Podstawy Konstrukcji Urządzeń Precyzyjnych
|
|
|
- Henryka Szymczak
- 6 lat temu
- Przeglądów:
Transkrypt
1 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Sprzęgła Mechanizmy ruchu liniowego Opracował: dr inż. Wiesław Mościcki Instytut Mikromechaniki i Fotoniki Zakład Konstrukcji Urządzeń Precyzyjnych
2 1. Przekładnie cierne 2. Przekładnie cięgnowe
3 Przekładnie cierne Warunkiem przeniesienia ruchu w przekładniach ciernych jest docisk współpracujących członów.
4 Przekładnie cierne - mikropoślizg Mikropoślizg przy sztywnym podłożu Mikropoślizg przy sprężystym podłożu
5 Przekładnie cierne przeniesienie ruchu Ruch może być przekazywany: bezpośrednio (a, b, c) pośrednio (d, e), tj. z wykorzystaniem pomocniczych elementów w kształcie walca (krążek, rolka) lub kulki


6 Przekładnie cierne o przełożeniu stałym Przekładnie cierne o stałym przełożeniu
 przełożeniu -")
7 Przekładnie cierne o przełożeniu zmiennym Przekładnie cierne o nastawianym (zmiennym) przełożeniu - wariatory
 przełożeniu -")
8 Przekładnie cierne o przełożeniu zmiennym Przekładnia cierna o nastawianym (zmiennym) przełożeniu - wariator
9 Przekładnie cierne - przełożenie D 1,2 średnice skuteczne koła czynnego i biernego, 1,2 prędkości kątowe koła czynnego i biernego, współczynnik poślizgu (w prawidłowo zaprojektowanych i wykonanych przekładniach w granicach 0,9 0,995 ) Przełożenie przekładni ciernej określa zależność: Współczynnik obrazuje istnienie mikropoślizgu a na powierzchniach stożkowych także poślizgu (dotyczy kół stożkowych i klinowych). W punktach A i B prędkość poślizgu jest największa, v p = v pmax, zaś w punkcie C, leżącym na skutecznych średnicach kół v p = 0. Poślizgi powodują straty na tarcie, grzanie i zużywanie się kół. i = 1 2 = D D 2 1


10 Przekładnie cierne przenoszony moment F t = F n F n F t D 1,2 siła docisku tarcz (kół), siła tarcia na powierzchni styku, średnice kół Ruch obrotowy i moment przenoszone są dzięki istnieniu siły tarcia: obliczeniowy współczynnik tarcia materiałów kół Dla zwiększenia pewności poprawnego działania przekładni wprowadza się współczynnik przyczepności. Wtedy efektywna, a więc możliwa do wykorzystania, siła tarcia jest równa: Przyjmuje się następujące wartości współczynnika przyczepności: w przekładniach nastawczych 3, w przekładniach napędowych = 1,25 1,5 F t F = n
11 Przekładnie cierne przenoszony moment Moment przenoszony przez przekładnię, a więc taki moment obciążający koło napędzane, przy którym na pewno nie nastąpi poślizg, jest równy: Ft D2 Fn D2 M2 = 2 2 Moment na kole napędzającym (czynnym), należy wyznaczyć z zależności: gdzie: - sprawność przekładni ciernej, i - przełożenie przekładni ciernej M2 Fn D2 Fn D1 M1 = = i 2 i 2
12 Przekładnie cierne przenoszony moment Sposoby zwiększenia wartości przenoszonego momentu: - zwiększenie siły docisku F n (ograniczeniem są dopuszczalne naciski powierzchniowe Hertza); - zwiększenie współczynnika tarcia (dobór odpowiedniego materiału); - zwiększenie średnicy rolki D 2 (wzrasta moment bezwładności elementów); - zmniejszenie współczynnika przyczepności (zmniejsza się pewność działania); - zastosowanie kół klinowych M F n 2 D 2

13 Przekładnie cierne przenoszony moment Przy współpracy kół klinowych występują dwie pary powierzchni trących a więc także dwie siły docisku: Fn Fn ' = 2 sin Maksymalny moment przenoszony przez taką przekładnię to: ' = M sin = 2 F n' D2 Fn D = sin Jeśli oznaczymy, gdzie pozorny współczynnik tarcia, to moment maksymalny jaki może być przeniesiony przez przekładnię wyniesie F ' D M = n 2 2
14 Przekładnie cierne - materiały Zalecane cechy materiałów: - duże wartości modułu sprężystości wzdłużnej E, gdyż wtedy dopuszczalne są większe naciski Hertza, - duże wartości obliczeniowego współczynnika tarcia, - małe straty na tarcie wewnętrzne (mała histereza), - dobra odporność na zużycie - mała higroskopijność Wartości obliczeniowych współczynników tarcia oraz dopuszczalnych nacisków na jednostkę długości styku członów przekładni wykonanych z różnych materiałów Materiał Współczynnik tarcia - Dopuszczalny nacisk [N/mm] Żeliwo żeliwo 0,10 0,15 - Stal hartowana stal 0,15 0, hartowana Tekstolit stal lub żeliwo 0,20 0, ) Skóra żeliwo 0,25 0, ) Guma stal 0,35 0, ) Stosowane materiały: - stal stal (hartowana, szlifowana, polerowana), - stal guma (tworzywa sztuczne) - stal kompozyt ) podane wartości dotyczą słabszego materiału
15 Przekładnie cierne - właściwości Zalety przekładni ciernych: - prostota konstrukcji, niski koszt, możliwość realizacji przekładni o nastawianym przełożeniu, - cichobieżność, łatwość uzyskania dużego przełożenia, - brak luzów w przekładni przy ruchu rewersyjnym, - może pełnić rolę sprzęgła przeciążeniowego, - zapewnia izolację dynamiczną członów (skokowa zmiana momentu na jednym kole nie powoduje gwałtownej zmiany przyspieszenia drugiego), Wady przekładni ciernych: - niska sprawność, możliwość niekontrolowanych poślizgów, a więc niestałość przełożenia - niewielka przenoszona moc na jednostkę objętości, - konieczność wytworzenia docisku, duże obciążenie łożysk, - niewielka prędkość
16 Przekładnie cierne o specjalnej konstrukcji W przekładniach ciernych docisk rolek jest zwykle stały (wynika z ciężaru Q lub siły sprężyny S). Moment przenoszony przez przekładnię jest wtedy ograniczony wartością współczynnika tarcia. Można jednak skonstruować przekładnię cierną (schemat powyżej), w której siła docisku P będzie funkcją przenoszonego momentu. Rozważmy równowagę koła czynnego O 1 w chwili poślizgu w punkcie styczności C. Na oś rolki 1 działa siła R, która rozkłada się na dwie składowe: - siłę W, wzdłuż ramienia OO 1, - siłę P, która jest odchylona od normalnej do powierzchni D12 (21.05) styku rolek o kąt tarcia.
17 Przekładnie cierne o specjalnej konstrukcji M1 0, 5 P D1 sin Zaś z warunku równowagi sił, to jest rzutu sił R i P na prostopadłą do kierunku siły W (rzuty sił są sobie równe), mamy: R sin(90 ) = P sin( Z warunku równowagi momentów względem O 1 otrzymamy: ) Siła działająca na oś rolki 1 jest równa: czyli : P = R cos sin( ) R = (Q S) a b Q ciężar ramienia, S siła sprężyny
18 Przekładnie cierne o specjalnej konstrukcji Po przekształceniach moment na kole czynnym M 1 jest równy: Moment M 1 zależy od współczynnika tarcia = tg. M 1 D1 a (Q tg 2b ( tg S) 1) Jeśli kąt pochylenia dźwigni będzie tak mały, że spełniony będzie warunek, to moment maksymalny przekładni nie będzie ograniczony wartością współczynnika tarcia (tg /tg 1 zaś moment M 1 może być dowolnie duży (M 1 ) bez obawy poślizgu). Oznacza to, że zwiększa się także docisk rolek (jeśli M, to także P ). Ograniczeniem siły docisku P jest wartość jednostkowych nacisków Hertza między kołami na powierzchni zetknięcia.
19 Przekładnie cierne o specjalnej konstrukcji Osie O 1 oraz O 2 rolek czynnej i biernej mają stałe położenie zaś rolka pośrednia jest dociskana. Przy kierunku obrotów wskazanym strzałką 1, siły tarcia F t1 oraz F t2 wywołują zwiększenie wzajemnego docisku walców. Jeżeli kąt nie jest większy od podwójnego kąta tarcia współpracujących materiałów ( 2 ) siła docisku rolki pośredniej może być równa 0 (zero). Same siły tarcia F t1 oraz F t2 powodują wciąganie walca pośredniego w przestrzeń między rolkami. Wartość momentu przenoszonego jest wtedy ograniczona wytrzymałością elementów.
20 Przekładnie cierne o specjalnej konstrukcji Przy przeciwnym kierunku obrotów lub gdy rolka bierna staje się czynną, siły tarcia wypychają walec pośredni i bez jego docisku do rolek przekładnia nie przeniesie żadnego momentu. Zmniejszenie kąta powoduje wzrost wartości sił normalnych, co zmniejsza ryzyko wystąpienia poślizgów ale zwiększa obciążenie elementów. W efekcie zwiększą się opory ruchu oraz zużycie elementów a zmniejszy sprawność przekładni. Konstruując przekładnię należy dobrać kąt niewiele mniejszy od 2. Wskazane jest także wprowadzenie pewnej niewielkiej siły F docisku rolki pośredniej, gdyż ułatwia to rozpoczęcie pracy przekładni ( O ) = ( OO ) + ( OO ) + ( OO ) ( OO ) cos O
21 Przekładnie cierne - zastosowania Ze względu na możliwy poślizg, przekładnie cierne nie są stosowane jako przekładnie pomiarowe ani jako przekładnie przenoszące duże obciążenia. Były powszechnie stosowane w napędach gramofonów, magnetofonów i dyktafonów. Stosowane są jako przekładnie nastawcze, szczególnie ręczne precyzery (w mikroskopach, w długościomierzach) a także jako mechanizmy do transportu materiałów taśmowych. Precyzery to przekładnie strojeniowe (nastawcze), które realizują ruch zgrubny (makro) członu wyjściowego przy mniejszym przełożeniu i ruch dokładny (mikro) - do bardzo dokładnych nastaw, przy większym przełożeniu.
22 Przekładnie cierne planetarne Przekładnie cierne precyzery: a) bez rozdzielania, b) z rozdzieleniem - ruchu zgrubnego i dokładnego 1 pokrętło ruchu dokładnego, 2 pokrętło ruchu zgrubnego, 3 człon bierny, 4 kulki, 5 nieruchomy pierścień, 6 element sprężynujący dociskający kulki w koszyczku, 7 sprężyna zwrotna
23 Przekładnie cierne Przekładnia cierna jako przekładnia nastawcza: a) z siłą docisku od tarcz członu biernego, b) z siłą docisku od tarcz członu czynnego
24 Przekładnie cierne Przekładnia cierna nastawcza o ruchu makro i mikro (planetarna) 1 pokrętło ruchu dokładnego, 2 pokrętło ruchu zgrubnego, 3 tuleja nieruchoma, 4 kulki, 5 wałek, 6 tuleja ciernej przekładni planetarnej, 7, 8 koła przekładni ciernej, 9 wałek wyjściowy

25 Przekładnie cierne Dwustopniowa przekładnia cierna do precyzyjnego nastawiania prowadnicy w długościomierzu Abbego. Oznaczenia: 1- pokrętło, 2- tuleja gwintowana, 3- sprężyna górna, 4- tuleja nieruchoma, 5- tuleja suwliwa, 6- sprężyna dolna, 7- trzpień pierwszego stopnia przekładni, 8- koło talerzowe, 9-obudowa, 10- trzpień drugiego stopnia przekładni, 11- prowadnica liniowa


26 Przekładnie cierne Napęd papieru za pomocą przekładni ciernej
27 Przekładnie cierne Mechanizm wałka maszyny do pisania


28 Przekładnie cierne Schemat mechanizmu ciernego do podawania materiałów taśmowych


29 Bezstopniowa przekładnia Nu Vinci N380 Mechanizmy ruchu liniowego

30 Bezstopniowa przekładnia Nu Vinci N380 Mechanizmy ruchu liniowego

31 Bezstopniowa przekładnia Nu Vinci N380 Mechanizmy ruchu liniowego
32 Bezstopniowa przekładnia Nu Vinci N380 Płynną zmianę przełożenia Nu Vinci N380 w zakresie od i = 0,5 do i = 1,9 oraz poprawną pracę przekładni pozwalają zapewnić dwa elementy: - geometryczna konfiguracja napędu Zapewnia ona styk dysku czynnego i biernego z obracającymi się kulkami w dwóch różnych miejscach na powierzchni tych kulek. Położenie tych punktów styczności względem osi obrotu kulek może być zmieniane a iloraz promieni styczności to przełożenie przekładni.
33 Bezstopniowa przekładnia Nu Vinci N380 - smarowanie elastohydrodynamiczne (EHL) Wytworzenie ciśnienia środka smarnego, w celu unoszenia i rozdzielenia trących o siebie ciał stałych, ma miejsce w wyniku ruchu względnego trących powierzchni oraz lepkości środka smarnego. Rozdzielenie powierzchni następuje dopiero po przekroczeniu pewnej prędkości granicznej, gdy ciśnienie hydrodynamiczne zrównoważy występujące siły obciążenia. W obszarze współpracy kulki i dysku cząsteczki smaru gromadzą się i łączą, tworząc ciało stałe, przez które może być przenoszona siła styczna a tym samym także moment obrotowy. Należy zauważyć, że elementy toczące się nie są w kontakcie fizycznym. Wada przekładni: duża masa zespołu oraz wysoka cena
34 Przekładnie cięgnowe
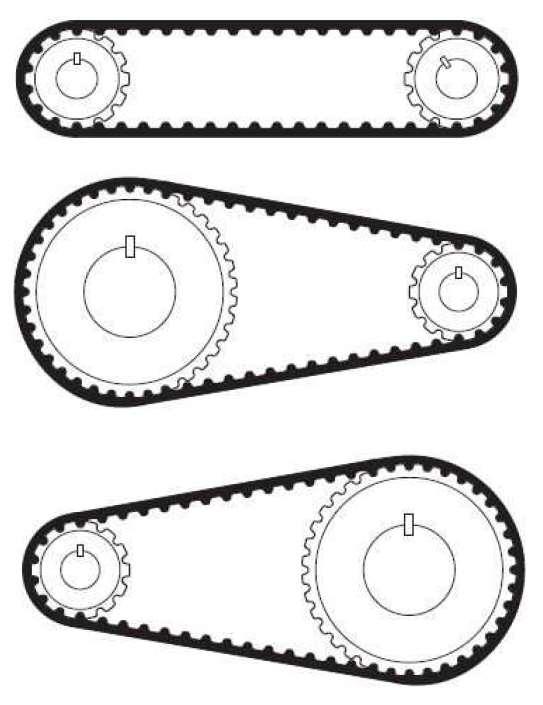
35 Przekładnie cięgnowe Przekładnia cięgnowa składa się z koła czynnego, koła biernego i z cięgna. Ruch i energia są więc przenoszone za pomocą cięgna. Cięgno ma postać paska, linki lub podobnego elementu, np. łańcucha. Cięgno jest dość sztywne w kierunku wzdłużnym (na rozciąganie), natomiast jest wiotkie na zginanie.
36 Przekładnie cięgnowe Ruch jest przenoszony za pomocą cięgna. Przekładnie mogą służyć do zamiany ruchu: a) obrotowego na posuwisty lub odwrotnie, b) obrotowego na obrotowy przy małym kącie, c) posuwistego na posuwisty, d) obrotowego na obrotowy przy dowolnym kącie obrotu, e) dalekie przeniesienie napędu, f) przekładnia przestrzenna
,")
 lub wichrowatych: g)")
37 Przekładnie cięgnowe Przekładnie cięgnowe o osiach: równoległych: a), c), d), e), f), prostopadłych: b) lub wichrowatych: g)
38 Przekładnie cięgnowe Zależnie od sposobu sprzęgnięcia cięgna z członami czynnym i biernym rozróżnia się następujące przekładnie cięgnowe: a) cierne, w których siły z cięgna są przenoszone na człony za pomocą sił tarcia, b) z cięgnem utwierdzonym, c) z cięgnem kształtowym, gdy cięgno jest sprzężone z kształtowymi wieńcami.
39 Przekładnie cięgnowe Cięgno przenosi tylko siły rozciągające, podczas pracy musi być napięte. Realizacja napięcia może być przeprowadzona przez tzw. zamknięcie przekładni. W zamknięciu siłowym cięgno jest napinane przez przyłożenie do obu członów momentów lub sił wzajemnie przeciwnych.
40 Przekładnie cięgnowe Przy zamknięciu kinematycznym cięgno jest napinane przez naprężacze lub od sprężystości własnej cięgna.

41 Przekładnie cięgnowe cierne
42 Przekładnie cięgnowe cierne Przekładnia cięgnowa cierna pracuje dzięki sile tarcia między cięgnem a kołami. Aby wywołać tarcie konieczna jest siła normalna między kołem i cięgnem, czyli siła docisku cięgna do koła. Tę siłę uzyskuje się przez wstępny naciąg cięgna. Przekładnia cięgnowa cierna będzie pracowała poprawnie, gdy: dobrane cięgno nie ulegnie zerwaniu z powodu zbyt dużego momentu obciążenia, wartość momentu obciążenia będzie mniejsza niż momentu tarcia wynikającego ze sprzężenia między cięgnem a członami czynnym i biernym.
43 Przekładnie cięgnowe cierne Załóżmy, że cięgno współpracuje z dwoma kołami bez poślizgu. Wówczas prędkość obwodowa obu kół jest taka sama jak prędkość cięgna v: v = = D 2 D 2 gdzie: 1,2 prędkość kątowa, D 1,2 średnica skuteczna odpowiedniego koła. Przełożenie przekładni cięgnowej jest wtedy równe przełożeniu średniemu: 1 D2 i = = 2 D1 W rzeczywistości występują zmiany długości cięgna z powodu przenoszenia momentu oraz ze względu na charakter współpracy cięgna z kołami. Sprawiają one, że przełożenie chwilowe przekładni nie jest równe przełożeniu średniemu.
44 Przekładnie cięgnowe cierne Przed rozpoczęciem pracy przekładni w cięgnie jest naciąg wstępny S 0. Podczas pracy, po przyłożeniu momentu czynnego M 1, w cięgnach wystąpią siły: - po stronie czynnej cięgna (ciągnącej): S = S M D po stronie biernej cięgna: S 2 = S 0 M D 1 1 Różnica między siłą naciągu S 1 po stronie czynnej oraz S 2 po stronie biernej nazywa się napięciem użytecznym S u i jest równa: S = S S = u 1 2 2M D 1 1
45 Przekładnie cięgnowe cierne Różnica (S 1 S 2 > 0) oznacza, że odkształcenie (wydłużenie) cięgna po stronie czynnej jest większe niż po stronie biernej. Z prawa zachowania masy wynika: masa cięgna przebiegającego w jednostce czasu po każdej stronie musi być taka sama.
46 Przekładnie cięgnowe cierne Oznacza to, że prędkość cięgna v 1 po stronie czynnej jest większa niż prędkość cięgna v 2 po stronie biernej, (v 1 > v 2 ). W przekładni cięgnowej ciernej musi zatem wystąpić poślizg cięgna na całym lub na części kąta opasania każdego z kół. S 1 > S 2 l 1 > l 2 v 1 > v 2
 jest kątem, w zakresie którego nie występuje poślizg a cięgno zachowuje się jak przytwierdzone do koła.")
47 Przekładnie cięgnowe cierne całkowity kąt opasania (geometryczny kąt opasania), z kąt spoczynku (zapasowy kąt opasania), e kąt poślizgu (efektywny kąt opasania), = z + e Kąt spoczynku z (zapasowy kąt opasania) jest kątem, w zakresie którego nie występuje poślizg a cięgno zachowuje się jak przytwierdzone do koła. Kąt poślizgu e (efektywny kąt opasania) kąt w zakresie którego występuje poślizg sprężysty między cięgnem a kołem.
 a przy dalszym wzroście obciążenia wystąpi poślizg trwały.")
48 Przekładnie cięgnowe cierne Jeśli wzrasta moment obciążenia maleje kąt spoczynku z (zapasowy kąt opasania). Kąt ten osiąga wartość zerową przy obciążeniu przekładni maksymalnym momentem. Wtedy na całym kącie opasania występuje sprężysty poślizg cięgna względem koła ( = e, z = 0) a przy dalszym wzroście obciążenia wystąpi poślizg trwały. Jest on szkodliwy, gdyż powoduje grzanie się cięgna. Aby do tego nie dopuścić wymagana jest praca przekładni z pewnym granicznym kątem spoczynku - zg (graniczny kąt zapasowy). Wartość granicznego kąta zg zależy od wymiarów przekładni, własności mechanicznych cięgna i od warunków pracy przekładni.
49 Przekładnie cięgnowe cierne Współczynnik poślizgu (poślizg względny) -, to względna różnica prędkości: v1 v 2 v 2 D2 = = 1 = 1 v v i D 1 1 Przełożenie przekładni cięgnowej ciernej może być zatem opisane przez zależność uwzględniającą poślizg względny: 1 i = 1 2 = D 1 D2 ( 1 ) gdzie: v 1,2 prędkość cięgna po stronie czynnej i biernej W obszarze poślizgu sprężystego poślizg względny jest zwykle równy 0,01 0,03. Wywoła on różnicę między chwilowym a średnim przełożeniem przekładni.
50 Przekładnie cięgnowe cierne Z prawa zachowania masy wynika, że po stronie czynnej i biernej, w jednostce czasu, przesuwa się jednakowa masa cięgna, czyli (q 1 v 1 ) = (q 2 v 2 ) = constans. q 1+ q 0 0 v1 = v q 0,1,2 1,2 masa nieodkształconego i odkształconych cięgien o jednostkowej długości odkształcenie względne Po wyznaczeniu v 2, podstawieniu do wzoru z poprzedniego slajdu, otrzymamy zależność na poślizg względny : 1 2 = W granicach sprężystości (prawo Hooke a) odkształcenie względne jest proporcjonalne do naprężenia, więc ostatecznie: = E = 1 2 u E E moduł sprężystości wzdłużnej materiału pasa, u naprężenie użyteczne pasa
51 Przekładnie cięgnowe cierne Współczynnik napędu - to iloraz napięcia użytecznego S u oraz sumy napięć (S 1 + S 2 ) w cięgnie po stronie czynnej i biernej: = S S S S 2 2 = S 0 + 0,5S u S + u S 0 0,5S u Po uproszczeniach otrzymamy: = Su 2S 0 Wykres poślizgu względnego oraz sprawności w funkcji współczynnika napędu to charakterystyka pracy przekładni cięgnowej ciernej. Wykres = f( ) nazywany jest krzywą poślizgu. S o naciąg wstępny
52 Przekładnie cięgnowe cierne Krzywa poślizgu = u E = Su 2S 0 - poślizg względny, - sprawność przekładni, - współczynnik napędu
53 Przekładnie cięgnowe cierne Z doświadczalnej zależności wynika, że dla współczynnika napędu gr występuje tylko poślizg sprężysty cięgna. Punkt o współrzędnych ( gr, gr ) odpowiada tzw. poślizgowi przeciążeniowemu. Występuje wtedy graniczne obciążenie przekładni przy którym na jednym z kół kąt poślizgu sprężystego objął cały kąt opasania (dla najczęściej stosowanych materiałów cięgien dzieje się tak dla współczynnika napędu = 0,5 0,9). Kąt spoczynku z jest wtedy równy zeru. Sprawność przekładni cięgnowej ciernej jest wówczas największa.
54 Przekładnie cięgnowe cierne Gdy wartość współczynnika napędu jest większa niż gr przemieszczenia cięgna na kołach są trwałe (ciągłe). Przenoszenie napędu odbywa się z dużymi stratami, dlatego jest dopuszczalne tylko przy krótkich przeciążeniach. Maksymalne krótkotrwałe obciążenie przekładni określone jest przez tzw. wskaźnik obciążalności przekładni. Pokazuje on zdolność przekładni do przenoszenia krótkotrwałych przeciążeń. Jest to iloraz max / gr, który np. dla gumowych pasków wynosi 1,15 1,3.
55 Przekładnie cięgnowe cierne Jeżeli napięcie użyteczne S u nie przekracza sił sprzężenia ciernego między cięgnem a kołami, to między tymi elementami zachodzi poślizg wywołany odkształceniami sprężystymi cięgna, czyli tzw. poślizg sprężysty. Jest to stan normalnej pracy przekładni cięgnowej ciernej. Wartość siły S 1 będzie zmieniać się według zależności opisanej wzorem Eulera: S1 S2 e gdzie: e podstawa logarytmu naturalnego, geometryczny (całkowity) kąt opasania, współczynnik tarcia cięgna o koło Z12 (27.04)
56 Przekładnie cięgnowe cierne Wtedy napięcie użyteczne S u będzie równe: S u = S 1 S 2 S 2 [e ( S 1,2 napięcie po stronie czynnej i biernej przekładni = 1] Maksymalny moment M 2max przenoszony przez przekładnię, podczas takiej współpracy, wynosi: zg ) D2 ( D zg ) 2 M2max = Su = S2 [e 1] 2 2 zg graniczny kąt spoczynku (zapasowy), całkowity kąt opasania, współczynnik tarcia cięgna o koło
57 Przekładnie cięgnowe cierne Wartość momentu przenoszonego przez przekładnię cięgnową można zwiększyć przez powiększenie: wymiarów koła D 2 (oznacza to wzrost gabarytów i bezwładności przekładni); napięcia użytecznego S u (wymaga to zwiększenia naciągu wstępnego S 0 co wywoła wzrost naprężeń w cięgnie oraz zwiększy obciążenie łożysk wałków), kąta opasania : może to wymagać zmian konstrukcyjnych w przekładni, wartości współczynnika tarcia zastosowanie klinowej powierzchni roboczej M 2 = S u D 2 2 = S 2 [e ( zg ) D 1] 2 2
58 Przekładnie cięgnowe cierne Prostym sposobem zwiększenia przenoszonego momentu jest zastosowanie klinowej powierzchni roboczej koła oraz cięgna o przekroju kołowym lub trapezowym. W takim przypadku siła normalna F n jest większa niż siła promieniowa F n dociskająca cięgno. F ' n Fn = 2 sin 2 kąt rowka klinowego na powierzchni walcowej koła pasowego

59 Przekładnie cięgnowe cierne Wartość momentu tarcia między kołem a cięgnem wzrośnie. M t = 2F ' n D 2 = 2Fn 2sin D 2 Po uproszczeniach otrzymamy: Obliczeniowy współczynnik tarcia jest równy: M t = 0, 5 F ' = n sin ' D Wartość można zwiększać przez zmniejszanie kąta. Aby uniknąć zakleszczenia cięgna w rowku zaleca się przyjmować kąt 2 = (40 60) 0.
60 Przekładnie cięgnowe cierne Maksymalny moment przenoszony przez przekładnię jest ograniczony naprężeniami występującymi w cięgnie. Podczas pracy w przekładni cięgno cyklicznie rozciąga się i kurczy oraz zgina i prostuje. Odpowiednie naprężenia są równe: - naprężenia rozciągające po stronie czynnej: r = S F 1 S 1 siła w cięgnie czynnym, F przekrój poprzeczny cięgna - naprężenia gnące wywołane zakrzywieniem cięgna na kole: g = E g D E moduł Younga materiału pasa, g grubość pasa, D średnica koła
61 Przekładnie cięgnowe cierne Zalecane właściwości cięgien: duża powierzchnia przekroju poprzecznego, przy jednocześnie małej grubości (oba warunki można spełnić stosując cięgno o dużej szerokości), mała wartość modułu sprężystości wzdłużnej E, duża wartość współczynnika tarcia z materiałem kół Rozciąganie i kurczenie się oraz zginanie cięgna podczas pracy powoduje, że rozpraszanie energii mechanicznej w przekładniach cięgnowych wynika z: a) poślizgu między cięgnem i kołami, b) tarcia wewnętrznego w cięgnie
, z taśmy stalowej (bardzo duża wytrzymałość, możliwa mała grubość, mały współczynnik tarcia ).")
62 Przekładnie cięgnowe cierne Cięgna płaskie wykonuje się z następujących materiałów: ze skóry (duży współczynnik tarcia, drogie), z tkaniny bawełnianej, wełnianej lub z włókien sztucznych, impregnowane lub wulkanizowane z gumą (dość dobra wytrzymałość, duży współczynnik tarcia ), z taśmy stalowej (bardzo duża wytrzymałość, możliwa mała grubość, mały współczynnik tarcia ). Rodzaje pasków klinowych: a) normalny, b) wąskoprofilowy, c) wieloklinowy, d) podwójny (heksagonalny)
, b) klinowe (trapezowe), c)")
63 Przekładnie cięgnowe cierne Profil cięgien: a) płaskie (prostokątne lub kwadratowe), b) klinowe (trapezowe), c) okrągłe
64 Przekładnie cięgnowe cierne Podstawowe właściwości przekładni ze sprzężeniem ciernym: - niska sprawność (szczególnie przy pasku klinowym), - zawsze występuje poślizg (sprężysty lub trwały), - konieczny jest naciąg wstępny cięgna i okresowa jego regulacja, - duże obciążenie łożysk siłami promieniowymi, - zapewnia izolację dynamiczną członów (skokowa zmiana momentu na jednym kole nie powoduje gwałtownej zmiany przyspieszenia drugiego), - może pełnić rolę sprzęgła przeciążeniowego.
65 Obliczanie przekładni z paskiem klinowym (D) Algorytm obliczeń według: W. Stary Poradnik konstruktora, wyd. 5, 2012, Stomil-Sanok
66 Obliczanie przekładni z paskiem klinowym A odległość osi, w mm, D p, d p średnica podziałowa dużego i małego koła, w mm, i przełożenie przekładni, L p długość podziałowa pasa, w mm, n d, n D prędkość obrotowa małego i dużego koła, obr/min, n c, n b prędkość obrotowa czynnego i biernego, obr/min, N moc przenoszona przez przekładnię, w kw, N 1 moc znamionowa dla jednego paska, w kw, v prędkość pasa w m/s, z liczba pasków w przekładni, kąt opasania mniejszego koła, kąt odchylenia pasa od linii środków kół rowkowych, = 90 - /2 x minimalna odległość wymagana do napięcia pasa, w mm, y minimalna odległość wymagana do założenia pasa, w mm
67 Obliczanie przekładni z paskiem klinowym Dane wejściowe służące do wykonania obliczeń dotyczą parametrów układu napędzającego i napędzanego: - rodzaj układu napędzającego i napędzanego, - moc na wałku napędzającym: N, - prędkość obrotowa wałka czynnego: n c - prędkość obrotowa odbiornika n b - dzienny czas pracy, w godzinach T - odległość osi i średnice kół optymalne W przekładni przyjmujemy: n c = n d oraz n b = n D a więc także d c = d p oraz d b = D p
68 Obliczanie przekładni z paskiem klinowym 1. Wyznaczenie współczynnika warunków pracy k T Dla znanych: - rodzaju napędu, - czasu pracy T, - właściwości odbiornika, dobieramy z tabeli (obok) wartość współczynnika k T
69 Obliczanie przekładni z paskiem klinowym 2. Wyznaczenie mocy obliczeniowej N o N o = k T N 3. Dobór przekroju paska oraz średnicy d p mniejszego koła Dla wyznaczonej mocy obliczeniowej N o oraz znanej prędkości obrotowej członu czynnego n c = n d, korzystamy z wykresów w celu dobrania profilu paska oraz optymalnej, tj. z zalecanego przedziału, średnicy koła d p. Przy doborze średnicy koła należy pamiętać, że: - dopuszczalna prędkość liniowa pasa v max = 30 m/s (Z) - zmniejszenie średnicy, przy ustalonych pozostałych parametrach, powoduje wzrost siły obwodowej a więc większe obciążenie łożysk.
70 Obliczanie przekładni z paskiem klinowym 3. Dobór przekroju paska i średnicy d p (cd)
71 Obliczanie przekładni z paskiem klinowym 4. Wyznaczenie prędkości liniowej pasa: v = n d d p przy czym v max 30 m/s, zaś d p w mm 5. Wyznaczenie przełożenia przekładni (zalecanego): i = n n 6. Wyznaczenie średnicy dużego koła: c b D = i p d p
72 Obliczanie przekładni z paskiem klinowym 7. Obliczenie wstępnej odległości osi A o : A A A max min o = = = 2 (D 0, 7 (D 0, 5 (A p + p max d + + p d ) p A ) min 8. Obliczenie długości pasa L p dla odległości A o : ) L ' p 2A o + 157, (D p + d p ) + (D p d 4A o p ) 2 Ostateczną długość pasa L p przyjąć z odpowiedniej tabeli katalogu.
73 Obliczanie przekładni z paskiem klinowym 9. Obliczenie odległości osi A dla dobranego pasa o długości L p : A p + p 2 q gdzie: p = 0, 25 L 0, 393 (D d ) q = p p + 0, 125 (D d ) p p 10. Obliczenie długości x i y przestawienia osi: x , L p p p y 0, 015 L 11. Wyznaczenie współczynnika warunków pracy k T : Wartość współczynnika została dobrana w punkcie 1 dla założonego czasu pracy, charakterystyki napędu i odbiornika oraz warunków pracy urządzenia.
74 Obliczanie przekładni z paskiem klinowym 12. Wyznaczenie współczynnika kąta opasania k : Wartość mocy N 1 (przenoszonej przez jeden pas) określono dla kąta opasania = 180 o. Współczynnik k koryguje wartość N 1 jeśli kąt opasania jest mniejszy niż 180 o. Dla D p A d p z odpowiedniej tabeli odczytujemy wartość współczynnika k oraz kąta opasania. Przykład: (D p -d p )/A = (150-50)/270 = 0,37 k = 0,95

75 Obliczanie przekładni z paskiem klinowym 13. Wyznaczenie współczynnika długości pasa k L : Współczynnik k L uwzględnia częstotliwość zmian zginania zastosowanego pasa. Zależy on od długości podziałowej pasa oraz od jego przekroju.

76 Obliczanie przekładni z paskiem klinowym 14. Wyznaczenie mocy znamionowej przenoszonej przez jeden pas Dla pasa o znanym profilu, średnicy d p mniejszego koła oraz jego prędkości obrotowej n d odczytujemy z tablicy moc N 1.
77 Obliczanie przekładni z paskiem klinowym 15. Wyznaczenie liczby z pasków w przekładni z N k T N k k 1 L Obliczoną liczbę pasków z zaokrąglamy w górę do najbliższej liczby całkowitej. 16. Wyznaczenie parametrów kontroli naciągu pasa: a) Siła statyczna T s występująca w cięgnie pasa T s = 500 ( 2, 02 k k z v ) N k T + c v 2 c stała do obliczania siły odśrodkowej, według tabeli.
78 Obliczanie przekładni z paskiem klinowym b) Minimalna siła statyczna N s w linii środków kół: N s = 2 T z sin s 2 c) Obliczyć wartość ugięcia U p dla istniejącej długości odcinka pomiarowego pasa U p U L = 100 U z tabeli na następnej stronie, zaś L = A sin odległość L należy obliczyć ze wzoru: 2

79 Obliczanie przekładni z paskiem klinowym Wartość ugięcia U na 100 mm długości odcinka pomiarowego pasa
80 Obliczanie przekładni z paskiem klinowym d) Siła kontrolna q do sprawdzenia poprawności naciągu pasa Naciąg pasów należy okresowo sprawdzać i regulować, a zwłaszcza w pierwszych godzinach pracy przekładni. Wtedy bowiem pas wydłuża się najwięcej. Nieprawidłowy naciąg lub brak jego korekty jest najczęstszą przyczyną zbyt szybkiego zużycia pasa.
81 Przekładnie cięgnowe z cięgnem utwierdzonym D13 (28.05) Z12 cd (27.04)
82 Przekładnie cięgnowe z cięgnem utwierdzonym Cięgno jest przytwierdzone odpowiednio w punktach A i D, zaś na kątach opasania 1 oraz 2 sprzężone ciernie z kołami. Moment jest więc przenoszony zarówno przez sprzężenie cierne jak i dzięki utwierdzeniu cięgna. Przekładnie z cięgnem utwierdzonym: pracują przy niewielkich kątach obrotu (mniejszych niż ), przenoszą niewielkie momenty, zapewniają wierne i powtarzalne przenoszenie ruchu.

83 Przekładnie cięgnowe z cięgnem utwierdzonym Utwierdzenie taśmy stalowej na kole Utwierdzenie taśmy bawełnianej na bębnie napędu wózka maszyny do pisania



84 Przekładnie cięgnowe z cięgnem utwierdzonym Bęben napędowy zegara ściennego obciążnikowego Utwierdzenie końca struny Utwierdzenie końca linki
85 Przekładnie cięgnowe z cięgnem utwierdzonym M 1,2 momenty na kołach czynnym (1) i biernym (2), 1,2 chwilowe kąty opasania, S 1,2 S naciąg cięgna, wywołujący siły S 1 i S 2 w miejscach zamocowania cięgna, siła reakcji w miejscach zamocowania cięgna na kole czynnym (1) oraz na kole biernym (2) Siły S 1,2 nie są równe sile S i zmieniają się według zależności: S = S e S 2 = S e gdzie: 1, 2 współczynniki tarcia cięgna o koło 1 i 2
86 Przekładnie cięgnowe z cięgnem utwierdzonym Sprężyste wydłużenie cięgna Całkowite wydłużenie cięgna l c jest sumą wydłużeń: - l cięgna o długości l oraz - l 1 i l 2 cięgna na kątach opasania 1 i 2 l c = l + l 1 + l 2 Sumaryczne wydłużenie nie jest stałe, gdyż zmieniają się kąty opasania 1 i 2 oraz rozkład sił wzdłuż cięgna.
87 Przekładnie cięgnowe z cięgnem utwierdzonym Sprężyste wydłużenie cięgna Aby zmniejszyć sprężyste wydłużenia cięgna należy: stosować cięgna o dużej sztywności na rozciąganie, czyli o dużym przekroju poprzecznym, wykonane z materiału o dużym module sprężystości E, zachować możliwie stałą wartość momentu obciążenia, obciążoną przekładnię przewinąć w obie strony do położenia, w którym w każdym zamocowaniu cięgna wystąpi siła S (w całym cięgnie będzie wtedy siła S). Całkowite wydłużenie cięgna nie będzie wtedy zależało od kątów opasania kół.
88 Przekładnie cięgnowe z cięgnem utwierdzonym Wybrzuszenie cięgna Podczas nawijania na koło cięgno jest zginane. Cięgno o pewnej sztywności obciążone siłą S+ S spowoduje dopełniający ruch suwaka o l lub obrót koła o (a) albo kół o kąty odpowiednio 1,2 (b). Zmniejszenie wybrzuszenia cięgna w przekładni, a więc i l czy, można osiągnąć przez zmniejszenie momentu bezwładności przekroju poprzecznego cięgna. Oznacza to, że cięgno powinno mieć jak najmniejszą grubość.
89 Przekładnie cięgnowe z cięgnem utwierdzonym Cechy konstrukcyjne przekładni: należą do najdokładniejszych przekładni mechanicznych, w celu ograniczenia sprężystych wydłużeń cięgna należy zachować dużą wartość modułu E sprężystości wzdłużnej (Younga), w dokładnych przekładniach stosuje się metalowe cięgna w postaci szerokich i cienkich taśm (zmniejszenie wybrzuszenia), zmniejszenie błędu położenia można uzyskać przez: - zmniejszenie wahań momentu a więc i wahań siły napinającej, - powiększenie wartości siły napinającej S w stosunku do zakresu jej zmian S, - zmniejszenie momentu bezwładności przekroju poprzecznego cięgna
90 Przekładnie cięgnowe z cięgnem utwierdzonym Cechy konstrukcyjne przekładni: w przekładniach stosowanych w urządzeniach precyzyjnych napięcie wstępne S 0 wynosi N, w przekładni można uzyskać błąd kątowego położenia mniejszy niż 1, a nawet obniżyć go do około 10, wadą przekładni jest duże obciążenie łożysk powodowane napięciem wstępnym. Przekładnia z cięgnem utwierdzonym do strojenia kondensatora obrotowego 1 koło, 2 sprężyna napinająca cięgno, 3 rolka prowadząca cięgno, 4 wskaźnik, 5 pokrętło (wałek) strojenia


91 Siłownik pneumatyczny beztłoczyskowy cięgnowy 1 tłok, 2 tuleja, 3 cięgno, 4 koła prowadzące, 5 uszczelnienia, 6 elementy naciągu, 7 - suwak
92 Przekładnie z paskiem zębatym
93 Przekładnie z paskiem zębatym Przekładnie cięgnowe cierne nie zapewniają jednoznacznego położenia członu biernego względem czynnego, z powodu możliwości wystąpienia poślizgu. Zjawisko takie nie występuje przy kształtowym sprzężeniu cięgna z kołami. Jest to realizowane przez zastosowanie pasków kształtowych. Największe zastosowanie mają paski zębate.


94 Budowa przekładni z paskiem zębatym Koło napędzające Napinacz Pas zębaty Koło zębate napędzane


95 Budowa koła pasowego Wieniec zębaty Żebro Piasta

96 Budowa koła pasowego Koło zębate bez obrzeży Koło zębate z obrzeżami Przy niewielkich rozstawieniach osi wystarcza gdy mniejsze koło ma boczne tarcze.

97 Budowa paska zębatego Poprzeczne włókna elastomeru Warstwa pokrywająca Linki wzmocnienia Mieszanina elastycznego kauczuku Tkaninowa warstwa otaczająca

98 Budowa paska zębatego Pasek zębaty: a) gumowy, b) i c) z tworzywa sztucznego 1 gumowana tkanina, 2 drut lub żyłka wzmacniająca


99 Przykłady różnych typów pasków zębatych



100 Przekładnie z paskiem zębatym Materiały stosowane na koła: dural, stal lub tworzywa sztuczne. Koła z polietylenu, wykonane wtryskowo Silnik skokowy

101 Przekładnie z paskiem zębatym


102 Przekładnie z paskiem zębatym


103 Przekładnie z paskiem zębatym

104 Kryterium stosowalności przekładni cięgnowych
105 Przekładnie z paskiem zębatym Kryterium wytrzymałości Podczas pracy wierzch paska jest rozciągany a zęby ścinane. Zazwyczaj wytrzymałość zębów paska na ścinanie jest tak dobrana, że: jeśli z kołem współpracuje sześć lub więcej zębów paska, to podczas przeciążenia przekładni nastąpi zerwanie paska a nie ścięcie zębów.

106 Przekładnie z paskiem zębatym Podziałka paska t jest mierzona wzdłuż osi cięgna wzmacniającego, gdyż w tej części pasek ulega bardzo małym odkształceniom. Oznacza to, że wymiar podziałki t jest niezależny od wymiarów koła zębatego z którym współpracuje pasek.
107 Przekładnie z paskiem zębatym Oś cięgien wzmacniających paska założonego na koło układa się w łuk okręgu, który można traktować jak okrąg podziałowy koła zębatego. Jego średnica D, zwana jest średnicą skuteczną i jest większa niż średnica zewnętrzna, tj. średnica okręgu wierzchołkowego, koła zębatego.
108 Przekładnie z paskiem zębatym
109 Przekładnie z paskiem zębatym Oznaczenie paska Wymiary metrycznych pasków zębatych Szerokość zębów Podziałka t [mm] Kąt zębów [ 0 ] Wysokość zębów h [mm] f [mm] T 2,5 2,5 40 0,7 1,0 T ,2 1,8 T ,5 3,5 T ,0 6,5
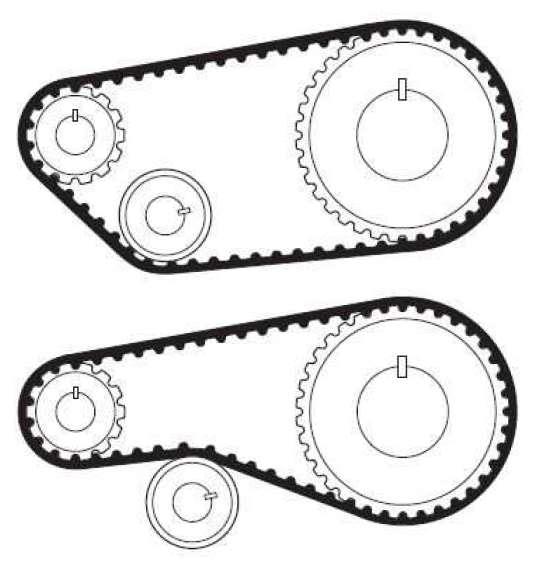
110 Przekładnie z paskiem zębatym Naprężacze (napinacze) Naciąg wstępny paska może być równy zero (praca bez naciągu wstępnego) lub może być większy od zera, S 0 0. Przekładnie zwykle pracują bez naprężaczy, a nadmiar długości paska likwiduje się przez regulowanie odległości osi. Jeśli nie jest to możliwe należy zastosować naprężacz. Naprężaczami mogą być gładkie rolki umieszczone po zewnętrznej stronie paska lub rolki uzębione umieszczone po wewnętrznej stronie paska.
111 Przekładnie z paskiem zębatym Naprężacze (napinacze) Średnicę naprężacza należy dobierać zgodnie z sugestiami producenta pasków, najczęściej według następujących zasad: - o około 30% większą od średnicy d 1 mniejszego z kół, gdy jest to rolka zewnętrzna (w celu ograniczenia niekorzystnego wpływu przeginania paska na jego trwałość), - nie mniejszą niż d 1, gdy jest to rolka wewnętrzna. Naprężacz wewnętrzny ma dodatkowo tę zaletę, że jest jednocześnie eliminatorem drgań paska.


112 Budowa napinacza Rolka Ułożyskowanie rolki Nieruchoma oś napinacza
113 Przekładnie z paskiem zębatym Zalety przekładni z paskiem zębatym: - duży zakres przenoszonych mocy (do 450 kw), - duże maksymalne prędkości ruchu (do 80 m/s), - cicha i płynna praca oraz duża sprawność, - prosty montaż i łatwa obsługa, - zwartość konstrukcji (w przypadku jednostopniowej przekładni), - możliwość pracy bez naprężaczy, - szeroka oferta handlowa pasków oraz elementów dodatkowych jak: koła zębate i rolki napinaczy.
114 Przekładnie z paskiem zębatym Informacje o przekładniach z paskiem zębatym można znaleźć m. in. na stronach: Katalog firmy Mulco : Katalog firmy Good Year : Katalog firmy Power Industrial Engineering Supplied, Australia Pty Ltd. : Katalog firmy PIC Design:


115 Przekładnie z paskiem lub łańcuchem kształtowym
116 Przekładnie z paskiem lub łańcuchem kształtowym Paski (łańcuchy) kształtowe, inne niż zębate, są znacznie mniej rozpowszechnione. Ze względu na kształt zębów paska lub ogniw łańcucha jest konieczne stosowanie kół zębatych oferowanych przez producentów. Parametry techniczne pasków mają wpływ na budowę i zakres zastosowań przekładni. Cechy przekładni z paskami kształtowymi: - stosowane jako przekładnie kinematyczne o niewielkich wymaganiach, - przenoszą niewielkie moce, - pracują przy niewielkich prędkościach, do około 7,5 m/s. - często stosowane przy napędzie ręcznym.
117 Obliczanie przekładni z paskiem zębatym
118 Obliczanie przekładni z paskiem zębatym Dane wejściowe służące do wykonania obliczeń dotyczą parametrów przenoszonych po stronie czynnej przekładni: - moc na wałku napędzającym: N 1, - moment obrotowy czynny: M 1, - prędkość obrotowa wałka czynnego: n 1 - przełożenie przekładni i - rodzaj pasa, - przybliżony rozstaw osi (a min ; a max ) wynikający z rozmieszczenia przekładni oraz warunków pracy
 gdzie N 1 obl = N 1 k h to moc")
119 Obliczanie przekładni z paskiem zębatym 1. Przyjąć podziałkę paska t [mm], uwzględniając moc na wałku koła czynnego i prędkość obrotową tego koła - t dobiera się z tablic t = f(n1obl,n1) gdzie N 1 obl = N 1 k h to moc obliczeniowa [kw] k h - współczynnik przeciążenia, zależny od warunków pracy, dobowej liczby godzin pracy oraz od charakterystyki silnika napędowego


120 Dobór podziałki paska zębatego

121 Obliczanie przekładni z paskiem zębatym 2. Obliczyć moduł paska zębatego ze wzoru: m = t Obliczoną wartość modułu zaokrągla się do wartości znormalizowanej. Znormalizowane wartości modułów: 1,0; 1,5; 2,0; 3,0; 4,0; 5,0; 7,0; 10.0; 3. Dobrać minimalną liczbę zębów koła czynnego z 1 Minimalna liczba zębów koła z 1 = 10
122 Obliczanie przekładni z paskiem zębatym 4. Obliczyć liczbę zębów koła biernego z 2 wiedząc, że dane jest przełożenie i przekładni: z' = i z 2 1 Obliczoną wartość zaokrąglić do liczby całkowitej z 2 oraz wyznaczyć rzeczywiste przełożenie przekładni: 5. Obliczyć średnice podziałowe (skuteczne) kół pasowych D 1, D 2 [mm]: D i = rz 1, 2 = z z 2 1 z 1, 2 t
123 Obliczanie przekładni z paskiem zębatym 6. Obliczyć średnice zewnętrzne kół zębatych: d,2 = D1, 2 1 2e e - położenie osi cięgna

124 Obliczanie przekładni z paskiem zębatym 7. Obliczyć długość pasa wyrażoną przez całkowitą liczbę zębów z p : z p = 2a t gdzie: a z zalecana odległość osi kół w mm, a z a min f 1 współczynnik obliczony ze wzoru: z + 0,5 (z 1 + z 2 ) + f1 t a f 1 z (z2 z1) = 2 4 2
125 Obliczanie przekładni z paskiem zębatym 8. Obliczyć minimalną odległość osi a min : a = 0,55 (D + D ) + min 1 2 h s gdzie h s - wysokość przekroju pasa, 9. Odległość osi a dla dobranej liczby zębów z p : a = [2z p (z 2 z 1 )] t f 2 gdzie f 2 - dobieramy z tablic w zależności od wartości wyrażenia: z z p 2 z z 1 1

126 Obliczanie przekładni z paskiem zębatym
127 Obliczanie przekładni z paskiem zębatym 10. Wyznaczyć długość paska dla dobranej (założonej) odległości osi: l = 2a + 2 ( D + D ) 1 ( D D ) 2a a założone rozstawienie osi kół, D 1,2 średnica podziałowa (skuteczna) koła czynnego i biernego 11. Wyznaczyć kąt opasania koła czynnego (mniejszego) : 2 c = D 2 D a cmin gdzie: a cmin wartość katalogowa podawana przez producenta
128 Obliczanie przekładni z paskiem zębatym 12. Obliczyć liczbę zębów na kącie opasania c : c z1 = z1 360 Wyznaczona liczba zębów powinna mieścić się w przedziale: z 1 = (3...15) 13. Obliczyć prędkość liniową v paska w m/s : D1 n1 v = Prędkość pasa v nie może przekraczać prędkości dopuszczalnej określonej w katalogu producenta v v dop gdzie: v dop = 50 m/s maksymalna prędkość pasa (według katalogu producenta)
129 Obliczanie przekładni z paskiem zębatym 14. Wyznaczyć siłę obwodową F t w N: F t = 2 10 D 3 1 M 1 gdzie: M 1 - moment na kole czynnym wyrażony w Nm, D 1 - średnica podziałowa (skuteczna) koła czynnego w mm 15. Siła obciążająca wały przekładni F w N: F = (1,1 1,2) F t

130 Obliczanie przekładni z paskiem zębatym 16. Szerokość obliczeniowa pasa b obl wyrażona w mm: b pobl = N N z t 1obl 1 gdzie: N t - moc przenoszona przez pojedynczy ząb pasa o szerokości 1 mm w typowych warunkach pracy (wg tabelki), w kw/mm z 1 - liczba zębów pasa na kącie opasania (pkt. 12)
131 Przekładnie o ruchu przerywanym Najczęściej spotykaną przekładnią o ruchu przerywanym jest mechanizm krzyża maltańskiego (ok. 1888r). Zapewnia on ruch przerywany wałka napędzanego przy ciągłym ruchu obrotowym wałka napędzającego. Sworzeń członu czynnego wchodzi kolejno w zazębienia krzyża powodując jego okresowy obrót o pewien kąt. Koło czynne posiada także możliwość blokowania członu biernego pomiędzy kolejnymi obrotami. Istnieje bardzo wiele odmian tych mechanizmów, różniących się m.in. kształtem i liczbą zazębień, np. mechanizm maltański z zazębieniem wewnętrznym, który ma bardziej zwartą budowę, większą wytrzymałość mechaniczną a jego osie obracają się w tym samym kierunku. Mechanizmy ruchu liniowego



")
132 Przekładnie o ruchu przerywanym a) b) Mechanizm krzyża maltańskiego z czterema zazębieniami: a) zewnętrznymi, b) wewnętrznymi Mechanizmy ruchu liniowego
133 Przekładnie o ruchu przerywanym Mechanizm maltański znalazł szerokie zastosowanie najpierw w zegarach mechanicznych, potem w projektorach i kamerach filmowych, obrabiarkach i innych urządzeniach automatycznych. Ze względu na rozwój elektroniki, obecnie jest rzadko stosowany. 2 = 2 z asin 2 2 r = acos 2 2 R = 1 = 2 = z z 2 z 3, gdzie z liczba wycięć Mechanizmy ruchu liniowego
134 Zwiększenie liczby skoków krzyża maltańskiego przy jednym obrocie tarczy napędzającej można uzyskać przez zwiększenie liczby palców. Musi być jednak zachowany warunek, aby każdy następny palec wchodził w wycięcie po wyjściu z wycięcia palca poprzedniego. Oznacza to, że musi być spełniony warunek: n 1 2 gdzie n liczba palców Po podstawieniu wzoru na 1 mamy liczbę palców mechanizmu: n Przekładnie o ruchu przerywanym 2z z 2 Przykład: jeśli liczba wycięć z = 3 to n = 1 5, dla z = 4 przyjmuje się n = 1 3 Mechanizm krzyża maltańskiego można tak skonstruować, aby uzyskać przy jednym obrocie tarczy napędzającej różne czasy pozostawania krzyża w spoczynku. Mechanizmy ruchu liniowego
135 Mechanizm o różnym czasie spoczynku Mechanizmy ruchu liniowego
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE ŁAŃCUCHOWE. a) o przełożeniu stałym. b) o przełożeniu zmiennym
 o przełożeniu stałym. b) o przełożeniu zmiennym") PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
PRZEKŁADNIE CIERNE PRZEKŁADNIE MECHANICZNE ZĘBATE CIĘGNOWE CIERNE PASOWE LINOWE ŁAŃCUCHOWE a) o przełożeniu stałym a) z pasem płaskim a) łańcych pierścieniowy b) o przełożeniu zmiennym b) z pasem okrągłym
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Podstawy Konstrukcji Maszyn PRZEKŁADNIE PASOWE 1 Przekładnie pasowe Przekładnie pasowe służą do przenoszenia mocy za pośrednictwem cięgien w postaci pasów. Przekładnia pasowa cierna składa się z dwóch
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Przekładnie mechaniczne 2 Sprzęgła
Studia Inżynierskie Dzienne (I stopnia) Wydział Mechatroniki Politechniki Warszawskiej Podstawy Konstrukcji Urządzeń Precyzyjnych Wykład sem. 4 Przekładnie mechaniczne 1 Przekładnie mechaniczne 2 Sprzęgła
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy
 Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
Wykład nr. 14 Inne wybrane rodzaje transmisji mocy Przekładnie łańcuchowe 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch
OBLICZANIE KÓŁK ZĘBATYCH
 OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
OBLICZANIE KÓŁK ZĘBATYCH koło podziałowe linia przyporu P R P N P O koło podziałowe Najsilniejsze zginanie zęba następuje wówczas, gdy siła P N jest przyłożona u wierzchołka zęba. Siłę P N można rozłożyć
Przekładnie cierne. Rozdział
 6 1 Rozdział Przekładnie cierne Przekładnią cierną nazywa się taką, w której siła jest przekazywana między elementami ruchowymi dzięki sile tarcia, bez elementu pośredniego (jak np. pasek w przekładni
6 1 Rozdział Przekładnie cierne Przekładnią cierną nazywa się taką, w której siła jest przekazywana między elementami ruchowymi dzięki sile tarcia, bez elementu pośredniego (jak np. pasek w przekładni
Instytut Konstrukcji Maszyn, Instytut Pojazdów Szynowych 1
 1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
1. SPRZĘGŁO TULEJOWE. Sprawdzić nośność sprzęgła z uwagi na naciski powierzchniowe w rowkach wpustowych. Przyjąć, że p dop = 60 Pa. Zaproponować sposób zabezpieczenia tulei przed przesuwaniem się wzdłuż
Koła stożkowe o zębach skośnych i krzywoliniowych oraz odpowiadające im zastępcze koła walcowe wytrzymałościowo równoważne
 Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
Spis treści PRZEDMOWA... 9 1. OGÓLNA CHARAKTERYSTYKA I KLASYFIKACJA PRZEKŁADNI ZĘBATYCH... 11 2. ZASTOSOWANIE I WYMAGANIA STAWIANE PRZEKŁADNIOM ZĘBATYM... 22 3. GEOMETRIA I KINEMATYKA PRZEKŁADNI WALCOWYCH
1. Zasady konstruowania elementów maszyn
 3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
3 Przedmowa... 10 O Autorów... 11 1. Zasady konstruowania elementów maszyn 1.1 Ogólne zasady projektowania.... 14 Pytania i polecenia... 15 1.2 Klasyfikacja i normalizacja elementów maszyn... 16 1.2.1.
Spis treści. Przedmowa 11
 Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Przykłady obliczeń z podstaw konstrukcji maszyn. [Tom] 2, Łożyska, sprzęgła i hamulce, przekładnie mechaniczne / pod redakcją Eugeniusza Mazanka ; autorzy: Andrzej Dziurski, Ludwik Kania, Andrzej Kasprzycki,
Badanie przekładni cięgnowej z pasami klinowymi
 POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
POLITECHNIKA BIAŁOTOCKA WYDZIAŁ MECHANICZNY Katedra Budowy i Eksploatacji Maszyn Instrukcja do zajęć laboratoryjnych z przedmiotu: PODTAWY KONTRUKCJI MAZYN II Temat ćwiczenia: Badanie przekładni cięgnowej
Przekładnie cięgnowe. Rozdział. Główne właściwości przekładni cięgnowych
 5 1 Rozdział Przekładnie cięgnowe W przekładniach cięgnowych ruch i energia przenoszona jest za pomocą cięgna, które ma postać paska, linki lub podobnego elementu, np. łańcucha. Cięgno jest dość sztywne
5 1 Rozdział Przekładnie cięgnowe W przekładniach cięgnowych ruch i energia przenoszona jest za pomocą cięgna, które ma postać paska, linki lub podobnego elementu, np. łańcucha. Cięgno jest dość sztywne
3. Wstępny dobór parametrów przekładni stałej
 4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
4,55 n1= 3500 obr/min n= 1750 obr/min N= 4,55 kw 0,70 1,00 16 37 1,41 1,4 8 30,7 1,41 1. Obliczenie momentu Moment na kole n1 obliczam z zależności: 9550 9550 Moment na kole n obliczam z zależności: 9550
PL B1. ŻBIKOWSKI JERZY, Zielona Góra, PL BUP 03/06. JERZY ŻBIKOWSKI, Zielona Góra, PL WUP 09/11 RZECZPOSPOLITA POLSKA
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 209441 (13) B1 (21) Numer zgłoszenia: 369279 (51) Int.Cl. F16H 7/06 (2006.01) F16G 13/06 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Politechnika Poznańska Wydział Inżynierii Zarządzania. Wprowadzenie do techniki tarcie ćwiczenia
 Politechnika Poznańska Wydział Inżynierii Zarządzania Wprowadzenie do techniki tarcie ćwiczenia Model Charlesa Coulomb a (1785) Charles Coulomb (1736 1806) pierwszy pełny matematyczny opis, (tzw. elastyczne
Politechnika Poznańska Wydział Inżynierii Zarządzania Wprowadzenie do techniki tarcie ćwiczenia Model Charlesa Coulomb a (1785) Charles Coulomb (1736 1806) pierwszy pełny matematyczny opis, (tzw. elastyczne
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 174162 (13) B1 (21) Numer zgłoszenia: 303848 (51) IntCl6: F16H 1/14 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 14.06.1994 (54)
2011-05-17. Przekładnie łańcuchowe
 Przekładnie łańcuchowe 1 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch składa się z szeregu ogniw połączonych przegubowo.
Przekładnie łańcuchowe 1 1. Pojęcia podstawowe Przekładnia łańcuchowa składa się z dwóch lub więcej kół uzębionych, opasanych cięgnem - łańcuchem. Łańcuch składa się z szeregu ogniw połączonych przegubowo.
ności od kinematyki zazębie
 Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Klasyfikacja przekładni zębatych z w zależno ności od kinematyki zazębie bień PRZEKŁADNIE ZĘBATE CZOŁOWE ŚRUBOWE WALCOWE (równoległe) STOŻKOWE (kątowe) HIPERBOIDALNE ŚLIMAKOWE o zebach prostych o zębach
Koła pasowe mogą być mocowane bezpośrednio na wałach silników lub maszyn, lub z zastosowaniem specjalnych podpór
 PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
PRZEKŁADNIA PASOWA Model fenomologiczny przekładni pasowej Rys.1. Własności przekładni pasowych Podstawowymi zaletami przekładni pasowej są: - łagodzenie gwałtownych zmian obciążenia i tłumienie drgań
Przekładnie zębate. Klasyfikacja przekładni zębatych. 1. Ze względu na miejsce zazębienia. 2. Ze względu na ruchomość osi
 Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Przekładnie zębate Klasyfikacja przekładni zębatych 1. Ze względu na miejsce zazębienia O zazębieniu zewnętrznym O zazębieniu wewnętrznym 2. Ze względu na ruchomość osi O osiach stałych Planetarne przynajmniej
Zespół Szkół Nr 1 im. Jana Kilińskiego w Pabianicach Przedmiot: Proces projektowania części maszyn
 Zespół Szkół Nr im. Jana Kilińskiego w Pabianicach Projektowanie sprzęgieł Obliczanie sprzęgieł polega na wyznaczeniu przenoszonego momentu obrotowego (równego momentowi skręcającemu) i obliczeniu wymiarów.
Zespół Szkół Nr im. Jana Kilińskiego w Pabianicach Projektowanie sprzęgieł Obliczanie sprzęgieł polega na wyznaczeniu przenoszonego momentu obrotowego (równego momentowi skręcającemu) i obliczeniu wymiarów.
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 03/08. BOGDAN BRANOWSKI, Poznań, PL JAROSŁAW FEDORCZUK, Poznań, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 211706 (13) B1 (21) Numer zgłoszenia: 380288 (51) Int.Cl. B62M 11/14 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 21.07.2006
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie
 obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie") Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
Podstawowe przypadki (stany) obciążenia elementów : 1. Rozciąganie lub ściskanie 2. Zginanie 3. Skręcanie 4. Ścinanie Rozciąganie lub ściskanie Zginanie Skręcanie Ścinanie 1. Pręt rozciągany lub ściskany
Podstawy Konstrukcji Maszyn
 0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
0-05-7 Podstawy Konstrukcji Maszyn Część Wykład nr.3. Przesunięcie zarysu przypomnienie znanych zagadnień (wykład nr. ) Zabieg przesunięcia zarysu polega na przybliżeniu lub oddaleniu narzędzia od osi
PRZEKŁADNIE ŁAŃCUCHOWE
 PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
PRZEKŁADNIE ŁAŃCUCHOWE Przekładnie łańcuchowe znajdują zastosowanie ( szczególnie przy dużych odległościach osi ) do przenoszenia mocy, jako środki napędu w różnego rodzaju maszynach i urządzeniach przemysłowych
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn Opracowanie
OSIE ELEKTRYCZNE SERII SHAK GANTRY
 OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
OSIE ELEKTRYCZNE SERII SHAK GANTRY 1 OSIE ELEKTRYCZNE SERII SHAK GANTRY Osie elektryczne serii SHAK GANTRY stanowią zespół zmontowanych osi elektrycznych SHAK zapewniający obsługę dwóch osi: X oraz Y.
SPRZĘGŁA MIMOŚRODOWE INKOMA TYP KWK Inkocross
 - 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
- 2 - Spis treści 1.1 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje ogólne... - 3-1.2 Sprzęgło mimośrodowe INKOMA Inkocross typ KWK - Informacje techniczne... - 4-1.3 Sprzęgło mimośrodowe
W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego
 służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego") SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
SPRZĘGŁA W budowie maszyn poprzez sprzęgło rozumie się urządzenie (mechanizm) służące do łączenia ze sobą dwóch wałów celem przeniesienia momentu skręcającego bez zmiany jego wartości i kierunku. W ogólnym
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE
 1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
1. STRUKTURA MECHANIZMÓW 1.1. POJĘCIA PODSTAWOWE 1.1.1. Człon mechanizmu Człon mechanizmu to element konstrukcyjny o dowolnym kształcie, ruchomy bądź nieruchomy, zwany wtedy podstawą, niepodzielny w aspekcie
Wprowadzenie do WK1 Stan naprężenia
 Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
Wytrzymałość materiałów i konstrukcji 1 Wykład 1 Wprowadzenie do WK1 Stan naprężenia Płaski stan naprężenia Dr inż. Piotr Marek Wytrzymałość Konstrukcji (Wytrzymałość materiałów, Mechanika konstrukcji)
Podstawy Konstrukcji Urządzeń Precyzyjnych
 Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
Podstawy Konstrukcji Urządzeń Precyzyjnych Materiały pomocnicze do ćwiczeń projektowych. Zespół napędu liniowego - 1 Algorytm obliczeń wstępnych Preskrypt: Opracował dr inż. Wiesław Mościcki Warszawa 2018
Hamulce elektromagnetyczne. EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie
 Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Hamulce elektromagnetyczne EMA ELFA Fabryka Aparatury Elektrycznej Sp. z o.o. w Ostrzeszowie Elektromagnetyczne hamulce i sprzęgła proszkowe Sposób oznaczania zamówienia P Wielkość mechaniczna Odmiana
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15
 Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Pytania przygotowujące do egzaminu z Wytrzymałości Materiałów sem. I studia niestacjonarne, rok ak. 2014/15 1. Warunkiem koniecznym i wystarczającym równowagi układu sił zbieżnych jest, aby a) wszystkie
Podstawy Konstrukcji Maszyn. Wykład nr. 13 Przekładnie zębate
 Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Podstawy Konstrukcji Maszyn Wykład nr. 13 Przekładnie zębate 1. Podział PZ ze względu na kształt bryły na której wykonano zęby A. walcowe B. stożkowe i inne 2. Podział PZ ze względu na kształt linii zębów
Struktura manipulatorów
 Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
Temat: Struktura manipulatorów Warianty struktury manipulatorów otrzymamy tworząc łańcuch kinematyczny o kolejnych osiach par kinematycznych usytuowanych pod kątem prostym. W ten sposób w zależności od
I. Wstępne obliczenia
 I. Wstępne obliczenia Dla złącza gwintowego narażonego na rozciąganie ze skręcaniem: 0,65 0,85 Przyjmuję 0,70 4 0,7 0,7 0,7 A- pole powierzchni przekroju poprzecznego rdzenia śruby 1,9 2,9 Q=6,3kN 13,546
I. Wstępne obliczenia Dla złącza gwintowego narażonego na rozciąganie ze skręcaniem: 0,65 0,85 Przyjmuję 0,70 4 0,7 0,7 0,7 A- pole powierzchni przekroju poprzecznego rdzenia śruby 1,9 2,9 Q=6,3kN 13,546
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Przenośnik zgrzebłowy - obliczenia
 Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Przenośnik zgrzebłowy - obliczenia Katedra Maszyn Górniczych, Przeróbczych i Transportowych Przenośnik zgrzebłowy - obliczenia Dr inż. Piotr Kulinowski pk@imir.agh.edu.pl tel. (67) 0 7 B- parter p.6 konsultacje:
Podstawy Konstrukcji Maszyn
 Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
Podstawy Konstrukcji Maszyn Część Wykład nr. 1 1. Podstawowe prawo zazębienia I1 przełożenie kinematyczne 1 i 1 = = ω ω r r w w1 1 . Rozkład prędkości w zazębieniu 3 4 3. Zarys cykloidalny i ewolwentowy
(13) B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 F16H 3/62
 B1 (12) OPIS PATENTOWY (19) PL (11) PL B1 F16H 3/62") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176935 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309072 (22) Data zgłoszenia: 09.06.1995 (51) IntCl6: F16H 3/62 (54)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 176935 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 309072 (22) Data zgłoszenia: 09.06.1995 (51) IntCl6: F16H 3/62 (54)
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop Spis treści
 Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Przekładnie ślimakowe / Henryk Grzegorz Sabiniak. Warszawa, cop. 2016 Spis treści Przedmowa XI 1. Podział przekładni ślimakowych 1 I. MODELOWANIE I OBLICZANIE ROZKŁADU OBCIĄŻENIA W ZAZĘBIENIACH ŚLIMAKOWYCH
Wyznaczanie modułu Younga metodą strzałki ugięcia
 Ćwiczenie M12 Wyznaczanie modułu Younga metodą strzałki ugięcia M12.1. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie wartości modułu Younga różnych materiałów poprzez badanie strzałki ugięcia wykonanych
Ćwiczenie M12 Wyznaczanie modułu Younga metodą strzałki ugięcia M12.1. Cel ćwiczenia Celem ćwiczenia jest wyznaczenie wartości modułu Younga różnych materiałów poprzez badanie strzałki ugięcia wykonanych
Moment obrotowy i moc silnika a jego obciążenie (3)
") Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Moment obrotowy i moc silnika a jego obciążenie (3) data aktualizacji: 2014.07.15 Aby silnik napędzał samochód, uzyskiwana dzięki niemu siła napędowa na kołach napędowych musi równoważyć siłę oporu, która
Tarcie poślizgowe
 3.3.1. Tarcie poślizgowe Przy omawianiu więzów w p. 3.2.1 reakcję wynikającą z oddziaływania ciała na ciało B (rys. 3.4) rozłożyliśmy na składową normalną i składową styczną T, którą nazwaliśmy siłą tarcia.
3.3.1. Tarcie poślizgowe Przy omawianiu więzów w p. 3.2.1 reakcję wynikającą z oddziaływania ciała na ciało B (rys. 3.4) rozłożyliśmy na składową normalną i składową styczną T, którą nazwaliśmy siłą tarcia.
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 Zespół Szkół Samochodowych w Bydgoszczy Wykład Linia ciągła skrzynka z biegiem
SMAROWANIE PRZEKŁADNI
 SMAROWANIE PRZEKŁADNI Dla zmniejszenia strat energii i oporów ruchu, ale również i zmniejszenia intensywności zużycia ściernego powierzchni trących, zabezpieczenia od zatarcia, korozji oraz lepszego odprowadzania
SMAROWANIE PRZEKŁADNI Dla zmniejszenia strat energii i oporów ruchu, ale również i zmniejszenia intensywności zużycia ściernego powierzchni trących, zabezpieczenia od zatarcia, korozji oraz lepszego odprowadzania
Rodzaje obciążeń, odkształceń i naprężeń
 Rodzaje obciążeń, odkształceń i naprężeń 1. Podział obciążeń i odkształceń Oddziaływania na konstrukcję, w zależności od sposobu działania sił, mogą być statyczne lun dynamiczne. Obciążenia statyczne występują
Rodzaje obciążeń, odkształceń i naprężeń 1. Podział obciążeń i odkształceń Oddziaływania na konstrukcję, w zależności od sposobu działania sił, mogą być statyczne lun dynamiczne. Obciążenia statyczne występują
PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O)
") PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O) ZADANIE PROJEKTOWE: Zaprojektować chwytak do manipulatora przemysłowego wg zadanego schematu kinematycznego spełniający następujące wymagania: a) w
PROJEKT TECHNICZNY MECHANIZMU CHWYTAKA TYPU P-(O-O-O) ZADANIE PROJEKTOWE: Zaprojektować chwytak do manipulatora przemysłowego wg zadanego schematu kinematycznego spełniający następujące wymagania: a) w
LABORATORIUM PKM. Katedra Konstrukcji i Eksploatacji Maszyn. Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych
 LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
LABORATORIUM PKM Badanie statycznego i kinetycznego współczynnika tarcia dla wybranych skojarzeń ciernych Katedra Konstrukcji i Eksploatacji Maszyn Katedra Konstrukcji i Eksploatacji Maszyn BUDOWA STANOWISKA
OSIE ELEKTRYCZNE SERII SVAK
 OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
OSIE ELEKTRYCZNE SERII SVAK 1 OSIE ELEKTRYCZNE SERII SVAK Jednostka liniowa serii SVAK to napęd paskowy ze stałym wózkiem i ruchomym profilem. Uzupełnia ona gamę osi elektrycznych Metal Work ułatwiając
Badanie wpływu obciążenia na sprawność przekładni falowej
 Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Zakład Podstaw Konstrukcji i Eksploatacji Maszyn Instytut Podstaw Budowy Maszyn Wydział Samochodów i Maszyn Roboczych Politechnika Warszawska dr inż. Benedykt Ponder dr inż. Szymon Dowkontt Laboratorium
Projektowanie Systemów Elektromechanicznych. Wykład 3 Przekładnie
 Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
Projektowanie Systemów Elektromechanicznych Wykła 3 Przekłanie Zębate: Proste; Złożone; Ślimakowe; Planetarne. Cięgnowe: Pasowe; Łańcuchowe; Linowe. Przekłanie Przekłanie Hyrauliczne: Hyrostatyczne; Hyrokinetyczne
Maszyny transportowe rok IV GiG
 Ćwiczenia rok akademicki 2010/2011 Strona 1 1. Wykaz ważniejszych symboli i oznaczeo B szerokośd taśmy, [mm] C współczynnik uwzględniający skupione opory ruchu przenośnika przy nominalnym obciążeniu, D
Ćwiczenia rok akademicki 2010/2011 Strona 1 1. Wykaz ważniejszych symboli i oznaczeo B szerokośd taśmy, [mm] C współczynnik uwzględniający skupione opory ruchu przenośnika przy nominalnym obciążeniu, D
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
PL B1. LISICKI JANUSZ ZAKŁAD PRODUKCYJNO HANDLOWO USŁUGOWY EXPORT IMPORT, Pukinin, PL BUP 17/16. JANUSZ LISICKI, Pukinin, PL
 PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226242 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226242 (13) B1 (21) Numer zgłoszenia: 411231 (51) Int.Cl. A01D 46/26 (2006.01) A01D 46/00 (2006.01) Urząd Patentowy Rzeczypospolitej
Sterowanie Napędów Maszyn i Robotów
 Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Wykład 2 - Dobór napędów Instytut Automatyki i Robotyki Warszawa, 2017 Wstępny dobór napędu: dane o maszynie Podstawowe etapy projektowania Krok 1: Informacje o kinematyce maszyny Krok 2: Wymagania dotyczące
Dobór silnika serwonapędu. (silnik krokowy)
") Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
Dobór silnika serwonapędu (silnik krokowy) Dane wejściowe napędu: Masa całkowita stolika i przedmiotu obrabianego: m = 40 kg Współczynnik tarcia prowadnic = 0.05 Współczynnik sprawności przekładni śrubowo
SZKOŁA POLICEALNA dla dorosłych
 SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
SZKOŁA POLICEALNA dla dorosłych www. samochodowka.edu.pl Kierunek kształcenia w zawodzie: Przedmiot: dr inż. Janusz Walkowiak SKRZYNIE BIEGÓW PLAN WYKŁADU 1. Zadanie skrzyni biegów w pojazdach samochodowych
Sterowanie napędów maszyn i robotów
 Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Sterowanie napędów maszyn i robotów dr inż. akub ożaryn Wykład. Instytut Automatyki i obotyki Wydział echatroniki Politechnika Warszawska, 014 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego
Politechnika Białostocka INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
Politechnika Białostocka Wydział Budownictwa i Inżynierii Środowiska INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH Temat ćwiczenia: Próba skręcania pręta o przekroju okrągłym Numer ćwiczenia: 4 Laboratorium z
INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH
 INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
INSTYTUT MASZYN I URZĄDZEŃ ENERGETYCZNYCH Politechnika Śląska w Gliwicach INSTRUKCJA DO ĆWICZEŃ LABORATORYJNYCH BADANIE TWORZYW SZTUCZNYCH OZNACZENIE WŁASNOŚCI MECHANICZNYCH PRZY STATYCZNYM ROZCIĄGANIU
Badania pasowego układu cięgnowego dźwigu
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Maszyn Roboczych Ciężkich Laboratorium Dźwigów Ćwiczenie W6 Badania pasowego układu cięgnowego dźwigu Wersja robocza Tylko do użytku
STATYCZNA PRÓBA ROZCIĄGANIA
 STATYCZNA PRÓBA ROZCIĄGANIA Próba statyczna rozciągania jest jedną z podstawowych prób stosowanych do określenia jakości materiałów konstrukcyjnych wg kryterium naprężeniowego w warunkach obciążeń statycznych.
STATYCZNA PRÓBA ROZCIĄGANIA Próba statyczna rozciągania jest jedną z podstawowych prób stosowanych do określenia jakości materiałów konstrukcyjnych wg kryterium naprężeniowego w warunkach obciążeń statycznych.
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204
 WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
WYMAGANIA EDUKACYJNE Z PRZEDMIOTU: KONSTRUKCJE BUDOWLANE klasa III Podstawa opracowania: PROGRAM NAUCZANIA DLA ZAWODU TECHNIK BUDOWNICTWA 311204 1 DZIAŁ PROGRAMOWY V. PODSTAWY STATYKI I WYTRZYMAŁOŚCI MATERIAŁÓW
SERIA AT. Precyzyjne Przekładnie Kątowe
 SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
SERIA AT Precyzyjne Przekładnie Kątowe Seria AT Charakterystyka Obudowa wykonana z jednego kawałka stali nierdzewnej zapewnia wysoką sztywność i odporność na korozję. Wielokrotna precyzyjna obróbka powierzchni
PL B1. HIKISZ BARTOSZ, Łódź, PL BUP 05/07. BARTOSZ HIKISZ, Łódź, PL WUP 01/16. rzecz. pat.
 PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 220905 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 220905 (13) B1 (21) Numer zgłoszenia: 376878 (51) Int.Cl. F16H 7/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Karta danych materiałowych. DIN EN ISO 527-3/5/100* minimalna wartość DIN obciążenie 10 N, powierzchnia dolna Współczynik tarcia (stal)
") Materiał: Zamknięty komórkowy poliuretan Kolor: Fioletowy Sylodyn typoszereg Standardowe wymiary dostawy Grubość:, mm, oznaczenie: Sylodyn NF mm, oznaczenie: Sylodyn NF Rolka:, m szer. m długość Pasy:
Materiał: Zamknięty komórkowy poliuretan Kolor: Fioletowy Sylodyn typoszereg Standardowe wymiary dostawy Grubość:, mm, oznaczenie: Sylodyn NF mm, oznaczenie: Sylodyn NF Rolka:, m szer. m długość Pasy:
(13) B1 F16H 1/16 F16H 57/12
 B1 F16H 1/16 F16H 57/12") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 164105 (13) B1 (21) Numer zgłoszenia: 288497 Urząd Patentowy (22) Data zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
Karta danych materiałowych. DIN EN ISO 527-3/5/100* minimalna wartość DIN obciążenie 10 N, powierzchnia dolna Współczynik tarcia (stal)
") Materiał: Zamknięty komórkowy poliuretan Kolor: Nieieski Sylodyn typoszereg Standardowe wymiary dostawy Grubość:, mm, oznaczenie: Sylodyn NE mm, oznaczenie: Sylodyn NE Rolka:, m. szer. m długość Pasy:
Materiał: Zamknięty komórkowy poliuretan Kolor: Nieieski Sylodyn typoszereg Standardowe wymiary dostawy Grubość:, mm, oznaczenie: Sylodyn NE mm, oznaczenie: Sylodyn NE Rolka:, m. szer. m długość Pasy:
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
Załącznik nr 1 do zapytania ofertowego nr 12/2018 na dostawę i montaż fabrycznie nowej czopiarki do ram okien dachowych OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest dostawa i fabrycznie nowej
15. Przedmiot: WYTRZYMAŁOŚĆ MATERIAŁÓW Kierunek: Mechatronika Specjalność: Elektroautomatyka okrętowa Rozkład zajęć w czasie studiów Liczba godzin
 15. Przedmiot: WYTRZYMAŁOŚĆ MATERIAŁÓW Kierunek: Mechatronika Specjalność: Elektroautomatyka okrętowa Rozkład zajęć w czasie studiów Liczba godzin Liczba godzin Liczba tygodni w tygodniu w semestrze w
15. Przedmiot: WYTRZYMAŁOŚĆ MATERIAŁÓW Kierunek: Mechatronika Specjalność: Elektroautomatyka okrętowa Rozkład zajęć w czasie studiów Liczba godzin Liczba godzin Liczba tygodni w tygodniu w semestrze w
PL B1. PRZEDSIĘBIORSTWO CONCEPT STAL B&S LEJMAN SPÓŁKA JAWNA, Chełm, PL BUP 26/15. STANISŁAW LEJMAN, Chełm, PL
 PL 223981 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223981 (13) B1 (21) Numer zgłoszenia: 408597 (51) Int.Cl. F16H 7/02 (2006.01) F16H 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 223981 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223981 (13) B1 (21) Numer zgłoszenia: 408597 (51) Int.Cl. F16H 7/02 (2006.01) F16H 7/08 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
(12) OPIS PATENTOWY (19) PL (11) (13) B1
 OPIS PATENTOWY (19) PL (11) (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178576 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 310479 (22) Data zgłoszenia: 13.09.1995 (51) IntCl6: F16H 7/04 F16H
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 178576 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 310479 (22) Data zgłoszenia: 13.09.1995 (51) IntCl6: F16H 7/04 F16H
Dobór sprzęgieł hydrokinetycznych 179 Bibliografia 183
 Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
Podstawy konstrukcji maszyn. T. 3 / autorzy: Tadeusz Kacperski, Andrzej Krukowski, Sylwester Markusik, Włodzimierz Ozimowski ; pod redakcją Marka Dietricha. wyd. 3, 3 dodr. Warszawa, 2015 Spis treści 1.
PL 210777 B1. UNIWERSYTET PRZYRODNICZY W LUBLINIE, Lublin, PL 21.01.2008 BUP 02/08 29.02.2012 WUP 02/12. ZBIGNIEW OSZCZAK, Lublin, PL
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210777 (13) B1 (21) Numer zgłoszenia: 380160 (51) Int.Cl. F16D 13/75 (2006.01) F16C 1/22 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 210777 (13) B1 (21) Numer zgłoszenia: 380160 (51) Int.Cl. F16D 13/75 (2006.01) F16C 1/22 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
Wewnętrzny stan bryły
 Stany graniczne Wewnętrzny stan bryły Bryła (konstrukcja) jest w równowadze, jeżeli oddziaływania zewnętrzne i reakcje się równoważą. P α q P P Jednak drugim warunkiem równowagi jest przeniesienie przez
Stany graniczne Wewnętrzny stan bryły Bryła (konstrukcja) jest w równowadze, jeżeli oddziaływania zewnętrzne i reakcje się równoważą. P α q P P Jednak drugim warunkiem równowagi jest przeniesienie przez
Wytrzymałość Materiałów
 Wytrzymałość Materiałów Skręcanie prętów o przekrojach kołowych Siły przekrojowe, deformacja, naprężenia, warunki bezpieczeństwa i sztywności, sprężyny śrubowe. Wydział Inżynierii Mechanicznej i Robotyki
Wytrzymałość Materiałów Skręcanie prętów o przekrojach kołowych Siły przekrojowe, deformacja, naprężenia, warunki bezpieczeństwa i sztywności, sprężyny śrubowe. Wydział Inżynierii Mechanicznej i Robotyki
ĆWICZENIE NR.6. Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych
 ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
ĆWICZENIE NR.6 Temat : Wyznaczanie drgań mechanicznych przekładni zębatych podczas badań odbiorczych 1. Wstęp W nowoczesnych przekładniach zębatych dąży się do uzyskania małych gabarytów w stosunku do
PL B1. POLITECHNIKA POZNAŃSKA, Poznań, PL BUP 14/14. BARTOSZ WIECZOREK, Poznań, PL MAREK ZABŁOCKI, Poznań, PL
 PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL 223142 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 223142 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 402275 (22) Data zgłoszenia: 28.12.2012 (51) Int.Cl.
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 11/16
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 228639 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 410211 (22) Data zgłoszenia: 21.11.2014 (51) Int.Cl. F16H 57/12 (2006.01)
Wyznaczenie równowagi w mechanizmie. Przykład 6
 Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
Wyznaczenie równowagi w mechanizmie Przykład 6 3 m, J Dane: m, J masa, masowy moment bezwładności prędkość kątowa członu M =? Oraz siły reakcji 0 M =? M b F ma b a M J b F b M b Para sił F b M b F b h
NAPĘDY MASZYN TECHNOLOGICZNYCH
 WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
WYDZIAŁ BUDOWY MASZYN I ZARZĄDZANIA Instytut Technologii Mechanicznej ul. Piotrowo 3, 60-965 Poznań, tel. +48 61 665 2203, fax +48 61 665 2200 e-mail: office_mt@put.poznan.pl, www.put.poznan.pl MATERIAŁY
Interaktywna rama pomocnicza. Opis PGRT
 Opis Opis to konstrukcja, której mocowanie sprawia, że dołączone do niej ramy współpracują niczym pojedyncza rama podwozia, a nie dwie osobne ramy. wykazuje znacznie większą odporność na ugięcie niż nieinteraktywna
Opis Opis to konstrukcja, której mocowanie sprawia, że dołączone do niej ramy współpracują niczym pojedyncza rama podwozia, a nie dwie osobne ramy. wykazuje znacznie większą odporność na ugięcie niż nieinteraktywna
Podstawy skrzyni biegów
 Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
Układ napędowy - podzespoły Podstawy skrzyni biegów opracowanie mgr inż. Ireneusz Kulczyk aktualizacja 02.2011 07.2011 2015 12.2017 Zespół Szkół Samochodowych w Bydgoszczy Sprawdziany Wykład Linia ciągła
MECHANIKA 2. Drgania punktu materialnego. Wykład Nr 8. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Dla nowoczesnych zespołów napędowych TOOLFLEX. Sprzęgło mieszkowe TOOLFLEX RADEX-NC ROTEX GS
 przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
przęgło mieszkowe ROTEX G TOOLFLEX RADEX-NC 119 przęgło mieszkowe przęgło sprawdziło się już wielokrotnie (sprzęgło mieszkowe). Najbardziej istotnymi cechami są: dobra kompensacja odchyłek (osiowej, promieniowej
2. Pręt skręcany o przekroju kołowym
 2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
2. Pręt skręcany o przekroju kołowym Przebieg wykładu : 1. Sformułowanie zagadnienia 2. Warunki równowagi kąt skręcenia 3. Warunek geometryczny kąt odkształcenia postaciowego 4. Związek fizyczny Prawo
(73) Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL
 Uprawniony z patentu: (43) Zgłoszenie ogłoszono: Wyższa Szkoła Inżynierska, Koszalin, PL") RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
RZECZPOSPOLITA POLSKA (12)OPIS PATENTOWY (19)PL (11)164102 (13) B1 (21) N um er zgłoszenia: 288495 Urząd Patentowy (22) D ata zgłoszenia: 20.12.1990 Rzeczypospolitej Polskiej (51) IntCl5: F16H 1/16 F16H
Defi f nicja n aprę r żeń
 Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
STATYCZNA PRÓBA ROZCIĄGANIA
 Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: STATYCZNA PRÓBA ROZCIĄGANIA oprac. dr inż. Jarosław Filipiak Cel ćwiczenia 1. Zapoznanie się ze sposobem przeprowadzania statycznej
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: STATYCZNA PRÓBA ROZCIĄGANIA oprac. dr inż. Jarosław Filipiak Cel ćwiczenia 1. Zapoznanie się ze sposobem przeprowadzania statycznej
Projekt wału pośredniego reduktora
 Projekt wału pośredniego reduktora Schemat kinematyczny Silnik elektryczny Maszyna robocza P Grudziński v10d MT1 1 z 4 n 3 wyjście z 1 wejście C y n 1 C 1 O z 3 n M koło czynne O 1 z z 1 koło bierne P
Projekt wału pośredniego reduktora Schemat kinematyczny Silnik elektryczny Maszyna robocza P Grudziński v10d MT1 1 z 4 n 3 wyjście z 1 wejście C y n 1 C 1 O z 3 n M koło czynne O 1 z z 1 koło bierne P
WYZNACZANIE MODUŁU YOUNGA METODĄ STRZAŁKI UGIĘCIA
 Ćwiczenie 58 WYZNACZANIE MODUŁU YOUNGA METODĄ STRZAŁKI UGIĘCIA 58.1. Wiadomości ogólne Pod działaniem sił zewnętrznych ciała stałe ulegają odkształceniom, czyli zmieniają kształt. Zmianę odległości między
Ćwiczenie 58 WYZNACZANIE MODUŁU YOUNGA METODĄ STRZAŁKI UGIĘCIA 58.1. Wiadomości ogólne Pod działaniem sił zewnętrznych ciała stałe ulegają odkształceniom, czyli zmieniają kształt. Zmianę odległości między
Siłownik liniowy z serwonapędem
 Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
Siłownik liniowy z serwonapędem Zastosowanie: przemysłowe systemy automatyki oraz wszelkie aplikacje wymagające bardzo dużych prędkości przy jednoczesnym zastosowaniu dokładnego pozycjonowania. www.linearmech.it
STATYCZNA PRÓBA SKRĘCANIA
 Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
Mechanika i wytrzymałość materiałów - instrukcja do ćwiczenia laboratoryjnego: Wprowadzenie STATYCZNA PRÓBA SKRĘCANIA Opracowała: mgr inż. Magdalena Bartkowiak-Jowsa Skręcanie pręta występuje w przypadku
PL B1. POLITECHNIKA RZESZOWSKA IM. IGNACEGO ŁUKASIEWICZA, Rzeszów, PL BUP 21/15
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 227819 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 407801 (22) Data zgłoszenia: 04.04.2014 (51) Int.Cl. F16H 1/16 (2006.01)