Hardware mikrokontrolera X51
|
|
|
- Sabina Krupa
- 7 lat temu
- Przeglądów:
Transkrypt

1 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego
 Klasyczna maksymalna częstotliwość zegara wynosi 12 Mhz...... lecz współczesne wersje są często dużo szybsze")
2 Hardware mikrokontrolera X51 (zegar) Mikrokontroler zawiera wewnętrzne układy zegara systemowego Jeden cykl maszynowy trwa zwykle 12 okresów zegara Są odmiany procesora wykonujące cykl w ciągu okresów... Wtedy zwykle możliwe jest przełączanie prędkości (dodatkowy SFR) Klasyczna maksymalna częstotliwość zegara wynosi 12 Mhz lecz współczesne wersje są często dużo szybsze
3 Hardware mikrokontrolera X51 (porty równoległe) Mikrokontroler zawiera cztery ośmiobitowe porty równoległe P0..P3. Porty są dwukierunkowe. Dostęp do portów następuje poprzez odczyt/zapis odpowiednich SFR. Czytanie z portu jest możliwe po uprzednim zapisie jedynki. Porty P0 i P2 są używane także do dostępu do pamięci zewnętrznej. W takim wypadku praktycznie nie da się ich używać w innym celu.
4 (połączenie pamięci zewnętrznej)
5 (porty równoległe) W niektórych wersjach mikrokontrolerów porty mają wyrafinowane charakterystyki elektryczne. Możliwy jest odczyt i zapis portu jedną instrukcją. Warto się zastanowić jakie będą skutki wykonania takiej instrukcji. Czytają one zatrzask portu, a nie linię wejściową! Struktura portu P1 (najprostszego)
6 (liczniki) Mikrokontrolery x51 zawierają dwa 16 bitowe uniwersalne liczniki, T0 i T1, które mogą być indywidualnie zaprogramowane jako zegary lub liczniki zdarzeń. Przy pracy jako zegary zliczają pewien okres czasu (a właściwie pewną liczbę okresów zegara systemowego), a następnie generują przerwanie. Przy pracy jako liczniki odliczają określoną liczbę opadających zboczy sygnału na wejściu, a następnie generują przerwanie.
7 (liczniki) W podstawowym 16 bitowym trybie pracy rejestry liczników TLx i THx są połączone kaskadowo. Ustawienie bitu TRx uruchamia licznik poprzez przyłączenia źródła sygnału na wejście TLx. Przepełnienie TLx powoduje inkrementowanie THx. Przepełnienie THx powoduje ustawienie wskaźnika TFx i ewentualne wygenerowanie przerwania. Rejestry THx i TLx mogą być pisanie i czytane, ale na okres trwania tej operacji trzeba wyzerować TRx, w przeciwnym wypadku rezultaty mogą być nieokreślone. Bit C/Tx wybiera źródło sygnału dla licznika. Gdy jest równy 0 będzie to zegar systemowy podzielony przez 12. Równy 1 wybierze wejście zewnętrzne.

8 (liczniki tryb pracy 0) Tryb pracy 0 (określony przez bity M0x i M1x) oznacza licznik ośmiobitowy THx poprzedzony preskalerem modulo 32 zrealizowanym na niższych pięciu bitach rejestru TLx.
9 (liczniki tryb pracy 1) Tryb pracy 1 (określony przez bity M0x i M1x) jest podobny do trybu 0, ale jest 16 bitowy i używa pełnego rejestru TLx.

10 (liczniki tryb pracy 2) Tryb pracy 2 (określony przez bity M0x i M1x) jest trybem ośmiobitowym. Rolę licznika pełni rejestr TLx, automatycznie ładowany przy przepełnieniu zawartością rejestru THx.

11 (liczniki tryb pracy 3) Tryb pracy 3 (określony przez bity M0x i M1x) konfiguruje T0 jako dwa liczniki ośmiobitowe. Drugi licznik może przy tym pełnić tylko rolę zegara. Licznik T1 jest w tym trybie zatrzymany.
12 (port szeregowy) Port szeregowy może pracować w trybie synchronicznym (tryb 0)... lub dupleksowym asynchronicznym (tryby 1, 2 i 3). Dane odbierane posiadają jednopoziomowy bufor. Dane wysyła się i odbiera za pomocą rejestru SBUF. Zapis bajtu do SBUF powoduje jego wysłanie. Bajt odebrany jest dostępny poprzez odczyt rejestru SBUF.

13 (port szeregowy tryb 0) Dane są nadawane i odbierane przez linię RxD. Linia TxD nadaje przebieg zegara taktującego transmisję. Kierunek transmisji określa rejestr SCON. 8 bitów danych jest nadawanych/odbieranych w poczynając od LSB. Prędkość jest stała, równa 1/12 zegara systemowego.


14 (port szeregowy tryb 0) Nadawanie Odbieranie
, osiem bitów danych i bit stopu (logiczna 1).")
15 (port szeregowy tryb 1) 10 bitów jest nadawanych przez TxD (lub odbieranych przez RxD). Są to: bit startu (logiczne 0), osiem bitów danych i bit stopu (logiczna 1). Przy odbiorze bit stopu trafia do RB8 w rejestrze SCON Prędkość transmisji jest określona przez licznik T1
 Nadawanie")
16 (port szeregowy tryb 1) Nadawanie Odbieranie
17 (port szeregowy tryb 2) 11 bitów jest nadawanych przez TxD (lub odbieranych przez RxD). Są to: bit startu (logiczne 0), dziewięć bitów danych i bit stopu (logiczna 1). Dziewiąty bit znajduje się na pozycjach TB8/RB8 w rejestrze SCON. Bit stopu jest ignorowany. Prędkość transmisji wynosi 1/32 lub 1/64 zegara systemowego.


18 (port szeregowy tryb 2) Nadawanie Odbieranie
19 (port szeregowy tryb 3) 11 bitów jest nadawanych przez TxD (lub odbieranych przez RxD). Są to: bit startu (logiczne 0), dziewięć bitów danych i bit stopu (logiczna 1). Dziewiąty bit znajduje się na pozycjach TB8/RB8 w rejestrze SCON. Bit stopu jest ignorowany. Prędkość transmisji jest programowana za pomocą licznika T1.
20 (port szeregowy programowanie prędkości) W trybach 1 i 3 prędkość portu szeregowego jest programowana licznikiem T1. Prędkość wynosi V=(2^(SMOD) / 32)*(1/(okres T1) Najczęściej używa się T1 w trybie 2 automatycznie przeładowywanego timera. Wtedy V=(2^(SMOD) / 32) * (Fosc / (12*(265 TH1))) Warto dobrać rozsądną częstotliwość kwarcu oscylatora...
21 (port szeregowy programowanie prędkości)
22 (port szeregowy uwagi na marginesie) Współczesne wersje μc 8051 mają często porty szeregowe o jeszcze bardziej złożonej strukturze... Są wersje X51 umożliwiające osobne definiowanie prędkości TxD i RxD. Niektóre wersje X51 umożliwiają automatyczne wykrywanie adresu. Często kontrolery X51 zawierają wiele portów szeregowych. Porty szeregowe miewają wiele wyrafinowanych możliwości...
23 (przerwania) Przerwanie jest automatycznym wywołaniem specjalnej procedury. Procedura ta jest umieszczona pod odpowiednim, stałym adresem. Obsługa przerwania kończy się specjalnym rozkazem RETI. Procedura przerwania musi zadbać o zachowanie używanych zasobów. Często używa się do tego celu alternatywnych banków rejestrów.
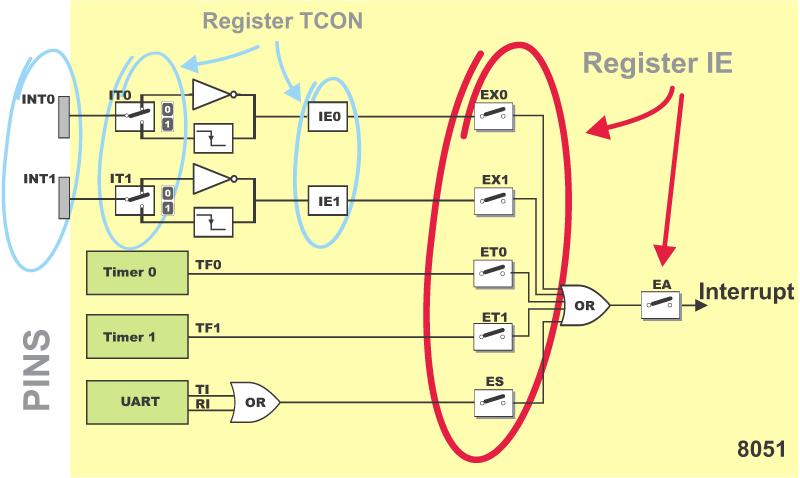
24 (przerwania)
25 (przerwania zgłoszone jednocześnie) W przypadku jednoczesnego zgłoszenia przerwań pierwsze obsługiwane jest... przerwanie o wyższym priorytecie... w ramach jednego priorytetu:
26 (generacja przerwania) Przerwanie wygeneruje wywołanie procedury obsługi (LCALL) gdy NIE jest wykonywana procedura obsługi o jednakowym lub wyższym priorytecie, wykonywana instrukcja RETI, wykonywany dostęp do rejestru EI lub IP. Przerwanie niekiedy czyści flagi, które je wygenerowały: nie są czyszczone flagi portu szeregowego. flagi przerwań zewnętrznych są czyszczone gdy aktywowane są zboczem.
27 (generacja przerwania) Wygenerowany przez przerwanie rozkaz wywołania (LCALL)... zachowuje na stosie aktualny licznik programu (dwa bajty)... przekazuje sterowanie pod odpowiedni adres wektora przerwań. Rozkaz RETI... odtwarza licznik programu... informuje o zakończeniu obsługi. Przerwanie IE0 TF0 IE1 TF1 RI oraz TI Adres wektora 0003h 000Bh 0013h 001Bh 0023h
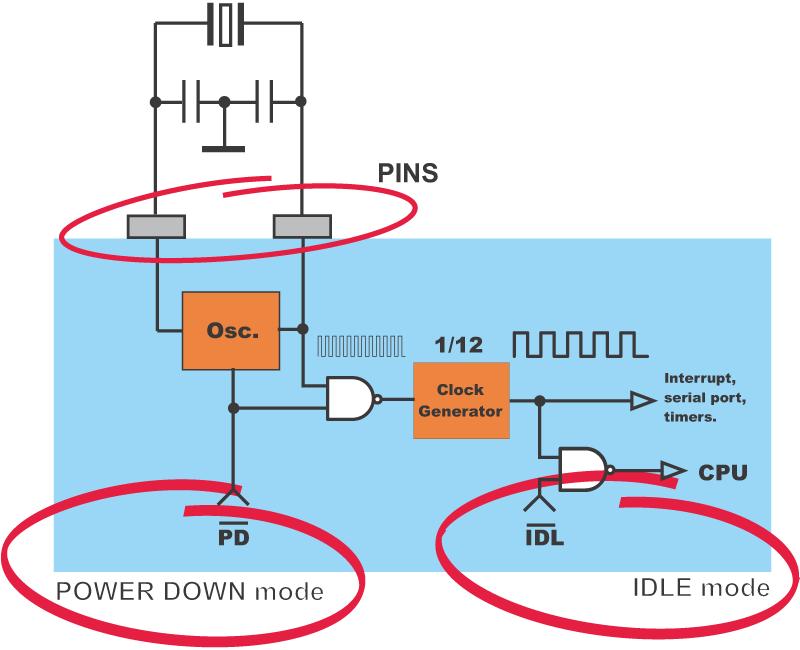
28 (kontrola zasilania)

29 (kontrola zasilania) By wejść w tryb idle lub power down należy - wpisać jedynkę na odpowiedniej pozycji rejestru PCON Wyjście z trybu idle jest możliwe poprzez przerwanie lub reset Wyjście z trybu power down jest możliwe tylko przez reset
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51
 Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
Architektura mikrokontrolera MCS51 Ryszard J. Barczyński, 2018 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Architektura mikrokontrolera
MIKROPROCESORY architektura i programowanie
 Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Struktura portów (CISC) Port to grupa (zwykle 8) linii wejścia/wyjścia mikrokontrolera o podobnych cechach i funkcjach Większość linii we/wy może pełnić dwie lub trzy rozmaite funkcje. Struktura portu
Przerwania w architekturze mikrokontrolera X51
 Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
Przerwania w architekturze mikrokontrolera X51 (przykład przerwanie zegarowe) Ryszard J. Barczyński, 2009 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku
MIKROPROCESORY architektura i programowanie
 Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Systematyczny przegląd. (CISC) SFR umieszczane są w wewnętrznej pamięci danych (80H 0FFH). Adresowanie wyłącznie bezpośrednie. Rejestry o adresach podzielnych przez 8 są też dostępne bitowo. Adres n-tego
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Obsługa portu szeregowego laboratorium: 05 autor: mgr inż. Michal Lankosz dr hab.
TECHNIKA MIKROPROCESOROWA
 LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
LABORATORIUM TECHNIKA MIKROPROCESOROWA Port transmisji szeregowej USART MCS'51 Opracował: Tomasz Miłosławski 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się ze sposobami komunikacji mikrokontrolera
Start Bity Bit Stop 1 Bit 0 1 2 3 4 5 6 7 Par. 1 2. Rys. 1
 Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
Temat: Obsługa portu komunikacji szeregowej RS232 w systemie STRC51. Ćwiczenie 2. (sd) 1.Wprowadzenie do komunikacji szeregowej RS232 Systemy bazujące na procesorach C51 mogą komunikować się za pomocą
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Liczniki i timery laboratorium: 03 autor: mgr inż. Michał Lankosz dr hab. Zbisław
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Liczniki i timery laboratorium: 03 autor: mgr inż. Michał Lankosz dr hab. Zbisław
4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD.
 13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
13 4 Transmisja szeregowa na przykładzie komunikacji dwukierunkowej z komputerem PC, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy,
Systemy wbudowane. Wprowadzenie. Wprowadzenie. Mikrokontroler 8051 Budowa
 Systemy wbudowane Mikrokontroler 8051 Budowa dr inż. Maciej Piechowiak Wprowadzenie rdzeń CPU z jednostką artymetyczno-logiczną (ALU) do obliczeń na liczbach 8-bitowych, uniwersalne dwukierunkowe porty
Systemy wbudowane Mikrokontroler 8051 Budowa dr inż. Maciej Piechowiak Wprowadzenie rdzeń CPU z jednostką artymetyczno-logiczną (ALU) do obliczeń na liczbach 8-bitowych, uniwersalne dwukierunkowe porty
CYKL ROZKAZOWY = 1 lub 2(4) cykle maszynowe
 cykle maszynowe") MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
MIKROKONTROLER RODZINY MCS 5 Cykl rozkazowy mikrokontrolera rodziny MCS 5 Mikroprocesory rodziny MCS 5 zawierają wewnętrzny generator sygnałów zegarowych ustalający czas trwania cyklu zegarowego Częstotliwość
architektura komputerów w 1 1
 8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
8051 Port P2 Port P3 Transm. szeregowa Timery T0, T1 Układ przerwań Rejestr DPTR Licznik rozkazów Pamięć programu Port P0 Port P1 PSW ALU Rejestr B SFR akumulator 8051 STRUKTURA architektura komputerów
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
4 Transmisja szeregowa, obsługa wyświetlacza LCD.
 1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
1 4 Transmisja szeregowa, obsługa wyświetlacza LCD. Zagadnienia do przygotowania: - budowa i działanie interfejsu szeregowego UART, - tryby pracy, - ramka transmisyjna, - przeznaczenie buforów obsługi
ĆWICZENIE 5. TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM
 ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
ĆWICZENIE 5 TEMAT: OBSŁUGA PORTU SZEREGOWEGO W PAKIECIE KEILuVISON WYSYŁANIE PORTEM SZEREGOWYM Wiadomości wstępne: Port szeregowy może pracować w czterech trybach. Tryby różnią się między sobą liczbą bitów
Mikrokontroler Intel 8051. dr inż. Wiesław Madej
 Mikrokontroler Intel 8051 dr inż. Wiesław Madej Mikrokontroler Intel 8051 Wprowadzony na rynek w 1980 roku Następca rodziny 8048 Intel zakooczył produkcję w marcu 2006 Obecnie produkowany przez różne firmy
Mikrokontroler Intel 8051 dr inż. Wiesław Madej Mikrokontroler Intel 8051 Wprowadzony na rynek w 1980 roku Następca rodziny 8048 Intel zakooczył produkcję w marcu 2006 Obecnie produkowany przez różne firmy
Technika mikroprocesorowa I Wykład 4
 Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Technika mikroprocesorowa I Wykład 4 Układ czasowo licznikowy 8253 INTEL [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf] Wyprowadzenia układu [Źródło: https://www.vtubooks.com/free_downloads/8253_54-1.pdf]
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052)
") Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z możliwościami zastosowania mikrokontrolerów
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 9 Częstościomierz oparty na µc 8051(8052) Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z możliwościami zastosowania mikrokontrolerów
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Współpraca z układami peryferyjnymi i urządzeniami zewnętrznymi Testowanie programowe (odpytywanie, przeglądanie) System przerwań Testowanie programowe
Informacje ogólne o układzie 8051.
 Informacje ogólne o układzie 8051. Układ 8051 jest jednoukładowym mikrokontrolerem 8-bitowym. Mikrokontroler jest umieszczony w 40-nóŜkowej obudowie typu DIL. Poszczególne końcówki układu mają następujące
Informacje ogólne o układzie 8051. Układ 8051 jest jednoukładowym mikrokontrolerem 8-bitowym. Mikrokontroler jest umieszczony w 40-nóŜkowej obudowie typu DIL. Poszczególne końcówki układu mają następujące
Zerowanie mikroprocesora
 Zerowanie mikroprocesora Zerowanie (RESET) procesora jest potrzebne dla ustalenia początkowych warunków pracy po włączeniu zasilania: adres początku programu stan systemu przerwań zawartość niektórych
Zerowanie mikroprocesora Zerowanie (RESET) procesora jest potrzebne dla ustalenia początkowych warunków pracy po włączeniu zasilania: adres początku programu stan systemu przerwań zawartość niektórych
Pracownia elektryczno-elektroniczna klasa IV
 Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
Ćwiczenie nr 5 Cel ćwiczenia: Ćwiczenie ma na celu zaznajomienie z metodami odliczania czasu z wykorzystaniem układów czasowo - licznikowych oraz poznanie zasad zgłaszania przerwań i sposobów ich wykorzystywania
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe
 Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Zagadnienia zaliczeniowe z przedmiotu Układy i systemy mikroprocesorowe elektronika i telekomunikacja, stacjonarne zawodowe System mikroprocesorowy 1. Przedstaw schemat blokowy systemu mikroprocesorowego.
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i mikrokontrolery Przerwania laboratorium: 04 autor: mgr inż. Michał Lankosz dr hab. Zbisław Tabor,
ad a) Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna
 Konfiguracja licznika T1 Niech nasz program składa się z dwóch fragmentów kodu: inicjacja licznika T1 pętla główna") Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
Technika Mikroprocesorowa Laboratorium 4 Obsługa liczników i przerwań Cel ćwiczenia: Celem ćwiczenia jest nabycie umiejętności obsługi układów czasowo-licznikowych oraz obsługi przerwań. Nabyte umiejętności
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8
 3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
3.2. Zegar/kalendarz z pamięcią statyczną RAM 256 x 8 Układ PCF 8583 jest pobierającą małą moc, 2048 bitową statyczną pamięcią CMOS RAM o organizacji 256 x 8 bitów. Adresy i dane są przesyłane szeregowo
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Ćwiczenie 2 Transmisja a szeregowa µc 8051(8052) - PC
 - PC") Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 2 Transmisja a szeregowa µc 8051(8052) - PC Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z budową i programowaniem implementacji
Laboratorium Techniki Mikroprocesorowej Informatyka studia dzienne Ćwiczenie 2 Transmisja a szeregowa µc 8051(8052) - PC Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z budową i programowaniem implementacji
MIKROPROCESORY architektura i programowanie
 SYSTEM PRZERWAŃ (dla µ-kontrolerów rodziny 51) pomysł przerwań zewnętrznych i programowych to kolejny, genialny fundament konstrukcji procesorów cyfrowych Naturalnie sekwencyjne wykonywanie programu może
SYSTEM PRZERWAŃ (dla µ-kontrolerów rodziny 51) pomysł przerwań zewnętrznych i programowych to kolejny, genialny fundament konstrukcji procesorów cyfrowych Naturalnie sekwencyjne wykonywanie programu może
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Część I - Sterownik przerwań 8259A i zegar/licznik 8253
 Programowanie na poziome sprzętu opracowanie pytań Część I - Sterownik przerwań 8259A i zegar/licznik 8253 Autor opracowania: Marcin Skiba cines91@gmail.com 1. Jakie są dwie podstawowe metody obsługi urządzeń
Programowanie na poziome sprzętu opracowanie pytań Część I - Sterownik przerwań 8259A i zegar/licznik 8253 Autor opracowania: Marcin Skiba cines91@gmail.com 1. Jakie są dwie podstawowe metody obsługi urządzeń
Wbudowane układy peryferyjne cz. 1 Wykład 7
 Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Układy Cyfrowe projekt. Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma. Opis głównych modułów sprzętowych
 Michał Leśniewski Tomasz Władziński Układy Cyfrowe projekt Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma Opis głównych modułów sprzętowych Realizacja funkcji gamma entity
Michał Leśniewski Tomasz Władziński Układy Cyfrowe projekt Korekcja jasności obrazów w 24-bitowym formacie BMP z użyciem funkcji gamma Opis głównych modułów sprzętowych Realizacja funkcji gamma entity
Mikroprocesor Operacje wejścia / wyjścia
 Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
Definicja Mikroprocesor Operacje wejścia / wyjścia Opracował: Andrzej Nowak Bibliografia: Urządzenia techniki komputerowej, K. Wojtuszkiewicz Operacjami wejścia/wyjścia nazywamy całokształt działań potrzebnych
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Układ transmisji szeregowej AVR
 Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Układ transmisji szeregowej AVR Transmisja szeregowa/równoległa porównanie: w transmisji szeregowej dane wysyłane są bit po bicie, mniej przewodów niż w transmisji równoległej (dwa przewody elektryczne
Architektura komputerów
 Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Architektura komputerów Tydzień 11 Wejście - wyjście Urządzenia zewnętrzne Wyjściowe monitor drukarka Wejściowe klawiatura, mysz dyski, skanery Komunikacyjne karta sieciowa, modem Urządzenie zewnętrzne
Ćwiczenie 6 Komunikacja z komputerem (łącze RS232)
") IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -1- Ćwiczenie 6 Komunikacja z komputerem (łącze RS232) IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -2-1. Cel ćwiczenia Celem ćwiczenia jest
IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -1- Ćwiczenie 6 Komunikacja z komputerem (łącze RS232) IMiO PW, LPTM, Ćwiczenie 6, Komunikacja z komputerem -2-1. Cel ćwiczenia Celem ćwiczenia jest
Praktyka Techniki Mikroprocesorowej. Mikrokontroler ADuC834
 Praktyka Techniki Mikroprocesorowej Elżbieta Ślubowska Mikrokontroler ADuC834 Materiały pomocnicze do II części zajęć laboratoryjnych. Warszawa 2006 1.Spis treści 1. SPIS TREŚCI...2 2. OPIS STANOWISKA....4
Praktyka Techniki Mikroprocesorowej Elżbieta Ślubowska Mikrokontroler ADuC834 Materiały pomocnicze do II części zajęć laboratoryjnych. Warszawa 2006 1.Spis treści 1. SPIS TREŚCI...2 2. OPIS STANOWISKA....4
Techniki mikroprocesorowe i systemy wbudowane
 Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
Intel 8051 układy Techniki mikroprocesorowe i systemy wbudowane Wykład 6 Układy oparte na procesorach rodziny Intel 51 Wojciech Kordecki wojciech.kordecki@pwsz-legnica.eu Państwowa Wyższa Szkoła Zawodowa
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Opis mikrokontrolera AT89C2051
 Opis mikrokontrolera AT89C2051 Cechy mikrokontrolera AT89C2051: kompatybilny z układami rodziny MCS-51, 2kB wewnętrznej pamięci typu Flash-EPROM, zegar: 0Hz do 24MHz, 8-bitowa jednostka centralna, 128B
Opis mikrokontrolera AT89C2051 Cechy mikrokontrolera AT89C2051: kompatybilny z układami rodziny MCS-51, 2kB wewnętrznej pamięci typu Flash-EPROM, zegar: 0Hz do 24MHz, 8-bitowa jednostka centralna, 128B
Ćw. 5. Obsługa portu szeregowego UART w mikrokontrolerach 8051.
 Ćw 5 Obsługa portu szeregowego UART w mikrokontrolerach 8051 Opracowanie: mgr inż Michał Lankosz 1 Wprowadzenie Celem ćwiczenia jest poznanie działania układu transmisji szeregowej UART 2 Niezbędne wiadomości
Ćw 5 Obsługa portu szeregowego UART w mikrokontrolerach 8051 Opracowanie: mgr inż Michał Lankosz 1 Wprowadzenie Celem ćwiczenia jest poznanie działania układu transmisji szeregowej UART 2 Niezbędne wiadomości
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH. Interfejsy klasy RS
 INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
INTERFEJSY SYSTEMÓW ELEKTRONICZNYCH Interfejsy klasy RS Grzegorz Lentka/Marek Niedostatkiewicz Katedra Optoelektroniki i Systemów Elektronicznych ETI PG 2010 RS232 (1) RS232-1962, RS232C - 1969, Electronic
Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1
 Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
Dodatek C 1. Timer 8-bitowy (Timer0) 1.1. Opis układu Uproszczony schemat blokowy zespołu 8-bitowego timera przedstawiono na rys.1 Rys. 1. Schemat blokowy timera Źródłem sygnału taktującego może być zegar
XMEGA. Warsztaty CHIP Rok akademicki 2014/2015
 XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
Uniwersalny asynchroniczny. UART Universal Asynchronous Receier- Transmiter
 UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
UART Universal Asynchronous Receier- Transmiter Cel projektu: Zbudowanie układu transmisji znaków z komputera na wyświetlacz zamontowany na płycie Spartan-3AN, poprzez łacze RS i program TeraTerm. Laboratorium
Organizacja typowego mikroprocesora
 Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Organizacja typowego mikroprocesora 1 Architektura procesora 8086 2 Architektura współczesnego procesora 3 Schemat blokowy procesora AVR Mega o architekturze harwardzkiej Wszystkie mikroprocesory zawierają
Pośredniczy we współpracy pomiędzy procesorem a urządzeniem we/wy. W szczególności do jego zadań należy:
 Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Współpraca mikroprocesora z urządzeniami zewnętrznymi Urządzenia wejścia-wyjścia, urządzenia których zadaniem jest komunikacja komputera z otoczeniem (zwykle bezpośrednio z użytkownikiem). Do najczęściej
Architektura komputera. Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt
 Architektura komputera Architektura von Neumanna: Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt Zawartośd tej pamięci jest adresowana przez wskazanie miejsca, bez względu
Architektura komputera Architektura von Neumanna: Dane i rozkazy przechowywane są w tej samej pamięci umożliwiającej zapis i odczyt Zawartośd tej pamięci jest adresowana przez wskazanie miejsca, bez względu
interfejs szeregowy wyświetlaczy do systemów PLC
 LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
LDN SBCD interfejs szeregowy wyświetlaczy do systemów PLC SEM 08.2003 Str. 1/5 SBCD interfejs szeregowy wyświetlaczy do systemów PLC INSTRUKCJA OBSŁUGI Charakterystyka Interfejs SBCD w wyświetlaczach cyfrowych
Ćwiczenie 30. Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51
 Ćwiczenie 30 Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51 Cel ćwiczenia Poznanie architektury oraz zasad programowania mikrokontrolerów rodziny 51, aby zapewnić
Ćwiczenie 30 Techniki mikroprocesorowe Programowanie w języku Asembler mikrokontrolerów rodziny '51 Cel ćwiczenia Poznanie architektury oraz zasad programowania mikrokontrolerów rodziny 51, aby zapewnić
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd...
 ze światem zewnętrznym cd...") Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd... wzmacniacze, przekaźniki, itp. Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym cd... wzmacniacze, przekaźniki, itp. Ryszard J. Barczyński, 2017 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
Układy sekwencyjne. Podstawowe informacje o układach cyfrowych i przerzutnikach (rodzaje, sposoby wyzwalania).
.") Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Ćw. 10 Układy sekwencyjne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną układy rejestrów
Obszar rejestrów specjalnych. Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW
 Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
Laboratorium Podstaw Techniki Mikroprocesorowej Instytut Mikroelektroniki i Optoelektroniki PW MIKROKONTROLER 85 - wiadomości podstawowe. Schemat blokowy mikrokontrolera 85 Obszar rejestrów specjalnych
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Przerwania, polling, timery - wykład 9
 SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
SWB - Przerwania, polling, timery - wykład 9 asz 1 Przerwania, polling, timery - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Przerwania, polling, timery - wykład 9 asz 2 Metody obsługi zdarzeń
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Architektura komputerów
 Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Architektura komputerów Wykład 12 Jan Kazimirski 1 Magistrale systemowe 2 Magistrale Magistrala medium łączące dwa lub więcej urządzeń Sygnał przesyłany magistralą może być odbierany przez wiele urządzeń
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola
 Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Wstęp: Interfejs portu równoległego 6821 i portu szeregowego 6850 firmy Motorola Struktura systemu 68008 z układami peryferyjnymi 6821, 6050 Na rysunku 1.1 pokazano strukturę stanowiska z interfejsami
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Laboratorium Ćwiczenie 4 Magistrala SPI Program ćwiczenia: konfiguracja transmisji danych między mikrokontrolerem a cyfrowym czujnikiem oraz sterownikiem wyświetlaczy 7-segmentowych przy użyciu magistrali
Programowany układ czasowy APSC
 Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
. Rodzaje transmisji sygnału i RS-232
 . Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
. Rodzaje transmisji sygnału i RS-232 1. Transmisja szeregowa i równoległa Transmisja sygnału może przebiegać w różnoraki sposób. Najbardziej podstawowym z podziałów, jest podział transmisji sygnału na
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
Wbudowane układy peryferyjne cz. 2 Wykład 8
 Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
Wbudowane układy peryferyjne cz. 2 Wykład 8 Timery Timery (liczniki) 2 Timery informacje ogólne Mikrokontroler ATmega32 posiada 3 liczniki: Timer0 8-bitowy Timer1 16-bitowy Timer2 8-bitowy, mogący pracować
ARCHITEKTURA PROCESORA,
 ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
ARCHITEKTURA PROCESORA, poza blokami funkcjonalnymi, to przede wszystkim: a. formaty rozkazów, b. lista rozkazów, c. rejestry dostępne programowo, d. sposoby adresowania pamięci, e. sposoby współpracy
Mikrokontroler 80C51
 DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
DSM-51 * STRONA 1 * Temat : Wiadomości podstawowe Układy cyfrowe to rodzaj układów elektronicznych, w których sygnały napięciowe przyjmują tylko określoną liczbę poziomów, którym przypisywane są wartości
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
PC 3 PC^ TIMER IN RESET PC5 TIMER OUT. c 3. L 5 c.* Cl* 10/H CE RO WR ALE ADO AD1 AD2 AD3 AD4 A05 A06 LTJ CO H 17 AD7 U C-"
 PC 3 PC^ TIMER IN RESET PC5 TIMER OUT 10/H CE RO WR ALE ADO AD1 AD2 AD3 AD4 A05 A06 AD7 U ss c 3 L 5 c.* Cl* S 9 10 11 12 13 U 15 H 17 Cu C-" ln LTJ CO 2.12. Wielofunkcyjne układy współpracujące z mikroprocesorem
PC 3 PC^ TIMER IN RESET PC5 TIMER OUT 10/H CE RO WR ALE ADO AD1 AD2 AD3 AD4 A05 A06 AD7 U ss c 3 L 5 c.* Cl* S 9 10 11 12 13 U 15 H 17 Cu C-" ln LTJ CO 2.12. Wielofunkcyjne układy współpracujące z mikroprocesorem
Cyfrowe układy scalone
 Cyfrowe układy scalone Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Cyfrowe układy scalone Układy cyfrowe
Cyfrowe układy scalone Ryszard J. Barczyński, 2010 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Cyfrowe układy scalone Układy cyfrowe
Interfejsy. w systemach pomiarowych. Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego
 Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
Interfejsy w systemach pomiarowych Ryszard J. Barczyński, 2016 Materiały dydaktyczne do użytku wewnętrznego Interfejsy w systemach pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
1.2. Architektura rdzenia ARM Cortex-M3...16
 Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Od Autora... 10 1. Wprowadzenie... 11 1.1. Wstęp...12 1.1.1. Mikrokontrolery rodziny ARM... 14 1.2. Architektura rdzenia ARM Cortex-M3...16 1.2.1. Najważniejsze cechy architektury Cortex-M3... 16 1.2.2.
Programowany układ czasowy
 Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Programowany układ czasowy Zbuduj na płycie testowej ze Spartanem-3A prosty ośmiobitowy układ czasowy pracujący w trzech trybach. Zademonstruj jego działanie na ekranie oscyloskopu. Projekt z Języków Opisu
Struktura i działanie jednostki centralnej
 Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
Badanie modułów wewnętrznych mikrokontrolera 311[07].Z4.02
![Badanie modułów wewnętrznych mikrokontrolera 311[07].Z4.02](/thumbs/71/66202766.jpg "Badanie modułów wewnętrznych mikrokontrolera 311[07].Z4.02") MINISTERSTWO EDUKACJI NARODOWEJ Danuta Pawełczyk Badanie modułów wewnętrznych mikrokontrolera 311[07].Z4.02 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom
MINISTERSTWO EDUKACJI NARODOWEJ Danuta Pawełczyk Badanie modułów wewnętrznych mikrokontrolera 311[07].Z4.02 Poradnik dla ucznia Wydawca Instytut Technologii Eksploatacji Państwowy Instytut Badawczy Radom
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery System przerwań laboratorium: 11 autorzy: dr hab. Zbisław Tabor, prof. PK mgr inż.
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe
 ze światem zewnętrznym lokalne interfejsy szeregowe") Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe Ryszard J. Barczyński, 2009 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Sprzężenie mikrokontrolera (nie tylko X51) ze światem zewnętrznym lokalne interfejsy szeregowe Ryszard J. Barczyński, 2009 2015 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały
Programowanie mikrokontrolerów. 15 stycznia 2008
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 15 stycznia 2008 RS232 Jeden z najstarszych interfejsów szeregowych Pierwotne przeznaczenie to łączenie terminali znakowych z komputerem, często
Podstawowe elementy układów cyfrowych układy sekwencyjne. Rafał Walkowiak
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak 3.12.2015 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące funkcje
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne
 Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Lista rozkazów mikrokontrolera 8051 część pierwsza: instrukcje przesyłania danych, arytmetyczne i logiczne Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego
Problematyka sieci miejscowej LIN
 Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Problematyka sieci miejscowej LIN Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska 1.08.07 Zygmunt Kubiak 1 Wprowadzenie Przykładowe rozwiązanie sieci LIN Podsumowanie 1.08.07 Zygmunt Kubiak
Interfejsy systemów pomiarowych
 Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
Interfejsy systemów pomiarowych Układ (topologia) systemu pomiarowe może być układem gwiazdy układem magistrali (szyny) układem pętli Ze względu na rodzaj transmisji interfejsy możemy podzielić na równoległe
LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW
 POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
POLITECHNIKA POZNAŃSKA FILIA W PILE LABORATORIUM ELEKTRONIKI I TEORII OBWODÓW numer ćwiczenia: data wykonania ćwiczenia: data oddania sprawozdania: OCENA: 6 21.11.2002 28.11.2002 tytuł ćwiczenia: wykonawcy:
Układy czasowe / liczniki (timers/counters)
") Układy czasowe / liczniki (timers/counters) Współpraca MK z otoczeniem w czasie rzeczywistym wymaga odliczania czasu, zliczania zdarzeń lub generowania złożonych sekwencji binarnych. Funkcje te realizowane
Układy czasowe / liczniki (timers/counters) Współpraca MK z otoczeniem w czasie rzeczywistym wymaga odliczania czasu, zliczania zdarzeń lub generowania złożonych sekwencji binarnych. Funkcje te realizowane