Procesory osadzone ETD I 2 C, I 2 S, Timer, PWM, ARM W
|
|
|
- Jolanta Mazur
- 5 lat temu
- Przeglądów:
Transkrypt



1 Procesory osadzone ETD 7211 I 2 C, I 2 S, Timer, PWM, ARM W
2 Powtórka wiadomości

3 Dane MAM Memory Acceleration Module Zadanie: przyspieszenie dostępu do pamięci FLASH 3 Rdzeń ARM Interfejs adres 15 Pamięć FLASH Bufory Magistrala Local Bus 128 Pamięć RAM szybka Flash cykl zapis/odczyt ~50 ns Przy założeniu, że procesor działa przy 60 MHz, czas dostępu do pamięci to ~16,33 ns 128 bitowa organizacja pamięci odczyt czterech 32-bitowych rozkazów ARM lub osiem 16- bitowych Thumb Data Buffer Prefetch Buffer Branch Tail Buffer
4 Obniżony pobór mocy Układy LPC umożliwiają pracę w trybie obniżonego poboru mocy. Dostępne tryby: IDLE, Power Down, Sleep Mode, Deep Power-Down Mode IDLE Sleep Mode - wyłączony sygnał taktujący rdzeń - główny zegar wyłączony - wyłączony sygnał taktujący pamięć - pętla PLL zostaje automatycznie rozłączona - sygnał zegarowy podłączony do bloków obsługi przerwań - możliwość wznowienia pracy układu za pomocą RTC (działa zegar Hz) - pobór prądu na poziomie ma - pamięć FLASH w stanie podtrzymania - pobór prądu na poziomie µa 4
5 Obniżony pobór mocy Power Down - sygnał zegarowy całkowicie wyłączony Deep Power-Down - po wznowieniu działania, układ PLL oraz dzielniki sygnałów muszą zostać ponownie skonfigurowane - z trybu power down mikrokontroler mogą wyprowadzić jedynie te bloki, które do działania nie wymagają sygnału zegarowego - odłączone zostaje napięcia zasilające interfejsy logiczne - ekstremalnie niski pobór prądu - wznowienie działania: RTC lub RESET zewnętrzny 5


6 Peryferia SPI Serial Peripheral Interface - na przykładzie LPC2368 Parametry transmisji SPI: Brak arbitrażu, Dwukierunkowy interfejs, 4 linie kontrolne: MOSI, MISO, SCK, SSEL, Praca w trybie master lub slave, Tryb Master generuje sygnał SCK, Obsługa: Flash, A/C D/C, karty MMC itp 6
7 Peryferia SSP Synchronous Serial Port - na przykładzie LPC2368 Parametry transmisji SSP: Kompatybilność z trybami: Motorola SPI, 4-wire TI SSI, National Semiconductor Microwire Praca w trybie master lub slave, 8 ramek w trybie FIFO oba w trybie transmisji i odbioru danych Wspomaganie pracy w trybie DMA 7
8 I 2 C
9 Peryferia I 2 C - na przykładzie LPC2368 Parametry transmisji I 2 C: Komunikacja synchroniczna z wykorzystaniem arbitrażu, Magistrala szeregowa, Linie dwukierunkowe z otwartym drenem w trybie Master/Slave, Każde urządzenie na magistrali I 2 C ma swój 7-bitowy adres, Synchronizacja zegara na magistrali, 100 khz standard, 400 khz szybki 9


 itp")

10 Peryferia I 2 C - na przykładzie LPC2368 I 2 C Wykorzystanie I 2 C Czujniki Pamięci (np.: 24C128) itp SPI 10 Uwaga: SDA0 i SCL0 są typu: otwarty dren
11 11 Rejestr Adresu: może być zapisany 7 bitami, po transmisji w trybie Slave Komparator: porównuje własne 7 bitów adresu z tymi co przyszły po magistrali, porównuje również 8 bitów z głównym adresem rozgłoszeniowym [0x00] Shift Register: przechowuje dane do transmisji wysyła je od MSB (7) do LSB (0) Układ do synchronizacji i arbitrażu: sprawdza stan 1 na lini SDA, w momencie gdy inne urządzenie ustawi ją w stan 0 wówczas arbitraż zostanie przerwany a Master Slave.
12 Peryferia I 2 C - procedura arbitrażu 1. Urządzenie wysyła dane na linii SDA, 2. Jedno z urządzeń przygotowuje się do wysyłania danych w trybie master, jednak drugie urządzenie (zaznaczone linią przerywaną) ustawia linię SDA w stan 0, arbitraż zostaje przerwany, a urządzenie pierwsze przechodzi w stan Slave, 3. Urządzenie pierwsze przechodzi w tryb odbioru ale nadal generuje zegar aż transmisja zostanie zakończona. Urządzenie nie wygeneruje już następnego przebiegu zegarowego, zrobi to urządzenie które wygrało wcześniej arbitraż. 12
13 13 Serial Clock Generator: kontroluje generowanie sygnału zegarowego gdy urządzenie jest w trybie Master, a jest wyłączona gdy jest w trybie Slave. Timing & Control Logic: generują i wykrywają sygnały startu i stopu, momenty transmisji danych, wysyła i odbiera bit ACK, Kontroluje tryb Master i Slave oraz przerwania, monitoruje pracę magistrali I 2 C Status decoder & register: zbiera najważniejsze bity statusowe i sprowadza do 5 bitowego kodu. Możliwe jest 26 stanów magistrali
14 Peryferia I 2 C Rejestry Do konfiguracji i kontroli magistrali I 2 C wykorzystywanych jest 7 głównych rejestrów: I2CONSET - I2C Control Set Register I2STAT - I2C Status Register I2DAT - I2C Data Register I2ADR - I2C Slave Address Register I2SCLH - SCH Duty Cycle Register High Half Word I2SCLL - SCL Duty Cycle Register Low Half Word. I2CONCLR - I2C Control Clear Register 14
15 Peryferia I 2 C Rejestry Zawartość rejestru I2CnCONSET - I 2 C Control Set Register 31: I2 SA SO SI AA - AA włączenie obsługi wysyłania bitu potwierdzenia ACK, SI Flaga do obsługi przerwania z magistrali I 2 C zapala się gdy stan magistrali I 2 C zmienia się, w celu wykonania kolejnej akcji należy ją wyzerować, STO włączenie obsługi nadawania bitu stopu na magistrali I 2 C, STA przejście w tryb Master i nadanie bitu START, lub wysłanie bitu ponownego startu, Kasownie bitu odbywa się przez wpisanie 1 do rejestru CONCLR I2EN włączenie interfejsu I 2 C, wyłączenie przez zerowanie bitu powoduje przerwanie śledzenia zamian na liniach SDA i SCL 15
16 Peryferia I 2 C Rejestry I2CnCONSET - I 2 C Control Set Register 31: I2 SA SO SI AA - I2CnCONCLR - I 2 C Control Clear Register 31: I2 SA - SI AA - 16 AAC wyłączenie obsługi wysyłania bitu potwierdzenia ACK, SIC Flaga do obsługi przerwania z magistrali I 2 C zapala się gdy stan magistrali I 2 C zmienia się, w celu wykonania kolejnej akcji należy ją wyzerować, STAC przejście w tryb Master i nadanie bitu START, lub wysłanie bitu ponownego startu, I2ENC wyłaczenie interfejsu I 2 C, wyłączenie przez zerowanie bitu powoduje przerwanie śledzenia zamian na liniach SDA i SCL Uwaga: wpisanie jedynki do CONCLR powoduje wyzerowanie bitów w CONSET

17 Peryferia I 2 C Rejestry Zawartość rejestru I2CnSTAT - I 2 C Status Register 31: Status - Status 26 możliwych kombinacji bitów statusowych dla działania w 4-ch trybach: Tryb Master Transmitter Tryb Master Receiver Tryb Slave Receiver Tryb Slave Receiver 17 Tabele 454:457 W UM pdf
18 Peryferia I 2 C Rejestry 18 Zawartość rejestru I2CnSTAT - I 2 C Status Register KOD Zdarzenie 0x08 Bit Start został nadany 0x10 Powtórzony bit startu został nadany 0x18 Adres urządzenia I 2 C (kierunek zapisu) został nadany z potwierdzeniem (ACK) 0x20 Adres urządzenia I 2 C (kierunek zapisu) został wysłany, brak potwierdzenia (ACK) 0x28 Dane zostały wysłane z potwierdzeniem (ACK) 0x30 Dane zostały wysłane, brak potwierdzenia (ACK) 0x38 Utrata magistrali (inne urządzenie master przejęło magistralę) 0x40 Adres urządzenia I 2 C (kierunek odczytu) został nadany z potwierdzeniem (ACK) 0x48 Adres urządzenia I 2 C (kierunek odczytu) został wysłany, brak potwierdzenia (ACK) 0x50 Dane zostały odebrane i wysłano potwierdzenie (ACK) 0x58 Dane zostały odebrane i nie zostało wysłane potwierdzenia (ACK) 0xF8 Stan jałowy na magistrali nic się nie dzieje
19 Peryferia I 2 C Rejestry I2CnDAT - I 2 C Data Register 31: Data DATA zawiera dane do wysłania lub do odbioru I2CnADR - I 2 C Slave Address Register 31: Adres GC GC General Call: odpowiedź na adres rozgłoszeniowy (0x00) Adres zawiera adres dla interfejsu I 2 C urządzenia pracującego w trybie Slave 19
20 Peryferia I 2 C Rejestry I2CnSCLH - I 2 C SCL High Duty Cycle Register 31:16 31: SCLH I2CnSCLL - I 2 C SCL Low Duty Cycle Register 31:16 31: SCLL I 2 C bitfreq = f PCLK I2CSCLH + I2CSCLL 20

21 Peryferia I 2 C Rejestry I 2 C bitfreq = f PCLK I2CSCLH + I2CSCLL f I2C = khz 21
22 I 2 S
23 Peryferia I 2 S - na przykładzie LPC2368 Parametry transmisji I 2 S: Magistrala specjalizowana dla interfejsów Audio, Wybór kanałów, Praca na 8, 16 i 32 bitach, Czas akwizycji można dowolnie zmieniać od khz 16, (22.05, 32, 44.1, 48, 96 khz) 8 kolejkowe FIFO 23
24 Peryferia I 2 S - na przykładzie LPC2368

25 Peryferia I 2 S - rejestry
26 Peryferia I 2 S - FIFO
27 Timer
28 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Specyfika Liczników: 32 bit liczniki z 32 bit-i preskalerami Operacja jako Licznik impulsów lub czasu (counter/timer) Do 32 wejść dla każdego licznika, Cztery 32 bit rejestry porównywania Tryb ciągły Tryb stopowania Tryb resetowania Cztery wyjścia Generacja przerwań 28
29 Diagram blokowy P1[28]/ O MAT0[0] Match output for Timer 0, channel 0. P1[29]/ O MAT0[1] Match output for Timer 0, channel 0. P3[25]/ O MAT0[0] Match output for Timer 0, channel 0. P3[26]/ O MAT0[1] Match output for Timer 0, channel 1. P1[22]/ O MAT1[0] Match output for Timer 1, channel 0. P1[25]/ O MAT1[1] Match output for Timer 1, channel 1. P0[6]/ O MAT2[0] Match output for Timer 2, channel 0. P0[7]/ O MAT2[1] Match output for Timer 2, channel 1. P0[8]/ O MAT2[2] Match output for Timer 2, channel 2. P0[9]/ O MAT2[3] Match output for Timer 2, channel 3. P4[28]/ O MAT2[0] Match output for Timer 2, channel 0. P4[29]/ O MAT2[1] Match output for Timer 2, channel 1. P0[10]/ O MAT3[0] Match output for Timer 3, channel 0. P0[11]/ O MAT3[1] Match output for Timer 3, channel 1. P1[26]/ I CAP0[0] Capture input for Timer 0, channel 0. P1[27]/ I CAP0[1] Capture input for Timer 0, channel 1. P1[18]/ I CAP1[0] Capture input for Timer 1, channel 0. P1[19]/ I CAP1[1] Capture input for Timer 1, channel P0[4]/ I CAP2[0] Capture input for Timer 2, channel 0. P0[5]/ I CAP2[1] Capture input for Timer 2, channel 1. P0[23]/ I CAP3[0] Capture input for Timer 3, channel 0. P0[24]/ I CAP3[1] Capture input for Timer 3, channel 1.
30 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC TxIR Rejestr przerwania do zerowania, możliwy odczyt przerwania TxTCR Rejestr kontroli czasu liczników TxTC Licznik czasu który zmienia się za każdym PR+1 cyklu PCLK TxPR Rejestr preskalera licznika TxPC Licznik preskalera, zlicz do wartosci z PR TxMCR Rejestr porówania wartości - kontrolowanie przerwań i ich generowanie TxMR0 Rejestr porównania TxMR1,TxMR2,TxMR3, TxCCR Rejestr kontrolny zdarzeń reakcja na impuls, zbocze, generowanie przerwań
31 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 TxCR0 Wewnętrzny rejestr kopiujący wartość z licznika TC po wykryciu zdarzenia TxCR1 Wewnętrzny rejestr kopiujący wartość z licznika TC po wykryciu zdarzenia TxEMR Zewnętrzny układ porównania reagujący na sygnał z pinu MATn.0-3 TxCTCR Rejestr kontrolny licznika zmiana miedzy zliczaniem impulsów a odliczaniem czasu oraz reakcje na sygnał lub zbocze 31

32 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxIR - Interrupt Register 31: C1 C0 M3 M2 M1 M0 MR0 Flaga przerwania od porównania dla kanału 0 MR1 Flaga przerwania od porównania dla kanału 1 MR2 Flaga przerwania od porównania dla kanału 2 MR3 Flaga przerwania od porównania dla kanału 3 CR0 Flaga przerwania od zdarzenia dla kanał 1 CR1 Flaga przerwania od zdarzenia dla kanał 2 32 Przerwanie od danego zdarzenia sygnalizowane jest pojawieniem się stanu wysokiego na zadanym polu, Wpisanie stanu 1 na konkretny bit spowoduje wyzerowanie flagi od tego przerwania. Wpisanie stanu logicznego 0 nie ma żadnego wpływu.
33 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxCR - Timer Control Register 31:8 31: CR CE Rejestr odpowiedzialny jest za kontrolę pracy licznika impulsów lub czasu Counter Enable Aktywacja 1 lub dezaktywacja 0 zliczania impulsów przez Timer Counter i Prescaler Counter Counter Reset Resetowanie 1 w tym samym czasie liczników Timer Counter i Prescaler Counter po wystąpieniu następnego zbocza narastającego na sygnale zegarowym PCLK. Rejestry są wyzerowane do momentu nie zwrócenia w TCR [1] stanu niskiego 0 33
34 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxCTCR - Count Control Register 31:16 31: CIS T/CM 34 CTCR wykorzystywany jest do przełączania trybu pracy, między licznikiem czasu a licznikiem impulsów (Timer and Counter mode) oraz wyborem momentu zliczania ich za pomocą wejść CAP wówczas wartość w rejestrze TC zostanie zwiększony o jeden Counter/Timer Mode Wybór trybu pracy między Licznikiem Impulsów a licznikiem Czasu wraz z wyborem reakcji na zbocze przy zliczaniu: 00 Timer Mode: na każde rosnące zbocze PCLK 01 Counter Mode: inkremenaracja na zbocze narastające z wejścia CAP 10 Counter Mode: inkremenaracja na zbocze opadające z wejścia CAP 11 Counter Mode: inkremenaracja na oba zbocza z wejścia CAP Count Input Select Wybór wejścia CAPm 00 CAPn 0 01 CAPn 1 Capture Control Register (TnCCR) musi zostać zaprogramowany jako 000
35 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Timer Counter Registers TnTC 32-bitowy rejestr licznika czasu od wartości 0x do 0xFFFF FFFF i po przekroczeniu tej wartości wraca do 0x Przekroczenie wartości licznika nie wywołuje przerwania. Jednak rejestr porównania może zostać wykorzystany do tego! Prescale Register TnPR 32-bitowy rejestr określający maksymalną wartość zliczania licznika preskalera (Prescale Counter) 35
36 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Prescale Counter register 32-bitowy rejestr preskalera licznika, który kontroluje podział sygnału PCLK o stałą wartość zanim nastąpi zliczenie impulsów w rejestrze licznika czasu (Timer Counter). Pomaga to w kontroli rozdzielczości czasowej w stosunku do maksymalnego czasu zanim wartość licznika zostanie przekroczona. Licznik preskalera (Prescale Counter register) kontrolowany jest przez rejestr preskalera (Prescale register) i w momencie gdy osiągnie on wartość z tego rejestru (Prescale register) wówczas licznik czasu (Timer Counter) zostaje zwiększony o +1 a licznik preskalera zostaje wyzerowany. TC+1: co 1 PCLK gdy PR = 0, co 2 PCLKs gdy PR = 1, etc. Match Registers MR0 MR3 Wartość z tego rejestru jest ciągle porównywana z licznikiem czasu (Timer Counter). Gdy obie wartości są równe, następuje wywołanie automatycznej akcji: resetu wartości TC, zastopowanie licznika czasu. Można je kontrolować w rejestrze MCR 36
37 MR3S MR3R MR3I MR2S MR2R MR2I MR1S MR1R MR1I MR0S MR0R MR0I Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxMCR - Match Control Register 31:16 31: MRnI włączanie generowania przerwania 1 w momencie gdy MRn osiąga wartość taką jak w TC MRnR wyzerowanie od MRn, Wartość w TC zostanie wyzerowana w momencie gdy osiągnie taką samą wartość co MRn, MRnS zatrzymanie od MRn, Zliczanie w TC zostanie zatrzymane w momencie osiągnięcia wartości takiej jak w MRn, dodatkowo w TCR[0] zostanie ustawione na stan 0 w momencie gdy MRn = TC n = 0, 1, 2, 3 37
38 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxCCR - Capture Control Register 31:16 31:16 15: CAP1I CAP1FE CAP1RE CAP0I CAP0FE CAP0RE 38 CAP0RE reakcja na zbocze narastające dla odpowiadającego wejścia CAPn.0, spowoduje zapamiętanie zawartości licznika TC w odpowiadającym mu rejestrze CR0 CAP0FE - reakcja na zbocze opadające dla odpowiadającego wejścia CAPn.0, spowoduje zapamiętanie zawartości licznika TC w odpowiadającym mu rejestrze CR0 CAP0I ustawienie tego bitu powoduje nie tylko zapamiętanie stanu licznika TC w odpowiadającym mu rejestrze CR0 ale również zgłoszenie przerwania CAP1RE reakcja na zbocze narastające dla odpowiadającego wejścia CAPn.1, spowoduje zapamiętanie zawartości licznika TC w odpowiadającym mu rejestrze CR1 CAP1FE - reakcja na zbocze opadające dla odpowiadającego wejścia CAPn.1, spowoduje zapamiętanie zawartości licznika TC w odpowiadającym mu rejestrze CR1 CAP1I ustawienie tego bitu powoduje nie tylko zapamiętanie stanu licznika TC w odpowiadającym mu rejestrze CR0 ale również zgłoszenie przerwania
39 EM3 EM2 EM1 EM0 Peryferia Timer 0, 1, 2, 3 - na przykładzie LPC2368 Zawartość rejestru TxEMR - External Match Register 31:16 31: EMC3 EMC2 EMC1 EMC0 EM0 flaga załączania wyjścia MATn.0. W momencie wystąpienia takich samych wartości na TC i MR0 wówczas odpowiedni stan na pinie MATn.0 jest ustawiony. Jego reakcja ustawiana jest na linii EMC0 EMC0 stan tej przestrzeni w rejestrze określa zachowanie wyjścia pinu MATn.0 00 nic nie rób 01 zeruje odpowiednią linię MAT 10 ustawia odpowiednia linię MAT 11 zmienia stan na przeciwny na odpowiedniej lini MAT 39
40 PWM
41 Peryferia PWM - na przykładzie LPC2368 Specyfika układu PWM: Operacja zliczania impulsów lub czasu 6 pojedynczych wyjść lub 3 podwójne Niezależny 32 bitowy licznik od licznika Timer/Counter Możliwość zmiany rejestru porównania (MR) w tym samym czasie! 7 rejetrów porównania Operacja jako standardowy licznik 41
42
43 PWM Timer/Counter
44 Peryferia PWM - na przykładzie LPC2368
45 Peryferia PWM - na przykładzie LPC2368
46 Peryferia PWM - na przykładzie LPC2368

47 Peryferia PWM - na przykładzie LPC2368 Resetowanie i ustawianie wyjść dla układu PWM
48 Peryferia PWM - na przykładzie LPC2368 PWM1IR Rejestr przerwania do zerowania, możliwy odczyt przerwania PWM1TCR Rejestr kontroli czasu liczników PWM1TC Licznik czasu który zmienia się za każdym PR+1 cyklu PCLK PWM1PR Rejestr preskalera licznika PWM1PC Licznik preskalera, zlicz do wartości z PR PWM1MCR Rejestr porównania wartości - kontrolowanie przerwań i ich generowanie PWM1MR0 Rejestr porównania PWM1MR1 PWM1MR6, PWM1CCR Rejestr kontrolny zdarzeń reakcja na impuls, zbocze, generowanie przerwań
49 Peryferia PWM - na przykładzie LPC2368 PWM1CR0-3 Wewnętrzny rejestr kopiujący wartość z licznika TC po wykryciu zdarzenia PWM1PCR Umożliwia wybór wyjść oraz konkretnych kanałów oraz ustawienie pojedynczego lub podwójnego wyjścia PWM1LER włączanie wyboru NOWEJ wartości porównania PWM1CTCR Rejestr kontrolny licznika zmiana miedzy zliczaniem impulsów a odliczaniem czasu oraz reakcje na sygnał lub zbocze
50 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1IR - PWM Interrupt Register 31:16 31: [0] PWMMR0 flaga przerwania od PWM dla kanału 0, występuje gdy licznik i rejestr porównania są równe. [3] PWMMR3 flaga przerwania od PWM dla kanału 3, występuje gdy licznik i rejestr porównania są równe. [4] PWMCAP0 flaga przerwania od wejścia 0 [5] PWMCAP1 flaga przerwania od wejścia 1 [8] PWMMR4 flaga przerwania od PWM dla kanału 4, występuje gdy licznik i rejestr porównania są równe. [10] PWMMR6 flaga przerwania od PWM dla kanału 6, występuje gdy licznik i rejestr porównania są równe.
51 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1TCR - PWM Timer Control Register 31:16 31: PE - CR CE Counter Enable Licznik PWM i preskaler licznika PWM są włączone i gotowe do zliczania Counter Reset Licznik PWM i preskaler licznika PWM są zsynchronizowane do resetu wartości na następnym wysokim stanie zegarowym PCLK. Liczniki są wyzerowane póki bit (Counter Reset ) nie zostanie wyzerowany PWM Enable Jeśli bit ten jest w stanie 1 wówczas tryb PWM jest włączony, w wypadu wpisania 0 wówczas układ pełni rolę układu czasowolicznikowego.
52 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1CTCR - PWM Count Control Register 31:8 31: CIS C/TM Counter/Timer Mode: 00 Praca w trybie pomiaru czasu: TC jest inkrementowane wówczas gdy Prescale Counter zrówna się do Prescale Register 01 Praca w trybie licznika: TC jest inkrementowany na zbocze narastające z wejścia PCAP 10 Praca w trybie licznika: TC jest inkrementowany na zbocze opadające z wejścia PCAP 11 Praca w trybie licznika: TC jest inkrementowany na oba zbocza narastające i opadające z wejścia PCAP Count Input Select wybór wejścia: 00 PCAP CAP1.1
53 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1PCR - PWM Control Registers 31:15 31: A6 A5 A4 A3 A2 A1 - L6 L5 L4 L3 L2 - PWMSEL2 ustawienie bitu skutkuje przełączenie się w tryb podwójny na wyjściu PWM2, zerowanie bitu powoduje przejście w tryb pojedynczy PWMSEL6 ustawienie bitu skutkuje przełączenie się w tryb podwójny na wyjściu PWM6, zerowanie bitu powoduje przejście w tryb pojedynczy PWMENA1 ustawienie powoduje włączenie wyjścia PWM1, zerowanie jego wyłączenie PWMENA6 ustawienie powoduje włączenie wyjścia PWM6, zerowanie jego wyłączenie
54 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1MCR - PWM Match Control Register 31:16 31: S 6R 6I 3S 3R 3I 2S 2R 2I 1S 1R 1I 0S 0R 0I [0I]: PWMMRnI flaga przerwania od PWMMRn, przerwanie generowane jest e momencie gdy PWMMRn ma taką samą wartość jak PWMTC [0R]: PWMMRnR Zerowanie od PWMMRn, PWMTC jest zerowany w momencie gdy PWMMR0 ma taką samą wartość jak PWMTC [0S]: PWMMRnS Stopowanie PWMMRn, PWMTC oraz PWMPC zostaną zatrzymane a PWMTCR[0] zostanie ustawione na 0 jeśli PWMMRn ma taką samą wartość jak PWMTC n = 0, 1, 2, 3, 4, 5, 6
55 Peryferia PWM - na przykładzie LPC2368 Zawartość rejestru PWM1LER - PWM Latch Enable Register 31:16 31: L 5L 4L 3L 2L 1L 0L Rejestr PWM1LER służy do aktualizacji rejestrów PWMMATn gdy układ pracuje w trybie PWM. 0L Ustawienie tego bitu w stan wysoki spowoduje wpisanie do rejestru Match 0 wartości
56 ARM a gdzie to jest?

57 57 ARM ilość ma znaczenie

58 LPC rodzina układów Cortex-M0+ ARM9 58 ARM7 Cortex-M4 MCUs with Cortex-M0 Co-Processors



59 Cortex-M3 embedded LPC
, przeznaczone dla aplikacji mikrokontrolerowych.")
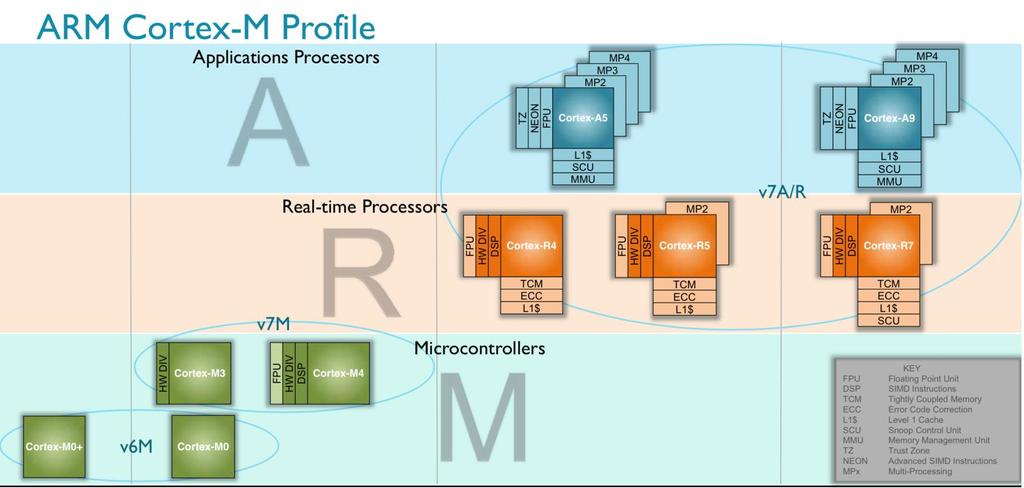
60 Cortex Rodzina Cortex składa się z trzech wersji rdzeni: Cortex R - przeznaczonych do stosowania w systemach czasu rzeczywistego (real-time systems), Cortex A - przeznaczonych do stosowania w dużych systemach z zaimplementowanymi systemami operacyjnymi, mają wbudowaną m.in. jednostkę MMU, Cortex M - rdzenie zoptymalizowane cenowo (cost-sensitive), przeznaczone dla aplikacji mikrokontrolerowych. 60
61 61 Cortex





62 Zestaw instrukcji ogólnych, obsługa I/O Zaawansowane operacje, manipulacja bitowa Operacja DSP, SIMD, MAC Operacje zmiennoprzecinkowe
63 Cortex podstawowe pojęcia Jednostka Znaczenie FPU Floating Point Unit jednostka zmiennoprzecinkowa DSP Digital Signal Processing (SIMD Instructions) wsparcie dla operacji DSP, przetwarzanie zygnałó TCM Tightly Coupled Memory pamięć ściśle przyległa ECC Error Code Correction pamięć RAM wyposażona w system kodowania korekcyjnego L1$ Level 1 Cache pamięć podręczna pierwszego poziomu SCU Snoop Control Unit jednostka sterująca pamięci, łączenie wielu procesorów, pamięci MMU Memory Management Unit jednostka zarządzania pamięcią TZ Trust Zone system bezpieczeństwa, ochrona urządzeń NEON Advanced SIMD Instruction efektywne przetwarzanie SIMD - (Single Instruction, Multiple Data) do 16 instrukcji MPx Multi Processing wieloprocesorowość 63 HV DIV Hardware Divide sprzętowa jednostka dzieląca MPU Memory Protection Unit jednostka ochrony pamięci


64 SCU - Snoop Control Unit Cortex A9 MPcore CPU CPU CPU CPU Cache Instr. Data Cache Cache Instr. Data Cache Cache Instr. Cache Cache Instr. Data Cache Snoop Control Unit (SCU) Accelerator Coherence Port L2 Cache 64 Main Memory


65 ARM NEON - silnik multimedialny ARM NEON jest blokiem SIMD ogólnego użycia Przeznaczony głównie do obróbki multimediów Pozwala na zwiększenie wydajności przetwarzania grafiki o około 3x w porównaniu z rodziną ARMv5 W przypadku DSP wzrost wydajności może być jeszcze większy (do 8x) Posiada 32 rejestry 64-bitowe łączone w 16 rejestrów 128- bitowych SISD Single Instruction Single Data SIMD - Single Instruction Multiple Data 65 Lista rozkazów ARM oraz Thumb-2 zawiera ponad 100 instrukcji SIMD

66 66 Skalowność rodziny Cortex M
67 Cortex M Procesor 32-bitowy: Kolejka instrukcji 3 stopniowa, Architektura harwardzka Lista instrukcji Thumb-2,bardzo zwarty kod przy dużej wydajności Wiele trybów i domen oszczędzania energii Nested Vectored Interrupt Controller,dobrze zdefiniowane czasy i sposoby wywoływania przerwań, Wsparcie dla systemów RTOS, Wsparcie dla debuggerów (JTAG, SWD Serial Wire Debug) 67
68 Bit band w Cortex-ach Natychmiastowy dostęp do pojedynczego bitu, Dostęp w obszarze RAM (0x ) oraz urządzań peryferyjnych (0x ) Zazwyczaj aby zmienić stan pojedynczego bitu: - odczyt komórki pamięci do rejestru, - ustawienie interesującego bitu, - Zapis wartości do komórki pamięci Bit band zapis lub odczyt dowolnego bitu na podstawie adresu interesującego bitu 68

69 NVIC - Nested Vectored Interrupt Controller - kontroler przerwań zagnieżdżonych Wyjątki, najważniejsze w systemie Priorytety przerwań na przykładzie Cortex M3 NMI przerwanie niemaskowalne HardFault błędy krytyczne MemManage manager pamięci BusFault błąd podczas dostępu do pamięci UsageFault niezdefiniowana instrukcja SVCall wywołanie przez instrukcję SVC Debug Monitor tryb debugowania PendSV żądanie opóźnionego wywołania systemu SysTick Timer systemowy, przerwanie okrsowe 69
,")
70 Cortex M0 Główne cechy: Architektura v6-m prekursor, pierwowzór układów CORTEX Najuboższa wersja procesorów ARM Jednocześnie też najbardziej oszczędna jedynie 85µW/MHz Kompatybilność z wersją Cortex-M3 Struktura składa się z zaledwie bramek Tylko 56 instrukcji optymalizowanych pod kątem języka C Wsparcie dla nisko-mocowej komunikacji bezprzewodowej: Bluetooth Low Energy (BLE), ZigBee, itp. Wydajność 0.9 DMIPS/MHz Instrukcja mnożenie 32x32 w jednym cyklu Opóźnienie wywołania przerwań: 16 cykli 70

71 Cortex M1 Główne cechy: Tzw. miękka wersja rdzenia, Rdzeń wykonany jako IP Core z możliwością osadzenie w FPGA, Wsparcie dla układów Xilinx, Actel, Altera 71
 Do 240 źródeł przerwań!!! Wsparcie dla szeregu protokołów szeregowych Wydajność 1.")
72 Cortex M3 72 Główne cechy: Wprowadzony na rynek w 2004 roku Przewidziany do najbardziej wydajnych mikrokontrolerów Wysoka wydajność i bogactwo cech Mały pobór prądu (12.5 DMIPS/mW) Do 240 źródeł przerwań!!! Wsparcie dla szeregu protokołów szeregowych Wydajność 1.25DMIPS/MHz Wsparcie dla operacji na bitach Mnożenie 32x32 w jednym cyklu, Dzielenie w 2-12 cyklach Kolejka instrukcji (3 stopnie) plus przewidywanie skoków Kontrola pamięci (MPU) Prędkość działania: do 275 MHz /340 DMIPS

73 LPC43x0 Cortex M4, Cortex M0 Główne cechy: Wieloprocesorowość: rdzeń Cortex M4, koprocesor Cortex M0, Rdzeń Cortex- M4 zoptymalizowany pod kątem DSP Rozbudowane układy peryferyjne, Możliwość rozdzielenia sygnałów zegarowych, Możliwość kontroli mocy każdego rdzenia z osobna 73


74 LPC43x0 Cortex M4, Cortex M0 Główne cechy: Cortex M4 operacje DSP Cortex M0 kontrola I/O Połączenie do wspólnej magistrali AHB umożliwia: bezpośrednią komunikację pomiędzy jednostkami CPU, współdzielić pamięć 74

75 LPC43x0 Cortex M4, Cortex M0 Maksymalną wydajność uzyskuje się gdy każda jednostka korzysta z odrębnego fragmentu pamięci 75
76 ARM, THUMB, THUMB2 zdolność do obsługi instrukcji na danych 16- i 32-bitowych bez konieczności stosowania jakichkolwiek zabiegów, zmniejszenie objętości wynikowego kodu oraz na zwiększenie wypadkowej prędkości, Thumb/Thumb2 - większa, w porównaniu do rozkazów ARM, gęstość upakowania poleceń, Lista Thumb-2 ma pewne rozszerzenia w stosunku do listy ARM (np. sprzętowe dzielenie), Wszystkie rozkazy wykonują się w ściśle określonym czasie zwykle 1 cykl. 4 bitowy kod warunkowy na początku każdej instrukcji. 76
77 77 Dziękuję za uwagę
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Procesory osadzone ETD 7211 W
 Procesory osadzone ETD 7211 W6 26.11.2018 Peryferia przetwornik ADC - na przykładzie LPC2368 Parametry przetwornika ADC: 6 kanałów multipleksowany, konwersja od 3 do 10 bitów, zakres pomiarowy 0 3V, indywidualny
Procesory osadzone ETD 7211 W6 26.11.2018 Peryferia przetwornik ADC - na przykładzie LPC2368 Parametry przetwornika ADC: 6 kanałów multipleksowany, konwersja od 3 do 10 bitów, zakres pomiarowy 0 3V, indywidualny
Wykład 5. Architektura ARM
 Wykład 5 Architektura ARM Plan wykładu ARM co to jest? od historii od dzisiaj Wersje architektury ARMv1 ARMv7 Rodziny obecnie w użyciu ARM7 Cortex-A9 Listy instrukcji ARM, Thumb, Thumb-2, NEON, Jazelle
Wykład 5 Architektura ARM Plan wykładu ARM co to jest? od historii od dzisiaj Wersje architektury ARMv1 ARMv7 Rodziny obecnie w użyciu ARM7 Cortex-A9 Listy instrukcji ARM, Thumb, Thumb-2, NEON, Jazelle
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Wykład 6. Mikrokontrolery z rdzeniem ARM
 Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Budowa Mikrokomputera
 Budowa Mikrokomputera Wykład z Podstaw Informatyki dla I roku BO Piotr Mika Podstawowe elementy komputera Procesor Pamięć Magistrala (2/16) Płyta główna (ang. mainboard, motherboard) płyta drukowana komputera,
Budowa Mikrokomputera Wykład z Podstaw Informatyki dla I roku BO Piotr Mika Podstawowe elementy komputera Procesor Pamięć Magistrala (2/16) Płyta główna (ang. mainboard, motherboard) płyta drukowana komputera,
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Wbudowane układy peryferyjne cz. 2 Wykład 8
 Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
UTK ARCHITEKTURA PROCESORÓW 80386/ Budowa procesora Struktura wewnętrzna logiczna procesora 80386
 Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Budowa procesora 80386 Struktura wewnętrzna logiczna procesora 80386 Pierwszy prawdziwy procesor 32-bitowy. Zawiera wewnętrzne 32-bitowe rejestry (omówione zostaną w modułach następnych), pozwalające przetwarzać
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Memory Map for LPC2138
 Memory Map for LPC2138 4 GB 3,75 GB 3,5 GB AHB Peripherals VPB Peripherals 0xFFFF FFFF 0xF000 0000 0xE000 0000 Reserved Address Space 2 GB Boot Block (re-mapped from On-Chip Flash memory) 0x8000 0000 Reserved
Memory Map for LPC2138 4 GB 3,75 GB 3,5 GB AHB Peripherals VPB Peripherals 0xFFFF FFFF 0xF000 0000 0xE000 0000 Reserved Address Space 2 GB Boot Block (re-mapped from On-Chip Flash memory) 0x8000 0000 Reserved
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Systemy wbudowane - wykład 8. Dla zabicia czasu Notes. I 2 C aka IIC aka TWI. Notes. Notes. Notes. Przemek Błaśkiewicz.
 Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Systemy wbudowane - wykład 8 Przemek Błaśkiewicz 17 maja 2017 1 / 82 Dla zabicia czasu Bluetooth Terminal HC-05, urządzenie...:8f:66, kod 1234 2 / 82 I 2 C aka IIC aka TWI Inter-Integrated Circuit 3 /
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
CompactPCI. PCI Industrial Computers Manufacturers Group (PICMG)
") PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
PCI Industrial Computers Manufacturers Group (PICMG) nowy standard; nowa jakość komputerów realizujących krytyczne zadania w systemach pracujących w trudnych warunkach; Baza specyfikacji: format kaset
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Programowanie mikrokontrolerów 2.0
 4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
Wykład 3. Przegląd mikrokontrolerów 8-bit: STM8
 Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Systemy wbudowane - wykład 7
 Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
Systemy wbudowane - wykład 7 Przemek Błaśkiewicz 11 kwietnia 2019 1 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit 2 / 76 I 2 C aka IIC aka TWI Inter-Integrated Circuit używa dwóch linii przesyłowych
(przykład uogólniony)
") Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240 Strona 1 z 12 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1. Mechanizm przerwań
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240 Strona 1 z 12 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1. Mechanizm przerwań
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Architektura Systemów Komputerowych. Rozwój architektury komputerów klasy PC
 Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Wykład 7. Architektura mikroprocesorów powtórka
 Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
3. Sygnały zegarowe i ich konfiguracja, mechanizmy bezpieczeństwa... 47
 Spis treści 3 1. Rdzeń Cortex-M3...9 1.1. Firma ARM i jej wyroby...10 1.2. Rodzina rdzeni Cortex...12 1.3. Ogólne spojrzenie na architekturę rdzenia Cortex-M3...13 1.4. Rejestry podstawowe...16 1.5. Przestrzeń
Spis treści 3 1. Rdzeń Cortex-M3...9 1.1. Firma ARM i jej wyroby...10 1.2. Rodzina rdzeni Cortex...12 1.3. Ogólne spojrzenie na architekturę rdzenia Cortex-M3...13 1.4. Rejestry podstawowe...16 1.5. Przestrzeń
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Architektura systemu komputerowego. Działanie systemu komputerowego. Przerwania. Obsługa przerwań (Interrupt Handling)
") Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Struktury systemów komputerowych Architektura systemu komputerowego Działanie systemu komputerowego Struktura we/wy Struktura pamięci Hierarchia pamięci Ochrona sprzętowa Architektura 2.1 2.2 Działanie
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Timery i przerwania laboratorium: 03 autor: mgr inż. Katarzyna Smelcerz Kraków,
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Timery i przerwania laboratorium: 03 autor: mgr inż. Katarzyna Smelcerz Kraków,
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Mikroinformatyka. Koprocesory arytmetyczne 8087, 80187, 80287, i387
 Mikroinformatyka Koprocesory arytmetyczne 8087, 80187, 80287, i387 Koprocesor arytmetyczny 100 razy szybsze obliczenia numeryczne na liczbach zmiennoprzecinkowych. Obliczenia prowadzone równolegle z procesorem
Mikroinformatyka Koprocesory arytmetyczne 8087, 80187, 80287, i387 Koprocesor arytmetyczny 100 razy szybsze obliczenia numeryczne na liczbach zmiennoprzecinkowych. Obliczenia prowadzone równolegle z procesorem
Architektura Systemów Komputerowych. Bezpośredni dostęp do pamięci Realizacja zależności czasowych
 Architektura Systemów Komputerowych Bezpośredni dostęp do pamięci Realizacja zależności czasowych 1 Bezpośredni dostęp do pamięci Bezpośredni dostęp do pamięci (ang: direct memory access - DMA) to transfer
Architektura Systemów Komputerowych Bezpośredni dostęp do pamięci Realizacja zależności czasowych 1 Bezpośredni dostęp do pamięci Bezpośredni dostęp do pamięci (ang: direct memory access - DMA) to transfer
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Architektura komputerów. Układy wejścia-wyjścia komputera
 Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura komputerów Układy wejścia-wyjścia komputera Wspópraca komputera z urządzeniami zewnętrznymi Integracja urządzeń w systemach: sprzętowa - interfejs programowa - protokół sterujący Interfejs
Architektura ARM. Materiały do wykładu. Marcin Peczarski. 19 maja 2015. Instytut Informatyki Uniwersytet Warszawski
 7 1 2 Materiały do wykładu Architektura ARM Marcin Peczarski Instytut Informatyki Uniwersytet Warszawski 19 maja 2015 7 1 2 1 ARM = Advanced RISC Machines Międzynarodowa firma, mająca główną siedzibę w
7 1 2 Materiały do wykładu Architektura ARM Marcin Peczarski Instytut Informatyki Uniwersytet Warszawski 19 maja 2015 7 1 2 1 ARM = Advanced RISC Machines Międzynarodowa firma, mająca główną siedzibę w
Programowany układ czasowy APSC
 Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy bufor dwukierunkowy HC244 dwa 4-bitowe bufory jednokierunkowe
 Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Bufory (BUFFER) Bufory stosuje się po to by: - zwiększyć obciążalność magistrali - chronić układ wysokiej skali integracji - sterować przepływem danych HC541 8-bitowy bufor jednokierunkowy HC245 8-bitowy
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Programowany układ czasowy
 Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Instrukcja obsługi elektronicznego licznika typu 524. Model 524. Licznik sumujący i wskaźnik pozycji typu Opis. 1. Opis
 Instrukcja obsługi elektronicznego licznika typu 524 Model 524 Model 524 jest urządzeniem wielozadaniowym i zależnie od zaprogramowanej funkcji podstawowej urządzenie pracuje jako: licznik sumujący i wskaźnik
Instrukcja obsługi elektronicznego licznika typu 524 Model 524 Model 524 jest urządzeniem wielozadaniowym i zależnie od zaprogramowanej funkcji podstawowej urządzenie pracuje jako: licznik sumujący i wskaźnik
Prezentacja systemu RTLinux
 Prezentacja systemu RTLinux Podstawowe założenia RTLinux jest system o twardych ograniczeniach czasowych (hard real-time). Inspiracją dla twórców RTLinux a była architektura systemu MERT. W zamierzeniach
Prezentacja systemu RTLinux Podstawowe założenia RTLinux jest system o twardych ograniczeniach czasowych (hard real-time). Inspiracją dla twórców RTLinux a była architektura systemu MERT. W zamierzeniach
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Architektura mikroprocesorów z rdzeniem ColdFire
 Architektura mikroprocesorów z rdzeniem ColdFire 1 Rodzina procesorów z rdzeniem ColdFire Rdzeń ColdFire V1: uproszczona wersja rdzenia ColdFire V2. Tryby adresowania, rozkazy procesora oraz operacje MAC/EMAC/DIV
Architektura mikroprocesorów z rdzeniem ColdFire 1 Rodzina procesorów z rdzeniem ColdFire Rdzeń ColdFire V1: uproszczona wersja rdzenia ColdFire V2. Tryby adresowania, rozkazy procesora oraz operacje MAC/EMAC/DIV
Moduł wspierający diagnostykę i sprzętowe debugowanie
 Moduł wspierający diagnostykę i sprzętowe debugowanie 1 Diagnostyka mikroprocesorowego systemu czasu rzeczywistego Programowe emulatory procesorów, Sprzętowe emulatory procesorów, Debugery programowe,
Moduł wspierający diagnostykę i sprzętowe debugowanie 1 Diagnostyka mikroprocesorowego systemu czasu rzeczywistego Programowe emulatory procesorów, Sprzętowe emulatory procesorów, Debugery programowe,
Timery w mikrokontrolerach STM32F3
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM Podstawy Programowania Mikroprocesorów i Procesorów DSP Timery w mikrokontrolerach
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM Podstawy Programowania Mikroprocesorów i Procesorów DSP Timery w mikrokontrolerach
Rejestry procesora. Nazwa ilość bitów. AX 16 (accumulator) rejestr akumulatora. BX 16 (base) rejestr bazowy. CX 16 (count) rejestr licznika
 rejestr akumulatora. BX 16 (base) rejestr bazowy. CX 16 (count) rejestr licznika") Rejestry procesora Procesor podczas wykonywania instrukcji posługuje się w dużej części pamięcią RAM. Pobiera z niej kolejne instrukcje do wykonania i dane, jeżeli instrukcja operuje na jakiś zmiennych.
Rejestry procesora Procesor podczas wykonywania instrukcji posługuje się w dużej części pamięcią RAM. Pobiera z niej kolejne instrukcje do wykonania i dane, jeżeli instrukcja operuje na jakiś zmiennych.
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
LABORATORIUM. TIMERY w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA TIMERY w mikrokontrolerach Atmega16-32 Opracował:
Układ wykonawczy, instrukcje i adresowanie. Dariusz Chaberski
 Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
Układ wykonawczy, instrukcje i adresowanie Dariusz Chaberski System mikroprocesorowy mikroprocesor C A D A D pamięć programu C BIOS dekoder adresów A C 1 C 2 C 3 A D pamięć danych C pamięć operacyjna karta
2. Budowa układów procesorowych rodziny TMS320C
 3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1
 Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
ARCHITEKTURA PROCESORA,
 ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Przetworniki analogowo-cyfrowe (A/C)
") Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Systemy wbudowane Mikrokontrolery
 Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Wstęp. Opis ATMEGA128 MINI MODUŁ VE-APS-1406
 ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
(Rysunek z książki T.Starecki. Mikokontrolery jednoukładowe rodziny 51. NOZOMI W-wa 1996)
") Przerwanie o wyższym priorytecie przerywa obsługę przerwania o niższym priorytecie, po czym następuje powrót do przerwanej obsługi przerwania o niższym priorytecie. (Rysunek z książki T.Starecki. Mikokontrolery
Przerwanie o wyższym priorytecie przerywa obsługę przerwania o niższym priorytecie, po czym następuje powrót do przerwanej obsługi przerwania o niższym priorytecie. (Rysunek z książki T.Starecki. Mikokontrolery
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.