SPB. dr Wojciech Palubicki
|
|
|
- Kornelia Maria Lewandowska
- 5 lat temu
- Przeglądów:
Transkrypt
1 SPB dr Wojciech Palubicki
2 Przekaz informacji: L-System A(0) A(1) A(2) A(x) A(x+1) Kroki symulacji
3 Przekaz informacji: L-System A(0) A(1) A(2) A(x) A(x+1) Kroki symulacji B(z) < A(x) > B(y) A(x+z+y)
4 Symulacja przestrzeni 1D
5 Symulacja przestrzeni 1D Sąsiedztwo
6 Kontekst Przekaz informacji: L-System <B(0) >B(0) A(0) A(1) A(2) A(x) A(x+1) Kroki symulacji B(z) < A(x) > B(y) A(x+z+y)
7 1D Przestrzeń Przekaz informacji: L-System <B(0) >B(0) A(0) A(1) A(2) Czas

8 1D Przestrzeń L-System i komputer L-System Komputer Czas
9 L-System i komputer L-System Komputer równoległy Czas
10 Turtle graphics + system współrzędnych 3D

11 Turtle graphics + system współrzędnych 3D 1D + 3D Turtle graphics

12 Jak ująć wyższe wymiary przestrzeni w modelu?

13 Komórkowy Automat
14 Dyskretyzacja siatką 2D
15 Pojedyncze komórki mogą być w różnych stanach Stan 1 Stan 0
16 Sąsiedztwo Stan 1 Stan 0
17 Sąsiedztwo stan = f( stanu sąsiadów ) Stan 1 Stan 0
18 Sąsiedztwo stan = f( stanu sąsiadów ) Stan 1 Stan 0
19 Sąsiedztwo stan = f( stanu sąsiadów ) Stan 1 Stan 0
20 Sąsiedztwo stan = f( stanu sąsiadów ) Stan 1 Stan 0
21 Periodyczne granice siatki Stan 1 Stan 0
22 Periodyczne granice siatki Stan 1 Stan 0
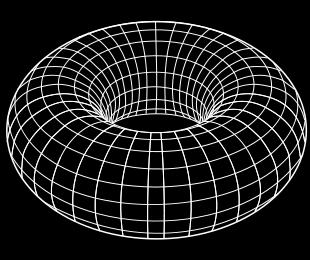
23 Torus
24 Sąsiedztwo pierwszego rzędu - von Neumann Stan 1 Stan 0
25 Sąsiedztwo pierwszego rzędu - von Neumann Stan 1 Stan 0
26 Sąsiedztwo drugiego rzędu - Moore Stan 1 Stan 0
27 Sąsiedztwo trzeciego rzędu Stan 1 Stan 0
28 Sąsiedztwo czwartego rzędu Stan 1 Stan 0
29 Różne sąsiedztwo Stan 1 Stan 0
30 Komórkowe automaty (Cellular Automata) Kolekcja komórek o identycznych wymiarach które mogą posiadać różne stany. Zmiana stanu komórki jest dana przez funkcje sąsiedztwa i zbioru możliwych stanów.
31 KA przekaz informacji A(0) A(1) A Czas
32 np. 2D Przestrzen KA przekaz informacji A(0) A(1) Czas
33 Komórkowe automaty formalnie Ważna komponenta komórkowego automatu (KA) to graf spójny łączący komórki jest to typowo n- wymiarowa siatka Γ Każda komórka jakiegoś KA może być w kilku możliwych stanów. Zbiór stanów, Q, jakiegoś KA jest zbiorem wszystkich możliwych stanów Para (Γ, Q) jest nazywana przestrzeń komórkowa (cell space) danego KA
34 Komórkowe automaty formalnie Konfiguracja, x, danego KA jest odwzorowywanie od grafu to zbioru stanów, która przypisuje jakiś stan zbioru stanów Q dla każdego wierzchołka grafu Γ, tzn. x: Γ Q x(i) = q, gdzie i Γ i q Q Konfiguracje danego KA opisuje stanu na globalnym poziomie
35 Komórkowe automaty formalnie Obliczenia danego KA są procesem lokalnym. Następny stan komórki zależy od obecnego stanu, i stanów sąsiadów. Musimy więc wyrazić pomysł sąsiedztwa komórkowego za pomocy funkcji N. Na przykład zależnie od odległości. Dynamika lokalna (funkcja przejścia) danej komórki, nazywana, δ, jest funkcją która dostaje jako parametry wejściowe stan komórki i jej sąsiadów i oblicza następny stan komórki. Na przykład w 1D: δ(x i-1, x i, x i+1 ) = x i
36 Komórkowe automaty formalnie Formalnie, Komórkowy Automat to kwadrupl M = (Γ, Q, N, δ), gdzie: Γ graf spójny Q zbiór stanów N sąsiedztwo (np. Moore) δ lokalna dynamika


37 Historia automatów komórkowych Stanisław Ulam John von Neumann
38 Komórkowe automaty (Cellular Automata) Prototyp prostego lokalnego przetwarzania informacji umożlwiającego opisywania złożonych wzorców Eksperymentalna matematyka, sztuczna fizyka/życie (Ulam) Sztuczne życie (von Neumann, Langton) Narzędzie modelowania (symulacje przyrodnicze, modelowanie społeczne, ruch samochodowy, etc.)
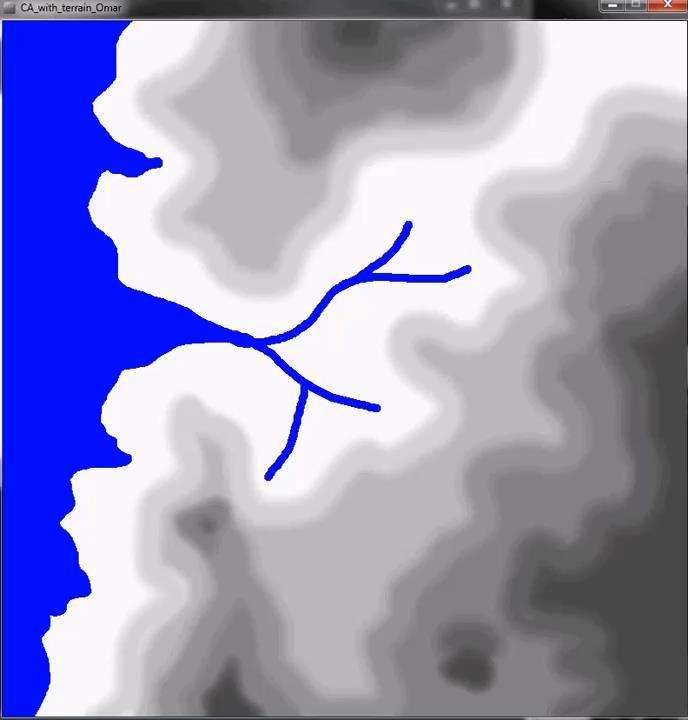
39 Model urbanistyczny

40 Model przemieszczania się piasku

41 Model ognisk leśnych
 John")
42 Przykład: Gra Życia (Game of Life) John Conway
43 Gra Życia Dwa stany: 1 żywa 0 martwa Każda żywa komórka która ma mniej nisz dwóch żywych sąsiadów staje się martwa Każda żywa komórka która ma więcej niż 3 żywych sąsiadów umiera Każda żywa komórka która ma 2 lub 3 żywych sąsiadów pozostaje żywa Każda martwa komórka która ma dokładnie 3 żywych sąsiadów staje się żywa
44 Przykład
45 Przykład
46 Przykład
47 Przykład
48 Przykład
49 Przykład
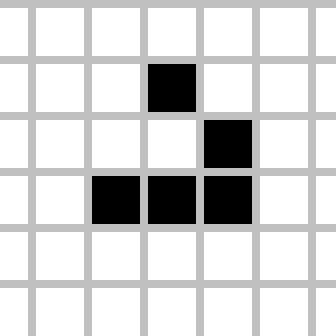
50 Glider
51 Podstawowe wzorce
 Jakie wzorce są stabilne?")
52 Uniwersalny komputer Prosty uniwersum zdolny do obliczeń (kompletność Turinga) Jakie wzorce są stabilne? Jakie chaotyczne?
53 Opinion Dynamics Jak zamodelować dynamikę opinii ludzi np. Dla jakiej partii politycznej zagłosować?
54 Opinion Dynamics Biały: Za Czarny: Przeciw
55 Majority vote Siatka ma być periodyczna Każda komórka przyjmuje stan taki jaki jest większości jej sąsiadów Gdy sumy opinii sąsiadów są równe to komórki nie zmieniają stanu Jaki wzorzec powstanie?

56

57

58
59 Stabilna konfiguracja
60 Stabilna konfiguracja
61 Stabilna konfiguracja
62 Opinion Dynamics CA Model Wytwarzanie porządku Nie łatwo przewidzieć wzorca globalnego Narzędzie stosowane skutecznie w modelowaniu społecznym
63 VPython Moduł do pythona stworzony do interaktywnego modelowania Bardzo łatwy do nauczenia
")
64 Pierwszy krok Uruchomić VIDLE from visual import * sphere() F5
65 Zmiana atrybutów kuli Kolor sphere(color=color.red) Radius sphere(radius=0.5,color=color.red) Nazwa ball = sphere(radius=0.5,color=color.red) Pozycja ball = sphere(pos=(0,2,0),radius=0.5,color=color.red) Zmiana pozycji ball.pos = (1,2,3)
66 Zmiana atrybutów kuli Kolor sphere(color=color.red) Radius sphere(radius=0.5,color=color.red) Nazwa ball = sphere(radius=0.5,color=color.red) Pozycja ball = sphere(pos=(0,2,0),radius=0.5,color=color.red) Zmiana pozycji ball.pos = (1,2,3)
67 Zmiana atrybutów kuli Kolor sphere(color=color.red) Radius sphere(radius=0.5,color=color.red) Nazwa kula = sphere(radius=0.5,color=color.red) Pozycja ball = sphere(pos=(0,2,0),radius=0.5,color=color.red) Zmiana pozycji ball.pos = (1,2,3)
68 Zmiana atrybutów kuli Kolor sphere(color=color.red) Radius sphere(radius=0.5,color=color.red) Nazwa kula = sphere(radius=0.5,color=color.red) Pozycja kula = sphere(pos=(0,2,0),radius=0.5,color=color.red) Zmiana pozycji ball.pos = (1,2,3)
69 Zmiana atrybutów kuli Kolor sphere(color=color.red) Radius sphere(radius=0.5,color=color.red) Nazwa kula = sphere(radius=0.5,color=color.red) Pozycja kula = sphere(pos=(0,2,0),radius=0.5,color=color.red) Zmiana pozycji kula.pos = (1,2,3)
70 Nawigacja Zoom Trzymaj środkowy przycisk myszki i poruszaj myszką Lub, trzymaj lewy i prawy przycisk naraz Obrót Trzymaj prawy przycisk i poruszaj myszka
 pudelko = box(length=10, height=2, width=4,color=color.")
71 Prosta scena from visual import * kula = sphere(pos=(0,2,0),color=color.yellow,radius=1) pudelko = box(length=10, height=2, width=4,color=color.blue)
) scena.fov(1.5) scena.")
72 Display() scena = display(title='cellular Automaton', width=500, height=500, range=(5, 5, 5)) scena.fov(1.5) scena.fov(0.001)
73 Symulacja za pomocy pętli, np.: l=1 while l == 1: rate(n) #częstotliwość odświeżania #zmien pozycje kuli
74 Zadanie Stwórz symulacje kuli która się porusza od lewego boku okienka do prawego w pętli.
75 Zadanie Ułóż przypadkową liczbę kul na siatce 50 x 50?
76 Zadanie Stwórz własny model majority vote tak jak opisano na wykładzie. Co się stanie gdy zmieniamy stan w przypadku równego podziału stanów sąsiednich (4-4)? Co się stanie gdy przydzielamy stan mniejszości sąsiadów ale tylko w przypadku glosowania 5 3?

77 Co trzeba zmienić w naszym KA aby stworzyć takie wzorce?
78 Zadanie Stwórz wykresy populacji i średniej lokalnej gęstości modelu głosowania większościowego. Co da się zauważyć?

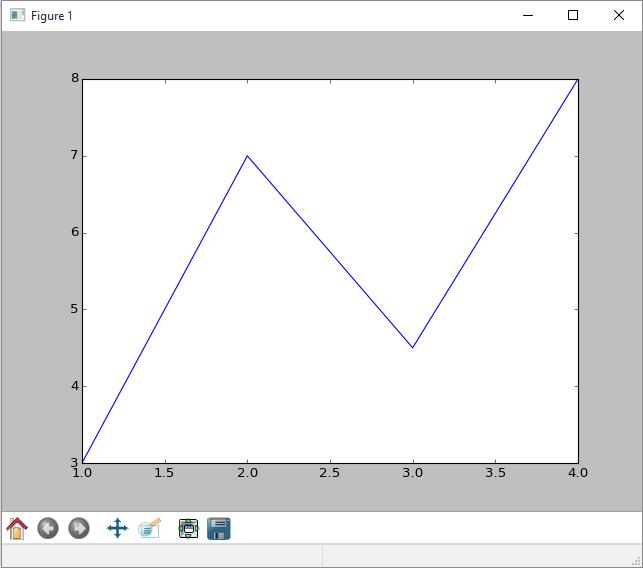
79 matplotlib Najpopularniejszy pakiet do wizualizacji danych Pythona
80 Wykresy
81 Wykresy
82 Wykresy
83 Wykresy
84 Wykresy

85 Wykresy
86
87
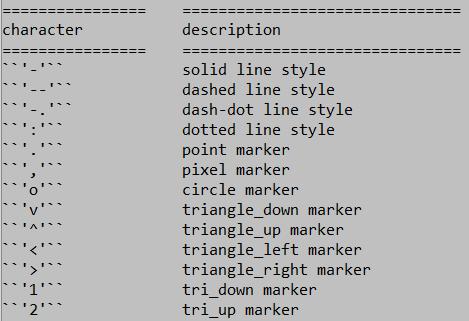
88 plt.plot?
89 stary nowy
90 stary nowy
91
92 Legend
93 Przykład
94 Cellular Automata State change dynamics: Influence dynamics komorka reprezentuje stany Migration dynamics komorka reprezentuje agentow
 Micromotives and Macrobehavior, Norton Co powoduje")
95 Model Segregacji Schellinga Thomas C. Schelling (1978) Micromotives and Macrobehavior, Norton Co powoduje segregacji rasowej i ekonomicznej?
96

97
98 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi biedny 4 X 5 bogaty pusty
99 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi Glosowanie sumy sąsiadów X 5 biedny bogaty pusty
100 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi Glosowanie sumy sąsiadów biedny bogaty pusty X Osoba zmienia lokalizacje gdy suma podobnych sąsiadów jest poniżej jakiegoś progu
101 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi n.p. 3/7 czerwonych sąsiadów zostań 4 X
102 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi n.p. 2/7 czerwonych sąsiadów przeniesienie 4 X
103 Komórkowy Automat Problem: zamodelować decyzje lokalizacji zamieszkania ludzi n.p. 2/7 czerwonych sąsiadów przeniesienie 4 X

104 Netlogo Model
105 Micromotives Macrobehavior
106 Punkty krytyczne (Tipping points)
107 Punkty krytyczne (Tipping points)

")
108 Punkty krytyczne (Tipping points)
109 Exodus tip 2/7 > X
110 Exodus tip 2/7 > X
111 Exodus tip X
112 Exodus tip X
113 Genesis tip 2/7 > X
114 Genesis tip 2/8 < X
115 Genesis tip X
116 Genesis tip X
117
118 Działanie kolektywne (Collective Action) w/06revolution-slideshow.html?_r=0
119 Granovetter s Peer Model N individuals Each has a threshold T j for person j Join if T j others join
120 Przykład
121 Przykład
122 Przykład
123 Przykład
124 Przykład
125 Przykład
126 Przykład
127 Przykład
128 Przykład
129 Przykład
130 Przykład

131 Przykład Średnia = 1.4 Średnia = 2.5
132 Collective Action Niskie progi Więcej wariacji w progach
133 Collective Action Niskie progi Więcej wariacji w progach
134 Collective Action Niskie progi Więcej wariacji w progach
135 Peer Effect
136 Peer Effect Information
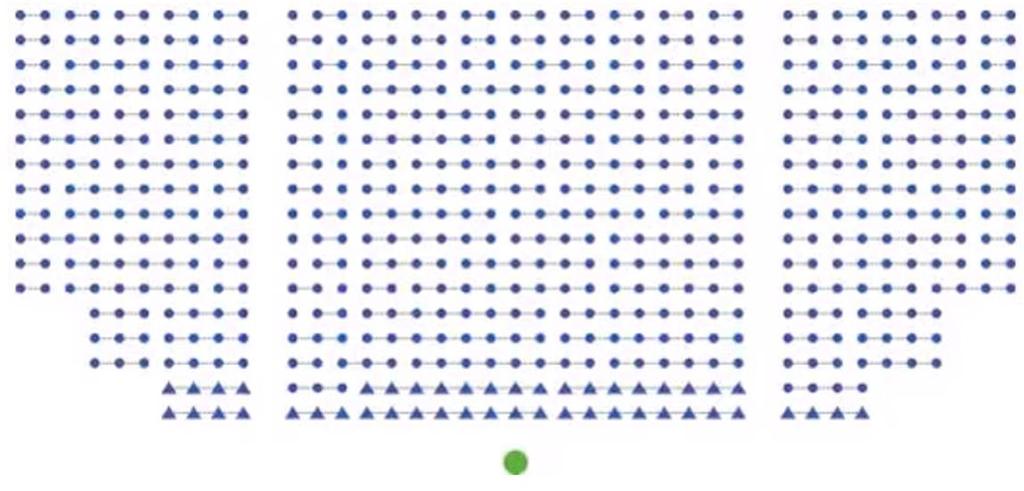
137 Standing Ovation Model (owacje na stojąco) Próg żeby stać: T Jakość przedstawienia: Q Sygnał: S = Q + E Pierwsza reguła Gdy S > T, stać Druga reguła Stać gdy więcej niż X % stoi
138 Standing Ovation Model (owacje na stojąco) Próg żeby stać: T Jakość przedstawienia: Q Sygnał: S = Q + E Pierwsza reguła Gdy S > T, stać Druga reguła Stać gdy więcej niż X % stoi
139 Standing Ovation Model (owacje na stojąco) Próg żeby stać: T Jakość przedstawienia: Q Sygnał: S = Q + E Pierwsza reguła Gdy S > T, stać Druga reguła Stać gdy więcej niż X % stoi
140 Standing Ovation Model (owacje na stojąco) Próg żeby stać: T Jakość przedstawienia: Q Sygnał: S = Q + E Pierwsza reguła Gdy S > T, stać Druga reguła Stać gdy więcej niż X % stoi
141 Standing Ovation Model (owacje na stojąco) Próg żeby stać: T Jakość przedstawienia: Q Sygnał: S = Q + E Pierwsza reguła Gdy S > T, stać Druga reguła Stać gdy więcej niż X % stoi
142 Obserwacja 1 Ilość stojących ludzi jest proporcjonalna do jakości Q Gdy Q + E > T, stać
143 Obserwacja 2 Ilość stojących ludzi jest odwrotnie proporcjonalna do progu T Gdy Q + E > T, stać
144 Obserwacja 3 Ilość stojących ludzi jest odwrotnie proporcjonalna do progu X Stać gdy więcej niż X % stoi
145 Przykład 1000 ludzi T = 60 Q = 50 E = 0 50 < 60
146 Przykład 1000 ludzi T = 60 Q = 50 E = 0 50 < 60
147 Przykład 1000 ludzi T = 60 Q = 50 E [-15, 15]
148 Przykład 1000 ludzi T = 60 Q = 50 E [-15, 15] siedzieć stać S
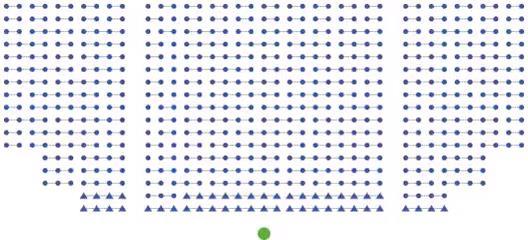
149 Przykład 1000 ludzi T = 60 Q = 50 E [-50, 50] siedzieć stać S
150 Obserwacja 4 Gdy Q < T, wariacja w E może powodować ze ludzie będą stali Gdy Q + E > T, stać
151 Interpretacja wariacji E Publiczność Różnorodna Nie wyrafinowana Przedstawienie Wielowymiarowa Skomplikowane
152 Stojące owacje Wysoka jakość (Q) Duża gotowość do wstania (T) Duże efekty kolektywnego działania (X) Więcej wariacji (E)
153 Stojące owacje Wysoka jakość (Q) Duża gotowość do wstania (T) Duże efekty kolektywnego działania (X) Więcej wariacji (E)
154 Theatre
155 Theatre
156 Theatre
157 Theatre
158 Theatre
159 Theatre
160 Stojące Owacje Wysoka jakość Duża gotowość do wstania Duże efekty kolektywnego działania Więcej wariacji Usadź ludzi gotowych to wstawania blisko sceny (celebryci) Duże grupy
161 Stojące Owacje Wysoka jakość Duża gotowość do wstania Duże efekty kolektywnego działania Więcej wariacji Usadź ludzi gotowych to wstawania blisko sceny (celebryci) Duże grupy
162 Dwa Społeczne Modele Sortowanie (Schelling model) Peer Effects (Standing Ovation model)
163 Sortowanie

164 Sortowanie mixed white black James Moody, Race, school integration, and friendship segregation in America, American Journal of Sociology 107, (2001)

165 Peer Effects (Homophily)

166 Sortowanie czy Peer Effects?
167 Problem Identyfikacji Modelu? Dane pokazujące dynamikę procesu
168 Topologie Gramatyka Siatka

169 Topologie Gramatyka Siatka Przestrzeń Euklidesowa
170 Modelowanie agentowe przestrzeń Euklidesowa Agent to struktura danych która posiada: Pozycje (układzie współrzędnym) Prędkość, orientacje Różne inne parametry Podobnie jak w KA, dynamika modelu wynika z lokalnych interakcji agentów określonych przez reguły interakcje
171 Dynamika modeli agentowych Dana przez interakcje pomiędzy agentami Kolejna iteracja Dla każdego agenta Narysuj agenta Oblicz stan Oblicz sąsiedztwo

172 Algorytm stada / bird flocking (C. Reynolds) Reynolds, Craig (1987). "Flocks, herds and schools: A distributed behavioral model." SIGGRAPH '87: Proceedings of the 14th annual conference on Computer graphics and interactive techniques (Association for Computing Machinery): 25 34
173 Algorytm stada Agent nazywa się boid i składa się z pozycji i prędkości Reguły interakcji zmieniają prędkość i pozycje agentów Spójność Rozdzielność Wyrównanie
174 Sprawdzanie sąsiedztwa Dla pozycji b danego boida sprawdzamy czy wszystkie inne pozycje boidow Ԧx i znajdują się w odległości mniejszej od d: b Ԧx i < d Dla boidow Ԧx i dla których ta nierówność zachodzi sprawdzamy czy kąt odchylenia pomiędzy wektorem prędkości boida Ԧe v i wektorem Ԧe Ԧx i jest mniejszy od α Ԧe Ԧx i Ԧe v < cos(α) Ԧe Ԧx i Ԧe v
 b Ԧx i b Ԧx i b v b v <")
175 Sprawdzanie sąsiedztwa Dla pozycji b danego boida sprawdzamy czy wszystkie inne pozycje boidow Ԧx i znajdują się w odległości mniejszej od d: b Ԧx i < d Dla boidow Ԧx i dla których ta nierówność zachodzi sprawdzamy czy kąt odchylenia pomiędzy wektorem prędkości boida b v i wektorem b Ԧx i jest mniejszy od cos(α) b Ԧx i b Ԧx i b v b v < cos(α)

176 Spójność Obliczamy wektor skierowany do środka masy lokalnego sąsiedztwa Ԧv 1 = σ 1 n Ԧx i n b Spójność
177 Rozdzielność Pseudokod: Ԧv 2 wektor zerowy Dla wszystkich sąsiednich boidow Ԧx i Gdy b Ԧx i < min Zwróć Ԧv 2 To Ԧv 2 = Ԧv 2 (b Ԧx i ) Rozdzielność

178 Wyrównanie Obliczamy średnią prędkość wszystkich sąsiadów Ԧx vi i ustalamy nową prędkość Ԧv 3 Ԧv 3 = σ 1 n Ԧx vi n b v Wyrównanie
179 Wazony Ruch boidow Prędkość: b v = b v + w 1 Ԧv 1 + w 2 Ԧv 2 + w 3 Ԧv 3 Pozycja: b = b + b v
180 Wazony Ruch boidow Prędkość: b v = b v + w 1 Ԧv 1 + w 2 Ԧv 2 + w 3 Ԧv 3 Pozycja: b = b + b v

181
182 Zadanie Zaimplementuj algorytm stada stosując moduł vpython Zastanów się jak dodać atraktor w środku sceny wokół którego boidy będą się przemieszczać Rysowanie boidow w vpython może być realizowane np. za pomocy stożków (cone())

183 Ant trails presentation of phenomenon implementation of model quantification

184 Urban modeling pick a paper present possible implementation

185 Social Force Model Dirk Helbing, Illés Farkas & Tamás Vicsek, Simulating dynamical features of escape panic. Nature 407, (28 September 2000)
186 Boolean nets of gene regulation pick a paper present possible implementation

187 Virtual Anasazi Virtual Anasazi: Modeling a Socio-Economic System of the Past, Gumerman 2001 Present Paper

188 Opinion Dynamics Quantitative Agent Based Model of Opinion Dynamics: Polish Elections of 2015, Sobkowicz Present Paper
Modelowanie wieloskalowe. Automaty Komórkowe - podstawy
 Modelowanie wieloskalowe Automaty Komórkowe - podstawy Dr hab. inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p. 716 lmadej@agh.edu.pl
Modelowanie wieloskalowe Automaty Komórkowe - podstawy Dr hab. inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p. 716 lmadej@agh.edu.pl
Obliczenia inspirowane Naturą
 Obliczenia inspirowane Naturą Wykład 02 Jarosław Miszczak IITiS PAN Gliwice 06/10/2016 1 / 31 Czego dowiedzieliśmy się na poprzednim wykładzie? 1... 2... 3... 2 / 31 1 2 3 3 / 31 to jeden z pierwszych
Obliczenia inspirowane Naturą Wykład 02 Jarosław Miszczak IITiS PAN Gliwice 06/10/2016 1 / 31 Czego dowiedzieliśmy się na poprzednim wykładzie? 1... 2... 3... 2 / 31 1 2 3 3 / 31 to jeden z pierwszych
Automaty komórkowe. Katarzyna Sznajd-Weron
 Automaty komórkowe Katarzyna Sznajd-Weron Trochę historii CA (Cellular Automata) Koniec lat 40-tych John von Neuman maszyna z mechanizmem samopowielania Sugestia Ulama 1952 dyskretny układ komórek dyskretne
Automaty komórkowe Katarzyna Sznajd-Weron Trochę historii CA (Cellular Automata) Koniec lat 40-tych John von Neuman maszyna z mechanizmem samopowielania Sugestia Ulama 1952 dyskretny układ komórek dyskretne
Potęga modeli agentowych
 Potęga modeli agentowych Katarzyna Sznajd-Weron Katedra UNESCO Studiów Interdyscyplinarnych Seminarium S 3, 7 maja 2013 Aperitif (2006) Physicists pretend not only to know everything, but also to know
Potęga modeli agentowych Katarzyna Sznajd-Weron Katedra UNESCO Studiów Interdyscyplinarnych Seminarium S 3, 7 maja 2013 Aperitif (2006) Physicists pretend not only to know everything, but also to know
Układy dynamiczne Chaos deterministyczny
 Układy dynamiczne Chaos deterministyczny Proste iteracje odwzorowań: Funkcja liniowa Funkcja logistyczna chaos deterministyczny automaty komórkowe Ewolucja układu dynamicznego Rozwój w czasie układu dynamicznego
Układy dynamiczne Chaos deterministyczny Proste iteracje odwzorowań: Funkcja liniowa Funkcja logistyczna chaos deterministyczny automaty komórkowe Ewolucja układu dynamicznego Rozwój w czasie układu dynamicznego
Modelowanie wieloskalowe. Automaty Komórkowe - podstawy
 Modelowanie wieloskalowe Automaty Komórkowe - podstawy Dr hab. inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p. 716 lmadej@agh.edu.pl
Modelowanie wieloskalowe Automaty Komórkowe - podstawy Dr hab. inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p. 716 lmadej@agh.edu.pl
Wymagania edukacyjne z matematyki dla klasy III gimnazjum
 Wymagania edukacyjne z matematyki dla klasy III gimnazjum Poziomy wymagań edukacyjnych: K konieczny dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, powinien je zatem opanować każdy
Wymagania edukacyjne z matematyki dla klasy III gimnazjum Poziomy wymagań edukacyjnych: K konieczny dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, powinien je zatem opanować każdy
MATEMATYKA - WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY
 MATEMATYKA - WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KLASA III GIMNAZJUM Wymagania konieczne (K) dotyczą zagadnień elementarnych, podstawowych; powinien je opanować każdy uczeń. Wymagania podstawowe
MATEMATYKA - WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KLASA III GIMNAZJUM Wymagania konieczne (K) dotyczą zagadnień elementarnych, podstawowych; powinien je opanować każdy uczeń. Wymagania podstawowe
oności. Zastosowanie modelowania Agent-based Computational Economics w nauczaniu zdalnym
 Ekonomia złożonoz oności. Zastosowanie modelowania Agent-based Computational Economics w nauczaniu zdalnym Tomasz Kopczewski Wydział Nauk Ekonomicznych, Uniwersytet Warszawski Mikroekonomia Praktyka wykładania:
Ekonomia złożonoz oności. Zastosowanie modelowania Agent-based Computational Economics w nauczaniu zdalnym Tomasz Kopczewski Wydział Nauk Ekonomicznych, Uniwersytet Warszawski Mikroekonomia Praktyka wykładania:
PRZEDMIOTOWE ZASADY OCENIANIA I WYMAGANIA EDUKACYJNE Z MATEMATYKI Klasa 3
 PRZEDMIOTOWE ZASADY OCENIANIA I WYMAGANIA EDUKACYJNE Z MATEMATYKI Klasa 3 I. FUNKCJE grupuje elementy w zbiory ze względu na wspólne cechy wymienia elementy zbioru rozpoznaje funkcje wśród przyporządkowań
PRZEDMIOTOWE ZASADY OCENIANIA I WYMAGANIA EDUKACYJNE Z MATEMATYKI Klasa 3 I. FUNKCJE grupuje elementy w zbiory ze względu na wspólne cechy wymienia elementy zbioru rozpoznaje funkcje wśród przyporządkowań
MODELOWANIE RZECZYWISTOŚCI
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
Ruch drogowy, korki uliczne - czy fizyk może coś na to poradzić?
 Ruch drogowy, korki uliczne - czy fizyk może coś na to poradzić? KNF Migacz, Instytut Fizyki Teoretycznej, Uniwersytet Wrocławski 16-18 listopada 2007 Spis treści Spis treści 1 Spis treści 1 2 Spis treści
Ruch drogowy, korki uliczne - czy fizyk może coś na to poradzić? KNF Migacz, Instytut Fizyki Teoretycznej, Uniwersytet Wrocławski 16-18 listopada 2007 Spis treści Spis treści 1 Spis treści 1 2 Spis treści
Przedmiotowe zasady oceniania i wymagania edukacyjne
 Agnieszka Kamińska, Dorota Ponczek Matematyka na czasie Gimnazjum, klasa 3 Przedmiotowe zasady oceniania i wymagania edukacyjne Przed przystąpieniem do omawiania zagadnień programowych i przed rozwiązywaniem
Agnieszka Kamińska, Dorota Ponczek Matematyka na czasie Gimnazjum, klasa 3 Przedmiotowe zasady oceniania i wymagania edukacyjne Przed przystąpieniem do omawiania zagadnień programowych i przed rozwiązywaniem
LIVE Gra w życie. LIVE w JavaScript krok po kroku. ANIMACJA Rozpoczynamy od podstawowego schematu stosowanego w animacji
 LIVE Gra w życie Live jest jednym z pierwszych i najbardziej znanych tzw. automatów komórkowych. Został wymyślony w 1970 roku przez brytyjskiego matematyka Johna Conwaya. Co to takiego automat komórkowy?
LIVE Gra w życie Live jest jednym z pierwszych i najbardziej znanych tzw. automatów komórkowych. Został wymyślony w 1970 roku przez brytyjskiego matematyka Johna Conwaya. Co to takiego automat komórkowy?
Modelowanie systemów biomedycznych
 Modelowanie systemów biomedycznych - automaty komórkowe (czy jest to "nowe oblicze nauki"?) Arkadiusz Mandowski Modelowanie... R. Tadeusiewicz (2008) Modelowanie... R. Tadeusiewicz (2008) Jak rozpoznać
Modelowanie systemów biomedycznych - automaty komórkowe (czy jest to "nowe oblicze nauki"?) Arkadiusz Mandowski Modelowanie... R. Tadeusiewicz (2008) Modelowanie... R. Tadeusiewicz (2008) Jak rozpoznać
Mateusz Żyliński Tadeusz Włodarkiewicz. WireWorld. Zebranie informacji dotyczących tematyki projektu oraz przedstawienie koncepcji realizacji projektu
 Mateusz Żyliński Tadeusz Włodarkiewicz WireWorld Zebranie informacji dotyczących tematyki projektu oraz przedstawienie koncepcji realizacji projektu 1 I. Informacje ogólne A utomat komórkowy to system
Mateusz Żyliński Tadeusz Włodarkiewicz WireWorld Zebranie informacji dotyczących tematyki projektu oraz przedstawienie koncepcji realizacji projektu 1 I. Informacje ogólne A utomat komórkowy to system
Agnieszka Kamińska, Dorota Ponczek. Matematyka na czasie Gimnazjum, klasa 3 Rozkład materiału i plan wynikowy
 Agnieszka Kamińska, Dorota Ponczek Matematyka na czasie Gimnazjum, klasa Rozkład materiału i plan wynikowy I. FUNKCJE 1 1. Pojęcie funkcji zbiór i jego elementy pojęcie przyporządkowania pojęcie funkcji
Agnieszka Kamińska, Dorota Ponczek Matematyka na czasie Gimnazjum, klasa Rozkład materiału i plan wynikowy I. FUNKCJE 1 1. Pojęcie funkcji zbiór i jego elementy pojęcie przyporządkowania pojęcie funkcji
Tworzenie gier na urządzenia mobilne
 Katedra Inżynierii Wiedzy Wykład 11 O czym dzisiaj? labirynty, dużo labiryntów; automaty komórkowe; algorytmy do budowy labiryntów; algorytmy do szukania wyjścia z labiryntów; Blueprints i drzewa zachowań
Katedra Inżynierii Wiedzy Wykład 11 O czym dzisiaj? labirynty, dużo labiryntów; automaty komórkowe; algorytmy do budowy labiryntów; algorytmy do szukania wyjścia z labiryntów; Blueprints i drzewa zachowań
ZESPÓŁ SZKÓŁ W OBRZYCKU
 Matematyka na czasie Program nauczania matematyki w gimnazjum ZGODNY Z PODSTAWĄ PROGRAMOWĄ I z dn. 23 grudnia 2008 r. Autorzy: Agnieszka Kamińska, Dorota Ponczek ZESPÓŁ SZKÓŁ W OBRZYCKU Wymagania edukacyjne
Matematyka na czasie Program nauczania matematyki w gimnazjum ZGODNY Z PODSTAWĄ PROGRAMOWĄ I z dn. 23 grudnia 2008 r. Autorzy: Agnieszka Kamińska, Dorota Ponczek ZESPÓŁ SZKÓŁ W OBRZYCKU Wymagania edukacyjne
Temat lekcji Zakres treści Osiągnięcia uczeń: I. FUNKCJE 14
 I. FUNKCJE 1 Podstawowe Ponadpodstawowe grupuje dane elementy w zbiory ze względu na wspólne cechy wymienia elementy zbioru rozpoznaje funkcje wśród przyporządkowa opisanych słownie lub za pomocą grafu
I. FUNKCJE 1 Podstawowe Ponadpodstawowe grupuje dane elementy w zbiory ze względu na wspólne cechy wymienia elementy zbioru rozpoznaje funkcje wśród przyporządkowa opisanych słownie lub za pomocą grafu
INSTRUKCJA DO ĆWICZENIA NR 4
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 4 PRZEDMIOT TEMAT OPRACOWAŁ MECHANIKA UKŁADÓW MECHANCZNYCH Modelowanie fizyczne układu o dwóch stopniach
WIZUALIZACJA I STEROWANIE ROBOTEM
 Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
Ćwiczenia z przetwarzania tablic 2D
 Ćwiczenia z przetwarzania tablic 2D Wyświetlanie tablic 2D Jako wstęp do przetwarzania obrazów w pythonie przećwiczmy podstawowe operacje na dwuwymiarowych tablicach numpy w postaci których będziemy takie
Ćwiczenia z przetwarzania tablic 2D Wyświetlanie tablic 2D Jako wstęp do przetwarzania obrazów w pythonie przećwiczmy podstawowe operacje na dwuwymiarowych tablicach numpy w postaci których będziemy takie
Turing i jego maszyny
 Turing Magdalena Lewandowska Politechnika Śląska, wydział MS, semestr VI 20 kwietnia 2016 1 Kim był Alan Turing? Biografia 2 3 Mrówka Langtona Bomba Turinga 4 Biografia Kim był Alan Turing? Biografia Alan
Turing Magdalena Lewandowska Politechnika Śląska, wydział MS, semestr VI 20 kwietnia 2016 1 Kim był Alan Turing? Biografia 2 3 Mrówka Langtona Bomba Turinga 4 Biografia Kim był Alan Turing? Biografia Alan
 Klasyfikator liniowy Wstęp Klasyfikator liniowy jest najprostszym możliwym klasyfikatorem. Zakłada on liniową separację liniowy podział dwóch klas między sobą. Przedstawia to poniższy rysunek: 5 4 3 2
Klasyfikator liniowy Wstęp Klasyfikator liniowy jest najprostszym możliwym klasyfikatorem. Zakłada on liniową separację liniowy podział dwóch klas między sobą. Przedstawia to poniższy rysunek: 5 4 3 2
PSO Rój cząsteczek - Particle Swarm Optimization. Michał Szopiak
 PSO Rój cząsteczek - Particle Swarm Optimization Michał Szopiak Inspiracje biologiczne Algorytm PSO wywodzą się z obserwacji gróp zwierzą tworzony przez członków ptasich stad, czy ławic ryb, który umożliwia
PSO Rój cząsteczek - Particle Swarm Optimization Michał Szopiak Inspiracje biologiczne Algorytm PSO wywodzą się z obserwacji gróp zwierzą tworzony przez członków ptasich stad, czy ławic ryb, który umożliwia
Obliczenia inspirowane Naturą
 Obliczenia inspirowane Naturą Wykład 03 (uzupełnienie Wykładu 02) Jarosław Miszczak IITiS PAN Gliwice 31/03/2016 1 / 17 1 2 / 17 Dynamika populacji Równania Lotki-Voltery opisują model drapieżnik-ofiara.
Obliczenia inspirowane Naturą Wykład 03 (uzupełnienie Wykładu 02) Jarosław Miszczak IITiS PAN Gliwice 31/03/2016 1 / 17 1 2 / 17 Dynamika populacji Równania Lotki-Voltery opisują model drapieżnik-ofiara.
Podręcznik. Model czy teoria
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 58 92 424 http://www.neuroinf.pl/members/danek/swps/ Iwo Białynicki-Birula Iwona Białynicka-Birula
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 58 92 424 http://www.neuroinf.pl/members/danek/swps/ Iwo Białynicki-Birula Iwona Białynicka-Birula
FUNKCJA LINIOWA - WYKRES. y = ax + b. a i b to współczynniki funkcji, które mają wartości liczbowe
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (postać kierunkowa) Funkcja liniowa to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości liczbowe Szczególnie ważny w postaci
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych
 Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Algorytmy decyzyjne będące alternatywą dla sieci neuronowych Piotr Dalka Przykładowe algorytmy decyzyjne Sztuczne sieci neuronowe Algorytm k najbliższych sąsiadów Kaskada klasyfikatorów AdaBoost Naiwny
Temat: Konstrukcja prostej przechodzącej przez punkt A i prostopadłej do danej prostej k.
 Temat: Konstrukcja prostej przechodzącej przez punkt A i prostopadłej do danej prostej k. Cel: Uczeń, przy użyciu programu GeoGebra, stworzy model przestrzenny graniastosłupa i wykorzysta go w zadaniach
Temat: Konstrukcja prostej przechodzącej przez punkt A i prostopadłej do danej prostej k. Cel: Uczeń, przy użyciu programu GeoGebra, stworzy model przestrzenny graniastosłupa i wykorzysta go w zadaniach
Wstęp do sieci neuronowych, wykład 07 Uczenie nienadzorowane.
 Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 212-11-28 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 212-11-28 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
MODELOWANIE RZECZYWISTOŚCI
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH
 FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
FUNKCJA LINIOWA, RÓWNANIA I UKŁADY RÓWNAŃ LINIOWYCH PROPORCJONALNOŚĆ PROSTA Proporcjonalnością prostą nazywamy zależność między dwoma wielkościami zmiennymi x i y, określoną wzorem: y = a x Gdzie a jest
SIMR 2016/2017, Analiza 2, wykład 1, Przestrzeń wektorowa
 SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
SIMR 06/07, Analiza, wykład, 07-0- Przestrzeń wektorowa Przestrzeń wektorowa (liniowa) - przestrzeń (zbiór) w której określone są działania (funkcje) dodawania elementów i mnożenia elementów przez liczbę
Data Mining Wykład 9. Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster. Plan wykładu. Sformułowanie problemu
 Grupowanie hierarchiczne O-Cluster. Plan wykładu. Sformułowanie problemu") Data Mining Wykład 9 Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster Plan wykładu Wprowadzanie Definicja problemu Klasyfikacja metod grupowania Grupowanie hierarchiczne Sformułowanie problemu
Data Mining Wykład 9 Analiza skupień (grupowanie) Grupowanie hierarchiczne O-Cluster Plan wykładu Wprowadzanie Definicja problemu Klasyfikacja metod grupowania Grupowanie hierarchiczne Sformułowanie problemu
GRK 2. dr Wojciech Palubicki
 GRK dr Wojciech Palubicki Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja -y -y Macierz rotacji M wobec punktu
GRK dr Wojciech Palubicki Macierz wektor produkt jako Transformacja T: R n R m T Ԧx = A Ԧx Przemieszczanie wierzchołków - Transformacje Skalowanie Rotacja Translacja -y -y Macierz rotacji M wobec punktu
FUNKCJA LINIOWA - WYKRES
 FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
FUNKCJA LINIOWA - WYKRES Wzór funkcji liniowej (Postać kierunkowa) Funkcja liniowa jest podstawowym typem funkcji. Jest to funkcja o wzorze: y = ax + b a i b to współczynniki funkcji, które mają wartości
Opis implementacji: Poznanie zasad tworzenia programów komputerowych za pomocą instrukcji języka programowania.
 Nazwa implementacji: Robot biedronka Autor: Jarosław Żok Opis implementacji: Poznanie zasad tworzenia programów komputerowych za pomocą instrukcji języka programowania. Gra została zaimplementowana z wykorzystaniem
Nazwa implementacji: Robot biedronka Autor: Jarosław Żok Opis implementacji: Poznanie zasad tworzenia programów komputerowych za pomocą instrukcji języka programowania. Gra została zaimplementowana z wykorzystaniem
Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015
 Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015 2 6 + 3 1. Oblicz 3. 3 x 1 3x 2. Rozwiąż nierówność > x. 2 3 3. Funkcja f przyporządkowuje każdej
Praca kontrolna z matematyki nr 1 Liceum Ogólnokształcące dla Dorosłych Semestr 5 Rok szkolny 2014/2015 2 6 + 3 1. Oblicz 3. 3 x 1 3x 2. Rozwiąż nierówność > x. 2 3 3. Funkcja f przyporządkowuje każdej
W dowolnym kwadracie 3x3 ustawiamy komórki na palące się (stan 3). Program powinien pokazywać ewolucję pożaru lasu.
. Program powinien pokazywać ewolucję pożaru lasu.") 1. Symulacja pożaru lasu ver. 1 Las reprezentowany jest przez macierz 100x100. W lesie występują dwa rodzaje drzew: liściaste i iglaste. Przyjmijmy, że prostokąt A(1:50,1:100) wypełniony jest drzewami
1. Symulacja pożaru lasu ver. 1 Las reprezentowany jest przez macierz 100x100. W lesie występują dwa rodzaje drzew: liściaste i iglaste. Przyjmijmy, że prostokąt A(1:50,1:100) wypełniony jest drzewami
MODELOWANIE RZECZYWISTOŚCI
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/ Podręcznik Iwo Białynicki-Birula Iwona
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN d.wojcik@nencki.gov.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/ Podręcznik Iwo Białynicki-Birula Iwona
Sortowanie topologiczne skierowanych grafów acyklicznych
 Sortowanie topologiczne skierowanych grafów acyklicznych Metody boolowskie w informatyce Robert Sulkowski http://robert.brainusers.net 23 stycznia 2010 1 Definicja 1 (Cykl skierowany). Niech C = (V, A)
Sortowanie topologiczne skierowanych grafów acyklicznych Metody boolowskie w informatyce Robert Sulkowski http://robert.brainusers.net 23 stycznia 2010 1 Definicja 1 (Cykl skierowany). Niech C = (V, A)
MODELOWANIE RZECZYWISTOŚCI
 MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
MODELOWANIE RZECZYWISTOŚCI Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl dwojcik@swps.edu.pl tel. 022 5892 424 http://www.neuroinf.pl/members/danek/swps/
Wstęp do sieci neuronowych, wykład 07 Uczenie nienadzorowane.
 Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 213-11-19 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Wstęp do sieci neuronowych, wykład 7. M. Czoków, J. Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika w Toruniu 213-11-19 Projekt pn. Wzmocnienie potencjału dydaktycznego UMK w Toruniu
Funkcja liniowa - podsumowanie
 Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Czym jest wykrywanie kolizji. Elementarne metody detekcji kolizji. Trochę praktyki: Jak przygotować Visual Studio 2010 do pracy z XNA pod Windows
 Czym jest wykrywanie kolizji. Elementarne metody detekcji kolizji. Trochę praktyki: Jak przygotować Visual Studio 2010 do pracy z XNA pod Windows Phone 7. Skąd i jakie paczki pobrać. Coś napiszemy :-)
Czym jest wykrywanie kolizji. Elementarne metody detekcji kolizji. Trochę praktyki: Jak przygotować Visual Studio 2010 do pracy z XNA pod Windows Phone 7. Skąd i jakie paczki pobrać. Coś napiszemy :-)
FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE
 Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Modelowanie Wieloskalowe. Automaty Komórkowe w Inżynierii Materiałowej
 Modelowanie Wieloskalowe Automaty Komórkowe w Inżynierii Materiałowej Dr inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p.
Modelowanie Wieloskalowe Automaty Komórkowe w Inżynierii Materiałowej Dr inż. Łukasz Madej Katedra Informatyki Stosowanej i Modelowania Wydział Inżynierii Metali i Informatyki Przemysłowej Budynek B5 p.
Wykład 3. Rozkład normalny
 Funkcje gęstości Rozkład normalny Reguła 68-95-99.7 % Wykład 3 Rozkład normalny Standardowy rozkład normalny Prawdopodobieństwa i kwantyle dla rozkładu normalnego Funkcja gęstości Frakcja studentów z vocabulary
Funkcje gęstości Rozkład normalny Reguła 68-95-99.7 % Wykład 3 Rozkład normalny Standardowy rozkład normalny Prawdopodobieństwa i kwantyle dla rozkładu normalnego Funkcja gęstości Frakcja studentów z vocabulary
Katarzyna Jesionek Zastosowanie symulacji dynamiki cieczy oraz ośrodków sprężystych w symulatorach operacji chirurgicznych.
 Katarzyna Jesionek Zastosowanie symulacji dynamiki cieczy oraz ośrodków sprężystych w symulatorach operacji chirurgicznych. Jedną z metod symulacji dynamiki cieczy jest zastosowanie metody siatkowej Boltzmanna.
Katarzyna Jesionek Zastosowanie symulacji dynamiki cieczy oraz ośrodków sprężystych w symulatorach operacji chirurgicznych. Jedną z metod symulacji dynamiki cieczy jest zastosowanie metody siatkowej Boltzmanna.
Zastosowanie CP-grafów do generacji siatek
 Zastosowanie CP-grafów do generacji siatek 1 Cel zajęć Celem zajęć jest praktyczne zaznajomienie się z pojęciem CP-grafu i gramatyk grafowych, przy pomocy których można je tworzyć i nimi manipulować. Jako
Zastosowanie CP-grafów do generacji siatek 1 Cel zajęć Celem zajęć jest praktyczne zaznajomienie się z pojęciem CP-grafu i gramatyk grafowych, przy pomocy których można je tworzyć i nimi manipulować. Jako
LUBELSKA PRÓBA PRZED MATURĄ 2018 poziom podstawowy
 LUELSK PRÓ PRZED MTURĄ 08 poziom podstawowy Schemat oceniania Zadania zamknięte (Podajemy kartotekę zadań, która ułatwi Państwu przeprowadzenie jakościowej analizy wyników). Zadanie. (0 ). Liczby rzeczywiste.
LUELSK PRÓ PRZED MTURĄ 08 poziom podstawowy Schemat oceniania Zadania zamknięte (Podajemy kartotekę zadań, która ułatwi Państwu przeprowadzenie jakościowej analizy wyników). Zadanie. (0 ). Liczby rzeczywiste.
DZIAŁ 1. STATYSTYKA DZIAŁ 2. FUNKCJE
 DZIAŁ 1. STATYSTYKA poda pojęcie diagramu słupkowego i kołowego (2) poda pojęcie wykresu (2) poda potrzebę korzystania z różnych form prezentacji informacji (2) poda pojęcie średniej, mediany (2) obliczy
DZIAŁ 1. STATYSTYKA poda pojęcie diagramu słupkowego i kołowego (2) poda pojęcie wykresu (2) poda potrzebę korzystania z różnych form prezentacji informacji (2) poda pojęcie średniej, mediany (2) obliczy
MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON
 29 BOLESŁAW TABIŚ 1, SZYMON SKONECZNY 1 MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON Streszczenie Opracowano automat komórkowy
29 BOLESŁAW TABIŚ 1, SZYMON SKONECZNY 1 MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON Streszczenie Opracowano automat komórkowy
SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ. Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska
 SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska DRZEWO REGRESYJNE Sposób konstrukcji i przycinania
SYSTEMY UCZĄCE SIĘ WYKŁAD 4. DRZEWA REGRESYJNE, INDUKCJA REGUŁ Częstochowa 2014 Dr hab. inż. Grzegorz Dudek Wydział Elektryczny Politechnika Częstochowska DRZEWO REGRESYJNE Sposób konstrukcji i przycinania
Matematyka II. Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 2018/2019 wykład 13 (27 maja)
") Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
Matematyka II Bezpieczeństwo jądrowe i ochrona radiologiczna Semestr letni 208/209 wykład 3 (27 maja) Całki niewłaściwe przedział nieograniczony Rozpatrujemy funkcje ciągłe określone na zbiorach < a, ),
Wykład 9: Markov Chain Monte Carlo
 RAP 412 17.12.2008 Wykład 9: Markov Chain Monte Carlo Wykładowca: Andrzej Ruciński Pisarz: Ewelina Rychlińska i Wojciech Wawrzyniak Wstęp W tej części wykładu zajmiemy się zastosowaniami łańcuchów Markowa
RAP 412 17.12.2008 Wykład 9: Markov Chain Monte Carlo Wykładowca: Andrzej Ruciński Pisarz: Ewelina Rychlińska i Wojciech Wawrzyniak Wstęp W tej części wykładu zajmiemy się zastosowaniami łańcuchów Markowa
W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora.
 1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
1. Podstawy matematyki 1.1. Geometria analityczna W naukach technicznych większość rozpatrywanych wielkości możemy zapisać w jednej z trzech postaci: skalara, wektora oraz tensora. Skalarem w fizyce nazywamy
Matematyczne Podstawy Informatyki
 Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Informacje podstawowe 1. Konsultacje: pokój
Matematyczne Podstawy Informatyki dr inż. Andrzej Grosser Instytut Informatyki Teoretycznej i Stosowanej Politechnika Częstochowska Rok akademicki 2013/2014 Informacje podstawowe 1. Konsultacje: pokój
MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON
 BOLESŁAW TABIŚ, SZYMON SKONECZNY MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON Streszczenie Abstract Opracowano automat komórkowy
BOLESŁAW TABIŚ, SZYMON SKONECZNY MODELOWANIE STRUKTURY BIOFILMU PRZY UŻYCIU AUTOMATU KOMÓRKOWEGO MODELING OF BIOFILM STRUCTURE USING CELLULAR AUTOMATON Streszczenie Abstract Opracowano automat komórkowy
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach.
 Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach. Dodatkowo w zadaniu tym, ćwiczone są umiejętności w nadawaniu kolorów wypełnienia i obrysu oraz w używaniu
Cel ćwiczenia: Celem ćwiczenia jest nabranie wprawy w rysowaniu kół i okręgów o zadanych rozmiarach. Dodatkowo w zadaniu tym, ćwiczone są umiejętności w nadawaniu kolorów wypełnienia i obrysu oraz w używaniu
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
Funkcja kwadratowa. f(x) = ax 2 + bx + c,
 = ax 2 + bx + c,") Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax 2 + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax 2, a R \
Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax 2 + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax 2, a R \
Systemy uczące się Lab 4
 Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Systemy uczące się Lab 4 dr Przemysław Juszczuk Katedra Inżynierii Wiedzy, Uniwersytet Ekonomiczny 26 X 2018 Projekt zaliczeniowy Podstawą zaliczenia ćwiczeń jest indywidualne wykonanie projektu uwzględniającego
Analiza składowych głównych. Wprowadzenie
 Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
RACHUNEK MACIERZOWY. METODY OBLICZENIOWE Budownictwo, studia I stopnia, semestr 6. Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska
 RACHUNEK MACIERZOWY METODY OBLICZENIOWE Budownictwo, studia I stopnia, semestr 6 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Czym jest macierz? Definicja Macierzą A nazywamy
RACHUNEK MACIERZOWY METODY OBLICZENIOWE Budownictwo, studia I stopnia, semestr 6 Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Czym jest macierz? Definicja Macierzą A nazywamy
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova
 Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
Wstęp do sieci neuronowych, wykład 11 Łańcuchy Markova M. Czoków, J. Piersa 2010-12-21 1 Definicja Własności Losowanie z rozkładu dyskretnego 2 3 Łańcuch Markova Definicja Własności Losowanie z rozkładu
Wprowadzenie do środowiska MATLAB z zastosowaniami w modelowaniu i analizie danych
 Wprowadzenie do środowiska MATLAB z zastosowaniami w modelowaniu i analizie danych Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl tel. 022
Wprowadzenie do środowiska MATLAB z zastosowaniami w modelowaniu i analizie danych Daniel Wójcik Instytut Biologii Doświadczalnej PAN Szkoła Wyższa Psychologii Społecznej d.wojcik@nencki.gov.pl tel. 022
Kurs ZDAJ MATURĘ Z MATEMATYKI - MODUŁ 11 Teoria planimetria
 1 Pomimo, że ten dział, to typowa geometria wydawałoby się trudny dział to paradoksalnie troszkę tu odpoczniemy, jeśli chodzi o teorię. Dlaczego? Otóż jak zapewne doskonale wiesz, na maturze otrzymasz
1 Pomimo, że ten dział, to typowa geometria wydawałoby się trudny dział to paradoksalnie troszkę tu odpoczniemy, jeśli chodzi o teorię. Dlaczego? Otóż jak zapewne doskonale wiesz, na maturze otrzymasz
Moduł Grafika komputerowa i multimedia 312[01].S2. Ćwiczenia Podstawy programu Autocad 2011 Prosta
![Moduł Grafika komputerowa i multimedia 312[01].S2. Ćwiczenia Podstawy programu Autocad 2011 Prosta](/thumbs/24/3028032.jpg "Moduł Grafika komputerowa i multimedia 312[01].S2. Ćwiczenia Podstawy programu Autocad 2011 Prosta") Moduł Grafika komputerowa i multimedia 312[01].S2 Ćwiczenia Podstawy programu Autocad 2011 Prosta Opracowanie: mgr inż. Aleksandra Miętus na podstawie książki Autocad 2000 ćwiczenia praktyczne. wyd. Helion
Moduł Grafika komputerowa i multimedia 312[01].S2 Ćwiczenia Podstawy programu Autocad 2011 Prosta Opracowanie: mgr inż. Aleksandra Miętus na podstawie książki Autocad 2000 ćwiczenia praktyczne. wyd. Helion
Wymagania kl. 3. Zakres podstawowy i rozszerzony
 Wymagania kl. 3 Zakres podstawowy i rozszerzony Temat lekcji Zakres treści Osiągnięcia ucznia 1. RACHUNEK PRAWDOPODOBIEŃSTWA 1. Reguła mnożenia reguła mnożenia ilustracja zbioru wyników doświadczenia za
Wymagania kl. 3 Zakres podstawowy i rozszerzony Temat lekcji Zakres treści Osiągnięcia ucznia 1. RACHUNEK PRAWDOPODOBIEŃSTWA 1. Reguła mnożenia reguła mnożenia ilustracja zbioru wyników doświadczenia za
w najprostszych przypadkach, np. dla trójkątów równobocznych
 MATEMATYKA - klasa 3 gimnazjum kryteria ocen według treści nauczania (Przyjmuje się, że jednym z warunków koniecznych uzyskania danej oceny jest spełnienie wszystkich wymagań na oceny niższe.) Dział programu
MATEMATYKA - klasa 3 gimnazjum kryteria ocen według treści nauczania (Przyjmuje się, że jednym z warunków koniecznych uzyskania danej oceny jest spełnienie wszystkich wymagań na oceny niższe.) Dział programu
Pole wielokąta. Wejście. Wyjście. Przykład
 Pole wielokąta Liczba punktów: 60 Limit czasu: 1-3s Limit pamięci: 26MB Oblicz pole wielokąta wypukłego. Wielokąt wypukły jest to wielokąt, który dla dowolnych jego dwóch punktów zawiera również odcinek
Pole wielokąta Liczba punktów: 60 Limit czasu: 1-3s Limit pamięci: 26MB Oblicz pole wielokąta wypukłego. Wielokąt wypukły jest to wielokąt, który dla dowolnych jego dwóch punktów zawiera również odcinek
Wykład 6 Centralne Twierdzenie Graniczne. Rozkłady wielowymiarowe
 Wykład 6 Centralne Twierdzenie Graniczne. Rozkłady wielowymiarowe Nierówność Czebyszewa Niech X będzie zmienną losową o skończonej wariancji V ar(x). Wtedy wartość oczekiwana E(X) też jest skończona i
Wykład 6 Centralne Twierdzenie Graniczne. Rozkłady wielowymiarowe Nierówność Czebyszewa Niech X będzie zmienną losową o skończonej wariancji V ar(x). Wtedy wartość oczekiwana E(X) też jest skończona i
Elementy inteligencji obliczeniowej
 Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Podstawy fizyki sezon 1 V. Pęd, zasada zachowania pędu, zderzenia
 Podstawy fizyki sezon 1 V. Pęd, zasada zachowania pędu, zderzenia Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha
Podstawy fizyki sezon 1 V. Pęd, zasada zachowania pędu, zderzenia Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha
CorelDraw - wbudowane obiekty wektorowe - prostokąty Rysowanie prostokątów
 CorelDraw - wbudowane obiekty wektorowe - prostokąty Rysowanie prostokątów Naciskamy klawisz F6 lub klikamy w ikonę prostokąta w przyborniku po lewej stronie ekranu - zostanie wybrane narzędzie prostokąt.
CorelDraw - wbudowane obiekty wektorowe - prostokąty Rysowanie prostokątów Naciskamy klawisz F6 lub klikamy w ikonę prostokąta w przyborniku po lewej stronie ekranu - zostanie wybrane narzędzie prostokąt.
Wstęp do programowania
 Wstęp do programowania Podstawowe konstrukcje programistyczne Paweł Daniluk Wydział Fizyki Jesień 2014 P. Daniluk (Wydział Fizyki) WP w. II Jesień 2014 1 / 38 Przypomnienie Programowanie imperatywne Program
Wstęp do programowania Podstawowe konstrukcje programistyczne Paweł Daniluk Wydział Fizyki Jesień 2014 P. Daniluk (Wydział Fizyki) WP w. II Jesień 2014 1 / 38 Przypomnienie Programowanie imperatywne Program
Zagadnienia do małej matury z matematyki klasa II Poziom podstawowy i rozszerzony
 Zagadnienia do małej matury z matematyki klasa II Poziom podstawowy i rozszerzony Uczeń realizujący zakres rozszerzony powinien również spełniać wszystkie wymagania w zakresie poziomu podstawowego. Zakres
Zagadnienia do małej matury z matematyki klasa II Poziom podstawowy i rozszerzony Uczeń realizujący zakres rozszerzony powinien również spełniać wszystkie wymagania w zakresie poziomu podstawowego. Zakres
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ.
 A WYMAGANIA PODSTAWY PROGRAMOWEJ.") ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
Wymagania z matematyki na poszczególne stopnie szkolne w klasie trzeciej gimnazjum
 Wymagania z matematyki na poszczególne stopnie szkolne w klasie trzeciej gimnazjum I LICZBY I WYRAŻENIA ALGEBRAICZNE podawanie przykładów liczb naturalnych, całkowitych, wymiernych i niewymiernych; porównywanie
Wymagania z matematyki na poszczególne stopnie szkolne w klasie trzeciej gimnazjum I LICZBY I WYRAŻENIA ALGEBRAICZNE podawanie przykładów liczb naturalnych, całkowitych, wymiernych i niewymiernych; porównywanie
Wstęp Pierwsze kroki Pierwszy rysunek Podstawowe obiekty Współrzędne punktów Oglądanie rysunku...
 Wstęp... 5 Pierwsze kroki... 7 Pierwszy rysunek... 15 Podstawowe obiekty... 23 Współrzędne punktów... 49 Oglądanie rysunku... 69 Punkty charakterystyczne... 83 System pomocy... 95 Modyfikacje obiektów...
Wstęp... 5 Pierwsze kroki... 7 Pierwszy rysunek... 15 Podstawowe obiekty... 23 Współrzędne punktów... 49 Oglądanie rysunku... 69 Punkty charakterystyczne... 83 System pomocy... 95 Modyfikacje obiektów...
Cel: Uczeń, przy użyciu programu GeoGebra, stworzy model symetrii osiowej i pozna jej własności
 Temat: Symetria osiowa z GeoGebra Cel: Uczeń, przy użyciu programu GeoGebra, stworzy model symetrii osiowej i pozna jej własności Podstawa programowa Informatyka IV. Wykorzystanie komputera oraz programów
Temat: Symetria osiowa z GeoGebra Cel: Uczeń, przy użyciu programu GeoGebra, stworzy model symetrii osiowej i pozna jej własności Podstawa programowa Informatyka IV. Wykorzystanie komputera oraz programów
Wstęp do sieci neuronowych, wykład 12 Łańcuchy Markowa
 Wstęp do sieci neuronowych, wykład 12 Łańcuchy Markowa M. Czoków, J. Piersa 2012-01-10 1 Łańcucha Markowa 2 Istnienie Szukanie stanu stacjonarnego 3 1 Łańcucha Markowa 2 Istnienie Szukanie stanu stacjonarnego
Wstęp do sieci neuronowych, wykład 12 Łańcuchy Markowa M. Czoków, J. Piersa 2012-01-10 1 Łańcucha Markowa 2 Istnienie Szukanie stanu stacjonarnego 3 1 Łańcucha Markowa 2 Istnienie Szukanie stanu stacjonarnego
Wymagania na poszczególne oceny szkolne z. matematyki. dla uczniów klasy IIIa i IIIb. Gimnazjum im. Jana Pawła II w Mętowie. w roku szkolnym 2015/2016
 Wymagania na poszczególne oceny szkolne z matematyki dla uczniów klasy IIIa i IIIb Gimnazjum im. Jana Pawła II w Mętowie w roku szkolnym 2015/2016 DZIAŁ 1. FUNKCJE (11h) Uczeń: poda definicję funkcji (2)
Wymagania na poszczególne oceny szkolne z matematyki dla uczniów klasy IIIa i IIIb Gimnazjum im. Jana Pawła II w Mętowie w roku szkolnym 2015/2016 DZIAŁ 1. FUNKCJE (11h) Uczeń: poda definicję funkcji (2)
Dokąd on zmierza? Przemieszczenie i prędkość jako wektory
 A: 1 OK Muszę to powtórzyć... Potrzebuję pomocy Dokąd on zmierza? Przemieszczenie i prędkość jako wektory Łódź żegluje po morzu... Płynie z szybkością 10 węzłów (węzeł to 1 mila morska na godzinę czyli
A: 1 OK Muszę to powtórzyć... Potrzebuję pomocy Dokąd on zmierza? Przemieszczenie i prędkość jako wektory Łódź żegluje po morzu... Płynie z szybkością 10 węzłów (węzeł to 1 mila morska na godzinę czyli
Wymagania dla klasy szóstej Treści na 2 na 3 na 4 na 5 na 6 Uczeń: Uczeń: Uczeń: Uczeń: Uczeń: Mnożenie ułamków zwykłych
 Wymagania dla klasy szóstej Treści na 2 na 3 na 4 na 5 na 6 Uczeń: Uczeń: Uczeń: Uczeń: Uczeń: Mnożenie ułamków zwykłych Dzielenie ułamków zwykłych Liczby całkowite na osi liczbowej Dodawanie liczb całkowitych
Wymagania dla klasy szóstej Treści na 2 na 3 na 4 na 5 na 6 Uczeń: Uczeń: Uczeń: Uczeń: Uczeń: Mnożenie ułamków zwykłych Dzielenie ułamków zwykłych Liczby całkowite na osi liczbowej Dodawanie liczb całkowitych
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe
ROZKŁAD MATERIAŁU DO III KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ.
 A WYMAGANIA PODSTAWY PROGRAMOWEJ.") ROZKŁAD MATERIAŁU DO III KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Wyrażenia wymierne (19 h) Przekształcanie wielomianów Wyrażenia wymierne 4 Równania
ROZKŁAD MATERIAŁU DO III KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Wyrażenia wymierne (19 h) Przekształcanie wielomianów Wyrażenia wymierne 4 Równania
Algorytm Grovera. Kwantowe przeszukiwanie zbiorów. Robert Nowotniak
 Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej Politechnika Łódzka 13 listopada 2007 Plan wystapienia 1 Informatyka Kwantowa podstawy 2 Opis problemu (przeszukiwanie zbioru) 3 Intuicyjna
Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej Politechnika Łódzka 13 listopada 2007 Plan wystapienia 1 Informatyka Kwantowa podstawy 2 Opis problemu (przeszukiwanie zbioru) 3 Intuicyjna
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Funkcja kwadratowa. f(x) = ax 2 + bx + c = a
 = ax 2 + bx + c = a") Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax, a R \ {0}.
Funkcja kwadratowa. Funkcją kwadratową nazywamy funkcję f : R R określoną wzorem gdzie a, b, c R, a 0. f(x) = ax + bx + c, Szczególnym przypadkiem funkcji kwadratowej jest funkcja f(x) = ax, a R \ {0}.
P (A B) = P (A), P (B) = P (A), skąd P (A B) = P (A) P (B). P (A)
 = P (A), P (B) = P (A), skąd P (A B) = P (A) P (B). P (A)") Wykład 3 Niezależność zdarzeń, schemat Bernoulliego Kiedy dwa zdarzenia są niezależne? Gdy wiedza o tym, czy B zaszło, czy nie, NIE MA WPŁYWU na oszacowanie prawdopodobieństwa zdarzenia A: P (A B) = P
Wykład 3 Niezależność zdarzeń, schemat Bernoulliego Kiedy dwa zdarzenia są niezależne? Gdy wiedza o tym, czy B zaszło, czy nie, NIE MA WPŁYWU na oszacowanie prawdopodobieństwa zdarzenia A: P (A B) = P
1. Potęgi. Logarytmy. Funkcja wykładnicza
 1. Potęgi. Logarytmy. Funkcja wykładnicza Tematyka zajęć: WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KL. 3 POZIOM PODSTAWOWY Potęga o wykładniku rzeczywistym powtórzenie Funkcja wykładnicza i jej własności
1. Potęgi. Logarytmy. Funkcja wykładnicza Tematyka zajęć: WYMAGANIA EDUKACYJNE NA POSZCZEGÓLNE OCENY KL. 3 POZIOM PODSTAWOWY Potęga o wykładniku rzeczywistym powtórzenie Funkcja wykładnicza i jej własności
2. Permutacje definicja permutacji definicja liczba permutacji zbioru n-elementowego
 Wymagania dla kl. 3 Zakres podstawowy Temat lekcji Zakres treści Osiągnięcia ucznia 1. RACHUNEK PRAWDOPODOBIEŃSTWA 1. Reguła mnożenia reguła mnożenia ilustracja zbioru wyników doświadczenia za pomocą drzewa
Wymagania dla kl. 3 Zakres podstawowy Temat lekcji Zakres treści Osiągnięcia ucznia 1. RACHUNEK PRAWDOPODOBIEŃSTWA 1. Reguła mnożenia reguła mnożenia ilustracja zbioru wyników doświadczenia za pomocą drzewa
Zastosowanie metod eksploracji danych Data Mining w badaniach ekonomicznych SAS Enterprise Miner. rok akademicki 2014/2015
 Zastosowanie metod eksploracji danych Data Mining w badaniach ekonomicznych SAS Enterprise Miner rok akademicki 2014/2015 Sieci Kohonena Sieci Kohonena Sieci Kohonena zostały wprowadzone w 1982 przez fińskiego
Zastosowanie metod eksploracji danych Data Mining w badaniach ekonomicznych SAS Enterprise Miner rok akademicki 2014/2015 Sieci Kohonena Sieci Kohonena Sieci Kohonena zostały wprowadzone w 1982 przez fińskiego
Strefa pokrycia radiowego wokół stacji bazowych. Zasięg stacji bazowych Zazębianie się komórek
 Problem zapożyczania kanałów z wykorzystaniem narzędzi optymalizacji Wprowadzenie Rozwiązanie problemu przydziału częstotliwości prowadzi do stanu, w którym każdej stacji bazowej przydzielono żądaną liczbę
Problem zapożyczania kanałów z wykorzystaniem narzędzi optymalizacji Wprowadzenie Rozwiązanie problemu przydziału częstotliwości prowadzi do stanu, w którym każdej stacji bazowej przydzielono żądaną liczbę
Metody Kompilacji Wykład 3
 Metody Kompilacji Wykład 3 odbywa się poprzez dołączenie zasad(reguł) lub fragmentów kodu do produkcji w gramatyce. Włodzimierz Bielecki WI ZUT 2 Na przykład, dla produkcji expr -> expr 1 + term możemy
Metody Kompilacji Wykład 3 odbywa się poprzez dołączenie zasad(reguł) lub fragmentów kodu do produkcji w gramatyce. Włodzimierz Bielecki WI ZUT 2 Na przykład, dla produkcji expr -> expr 1 + term możemy