Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
|
|
|
- Katarzyna Magdalena Paluch
- 8 lat temu
- Przeglądów:
Transkrypt
1 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC
2 Mikrokontrolery AVR
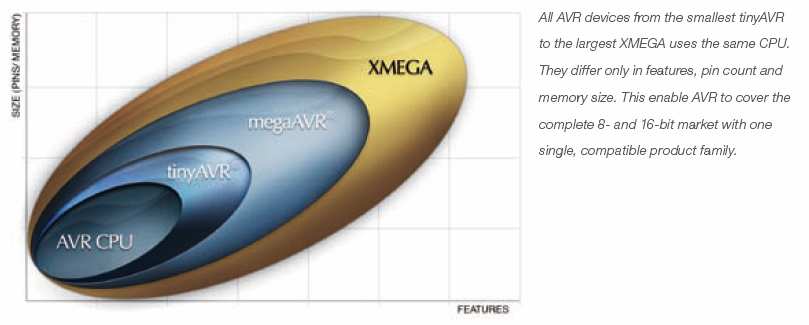
3 Mikrokontrolery AVR
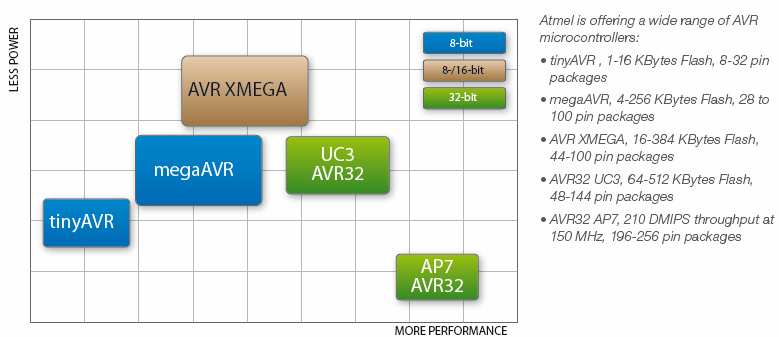
4 ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej architekturze Większość instrukcji wykonywanych w jednym cyklu zegara Pomimo uproszczonej architektury spora wydajność zegary do 20MHz Mała ilość pamięci programu (do 16kB) Mała ilość pamięci SRAM (do 512B) Małe obudowy (nawet do SOT23-6) Bardzo małe zużycie energii (PicoPower) Zasilanie od 1.8V
5 ATTiny 10
6 ATTiny 10 Główne cechy 1kB Flash 0B EEPROM 32B SRAM Max. częstotliwość zegara 12MHz Zasilanie V 4 kanały 8-bit przetwornika ADC Komparator analogowy 1 Timer (16 bit) 11 źródeł przerwań 2 kanały PWM Watchdog On-chip oscillator
7 ATTiny 10
8 ATTiny
9 ATMega Główne cechy Duża rodzina procesorów 8-bitowych o wielu zastosowaniach Większość instrukcji wykonywanych w jednym cyklu zegara Spora wydajność zegary do 20MHz Pamięć programu od 4 do 128 kb Pamięć EEPROM od 256 do 4096 B Pamięć SRAM od 0.5 do 16 kb Spora ilość ciekawych peryferii Zużycie energii w zakresie ma (kilkadziesiąt razy większe od ATTiny) Zasilanie od 1.8V
10
11 Główne cechy ATMega kb Flash 2048 B EEPROM 4096 B SRAM Max. częstotliwość zegara 16 MHz Zasilanie V 8 kanałów 10-bit przetwornika ADC Komparator analogowy 4 Timery (2 x 16 bit, 2 x 8 bit) 34 źródła przerwań 8 kanałów PWM RTC SPI UART
12 ATMega 64
13 ATMega 64
14 AVR XMEGA Główne cechy Nowa rodzina procesorów 8/16-bitowych Większość instrukcji wykonywanych w jednym cyklu zegara Duża wydajność zegary do 32MHz Pamięć programu od 16 do 384 kb Pamięć EEPROM od 1 do 4 kb Pamięć SRAM od 2 do 32 kb Spora ilość ciekawych peryferii DMA Małe zużycie energii (nieco większe od ATTiny) Zasilanie od 1.6 do 3.6V

15
16
17 Główne cechy AVR ATxmega64A1 procesor 8/16 bit 64 kb Flash 2048 B EEPROM 4096 B SRAM Max. częstotliwość zegara 32 MHz Zasilanie V 16 kanałów 12-bit przetwornika ADC 4 kanały 12-bit DAC 4 komparatory analogowe 8 timerów 16 bit 24 kanały PWM RTC 4 x SPI 8 x UART
18 AVR XMEGA A1 CPU diagram OCD On-chip Debug DES Data encryption PMIC Programmable Multilevel Interrupt Controller
19 AVR XMEGA A1 Główne cechy jednostki centralnej Architektura harvardzka, osobne pamięci i szyny dla danych oraz programu Jednopoziomowy pipelining (podczas wykonywania instrukcji następna jest pobierana z pamięci) Mnożnik sprzętowy ze sprzętowym szyfrowaniem/deszyfrowaniem danych 32 rejestry 8-bit ogólnego przeznaczenia wsparcie dla arytmetyki 8-, 16- oraz 32-bitowej bezpośrednie adresowanie do 16MB pamięci danych i programu
20 AVR XMEGA A1 - DMAC DMAC Direct Memory Access Controller Główne cechy szybki transfer danych: z pamięci do peryferiów z pamięci do pamięci z peryferiów do pamięci z peryferiów do peryferiów 4 kanały wiele możliwych trybów adresowania
21 AVR XMEGA A1 - AWeX AWeX Advanced Waveform Extension dodatkowe funkcje dla generacji przebiegów (Timer/Counter) Główne cechy 4 moduły Dead-Time Insertion moduł zwiększenia rozdzielczości PWM o 2bity (4x) buforowany generator szablonu (pattern)
22 AVR XMEGA A1 - IRCOM IRCOM IR Communication Module Główne cechy modulacja/demodulacja impulsów dla komunikacji w podczerwieni kompatybilność z IrDA 1.4 (do kb/s) może być podłączony do dowolnego modułu USART wybieralny sposób modulacji impulsów wbudowane filtrowanie
23 AVR XMEGA A1 Crypto Moduły AES/DES umożliwiają automatyczną szyfrację/deszyfrację danych Główne cechy algorytm DES: szyfrowanie i deszyfrowanie instrukcja DES wykonywana w jednym cyklu szyfracja/deszyfracja bloku 8B w 16 cykli (~0.5 us) algorytm AES: wsparcie dla kluczy 128 bitów szyfracja/deszyfracja bloku 16B w 375 cykli (~10 us)
24 ATMega 64

25 Mikrokontrolery PIC
 - Pipelining dwustopniowy - Instrukcje o długości")
26 Mikrokontrolery PIC -Procesory 8-bit RISC ze zmodyfikowaną architekturą harvardzką (instrukcje i dane na osobnych szynach) - Pipelining dwustopniowy - Instrukcje o długości jednego słowa
27 PIC10 Główne cechy Procesory RISC bardzo mało instrukcji, mała częstotliwość zegara, duuuuuże problemy podczas pisania w asemblerze Procesory 8-bitowe o bardzo uproszczonej architekturze Instrukcje wykonywane w jednym cyklu zegara za wyjątkiem skoków (2 cykle) Niewielka wydajność zegary do 4MHz Bardzo mały pobór prądu (nanowatt) Mikroskopijna ilość pamięci programu (do 750 B) Mikroskopijna ilość pamięci SRAM (do 24 B) Małe obudowy (SOT23-6, DFN8, PDIP8) Zasilanie 2 5.5V
28 PIC 10F200
29 PIC 10F200 Główne cechy 256 B Flash 0B EEPROM 16 B SRAM Max. częstotliwość zegara 4MHz Zasilanie V 1 Timer (TMR 8bit) Watchdog On-chip oscillator
30 PIC 10F200

31 PIC10F200 (33 instr.)
32 PIC12 Główne cechy Procesory RISC bardzo mało instrukcji, przyzwoita częstotliwość zegara, duuuże problemy podczas pisania w asemblerze Procesory 8-bitowe o bardzo uproszczonej architekturze Instrukcje wykonywane w jednym cyklu zegara za wyjątkiem skoków (2 cykle) Dobra wydajność zegary do 20MHz Bardzo mały pobór prądu (nanowatt) Mikroskopijna ilość pamięci programu (do 3750 B) Mikroskopijna ilość pamięci SRAM (do 128 B) Małe obudowy (DFN8, PDIP8, MSOP8) Zasilanie 2 5.5V
33 PIC 12F615
34 PIC 12F615 Główne cechy 1750 B Flash 0B EEPROM 64 B SRAM Max. częstotliwość zegara 20MHz Zasilanie V 3 Timer (1 x 16bit, 2x 8bit) 4 kanały 10-bit ADC Watchdog On-chip oscillator
35 PIC 12F615

36 PIC12F615 (35 instr.)
37 PIC16 Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Szeroka rodzina procesorów Instrukcje wykonywane w jednym cyklu instrukcji (4 cykle zegara) za wyjątkiem skoków (2 cykle) Dobra wydajność zegary do 32MHz Bardzo mały pobór prądu (nanowatt) Mała ilość pamięci programu (do 16kB) Mała ilość pamięci SRAM (do 1024 B) Obecna pamięć EEPROM (ale nie wszędzie) Zasilanie V
38 PIC 16F1934
39 PIC 16F1934 Główne cechy 7500 B Flash 256 B EEPROM 256 B SRAM Max. częstotliwość zegara 32kHz -> 32MHz Zasilanie V 5 Timerów (1 x 16bit, 4x 8bit) 14 kanały 10-bit ADC 1 x USART, 1 x SPI, 1 x I2C Watchdog On-chip oscillator Sterownik wyświetlacza LCD
40 PIC 16F1934
41 PIC 16F clock
42 PIC 16F LCD
43 Główne cechy PIC 16F LCD Autonomiczny sterownik wyświetlaczy LCD (takich jak np. w zegarkach) Szerokie możliwości sterowania kontrastem Sterowanie jednocześnie do 4 wyświetlaczy (multipleksacja) Trzy wybieralne źródła zegara dla wyświetlacza
44 PIC 16F CPS
45 Główne cechy CPS Capacitive Sensing Module Obsługa klawiatur pojemnościowych Obsługa do 16 klawiszy Zbliżenie palca do klawisza zmienia pojemność, a więc i częstotliwość generowaną w module PIC 16F CPS
46 PIC18 Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara (nawet 64MHz) Szeroka rodzina procesorów Instrukcje wykonywane w jednym cyklu instrukcji (4 cykle zegara) za wyjątkiem skoków (2 cykle) Bardzo dobra wydajność do 16 MIPS Bardzo mały pobór prądu (nanowatt) Wystarczająca ilość pamięci programu (do 96kB) Wystarczająca ilość pamięci SRAM (do 3936 B) Obecna pamięć EEPROM (ale nie wszędzie) Zasilanie 2 5.5V (niektóre wersje V)

47

48 PIC 18F multiplier PIC18 posiadają w strukturze mnożniki sprzętowe 8x8 bit dzięki czemu można stosować procesory do wydajnych(?) obliczeń.
49 PIC 18F ECAN Niektóre PIC18 posiadają w strukturze również moduły ECAN (enhanced CAN) kompatybilne ze standardowymi modułami CAN. Najważniejsze cechy: Implementacja protokołów CAN 1.2, CAN 2.0A oraz CAN 2.0B Programowalna prędkość transmisji do 1Mb/s Dwa typy ramek: standardowa i rozszerzona Programowalne źródło zegara Niskomocowy tryb uśpienia
50 Dziękuję za uwagę
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 7. Architektura mikroprocesorów powtórka
 Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Wykład 7 Architektura mikroprocesorów powtórka Architektura mikroprocesorów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit:
Wykład 3. Przegląd mikrokontrolerów 8-bit: STM8
 Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Wykład 3 Przegląd mikrokontrolerów 8-bit: - 8051 - STM8 Mikrokontrolery 8051 Rodzina 8051 wzięła się od mikrokontrolera Intel 8051 stworzonego w 1980 roku Mikrokontrolery 8051 były przez długi czas najpopularniejszymi
Wykład 6. Mikrokontrolery z rdzeniem ARM
 Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Wykład 6 Mikrokontrolery z rdzeniem ARM Plan wykładu Cortex-A9 c.d. Mikrokontrolery firmy ST Mikrokontrolery firmy NXP Mikrokontrolery firmy AnalogDevices Mikrokontrolery firmy Freescale Mikrokontrolery
Wykład 2. Mikrokontrolery z rdzeniami ARM
 Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Wykład 2 Źródło problemu 2 Wstęp Architektura ARM (Advanced RISC Machine, pierwotnie Acorn RISC Machine) jest 32-bitową architekturą (modelem programowym) procesorów typu RISC. Różne wersje procesorów
Systemy wbudowane Mikrokontrolery
 Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca)
") Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
System mikroprocesorowy i peryferia. Dariusz Chaberski
 System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
System mikroprocesorowy i peryferia Dariusz Chaberski System mikroprocesorowy mikroprocesor pamięć kontroler przerwań układy wejścia wyjścia kontroler DMA 2 Pamięć rodzaje (podział ze względu na sposób
Mikrokontrolery w mechatronice. Wstępne uwagi
 Mikrokontrolery w mechatronice Wstępne uwagi Wstępny program wykładu: Układy sterowania;układy programowalne. System binarny i heksadecymalny. Mikroprocesor i mikrokontroler - podobieństwa i różnice. Charakterystyka
Mikrokontrolery w mechatronice Wstępne uwagi Wstępny program wykładu: Układy sterowania;układy programowalne. System binarny i heksadecymalny. Mikroprocesor i mikrokontroler - podobieństwa i różnice. Charakterystyka
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych. Autor: Tomasz Gluziński
 Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Budowa mikrokontrolera UC3C. - 3 rodzaje obudów
 Cechy układu UC3C - 32 bitowy mikrokontroler - zasilanie 5V lub 3,3V - moduł generecji impulsów PWM - FPU sprzetowy moduł wspomagania obliczeń - kontroler zdarzeń (PEVC- Peripheral Event Controller) -
Cechy układu UC3C - 32 bitowy mikrokontroler - zasilanie 5V lub 3,3V - moduł generecji impulsów PWM - FPU sprzetowy moduł wspomagania obliczeń - kontroler zdarzeń (PEVC- Peripheral Event Controller) -
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
Architektura mikroprocesorów TEO 2009/2010
 Architektura mikroprocesorów TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit: 8051, ST7 Wykład
Architektura mikroprocesorów TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Klasyfikacje mikroprocesorów Wykład 2: - Mikrokontrolery 8-bit: AVR, PIC Wykład 3: - Mikrokontrolery 8-bit: 8051, ST7 Wykład
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Wykład Mikrokontrolery i mikrosystemy Cele wykładu:
 Wykład Mikrokontrolery i mikrosystemy Cele wykładu: Poznanie podstaw budowy, zasad działania i sterowania mikrokontrolerów i ich urządzeń peryferyjnych. Niezbędna wiedza do dalszego samokształcenia się
Wykład Mikrokontrolery i mikrosystemy Cele wykładu: Poznanie podstaw budowy, zasad działania i sterowania mikrokontrolerów i ich urządzeń peryferyjnych. Niezbędna wiedza do dalszego samokształcenia się
System czasu rzeczywistego
 System czasu rzeczywistego Definicje System czasu rzeczywistego (real-time system) jest to system komputerowy, w którym obliczenia prowadzone równolegle z przebiegiem zewnętrznego procesu mają na celu
System czasu rzeczywistego Definicje System czasu rzeczywistego (real-time system) jest to system komputerowy, w którym obliczenia prowadzone równolegle z przebiegiem zewnętrznego procesu mają na celu
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
 Inkubator AVR Podstawy obsługi i programowania mikrokontrolerów rodziny. CZĘŚĆ I. Wprowadzenie i hardware Co na temat AVR każdy wiedzieć powinien? Producent: ATMEL (www.atmel.com) Instrukcje wykonywane
Inkubator AVR Podstawy obsługi i programowania mikrokontrolerów rodziny. CZĘŚĆ I. Wprowadzenie i hardware Co na temat AVR każdy wiedzieć powinien? Producent: ATMEL (www.atmel.com) Instrukcje wykonywane
Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3
 Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3 organizowany przez: Koło Naukowe Mikrosystemów ONYKS we współpracy z: Wydawnictwem BTC Polskim przedstawicielstwem STMicroelectronics Plan spotkania
Kurs programowania mikrokontrolerów ARM z rodziny Cortex-M3 organizowany przez: Koło Naukowe Mikrosystemów ONYKS we współpracy z: Wydawnictwem BTC Polskim przedstawicielstwem STMicroelectronics Plan spotkania
Wykład Mikroprocesory i kontrolery
 Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Wykład Mikroprocesory i kontrolery Cele wykładu: Poznanie podstaw budowy, zasad działania mikroprocesorów i układów z nimi współpracujących. Podstawowa wiedza potrzebna do dalszego kształcenia się w technice
Technika mikroprocesorowa. Konsola do gier
 K r a k ó w 1 1. 0 2. 2 0 1 4 Technika mikroprocesorowa Konsola do gier W yk o n a l i : P r o w a d z ą c y: P a w e ł F l u d e r R o b e r t S i t k o D r i n ż. J a c e k O s t r o w s k i Opis projektu
K r a k ó w 1 1. 0 2. 2 0 1 4 Technika mikroprocesorowa Konsola do gier W yk o n a l i : P r o w a d z ą c y: P a w e ł F l u d e r R o b e r t S i t k o D r i n ż. J a c e k O s t r o w s k i Opis projektu
Moduł prototypowy.. Leon Instruments. wersja 1.0
 wersja 1.0 Moduł extrino XL umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU AU oraz naukę programowania nowoczesnych mikrokontrolerów z serii XMEGA firmy Atmel. Moduł znajdzie
wersja 1.0 Moduł extrino XL umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU AU oraz naukę programowania nowoczesnych mikrokontrolerów z serii XMEGA firmy Atmel. Moduł znajdzie
Procesory Blackfin. Część 1
 Procesory Blackfin. Część 1 Wykład 7 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Charakterystyka rodziny
Procesory Blackfin. Część 1 Wykład 7 Projektowanie cyfrowych układów elektronicznych Mgr inż. Łukasz Kirchner lukasz.kirchner@cs.put.poznan.pl http://www.cs.put.poznan.pl/lkirchner Charakterystyka rodziny
Spis treści. Wykaz ważniejszych skrótów Wprowadzenie Rdzeń Cortex-M Rodzina mikrokontrolerów XMC
 Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
Wykaz ważniejszych skrótów... 8 1. Wprowadzenie... 9 1.1. Wstęp... 10 1.2. Opis zawartości książki... 12 1.3. Korzyści płynące dla Czytelnika... 13 1.4. Profil Czytelnika... 13 2. Rdzeń Cortex-M0...15
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
11.Mikrokomputeryjednoukładowe
 Materiały do wykładu 11.Mikrokomputeryjednoukładowe Marcin Peczarski Instytut Informatyki Uniwersytet Warszawski 14maja2008 Podstawowe cechy(1) 11.1 Innenazwy mikrokontroler mikroprocesor do zastosowań
Materiały do wykładu 11.Mikrokomputeryjednoukładowe Marcin Peczarski Instytut Informatyki Uniwersytet Warszawski 14maja2008 Podstawowe cechy(1) 11.1 Innenazwy mikrokontroler mikroprocesor do zastosowań
Mikroprocesory i mikrosterowniki
 Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
Interfejsy szeregowe TEO 2009/2010
 Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Interfejsy szeregowe TEO 2009/2010 Plan wykładów Wykład 1: - Wstęp. Interfejsy szeregowe SCI, SPI Wykład 2: - Interfejs I 2 C, OneWire, I 2 S, CAN Wykład 3: - Interfejs USB Wykład 4: - Interfejs FireWire,
Mikrokontrolery i pamięci MCU 8051 ATMEL
 MCU 8051 ATMEL Znana i sprawdzona, niemal klasyczna architektura 8051 jest dobrze reprezentowana w ofercie mikrokontrolerów Atmel serii AT89. Dzięki wykorzystaniu znanej architektury programowanie AT89
MCU 8051 ATMEL Znana i sprawdzona, niemal klasyczna architektura 8051 jest dobrze reprezentowana w ofercie mikrokontrolerów Atmel serii AT89. Dzięki wykorzystaniu znanej architektury programowanie AT89
2. Budowa układów procesorowych rodziny TMS320C
 3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
o Instalacja środowiska programistycznego (18) o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)
 o Blink (18) o Zasilanie (21) o Złącza zasilania (22) o Wejścia analogowe (22) o Złącza cyfrowe (22)") O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
O autorze (9) Podziękowania (10) Wstęp (11) Pobieranie przykładów (12) Czego będę potrzebował? (12) Korzystanie z tej książki (12) Rozdział 1. Programowanie Arduino (15) Czym jest Arduino (15) Instalacja
projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania;
 PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
NX700 PLC www.atcontrol.pl
 NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Wstęp. Opis ATMEGA128 MINI MODUŁ VE-APS-1406
 ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Arduino dla początkujących. Kolejny krok Autor: Simon Monk. Spis treści
 Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
Arduino dla początkujących. Kolejny krok Autor: Simon Monk Spis treści O autorze Podziękowania Wstęp o Pobieranie przykładów o Czego będę potrzebował? o Korzystanie z tej książki Rozdział 1. Programowanie
AVR DRAGON. INSTRUKCJA OBSŁUGI (wersja 1.0)
") AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
AVR DRAGON INSTRUKCJA OBSŁUGI (wersja 1.0) ROZDZIAŁ 1. WSTĘP... 3 ROZDZIAŁ 2. ROZPOCZĘCIE PRACY Z AVR DRAGON... 5 ROZDZIAŁ 3. PROGRAMOWANIE... 8 ROZDZIAŁ 4. DEBUGOWANIE... 10 ROZDZIAŁ 5. SCHEMATY PODŁĄCZEŃ
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
WYKŁAD 5. Zestaw DSP60EX. Zestaw DSP60EX
 Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Mikrokontrolery AVR architektura i narzędzia inżynierskie. Marcin Korus, JM Elektronik
 Mikrokontrolery AVR architektura i narzędzia inżynierskie Marcin Korus, JM Elektronik JM Elektronik nowoczesny dystrybutor Dostawca profesjonalnych elementów elektronicznych od 1990 roku Jeden z największych
Mikrokontrolery AVR architektura i narzędzia inżynierskie Marcin Korus, JM Elektronik JM Elektronik nowoczesny dystrybutor Dostawca profesjonalnych elementów elektronicznych od 1990 roku Jeden z największych
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip.
 1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
1 Mateusz Klimkowski IV rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy USB interface in 8-bit microcontrollers PIC18F family manufactured by Microchip. Interfejs USB w 8-bitowych
MIKROKONTROLERY AVR JĘZYK C WYDAWNICTWO ATNEL PODSTAWY PROGRAMOWANIA. Miros aw Kardaś. Szczecin 2013. Mojej Żonie Kasi
 WYDAWNICTWO ATNEL MIKROKONTROLERY AVR JĘZYK C PODSTAWY PROGRAMOWANIA Miros aw Kardaś Szczecin 2013 Mojej Żonie Kasi Książka przeznaczona jest dla elektroników i hobbystów, którzy chcą szybko, opierając
WYDAWNICTWO ATNEL MIKROKONTROLERY AVR JĘZYK C PODSTAWY PROGRAMOWANIA Miros aw Kardaś Szczecin 2013 Mojej Żonie Kasi Książka przeznaczona jest dla elektroników i hobbystów, którzy chcą szybko, opierając
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Konstrukcja systemu telemetrycznego z zastosowaniem technologii internetowych
 1 Konstrukcja systemu telemetrycznego z zastosowaniem technologii internetowych wykorzystanie mikrokontrolera do realizacji akwizycji danych oraz zaimplementowanie w nim serwera WWW i serwera bazy danych
1 Konstrukcja systemu telemetrycznego z zastosowaniem technologii internetowych wykorzystanie mikrokontrolera do realizacji akwizycji danych oraz zaimplementowanie w nim serwera WWW i serwera bazy danych
Komunikacja w mikrokontrolerach. Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski
 Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
RODZAJE PAMIĘCI RAM. Cz. 1
 RODZAJE PAMIĘCI RAM Cz. 1 1 1) PAMIĘĆ DIP DIP (ang. Dual In-line Package), czasami nazywany DIL - w elektronice rodzaj obudowy elementów elektronicznych, głównie układów scalonych o małej i średniej skali
RODZAJE PAMIĘCI RAM Cz. 1 1 1) PAMIĘĆ DIP DIP (ang. Dual In-line Package), czasami nazywany DIL - w elektronice rodzaj obudowy elementów elektronicznych, głównie układów scalonych o małej i średniej skali
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory DMA (Direct Memory Access) laboratorium: 05 autor: mgr inż. Katarzyna Smelcerz
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory DMA (Direct Memory Access) laboratorium: 05 autor: mgr inż. Katarzyna Smelcerz
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Technika mikroprocesorowa. W. Daca, Politechnika Szczecińska, Wydział Elektryczny, 2007/08
 Mikrokontrolery 16-bitowe Oferowane obecnie na rynku mikrokontrolery 16-bitowe opracowane zostały pomiędzy połowa lat 80-tych a początkiem lat 90-tych. Ich powstanie było naturalną konsekwencją ograniczeń
Mikrokontrolery 16-bitowe Oferowane obecnie na rynku mikrokontrolery 16-bitowe opracowane zostały pomiędzy połowa lat 80-tych a początkiem lat 90-tych. Ich powstanie było naturalną konsekwencją ograniczeń
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Moduł uruchomieniowy mikrokontrolera MC68HC912B32
 Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Instytut Cybernetyki Technicznej Systemy Mikroprocesorowe Moduł uruchomieniowy mikrokontrolera MC68HC912B32 Grzegorz Cielniak Wrocław 1999 1. Informacje ogólne Moduł uruchomieniowy jest tanim i prostym
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Technika mikroprocesorowa. W. Daca, Politechnika Szczecińska, Wydział Elektryczny, 2007/08
 Mikrokontrolery 8-bitowe Mikrokontrolery 8-bitowe stanowią wciąż najliczniejszą grupę mikrokontrolerów. Istniejące w chwili obecnej na rynku rodziny mikrokontrolerów opracowane zostały w latach 80-tych.
Mikrokontrolery 8-bitowe Mikrokontrolery 8-bitowe stanowią wciąż najliczniejszą grupę mikrokontrolerów. Istniejące w chwili obecnej na rynku rodziny mikrokontrolerów opracowane zostały w latach 80-tych.
Wbudowane układy peryferyjne cz. 3 Wykład 9
 Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
ZL5PIC. Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887
 ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
ZL5PIC Zestaw uruchomieniowy dla mikrokontrolerów PIC16F887 ZL5PIC jest uniwersalnym zestawem uruchomieniowym dla mikrokontrolerów PIC16F887 (oraz innych w obudowie 40-wyprowadzeniowej). Dzięki wyposażeniu
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Szczegółowy opis przedmiotu zamówienia. Część 1 - Laboratoryjny zestaw prototypowy
 Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop:
Załącznik nr 6 do SIWZ Szczegółowy opis przedmiotu zamówienia Ilość: 3 sztuki (kpl.) CPV 38434000-6 analizatory Część 1 - Laboratoryjny zestaw prototypowy Parametry urządzenia: Zintegrowany oscyloskop:
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024
 Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
Płytka ewaluacyjna z ATmega16/ATmega32 ARE0021/ARE0024 Płytka idealna do nauki programowania mikrokontrolerów i szybkiego budowanie układów testowych. Posiada mikrokontroler ATmega16/ATmega32 i bogate
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
SPECYFIKACJA ELEMENTÓW ELEKTRONICZNYCH
 SPECYFIKACJA ELEMENTÓW ELEKTRONICZNYCH Przetworniki (nadajniki) ultradźwiękowe, sztuk 1000 częstotliwość rezonansowa ok. 40 khz poziom ciśnienia akustycznego SPL generowanego przy zasilaniu 10 V na częstotliwości
SPECYFIKACJA ELEMENTÓW ELEKTRONICZNYCH Przetworniki (nadajniki) ultradźwiękowe, sztuk 1000 częstotliwość rezonansowa ok. 40 khz poziom ciśnienia akustycznego SPL generowanego przy zasilaniu 10 V na częstotliwości
Podstawowe informacje o STM8
 STM8S001J3 (1) Wprowadzenie. Pierwszy mikrokontroler STM8 w 8-nóżkowej obudowie Za sprawą układów STM32 firma STMicroelectronics stała się rozpoznawalna jako jeden z czołowych producentów mikrokontrolerów.
STM8S001J3 (1) Wprowadzenie. Pierwszy mikrokontroler STM8 w 8-nóżkowej obudowie Za sprawą układów STM32 firma STMicroelectronics stała się rozpoznawalna jako jeden z czołowych producentów mikrokontrolerów.
Sygnały DRQ i DACK jednego kanału zostały użyte do połączenia kaskadowego obydwu sterowników.
 Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Architektura harwardzka Architektura i organizacja systemu komputerowego Struktura i funkcjonowanie komputera procesor, rozkazy, przerwania
 Rok akademicki 2010/2011, Wykład nr 7 2/46 Plan wykładu nr 7 Informatyka 1 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr II, studia stacjonarne I stopnia Rok akademicki 2010/2011
Rok akademicki 2010/2011, Wykład nr 7 2/46 Plan wykładu nr 7 Informatyka 1 Politechnika Białostocka - Wydział Elektryczny Elektrotechnika, semestr II, studia stacjonarne I stopnia Rok akademicki 2010/2011
Cortex-M3 ST Microelectronics core processor capabilities. Możliwości procesorów z rdzeniem Cortex-M3 firmy ST Microelectronics
 Marcin Gąsiorek V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy Cortex-M3 ST Microelectronics core processor capabilities The paper presents the capabilities of the ARM Cortex-M3
Marcin Gąsiorek V rok Koło Naukowe Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy Cortex-M3 ST Microelectronics core processor capabilities The paper presents the capabilities of the ARM Cortex-M3
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Pasma częstotliwości ISM (ang. Industrial, Scientific, Transceiver) 2 Ogólne informacje dotyczące protokołu SimpliciTI Opracowanie Texas Instruments
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Pasma częstotliwości ISM (ang. Industrial, Scientific, Transceiver) 2 Ogólne informacje dotyczące protokołu SimpliciTI Opracowanie Texas Instruments
Architektura systemów komputerowych. dr Artur Bartoszewski
 Architektura systemów komputerowych dr Artur Bartoszewski Układy otoczenia procesora (chipset) Rozwiązania sprzętowe CHIPSET Podstawą budowy płyty współczesnego komputera PC jest Chipset. Zawiera on większość
Architektura systemów komputerowych dr Artur Bartoszewski Układy otoczenia procesora (chipset) Rozwiązania sprzętowe CHIPSET Podstawą budowy płyty współczesnego komputera PC jest Chipset. Zawiera on większość
Część 6. Mieszane analogowo-cyfrowe układy sterowania. Łukasz Starzak, Sterowanie przekształtników elektronicznych, zima 2011/12
 Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
Podstawy Techniki Mikroprocesorowej
 Podstawy Techniki Mikroprocesorowej Architektury mikroprocesorów Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Podstawy Techniki Mikroprocesorowej Architektury mikroprocesorów Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Propozycje dużego zadania zaliczeniowego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 29 listopada 2016 Wymagania ogólne Wymagamy osobistego
Programowanie mikrokontrolerów 2.0 Propozycje dużego zadania zaliczeniowego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 29 listopada 2016 Wymagania ogólne Wymagamy osobistego
Architektura Systemów Komputerowych. Rozwój architektury komputerów klasy PC
 Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
Architektura Systemów Komputerowych Rozwój architektury komputerów klasy PC 1 1978: Intel 8086 29tys. tranzystorów, 16-bitowy, współpracował z koprocesorem 8087, posiadał 16-bitową szynę danych (lub ośmiobitową
Architektury akceleratorów kryptograficznych opartych o układy programowalne. Marcin Rogawski
 Architektury akceleratorów kryptograficznych opartych o układy programowalne. Marcin Rogawski rogawskim@prokom.pl Plan referatu: Budowa akceleratora kryptograficznego; Struktura programowalna element fizyczny;
Architektury akceleratorów kryptograficznych opartych o układy programowalne. Marcin Rogawski rogawskim@prokom.pl Plan referatu: Budowa akceleratora kryptograficznego; Struktura programowalna element fizyczny;
Wykład 4. Interfejsy USB, FireWire
 Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
Wykład 4 Interfejsy USB, FireWire Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB Interfejs USB
XMEGA. Warsztaty CHIP Rok akademicki 2014/2015
 XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
Samba OPLC SM35-J-T20
 Karta katalogowa Samba OPLC SM35-J-T20 Unitronics SM35-J-T20 posiada wbudowane następujące wejścia/wyjścia: 12 wejść cyfrowych, które mogą zostać przekształcone w: o 3 szybkie wejścia licznikowe/enkoderowe
Karta katalogowa Samba OPLC SM35-J-T20 Unitronics SM35-J-T20 posiada wbudowane następujące wejścia/wyjścia: 12 wejść cyfrowych, które mogą zostać przekształcone w: o 3 szybkie wejścia licznikowe/enkoderowe
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Standard transmisji równoległej LPT Centronics
 Standard transmisji równoległej LPT Centronics Rodzaje transmisji szeregowa równoległa Opis LPT łącze LPT jest interfejsem równoległym w komputerach PC. Standard IEEE 1284 został opracowany w 1994 roku
Standard transmisji równoległej LPT Centronics Rodzaje transmisji szeregowa równoległa Opis LPT łącze LPT jest interfejsem równoległym w komputerach PC. Standard IEEE 1284 został opracowany w 1994 roku
Metody optymalizacji soft-procesorów NIOS
 POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
POLITECHNIKA WARSZAWSKA Wydział Elektroniki i Technik Informacyjnych Instytut Telekomunikacji Zakład Podstaw Telekomunikacji Kamil Krawczyk Metody optymalizacji soft-procesorów NIOS Warszawa, 27.01.2011
prowadzący: mgr inż. Piotr Prystupiuk
 prowadzący: mgr inż. Piotr Prystupiuk Instytut Tele- i Radiotechniczny WARSZAWA Zaawansowane technologie teleinformatyczne i systemy informatyczne do budowy zintegrowanych platform obsługi inteligentnych
prowadzący: mgr inż. Piotr Prystupiuk Instytut Tele- i Radiotechniczny WARSZAWA Zaawansowane technologie teleinformatyczne i systemy informatyczne do budowy zintegrowanych platform obsługi inteligentnych
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Architektura systemu komputerowego
 Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami
Zakres przedmiotu 1. Wstęp do systemów mikroprocesorowych. 2. Współpraca procesora z pamięcią. Pamięci półprzewodnikowe. 3. Architektura systemów mikroprocesorowych. 4. Współpraca procesora z urządzeniami