badań doś wiadczalnych Wykorzystując metodę zaprezentowaną w pracy [1], oraz powyż sze rozważ ania przeprowadzono badania doś wiadczalne kilku obrabiarek. Podczas badań starano się symulować okreś lone warunki pracy obrabiarki. W zwią zku z tym mię dzy narzę dziem i przedmiotem obrabianym instalowano sił ownik hydrauliczny lub sprę ż ynowy. Kierunek oraz wartość sił y wywoł anej w ten sposób odpowiadał y stał ej skł adowej sił y skrawania symulowanego procesu obróbki. Skł adową zmienną generowano przy uż yciu impulsatora. Parametry impulsu dobierano stosownie do wł asnośi c badanej obrabiarki, oraz zakresu czę stotliwoś, ciw którym należ ało wyznaczyć charakterystyki [Ił ]. Przykł adowe charakterystyki czę stotliwoś ciowe wyznaczone podczas badań jednej z obrabiarek przedstawiono na rys. 6. Są to charakterystyki otrzymane w wyniku pomiaru sygnał ów odpowiedzi przez sześć czujników ustawionych w ukł adzie (rys. 3). Obok każ dego z wykresów zamieszczono w tablicy wartoś ci parametrów opisują cych charakterystyki aproksymują ce. Wyestymowane na podstawie tych charakterystyk parametry R i S zestawiono poniż ej : _ "-.284E E+ 5] I i E E+ 5J P _ E E E E+ 3J Zagadnienie interpretacji tych wyników, zwią zanie ich z adekwatnym modelem w sensie jego struktury, to odrę bny problem, który jest przedmiotem aktualnie prowadzonych przez autorów prac. * We wcześ niejszej pracy [1] pokazano proces aproksymacji w odniesieniu do charakterystyk wyznaczonych analitycznie. Interesują ca jest odpowiedź na pytanie dotyczą ce szybkoś ci zbież nośi c procesu iteracyjnego w przypadku opisu charakterystyk wyznaczonych doś wiadczalnie. Przykł ad pokazują cy dokł adność dopasowania charakterystyki aproksymowanej pokazano na rys. 7. W omawianym przypadku pokazano kilka faz zbliż ania się do rozwią zania zadowalają cego. Okazuje się, że uzyskanie dobrej zgodnoś ci obu wykresów wymaga wielu iteracji. Czas obliczeń jest jednak na tyle krótki, że nie stanowi to istotnego problemu.

13 r 1 2 h "or 1r.974 E E-1.152E*3.272E-3 x 1 =.36 E-6 y o1 =.946E-7 U 1r - >997E-5.997E-5 S 1r.93E+4.234E+-5 R 1r 393E*1.115E+2 xe 1» 27^ 2Z czę stotliwość, Hz ' charakterystyko doś wiadczalna charakterystyka aproksytnowana r 1 2 CO or 974E*2.152 *3 hr.357e-2.12e-2 ^2r -.13E- 4.13E-4 b 2r R 2r.947E*4.3E+1.227E*5.997E+1 = -.25E czę stotliwoś, ćhz r 1 2» or F H 3r S3r 3r 974E» E-2.215E EH,152E* E E-6 239Ef9.92E+1 x o3 = E-6 y o ' 3 ;.434 E ' czę stotliwoś, ćhz [499]

14 d) li a i/i o o / r 1 2 CO or.974e»2.152e*3-118e E-2 K W «- k»e-b nt, -.252E- G 4r -.736E-6.736E-5 S 4r.953E<-4.242E+5 ^4r.278E+1.S17E+1 6- e) 1 *- xe -6 ^ ^ 18' 2,, 22 1 czę stotliwość, Hz J CS 6- o a 2- r Et2.152E+3 f- 5r.34E-2.115E-3 hr - 763E E-5 S 5r.919E+4.2A9E*-5 R5r.282E^1.123E+2 1 W 2 czę stotliwoś ć, Hz r 1 2 "or.974 Et2 -.44GE-2 ;152Et3 :27E-2 hr - 642E-5.642E-5.954E*4.241E+5 hr.297e*1.18e+2 x oe =- 999 E-G y OG =.258E-6 =-.855E-1 m 6 1' 12' 14 18' 2' "22 czę stotliwoś ć, Hz Rys. 6. Przykładowe charakterystyki amplitudowo- czę stotliwoś ciow e wyznaczone na stole jednej z badanych obrabiarek [5]

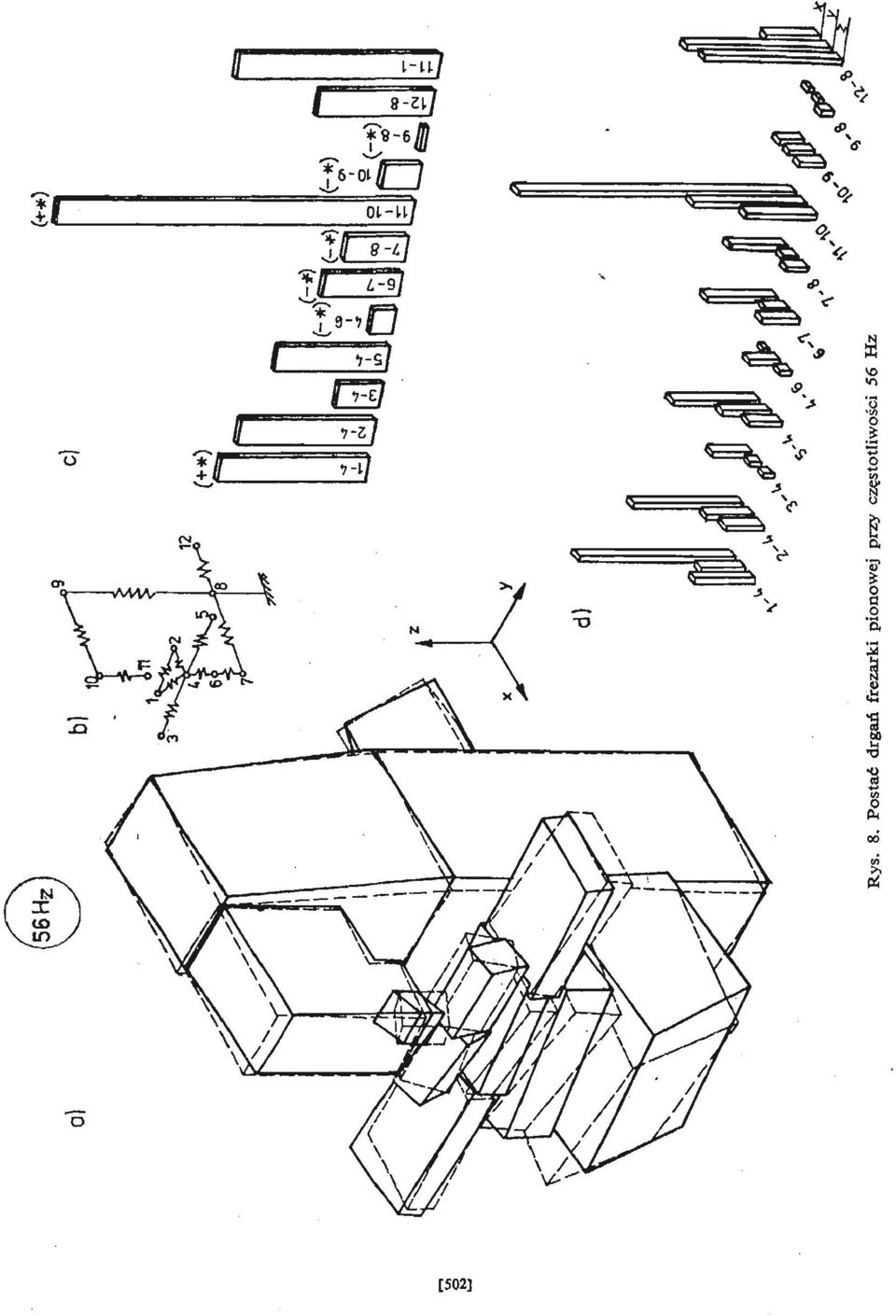
15 ANALIZA MODALNA OBRABIAREK 51 ukfad rzeezywisly 5 kroków ileracyjnych 1 kroków iteracyjnych 2 kroków iteracyjnych 25kroków iteracyjnych Re, mm/ dan Rys. 7. Charakterystyki aproksymują ce po kolejnych krokach iteracyjnych (charakterystyka z rys. 6c) Jednym z waż niejszych celów prezentowanej pracy jest badanie postaci drgań obrabiarek. Zgodnie wię c z zał oż eniami metody zbudowano model obrabiarki (rys. 1) i dla przyję tego wariantu jej pracy (przypadku skrawania stwarzają cego okreś lony stan obcią - ż enia obrabiarki) wykonano pomiary [H» 12]. Na każ dej z umownie sztywnych, brył instalowano po 6 czujników sejsmicznych (jak na rys. 3) i wyznaczano charakterystyki czę stotliwoś ciowe. W ramach niniejszej pracy dla zilustrowania wyników przedstawiono dwie postacie drgań (56 Hz rys. 8 i 376 Hz rys. 9) jednej z wielu przebadanych frezarek pionowych. Zachowanie się obrabiarki podczas drgań przy tych czę stotliwoś ciach moż na ocenić w oparciu o obraz przedstawiony w lewej czę śi comawianych rysunków. Są to w odpowiednim powię kszeniu dwie skrajne fazy ruchu badanej obrabiarki. Obraz taki rysowany jest przez komputer [8] na podstawie wyznaczonych doś wiadczalnie charakterystyk oraz danych geometrycznych obrabiarki. Swoboda wyboru poł oż enia obserwatora wzglę dem drgają cej obrabiarki stwarza moż liwość oglą dania jej z wielu stron. Ten płaski obraz może stać się wię c bardziej plastyczny i informacja o ruchu obiektu peł niejsza. Istotnym uzupeł nieniem prezentacji wyników badań jest moż liwość wygenerowania wielu obrazów drgają cej obrabiarki, bę dą cych kolejnymi fazami jej ruchu. Podanie kolejnych obrazów w odpowiednim tempie na monitor komputera pozwala uzyskać ruchomy obraz drgają cej obrabiarki. Postacie drgań ukł adów tł umionych opisują liczby zespolone. Rzeczywiste zachowanie się obrabiarki w takiej sytuacji poprawniej może pokazać wł aś nie ruchomy jej obraz. Taka analiza pozwala na jakoś ciową ocenę badanego obiektu. Do oceny iloś ciowej potrzeb-
 i dla przyję tego wariantu jej pracy (przypadku skrawania stwarzają cego okreś lony stan obcią - ż enia obrabiarki) wykonano pomiary [H» 12].")
16
17

18 54 W. LisEWSKr, P. GUTOWSKI na jest informacja o udział ach poszczególnych zespołów obrabiarki (w tym przypadku brył traktowanych jak sztywne) w drganiach wzglę dnych mię dzy narzę dziem i przedmiotem obrabianym- Przyję ty model pomiarowy oraz wynikają ca stą d moż liwość transformowania przemieszczeń zadanie to czynią realnym. Na rys. 8b przedstawiony jest schematycznie ukł ad obrabiarki, na którym widać ł ań cuch brył obejmują cych" proces skrawania. Są to brył y: 1 lub 2, 4, 6, 7, 8, 9,1 i 11. Wszystkie one mają wpływ na przemieszczenia narzę dzia wzglę dem przedmiotu obrabianego. Na podstawie przeprowadzonych pomiarów bezwzglę dnych drgań wszystkich elementów przyję tego modelu obrabiarki (rys. 1), moż na wyznaczyć drgania wzglę dne wystę pują ce mię dzy stykają cymi - się brył ami. Miarą wielkoś ci amplitud drgań wystę pują cych mię dzy narzę dziem i przedmiotem jest na rys. 8c słupek oznaczony numerem Jest on miarą róż nicy współrzę dnych ruchu elementu 11 i elementu 1, okreś lonej w punkcie ich styku. Sł upki pozostał e informują o amplitudach drgań wzglę dnych mię dzy kolejnymi brył ami (zgodnie z naniesionym na nich opisem). Został y one wyznaczone w płaszczyź ni e styku mię dzy odpowiednimi elementami, a nastę pnie przetransformowane do punkrą styku narzę dzia z przedmiotem obrabianym (N- P). Z rys. 8b widać, że drgania wzglę dne (N P) wyznaczyć moż na także jako sumę drgań wzglę dnych brył obejmują cych" proces skrawania (na rys. 8c zaznaczono je gwiazdkami). Sumowanie nie odbywa się jednak wprost, gdyż czę ść z tych elementów wykonuje drgania przesunię te w fazie o ok. 18 w stosunku do pozostał ych. Bardzo dobrze uwidacznia to film. Rysunek (8a i 9a) niestety w tym zakresie jest nieczytelny, wobec czego na histogramie (8c i 9c) obok gwiazdek dla rozróż nienia faz podano znak + " lub ". Tak wię c w prawej czę śi crysunków 8 i 9 (c i d) przedstawione są histogramy pokazują ce wpływ drgań wzglę dnych poszczególnych brył na amplitudy drgań wystę pują cych mię dzy narzę dziem i przedmiotem. Przykładowo sł upek histogramu oznaczony numerem 1 4 informuje o tym, jak duży udział w drganiach mię dzy narzę dziem i przedmiotem ma ruch przedmiotu obrabianego (element nr 1) wzglę dem ś rodkowej czę ś i cstołu (element nr 4). Na rys. 8c i 9c udziały wszystkich brył (w sensie amplitudowym) zrzutowane został y na kierunek, w którym amplitudy drgań wzglę dnych narzę dzia i przedmiotów są najwię ksze. Tę samą informację lecz w rozbiciu na współ rzę dne przedstawia rys. d. Na podstawie tak przedstawionych wyników łatwo wskazać ogniwa 1, które są najsłabsze w badanej frezarce. Z przedstawionych rysunków wynika, że przy czę stotliwoś i c 56 Hz najsłabszym ogniwem frezarki jest grupa wrzecionowa wraz z narzę dziem skrawają cym, natomiast przy czę stotliwoś i c376 Hz elementy mocują ce przedmiot obrabiany. Mimo iż silnik (element nr 12) nie uczestniczy bezpoś rednio w łań cuchu brył zamykają cych" proces skrawania rys. 8b i 9b, to jednak sposób jego mocowania winien być zmieniony (rys. 8 i 9), gdyż tak znaczna masa zamocowana jest do korpusu obrabiarki za pomocą zbyt podatnych elementów, wobec czego amplitudy drgań silnika są znaczne. Mogą wię c zaistnieć takie sytuacje, kiedy staje się on generatorem drgań cał ej obrabiarki. 6. Podsumowanie Przedstawiona w pracy metoda badawcza umoż liwia zarówno jakoś ciową jak i iloś ciową ocenę właś ciwoś i cdynamicznych ukł adów noś nych (w tym również obrabiarek) na pod-

19 ANALIZA MODALNA OBRABIAREK 55 stawie analizy postaci drgań. Przyję ty model badawczy oparty na zał oż eniach metody SES sprawia, że w łatwy sposób moż na okreś lić udziały badanych zespołów obrabiarki w drganiach wzglę dnych mię dzy narzę dziem i przedmiotem obrabianym. Powyż szy model umoż liwia także skrócenie czasu badań w zwią zku z ograniczeniem do sześ ciu liczby czujników niezbę dnych do pomiaru drgań poszczególnych elementów badanego urzą - dzenia. Testy efektywnoś ci procedur aproksymacji doś wiadczalnie wyznaczonych charakterystyk czę stotliwoś ciowych pokazują, że uzyskanie zadowalają cych wyników wymaga stosunkowo duż ej liczby iteracji procesu obliczeniowego. Czas trwania takich obliczeń jest jednak nieporównywalnie krótszy od czasu wykonania samych badań, nie stanowi zatem istotnego problemu. Aproksymacja charakterystyk prowadzi do wygł adzenia ich przebiegu, co zmniejsza błę dy losowe, jakimi mogą być obarczone charakterystyki doś wiadczalne przed aproksymacją. W rozważ aniach dotyczą cych transformacji wskazano na moż liwość wykonywania tych operacji także na charakterystykach aproksymują cych (opisanych zależ noś ą ci 12). Wyniki badań doś wiadczalnych (przedstawione przykł adowo na rys. 8 i 9) stanowią bardzo czytelną informację o zachowaniu się obrabiarki podczas drgań z okreś loną czę stotliwoś ci ą rezonansową. Moż na wię c stwierdzić, iż opracowana i przedstawiona w pracy metoda badań obiektów dynamicznych może być szczególnie przydatna przy badaniach prototypowych obrabiarek, gdyż na podstawie otrzymanych plastycznych obrazów zachowania się badanej obrabiarki przy danych wymuszeniach umoż liwia wskazanie w sposób bezbł ę dny ogniwa najsłabszego z punktu widzenia jego udziału w drganiach mię dzy narzę dziem i przedmiotem obrabianym. Umoż liwia to konstruktorowi w sposób efektywny wpł yną ć na minimalizację tych drgań. Jednocześ nie metoda ta pozwala na zbadanie całego obiektu dynamicznego, jakim jest obrabiarka, przy uż yciu tylko siedmiu czujników pomiarowych. Opracowana metoda aproksymacji i transformacji charakterystyk wyznaczonych doś wiadczalnie umoż liwia przechowywanie ich w formie niewielkich tablic ze współ czynnikami wielomianów aproksymują cych. Literatura 1. W. LISEWSKI, P. GUTOWSKI, Wykorzystanie analizy modalnej do badania ukł adów dynamicznych o wielu stopniach swobody, Mechanika Teoretyczna i Stosowana, 1987 nr R. SNOEYS, U. ROESEMS, U. VANDEURZEN, P. VANHONACKER, Survey of Modal Analysis Aplicatiom, CIRP Ann. 1979, Vol. 28 nr 2 s M. WECK, K. TEIPEL, Dynamisches Verhalten Spanender Verkzeugmaschinen, Berlin, Springer Verlag B. A. KyflHHOB, B. A. KOIJHHEB, E. H. IHHBAHOB, Hcnumami.fi mokapnux cmaukoe ua eu6poycmpounueocmh jnemodom pmauun, OraHKH u HHCTpyiweHT, 4, J. KRUSZEWSKI i in., Metoda sztywnych elementów skoń czonych, Warszawa, Arkady J. BARAN, Zastosowanie dynamiki ruchu przestrzennego dala sztywnego 2 wią zamido teorii identyfikacji obiektu modelowanego nieswobodnym ciał em sztywnym, Prace Naukowe Politechniki Szczeciń skiej Nr 6, Szczecin B. C. ToyEEBj Op3dejiemiu Kojieć amtumeepdozo m&iia Ha KOMtiomHmu c nomoią tone33aektnpmeckux B, MarmnioBeflemie, 5, 1967, Mocraa. 7 Mech. Teoret. i Stos. 3/88

20 56 W. LISEWSKI, P. GUTOWSKI 8. A. KORYCKI, W. LISEWSKI, Z. MINCIEL, Wykorzystanie komputera do detekcji sł abych ogniw obrabiarki, Mater. Konf. nt. Zastosowanie komputerów w przemyś le. Tom 3. Szczecin J. PETERS, W. MERGEAY, Dynamie Analysis of Machine Tools Using Complex Modal Method, CTRP Ann 1976 Vol. 25 nr 1 s E. K. PROSSLER, Experimentell rechnerische Analyse von Maschinenschwingungen, VDI- Verlag, Dusseldorf A. BODNAR i inn, Metodyka doś wiadczalnego wyznaczania czę stotliwoś ciowychcharakterystyk obrabiarek (w druku). 12. A. BODNAR, W. LISEWSKI, O potrzebie korygowania charakterystyk dynamicznych skaż onychwpł ywem sił ownika, Postę py Technologii Maszyn i Urzą dzeń, 1981 zesz. 1. P e 3 K) M e nphmehehhe 3JIEMEHTOB MOffAJTiHOrO AHAJIH3A K AHHAMH^ECKHM HCCJIEflOBAHUSIM CTAHKOB B cratte npeflcxabjiehbi npmwepfei Hcnoj&3OBannH ajieiweirrob MOflajiMioro ahajnm HccjiesoBaHHHx MeianxtopeJKymHX CT3HKOB. Rnst SKcnepflMeHTajiŁHo onpeflejie'hhbix aiwnnhtyaho- 4>a- 3Bo- HacioTHbix xapaktephcthk noka3ahw adpdiektfci nx anpokchmainro npn ncnojil3obahmh iwetofla oimcahhoro B npeatiflymeii watbe [1]. IIoKa3aHo, ^TO nocne anpokchiwaiihh ^acrothbie xapaktephcthkh BO3MOH{HO TpaHCcpopMHpoBaTb cornacho npabhjiam flbhhtehhh >Kecri<oro Tejia. HaKOHerj, B cratbe npeflcrabjiehbi pe3yjn.tatw HccJieflosaHidł paajih'ihbix crahkob, noka3bibaiouj(he BO3MOJKHOCTŁ yi<a3ahhh HX cjia6oro 3BeHa. Summary PRACTICAL APPLICATIONS OF THE MODAL ANALYSIS ELEMENTS TO DYNAMICAL TEST OF MACHINE TOOLS The examples of the application of modal analysis in dynamic tests of machine tools have been presented in this paper. For experimentally obtained frequency characteristics the effects of approximation have been shown by the use of the previously described [1] method. It has been proved that the frequency characteristics can be transformed after the approximation in conformity with the principles of the rigid body motion. Finally, the results of tests made on various machine tools have been presented. These tests enabled to indicate the weakest point in the machine. Praca wpł ynę ł a do Redakcji dnia 18 maja 1987 roku.

Podstawowe działania w rachunku macierzowym
 Podstawowe działania w rachunku macierzowym Marcin Detka Katedra Informatyki Stosowanej Kielce, Wrzesień 2004 1 MACIERZE 1 1 Macierze Macierz prostokątną A o wymiarach m n (m wierszy w n kolumnach) definiujemy:
Podstawowe działania w rachunku macierzowym Marcin Detka Katedra Informatyki Stosowanej Kielce, Wrzesień 2004 1 MACIERZE 1 1 Macierze Macierz prostokątną A o wymiarach m n (m wierszy w n kolumnach) definiujemy:
Scenariusz lekcji. Wojciech Dindorf Elżbieta Krawczyk
 Scenariusz lekcji Czy światło ma naturę falową Wojciech Dindorf Elżbieta Krawczyk? Doświadczenie Younga. Cele lekcji nasze oczekiwania: Chcemy, aby uczeń: postrzegał doś wiadczenie jako ostateczne rozstrzygnię
Scenariusz lekcji Czy światło ma naturę falową Wojciech Dindorf Elżbieta Krawczyk? Doświadczenie Younga. Cele lekcji nasze oczekiwania: Chcemy, aby uczeń: postrzegał doś wiadczenie jako ostateczne rozstrzygnię
PRAWA ZACHOWANIA. Podstawowe terminy. Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc
 PRAWA ZACHOWANIA Podstawowe terminy Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc a) si wewn trznych - si dzia aj cych na dane cia o ze strony innych
PRAWA ZACHOWANIA Podstawowe terminy Cia a tworz ce uk ad mechaniczny oddzia ywuj mi dzy sob i z cia ami nie nale cymi do uk adu za pomoc a) si wewn trznych - si dzia aj cych na dane cia o ze strony innych
I B. EFEKT FOTOWOLTAICZNY. BATERIA SŁONECZNA
 1 OPTOELEKTRONKA B. EFEKT FOTOWOLTACZNY. BATERA SŁONECZNA Cel ćwiczenia: 1.Zbadanie zależności otoprądu zwarcia i otonapięcia zwarcia od natężenia oświetlenia. 2. Wyznaczenie sprawności energetycznej baterii
1 OPTOELEKTRONKA B. EFEKT FOTOWOLTACZNY. BATERA SŁONECZNA Cel ćwiczenia: 1.Zbadanie zależności otoprądu zwarcia i otonapięcia zwarcia od natężenia oświetlenia. 2. Wyznaczenie sprawności energetycznej baterii
ci trwałej modułu steruj cego robota. Po wł niami i programami. W czasie działania wykorzystywane w czasie działania programu: wy robota (poło
 ci trwałej modułu steruj cego robota. Po wł niami i programami. W czasie działania wykorzystywane w czasie działania programu: wy robota (poło W systemie AS robot jest sterowany i obsługiwany w trznych
ci trwałej modułu steruj cego robota. Po wł niami i programami. W czasie działania wykorzystywane w czasie działania programu: wy robota (poło W systemie AS robot jest sterowany i obsługiwany w trznych
USTAWA. z dnia 26 czerwca 1974 r. Kodeks pracy. 1) (tekst jednolity)
 (tekst jednolity)") Dz.U.98.21.94 1998.09.01 zm. Dz.U.98.113.717 art. 5 1999.01.01 zm. Dz.U.98.106.668 art. 31 2000.01.01 zm. Dz.U.99.99.1152 art. 1 2000.04.06 zm. Dz.U.00.19.239 art. 2 2001.01.01 zm. Dz.U.00.43.489 art.
Dz.U.98.21.94 1998.09.01 zm. Dz.U.98.113.717 art. 5 1999.01.01 zm. Dz.U.98.106.668 art. 31 2000.01.01 zm. Dz.U.99.99.1152 art. 1 2000.04.06 zm. Dz.U.00.19.239 art. 2 2001.01.01 zm. Dz.U.00.43.489 art.
WZORU UŻYTKOWEGO EGZEMPLARZ ARCHIWALNY. d2)opis OCHRONNY. (19) PL (n)62894. Centralny Instytut Ochrony Pracy, Warszawa, PL
opis OCHRONNY. (19) PL (n)62894. Centralny Instytut Ochrony Pracy, Warszawa, PL") RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej d2)opis OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 112772 (22) Data zgłoszenia: 29.11.2001 EGZEMPLARZ ARCHIWALNY (19) PL (n)62894 (13)
RZECZPOSPOLITA POLSKA Urząd Patentowy Rzeczypospolitej Polskiej d2)opis OCHRONNY WZORU UŻYTKOWEGO (21) Numer zgłoszenia: 112772 (22) Data zgłoszenia: 29.11.2001 EGZEMPLARZ ARCHIWALNY (19) PL (n)62894 (13)
System przenośnej tablicy interaktywnej CM2 MAX. Przewodnik użytkownika
 System przenośnej tablicy interaktywnej CM2 MAX Przewodnik użytkownika Spis treści Wprowadzenie.1 Specyfikacje.2 Najważ niejszecechyproduktu.3 Montaż zestawuinstalacjaoprogramowania.4 InstalacjasterownikasystemowegotablicyinteraktywnejONfinity.6
System przenośnej tablicy interaktywnej CM2 MAX Przewodnik użytkownika Spis treści Wprowadzenie.1 Specyfikacje.2 Najważ niejszecechyproduktu.3 Montaż zestawuinstalacjaoprogramowania.4 InstalacjasterownikasystemowegotablicyinteraktywnejONfinity.6
Bazy danych. Andrzej Łachwa, UJ, 2013 andrzej.lachwa@uj.edu.pl www.uj.edu.pl/web/zpgk/materialy 9/15
 Bazy danych Andrzej Łachwa, UJ, 2013 andrzej.lachwa@uj.edu.pl www.uj.edu.pl/web/zpgk/materialy 9/15 Przechowywanie danych Wykorzystanie systemu plików, dostępu do plików za pośrednictwem systemu operacyjnego
Bazy danych Andrzej Łachwa, UJ, 2013 andrzej.lachwa@uj.edu.pl www.uj.edu.pl/web/zpgk/materialy 9/15 Przechowywanie danych Wykorzystanie systemu plików, dostępu do plików za pośrednictwem systemu operacyjnego
Badanie silnika asynchronicznego jednofazowego
 Badanie silnika asynchronicznego jednofazowego Cel ćwiczenia Celem ćwiczenia jest poznanie budowy i zasady funkcjonowania silnika jednofazowego. W ramach ćwiczenia badane są zmiany wartości prądu rozruchowego
Badanie silnika asynchronicznego jednofazowego Cel ćwiczenia Celem ćwiczenia jest poznanie budowy i zasady funkcjonowania silnika jednofazowego. W ramach ćwiczenia badane są zmiany wartości prądu rozruchowego
Ćwiczenie: "Ruch harmoniczny i fale"
 Ćwiczenie: "Ruch harmoniczny i fale" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia:
Ćwiczenie: "Ruch harmoniczny i fale" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia:
REDUKCJA STOPNI SWOBODY UKŁADÓW DYSKRETNYCH JANUSZ BARAN, KRZYSZTOF MARCHELEK
 MECHANIKA TEORETYCZNA STOSOWANA, 9 (97) REDUKCJA STOPNI SWOBODY UKŁADÓW DYSKRETNYCH JANUSZ BARAN, KRZYSZTOF MARCHELEK (SZCZECIN) Przy modelowaniu maszyn za pomocą ukł adów dyskretnych bardzo waż ną rolę
MECHANIKA TEORETYCZNA STOSOWANA, 9 (97) REDUKCJA STOPNI SWOBODY UKŁADÓW DYSKRETNYCH JANUSZ BARAN, KRZYSZTOF MARCHELEK (SZCZECIN) Przy modelowaniu maszyn za pomocą ukł adów dyskretnych bardzo waż ną rolę
IDENTYFIKACJA PARAMETRYCZNA MODELU MATEMATYCZNEGO SAMOLOTU. 1. Wprowadzenie
 MECHANIKA TEORETYCZNA I STOSOWANA 3, 25, (1987) IDENTYFIKACJA PARAMETRYCZNA MODELU MATEMATYCZNEGO SAMOLOTU WŁADYSŁAW JAROMINEK Polska Akademia Nauk, Warszawa TADEUSZ STEFAŃ SKI Politechnika Ś wię tokrzyska,kielce
MECHANIKA TEORETYCZNA I STOSOWANA 3, 25, (1987) IDENTYFIKACJA PARAMETRYCZNA MODELU MATEMATYCZNEGO SAMOLOTU WŁADYSŁAW JAROMINEK Polska Akademia Nauk, Warszawa TADEUSZ STEFAŃ SKI Politechnika Ś wię tokrzyska,kielce
1. Podstawy budowania wyra e regularnych (Regex)
") Dla wi kszo ci prostych gramatyk mo na w atwy sposób napisa wyra enie regularne które b dzie s u y o do sprawdzania poprawno ci zda z t gramatyk. Celem niniejszego laboratorium b dzie zapoznanie si z wyra
Dla wi kszo ci prostych gramatyk mo na w atwy sposób napisa wyra enie regularne które b dzie s u y o do sprawdzania poprawno ci zda z t gramatyk. Celem niniejszego laboratorium b dzie zapoznanie si z wyra
Wyznaczanie współczynnika sprężystości sprężyn i ich układów
 Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
Ćwiczenie 63 Wyznaczanie współczynnika sprężystości sprężyn i ich układów 63.1. Zasada ćwiczenia W ćwiczeniu określa się współczynnik sprężystości pojedynczych sprężyn i ich układów, mierząc wydłużenie
Temat: Funkcje. Własności ogólne. A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1
 Temat: Funkcje. Własności ogólne A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1 Kody kolorów: pojęcie zwraca uwagę * materiał nieobowiązkowy A n n a R a
Temat: Funkcje. Własności ogólne A n n a R a j f u r a, M a t e m a t y k a s e m e s t r 1, W S Z i M w S o c h a c z e w i e 1 Kody kolorów: pojęcie zwraca uwagę * materiał nieobowiązkowy A n n a R a
SYSTEM PRZERWA Ń MCS 51
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Zakład Cybernetyki i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWA Ń MCS 51 Opracował: mgr inŝ. Andrzej Biedka Uwolnienie
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Zakład Cybernetyki i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWA Ń MCS 51 Opracował: mgr inŝ. Andrzej Biedka Uwolnienie
Harmonogramowanie projektów Zarządzanie czasem
 Harmonogramowanie projektów Zarządzanie czasem Zarządzanie czasem TOMASZ ŁUKASZEWSKI INSTYTUT INFORMATYKI W ZARZĄDZANIU Zarządzanie czasem w projekcie /49 Czas w zarządzaniu projektami 1. Pojęcie zarządzania
Harmonogramowanie projektów Zarządzanie czasem Zarządzanie czasem TOMASZ ŁUKASZEWSKI INSTYTUT INFORMATYKI W ZARZĄDZANIU Zarządzanie czasem w projekcie /49 Czas w zarządzaniu projektami 1. Pojęcie zarządzania
Metody numeryczne i statystyka dla in»ynierów
 Kierunek: Automatyka i Robotyka, II rok Interpolacja PWSZ Gªogów, 2009 Interpolacja Okre±lenie zale»no±ci pomi dzy interesuj cymi nas wielko±ciami, Umo»liwia uproszczenie skomplikowanych funkcji (np. wykorzystywana
Kierunek: Automatyka i Robotyka, II rok Interpolacja PWSZ Gªogów, 2009 Interpolacja Okre±lenie zale»no±ci pomi dzy interesuj cymi nas wielko±ciami, Umo»liwia uproszczenie skomplikowanych funkcji (np. wykorzystywana
STATECZNOŚĆ SPIRALNA SAMOLOTU W RUCHU PRZESTRZENNYM Z UWZGLĘ DNIENIEM EFEKTÓW ELEMENTÓW WIRUJĄ CYCH ZESPOŁU NAPĘ DOWEGO*
 MECHANIKA TEORETYCZNA 1 STOSOWANA 3-4, 23 (1985) STATECZNOŚĆ SPIRALNA SAMOLOTU W RUCHU PRZESTRZENNYM Z UWZGLĘ DNIENIEM EFEKTÓW ELEMENTÓW WIRUJĄ CYCH ZESPOŁU NAPĘ DOWEGO* JERZY MARYNIAK, WITOLD MOLICKJ
MECHANIKA TEORETYCZNA 1 STOSOWANA 3-4, 23 (1985) STATECZNOŚĆ SPIRALNA SAMOLOTU W RUCHU PRZESTRZENNYM Z UWZGLĘ DNIENIEM EFEKTÓW ELEMENTÓW WIRUJĄ CYCH ZESPOŁU NAPĘ DOWEGO* JERZY MARYNIAK, WITOLD MOLICKJ
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
AUDIOMETRYCZNE BADANIE SŁUCHU ORAZ CECH WYPOWIADANYCH GŁOSEK
 AUDIOMETRYCZNE BADANIE SŁUCHU ORAZ CECH WYPOWIADANYCH GŁOSEK I. Zagadnienia 1. Wielkości Fizyczne opisują ce falę dź wię kową. 2. Powstawanie dź wię ków mowy. 3. Odbieranie dź wię ków przez narzą d słuchu.
AUDIOMETRYCZNE BADANIE SŁUCHU ORAZ CECH WYPOWIADANYCH GŁOSEK I. Zagadnienia 1. Wielkości Fizyczne opisują ce falę dź wię kową. 2. Powstawanie dź wię ków mowy. 3. Odbieranie dź wię ków przez narzą d słuchu.
Ruch w potencjale U(r)=-α/r. Zagadnienie Keplera Przybli Ŝ enie małych drgań. Wykład 7 i 8
=-α/r. Zagadnienie Keplera Przybli Ŝ enie małych drgań. Wykład 7 i 8") Wykład 7 i 8 Zagadnienie Keplera Przybli Ŝ enie małych drgań Ruch w potencjale U(r)=-α/r RozwaŜ my ruch punktu materialnego w polu centralnym, o potencjale odwrotnie proporcjonalnym do odległo ś ci r od
Wykład 7 i 8 Zagadnienie Keplera Przybli Ŝ enie małych drgań Ruch w potencjale U(r)=-α/r RozwaŜ my ruch punktu materialnego w polu centralnym, o potencjale odwrotnie proporcjonalnym do odległo ś ci r od
Drgania układu o wielu stopniach swobody
 Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
1. Rozwiązać układ równań { x 2 = 2y 1
 Dzień Dziecka z Matematyką Tomasz Szymczyk Piotrków Trybunalski, 4 czerwca 013 r. Układy równań szkice rozwiązań 1. Rozwiązać układ równań { x = y 1 y = x 1. Wyznaczając z pierwszego równania zmienną y,
Dzień Dziecka z Matematyką Tomasz Szymczyk Piotrków Trybunalski, 4 czerwca 013 r. Układy równań szkice rozwiązań 1. Rozwiązać układ równań { x = y 1 y = x 1. Wyznaczając z pierwszego równania zmienną y,
Ćw. nr 31. Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2
 1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
Wykład 3. Ruch w obecno ś ci wię zów
 Wykład 3 Ruch w obecno ś ci wię zów Wię zy Układ nieswobodnych punktów materialnych Układ punktów materialnych, których ruch podlega ograniczeniom wyraŝ onym przez pewne zadane warunki dodatkowe. Wię zy
Wykład 3 Ruch w obecno ś ci wię zów Wię zy Układ nieswobodnych punktów materialnych Układ punktów materialnych, których ruch podlega ograniczeniom wyraŝ onym przez pewne zadane warunki dodatkowe. Wię zy
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników
 Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Instrukcja do ćwiczenia jednopłaszczyznowe wyważanie wirników 1. Podstawowe pojęcia związane z niewyważeniem Stan niewyważenia stan wirnika określony takim rozkładem masy, który w czasie wirowania wywołuje
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Komentarz technik ochrony fizycznej osób i mienia 515[01]-01 Czerwiec 2009
![Komentarz technik ochrony fizycznej osób i mienia 515[01]-01 Czerwiec 2009](/thumbs/33/16479706.jpg "Komentarz technik ochrony fizycznej osób i mienia 515[01]-01 Czerwiec 2009") Strona 1 z 19 Strona 2 z 19 Strona 3 z 19 Strona 4 z 19 Strona 5 z 19 Strona 6 z 19 Strona 7 z 19 W pracy egzaminacyjnej oceniane były elementy: I. Tytuł pracy egzaminacyjnej II. Założenia do projektu
Strona 1 z 19 Strona 2 z 19 Strona 3 z 19 Strona 4 z 19 Strona 5 z 19 Strona 6 z 19 Strona 7 z 19 W pracy egzaminacyjnej oceniane były elementy: I. Tytuł pracy egzaminacyjnej II. Założenia do projektu
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie Teoria sprężystości jest działem mechaniki, zajmującym się bryłami sztywnymi i ciałami plastycznymi. Sprężystość zajmuje się odkształceniami
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie Teoria sprężystości jest działem mechaniki, zajmującym się bryłami sztywnymi i ciałami plastycznymi. Sprężystość zajmuje się odkształceniami
O MODELOWANIU W BUDOWIE MASZYN
 MECHANIKA TEORETYCZNA I STOSOWANA 4, 21 (1983) O MODELOWANIU W BUDOWIE MASZYN MAREK DIETRICH Politechnika Warszawska' Długo zastanawiał em się jak ustosunkować się do propozycji publikacji w tyra specjalnym
MECHANIKA TEORETYCZNA I STOSOWANA 4, 21 (1983) O MODELOWANIU W BUDOWIE MASZYN MAREK DIETRICH Politechnika Warszawska' Długo zastanawiał em się jak ustosunkować się do propozycji publikacji w tyra specjalnym
POMIAR I REJESTRACJA WIDMA OBCIĄ Ż EŃ SKRZYDEŁ SZYBOWCÓW LAMINATOWYCH METODĄ TENSOMETRYCZNĄ. 1. Idea pomiaru
 MECHANIKA TEORETYCZNA I STOSOWANA 1/2, 25, 1987 POMIAR I REJESTRACJA WIDMA OBCIĄ Ż EŃ SKRZYDEŁ SZYBOWCÓW LAMINATOWYCH METODĄ TENSOMETRYCZNĄ PIOTR LAMERS PZL- Bielsko 1. Idea pomiaru Dotychczasowa metoda
MECHANIKA TEORETYCZNA I STOSOWANA 1/2, 25, 1987 POMIAR I REJESTRACJA WIDMA OBCIĄ Ż EŃ SKRZYDEŁ SZYBOWCÓW LAMINATOWYCH METODĄ TENSOMETRYCZNĄ PIOTR LAMERS PZL- Bielsko 1. Idea pomiaru Dotychczasowa metoda
Film demonstracyjny z pracy narzędzia: http://www.youtube.com/watch?v=sqbjf2nazi8 S.T.M. SYSTEMY I TECHNOLOGIE MECHANICZNE SP. Z O.O.
 Film demonstracyjny z pracy narzędzia: http://www.youtube.com/watch?v=sqbjf2nazi8 S.T.M. SYSTEMY I TECHNOLOGIE MECHANICZNE SP. Z O.O. ul. Dziewosłęby 14/1, 04-403 Warszawa Tel.: 22 673 55 48 - Fax: 22
Film demonstracyjny z pracy narzędzia: http://www.youtube.com/watch?v=sqbjf2nazi8 S.T.M. SYSTEMY I TECHNOLOGIE MECHANICZNE SP. Z O.O. ul. Dziewosłęby 14/1, 04-403 Warszawa Tel.: 22 673 55 48 - Fax: 22
PL 215399 B1. POLITECHNIKA POZNAŃSKA, Poznań, PL 03.01.2011 BUP 01/11. RAFAŁ TALAR, Kościan, PL 31.12.2013 WUP 12/13
 PL 215399 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215399 (13) B1 (21) Numer zgłoszenia: 388446 (51) Int.Cl. B23F 9/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 215399 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 215399 (13) B1 (21) Numer zgłoszenia: 388446 (51) Int.Cl. B23F 9/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
P 0max. P max. = P max = 0; 9 20 = 18 W. U 2 0max. U 0max = q P 0max = p 18 2 = 6 V. D = T = U 0 = D E ; = 6
 XL OLIMPIADA WIEDZY TECHNICZNEJ Zawody II stopnia Rozwi zania zada dla grupy elektryczno-elektronicznej Rozwi zanie zadania 1 Sprawno przekszta tnika jest r wna P 0ma a Maksymaln moc odbiornika mo na zatem
XL OLIMPIADA WIEDZY TECHNICZNEJ Zawody II stopnia Rozwi zania zada dla grupy elektryczno-elektronicznej Rozwi zanie zadania 1 Sprawno przekszta tnika jest r wna P 0ma a Maksymaln moc odbiornika mo na zatem
SILNIKI ASYNCHRONICZNE INDUKCYJNE
 Temat: SILNIKI ASYNCHRONICZNE INDUKCYJNE Zagadnienia: budowa i zasada działania, charakterystyka mechaniczna, rozruch i regulacja prędkości obrotowej. PODZIAŁ MASZYN ELEKTRYCZNYCH Podział maszyn ze względu
Temat: SILNIKI ASYNCHRONICZNE INDUKCYJNE Zagadnienia: budowa i zasada działania, charakterystyka mechaniczna, rozruch i regulacja prędkości obrotowej. PODZIAŁ MASZYN ELEKTRYCZNYCH Podział maszyn ze względu
Automatyka. Etymologicznie automatyka pochodzi od grec.
 Automatyka Etymologicznie automatyka pochodzi od grec. : samoczynny. Automatyka to: dyscyplina naukowa zajmująca się podstawami teoretycznymi, dział techniki zajmujący się praktyczną realizacją urządzeń
Automatyka Etymologicznie automatyka pochodzi od grec. : samoczynny. Automatyka to: dyscyplina naukowa zajmująca się podstawami teoretycznymi, dział techniki zajmujący się praktyczną realizacją urządzeń
1.3 Budowa. Najwa niejsze cz ci sk adowe elektrozaworu to:
 .3 Budowa Elektrozawory to elementy kontroluj ce medium pod ci nieniem. Ich zadanie polega na otwieraniu lub zamykaniu urz dzenia odcinaj cego, bezpo rednio lub po rednio, w stanie wzbudzonym cewki. Najwa
.3 Budowa Elektrozawory to elementy kontroluj ce medium pod ci nieniem. Ich zadanie polega na otwieraniu lub zamykaniu urz dzenia odcinaj cego, bezpo rednio lub po rednio, w stanie wzbudzonym cewki. Najwa
OŚWIETLENIE PRZESZKLONEJ KLATKI SCHODOWEJ
 OŚWIETLENIE PRZESZKLONEJ KLATKI SCHODOWEJ Przykład aplikacji: rys. 1 rys. 2 rys. 3 rys. 4 W tym przypadku do sterowania oświetleniem wykorzystano przekaźniki fi rmy Finder: wyłącznik zmierzchowy 11.01.8.230.0000
OŚWIETLENIE PRZESZKLONEJ KLATKI SCHODOWEJ Przykład aplikacji: rys. 1 rys. 2 rys. 3 rys. 4 W tym przypadku do sterowania oświetleniem wykorzystano przekaźniki fi rmy Finder: wyłącznik zmierzchowy 11.01.8.230.0000
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA TULEJI CYLINDROWYCH SILNIKA SPALINOWEGO
 LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA TULEJI CYLINDROWYCH SILNIKA SPALINOWEGO 2 1. Cel ćwiczenia : Dokonać pomiaru zuŝycia tulei cylindrowej (cylindra) W wyniku opanowania treści ćwiczenia student
LABORATORIUM TECHNOLOGII NAPRAW WERYFIKACJA TULEJI CYLINDROWYCH SILNIKA SPALINOWEGO 2 1. Cel ćwiczenia : Dokonać pomiaru zuŝycia tulei cylindrowej (cylindra) W wyniku opanowania treści ćwiczenia student
Przygotowały: Magdalena Golińska Ewa Karaś
 Przygotowały: Magdalena Golińska Ewa Karaś Druk: Drukarnia VIVA Copyright by Infornext.pl ISBN: 978-83-61722-03-8 Wydane przez Infornext Sp. z o.o. ul. Okopowa 58/72 01 042 Warszawa www.wieszjak.pl Od
Przygotowały: Magdalena Golińska Ewa Karaś Druk: Drukarnia VIVA Copyright by Infornext.pl ISBN: 978-83-61722-03-8 Wydane przez Infornext Sp. z o.o. ul. Okopowa 58/72 01 042 Warszawa www.wieszjak.pl Od
...^Ł7... listopada 2013. r.
 Uchwała Nr.^^../2013 z dniazyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcba...^ł7... listopada 2013. r. w sprawie przyję cia zarzą dzenia zmieniają cego zarzą dzenie w sprawie wprowadzenia Zasad wstę
Uchwała Nr.^^../2013 z dniazyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcba...^ł7... listopada 2013. r. w sprawie przyję cia zarzą dzenia zmieniają cego zarzą dzenie w sprawie wprowadzenia Zasad wstę
1. A. B. C. D. 2. A. B. C. D. 3. A. B. C. D. 4. A. B. C. D.
 1. Z równi pochyłej startują dwa pełne, jednorodne walce. Jeden walec to pałeczka szklana uż ywana do elektrostatyki, drugi, to fragment kolumny greckiej o ś rednicy 0,5 m. Zakładając idealne warunki (brak
1. Z równi pochyłej startują dwa pełne, jednorodne walce. Jeden walec to pałeczka szklana uż ywana do elektrostatyki, drugi, to fragment kolumny greckiej o ś rednicy 0,5 m. Zakładając idealne warunki (brak
Opis programu do wizualizacji algorytmów z zakresu arytmetyki komputerowej
 Opis programu do wizualizacji algorytmów z zakresu arytmetyki komputerowej 3.1 Informacje ogólne Program WAAK 1.0 służy do wizualizacji algorytmów arytmetyki komputerowej. Oczywiście istnieje wiele narzędzi
Opis programu do wizualizacji algorytmów z zakresu arytmetyki komputerowej 3.1 Informacje ogólne Program WAAK 1.0 służy do wizualizacji algorytmów arytmetyki komputerowej. Oczywiście istnieje wiele narzędzi
Programowanie obrabiarek CNC. Nr H8
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Programowanie obrabiarek CNC Nr H8 Programowanie obróbki 5-osiowej (3+2) w układzie sterowania itnc530 Opracował: Dr inż. Wojciech
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Programowanie obrabiarek CNC Nr H8 Programowanie obróbki 5-osiowej (3+2) w układzie sterowania itnc530 Opracował: Dr inż. Wojciech
Metrologia cieplna i przepływowa
 Metrologia cieplna i przepływowa Systemy, Maszyny i Urządzenia Energetyczne, I rok mgr Pomiar małych ciśnień Instrukcja do ćwiczenia Katedra Systemów Energetycznych i Urządzeń Ochrony Środowiska AGH Kraków
Metrologia cieplna i przepływowa Systemy, Maszyny i Urządzenia Energetyczne, I rok mgr Pomiar małych ciśnień Instrukcja do ćwiczenia Katedra Systemów Energetycznych i Urządzeń Ochrony Środowiska AGH Kraków
Filtracja obrazów w dziedzinie Fouriera
 Filtracja obrazów w dziedzinie Fouriera Filtracj mo na zinterpretowa jako mno enie punktowe dwóch F-obrazów - jednego pochodz cego od filtrowanego obrazu i drugiego b d cego filtrem. Wykres amplitudy F-
Filtracja obrazów w dziedzinie Fouriera Filtracj mo na zinterpretowa jako mno enie punktowe dwóch F-obrazów - jednego pochodz cego od filtrowanego obrazu i drugiego b d cego filtrem. Wykres amplitudy F-
'()(*+,-./01(23/*4*567/8/23/*98:)2(!."/+)012+3$%-4#"4"$5012#-4#"4-6017%*,4.!"#$!"#%&"!!!"#$%&"#'()%*+,-+
(*+,-./01(23/*4*567/8/23/*98:)2(!./+)012+3$%-4#4$5012#-4#4-6017%*,4.!#$!#%&!!!#$%&#'()%*+,-+") '()(*+,-./01(23/*4*567/8/23/*98:)2(!."/+)012+3$%-4#"4"$5012#-4#"4-6017%*,4.!"#$!"#%&"!!!"#$%&"#'()%*+,-+ Ucze interpretuje i tworzy teksty o charakterze matematycznym, u ywa j zyka matematycznego do opisu
'()(*+,-./01(23/*4*567/8/23/*98:)2(!."/+)012+3$%-4#"4"$5012#-4#"4-6017%*,4.!"#$!"#%&"!!!"#$%&"#'()%*+,-+ Ucze interpretuje i tworzy teksty o charakterze matematycznym, u ywa j zyka matematycznego do opisu
REGULAMIN PRZEPROWADZANIA OCEN OKRESOWYCH PRACOWNIKÓW NIEBĘDĄCYCH NAUCZYCIELAMI AKADEMICKIMI SZKOŁY GŁÓWNEJ HANDLOWEJ W WARSZAWIE
 Załącznik do zarządzenia Rektora nr 36 z dnia 28 czerwca 2013 r. REGULAMIN PRZEPROWADZANIA OCEN OKRESOWYCH PRACOWNIKÓW NIEBĘDĄCYCH NAUCZYCIELAMI AKADEMICKIMI SZKOŁY GŁÓWNEJ HANDLOWEJ W WARSZAWIE 1 Zasady
Załącznik do zarządzenia Rektora nr 36 z dnia 28 czerwca 2013 r. REGULAMIN PRZEPROWADZANIA OCEN OKRESOWYCH PRACOWNIKÓW NIEBĘDĄCYCH NAUCZYCIELAMI AKADEMICKIMI SZKOŁY GŁÓWNEJ HANDLOWEJ W WARSZAWIE 1 Zasady
O MOŻ LIWOŚ I CROZSZERZENIA METODYKI BADAŃ POWIERZCHNI PĘ KNIĘ Ć ZMĘ CZENIOWYCH*)
") MECHANIKA TEORETYCZNA I STOSOWANA 3, 13 (1975) O MOŻ LIWOŚ I CROZSZERZENIA METODYKI BADAŃ POWIERZCHNI PĘ KNIĘ Ć ZMĘ CZENIOWYCH*) STANISŁAW KOCAŃ DA, JAN KOZUBOWSKI (WARSZAWA) Badania mikrobudowy złomów
MECHANIKA TEORETYCZNA I STOSOWANA 3, 13 (1975) O MOŻ LIWOŚ I CROZSZERZENIA METODYKI BADAŃ POWIERZCHNI PĘ KNIĘ Ć ZMĘ CZENIOWYCH*) STANISŁAW KOCAŃ DA, JAN KOZUBOWSKI (WARSZAWA) Badania mikrobudowy złomów
DRGANIA MECHANICZNE. materiały uzupełniające do ćwiczeń. Wydział Samochodów i Maszyn Roboczych studia inżynierskie
 DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część modelowanie, drgania swobodne Poniższe materiały
DRGANIA MECHANICZNE materiały uzupełniające do ćwiczeń Wydział Samochodów i Maszyn Roboczych studia inżynierskie prowadzący: mgr inż. Sebastian Korczak część modelowanie, drgania swobodne Poniższe materiały
Zarządzanie projektami. wykład 1 dr inż. Agata Klaus-Rosińska
 Zarządzanie projektami wykład 1 dr inż. Agata Klaus-Rosińska 1 DEFINICJA PROJEKTU Zbiór działań podejmowanych dla zrealizowania określonego celu i uzyskania konkretnego, wymiernego rezultatu produkt projektu
Zarządzanie projektami wykład 1 dr inż. Agata Klaus-Rosińska 1 DEFINICJA PROJEKTU Zbiór działań podejmowanych dla zrealizowania określonego celu i uzyskania konkretnego, wymiernego rezultatu produkt projektu
WYZNACZANIE MODELU STEROWANIA SAMOLOTEM ZAPEWNIAJĄ CEGO Ś CISŁĄ REALIZACJĘ RUCHU PROGRAMOWEGO*
 MECHANIKA TEORETYCZNA I STOSOWANA 3, 25, (1987) WYZNACZANIE MODELU STEROWANIA SAMOLOTEM ZAPEWNIAJĄ CEGO Ś CISŁĄ REALIZACJĘ RUCHU PROGRAMOWEGO* WOJCIECH BLAJER Wyż szaszkoł a Inż ynierska w Radomiu Praca
MECHANIKA TEORETYCZNA I STOSOWANA 3, 25, (1987) WYZNACZANIE MODELU STEROWANIA SAMOLOTEM ZAPEWNIAJĄ CEGO Ś CISŁĄ REALIZACJĘ RUCHU PROGRAMOWEGO* WOJCIECH BLAJER Wyż szaszkoł a Inż ynierska w Radomiu Praca
WYKŁAD 8. Postacie obrazów na różnych etapach procesu przetwarzania
 WYKŁAD 8 Reprezentacja obrazu Elementy edycji (tworzenia) obrazu Postacie obrazów na różnych etapach procesu przetwarzania Klasy obrazów Klasa 1: Obrazy o pełnej skali stopni jasności, typowe parametry:
WYKŁAD 8 Reprezentacja obrazu Elementy edycji (tworzenia) obrazu Postacie obrazów na różnych etapach procesu przetwarzania Klasy obrazów Klasa 1: Obrazy o pełnej skali stopni jasności, typowe parametry:
INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych
 ZAKŁAD PODSTAW KONSTRUKCJI I EKSPLOATACJI MASZYN ENERGETYCZNYCH Instytut Maszyn i Urządzeń Energetycznych Politechnika Śląska INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych Wprowadzenie
ZAKŁAD PODSTAW KONSTRUKCJI I EKSPLOATACJI MASZYN ENERGETYCZNYCH Instytut Maszyn i Urządzeń Energetycznych Politechnika Śląska INSTRUKCJA do ćwiczenia Wyważanie wirnika maszyny w łożyskach własnych Wprowadzenie
3. Macierze i Układy Równań Liniowych
 3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
3. Macierze i Układy Równań Liniowych Rozważamy równanie macierzowe z końcówki ostatniego wykładu ( ) 3 1 X = 4 1 ( ) 2 5 Podstawiając X = ( ) x y i wymnażając, otrzymujemy układ 2 równań liniowych 3x
ANALOGOWE UKŁADY SCALONE
 ANALOGOWE UKŁADY SCALONE Ćwiczenie to ma na celu zapoznanie z przedstawicielami najważniejszych typów analogowych układów scalonych. Będą to: wzmacniacz operacyjny µa 741, obecnie chyba najbardziej rozpowszechniony
ANALOGOWE UKŁADY SCALONE Ćwiczenie to ma na celu zapoznanie z przedstawicielami najważniejszych typów analogowych układów scalonych. Będą to: wzmacniacz operacyjny µa 741, obecnie chyba najbardziej rozpowszechniony
Urządzenia do bezprzerwowego zasilania UPS CES GX RACK. 10 kva. Wersja U/CES_GXR_10.0/J/v01. Praca równoległa
 Urządzenia do bezprzerwowego zasilania UPS CES GX RACK 10 kva Centrum Elektroniki Stosowanej CES sp. z o. o. 30-732 Kraków, ul. Biskupińska 14 tel.: (012) 269-00-11 fax: (012) 267-37-28 e-mail: ces@ces.com.pl,
Urządzenia do bezprzerwowego zasilania UPS CES GX RACK 10 kva Centrum Elektroniki Stosowanej CES sp. z o. o. 30-732 Kraków, ul. Biskupińska 14 tel.: (012) 269-00-11 fax: (012) 267-37-28 e-mail: ces@ces.com.pl,
I. POSTANOWIENIE OGÓLNE
 Załącznik do Zarządzenia Nr 26/2015 Rektora UKSW z dnia 1 lipca 2015 r. REGULAMIN ZWIĘKSZENIA STYPENDIUM DOKTORANCKIEGO Z DOTACJI PODMIOTOWEJ NA DOFINANSOWANIE ZADAŃ PROJAKOŚCIOWYCH NA UNIWERSYTETCIE KARDYNAŁA
Załącznik do Zarządzenia Nr 26/2015 Rektora UKSW z dnia 1 lipca 2015 r. REGULAMIN ZWIĘKSZENIA STYPENDIUM DOKTORANCKIEGO Z DOTACJI PODMIOTOWEJ NA DOFINANSOWANIE ZADAŃ PROJAKOŚCIOWYCH NA UNIWERSYTETCIE KARDYNAŁA
METODA IDENTYFIKACJI PODATNOŚ CI DYNAMICZNEJ FUNDAMENTÓW MASZYN JANUSZ K O L E N D A (GDAŃ SK) 1. Wstę p
 1. Wstę p") MECHANIKA TEORETYCZNA I STOSOWANA 3, 6 (978) METODA IDENTYFIKACJI PODATNOŚ CI DYNAMICZNEJ FUNDAMENTÓW MASZYN JANUSZ K O L E N D A (GDAŃ SK). Wstę p Obserwowany w ostatnich latach wzrost mocy jednostkowych
MECHANIKA TEORETYCZNA I STOSOWANA 3, 6 (978) METODA IDENTYFIKACJI PODATNOŚ CI DYNAMICZNEJ FUNDAMENTÓW MASZYN JANUSZ K O L E N D A (GDAŃ SK). Wstę p Obserwowany w ostatnich latach wzrost mocy jednostkowych
Regulamin Konkursu Start up Award 9. Forum Inwestycyjne 20-21 czerwca 2016 r. Tarnów. Organizatorzy Konkursu
 Regulamin Konkursu Start up Award 9. Forum Inwestycyjne 20-21 czerwca 2016 r. Tarnów 1 Organizatorzy Konkursu 1. Organizatorem Konkursu Start up Award (Konkurs) jest Fundacja Instytut Studiów Wschodnich
Regulamin Konkursu Start up Award 9. Forum Inwestycyjne 20-21 czerwca 2016 r. Tarnów 1 Organizatorzy Konkursu 1. Organizatorem Konkursu Start up Award (Konkurs) jest Fundacja Instytut Studiów Wschodnich
ZAANGA OWANIE PRACOWNIKÓW W PROJEKTY INFORMATYCZNE
 ZAANGA OWANIE PRACOWNIKÓW W PROJEKTY INFORMATYCZNE LESZEK MISZTAL Politechnika Szczeci ska Streszczenie Celem artykułu jest przedstawienie metody rozwi zania problemu dotycz cego zaanga owania pracowników
ZAANGA OWANIE PRACOWNIKÓW W PROJEKTY INFORMATYCZNE LESZEK MISZTAL Politechnika Szczeci ska Streszczenie Celem artykułu jest przedstawienie metody rozwi zania problemu dotycz cego zaanga owania pracowników
SPRAWOZDANIE Z REALIZACJI XXXII BADAŃ BIEGŁOŚCI I BADAŃ PORÓWNAWCZYCH HAŁASU W ŚRODOWISKU Warszawa 17 18 kwiecień 2012r.
 SPRAWOZDANIE Z REALIZACJI XXXII BADAŃ BIEGŁOŚCI I BADAŃ PORÓWNAWCZYCH HAŁASU W ŚRODOWISKU Warszawa 17 18 kwiecień 2012r. 1. CEL I ZAKRES BADAŃ Organizatorem badań biegłości i badań porównawczych przeprowadzonych
SPRAWOZDANIE Z REALIZACJI XXXII BADAŃ BIEGŁOŚCI I BADAŃ PORÓWNAWCZYCH HAŁASU W ŚRODOWISKU Warszawa 17 18 kwiecień 2012r. 1. CEL I ZAKRES BADAŃ Organizatorem badań biegłości i badań porównawczych przeprowadzonych
ARKUSZ EGZAMINACYJNY ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJ CEGO KWALIFIKACJE ZAWODOWE CZERWIEC 201
 Zawód: technik elektronik Symbol cyrowy zawodu: 311[07] Numer zadania: Arkusz zawiera inormacje prawnie chronione do momentu rozpocz cia egzaminu 311[07]-0-1 2 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY
Zawód: technik elektronik Symbol cyrowy zawodu: 311[07] Numer zadania: Arkusz zawiera inormacje prawnie chronione do momentu rozpocz cia egzaminu 311[07]-0-1 2 Czas trwania egzaminu: 240 minut ARKUSZ EGZAMINACYJNY
Badanie bezszczotkowego silnika prądu stałego z magnesami trwałymi (BLDCM)
") Badanie bezszczotkowego silnika prądu stałego z magnesami trwałymi (BLDCM) Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sterowaniem bezszczotkowego silnika prądu stałego z magnesami
Badanie bezszczotkowego silnika prądu stałego z magnesami trwałymi (BLDCM) Celem ćwiczenia jest zapoznanie się z budową, zasadą działania oraz sterowaniem bezszczotkowego silnika prądu stałego z magnesami
7. ELEMENTY PŁYTOWE. gdzie [N] oznacza przyjmowane funkcje kształtu, zdefinować odkształcenia i naprężenia: zdefiniować macierz sztywności:
![7. ELEMENTY PŁYTOWE. gdzie [N] oznacza przyjmowane funkcje kształtu, zdefinować odkształcenia i naprężenia: zdefiniować macierz sztywności:](/thumbs/93/113319619.jpg "7. ELEMENTY PŁYTOWE. gdzie [N] oznacza przyjmowane funkcje kształtu, zdefinować odkształcenia i naprężenia: zdefiniować macierz sztywności:") 7. ELEMENTY PŁYTOWE 1 7. 7. ELEMENTY PŁYTOWE Rys. 7.1. Element płytowy Aby rozwiązać zadanie płytowe należy: zdefiniować geometrię płyty, dokonać podziału płyty na elementy, zdefiniować węzły, wprowadzić
7. ELEMENTY PŁYTOWE 1 7. 7. ELEMENTY PŁYTOWE Rys. 7.1. Element płytowy Aby rozwiązać zadanie płytowe należy: zdefiniować geometrię płyty, dokonać podziału płyty na elementy, zdefiniować węzły, wprowadzić
Wspomaganie decyzji. UTA - Funkcja uż yteczności
 Wspomaganie decyzji UTA - Funkcja uż yteczności Poję cie funkcji użyteczności wprowadza się, aby ustalić ogólną jakoś ć wariantu. Funkcja dokonuje agregacji wszystkich kryteriów do jednej wartoś ci. Pozwala
Wspomaganie decyzji UTA - Funkcja uż yteczności Poję cie funkcji użyteczności wprowadza się, aby ustalić ogólną jakoś ć wariantu. Funkcja dokonuje agregacji wszystkich kryteriów do jednej wartoś ci. Pozwala
POWŁOKI PROSTOKREŚ LNE OPARTE NA OKRĘ GU PRACUJĄ CE W STANIE ZGIĘ CIOWYM STANISŁAW BIELAK, ANDRZEJ DUDA. 1. Wstę p
 MECHANIKA TEORETYCZNA I STOSOWANA 4, 18 (1980) POWŁOKI PROSTOKREŚ LNE OPARTE NA OKRĘ GU PRACUJĄ CE W STANIE ZGIĘ CIOWYM STANISŁAW BIELAK, ANDRZEJ DUDA (OPOLE) 1. Wstę p W pracy przedstawiono rozwią zanie
MECHANIKA TEORETYCZNA I STOSOWANA 4, 18 (1980) POWŁOKI PROSTOKREŚ LNE OPARTE NA OKRĘ GU PRACUJĄ CE W STANIE ZGIĘ CIOWYM STANISŁAW BIELAK, ANDRZEJ DUDA (OPOLE) 1. Wstę p W pracy przedstawiono rozwią zanie
Komentarz do prac egzaminacyjnych w zawodzie technik administracji 343[01] ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE
![Komentarz do prac egzaminacyjnych w zawodzie technik administracji 343[01] ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE](/thumbs/39/18551291.jpg "Komentarz do prac egzaminacyjnych w zawodzie technik administracji 343[01] ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE") Komentarz do prac egzaminacyjnych w zawodzie technik administracji 343[01] ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE OKE Kraków 2012 Zadanie egzaminacyjne zostało opracowane
Komentarz do prac egzaminacyjnych w zawodzie technik administracji 343[01] ETAP PRAKTYCZNY EGZAMINU POTWIERDZAJĄCEGO KWALIFIKACJE ZAWODOWE OKE Kraków 2012 Zadanie egzaminacyjne zostało opracowane
RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA
 Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Dr inż. Andrzej Polka Katedra Dynamiki Maszyn Politechnika Łódzka RÓWNANIE DYNAMICZNE RUCHU KULISTEGO CIAŁA SZTYWNEGO W UKŁADZIE PARASOLA Streszczenie: W pracy opisano wzajemne położenie płaszczyzny parasola
Ogólna charakterystyka kontraktów terminowych
 Jesteś tu: Bossa.pl Kurs giełdowy - Część 10 Ogólna charakterystyka kontraktów terminowych Kontrakt terminowy jest umową pomiędzy dwiema stronami, z których jedna zobowiązuje się do nabycia a druga do
Jesteś tu: Bossa.pl Kurs giełdowy - Część 10 Ogólna charakterystyka kontraktów terminowych Kontrakt terminowy jest umową pomiędzy dwiema stronami, z których jedna zobowiązuje się do nabycia a druga do
DTR.ZL-24-08 APLISENS PRODUKCJA PRZETWORNIKÓW CIŚNIENIA I APARATURY POMIAROWEJ INSTRUKCJA OBSŁUGI (DOKUMENTACJA TECHNICZNO-RUCHOWA)
") DTR.ZL-24-08 APLISENS PRODUKCJA PRZETWORNIKÓW CIŚNIENIA I APARATURY POMIAROWEJ INSTRUKCJA OBSŁUGI (DOKUMENTACJA TECHNICZNO-RUCHOWA) ZASILACZ SIECIOWY TYPU ZL-24-08 WARSZAWA, KWIECIEŃ 2008. APLISENS S.A.,
DTR.ZL-24-08 APLISENS PRODUKCJA PRZETWORNIKÓW CIŚNIENIA I APARATURY POMIAROWEJ INSTRUKCJA OBSŁUGI (DOKUMENTACJA TECHNICZNO-RUCHOWA) ZASILACZ SIECIOWY TYPU ZL-24-08 WARSZAWA, KWIECIEŃ 2008. APLISENS S.A.,
Dotyczy: Odnowa centrum wsi śegiestów poprzez budowę oświetlenia ulicznego wzdłuŝ drogi powiatowej 1517K w śegiestowie
 Zp.271.14.2014 Muszyna, dnia 03 kwietnia 2014 r. Miasto i Gmina Uzdrowiskowa Muszyna ul. Rynek 31 33-370 Muszyna Dotyczy: Odnowa centrum wsi śegiestów poprzez budowę oświetlenia ulicznego wzdłuŝ drogi
Zp.271.14.2014 Muszyna, dnia 03 kwietnia 2014 r. Miasto i Gmina Uzdrowiskowa Muszyna ul. Rynek 31 33-370 Muszyna Dotyczy: Odnowa centrum wsi śegiestów poprzez budowę oświetlenia ulicznego wzdłuŝ drogi
Elementy cyfrowe i układy logiczne
 Elementy cyfrowe i układy logiczne Wykład Legenda Zezwolenie Dekoder, koder Demultiplekser, multiplekser 2 Operacja zezwolenia Przykład: zamodelować podsystem elektroniczny samochodu do sterowania urządzeniami:
Elementy cyfrowe i układy logiczne Wykład Legenda Zezwolenie Dekoder, koder Demultiplekser, multiplekser 2 Operacja zezwolenia Przykład: zamodelować podsystem elektroniczny samochodu do sterowania urządzeniami:
ZAPYTANIE OFERTOWE. Nazwa zamówienia: Wykonanie usług geodezyjnych podziały nieruchomości
 Znak sprawy: GP. 271.3.2014.AK ZAPYTANIE OFERTOWE Nazwa zamówienia: Wykonanie usług geodezyjnych podziały nieruchomości 1. ZAMAWIAJĄCY Zamawiający: Gmina Lubicz Adres: ul. Toruńska 21, 87-162 Lubicz telefon:
Znak sprawy: GP. 271.3.2014.AK ZAPYTANIE OFERTOWE Nazwa zamówienia: Wykonanie usług geodezyjnych podziały nieruchomości 1. ZAMAWIAJĄCY Zamawiający: Gmina Lubicz Adres: ul. Toruńska 21, 87-162 Lubicz telefon:
Procedura uzyskiwania awansu zawodowego na stopień nauczyciela mianowanego przez nauczycieli szkół i placówek
 Data publikacji : 10.01.2011 Procedura uzyskiwania awansu zawodowego na stopień nauczyciela mianowanego przez nauczycieli szkół i placówek Procedura uzyskiwania awansu zawodowego na stopień nauczyciela
Data publikacji : 10.01.2011 Procedura uzyskiwania awansu zawodowego na stopień nauczyciela mianowanego przez nauczycieli szkół i placówek Procedura uzyskiwania awansu zawodowego na stopień nauczyciela
MODELOWANIE SERWOMECHANIZMU HYDRAULICZNEGO NA MASZYNIE CYFROWEJ. 1. Wprowadzenie
 MECHANIKA TEORETYCZNA I STOSOWANA 1/2, 25, 1987 MODELOWANIE SERWOMECHANIZMU HYDRAULICZNEGO NA MASZYNIE CYFROWEJ WŁADYSŁAW JAROMINEK Polska Akademia Nauk, Warszawa TADEUSZ STEFAŃ SKI Politechnika Ś wię
MECHANIKA TEORETYCZNA I STOSOWANA 1/2, 25, 1987 MODELOWANIE SERWOMECHANIZMU HYDRAULICZNEGO NA MASZYNIE CYFROWEJ WŁADYSŁAW JAROMINEK Polska Akademia Nauk, Warszawa TADEUSZ STEFAŃ SKI Politechnika Ś wię
dyfuzja w płynie nieruchomym (lub w ruchu laminarnym) prowadzi do wzrostu chmury zanieczyszczenia
 prowadzi do wzrostu chmury zanieczyszczenia") 6. Dyspersja i adwekcja w przepływie urbulennym podsumowanie własności laminarnej (molekularnej) dyfuzji: ciągły ruch molekuł (molekularne wymuszenie) prowadzi do losowego błądzenia cząsek zanieczyszczeń
6. Dyspersja i adwekcja w przepływie urbulennym podsumowanie własności laminarnej (molekularnej) dyfuzji: ciągły ruch molekuł (molekularne wymuszenie) prowadzi do losowego błądzenia cząsek zanieczyszczeń
PAKIET MathCad - Część III
 Opracowanie: Anna Kluźniak / Jadwiga Matla Ćw3.mcd 1/12 Katedra Informatyki Stosowanej - Studium Podstaw Informatyki PAKIET MathCad - Część III RÓWNANIA I UKŁADY RÓWNAŃ 1. Równania z jedną niewiadomą MathCad
Opracowanie: Anna Kluźniak / Jadwiga Matla Ćw3.mcd 1/12 Katedra Informatyki Stosowanej - Studium Podstaw Informatyki PAKIET MathCad - Część III RÓWNANIA I UKŁADY RÓWNAŃ 1. Równania z jedną niewiadomą MathCad
Wiedza niepewna i wnioskowanie (c.d.)
") Wiedza niepewna i wnioskowanie (c.d.) Dariusz Banasiak Katedra Informatyki Technicznej Wydział Elektroniki Wnioskowanie przybliżone Wnioskowanie w logice tradycyjnej (dwuwartościowej) polega na stwierdzeniu
Wiedza niepewna i wnioskowanie (c.d.) Dariusz Banasiak Katedra Informatyki Technicznej Wydział Elektroniki Wnioskowanie przybliżone Wnioskowanie w logice tradycyjnej (dwuwartościowej) polega na stwierdzeniu
Ć W I C Z E N I E 5. Częstotliwość graniczna
 36 Ć W I Z E N I E 5 PASYWNE FILTY ZĘSTOTLIWOŚI. WIADOMOŚI OGÓLNE Filtrem częstotliwości nazywamy układ o strukturze czwórnika (czwórnik to układ mający cztery zaciski jedna z par zacisków pełni rolę wejścia,
36 Ć W I Z E N I E 5 PASYWNE FILTY ZĘSTOTLIWOŚI. WIADOMOŚI OGÓLNE Filtrem częstotliwości nazywamy układ o strukturze czwórnika (czwórnik to układ mający cztery zaciski jedna z par zacisków pełni rolę wejścia,
7. REZONANS W OBWODACH ELEKTRYCZNYCH
 OBWODY SYGNAŁY 7. EZONANS W OBWODAH EEKTYZNYH 7.. ZJAWSKO EZONANS Obwody elektryczne, w których występuje zjawisko rezonansu nazywane są obwodami rezonansowymi lub drgającymi. ozpatrując bezźródłowy obwód
OBWODY SYGNAŁY 7. EZONANS W OBWODAH EEKTYZNYH 7.. ZJAWSKO EZONANS Obwody elektryczne, w których występuje zjawisko rezonansu nazywane są obwodami rezonansowymi lub drgającymi. ozpatrując bezźródłowy obwód
SPECYFIKACJA ISTOTNYCH WARUNKÓW ZAMÓWIENIA DOTYCZĄCA POSTĘPOWANIA CZĄSTKOWEGO O UDZIELENIE ZAMÓWIENIA PUBLICZNEGO
 ODDZIAŁ TERENOWY W SZCZECINIE FILIA W KOSZALINIE SPECYFIKACJA ISTOTNYCH WARUNKÓW ZAMÓWIENIA DOTYCZĄCA POSTĘPOWANIA CZĄSTKOWEGO O UDZIELENIE ZAMÓWIENIA PUBLICZNEGO na: " Zawarcie umów cząstkowych na usługi
ODDZIAŁ TERENOWY W SZCZECINIE FILIA W KOSZALINIE SPECYFIKACJA ISTOTNYCH WARUNKÓW ZAMÓWIENIA DOTYCZĄCA POSTĘPOWANIA CZĄSTKOWEGO O UDZIELENIE ZAMÓWIENIA PUBLICZNEGO na: " Zawarcie umów cząstkowych na usługi
Warszawa, dnia 11 marca 2016 r. Poz. 327 ROZPORZĄDZENIE. z dnia 7 marca 2016 r.
 DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 11 marca 2016 r. Poz. 327 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY I Budownictwa 1) z dnia 7 marca 2016 r. w sprawie numeru ewidencyjnego ośrodka szkolenia
DZIENNIK USTAW RZECZYPOSPOLITEJ POLSKIEJ Warszawa, dnia 11 marca 2016 r. Poz. 327 ROZPORZĄDZENIE MINISTRA INFRASTRUKTURY I Budownictwa 1) z dnia 7 marca 2016 r. w sprawie numeru ewidencyjnego ośrodka szkolenia
3 Podstawy teorii drgań układów o skupionych masach
 3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
3 Podstawy teorii drgań układów o skupionych masach 3.1 Drgania układu o jednym stopniu swobody Rozpatrzmy elementarny układ drgający, nazywany też oscylatorem harmonicznym, składający się ze sprężyny
LXV OLIMPIADA FIZYCZNA ZAWODY III STOPNIA
 LXV OLIMPIADA FIZYCZNA ZAWODY III STOPNIA CZ DO WIADCZALNA Za zadanie do±wiadczalne mo»na otrzyma maksymalnie 40 punktów. Zadanie D. Rozgrzane wolframowe wªókno»arówki o temperaturze bezwzgl dnej T emituje
LXV OLIMPIADA FIZYCZNA ZAWODY III STOPNIA CZ DO WIADCZALNA Za zadanie do±wiadczalne mo»na otrzyma maksymalnie 40 punktów. Zadanie D. Rozgrzane wolframowe wªókno»arówki o temperaturze bezwzgl dnej T emituje
CYFROWY WYŚWIETLACZ POŁOŻENIA TNP 10
 TOCK - AUTOMATYKA s.c. AUTORYZOWANY DEALER FIRMY ISKRA - TELA 15-384 BIAŁYSTOK UL. KS ABPA E. KISIELA 28 TEL/FAX (0 85) 661 61 21, 66 11 011 CYFROWY WYŚWIETLACZ POŁOŻENIA TNP 10 INSTRUKCJA OBSŁUGI Wszelkie
TOCK - AUTOMATYKA s.c. AUTORYZOWANY DEALER FIRMY ISKRA - TELA 15-384 BIAŁYSTOK UL. KS ABPA E. KISIELA 28 TEL/FAX (0 85) 661 61 21, 66 11 011 CYFROWY WYŚWIETLACZ POŁOŻENIA TNP 10 INSTRUKCJA OBSŁUGI Wszelkie
PRÓG RENTOWNOŚCI i PRÓG
 PRÓG RENTOWNOŚCI i PRÓG WYPŁACALNOŚCI (MB) Próg rentowności (BP) i margines bezpieczeństwa Przychody Przychody Koszty Koszty całkowite Koszty stałe Koszty zmienne BP Q MB Produkcja gdzie: BP próg rentowności
PRÓG RENTOWNOŚCI i PRÓG WYPŁACALNOŚCI (MB) Próg rentowności (BP) i margines bezpieczeństwa Przychody Przychody Koszty Koszty całkowite Koszty stałe Koszty zmienne BP Q MB Produkcja gdzie: BP próg rentowności
PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI
 ARKUSZ 0 MATURA 00 PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Instrukcja dla zdajàcego POZIOM PODSTAWOWY Czas pracy: 70 minut. Sprawdê, czy arkusz zawiera stron.. W zadaniach od. do 5. sà podane 4 odpowiedzi:
ARKUSZ 0 MATURA 00 PRZYK ADOWY ARKUSZ EGZAMINACYJNY Z MATEMATYKI Instrukcja dla zdajàcego POZIOM PODSTAWOWY Czas pracy: 70 minut. Sprawdê, czy arkusz zawiera stron.. W zadaniach od. do 5. sà podane 4 odpowiedzi:
Regulamin Projektów Ogólnopolskich i Komitetów Stowarzyszenia ESN Polska
 Regulamin Projektów Ogólnopolskich i Komitetów Stowarzyszenia ESN Polska 1 Projekt Ogólnopolski: 1.1. Projekt Ogólnopolski (dalej Projekt ) to przedsięwzięcie Stowarzyszenia podjęte w celu realizacji celów
Regulamin Projektów Ogólnopolskich i Komitetów Stowarzyszenia ESN Polska 1 Projekt Ogólnopolski: 1.1. Projekt Ogólnopolski (dalej Projekt ) to przedsięwzięcie Stowarzyszenia podjęte w celu realizacji celów
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Zarządzenie Nr 325/09 Burmistrza Miasta Bielsk Podlaski z dnia 29 czerwca 2009 r.
 Zarządzenie Nr 325/09 Burmistrza Miasta Bielsk Podlaski z dnia 29 czerwca 2009 r. w sprawie wprowadzenia w Urzędzie Miasta Bielsk Podlaski regulaminu okresowej oceny pracowników Na podstawie art. 28 ustawy
Zarządzenie Nr 325/09 Burmistrza Miasta Bielsk Podlaski z dnia 29 czerwca 2009 r. w sprawie wprowadzenia w Urzędzie Miasta Bielsk Podlaski regulaminu okresowej oceny pracowników Na podstawie art. 28 ustawy
TABELA ZGODNOŚCI. W aktualnym stanie prawnym pracodawca, który przez okres 36 miesięcy zatrudni osoby. l. Pornoc na rekompensatę dodatkowych
 -...~.. TABELA ZGODNOŚCI Rozporządzenie Komisji (UE) nr 651/2014 z dnia 17 czerwca 2014 r. uznające niektóre rodzaje pomocy za zgodne z rynkiem wewnętrznym w zastosowaniu art. 107 i 108 Traktatu (Dz. Urz.
-...~.. TABELA ZGODNOŚCI Rozporządzenie Komisji (UE) nr 651/2014 z dnia 17 czerwca 2014 r. uznające niektóre rodzaje pomocy za zgodne z rynkiem wewnętrznym w zastosowaniu art. 107 i 108 Traktatu (Dz. Urz.
TADEUSZ MIKO AJCZYK Wydzia Mechaniczny, Uniwersytet Technologiczno-Przyrodniczy, Bydgoszcz
 TADEUSZ MIKO AJCZYK Wydzia Mechaniczny, Uniwersytet Technologiczno-Przyrodniczy, Bydgoszcz Metodyka opracowania narz dzia o elastyczno ci geometryczno-kinematycznej W pracy przedstawiono metodyk opracowania
TADEUSZ MIKO AJCZYK Wydzia Mechaniczny, Uniwersytet Technologiczno-Przyrodniczy, Bydgoszcz Metodyka opracowania narz dzia o elastyczno ci geometryczno-kinematycznej W pracy przedstawiono metodyk opracowania
INFORMACJA DOTYCZĄCA DZIAŁALNOŚ TOWARZYSTW FUNDUSZY INWESTYCYJNYCH W 2004 ROKU
 KOMISJA PAPIERÓW WARTOŚCIOWYCH I GIEŁD DEPARTAMENT FUNDUSZY INWESTYCYJNYCH INFORMACJA DOTYCZĄCA DZIAŁALNOŚ CI TOWARZYSTW FUNDUSZY INWESTYCYJNYCH W 2004 ROKU WARSZAWA, DNIA 25.04.2005 R. strona 1 /9 WSTĘP
KOMISJA PAPIERÓW WARTOŚCIOWYCH I GIEŁD DEPARTAMENT FUNDUSZY INWESTYCYJNYCH INFORMACJA DOTYCZĄCA DZIAŁALNOŚ CI TOWARZYSTW FUNDUSZY INWESTYCYJNYCH W 2004 ROKU WARSZAWA, DNIA 25.04.2005 R. strona 1 /9 WSTĘP
Umowa o pracę zawarta na czas nieokreślony
 Umowa o pracę zawarta na czas nieokreślony Uwagi ogólne Definicja umowy Umowa o pracę stanowi dokument stwierdzający zatrudnienie w ramach stosunku pracy. Według ustawowej definicji jest to zgodne oświadczenie
Umowa o pracę zawarta na czas nieokreślony Uwagi ogólne Definicja umowy Umowa o pracę stanowi dokument stwierdzający zatrudnienie w ramach stosunku pracy. Według ustawowej definicji jest to zgodne oświadczenie
Projekt MES. Wykonali: Lidia Orkowska Mateusz Wróbel Adam Wysocki WBMIZ, MIBM, IMe
 Projekt MES Wykonali: Lidia Orkowska Mateusz Wróbel Adam Wysocki WBMIZ, MIBM, IMe 1. Ugięcie wieszaka pod wpływem przyłożonego obciążenia 1.1. Wstęp Analizie poddane zostało ugięcie wieszaka na ubrania
Projekt MES Wykonali: Lidia Orkowska Mateusz Wróbel Adam Wysocki WBMIZ, MIBM, IMe 1. Ugięcie wieszaka pod wpływem przyłożonego obciążenia 1.1. Wstęp Analizie poddane zostało ugięcie wieszaka na ubrania