Procesory osadzone ETD 7211 W
|
|
|
- Jadwiga Nowicka
- 6 lat temu
- Przeglądów:
Transkrypt



1 Procesory osadzone ETD 7211 W
2 Peryferia przetwornik ADC - na przykładzie LPC2368 Parametry przetwornika ADC: 6 kanałów multipleksowany, konwersja od 3 do 10 bitów, zakres pomiarowy 0 3V, indywidualny rejestr wyniku dla każdego kanału, przetwarzanie na zasadzie sukcesywnej aproksymacji, czas przetwarzania ~ 2,44 µs ziarno: q=u/2 N = 3/1024 = 2,93 mv 2
3 Peryferia przetwornik DAC - na przykładzie LPC2368 Przetwornik DAC N = 10 bitów, V REF = 3,3V, 1 2,5µs µa 3

4 Peryferia port szeregowy RS232 - na przykładzie LPC2368 Zgodny ze standardem Szybkość transmisji: 1200, 2400, 4800, 9600, 19200, 57600, bitów/s 16-bit bufor dla nadawczo-odbiorczej kolejki FIFO UART1 tryb modemu 4




5 Peryferia port szeregowy RS232 - UART1 na przykładzie LPC2368 UART Universal Asynchronous Receiver Transmitter 3,3 V P +8 V stan IDLE bit startu bitów danych bit parzystości -8 V 5 LPC2368: UART0/2/3 UART1 możliwość budowy modemu bity stopu: 1, 2 lub 1.5



6 Zegar systemowy CLK kilka pf 6 Źródło sygnału: generator sygnałowy, rezonator kwarcowy częstotliwość sygnału zegarowego: 1 MHz 24 MHz
7
8 Dane MAM Memory Acceleration Module Zadanie: przyspieszenie dostępu do pamięci FLASH 8 Rdzeń ARM Interfejs adres 15 Pamięć FLASH Bufory Magistrala Local Bus 128 Pamięć RAM szybka Flash cykl zapis/odczyt ~50 ns Przy założeniu, że procesor działa przy 60 MHz, czas dostępu do pamięci to ~16,33 ns 128 bitowa organizacja pamięci odczyt czterech 32-bitowych rozkazów ARM lub osiem 16- bitowych Thumb Data Buffer Prefetch Buffer Branch Tail Buffer
9 Kod sekwencyjny Dane i skoki Zarówno dane i kod MAM Memory Acceleration Module TRYB 0 TRYB 1 TRYB 2 Rdzeń ARM Rdzeń ARM Rdzeń ARM MAM MAM MAM FLASH FLASH FLASH 9 MAM tryby pracy: całkowicie wyłączony (tylko Flash), częściowo włączony (Flash + MAM), całkowicie załączony (MAM)

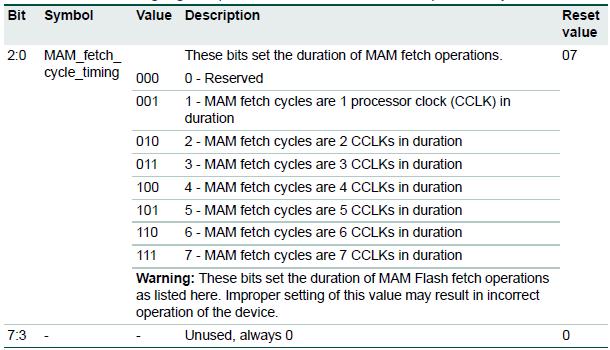



10 MAM Memory Acceleration Module MAM Control Register MMCR MAM Timing Register MAMTIM 10
11 Code Read Protection CRP - ochrona systemu Code Read Protection (CRP) mechanizm zabezpieczający oprogramowanie oraz sprzęt. W układach LPC dostępne są trzy różne poziomy ochrony. CRP jest wywoływany zapisem odpowiedniego wzorca: CRP1 (0x ) CRP2 (0x ) CRP3 (0x ) w pamięci pod adresem (0x000001FC). 11
12 Code Read Protection CRP - ochrona systemu, sprzętu CRP1 CRP2 CRP3 Dostęp do układu za pośrednictwem interfejsu JTAG zablokowany modyfikacja pamięci tylko w trybie ISP modyfikacja pamięci tylko w trybie ISP: odczyt, zapis, kopiowanie brak możliwości programowania ISP brak dostępu do pamięci RAM, poniżej adresu 0x modyfikacja pamięci jedynie przez program IAP In Application Programming brak możliwości modyfikacji sektora 0 12 możliwość wyczyszczenia całej zawartości pamięci możliwość wyczyszczenia całej zawartości pamięci brak możliwości wyczyszczenia pamięci, brak możliwości ponownego zapisu, testowania

13 13 Code Read Protection CRP - ochrona systemu, sprzętu
14 14 Procedura wejścia w tryb programowania ISP, ze sprawdzeniem CRP

15 Programator ISP układów LPC - konstrukcja niskobudżetowa
16 MEMMAP - Memory mapping - mapowanie pamięci Memory mapping - relokacja obszarów pamięci pod inny adres: - możliwość uruchomienia program z dowolnego obszaru pamięci, - przeniesione zostają wektory przerwań np. z Flash (0x ) do obszaru pamięci RAM (0x ) lub obszar bootloadera BOOT ROM AND FLASH 32 kb ON-CHIP STATIC RAM - w skrócie wewnętrzna pamięć RAM kb ON-CHIP NON-VOLATILE MEMORY - w skrócie wewnętrzna pamięć FLASH

17 17 MEMMAP - Memory mapping - mapowanie pamięci
18 Obniżony pobór mocy Układy LPC umożliwiają pracę w trybie obniżonego poboru mocy. Dostępne tryby: IDLE, Power Down, Sleep Mode, Deep Power-Down Mode IDLE Sleep Mode - wyłączony sygnał taktujący rdzeń - główny zegar wyłączony - wyłączony sygnał taktujący pamięć - pętla PLL zostaje automatycznie rozłączona - sygnał zegarowy podłączony do bloków obsługi przerwań - możliwość wznowienia pracy układu za pomocą RTC (działa zegar Hz) - pobór prądu na poziomie ma - pamięć FLASH w stanie podtrzymania - pobór prądu na poziomie µa 18
19 Obniżony pobór mocy Power Down - sygnał zegarowy całkowicie wyłączony Deep Power-Down - po wznowieniu działania, układ PLL oraz dzielniki sygnałów muszą zostać ponownie skonfigurowane - z trybu power down mikrokontroler mogą wyprowadzić jedynie te bloki, które do działania nie wymagają sygnału zegarowego - odłączone zostaje napięcia zasilające interfejsy logiczne - ekstremalnie niski pobór prądu - wznowienie działania: RTC lub RESET zewnętrzny 19

20 Obniżony pobór mocy - rejestry kontrolno-sterujące Rejestr umożliwiający sterowanie trybami obniżonego poboru mocy to: PCON Power Control wybór trybu pracy PCONP Power Control for Peripherals odłączenie bloków per. od CLK INTWAKE Interrupt Wakeup przypisanie urządzenia wybudzającego PCON BOD Brown-Out Detector - nadzorca linii zasilającej układ, - reset układu przy 2.6 V lub 2,9 20


21 Obniżony pobór mocy - INTWAKE 21

22 Obniżony pobór mocy - PCONP Power Control for Peripherals PCONP głównie redukcja mocy statycznej pobieranej przez układy 22
23 RTC Real Time Clock - zegar czasu rzeczywistego Sprzętowy zegar-kalendarz taktowany z rezonatora Hz, licznik sekund, minut, godzin, dni, miesięcy, lat, możliwość wygenerowania alarmu przerwania możliwość pracy w trybie Power Down Mode 23
24

25 25 RTC Real Time Clock - zegar czasu rzeczywistego
26 Peryferia SPI Serial Peripheral Interface - na przykładzie LPC2368 Parametry transmisji SPI: Brak arbitrażu, Dwukierunkowy interfejs, 4 linie kontrolne: MOSI, MISO, SCK, SSEL, Praca w trybie master lub slave, Tryb Master generuje sygnał SCK, Obsługa: Flash, A/C D/C, karty MMC itp 26
27 27 SPI diagram blokowy

28 28 Peryferia SPI
29 Peryferia SPI Tryb Master Nadawanie/Odbiór danych w trybie master: 1. Ustawienie rejestru zegara SPI tak by pracował on z wymaganą szybkością, 2. Ustawienie danych do rejestru sterującego SPI, 3. Wpisanie danej do transmisji wpisanie rozpoczyna wysyłanie danych 4. Czekanie na ustawienie flagi SPIF w rejestrze SPI po całym cyklu wysyłania danych 5. Odczytania rejestru statusowego SPI 6. Odczytanie danych z rejestru danych SPI (nie wymagane) 7. Powrót do punktu trzeciego w wypadku potrzeby wysłania większej ilości danych Uwaga: Wysyłanie lub odczyt z rejestru danych SPI jest wymagane wyzerowanie flagi statusowej SPI 29
 gdy nie występuje żadna operacja transferu po interfejsie SPI 3.")
30 Peryferia SPI Tryb Slave Nadawanie/Odbiór danych w trybie slave: 1. Ustawienie rejestru kontrolnego SPI do wymaganych ustawień, 2. Wpisanie do rejestru SPI danych potrzebnych do wysłania (jeśli potrzeba) gdy nie występuje żadna operacja transferu po interfejsie SPI 3. Czekanie na ustawienie flagi SPIF flaga zostanie ustawiona po zaakceptowaniu ostatniej danej z transferu SPI, 4. Odczytanie rejestru statusowego SPI 5. Odczytanie z rejestru danych SPI odebranych informacji 6. Powrót do punktu 2. gdy wymagany jest odczyt kolejnych danych Uwaga: przesyłanie danych jest możliwe w momencie aktywowania linii SSEL 30
31 Peryferia SPI Rejestry Do konfiguracji i kontroli magistrali SPI wykorzystywanych jest 5 głównych rejestrów: S0SPCR Rejestr kontrolny SPI S0SPSR Rejestr statusowy SPI S0SPDR Rejestr Danych SPI dwukierunkowy rejestr umożliwiający nadanie i odczyt danych z magistrali SPI S0SPCCR Rejestr Zegara SPI w trybie master S0SPINT Rejestr Flag SPI wykorzystywany w przerwaniach 31
32 Peryferia SPI Rejestry Zawartość rejestru S0SPCR - SPI Control Register 31: BITS SP LS MS CL CA B - BitEnable określa wysyłaną ilość bitów danych: 0 wysyła 8 bitów danych, 1 wysyła ilość danych zdefiniowanych na pozycji BITS CPHA określa fazę próbkowania danych: 0 dane próbkowane na zboczu aktywującym, 1 dane próbkowane na zboczu deaktywującym CPOL Określa polaryzację sygnału zegarowego: 0 aktywowanie w stanie wysokim, 1 aktywowany w stanie niskim MSTR wybór trybu pracy Master/Slave: 0 Slave, 1 Master LSBF wybór kierunku przepływu danych: 0 bit MSB [7] pierwszy, 1 bit LSB [0] pierwszy SPIE wybór aktywacji przerwań od interfejsu SPI: 0 przerwania są wyłączone, 1 przerwanie jest generowane za każdym razem gdy flagi SPIF lub MODF są aktywne 32
33 Peryferia SPI Rejestry Zawartość rejestru S0SPCR - SPI Control Register 31: BITS SP LS MS CL CA B - 33
34 Peryferia SPI Rejestry Zawartość rejestru S0SPSR - SPI Status Register 31: S W R M A - ABRT Slave Abort: ustawiony w momencie gdy sygnał SSEL zostanie dezaktywowany zanim dane zostaną przesłane, MODF - Mode Fault : ustawiany w momencie gdy sygnał SSEL zostanie aktywowany gdy SPI działa w trybie master, ROVR Read overrun : ustawiany w momencie gdy dane są odczytywane przez interfejs SPI w momencie gdy nie zostały one odczytane z rejestru danych, WCOL - Write Collision: ustawiany w momencie gdy dana jest wpisana do SPI ale komunikacja po interfejsie SPI trwa nadal SPIF - Data Transfer Complete: ustawiany w momencie gdy transmisja za pomocą interfejsu SPI zostanie zakończona flaga zostaje wyzerowana w momencie dostępu do rejestru SPDR 34
35 Peryferia SPI Rejestry Zawartość rejestru S0SPDR - SPI Data Register 31:16 31: Dane H DANE L Dane L dwukierunkowy rejestr odczytu i zapisu Dane H w momencie ustawienia w rejestrze SPCR bitu 2, i ustawianiu odpowiednio ilości bitów [8:11] możliwe jest wykorzystanie tej przestrzeni bitowej do wysyłania danych. Uwaga: w momencie ustawienia mniejszej ilości bitów niż 16, bity nie używane są zastępowane zerami (0) 35
 jest ustawiany w rejestrze PCLKSEL0 w sekcji dla PCLK_SPI.")
36 Peryferia SPI Rejestry Zawartość rejestru S0SPCCR - SPI Clock Counter Register 31:8 31:8 F CLK = P CLK SPCCR Counter Uwaga: Zegar taktujący SPI (Peripheral Clock) jest ustawiany w rejestrze PCLKSEL0 w sekcji dla PCLK_SPI. 36
37 Peryferia SPI Rejestry Zawartość rejestru S0SPINT - SPI Interrupt Register 31:8 31:8 7:1 0 - I I SPI Interrupt Flag: Flaga przerwania od SPI, ustawiana jest w momencie gdy SPI generuje przerwanie, Zerowane w momencie wpisania 1 w ten bit. Uwaga: tylko i wyłącznie gdy SPI Interrupt BIT jest w stanie wysokim oraz przerwanie od SPI0 w VIC jest w włączone (stan wysoki) 37
38 SSP
39 Peryferia SSP Synchronous Serial Port - na przykładzie LPC2368 Parametry transmisji SSP: Kompatybilność z trybami: Motorola SPI, 4-wire TI SSI, National Semiconductor Microwire Praca w trybie master lub slave, 8 ramek w trybie FIFO oba w trybie transmisji i odbioru danych Wspomaganie pracy w trybie DMA 39
40 40 PrimeCell SSP diagram blokowy
41 Peryferia SSP PIN SPI SSI Microwire SCK0/1 SCK CLK S K SSEL0/1 SSEL FS CS MISO0/1 MISO DR(M) SI(M) DX(S) SO(S) MOSI0/1 MOSI DX(S) SO(S) DR(M) SI(M) Serial Clock sygnał zegarowy używany do synchronizacji urządzeń podpiętych pod magistralę, urzadzenie w trybie MASTER generuje ten sygnał Frame Sync/Slave Select sygnał generowany na krótko przed wywołaniem transmisji (SSPn) Master In Slave Out z Slave do Master, W momencie wyboru urządzenia jako Slave i bir SSEL/FS nie jest w stanie wysokim, Slave nie będzie nadawać danych. Master Out Slave In dane wysyłane od mastera do slave a 41
42 Peryferia - SSP Texas Instruments Synchronous Serial 42 Texas Instruments Synchronous Serial Frame Format
43 Peryferia - SSP SPI Format: CPOL=0 i CPHA=0 43
44 Peryferia - SSP SPI Format: CPOL=1 and CPHA=0 44
45 Peryferia - SSP SPI Format: CPOL=1 and CPHA=1 45
46 Peryferia - SSP Microwire Frame Format 46 8 bitowe słowo nadawcze 4 16 bitów danych odbiorczych Całkowita ramka od 13 do 25 bitów
47 Peryferia SSP Rejestry Do konfiguracji i kontroli magistrali SSP wykorzystywanych jest 10 głównych rejestrów: CR0 Control Register 0: Rejestr kontroli magistrali SSP CR1 Control Register 1: Rejestr kontroli magistrali SSP DR Data Register: Rejestr danych SR Status Register: Rejestr statusowy CPSR Clock Prescale Register: Rejestr Preskalera IMSC Interrupt Mask Set and Clear Register: Rejestr Przerwań RIS Raw Interrupt Status Register MIS Masked Interrupt Status Register ICR SSPICR Interrupt Clear Register DMACR DMA Control Register: Rejestr kontroli DMA dla kolejki Rx i Tx FIFO 47

48 Peryferia SSP Rejestry Zawartość rejestru SSP0DR - SSP Data Register 31:16 31: DANE Dane dwukierunkowy rejestr odczytu i zapisu 48
49 Peryferia SSP Rejestry Zawartość rejestru SSP0DR - SSP Data Register 31:16 31: DANE Dane dwukierunkowy rejestr odczytu i zapisu Zawartość rejestru SSP0CPSR - SPI Clock Prescale Register 31:8 31: CPSDVSR Uwaga: CPSDVSR min = 2 49
50 Peryferia SSP Rejestry Zawartość rejestru SSP0CR0 - SSP Control Register 0 31: SCR CA CL FRF DSS DSS - Data Size Select: wybór wielkości ramki danych 0011: 4bit 1111: 16bit-ów FRF - Frame Format: Wybór trybu transmisji danych: 00 SPI, 01 TI, 10 Microwire, 11 nie wspierana CPOL Określa polaryzację sygnału zegarowego: 0 aktywowanie w stanie wysokim, 1 aktywowany w stanie niskim CPHA Określa fazę próbkowania danych: 0 dane próbkowane na zboczu aktywującym, 1 dane próbkowane na zboczu deaktywującym SCR Serial Clock Rate: CPSDVSR znajduje się w rejestrze SSP0CPSR 50 F CLK = P CLK (CPSDVSR [SCR+1])
51 Peryferia SSP Rejestry Zawartość rejestru SSP0CR1 - SSP Control Register 1 31: SO MS S L LBM - Loop Back Mode: Dane pobierane są z wyjścia do wejścia i z wejścia do wyjścia. SSE - SSP Enable: 0 kontroler SSP jest wyłączony, 1 kontroler SSP będzie komunikować się z innymi urządzeniami na magistrali. Wszystkie inne rejestry powinny zostać ustawione, zanim na ten bit zostanie wpisana 1 MS Master/Slave Mode: wybór trybu pracy Master/Slave: 0 Master, 1 Slave!! SOD Slave Output Disable: przez ustawienie w stan wysoki istnieje możliwość blokowania wysyłania danych w trybie Slave (MS 1) 51
52 Peryferia SSP Rejestry Zawartość rejestru SSP0CSR - Status Register 31: BS RF RN TN TF TFE Transmit FIFO Empty: flaga ustawiana jest w momencie gdy kolejka FIFO do transmisji jest pusta TNF Transmit FIFO Not Full: flaga jest w stanie niskim gdy kolejka Tx FIFO jest pełna, stan wysoki sygnalizuje że nie jest pełna RNE Receive FIFO Not Empty: flaga jest w stanie niskim gdy kolejka FIFO do odbioru danych jest pełna, stan wysoki sygnalizuje że nie jest pełna RFF Receive FIFO Full: flaga ustawiana jest w momencie gdy kolejka FIFO do odbioru jest pełna BSY Busy: flaga jest zerowa w trybie IDLE, a ustawiona w momencie wysyłania/odbioru danych lub/i Tx FIFO NIE jest PUSTA 52 Uwaga: Rejestr służy tylko do odczytu flag statutowych
53 Peryferia SSP Rejestry Zawartość rejestru SSPnIMSC - Interrupt Mask Set/Clear Register 31: TX RX RT RO RORIM uaktywnienie przerwań gdy nastąpi przepełnienie kolejki odbioru Rx FIFO, a następna dana nadpisze już istniejące RTIM uaktywnienie przerwań w momencie nastąpienia przekroczenia czasu przy odbiorze danych. Zdarzenie, to nastąpi w momencie gdy kolejka odbioru Rx FIFO nie jest pusta, a przekroczony zostanie czas odbioru danych. RXIM uaktywnienie przerwań w momencie gdy kolejka odbioru Rx FIFO jest co najmniej w połowie pełna TXIM uaktywnienie przerwań w momencie gdy kolejka transmisji Tx FIFO jest co najmniej w połowie pusta 53 Uwaga: Maskowanie oznacza aktywację obsługi przerwań!!
54 Peryferia SSP Rejestry SSPnIMSC - Interrupt Mask Set/Clear Register 31: TX RX RT RO Zawartość rejestru SSP0ICR - Interrupt Clear Register 31: RT RO 54 RORIM Zerowanie przerwania w momencie gdy nastąpi przepełnienie kolejki odbioru Rx FIFO, a następna dana nadpisze już istniejące RTIM Zerowanie przerwania w momencie gdy nastąpieni przekroczenie czasu przy odbiorze danych. Zdarzenie, to nastąpi w momencie gdy kolejka odbioru Rx FIFO nie jest pusta, a przekroczony zostanie czas odbioru danych.
55 55 Dziękuję za uwagę
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Mikroprocesory i mikrosterowniki Wydział Elektroniki Mikrosystemów i Fotoniki Politechniki Wrocławskiej Ćwiczenie nr 4
 1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
1 Ćwiczenie nr 4 Program ćwiczenia: Interfejs szeregowy SPI obsługa sterownika ośmiopozycyjnego, 7-segmentowego wyświetlacza LED Interfejs szeregowy USART, komunikacja mikrokontrolera z komputerem PC.
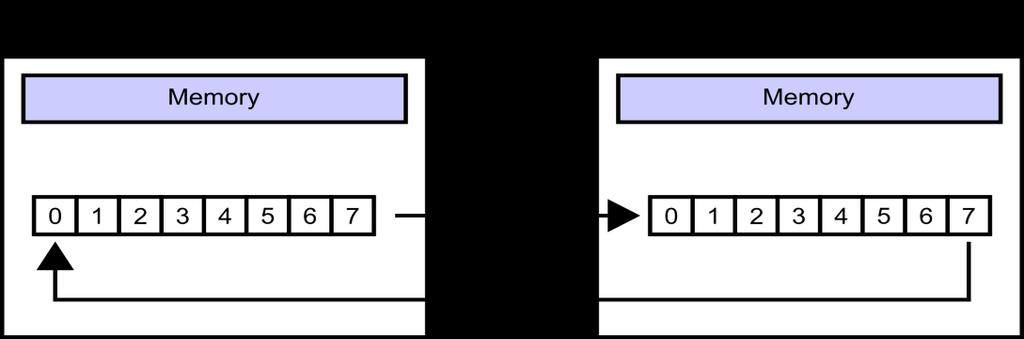
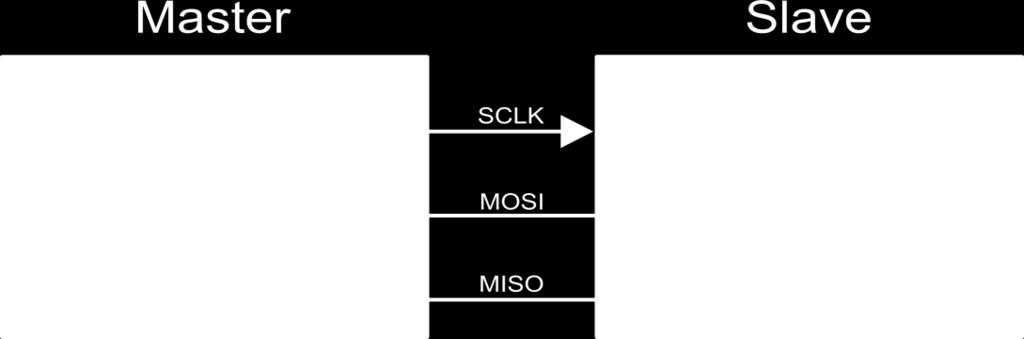
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Interfejsy można podzielić na synchroniczne (oddzielna linia zegara), np. I 2 C, SPI oraz asynchroniczne, np. CAN W rozwiązaniach synchronicznych
16. Szeregowy interfejs SPI
 16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
16. Szeregowy interfejs SPI Szeregowy interfejs SPI (Serial Peripherial Interface) służy do dwukierunkowej (full-duplex), synchronicznej transmisji danych pomiędzy mikrokontrolerem, a zewnętrznymi układami
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Współpraca procesora ColdFire z urządzeniami peryferyjnymi
 Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Współpraca procesora ColdFire z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe:
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
MAGISTRALE MIKROKONTROLERÓW (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska") (BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
(BSS) Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Odległości pomiędzy źródłem a odbiorcą informacji mogą być bardzo zróżnicowane, przykładowo zaczynając od pojedynczych milimetrów w przypadku
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Zaliczenie Termin zaliczenia: Sala IE 415 Termin poprawkowy: > (informacja na stronie:
 Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
Zaliczenie Termin zaliczenia: 14.06.2007 Sala IE 415 Termin poprawkowy: >18.06.2007 (informacja na stronie: http://neo.dmcs.p.lodz.pl/tm/index.html) 1 Współpraca procesora z urządzeniami peryferyjnymi
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
MIKROKONTROLERY - MAGISTRALE SZEREGOWE
 Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Liczba magistral szeregowych jest imponująca RS232, i 2 C, SPI, 1-wire, USB, CAN, FireWire, ethernet... Równie imponująca jest różnorodność protokołow komunikacyjnych. Wiele mikrokontrolerów ma po kilka
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Podstawy systemów mikroprocesorowych. Interfejs USART. Interfejsy szeregowe w mikrokontrolerach AVR
 Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
Podstawy systemów mikroprocesorowych Wykład nr 4 Interfejsy szeregowe dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Komputery przesyłają dane na dwa sposoby: równolegle: Kilka bitów danych
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Programowanie Układów Logicznych kod kursu: ETD6203. Komunikacja z układami cyfrowymi W dr inż. Daniel Kopiec
 Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Programowanie Układów Logicznych kod kursu: ETD6203 Komunikacja z układami cyfrowymi W5 30.03.2016 dr inż. Daniel Kopiec Plan wykładu 1 2 3 4 5 6 Standard komunikacji RS232 Enkoder obrotowy Wyświetlacz
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wstęp. Opis ATMEGA128 MINI MODUŁ VE-APS-1406
 ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Charakterystyka mikrokontrolerów
 Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
Charakterystyka mikrokontrolerów 1. Historia powstania Pierwszym mikrokontrolerem (a nie mikroprocesorem) był wyprodukowany pod koniec roku 1972 przez Texas Instruments procesor TMS1000. Łączył on w sobie
(przykład uogólniony)
") Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Serial Peripheral Interface (przykład uogólniony) Brak standardu. Inne stosowane nazwy: Synchronous Serial Port (SSP), 4 wire SSI (Synchronous Serial Interface, Texas Instrument), Microwire (National Semiconductor).
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Wykład 10. Komunikacja
 Interfejsy komunikacji szeregowej Universal Asynchronous Receiver/Transmitter (UART) Synchronous Serial Interface (SSI) Inter-Integrated Circuit (I2C) Ethernet Universal Asynchronous Receiver/Transmitter
Interfejsy komunikacji szeregowej Universal Asynchronous Receiver/Transmitter (UART) Synchronous Serial Interface (SSI) Inter-Integrated Circuit (I2C) Ethernet Universal Asynchronous Receiver/Transmitter
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Mikroprocesory i Mikrosterowniki Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na
Programowanie Mikrokontrolerów
 Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Programowanie Mikrokontrolerów Wyświetlacz alfanumeryczny oparty na sterowniku Hitachi HD44780. mgr inż. Paweł Poryzała Zakład Elektroniki Medycznej Alfanumeryczny wyświetlacz LCD Wyświetlacz LCD zagadnienia:
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Programowalne układy logiczne kod kursu: ETD Układy sekwencyjne W
 Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Programowalne układy logiczne kod kursu: ETD008270 Układy sekwencyjne W6 10.05.2019 mgr inż. Maciej Rudek Układy kombinacyjne - przypomnienie Układ kombinacyjny jest to układ dla którego zmiana na wejściu
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Ultradźwiękowy generator mocy MARP wersja Dokumentacja techniczno-ruchowa
 Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
Przedsiębiorstwo Badawczo-Produkcyjne OPTEL Sp. z o.o. ul. Otwarta 10a PL-50-212 Wrocław tel.: +48 (071) 329 68 54 fax.: +48 (071) 329 68 52 e-mail: optel@optel.pl http://www.optel.pl Ultradźwiękowy generator
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Komunikacja w mikrokontrolerach. Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface
 Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Komunikacja w mikrokontrolerach Magistrala szeregowa I2C / TWI Inter-Integrated Circuit Two Wire Interface Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie
Dokumentacja Techniczna. Czytnik RFID UW-M4GM
 Dokumentacja Techniczna Czytnik RFID UW-M4RM UW-M4GM -man-2 1 WPROWADZENIE... 3 2 DANE TECHNICZNE... 4 3 OPIS ELEMENTÓW OBUDOWY... 5 4 KOMENDY PROTOKÓŁU MODBUS RTU... 6 4.1 Adresy MODBUS...7 2 1 Wprowadzenie
Dokumentacja Techniczna Czytnik RFID UW-M4RM UW-M4GM -man-2 1 WPROWADZENIE... 3 2 DANE TECHNICZNE... 4 3 OPIS ELEMENTÓW OBUDOWY... 5 4 KOMENDY PROTOKÓŁU MODBUS RTU... 6 4.1 Adresy MODBUS...7 2 1 Wprowadzenie
Wbudowane układy peryferyjne cz. 1 Wykład 7
 Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Systemy Czasu Rzeczywistego Zastosowanie interfejsów SPI i I2C do komunikacji laboratorium: 02 autor: mgr inż. Paweł
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
Laboratorium Ćwiczenie 3 Magistrala I 2 C Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem przy użyciu magistrali I 2 C. Zagadnienia do przygotowania: podstawy
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Struktura QSM (Queued Serial Module)
") Struktura QSM (Queued Serial Module) MW-ZPCiR-ICT-PWr 1 Nadajnik transmisji asynchronicznej (SCI) MW-ZPCiR-ICT-PWr 2 Odbiornik transmisji asynchronicznej (SCI) MW-ZPCiR-ICT-PWr 3 SCIbaud 32 f SYS SCBR
Struktura QSM (Queued Serial Module) MW-ZPCiR-ICT-PWr 1 Nadajnik transmisji asynchronicznej (SCI) MW-ZPCiR-ICT-PWr 2 Odbiornik transmisji asynchronicznej (SCI) MW-ZPCiR-ICT-PWr 3 SCIbaud 32 f SYS SCBR
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Podstawy systemów mikroprocesorowych
 Podstawy systemów mikroprocesorowych Wykład nr 6 Wszystko, co jeszcze chcielibyście wiedzieć o mikrokontrolerach, ale wolicie nie pytać (bo jeszcze będzie na kolokwium?) dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html
Podstawy systemów mikroprocesorowych Wykład nr 6 Wszystko, co jeszcze chcielibyście wiedzieć o mikrokontrolerach, ale wolicie nie pytać (bo jeszcze będzie na kolokwium?) dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html
Współpraca procesora z urządzeniami peryferyjnymi
 Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Współpraca procesora z urządzeniami peryferyjnymi 1 Współpraca procesora z urządzeniami peryferyjnymi Interfejsy dostępne w procesorach rodziny ColdFire: Interfejs równoległy, Interfejsy szeregowe: Interfejs
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
WYKŁAD 5. Zestaw DSP60EX. Zestaw DSP60EX
 Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Zestaw DSP60EX Karta DSP60EX współpracuje z sterownikiem DSP60 i stanowi jego rozszerzenie o interfejs we/wy cyfrowy, analogowy oraz użytkownika. Karta z zamontowanym sterownikiem pozwala na wykorzystanie
Układ transmisji szeregowej AVR
 Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Zewnętrzne układy peryferyjne cz. 1 Wykład 12
 Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zewnętrzne układy peryferyjne cz. 1 Wykład 12 Wyświetlacz LCD zgodny z HD44780 Wyświetlacz LCD zgodny z HD44780 2 HD44780 Standardowy sterownik alfanumerycznych wyświetlaczy LCD opracowany przez firmę
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Wykład 2. Przegląd mikrokontrolerów 8-bit: -AVR -PIC
 Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Wykład 2 Przegląd mikrokontrolerów 8-bit: -AVR -PIC Mikrokontrolery AVR Mikrokontrolery AVR ATTiny Główne cechy Procesory RISC mało instrukcji, duża częstotliwość zegara Procesory 8-bitowe o uproszczonej
Przetworniki analogowo-cyfrowe (A/C)
") Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Kod produktu: MP01105
 MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
MODUŁ INTERFEJSU KONTROLNO-POMIAROWEGO DLA MODUŁÓW Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs kontrolno-pomiarowy do podłączenia modułów takich jak czujniki temperatury, moduły przekaźnikowe,
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola
 Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Sygnały DRQ i DACK jednego kanału zostały użyte do połączenia kaskadowego obydwu sterowników.
 Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Płyty główne Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Układ DMA Układ DMA zawiera dwa sterowniki przerwań 8237A połączone kaskadowo. Każdy sterownik 8237A
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 4
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układy DMA, przetwornik cyfrowo-analogowy, transmisja
Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1.
 Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Procesory osadzone ETD 7211 ADC, DAC, UART, CLK W
 Procesory osadzone ETD 7211 ADC, DAC, UART, CLK W5 19.11.2018 Load and stroe Programowanie Zapis w C: IOSET1=0x00008000; IOSET1 = (1
Procesory osadzone ETD 7211 ADC, DAC, UART, CLK W5 19.11.2018 Load and stroe Programowanie Zapis w C: IOSET1=0x00008000; IOSET1 = (1
UW-DAL-MAN v2 Dotyczy urządzeń z wersją firmware UW-DAL v5 lub nowszą.
 Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Dokumentacja techniczna -MAN v2 Dotyczy urządzeń z wersją firmware v5 lub nowszą. Spis treści: 1 Wprowadzenie... 3 2 Dane techniczne... 3 3 Wyprowadzenia... 3 4 Interfejsy... 4 4.1 1-WIRE... 4 4.2 RS232
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura Systemów Komputerowych. Transmisja szeregowa danych Standardy magistral szeregowych
 Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Architektura Systemów Komputerowych Transmisja szeregowa danych Standardy magistral szeregowych 1 Transmisja szeregowa Idea transmisji szeregowej synchronicznej DOUT Rejestr przesuwny DIN CLK DIN Rejestr
Instrukcja MM-717 Tarnów 2010
 Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
Instrukcja MM-717 Tarnów 2010 Przeznaczenie modułu komunikacyjnego MM-717. Moduł komunikacyjny MM-717 służy do realizacji transmisji z wykorzystaniem GPRS pomiędzy systemami nadrzędnymi (systemami SCADA)
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Tab. 1. Zestawienie najważniejszych parametrów wybranych mikrokontrolerów z rodziny LPC2100, które można zastosować w zestawie ZL3ARM.
 ZL3ARM płytka bazowa dla modułu diparm_2106 (ZL4ARM) ZL3ARM Płytka bazowa dla modułu diparm_2106 Płytkę bazową ZL3ARM opracowano z myślą o elektronikach chcących szybko poznać mozliwości mikrokontrolerów
ZL3ARM płytka bazowa dla modułu diparm_2106 (ZL4ARM) ZL3ARM Płytka bazowa dla modułu diparm_2106 Płytkę bazową ZL3ARM opracowano z myślą o elektronikach chcących szybko poznać mozliwości mikrokontrolerów
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Konfigurator Modbus. Instrukcja obsługi programu Konfigurator Modbus. wyprodukowano dla
 Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30
 Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30 Zastosowanie służy do podłączania ciepłomierzy do sieci Modbus RTU przy użyciu interfejsu EIA- 485 Właściwości Galwanicznie izolowany interfejs
Moduł komunikacyjny Modbus RTU do ciepłomierza SonoMeter 30 Zastosowanie służy do podłączania ciepłomierzy do sieci Modbus RTU przy użyciu interfejsu EIA- 485 Właściwości Galwanicznie izolowany interfejs
Wykład 12. Przetwornik ADC
 Wykład 12 Przetwornik Przetwornik analogowo-cyfrowy () Moduł w mikrokontrolerach Stellaris posiada rozdzielczość 10-bitów i cztery kanały wejściowe oraz dodatkowo wewnętrzny czujnik temperatury. Moduł
Wykład 12 Przetwornik Przetwornik analogowo-cyfrowy () Moduł w mikrokontrolerach Stellaris posiada rozdzielczość 10-bitów i cztery kanały wejściowe oraz dodatkowo wewnętrzny czujnik temperatury. Moduł
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy
 Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x
 ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
ZL9ARM płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x ZL9ARM Płytka bazowa dla modułów diparm z mikrokontrolerami LPC213x/214x 1 ZL9ARM to uniwersalna płyta bazowa dla modułów diparm
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Interfejsy komunikacyjne Interfejs Urządzenie elektroniczne lub optyczne pozwalające na komunikację
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32
 Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Konfiguracja i programowanie Gamepad'a PlayStation2 na mikrokontrolerze STM32 Autor: Dawid Lubomski Data opracowania streszczenia (wersja 2): 23.04.2018 Data wygłoszenia referatu: 06.04.2018 Wprowadzenie
Wydział Elektryczny. Katedra Automatyki i Elektroniki. Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 ZEGAR CZASU RZECZYWISTEGO Ćwiczenie 4 Opracował: dr inŝ.
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: SYSTEMY CYFROWE 1 ZEGAR CZASU RZECZYWISTEGO Ćwiczenie 4 Opracował: dr inŝ.
OPROGRAMOWANIE FIRMWARE INTERFEJSU ETHERNETOWEGO UNIV
 OPROGRAMOWANIE FIRMWARE INTERFEJSU ETHERNETOWEGO 1. Cechy Oprogramowanie firmware dla Interfejsu ethernetowego UNIV 3.102.0.x. Moduł jest przeźroczysty dla wszystkich wiadomości transmitowanych z magistrali
OPROGRAMOWANIE FIRMWARE INTERFEJSU ETHERNETOWEGO 1. Cechy Oprogramowanie firmware dla Interfejsu ethernetowego UNIV 3.102.0.x. Moduł jest przeźroczysty dla wszystkich wiadomości transmitowanych z magistrali
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011
 Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
Obługa czujników do robota śledzącego linie. Michał Wendland 171628 15 czerwca 2011 1 Spis treści 1 Charakterystyka projektu. 3 2 Schematy układów elektronicznych. 3 2.1 Moduł czujników.................................
2. Budowa układów procesorowych rodziny TMS320C
 3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.