Bezzałogowy samolot rozpoznawczy Mikro BSP
|
|
|
- Juliusz Skrzypczak
- 6 lat temu
- Przeglądów:
Transkrypt

1 Bezzałogowy samolot rozpoznawczy Mikro BSP Konrad Warnicki Tomasz Wnuk Opiekun pracy: dr. Andrzej Ignaczak Kierownik pracy: dr. Ryszard Kossowski

2 Projekt bezzałogowego samolotu rozpoznawczego Konsorcjum: -Centrum Naukowo-Produkcyjne Elektroniki Profesjonalnej RADWAR S.A. -Instytut Techniczny Wojsk Lotniczych -Wojskowa Akademia Techniczna Projekt dla Wojska Polskiego, jako alternatywa do zagranicznych odpowiedników.
 Ochrona obszarowa, dozór")
3 Typowe zastosowania demonstratora: Działania w terenie zabudowanym Rozpoznanie ponad przeszkodą terenową Patrol zwiadowczy (wysunięte posterunki obserwacyjne) Ochrona obszarowa, dozór obiektów
4 Demonstrator systemu będzie spełniał rolę miniaturowego systemu rozpoznania Skład systemu: Bezpilotowy środek latający Stacja naziemna Zasadnicze zadania systemu: Przekazywanie w czasie rzeczywistym (lub prawie-rzeczywistym danych z sensorów pokładowych środka bezpilotowego do stacji naziemnej Zobrazowanie danych z sensorów w stacji naziemnej Rozpoznanie i zdefiniowanie obiektów charakterystycznych oraz określenie ich współrzędnych i dowiązanie do terenu, Przesyłanie w ustalonej postaci informacji do systemu dowodzenia
5 URZĄDZENIA POKŁADOWE AUTOPILOT RS232 MODUŁ ŁĄCZNOŚCI DANE STABILIZATOR KAMERA FILMOWA Wizja_analog MODUŁ ŁĄCZNOŚCI WIZJI MODUŁ ŁĄCZNOŚCI WIZJI MODUŁ ŁĄCZNOŚCI DANE KOMPUTER PC 2 (SAD2) Ethernet Wizja_analog RS232 Ethernet RS KOMPUTER PC 1 (SAD1) URZĄDZENIA NAZIEMNE
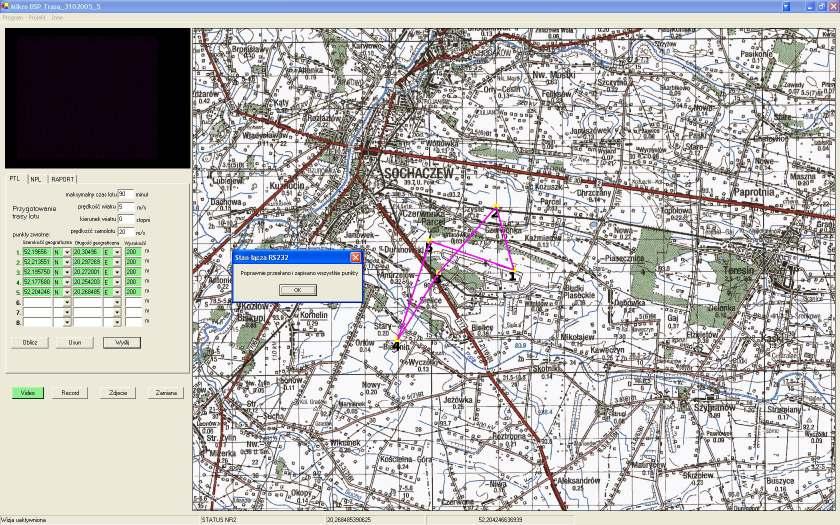
6 Główne wymagania Graficzne planowanie trasy oraz programowanie autopilota Wyświetlanie i zapisywanie aktualnej wizji z samolotu Zobrazowanie faktycznej trasy samolotu Przechwytywanie poszczególnych klatek przekazywanych z samolotu w celu ich dalszej analizy. Określanie położenia geograficznego obiektów wskazanych na zdjęciu. Wyświetlanie położenia obiektów na mapie
7 Działanie 1. (SAD1) Planowanie misji oraz transmisja do planu do samolotu 2. (SAD1) Określenie trasy, konfiguracja, rozpoczęcie misji 3. (SAD1) Rozpoczęcie wyświetlania obrazu z samolotu 4. Wybrane klatki przechwycone na SAD1 są przekazywane do SAD2 w celu dalszej obróbki 5. (SAD2) Dla wskazanych obiektów na zdjęciu obliczane są współrzędne geograficzne 6. (SAD2) Przekazanie danych do innych systemów wojskowych
8 Komputer PC1 (SAD1) przeznaczony jest do: Przygotowania planu lotu modelu BSL Prezentowania w trybie on-line na mapie rastrowej aktualnego położenia modelu Wyświetlania aktualnych parametrów lotu modelu BSP Prezentowania w trybie on-line widzianego przez kamerę obszaru terenu (sygnał composite video) Archiwizacji parametrów lotu modelu BSP Przesyłania na żądanie sekwencji wybranych klatek z aktualnymi dla nich danymi o parametrach lotu modelu łączem ethernetowym Odbioru łączem RS danych o parametrach lotu modelu BSP i głowicy Odbioru wizji z kamery umieszczonej w głowicy modelu BSP
9 Komputer PC2 (SAD2) przeznaczony jest do: Odbioru sekwencji wybranych klatek z aktualnymi dla nich danymi o parametrach lotu modelu łączem ethernetowym Zobrazowania poszczególnych klatek z aktualnymi parametrami lotu modelu BSP i ze zorientowaniem geograficznym Wskazywania na zobrazowanej klatce wybranych obiektów z automatycznym określeniem ich położenia Prezentowania aktualnego położenia wybranych obiektów na mapie rastrowej Przygotowania raportu o wykrytych obiektach Przesyłania raportu do stanowiska dowodzenia Archiwizacji przychodzących danych
10
11
12

13 Schemat: Dla weryfikacji obliczeń zostały wykonane testy. Projekt zakończył się sukcesem, został zaakceptowany przez przedstawicieli Wojska Polskiego.

14
15 Czynniki obliczania współrzędnych geograficznych: - Nie dokładność GPS - Czas przetwarzania oraz przesyłania danych lokalizacyjnych -Odchylenie samolotu podczas przechwytywania klatki - Zmienna odległość od ziemii

16

17
18 Pytania?

19
STUDENCKIE KOŁO NAUKOWE CHIP
 STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia
 Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
SYSTEMY WALKI ELEKTRONICZNEJ
 SYSTEMY WALKI ELEKTRONICZNEJ ZAUTOMATYZOWANY SYSTEM ROZPOZNAWCZO-ZAKŁÓCAJĄCY KAKTUS Praca rozwojowa pod nazwą Zautomatyzowany system rozpoznawczo-zakłócający była realizowana przez konsorcjum WIŁ-WAT w
SYSTEMY WALKI ELEKTRONICZNEJ ZAUTOMATYZOWANY SYSTEM ROZPOZNAWCZO-ZAKŁÓCAJĄCY KAKTUS Praca rozwojowa pod nazwą Zautomatyzowany system rozpoznawczo-zakłócający była realizowana przez konsorcjum WIŁ-WAT w
Kompetencje polskiej nauki w zakresie systemów bezzałogowych
 Kompetencje polskiej nauki w zakresie systemów bezzałogowych Wojskowa Akademia Techniczna, Wydział Elektroniki, Instytut Radioelektroniki ul. Gen. Sylwestra Kaliskiego 2, 00-908 Warszawa, Poland Tel.:
Kompetencje polskiej nauki w zakresie systemów bezzałogowych Wojskowa Akademia Techniczna, Wydział Elektroniki, Instytut Radioelektroniki ul. Gen. Sylwestra Kaliskiego 2, 00-908 Warszawa, Poland Tel.:
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]](/thumbs/59/43314735.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]") Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja Cel konkursu
 Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology
 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]](/thumbs/56/39412017.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]") Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu. 20 maja, 2016 R. Krenz 1
 Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, EIK
 dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, e-mail: psamczyn@elka.pw.edu.pl EIK Programowy symulator lotu samolotów i platform bezzałogowych Celem pracy jest opracowanie interfejsów programowych
dr hab. inż. P. Samczyński, prof. PW; pok. 453, tel. 5588, e-mail: psamczyn@elka.pw.edu.pl EIK Programowy symulator lotu samolotów i platform bezzałogowych Celem pracy jest opracowanie interfejsów programowych
Dęblin, dnia r.
 WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. 261 519 464; fax.: 261 517 452 Dęblin, dnia 17.07.2015 r. ZAPYTANIE
WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. 261 519 464; fax.: 261 517 452 Dęblin, dnia 17.07.2015 r. ZAPYTANIE
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF
 DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
dr Mariola Tracz dr Radosław Uliszak Nowe środki dydaktyczne w nauczaniu-uczeniu się przyrody i geografii
 dr Mariola Tracz dr Radosław Uliszak Nowe środki dydaktyczne w nauczaniu-uczeniu się przyrody i geografii Meteorologia automatyzacja pomiarów; pomiar w czasie rzeczywistym; prezentacja danych poprzez WWW;
dr Mariola Tracz dr Radosław Uliszak Nowe środki dydaktyczne w nauczaniu-uczeniu się przyrody i geografii Meteorologia automatyzacja pomiarów; pomiar w czasie rzeczywistym; prezentacja danych poprzez WWW;
Inspekcja wałów przeciwpowodziowych i linii energetycznych przy pomocy BSL
 Instytut Lotnictwa, Stowarzyszenie Bezzałogowych Systemów Latających Konferencja: Bezpieczeństwo użytkowania Bezzałogowych Systemów Latających Inspekcja wałów przeciwpowodziowych i linii energetycznych
Instytut Lotnictwa, Stowarzyszenie Bezzałogowych Systemów Latających Konferencja: Bezpieczeństwo użytkowania Bezzałogowych Systemów Latających Inspekcja wałów przeciwpowodziowych i linii energetycznych
AKCJE POSZUKIWAWCZO - RATOWNICZE
 1 2 3 4 5 6 7 8 9 10 AKCJE POSZUKIWAWCZO - RATOWNICZE ROZPOZNAWANIE ZAGROśEŃ ANALIZA SKAśEŃ PATROLOWANIE OCENA ZAGROśEŃ I ZNISZCZEŃ WSPOMAGANIE DOWODZENIA IDENTYFIKACJA OBIEKTÓW OBSERWACJA WSPOMAGANIE
1 2 3 4 5 6 7 8 9 10 AKCJE POSZUKIWAWCZO - RATOWNICZE ROZPOZNAWANIE ZAGROśEŃ ANALIZA SKAśEŃ PATROLOWANIE OCENA ZAGROśEŃ I ZNISZCZEŃ WSPOMAGANIE DOWODZENIA IDENTYFIKACJA OBIEKTÓW OBSERWACJA WSPOMAGANIE
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Definicja i funkcje Systemów Informacji Geograficznej
 Definicja i funkcje Systemów Informacji Geograficznej Mateusz Malinowski Anna Krakowiak-Bal Kraków 17 marca 2014 r. Systemy Informacji Geograficznej są traktowane jako zautomatyzowana sieć funkcji, czyli
Definicja i funkcje Systemów Informacji Geograficznej Mateusz Malinowski Anna Krakowiak-Bal Kraków 17 marca 2014 r. Systemy Informacji Geograficznej są traktowane jako zautomatyzowana sieć funkcji, czyli
Samoloty bezzałogowe w fotografii lotniczej. wrzesień 2011 r.
 Samoloty bezzałogowe w fotografii lotniczej wrzesień 2011 r. Pokrycie podłużne: ok. 80% Pokrycie poprzeczne: ok. 60-70% Ortomozaika Wymagania dla płatowca Łatwość obsługi przez max 2 osoby Krótki czas
Samoloty bezzałogowe w fotografii lotniczej wrzesień 2011 r. Pokrycie podłużne: ok. 80% Pokrycie poprzeczne: ok. 60-70% Ortomozaika Wymagania dla płatowca Łatwość obsługi przez max 2 osoby Krótki czas
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10
 TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10 Fotogrametria to technika pomiarowa oparta na obrazach fotograficznych. Wykorzystywana jest ona do opracowywani map oraz do różnego rodzaju zadań pomiarowych.
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD 10 Fotogrametria to technika pomiarowa oparta na obrazach fotograficznych. Wykorzystywana jest ona do opracowywani map oraz do różnego rodzaju zadań pomiarowych.
I Konkurs NCBR z obszaru bezpieczeństwa i obronności
 I Konkurs NCBR z obszaru bezpieczeństwa i obronności Projekt: Zwiększenie bezpieczeństwa pożarowego obiektów budowlanych poprzez opracowanie nowoczesnego systemu monitoringu pożarowego na terenie RP Autor:
I Konkurs NCBR z obszaru bezpieczeństwa i obronności Projekt: Zwiększenie bezpieczeństwa pożarowego obiektów budowlanych poprzez opracowanie nowoczesnego systemu monitoringu pożarowego na terenie RP Autor:
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Politechnika Wrocławska
 Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Politechnika Wrocławska Instytut Cybernetyki Technicznej Wizualizacja Danych Sensorycznych Projekt Kompas Elektroniczny Prowadzący: dr inż. Bogdan Kreczmer Wykonali: Tomasz Salamon Paweł Chojnowski Wrocław,
Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 2012 07 08
 BSL-X1 Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 07 08 I. Opis systemu BSL X1 W skład bezzałogowego systemu latającego BSL X1, wchodzą następujące części: stacja
BSL-X1 Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 07 08 I. Opis systemu BSL X1 W skład bezzałogowego systemu latającego BSL X1, wchodzą następujące części: stacja
Satelitarny system optoelektronicznej obserwacji Ziemi
 Opracowanie studium wykonalności dla programu strategicznego na rzecz bezpieczeństwa i obronności państwa pn.: Satelitarny system optoelektronicznej obserwacji Ziemi. dr inż. Marcin SZOŁUCHA Warszawa dnia,
Opracowanie studium wykonalności dla programu strategicznego na rzecz bezpieczeństwa i obronności państwa pn.: Satelitarny system optoelektronicznej obserwacji Ziemi. dr inż. Marcin SZOŁUCHA Warszawa dnia,
wielosensorowy system do wykrywania i neutralizacji dronów
 wielosensorowy system do wykrywania i neutralizacji dronów Koncepcja Skuteczna ochrona Dowolnego obiektu W każdych warunkach pogodowych 1000 m zasięgu (wielkość drona) System skalowalny Wielosensorowy
wielosensorowy system do wykrywania i neutralizacji dronów Koncepcja Skuteczna ochrona Dowolnego obiektu W każdych warunkach pogodowych 1000 m zasięgu (wielkość drona) System skalowalny Wielosensorowy
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
ZINTEGROWANA SIEĆ SENSORÓW JAKO ELEMENT WSPOMAGAJĄCY DZIAŁANIA PKW W OPERACJACH STABILIZACYJNYCH
 ZINTEGROWANA SIEĆ SENSORÓW JAKO ELEMENT WSPOMAGAJĄCY DZIAŁANIA PKW W OPERACJACH STABILIZACYJNYCH mgr inż. Edward GOLAN, mgr inż. Adam KRAŚNIEWSKI, mjr dr inż. Janusz ROMANIK, mgr inż. Paweł SKARŻYŃSKI
ZINTEGROWANA SIEĆ SENSORÓW JAKO ELEMENT WSPOMAGAJĄCY DZIAŁANIA PKW W OPERACJACH STABILIZACYJNYCH mgr inż. Edward GOLAN, mgr inż. Adam KRAŚNIEWSKI, mjr dr inż. Janusz ROMANIK, mgr inż. Paweł SKARŻYŃSKI
NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ
 aut. Maksymilian Dura 25.10.2015 NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ Rosyjska armia chwali się wprowadzaniem do sił zbrojnych nowych systemów uzbrojenia, wliczając w to nie tylko nowe samoloty
aut. Maksymilian Dura 25.10.2015 NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ Rosyjska armia chwali się wprowadzaniem do sił zbrojnych nowych systemów uzbrojenia, wliczając w to nie tylko nowe samoloty
BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012
 BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
PODSYSTEM RADIODOSTĘPU MOBILNEGO ZINTEGROWANEGO WĘZŁA ŁĄCZNOŚCI TURKUS
 PODSYSTEM RADIODOSTĘPU MOBILNEGO ZINTEGROWANEGO WĘZŁA ŁĄCZNOŚCI TURKUS ppłk dr inż. Paweł KANIEWSKI mjr dr inż. Robert URBAN kpt. mgr inż. Kamil WILGUCKI mgr inż. Paweł SKARŻYŃSKI WOJSKOWY INSTYTUT ŁĄCZNOŚCI
PODSYSTEM RADIODOSTĘPU MOBILNEGO ZINTEGROWANEGO WĘZŁA ŁĄCZNOŚCI TURKUS ppłk dr inż. Paweł KANIEWSKI mjr dr inż. Robert URBAN kpt. mgr inż. Kamil WILGUCKI mgr inż. Paweł SKARŻYŃSKI WOJSKOWY INSTYTUT ŁĄCZNOŚCI
Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego. Warszawa, wrzesień 2010 r.
 Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego Warszawa, wrzesień 2010 r. Firma Taxus SI Sp. z o.o. otrzymała wsparcie na prace badawcze i
Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego Warszawa, wrzesień 2010 r. Firma Taxus SI Sp. z o.o. otrzymała wsparcie na prace badawcze i
AUTO-EMAIL SYSTEM. Ted-Electronics, Skoczów, 2008-03-17
 AUTO-EMAIL SYSTEM Ted-Electronics, Skoczów, 2008-03-17 Podstawowe informacje System kontroli pojazdów Technologia lokalizacyjna - GPS Technologia transmisji danych - GPRS Monitorowanie pracy pojazdu System
AUTO-EMAIL SYSTEM Ted-Electronics, Skoczów, 2008-03-17 Podstawowe informacje System kontroli pojazdów Technologia lokalizacyjna - GPS Technologia transmisji danych - GPRS Monitorowanie pracy pojazdu System
Szczegółowy opis przedmiotu zamówienia
 Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Oprogramowanie wizualizujące loty fotogrametryczne w projekcie HESOFF. 24/03/2015, Instytut Lotnictwa
 Oprogramowanie wizualizujące loty fotogrametryczne w projekcie HESOFF Jan Kotlarz 24/03/2015, Instytut Lotnictwa SCHEMAT PRZESYŁANIA DANYCH Zdjęcia pozyskane przez Platformę Wielosensorową Quercus Oprogramowanie
Oprogramowanie wizualizujące loty fotogrametryczne w projekcie HESOFF Jan Kotlarz 24/03/2015, Instytut Lotnictwa SCHEMAT PRZESYŁANIA DANYCH Zdjęcia pozyskane przez Platformę Wielosensorową Quercus Oprogramowanie
Rejestrator czasu pracy z foto-rejestracją
 Rejestrator czasu pracy z foto-rejestracją Instrukcja użytkownika Zakład Inżynierii Elektronicznej Andrzej Mączyński Zaroślak 2/8 80-811 Gdańsk, Polska tel.: +48 58 303 71 95 kom.: +48 691 399 973 www:
Rejestrator czasu pracy z foto-rejestracją Instrukcja użytkownika Zakład Inżynierii Elektronicznej Andrzej Mączyński Zaroślak 2/8 80-811 Gdańsk, Polska tel.: +48 58 303 71 95 kom.: +48 691 399 973 www:
Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
 Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
Wydział Elektroniki, Telekomunikacji i Informatyki Politechniki Gdańskiej Katedra Systemów Elektroniki Morskiej Stacja Badań Hydroakustycznych Urządzenia Elektroniki Morskiej Systemy Elektroniki Morskiej
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE
 PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
GE Security. Alliance. zaawansowany system zarządzania bezpieczeństwem
 GE Security Alliance zaawansowany system zarządzania bezpieczeństwem Podstawowe cechy systemu Alliance: Aplikacja wielostanowiskowa maksymalnie 1 serwer + 9 stacji klienckich Umożliwia jednoczesną pracę
GE Security Alliance zaawansowany system zarządzania bezpieczeństwem Podstawowe cechy systemu Alliance: Aplikacja wielostanowiskowa maksymalnie 1 serwer + 9 stacji klienckich Umożliwia jednoczesną pracę
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku
 kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA
 BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Mobilny system dowodzenia, obserwacji, rozpoznania i łączności
 1.30 1.71 Projekt rozwojowy nr O R00 0008 11 finansowany przez NCBiR pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności 23.11.2012, Gdańsk Informacje podstawowe XI konkurs na finansowanie
1.30 1.71 Projekt rozwojowy nr O R00 0008 11 finansowany przez NCBiR pt.: Mobilny system dowodzenia, obserwacji, rozpoznania i łączności 23.11.2012, Gdańsk Informacje podstawowe XI konkurs na finansowanie
DECYZJA Nr 369/MON MINISTRA OBRONY NARODOWEJ. z dnia 3 grudnia 2004 r.
 Generalny Zarząd Logistyki P4 183 DECYZJA Nr 369/MON MINISTRA OBRONY NARODOWEJ z dnia 3 grudnia 2004 r. zmieniająca decyzję w sprawie określenia funkcji gestorów, centralnych organów logistycznych, a także
Generalny Zarząd Logistyki P4 183 DECYZJA Nr 369/MON MINISTRA OBRONY NARODOWEJ z dnia 3 grudnia 2004 r. zmieniająca decyzję w sprawie określenia funkcji gestorów, centralnych organów logistycznych, a także
KARTA KRYTERIÓW III KLASY KWALIFIKACYJNEJ
 Załącznik 1 KARTA KRYTERIÓW III KLASY KWALIFIKACYJNEJ DLA SZEREGOWYCH ZAKRES WIEDZY TEORETYCZNEJ ZAKRES UMIEJĘTNOŚCI PRAKTYCZNYCH TAKTYKA zasady prowadzenia działań taktycznych, zasady działania w rejonie
Załącznik 1 KARTA KRYTERIÓW III KLASY KWALIFIKACYJNEJ DLA SZEREGOWYCH ZAKRES WIEDZY TEORETYCZNEJ ZAKRES UMIEJĘTNOŚCI PRAKTYCZNYCH TAKTYKA zasady prowadzenia działań taktycznych, zasady działania w rejonie
IDEA. Integracja różnorodnych podmiotów. Budowa wspólnego stanowiska w dyskursie publicznym. Elastyczność i szybkość działania
 Integracja różnorodnych podmiotów Budowa wspólnego stanowiska w dyskursie publicznym Elastyczność i szybkość działania IDEA Platforma współpracy/ networking Wsparcie rozwoju Niezależność badawcza, technologiczna
Integracja różnorodnych podmiotów Budowa wspólnego stanowiska w dyskursie publicznym Elastyczność i szybkość działania IDEA Platforma współpracy/ networking Wsparcie rozwoju Niezależność badawcza, technologiczna
Naziemna stacja kontroli lotu GCS 1
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF. Mariusz Kacprzak, Konrad Wodziński
 Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Zasady funkcjonowania urządzeń SIP-TRISTAR
 Załącznik nr 14 do umowy nr... z dnia. Zasady funkcjonowania urządzeń SIP-TRISTAR 1. Ogólne zasady 1.1. Zapisy niniejszego załącznika dotyczą pojazdów, które spełniają zapisy załącznika nr 3a i 3 oraz
Załącznik nr 14 do umowy nr... z dnia. Zasady funkcjonowania urządzeń SIP-TRISTAR 1. Ogólne zasady 1.1. Zapisy niniejszego załącznika dotyczą pojazdów, które spełniają zapisy załącznika nr 3a i 3 oraz
JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA
 UAV BIRDIE JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany
UAV BIRDIE JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany
ZAŁĄCZNIK NR 1 DO SIWZ
 2 REGIONALNA BAZA LOGISTYCZNA 04-470 Warszawa, ul. Marsa 110 ZAŁĄCZNIK NR 1 DO SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA 1. Przedmiot zamówienia : Bezzałogowy Statek Powietrzny (BSP) 2. Ilość: 4 szt. 3. CPV: 34711200-6
2 REGIONALNA BAZA LOGISTYCZNA 04-470 Warszawa, ul. Marsa 110 ZAŁĄCZNIK NR 1 DO SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA 1. Przedmiot zamówienia : Bezzałogowy Statek Powietrzny (BSP) 2. Ilość: 4 szt. 3. CPV: 34711200-6
POLITECHNIKA WARSZAWSKA
 POLITECHNIKA WARSZAWSKA Uczelniane Wybrane prace badawczo rozwojowe realizowane w Politechnice Warszawskiej w zakresie technologii bezpilotowych obiektów latających Prof. dr hab. inż. Janusz Narkiewicz
POLITECHNIKA WARSZAWSKA Uczelniane Wybrane prace badawczo rozwojowe realizowane w Politechnice Warszawskiej w zakresie technologii bezpilotowych obiektów latających Prof. dr hab. inż. Janusz Narkiewicz
Opis elementów ekranu OSD by Pitlab&Zbig
 Opis elementów ekranu OSD by Pitlab&Zbig Rysunek 1 przykładowy układ ekranu OSD. Rozmieszczenie elementów na ekranie dla dwóch własnych ekranów może być dowolnie modyfikowane, każdy element może być pokazany
Opis elementów ekranu OSD by Pitlab&Zbig Rysunek 1 przykładowy układ ekranu OSD. Rozmieszczenie elementów na ekranie dla dwóch własnych ekranów może być dowolnie modyfikowane, każdy element może być pokazany
Szkolenie Fotogrametria niskiego pułapu
 Oprogramowanie: Pix4Dmapper Koszt szkolenia (netto): 2 700 ZŁ Poziom: ŚREDNIO ZAAWANSOWANY Czas trwania: 3 DNI ul. Wadowicka 8a tel. 12 200-22-28 e-mail: www.navigate.pl 30-415 Kraków wew. 109 szkolenia@navigate.pl
Oprogramowanie: Pix4Dmapper Koszt szkolenia (netto): 2 700 ZŁ Poziom: ŚREDNIO ZAAWANSOWANY Czas trwania: 3 DNI ul. Wadowicka 8a tel. 12 200-22-28 e-mail: www.navigate.pl 30-415 Kraków wew. 109 szkolenia@navigate.pl
Sprawozdanie z realizacji projektu:
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
Kraków, dn ZAPYTANIE OFERTOWE (data i podpis)
") Kraków, dn. 18.06.2019 ZAPYTANIE OFERTOWE Simpro sp. z o.o. zaprasza do składania ofert na dostawę sprzętu - dwie platformy UAV płatowiec i wielowirnikowiec, wg wymagań zawartych w załączonym Opisie Przedmiotu
Kraków, dn. 18.06.2019 ZAPYTANIE OFERTOWE Simpro sp. z o.o. zaprasza do składania ofert na dostawę sprzętu - dwie platformy UAV płatowiec i wielowirnikowiec, wg wymagań zawartych w załączonym Opisie Przedmiotu
MULTIPRON_Advance. Multiportowy tester łączy Ethernet, E1 i RS232/485. MULTIPRON_Advance. 1. Testy Ethernet
 MULTIPRON_Advance Multiportowy tester łączy Ethernet, E1 i RS232/485 MULTIPRON_Advance Dwa interfejsy Gigabit Ethernet (2x RJ45, 2x SFP) Analiza ruchu na portach elektrycznych i optycznych (SFP) Ethernet,
MULTIPRON_Advance Multiportowy tester łączy Ethernet, E1 i RS232/485 MULTIPRON_Advance Dwa interfejsy Gigabit Ethernet (2x RJ45, 2x SFP) Analiza ruchu na portach elektrycznych i optycznych (SFP) Ethernet,
Infrastruktura drogowa
 Infrastruktura drogowa Utrzymanie dróg Strona 1 ERGO zapewnia kompleksową obsługę procesów związanych z utrzymaniem krótkoterminowym i długoterminowym dróg. Podstawą obsługi tych procesów są dane ewidencji
Infrastruktura drogowa Utrzymanie dróg Strona 1 ERGO zapewnia kompleksową obsługę procesów związanych z utrzymaniem krótkoterminowym i długoterminowym dróg. Podstawą obsługi tych procesów są dane ewidencji
Wybrane zastosowania bezzałogowych statków latających (BSL) w inżynierii środowiska. Rok akademicki: 2016/2017 Kod: DIS IK-n Punkty ECTS: 3
 w inżynierii środowiska. Rok akademicki: 2016/2017 Kod: DIS IK-n Punkty ECTS: 3") Nazwa modułu: Wybrane zastosowania latających (BSL) w inżynierii środowiska Rok akademicki: 2016/2017 Kod: DIS-2-424-IK-n Punkty ECTS: 3 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Inżynieria
Nazwa modułu: Wybrane zastosowania latających (BSL) w inżynierii środowiska Rok akademicki: 2016/2017 Kod: DIS-2-424-IK-n Punkty ECTS: 3 Wydział: Geodezji Górniczej i Inżynierii Środowiska Kierunek: Inżynieria
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Sprawdzian test egzaminacyjny 2 GRUPA I
 ... nazwisko i imię ucznia Sprawdzian test egzaminacyjny 2 GRUPA I 1. Na rys. 1 procesor oznaczony jest numerem A. 2 B. 3 C. 5 D. 8 2. Na rys. 1 karta rozszerzeń oznaczona jest numerem A. 1 B. 4 C. 6 D.
... nazwisko i imię ucznia Sprawdzian test egzaminacyjny 2 GRUPA I 1. Na rys. 1 procesor oznaczony jest numerem A. 2 B. 3 C. 5 D. 8 2. Na rys. 1 karta rozszerzeń oznaczona jest numerem A. 1 B. 4 C. 6 D.
Robocza baza danych obiektów przestrzennych
 Dolnośląski Wojewódzki Inspektor Nadzoru Geodezyjnego i Kartograficznego Robocza baza danych obiektów przestrzennych Autor: Wilkosz Justyna starszy specjalista Szkolenie Powiatowej Służby Geodezyjnej i
Dolnośląski Wojewódzki Inspektor Nadzoru Geodezyjnego i Kartograficznego Robocza baza danych obiektów przestrzennych Autor: Wilkosz Justyna starszy specjalista Szkolenie Powiatowej Służby Geodezyjnej i
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX
 TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX to technika pomiarowa oparta na obrazach fotograficznych. Taki obraz uzyskiwany jest dzięki wykorzystaniu kamery lub aparatu. Obraz powstaje na specjalnym
TELEDETEKCJA Z ELEMENTAMI FOTOGRAMETRII WYKŁAD IX to technika pomiarowa oparta na obrazach fotograficznych. Taki obraz uzyskiwany jest dzięki wykorzystaniu kamery lub aparatu. Obraz powstaje na specjalnym
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE
 WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
nowoczesnych technologii
 w przestworzach nowoczesnych technologii BSP - Bezzałogowe Systemy Powietrzne Bezzałogowe jednostki latające to urządzenia, które nie wymagają do lotu załogi obecnej na pokładzie oraz nie posiadają możliwości
w przestworzach nowoczesnych technologii BSP - Bezzałogowe Systemy Powietrzne Bezzałogowe jednostki latające to urządzenia, które nie wymagają do lotu załogi obecnej na pokładzie oraz nie posiadają możliwości
Funkcjonalność Modułu Zobrazowania Operacyjnego WAZkA COP.
 Funkcjonalność Modułu Zobrazowania Operacyjnego WAZkA COP. Zbiór usług zarządzania warstwami i obiektami geograficznymi na rzecz narzędzi zarządzania kryzysowego. Przedstawia: ppłk dr inż. Mariusz CHMIELEWSKI
Funkcjonalność Modułu Zobrazowania Operacyjnego WAZkA COP. Zbiór usług zarządzania warstwami i obiektami geograficznymi na rzecz narzędzi zarządzania kryzysowego. Przedstawia: ppłk dr inż. Mariusz CHMIELEWSKI
Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych
 Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych Współdziałanie inżynierów budownictwa i geodezji w procesie budowlanym" inż. Paweł Wójcik tel. 697 152
Wykorzystanie Bezzałogowych Statków Latających w różnych zastosowaniach budowalnych i geodezyjnych Współdziałanie inżynierów budownictwa i geodezji w procesie budowlanym" inż. Paweł Wójcik tel. 697 152
ScrappiX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
ScrappiX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Scrappix jest innowacyjnym urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni przedmiotów okrągłych
BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH
 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology ZASTĘPCA DYREKTORA ITWL PROF. DR HAB. INŻ. ANDRZEJ ŻYLUK BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH May 16, 2016 POLSKIE OŚRODKI
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology ZASTĘPCA DYREKTORA ITWL PROF. DR HAB. INŻ. ANDRZEJ ŻYLUK BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH May 16, 2016 POLSKIE OŚRODKI
WYKORZYSTANIE GIS W SERWISIE INTERNETOWYM SAMORZĄDU WOJEWÓDZTWA MAŁOPOLSKIEGO
 WYKORZYSTANIE GIS W SERWISIE INTERNETOWYM SAMORZĄDU WOJEWÓDZTWA MAŁOPOLSKIEGO Andrzej Sasuła Wicemarszałek Województwa Małopolskiego Warszawa, 30.11.2005 r. http://www.malopolska.pl to adres serwisu Internetowego
WYKORZYSTANIE GIS W SERWISIE INTERNETOWYM SAMORZĄDU WOJEWÓDZTWA MAŁOPOLSKIEGO Andrzej Sasuła Wicemarszałek Województwa Małopolskiego Warszawa, 30.11.2005 r. http://www.malopolska.pl to adres serwisu Internetowego
PREZENTACJA SAMOLOTU E 3A AWACS
 PREZENTACJA SAMOLOTU E 3A AWACS 10 marca 2009 roku 1. Baza Lotnicza Wojskowy Port Lotniczy Warszawa Okęcie Samolot E 3 AWACS Samoloty dalekiego wykrywania i śledzenia E 3/A AWACS są zmodyfikowaną wersją
PREZENTACJA SAMOLOTU E 3A AWACS 10 marca 2009 roku 1. Baza Lotnicza Wojskowy Port Lotniczy Warszawa Okęcie Samolot E 3 AWACS Samoloty dalekiego wykrywania i śledzenia E 3/A AWACS są zmodyfikowaną wersją
ODPOWIEDZI NA PYTANIA DO SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA ORAZ ZAWIADOMIENIE O ZMIANIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA
 Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
POLSKA ARMATA 35 MM PO TESTACH. KOLEJNY KROK AMUNICJA PROGRAMOWALNA
 aut. Andrzej Hładij 04.09.2018 POLSKA ARMATA 35 MM PO TESTACH. KOLEJNY KROK AMUNICJA PROGRAMOWALNA Rozwijana przez PIT-RADWAR armata przeciwlotnicza kal. 35 mm przeszła w 2017 roku szereg testów. Kolejne
aut. Andrzej Hładij 04.09.2018 POLSKA ARMATA 35 MM PO TESTACH. KOLEJNY KROK AMUNICJA PROGRAMOWALNA Rozwijana przez PIT-RADWAR armata przeciwlotnicza kal. 35 mm przeszła w 2017 roku szereg testów. Kolejne
System optycznego przekazywania informacji dla osób niewidomych z wykorzystaniem telefonu z systemem operacyjnym Android inż.
 System optycznego przekazywania informacji dla osób niewidomych z wykorzystaniem telefonu z systemem operacyjnym Android inż. Adam Łutkowski Opiekun: dr inż. Piotr Skulimowski Opiekun dodatkowy: mgr inż.
System optycznego przekazywania informacji dla osób niewidomych z wykorzystaniem telefonu z systemem operacyjnym Android inż. Adam Łutkowski Opiekun: dr inż. Piotr Skulimowski Opiekun dodatkowy: mgr inż.
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych. Autor: Tomasz Gluziński
 Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Koło zainteresowań Teleinformatyk XXI wieku
 Koło zainteresowań Teleinformatyk XXI wieku PROJEKT 3 Temat: Aplikacja Interfejsu MS Kinect Imię i nazwisko ucznia: Kamil Kruszniewski Klasa: III TiA Numer z dziennika: 14 Suwałki, Kwiecień 2013 Strona
Koło zainteresowań Teleinformatyk XXI wieku PROJEKT 3 Temat: Aplikacja Interfejsu MS Kinect Imię i nazwisko ucznia: Kamil Kruszniewski Klasa: III TiA Numer z dziennika: 14 Suwałki, Kwiecień 2013 Strona
Samochodowe systemy kontrolno dyspozytorskie GPS
 Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
PhoeniX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 PhoeniX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Phoenix jest najnowszą odmianą naszego urządzenia do wizyjnej kontroli wymiarów, powierzchni przedmiotów okrągłych oraz
PhoeniX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni Phoenix jest najnowszą odmianą naszego urządzenia do wizyjnej kontroli wymiarów, powierzchni przedmiotów okrągłych oraz
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Cel i zakres ćwiczenia
 MIKROMECHANIZMY I MIKRONAPĘDY 2 - laboratorium Ćwiczenie nr 5 Druk 3D oraz charakteryzacja mikrosystemu Cel i zakres ćwiczenia Celem ćwiczenia jest charakteryzacja geometryczna wykonanego w ćwiczeniu 1
MIKROMECHANIZMY I MIKRONAPĘDY 2 - laboratorium Ćwiczenie nr 5 Druk 3D oraz charakteryzacja mikrosystemu Cel i zakres ćwiczenia Celem ćwiczenia jest charakteryzacja geometryczna wykonanego w ćwiczeniu 1
STACJONARNE JEDNOLITE STUDIA MAGISTERSKIE (10 semestrów)
") STACJONARNE JEDNOLITE STUDIA MAGISTERSKIE (10 semestrów) obejmują wiedzę politechniczną z zakresu działalności metrologicznej w resorcie obrony narodowej. Studia mają na celu kształcenie specjalistów
STACJONARNE JEDNOLITE STUDIA MAGISTERSKIE (10 semestrów) obejmują wiedzę politechniczną z zakresu działalności metrologicznej w resorcie obrony narodowej. Studia mają na celu kształcenie specjalistów
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology. Dyrektor ITWL dr hab. inż. Mirosław Kowalski, prof.
 1953-2019 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology Dyrektor ITWL dr hab. inż. Mirosław Kowalski, prof. ITWL Zwierzchnictwo MINISTRA OBRONY NARODOWEJ poprzez Departament Polityki
1953-2019 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology Dyrektor ITWL dr hab. inż. Mirosław Kowalski, prof. ITWL Zwierzchnictwo MINISTRA OBRONY NARODOWEJ poprzez Departament Polityki
MAPY CYFROWE I ICH ZASTOSOWANIE
 MAPY CYFROWE I ICH ZASTOSOWANIE MAPY CYFROWE I ICH ZASTOSOWANIE NYSA, dn. 24.10.2014r. Opracowanie: Marcin Dorecki Wiesław Fościak Mapa zasadnicza rozumie się przez to wielkoskalowe opracowanie kartograficzne,
MAPY CYFROWE I ICH ZASTOSOWANIE MAPY CYFROWE I ICH ZASTOSOWANIE NYSA, dn. 24.10.2014r. Opracowanie: Marcin Dorecki Wiesław Fościak Mapa zasadnicza rozumie się przez to wielkoskalowe opracowanie kartograficzne,
OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI
 OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI fotografia i film produkcja i naprawy dronów www.fotoacc.pl biuro@fotoacc.pl +48 512 233 363 +48 512 233 363 film fotografia Nasza przygoda z projektowaniem oraz
OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI fotografia i film produkcja i naprawy dronów www.fotoacc.pl biuro@fotoacc.pl +48 512 233 363 +48 512 233 363 film fotografia Nasza przygoda z projektowaniem oraz
Karta produktu. EH-Wibro. System monitoringu i diagnostyki drgań
 Karta produktu OPIS DZIAŁANIA Przetworniki drgań, wibracji i prędkości obrotowej są montowane i dobrane według wymogów producenta przekładni. Urządzenia typu EH-O/06/07.xx, które analizują dane z przetworników
Karta produktu OPIS DZIAŁANIA Przetworniki drgań, wibracji i prędkości obrotowej są montowane i dobrane według wymogów producenta przekładni. Urządzenia typu EH-O/06/07.xx, które analizują dane z przetworników
Naziemna stacja kontroli lotu GCS 2
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
SZEFOSTWO GEOGRAFII WOJSKOWEJ GEOGRAFIA WOJSKOWA
 GEOGRAFIA WOJSKOWA 28 kwietnia 2015 r. płk Krzysztof DANILEWICZ WARSZAWA Nowa struktura DOWÓDZTWO GENERALNE RSZ DOWÓDZTWO OPERACYJNE RSZ INSPEKTORAT RODZAJÓW WOJSK INSPEKTORAT WSPARCIA SZ PION OPERACYJNY
GEOGRAFIA WOJSKOWA 28 kwietnia 2015 r. płk Krzysztof DANILEWICZ WARSZAWA Nowa struktura DOWÓDZTWO GENERALNE RSZ DOWÓDZTWO OPERACYJNE RSZ INSPEKTORAT RODZAJÓW WOJSK INSPEKTORAT WSPARCIA SZ PION OPERACYJNY
system kontroli dostępu
 system kontroli dostępu Nowa, rozbudowana funkcjonalność Zalety urządzeń systemu kontroli dostępu ACCO czynią go atrakcyjnym produktem dla firm i instytucji zainteresowanych nadzorem nad przemieszczaniem
system kontroli dostępu Nowa, rozbudowana funkcjonalność Zalety urządzeń systemu kontroli dostępu ACCO czynią go atrakcyjnym produktem dla firm i instytucji zainteresowanych nadzorem nad przemieszczaniem
WIELOLOKATORSKI SYSTEM WIDEODOMOFONOWY CAT5
 WIELOLOKATORSKI SYSTEM WIDEODOMOFONOWY CAT5 FIRMY EURA-TECH O SYSTEMIE Zastosowanie i możliwości systemu Eura Professional CAT5 Zastosowanie System Eura Professional CAT5 jest idealnym rozwiązaniem dla
WIELOLOKATORSKI SYSTEM WIDEODOMOFONOWY CAT5 FIRMY EURA-TECH O SYSTEMIE Zastosowanie i możliwości systemu Eura Professional CAT5 Zastosowanie System Eura Professional CAT5 jest idealnym rozwiązaniem dla
SquezeeX. Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni
 SquezeeX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni SQUEZEEX jest urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni oringów oraz ogólnie rzecz biorąc
SquezeeX Urządzenie do wizyjnej kontroli wymiarów oraz kontroli defektów powierzchni SQUEZEEX jest urządzeniem do kontroli wizyjnej, kontroli wymiarów oraz powierzchni oringów oraz ogólnie rzecz biorąc
WYKORZYSTANIE NOWOCZESNYCH KAMER STANDARDU IEEE1394 DO DETEKCJI ZMIAN W OBSZARACH OBSERWACJI I BADAŃ W SYSTEMACH MACHINE VISION
 kpt. mgr inŝ. Paweł HŁOSTA kpt. mgr inŝ. Dariusz SZABRA Wojskowy Instytut Techniczny Uzbrojenia WYKORZYSTANIE NOWOCZESNYCH KAMER STANDARDU IEEE1394 DO DETEKCJI ZMIAN W OBSZARACH OBSERWACJI I BADAŃ W SYSTEMACH
kpt. mgr inŝ. Paweł HŁOSTA kpt. mgr inŝ. Dariusz SZABRA Wojskowy Instytut Techniczny Uzbrojenia WYKORZYSTANIE NOWOCZESNYCH KAMER STANDARDU IEEE1394 DO DETEKCJI ZMIAN W OBSZARACH OBSERWACJI I BADAŃ W SYSTEMACH
TECHNOLOGIA INFORMACYJNA. forma studiów: studia niestacjonarne. Liczba godzin/tydzień: 1 W, 2 L
 Nazwa przedmiotu: Kierunek: Rodzaj przedmiotu: Kierunkowy, obowiązkowy Rodzaj zajęć: Wyk. Lab. TECHNOLOGIA INFORMACYJNA Inżynieria Materiałowa Poziom studiów: studia I stopnia forma studiów: studia niestacjonarne
Nazwa przedmiotu: Kierunek: Rodzaj przedmiotu: Kierunkowy, obowiązkowy Rodzaj zajęć: Wyk. Lab. TECHNOLOGIA INFORMACYJNA Inżynieria Materiałowa Poziom studiów: studia I stopnia forma studiów: studia niestacjonarne
Przesyłania danych przez protokół TCP/IP
 Przesyłania danych przez protokół TCP/IP PAKIETY Protokół TCP/IP transmituje dane przez sieć, dzieląc je na mniejsze porcje, zwane pakietami. Pakiety są często określane różnymi terminami, w zależności
Przesyłania danych przez protokół TCP/IP PAKIETY Protokół TCP/IP transmituje dane przez sieć, dzieląc je na mniejsze porcje, zwane pakietami. Pakiety są często określane różnymi terminami, w zależności
ZESTAWIENIE FUNKCJI OPROGRAMOWANIE TRIMBLE BUSINESS CENTER
 ZESTAWIENIE FUNKCJI OPROGRAMOWANIE TRIMBLE BUSINESS CENTER Każda edycja Trimble Business Center (TBC) została stworzona, aby obsługiwać zestaw powiązanych ze sobą poleceń: > Viewer (nielicencjonowany):
ZESTAWIENIE FUNKCJI OPROGRAMOWANIE TRIMBLE BUSINESS CENTER Każda edycja Trimble Business Center (TBC) została stworzona, aby obsługiwać zestaw powiązanych ze sobą poleceń: > Viewer (nielicencjonowany):
Komputerowe systemy pomiarowe. Dr Zbigniew Kozioł - wykład Mgr Mariusz Woźny - laboratorium
 Komputerowe systemy pomiarowe Dr Zbigniew Kozioł - wykład Mgr Mariusz Woźny - laboratorium 1 - Cel zajęć - Orientacyjny plan wykładu - Zasady zaliczania przedmiotu - Literatura Klasyfikacja systemów pomiarowych
Komputerowe systemy pomiarowe Dr Zbigniew Kozioł - wykład Mgr Mariusz Woźny - laboratorium 1 - Cel zajęć - Orientacyjny plan wykładu - Zasady zaliczania przedmiotu - Literatura Klasyfikacja systemów pomiarowych
Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy
 Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy Jakub Machnik, Michał Grycman, Mateusz Konieczny Politechnika Śląska, Gliwice, Polska
Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy Jakub Machnik, Michał Grycman, Mateusz Konieczny Politechnika Śląska, Gliwice, Polska
Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę symulatorów proceduralnych klasy PC numer Zp/pn/10/2015
 Dęblin, dnia 23.02.2015 r. Do Wykonawców postepowania numer Zp/pn/10/2015 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę symulatorów proceduralnych klasy PC
Dęblin, dnia 23.02.2015 r. Do Wykonawców postepowania numer Zp/pn/10/2015 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę symulatorów proceduralnych klasy PC