Metody numeryczne Wykład 6
|
|
|
- Bernard Piekarski
- 6 lat temu
- Przeglądów:
Transkrypt


1 Metody numeryczne Wykład 6 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, Zakres wykładu Interpolacja o Interpolacja wielomianowa o Wielomiany interpolacyjne: o Lagrange a o Newtona o Interpolacja trygonometryczna o Interpolujące funkcje sklejane o Szybka transformata Fouriera - FFT Aproksymacja 2 1
2 Interpolacja Wiele zjawisk które można zaobserwować jest opisana nieokreślonymi (nieznanymi) funkcjami. Możliwe jest jednak zmierzenie wartości tych funkcji, oraz ich pochodnych przy określonych wartościach argumentów. Interpolacją nazywamy procedurę prowadzącą do znalezienia wartości pewnej funkcji f(x) w dowolnym punkcie przedziału (x 0, x n ) na podstawie znanych wartości tej funkcji w punktach x 0, x 1,..., x n, zwanych węzłami interpolacji. Postępowanie prowadzące do znalezienia wartości funkcji f(x) w punkcie leżącym poza przedziałem (x 0, x n ) nazywamy ekstrapolacją. 3 Interpolacje Interpolację lub ekstrapolację stosuje się gdy: o Funkcja f(x) nie jest znana, a posiadane są tylko informacje o jej wartościach w punktach przedziału o Obliczanie wartości funkcji F(x) jest skomplikowane (czasochłonne), wygodniej jest interpolować prostszą obliczeniowo funkcją f(x) zwracającą w zadanych punktach takie same wartości jak funkcja F(x) 4 2
3 Interpolacja 5 Interpolacja Funkcji interpolującej, ekstrapolującej poszukuje się zazwyczaj w pewnej określonej postaci: o Wielomianowa o Algebraiczna o Trygonometryczna o Funkcjami sklejanymi 6 3
=y i gdzie: W(x)=a 0 +a 1 x+a 2 x 2 +a 3 x 3 + +a n x n 7 Interpolacja wielomianowa Dla n węzłów interpolacyjnych można więc zapisać równanie macierzowe opisujące warunki jakie musi")
4 Interpolacja wielomianowa Interpolacja wielomianowa opiera się na wielomianie stopnia co najmniej n, gdzie n jest liczbą węzłów (punktów) interpolacji. W(x i )=y i gdzie: W(x)=a 0 +a 1 x+a 2 x 2 +a 3 x 3 + +a n x n 7 Interpolacja wielomianowa Dla n węzłów interpolacyjnych można więc zapisać równanie macierzowe opisujące warunki jakie musi spełnić wielomian interpolacyjny: Xa=y 8 4
5 Interpolacja wielomianowa o Poszukiwane wartości współczynników można policzyć z zależności a=x -1 y o Wyznaczenie współczynników można także zrealizować rozwiązując układ równań liniowych, funkcja linsolve(x,-y) o Warunkiem uzyskania jednego rozwiązania jest detx 0 9 Interpolacja przykład 1 4,00 3,50 3,00 2,50 2,00 1,50 1,00 0,50 I [A] U [V] ,00 0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,
6 Interpolacja przykład 1 11 Interpolacja przykład 1 4,00 3,50 3,00 2,50 2,00 1,50 1,00 0,50 0,00 0,00 0,20 0,40 0,60 0,80 1,

")
7 Interpolacja Lagrang a Interpolacja wielomianem Lagrang a jest odmianą interpolacji wielomianowej w której nieznaną funkcję interpoluje się do wielomianu iteracyjnym w postaci: 13 Interpolacja Lagrang a Rozwijając wielomian L(x) otrzymujemy: 14 7
![Lagrang przykład 2 4,00 3,50 3,00 2,50 2,00 1,50 1,00 0,50 I [A] 0.1 0.7 0.8 1 1.1 1.25 1.](/docs-images/98/138865718/images/8-0.jpg "5 2 U [V] 2 3 3.5 6 9 11 12 12.")
8 Lagrang przykład 2 4,00 3,50 3,00 2,50 2,00 1,50 1,00 0,50 I [A] U [V] ,00 0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 0,90 15 Lagrang przykład
9 Lagrang przykład 2 17 Lagrang przykład
10 Lagrang przykład 2 I U 0,10 2,00 0,20 2,10 0,30 2,30 0,40 2,35 0,50 2,39 0,60 2,60 0,70 3,00 0,80 3,50 0,90 4,00 1,00 6,00 1,10 9,00 1,20 10,50 1,25 11,00 1,30 11,50 1,40 11,90 1,50 12,00 1,60 12,10 1,70 12,20 1,80 12,30 1,90 12,40 2,00 12,50 19 Lagrang przykład 2 I U 0,10 2,00 0,20 2,10 0,30 2,30 0,40 2,35 0,50 2,39 0,60 2,60 0,70 3,00 0,80 3,50 0,90 4,00 1,00 6,00 1,10 9,00 1,20 10,50 1,25 11,00 1,30 11,50 1,40 11,90 1,50 12,00 1,60 12,10 1,70 12,20 1,80 12,30 1,90 12,40 2,00 12,



11 Interpolacja Newtona Ilorazów różnicowych Metoda Newtona opiera się na wykorzystaniu wyrażeń zwanych ilorazami różnicowymi. Wyrazy te określa się dla n-1 rzędów gdzie n jest liczbą punktów pomiarowych (węzłów interpolacyjnych). Na podstawie wyznaczonych ilorazów różnicowych tworzy się zazwyczaj tablicę. 21 Interpolacja Newtona 22 11


12 Interpolacja Newtona Wzór ogólny iteracyjny na iloraz różnicowy można zapisać w postaci: 23 Interpolacja Newtona Wzór interpolacyjny Newtona z różnicami ilorazowymi przyjmuje postać: 24 12

13 Interpolacja Newtona Na podstawie zapisanego równania iteracyjnego wielomianu można zapisać algorytm komputerowy dla interpolacji Newtona. 25 Newtona przykład 3 x y I II III IV V VI VII
14 Newtona przykład 3 27 Newtona przykład

15 Newtona przykład 3 29 Newtona przykład
16 Newtona przykład 3 31 Interpolacja sygnał okresowy 150,00 100,00 50,00 0, ,00-100,00-150,00-200,
17 Interpolacja Lagrang a sygnał okresowy 33 Interpolacja Newtona sygnał okresowy 34 17

18 Interpolacja trygonometryczna o Interpolacje algebraiczne wielomianowe z racji swoich właściwości nie bardzo nadają się do opisu sygnałów okresowych o Interpolację trygonometryczną stosuje się do wyznaczania funkcji interpolującej dla funkcji okresowych (np. sinusoidalnych) o Dobrze nadaje się do interpolacji sygnałów elektrycznych czy drgań mechanicznych 35 Interpolacja trygonometryczna Dana jest funkcja okresowa f o okresie 2p, zmiennej rzeczywistej o wartościach zespolonych: f(x+2p)=f(x) Dowolną funkcję okresową o okresie t można poprzez podstawienie sprowadzić do funkcji okresowej 2p Można więc przy takim uogólnieniu rozpatrywać tylko funkcje o okresie 2p

19 Interpolacja trygonometryczna Interpolacja trygonometryczna sprowadza się do określenia dla nieznanej funkcji f wielomianu trygonometrycznego F przyjmującej dla danych węzłów interpolacyjnych te same wartości. 37 Interpolacja trygonometryczna o Warunki interpolacyjne można zapisać w postaci n+1 równań niewiadomych c0, c1,,cn o Macierz tego układu jest nieosobliwą macierzą Vandermode a, układ ma jedno rozwiązanie. o Wyznacznik macierzy jest różny od 0, przy założeniu że węzły xk są niepowtarzalne



20 Interpolacja trygonometryczna Jako kryterium upraszczające do dalszych rozważań przyjmuje się że węzły interpolujące są równoodległe. 39 Interpolacja trygonometryczna Funkcje e jmx, m=0,1,2,,n tworzą układ ortogonalny, dla iloczynu skalarnego: stąd 40 20


21 Interpolacja trygonometryczna o Współczynniki wielomianu trygonometrycznego cm są równe: o Współczynniki cm są równe współczynnikom rozwinięcia Fouriera funkcji f. o Wyznaczanie współczynników wielomianu trygonometrycznego funkcji f określa się mianem dyskretnej transformaty Fouriera. 41 Interpolacja trygonometryczna Trygonometryczny wielomian interpolacyjny funkcji f oparty na węzłach interpolacyjnych można przedstawić w postaci: 42 21

22 Interpolacja trygonometryczna Współczynniki wielomianu wyznaczane są z zależności: 43 Przykład 4 Określić algorytm interpolacyjny funkcji f dla podanych węzłów interpolacyjnych
23 Przykład 4 n=31 nieparzyste, więc m=(n-1)/2=15 i δ=1 Na podstawie zależności: kolejne węzły interpolacyjne. wyznaczane są 45 Przykład 4 Na podstawie wyznaczonego wielomianu trygonometrycznego wyznaczane są interpolowane wartości funkcji
24 Przykład 4 47 Przykład

25 Przykład 4 Na podstawie danych wejściowych wyznaczono współczynniki wielomianu: Wielomian interpolacji trygonometrycznej przyjmuje postać: 49 Przykład

26 Przykład 5 Wyznaczyć wielomian interpolacji trygonometrycznej zadanego sygnału: 51 Przykład 4 Na podstawie danych wejściowych wyznaczono współczynniki wielomianu: Wielomian interpolacji trygonometrycznej przyjmuje postać: 52 26
27 Przykład 5 53 Przykład 5 Wyznaczyć interpolacyjny wielomian trygonometryczny dla sygnału 54 27
28 Przykład 5 Na podstawie danych wejściowych wyznaczono współczynniki wielomianu. Wielomian interpolacji trygonometrycznej przyjmuje postać: 55 Przykład
29 Interpolacje o Interpolacje wielomianowe algebraiczne cechują się pogorszeniem jakości, szczególnie na końcach przedziału interpolacji. o Zjawisko nasila się wraz ze wzrostem stopnia wielomianu, a więc liczby węzłów interpolacji. o Zjawisko to nazywa się Oscylacjami Rungego Interpolujące funkcje sklejane o Problemy związane z interpolacjami wielomianowymi (oscylacje Rungego) powodują że wygodniejsze może być interpolowanie za pomocą funkcji sklejanych o Funkcją sklejaną (splajnem ang. spline) nazywamy funkcję która: o lokalnie jest wielomianem rzędu k o jest (k 1)-krotnie różniczkowalna w węzłach (z czego wynika że jej pochodne rzędu k 2 i niższych są ciągłe). o Najczęściej stosuje się funkcje sklejane 3 stopnia (funkcje kubiczne) 58 29
30 Interpolujące funkcje sklejane Funkcja sklejane stopnia Interpolujące funkcje sklejane Funkcja sklejane stopnia
31 Interpolujące funkcje sklejane o Interpolację funkcjami sklejanymi 3 stopnia można przeprowadzić dwoma sposobami: o Analizowany sygnał dzieli się na tyle podzbiorów, aby każdy z nich składał się z trzech węzłów interpolacyjnych o Określenie równania wielomianu 3 stopnia jest więc zagadnieniem łatwym o Metoda ta sprawia że mogą pojawić się na krańcach przedziałów kanty 61 Interpolujące funkcje sklejane Zakładając, że znane są nie tylko wartości funkcji w węzłach interpolacyjnych, ale również wartości drugiej pochodnej w tych punktach można wyznaczyć interpolacje funkcją sklejaną 3 stopnia bez efektu kantów. Do dalszych rozważań przyjmujemy: xi fi=f(xi) fi =f (xi) x1 f1 f1 x2 f2 f2 x3 f3 f3 xn fn fn 62 31
![Interpolujące funkcje sklejane Dla każdego przedziału interpolacyjnego zdefiniowanego przez [xi;xi+1] dla i=1,2,,n-1](/docs-images/98/138865718/images/32-0.jpg "zapisujemy wielomian trzeciego stopnia: yi(x)=afi+bfi+1+cf i+df i+1 gdzie: 63 Interpolujące funkcje sklejane o Druga")

32 Interpolujące funkcje sklejane Dla każdego przedziału interpolacyjnego zdefiniowanego przez [xi;xi+1] dla i=1,2,,n-1 zapisujemy wielomian trzeciego stopnia: yi(x)=afi+bfi+1+cf i+df i+1 gdzie: 63 Interpolujące funkcje sklejane o Druga pochodna funkcji jest jednak nieznana. o Problem można rozwiązać zakładając ciągłość pierwszej pochodnej w węzłach o Przyjmuje się, że pochodna lewym krańcu przedziału yi(x) jest równa pochodnej obliczanej dla prawego krańca przedziału yi+1(x) 64 32

33 Interpolujące funkcje sklejane o W efekcie dany jest układ równań liniowych z niewiadomymi {fi }. o Problem stanowi to, że dla n węzłów interpolacji, danych jest n-2 węzłów wewnętrznych i w efekcie można zapisać n-2 równań dla n niewiadomych o Konieczne jest więc przyjęcie dodatkowych dwóch warunków o Najczęściej zakłada się, że f1 =f2 =0, ale można narzucić inne warunki brzegowe 65 Interpolujące funkcje sklejane Przy założeniu, że odstępy pomiędzy węzłami interpolacyjnymi są równe xi+1-xi=h można zapisać równanie w postaci 66 33
34 Interpolujące funkcje sklejane Algorytm zastosowania interpolacji funkcjami sklejanymi 3 stopnia składa się z dwóch etapów 1. Rozwiązania układu równań w celu wyznaczenia nieznanych wartości drugich pochodnych sygnału w przedziale i=[2;n-1] 2. Korzystając z rodziny wielomianów yi(x) określonych dla każdego przedziału [x i ;x i+1 ], w zadanym przedziale można wyznaczyć dowolną liczbę punktów interpolujących 67 Interpolujące funkcje sklejane 68 34
35 Interpolujące funkcje sklejane 69 Interpolujące funkcje sklejane 70 35
=afi+bfi+1+cf i+df i+1 71")
36 Interpolujące funkcje sklejane yi(x)=afi+bfi+1+cf i+df i+1 71 Przykład
37 Przykład 7 73 Przykład

38 Szybka transformato Fouriera o Przekształcenie Fouriera (transformacja) pozwala na rozkład analizowanego sygnału na częstotliwości składowe. o Algorytm szybkiej transformaty Fouriera FFT służy do efektywnego wyznaczania współczynnika c m dla interpolacji trygonometrycznej 75 Szybka transformata Fouriera Dekompozycja sygnału na składowe w postaci szeregu sygnałów sinusoidalnych umożliwia interpolację sygnału w postaci szeregu trygonometrycznego poprzez identyfikację parametrów tych sygnałów: o częstotliwości, o amplitudy, o fazy. FFT znajduje szerokie zastosowanie w wielu dziedzinach: przetwarzaniu sygnałów cyfrowych, obrazowaniu medycznym, rozwiązywaniu równań różniczkowych, poszukiwaniu złóż ropy i gazu, Monitorowaniu pracy maszyn, sterowaniu samolotów i statków kosmicznych
39 Szybka transformata Fouriera o Funkcja FFT jest dostępna w większości programów obliczeniowych. o W środowisku Scilaba szybką transformatę Fouriera można przeprowadzać dla wektora lub macierzy danych. o Podstawowa składnia funkcji fft wymaga podania jedynie na wejście analizowanego sygnału, na wyjściu otrzymujemy odpowiednio wektor lub macierz wartości zespolonych X=fft(A); 77 Przykład 8 - FFT o Przeprowadzić analizę sygnału, określić parametry interpolacyjnego wielomianu trygonometrycznego (amplitudę, częstotliwość i fazę). o Dla potrzeb przykładu analizowany przykład zawiera losowo generowany szum odpowiadająco błędom pomiarowym 78 39
40 Przykład 8 - FFT Dane wejściowe dla przykładu 79 Przykład 8 - FFT 80 40
41 Przykład 8 - FFT o Poprawna analiza wymaga posiadania informacji o liczbie okresów analizowanego sygnału w próbce wejściowej o Im większa częstotliwość próbkowania tym dokładniejsze wyniki obliczeń, ostrzejsze piki o Liczba okresów powinna być liczbą całkowitą o Im więcej okresów lub próbek tym amplituda większa o Zwracany wektor fft ma symetryczną budowę względem środka zakresu 81 Przykład 8 - FFT 1.5 okresu, 100 próbek 3 okresy, 100 próbek 1 okres, 300 próbek 82 41
42 Przykład 8 - FFT o Każda wartość zwracana przez funkcję fft jest w postaci liczby zespolonej, niosącej informacje o amplitudzie i fazie analizowanego sygnału o Każda wartość jest powiązana z inną częstotliwością składowej sygnału wejściowego o Informacja o częstotliwości próbkowania pozwala na wygenerowanie wektora częstotliwości o Dodatkowo konieczna jest informacja o liczbie próbek 83 Przykład 8 FFT o Konieczna jest identyfikacja ekstremów które odpowiadają poszukiwanym składowym wielomianu interpolacyjnego o Ze względu na symetrie ograniczyć się można do połowy wartości wektora zwróconego przez FFT o Odfiltrowanie szumu można zrealizować poprzez wyszukanie wartości wektora FFT większych od średniej 84 42
43 Przykład 8 - FFT o Amplituda składowych wielomianu uzyskana z funkcji FFT jest wielokrotnością iloczynu liczby próbek i okresów sygnału i liczby ekstremów związanych z częstotliwością składowej o Częstotliwości określa poprzez iloraz częstotliwości próbkowania i iloczynu liczby próbek i okresów o Kąty fazowe poszczególnych składowych wielomianu wyznacza się jako argument z liczby zespolonej uzyskanej z funkcji FFT dla każdej z wyznaczonych częstotliwości 85 Przykład 8 FFT Jeden okres, 100 próbek 86 43
44 Przykład 8 FFT 87 Przykład 8 - FFT 88 44
45 Przykład 9 -FFT 1.5 okresu, 100 próbek 89 Przykład 9 FFT 90 45

46 Przykład 9 FFT 91 Przykład 10 - FFT o Zwiększenie częstotliwości próbkowania przy całkowitej liczbie okresów sygnału badanego w próbce wpływa nieznacznie na poprawę dokładności interpolacji o Zbyt duża liczba próbek może doprowadzić do bledów obliczeniowych o Jeżeli liczba okresów nie jest całkowita, zwiększenie liczby próbek drastycznie zwiększa liczbę wyznaczonych składowych wielomianu interpolującego, nie poprawiając jednocześnie dokładności interpolacji 92 46
47 Aproksymacja o Aproksymacja polega na wyznaczeniu, możliwie niskim kosztem, funkcji F przybliżającej zadaną funkcję f z żądaną dokładnością o W odróżnieniu od interpolacji funkcja aproksymująca nie musi przechodzić przez zadane punkty funkcji aproksymowanej. o Funkcja aproksymująca f(x) ma przybliżać funkcję aproksymowaną F(x) z żądaną dokładnością. 93 Aproksymacja Interpolacja Aproksymacja 94 47
48 Aproksymacja Aproksymacja funkcji f(x) polega na wyznaczeniu współczynników wielomianu F(x) przy warunku osiągnięcia minimalnej wartości: ϕ 0,ϕ 1,, ϕ n są funkcjami bazowymi, których właściwy dobór ma decydujące znaczenie dla prawidłowości i efektywności przeprowadzenia aproksymacji 95 Aproksymacja Zadanie aproksymacyjne przy wybranych funkcjach bazowych ϕ k (x) sprowadza się do wyznaczenia współczynników a k, zapewniających osiągnięcie minimum normy: Najczęściej stosowane normy to: 1. Norma jednostajna (Czebyszewa) 2. Normą średniokwadratową 3. Normą L 2 Wybór normy determinuje rodzaj aproksymacji 96 48
49 Aproksymacja Funkcje bazowe ϕ(x) wybierane są zazwyczaj z podprzestrzenie: a) Funkcji trygonometrycznych z bazą: 1,sin(x),cos(x),sin(2x),cos(2x),,sin(nx),cos(nx) Dla sygnałów okresowych b) Wielomianów co najwyżej stopnia n: 1,x,x 2,x 3,,x n Pomimo prostoty działań na wielomianach cechuje się dużymi błędami przy działaniach na małych lub niewiele różniących się liczbach c) Wielomianów Czebyszewa d) Wielomianów Legendre a 97 Aproksymacja o Na podstawie analizy danych pomiarowych można określić charakter kształt funkcji wiążącej punkty pomiarowe. o Aproksymacja średniokwadratowa znacznie lepiej eliminuje błędy pomiarowe od aproksymacji jednostajnej 20 X y y=a 1 x+a ,2 0,4 0,

50 Aproksymacja o Zadanie sprowadza się do określenia współczynników a 0 i a 1 takich aby spełnione było najmniejsze maksimum między F(x) i f(x). o Aproksymacji średniokwadratowej 99 Aproksymacja o Określenie wartości współczynników a 0 i a 1 spełniających warunek osiągnięcia minimum funkcji sprowadza się do rozwiązania równania dla zerowania pochodnych równania. o Zakładając aproksymację liniową opisaną równaniem y=a 1 x+a 0 mówi się o regresji liniowej


51 Aproksymacja Poszukując minimum funkcji należy rozwiązać układ równań 101 Aproksymacja Przekształcając wzory można równanie zapisać w postaci:


52 Aproksymacja W zapisie macierzowym układ równań przyjmuje postać: 103 Aproksymacja Ogólną postać dla wielomianu rzędu k można zapisać w postaci równania macierzowego:
53 Przykład 11 Dla zadanych sygnałów pomiarowych przeprowadzić aproksymację wielomianową: t x y z 0-2 0,00-1, ,00 2, ,00 3, ,00 9, ,00 12, ,00 10, ,50 9, ,20 9, ,20 8, ,50 9, ,00 8, x y z Przykład 11 o Każde zadanie aproksymacyjne rozwiązywane niezależnie. o Przy aproksymacji nieliniowej dobierana jest potęga wykłądnika
54 Przykład 11 Wyznaczanie współczynników wielomianu aproksymacyjnego 107 Przykład 11 t x a 1 = a 0 =-2.5 x= t
55 Przykład 11 t y 0,00 7,00 11,00 15,00 14,00 16,00 14,50 16,20 14,20 16,50 15,00 a0=0.358 a1=7.405 a2= a3=0.056 y=0.056t t t Przykład 11 t z -1,00 2,50 3,00 9,00 12,00 10,00 9,00 9,30 8,60 9,00 8,50 Trzeciego rzędu Czwartego rzędu z3=0.031t3-0.73t2+5.22t-1.84 z4=0.014t4-0.27t3+1.28t2+0.68t



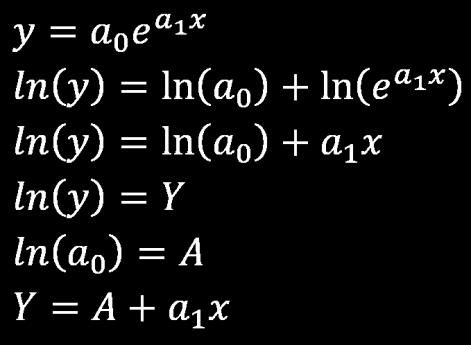
56 Aproksymacja Dane pomiarowe aproksymuje się do funkcji najbardziej zbliżonej kształtem: 111 Aproksymacja W wielu przypadkach można problem nieliniowy sprowadzić do zadania liniowego, stosując odpowiednie podstawienia i przekształcenia

57 Aproksymacja
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Interpolacja. Marcin Orchel. Drugi przypadek szczególny to interpolacja trygonometryczna
 Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 8 Interpolacja Interpolacja polega na budowaniu tzw. funkcji interpolujących ϕ(x) na podstawie zadanych
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 8 Interpolacja Interpolacja polega na budowaniu tzw. funkcji interpolujących ϕ(x) na podstawie zadanych
3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która
![3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która](/thumbs/98/137435342.jpg "3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która") 3. Interpolacja Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która przyjmuje wartości y 1, y 2,, y n, dla skończonego zbioru argumentów x 1, x
3. Interpolacja Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która przyjmuje wartości y 1, y 2,, y n, dla skończonego zbioru argumentów x 1, x
Aproksymacja. funkcji: ,a 2. ,...,a m. - są funkcjami bazowymi m+1 wymiarowej podprzestrzeni liniowej X m+1
 Założenie: f(x) funkcja którą aproksymujemy X jest przestrzenią liniową Aproksymacja liniowa funkcji f(x) polega na wyznaczeniu współczynników a 0,a 1,a 2,...,a m funkcji: Gdzie: - są funkcjami bazowymi
Założenie: f(x) funkcja którą aproksymujemy X jest przestrzenią liniową Aproksymacja liniowa funkcji f(x) polega na wyznaczeniu współczynników a 0,a 1,a 2,...,a m funkcji: Gdzie: - są funkcjami bazowymi
INFORMATYKA ELEMENTY METOD NUMERYCZNYCH.
 INFORMATYKA ELEMENTY METOD NUMERYCZNYCH http://www.infoceram.agh.edu.pl METODY NUMERYCZNE Metody numeryczne zbiór metod rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
INFORMATYKA ELEMENTY METOD NUMERYCZNYCH http://www.infoceram.agh.edu.pl METODY NUMERYCZNE Metody numeryczne zbiór metod rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
METODY NUMERYCZNE. Wykład 3. Plan. Aproksymacja Interpolacja wielomianowa Przykłady. dr hab.inż. Katarzyna Zakrzewska, prof.agh. Met.Numer.
 METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
Metody numeryczne. Sformułowanie zagadnienia interpolacji
 Wykład nr 2 Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n (nazywane węzłami interpolacji) i wartości w węzłach y 0,..., y n. Od węzłów żądamy spełnienia warunku x i x j dla
Wykład nr 2 Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n (nazywane węzłami interpolacji) i wartości w węzłach y 0,..., y n. Od węzłów żądamy spełnienia warunku x i x j dla
Interpolacja, aproksymacja całkowanie. Interpolacja Krzywa przechodzi przez punkty kontrolne
 Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
DOPASOWYWANIE KRZYWYCH
 DOPASOWYWANIE KRZYWYCH Maciej Patan Uniwersytet Zielonogórski Motywacje Przykład 1. Dane o przyroście światowej populacji są aktualizowane co każde 10 lat, celem szacowania średniego przyrostu rocznego.
DOPASOWYWANIE KRZYWYCH Maciej Patan Uniwersytet Zielonogórski Motywacje Przykład 1. Dane o przyroście światowej populacji są aktualizowane co każde 10 lat, celem szacowania średniego przyrostu rocznego.
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 26 czerwca 2017 roku
 Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Egzamin z Metod Numerycznych ZSI, Egzamin, Gr. A
 Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Analiza numeryczna Kurs INP002009W. Wykład 8 Interpolacja wielomianowa. Karol Tarnowski A-1 p.223
 Analiza numeryczna Kurs INP002009W Wykład 8 Interpolacja wielomianowa Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Wielomian interpolujący Wzór interpolacyjny Newtona Wzór interpolacyjny
Analiza numeryczna Kurs INP002009W Wykład 8 Interpolacja wielomianowa Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Wielomian interpolujący Wzór interpolacyjny Newtona Wzór interpolacyjny
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Technologie informatyczne
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Interpolacja metoda funkcji sklejanych Materiały pomocnicze do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Interpolacja metoda funkcji sklejanych Materiały pomocnicze do ćwiczeń laboratoryjnych
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 24 czerwca 2019 roku
 Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Obliczenia Naukowe. Wykład 12: Zagadnienia na egzamin. Bartek Wilczyński
 Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Metody numeryczne Wykład 7
 Metody numeryczne Wykład 7 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Plan wykładu Rozwiązywanie równań algebraicznych
Metody numeryczne Wykład 7 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Plan wykładu Rozwiązywanie równań algebraicznych
Metody numeryczne. Sformułowanie zagadnienia interpolacji
 Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
Interpolacja funkcji
 Interpolacja funkcji Interpolacja funkcji Interpolacja funkcji Wielomianowa Splajny Lagrange a Trygonometryczna Interpolacja Newtona (wzór I ) Czebyszewa Newtona (wzór II ) ( Wielomiany Czebyszewa ) Załóżmy,
Interpolacja funkcji Interpolacja funkcji Interpolacja funkcji Wielomianowa Splajny Lagrange a Trygonometryczna Interpolacja Newtona (wzór I ) Czebyszewa Newtona (wzór II ) ( Wielomiany Czebyszewa ) Załóżmy,
Egzamin z Metod Numerycznych ZSI, Grupa: A
 Egzamin z Metod Numerycznych ZSI, 06.2005. Grupa: A Nazwisko: Imię: Numer indeksu: Ćwiczenia z: Data: Część 1. Test wyboru, max 36 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa
Egzamin z Metod Numerycznych ZSI, 06.2005. Grupa: A Nazwisko: Imię: Numer indeksu: Ćwiczenia z: Data: Część 1. Test wyboru, max 36 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa
w analizie wyników badań eksperymentalnych, w problemach modelowania zjawisk fizycznych, w analizie obserwacji statystycznych.
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Rozwiązywanie równań nieliniowych
 Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
Rozwiązywanie równań nieliniowych Marcin Orchel 1 Wstęp Przykłady wyznaczania miejsc zerowych funkcji f : f(ξ) = 0. Wyszukiwanie miejsc zerowych wielomianu n-tego stopnia. Wymiar tej przestrzeni wektorowej
Metody numeryczne Wykład 4
 Metody numeryczne Wykład 4 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Metody skończone rozwiązywania
Metody numeryczne Wykład 4 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Metody skończone rozwiązywania
Szybka transformacja Fouriera (FFT Fast Fourier Transform)
") Szybka transformacja Fouriera (FFT Fast Fourier Transform) Plan wykładu: 1. Transformacja Fouriera, iloczyn skalarny 2. DFT - dyskretna transformacja Fouriera 3. FFT szybka transformacja Fouriera a) algorytm
Szybka transformacja Fouriera (FFT Fast Fourier Transform) Plan wykładu: 1. Transformacja Fouriera, iloczyn skalarny 2. DFT - dyskretna transformacja Fouriera 3. FFT szybka transformacja Fouriera a) algorytm
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
Ćwiczenie 3. Właściwości przekształcenia Fouriera
 Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
Politechnika Wrocławska Wydział Elektroniki Mikrosystemów i Fotoniki Przetwarzanie sygnałów laboratorium ETD5067L Ćwiczenie 3. Właściwości przekształcenia Fouriera 1. Podstawowe właściwości przekształcenia
7. Szybka transformata Fouriera fft
 7. Szybka transformata Fouriera fft Dane pomiarowe sygnałów napięciowych i prądowych często obarczone są dużym błędem, wynikającym z istnienia tak zwanego szumu. Jedną z metod wspomagających analizę sygnałów
7. Szybka transformata Fouriera fft Dane pomiarowe sygnałów napięciowych i prądowych często obarczone są dużym błędem, wynikającym z istnienia tak zwanego szumu. Jedną z metod wspomagających analizę sygnałów
ROZWIĄZYWANIE RÓWNAŃ NIELINIOWYCH
 Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
x y
 Przykłady pytań na egzamin końcowy: (Uwaga! Skreślone pytania nie obowiązują w tym roku.). Oblicz wartość interpolacji funkcjami sklejanymi (przypadek (case) a), dla danych i =[- 4 5], y i =[0 4 -]. Jaka
Przykłady pytań na egzamin końcowy: (Uwaga! Skreślone pytania nie obowiązują w tym roku.). Oblicz wartość interpolacji funkcjami sklejanymi (przypadek (case) a), dla danych i =[- 4 5], y i =[0 4 -]. Jaka
Interpolacja i modelowanie krzywych 2D i 3D
 Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
Metody Obliczeniowe w Nauce i Technice
 5. Aproksymacja Marian Bubak Department of Computer Science AGH University of Science and Technology Krakow, Poland bubak@agh.edu.pl dice.cyfronet.pl Contributors Paweł Urban Jakub Ptak Łukasz Janeczko
5. Aproksymacja Marian Bubak Department of Computer Science AGH University of Science and Technology Krakow, Poland bubak@agh.edu.pl dice.cyfronet.pl Contributors Paweł Urban Jakub Ptak Łukasz Janeczko
Wstęp do metod numerycznych Interpolacja. P. F. Góra
 Wstęp do metod numerycznych Interpolacja P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2010 Interpolacja Dana jest funkcja w postaci stabelaryzowanej x i x 1 x 2 x 3... x n f i = f(x i ) f 1 f 2 f 3...
Wstęp do metod numerycznych Interpolacja P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2010 Interpolacja Dana jest funkcja w postaci stabelaryzowanej x i x 1 x 2 x 3... x n f i = f(x i ) f 1 f 2 f 3...
Metody numeryczne. Ilorazy różnicowe. dr Artur Woike. Wzory interpolacyjne Newtona i metoda Aitkena.
 Ćwiczenia nr 3. Ilorazy różnicowe Niech będą dane punkty x 0,..., x n i wartości f (x 0 ),..., f (x n ). Definiujemy rekurencyjnie ilorazy różnicowe: f (x i, x i+1 ) = f (x i+1) f (x i ) x i+1 x i, i =
Ćwiczenia nr 3. Ilorazy różnicowe Niech będą dane punkty x 0,..., x n i wartości f (x 0 ),..., f (x n ). Definiujemy rekurencyjnie ilorazy różnicowe: f (x i, x i+1 ) = f (x i+1) f (x i ) x i+1 x i, i =
CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera)
") I. Wprowadzenie do ćwiczenia CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera) Ogólnie termin przetwarzanie sygnałów odnosi się do nauki analizowania zmiennych w czasie procesów fizycznych.
I. Wprowadzenie do ćwiczenia CYFROWE PRZTWARZANIE SYGNAŁÓW (Zastosowanie transformacji Fouriera) Ogólnie termin przetwarzanie sygnałów odnosi się do nauki analizowania zmiennych w czasie procesów fizycznych.
Met Me ody numer yczne Wykład ykład Dr inż. Mic hał ha Łanc Łan zon Instyt Ins ut Elektr Elektr echn iki echn i Elektrot Elektr echn olo echn
 Metody numeryczne Wykład 3 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Pojęcia podstawowe Algebra
Metody numeryczne Wykład 3 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Pojęcia podstawowe Algebra
Całkowanie numeryczne
 Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Całkowanie numeryczne Poniżej omówione zostanie kilka metod przybliżania operacji całkowania i różniczkowania w szczególności uzależnieniu pochodnej od jej różnic skończonych gdy równanie różniczkowe mamy
Całkowanie numeryczne przy użyciu kwadratur
 Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
1 Równania nieliniowe
 1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
1 Równania nieliniowe 1.1 Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym jest numeryczne poszukiwanie rozwiązań równań nieliniowych, np. algebraicznych (wielomiany),
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu
 1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
Wprowadzenie Metoda bisekcji Metoda regula falsi Metoda siecznych Metoda stycznych RÓWNANIA NIELINIOWE
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Zazwyczaj nie można znaleźć
Bardzo łatwa lista powtórkowa
 Analiza numeryczna, II rok inf., WPPT- 12 stycznia 2008 Terminy egzaminów Przypominam, że egzaminy odbędą się w następujących terminach: egzamin podstawowy: 30 stycznia, godz. 13 15, C-13/1.31 egzamin
Analiza numeryczna, II rok inf., WPPT- 12 stycznia 2008 Terminy egzaminów Przypominam, że egzaminy odbędą się w następujących terminach: egzamin podstawowy: 30 stycznia, godz. 13 15, C-13/1.31 egzamin
Z52: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania, zagadnienie brzegowe.
 Z5: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania zagadnienie brzegowe Dyskretne operatory różniczkowania Numeryczne obliczanie pochodnych oraz rozwiązywanie
Z5: Algebra liniowa Zagadnienie: Zastosowania algebry liniowej Zadanie: Operatory różniczkowania zagadnienie brzegowe Dyskretne operatory różniczkowania Numeryczne obliczanie pochodnych oraz rozwiązywanie
Interpolacja. Interpolacja wykorzystująca wielomian Newtona
 Interpolacja Funkcja y = f(x) jest dana w postaci dyskretnej: (1) y 1 = f(x 1 ), y 2 = f(x 2 ), y 3 = f(x 3 ), y n = f(x n ), y n +1 = f(x n +1 ), to znaczy, że w pewny przedziale x 1 ; x 2 Ú ziennej niezależnej
Interpolacja Funkcja y = f(x) jest dana w postaci dyskretnej: (1) y 1 = f(x 1 ), y 2 = f(x 2 ), y 3 = f(x 3 ), y n = f(x n ), y n +1 = f(x n +1 ), to znaczy, że w pewny przedziale x 1 ; x 2 Ú ziennej niezależnej
9. Dyskretna transformata Fouriera algorytm FFT
 Transformata Fouriera ma szerokie zastosowanie w analizie i syntezie układów i systemów elektronicznych, gdyż pozwala na połączenie dwóch sposobów przedstawiania sygnałów reprezentacji w dziedzinie czasu
Transformata Fouriera ma szerokie zastosowanie w analizie i syntezie układów i systemów elektronicznych, gdyż pozwala na połączenie dwóch sposobów przedstawiania sygnałów reprezentacji w dziedzinie czasu
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona) f(x) = 0, gdzie. dla n=2 np.
 f(x) = 0, gdzie. dla n=2 np.") Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ
 ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
Równania liniowe i nieliniowe
 ( ) Lech Sławik Podstawy Maximy 11 Równania.wxmx 1 / 8 Równania liniowe i nieliniowe 1 Symboliczne rozwiązanie równania z jedną niewiadomą 1.1 solve -- Funkcja: solve() MENU: "Równania->Rozwiąż..."
( ) Lech Sławik Podstawy Maximy 11 Równania.wxmx 1 / 8 Równania liniowe i nieliniowe 1 Symboliczne rozwiązanie równania z jedną niewiadomą 1.1 solve -- Funkcja: solve() MENU: "Równania->Rozwiąż..."
Zał nr 4 do ZW. Dla grupy kursów zaznaczyć kurs końcowy. Liczba punktów ECTS charakterze praktycznym (P)
") Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Transformata Fouriera
 Transformata Fouriera Program wykładu 1. Wprowadzenie teoretyczne 2. Algorytm FFT 3. Zastosowanie analizy Fouriera 4. Przykłady programów Wprowadzenie teoretyczne Zespolona transformata Fouriera Jeżeli
Transformata Fouriera Program wykładu 1. Wprowadzenie teoretyczne 2. Algorytm FFT 3. Zastosowanie analizy Fouriera 4. Przykłady programów Wprowadzenie teoretyczne Zespolona transformata Fouriera Jeżeli
Obliczenia naukowe Wykład nr 6
 Obliczenia naukowe Wykład nr 6 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [1] D. Kincaid, W. Cheney, Analiza
Obliczenia naukowe Wykład nr 6 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [1] D. Kincaid, W. Cheney, Analiza
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
PODSTAWY AUTOMATYKI. MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Zaawansowane metody numeryczne
 Wykład 6 Własności wielomianów ortogonalnych Wszystkie znane rodziny wielomianów ortogonalnych dzielą pewne wspólne cechy: 1) definicja za pomocą wzoru różniczkowego, jawnej sumy lub funkcji tworzącej;
Wykład 6 Własności wielomianów ortogonalnych Wszystkie znane rodziny wielomianów ortogonalnych dzielą pewne wspólne cechy: 1) definicja za pomocą wzoru różniczkowego, jawnej sumy lub funkcji tworzącej;
Metody Numeryczne Wykład 4 Wykład 5. Interpolacja wielomianowa
 Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
Sformułowanie zadania interpolacji Metody Numeryczne Wykład 4 Wykład 5 Interpolacja wielomianowa Niech D R i niech F bȩdzie pewnym zbiorem funkcji f : D R. Niech x 0, x 1,..., x n bȩdzie ustalonym zbiorem
5. Rozwiązywanie układów równań liniowych
 5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
5. Rozwiązywanie układów równań liniowych Wprowadzenie (5.1) Układ n równań z n niewiadomymi: a 11 +a 12 x 2 +...+a 1n x n =a 10, a 21 +a 22 x 2 +...+a 2n x n =a 20,..., a n1 +a n2 x 2 +...+a nn x n =a
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony
 Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Przedmiotowy system oceniania wraz z określeniem wymagań edukacyjnych klasa druga zakres rozszerzony Wymagania konieczne (K) dotyczą zagadnień elementarnych, stanowiących swego rodzaju podstawę, zatem
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
przy warunkach początkowych: 0 = 0, 0 = 0
 MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
MODELE MATEMATYCZNE UKŁADÓW DYNAMICZNYCH Podstawową formą opisu procesów zachodzących w członach lub układach automatyki jest równanie ruchu - równanie dynamiki. Opisuje ono zależność wielkości fizycznych,
Zaawansowane metody numeryczne
 Wykład 1 Zadanie Definicja 1.1. (zadanie) Zadaniem nazywamy zagadnienie znalezienia rozwiązania x spełniającego równanie F (x, d) = 0, gdzie d jest zbiorem danych (od których zależy rozwiązanie x), a F
Wykład 1 Zadanie Definicja 1.1. (zadanie) Zadaniem nazywamy zagadnienie znalezienia rozwiązania x spełniającego równanie F (x, d) = 0, gdzie d jest zbiorem danych (od których zależy rozwiązanie x), a F
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Zaawansowane metody numeryczne
 Wykład 7 a szeregi Fouriera (zarówno w przypadku ciągłym, jak i dyskretnym) jest szczegónym przypadkiem aproksymacji funkcjami ortogonanymi. Anaitycznie rozwiązanie zadania aproksymacji trygonometrycznej
Wykład 7 a szeregi Fouriera (zarówno w przypadku ciągłym, jak i dyskretnym) jest szczegónym przypadkiem aproksymacji funkcjami ortogonanymi. Anaitycznie rozwiązanie zadania aproksymacji trygonometrycznej
Wstęp do metod numerycznych 7. Interpolacja. P. F. Góra
 Wstęp do metod numerycznych 7. Interpolacja P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2015 Interpolacja Dana jest funkcja w postaci stabelaryzowanej x i x 1 x 2 x 3... x n f i = f(x i ) f 1 f 2 f
Wstęp do metod numerycznych 7. Interpolacja P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2015 Interpolacja Dana jest funkcja w postaci stabelaryzowanej x i x 1 x 2 x 3... x n f i = f(x i ) f 1 f 2 f
Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I
 Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
Grafika komputerowa Wykład 7 Modelowanie obiektów graficznych cz. I Instytut Informatyki i Automatyki Państwowa Wyższa Szkoła Informatyki i Przedsiębiorczości w Łomży 2 0 0 9 Spis treści Spis treści 1
Układy równań i równania wyższych rzędów
 Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Rozdział Układy równań i równania wyższych rzędów Układy równań różniczkowych zwyczajnych Wprowadzenie W poprzednich paragrafach zajmowaliśmy się równaniami różniczkowymi y = f(x, y), których rozwiązaniem
Wstęp do metod numerycznych Rozwiazywanie równań algebraicznych. P. F. Góra
 Wstęp do metod numerycznych Rozwiazywanie równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2010 Co to znaczy rozwiazać równanie? Przypuśmy, że postawiono przed nami problem rozwiazania
Wstęp do metod numerycznych Rozwiazywanie równań algebraicznych P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2010 Co to znaczy rozwiazać równanie? Przypuśmy, że postawiono przed nami problem rozwiazania
Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum. w roku szkolnym 2012/2013
 Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum w roku szkolnym 2012/2013 I. Zakres materiału do próbnego egzaminu maturalnego z matematyki: 1) liczby rzeczywiste 2) wyrażenia algebraiczne
Próbny egzamin z matematyki dla uczniów klas II LO i III Technikum w roku szkolnym 2012/2013 I. Zakres materiału do próbnego egzaminu maturalnego z matematyki: 1) liczby rzeczywiste 2) wyrażenia algebraiczne
jest rozwiązaniem równania jednorodnego oraz dla pewnego to jest toŝsamościowo równe zeru.
 Układy liniowe Układ liniowy pierwszego rzędu, niejednorodny. gdzie Jeśli to układ nazywamy jednorodnym Pamiętamy, Ŝe kaŝde równanie liniowe rzędu m moŝe zostać sprowadzone do układu n równań liniowych
Układy liniowe Układ liniowy pierwszego rzędu, niejednorodny. gdzie Jeśli to układ nazywamy jednorodnym Pamiętamy, Ŝe kaŝde równanie liniowe rzędu m moŝe zostać sprowadzone do układu n równań liniowych
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-2)
") Jacek Złydach (JW) Wstęp Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-) Implementacja praktyczna Poniższa praktyczna implementacja stanowi uzupełnienie teoretycznych rozważań na temat interpolacji
Jacek Złydach (JW) Wstęp Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-) Implementacja praktyczna Poniższa praktyczna implementacja stanowi uzupełnienie teoretycznych rozważań na temat interpolacji
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, Spis treści
 Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ.
 A WYMAGANIA PODSTAWY PROGRAMOWEJ.") ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
ROZKŁAD MATERIAŁU DO II KLASY LICEUM (ZAKRES ROZSZERZONY) A WYMAGANIA PODSTAWY PROGRAMOWEJ. LICZBA TEMAT GODZIN LEKCYJNYCH Potęgi, pierwiastki i logarytmy (8 h) Potęgi 3 Pierwiastki 3 Potęgi o wykładnikach
Zwięzły kurs analizy numerycznej
 Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE
 CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
CHARAKTERYSTYKI CZĘSTOTLIWOŚCIOWE Do opisu członów i układów automatyki stosuje się, oprócz transmitancji operatorowej (), tzw. transmitancję widmową. Transmitancję widmową () wyznaczyć można na podstawie
5. Twierdzenie Weierstrassa
 Pytania egzaminacyjne z Metod Numerycznych 1. Jaką największą liczbę można zapisać w postaci znormalizowanej w dwójkowym systemie liczenia na 8-miu bitach podzielonych 4 + 4 na mantysę i cechę, jeśli zarówno
Pytania egzaminacyjne z Metod Numerycznych 1. Jaką największą liczbę można zapisać w postaci znormalizowanej w dwójkowym systemie liczenia na 8-miu bitach podzielonych 4 + 4 na mantysę i cechę, jeśli zarówno
Przekształcenia widmowe Transformata Fouriera. Adam Wojciechowski
 Przekształcenia widmowe Transformata Fouriera Adam Wojciechowski Przekształcenia widmowe Odmiana przekształceń kontekstowych, w których kontekstem jest w zasadzie cały obraz. Za pomocą transformaty Fouriera
Przekształcenia widmowe Transformata Fouriera Adam Wojciechowski Przekształcenia widmowe Odmiana przekształceń kontekstowych, w których kontekstem jest w zasadzie cały obraz. Za pomocą transformaty Fouriera
Algorytmy i struktury danych. wykład 9
 Plan wykładu:. Algorytmy numeryczne. Funkcja skrótu jest to funkcja H, która dla do dowolnej informacji m przyporządkowuje niespecyficzną wartość h, mającą cechy pseudolosowe. Cechy: skróty są zazwyczaj
Plan wykładu:. Algorytmy numeryczne. Funkcja skrótu jest to funkcja H, która dla do dowolnej informacji m przyporządkowuje niespecyficzną wartość h, mającą cechy pseudolosowe. Cechy: skróty są zazwyczaj
Lista nr 1 - Liczby zespolone
 Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
Lista nr - Liczby zespolone Zadanie. Obliczyć: a) ( 3 i) 3 ( 6 i ) 8 c) (+ 3i) 8 (i ) 6 + 3 i + e) f*) g) ( 3 i ) 77 ( ( 3 i + ) 3i 3i h) ( + 3i) 5 ( i) 0 i) i ( 3 i ) 4 ) +... + ( 3 i ) 0 Zadanie. Przedstawić
Rozwiązywanie równań nieliniowych i ich układów. Wyznaczanie zer wielomianów.
 Rozwiązywanie równań nieliniowych i ich układów. Wyznaczanie zer wielomianów. Plan wykładu: 1. Wyznaczanie pojedynczych pierwiastków rzeczywistych równań nieliniowych metodami a) połowienia (bisekcji)
Rozwiązywanie równań nieliniowych i ich układów. Wyznaczanie zer wielomianów. Plan wykładu: 1. Wyznaczanie pojedynczych pierwiastków rzeczywistych równań nieliniowych metodami a) połowienia (bisekcji)
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II
 ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
ZAGADNIENIA PROGRAMOWE I WYMAGANIA EDUKACYJNE DO TESTU PRZYROSTU KOMPETENCJI Z MATEMATYKI DLA UCZNIA KLASY II POZIOM ROZSZERZONY Równania i nierówności z wartością bezwzględną. rozwiązuje równania i nierówności
Newton vs. Lagrange - kto lepszy?
 Uniwersytet Mikołaja Kopernika Wydział Matematyki i Informatyki Katedra Analizy Matematycznej Agnieszka Rydzyńska nr albumu: 254231 Praca Zaliczeniowa z Seminarium Newton vs. Lagrange - kto lepszy? Opiekun
Uniwersytet Mikołaja Kopernika Wydział Matematyki i Informatyki Katedra Analizy Matematycznej Agnieszka Rydzyńska nr albumu: 254231 Praca Zaliczeniowa z Seminarium Newton vs. Lagrange - kto lepszy? Opiekun
Interpolacja i aproksymacja, pojęcie modelu regresji
 27 styczeń 2009 SciLab w obliczeniach numerycznych - część 3 Slajd 1 Interpolacja i aproksymacja, pojęcie modelu regresji 27 styczeń 2009 SciLab w obliczeniach numerycznych - część 3 Slajd 2 Plan zajęć
27 styczeń 2009 SciLab w obliczeniach numerycznych - część 3 Slajd 1 Interpolacja i aproksymacja, pojęcie modelu regresji 27 styczeń 2009 SciLab w obliczeniach numerycznych - część 3 Slajd 2 Plan zajęć
Zjawisko aliasingu. Filtr antyaliasingowy. Przecieki widma - okna czasowe.
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Komputerowe wspomaganie eksperymentu Zjawisko aliasingu.. Przecieki widma - okna czasowe. dr inż. Roland PAWLICZEK Zjawisko aliasingu
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Komputerowe wspomaganie eksperymentu Zjawisko aliasingu.. Przecieki widma - okna czasowe. dr inż. Roland PAWLICZEK Zjawisko aliasingu
Metody numeryczne w przykładach
 Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
2) R stosuje w obliczeniach wzór na logarytm potęgi oraz wzór na zamianę podstawy logarytmu.
 R stosuje w obliczeniach wzór na logarytm potęgi oraz wzór na zamianę podstawy logarytmu.") ZAKRES ROZSZERZONY 1. Liczby rzeczywiste. Uczeń: 1) przedstawia liczby rzeczywiste w różnych postaciach (np. ułamka zwykłego, ułamka dziesiętnego okresowego, z użyciem symboli pierwiastków, potęg); 2)
ZAKRES ROZSZERZONY 1. Liczby rzeczywiste. Uczeń: 1) przedstawia liczby rzeczywiste w różnych postaciach (np. ułamka zwykłego, ułamka dziesiętnego okresowego, z użyciem symboli pierwiastków, potęg); 2)
Analiza numeryczna kolokwium2a-15grudnia2005
 kolokwium2a-15grudnia2005 1.Niechf(x)=a n x n +a n 1 x n 1 +...+a 0.Jakąwartośćprzyjmujeilorazróżnicowy f[x 0,...,x n ]dladowolnychn+1paramiróżnychwęzłówx j?odpowiedźuzasadnić. 2. Pokazać, że zamiana zmiennych
kolokwium2a-15grudnia2005 1.Niechf(x)=a n x n +a n 1 x n 1 +...+a 0.Jakąwartośćprzyjmujeilorazróżnicowy f[x 0,...,x n ]dladowolnychn+1paramiróżnychwęzłówx j?odpowiedźuzasadnić. 2. Pokazać, że zamiana zmiennych
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa. P. F. Góra
 Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Równania różniczkowe liniowe II rzędu
 Równania różniczkowe liniowe II rzędu Definicja równania różniczkowego liniowego II rzędu Warunki początkowe dla równania różniczkowego II rzędu Równania różniczkowe liniowe II rzędu jednorodne (krótko
Równania różniczkowe liniowe II rzędu Definicja równania różniczkowego liniowego II rzędu Warunki początkowe dla równania różniczkowego II rzędu Równania różniczkowe liniowe II rzędu jednorodne (krótko
Komputerowa analiza zagadnień różniczkowych 10. Dwupunktowe problemy brzegowe (BVP, Boundary Value Problems)
") Komputerowa analiza zagadnień różniczkowych 10. Dwupunktowe problemy brzegowe (BVP, Boundary Value Problems) P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2007/08 Wprowadzenie Rozważmy
Komputerowa analiza zagadnień różniczkowych 10. Dwupunktowe problemy brzegowe (BVP, Boundary Value Problems) P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2007/08 Wprowadzenie Rozważmy
Wykład z równań różnicowych
 Wykład z równań różnicowych 1 Wiadomości wstępne Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp.
Wykład z równań różnicowych 1 Wiadomości wstępne Umówmy się, że na czas tego wykładu zrezygnujemy z oznaczania n-tego wyrazu ciągu symbolem typu x n, y n itp. Zamiast tego pisać będziemy x (n), y (n) itp.
dr inż. Damian Słota Gliwice r. Instytut Matematyki Politechnika Śląska
 Program wykładów z metod numerycznych na semestrze V stacjonarnych studiów stopnia I Podstawowe pojęcia metod numerycznych: zadanie numeryczne, algorytm. Analiza błędów: błąd bezwzględny i względny, przenoszenie
Program wykładów z metod numerycznych na semestrze V stacjonarnych studiów stopnia I Podstawowe pojęcia metod numerycznych: zadanie numeryczne, algorytm. Analiza błędów: błąd bezwzględny i względny, przenoszenie
3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B
![3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B](/thumbs/73/69286698.jpg "3 1 + i 1 i i 1 2i 2. Wyznaczyć macierze spełniające własność komutacji: [A, X] = B") 1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
1. Dla macierzy a) A = b) A = c) A = d) A = 3 1 + i 1 i i i 0 i i 0 1 + i 1 i 0 0 0 0 1 0 1 0 1 + i 1 i Wyznaczyć macierze spełniające własność komutacji: A, X = B. Obliczyć pierwiaski z macierzy: A =
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I
 Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Metody rozwiązania równania Schrödingera
 Metody rozwiązania równania Schrödingera Równanie Schrödingera jako algebraiczne zagadnienie własne Rozwiązanie analityczne dla skończonej i nieskończonej studni potencjału Problem rozwiązania równania
Metody rozwiązania równania Schrödingera Równanie Schrödingera jako algebraiczne zagadnienie własne Rozwiązanie analityczne dla skończonej i nieskończonej studni potencjału Problem rozwiązania równania
Algorytmy detekcji częstotliwości podstawowej
 Algorytmy detekcji częstotliwości podstawowej Plan Definicja częstotliwości podstawowej Wybór ramki sygnału do analizy Błędy oktawowe i dokładnej estymacji Metody detekcji częstotliwości podstawowej czasowe
Algorytmy detekcji częstotliwości podstawowej Plan Definicja częstotliwości podstawowej Wybór ramki sygnału do analizy Błędy oktawowe i dokładnej estymacji Metody detekcji częstotliwości podstawowej czasowe
Elementy projektowania inzynierskiego Przypomnienie systemu Mathcad
 Elementy projektowania inzynierskiego Definicja zmiennych skalarnych a : [S] - SPACE a [T] - TAB - CTRL b - SHIFT h h. : / Wyświetlenie wartości zmiennych a a = b h. h. = Przykładowe wyrażenia
Elementy projektowania inzynierskiego Definicja zmiennych skalarnych a : [S] - SPACE a [T] - TAB - CTRL b - SHIFT h h. : / Wyświetlenie wartości zmiennych a a = b h. h. = Przykładowe wyrażenia
PRZYKŁADY ROZWIĄZAŃ MES. Piotr Nikiel
 PRZYKŁADY ROZWIĄZAŃ MES Piotr Nikiel Metoda elementów skooczonych Metoda elementów skooczonych jest metodą rozwiązywania zadao brzegowych. MES jest wykorzystywana obecnie praktycznie we wszystkich dziedzinach
PRZYKŁADY ROZWIĄZAŃ MES Piotr Nikiel Metoda elementów skooczonych Metoda elementów skooczonych jest metodą rozwiązywania zadao brzegowych. MES jest wykorzystywana obecnie praktycznie we wszystkich dziedzinach
Matematyka licea ogólnokształcące, technika
 Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem
Matematyka licea ogólnokształcące, technika Opracowano m.in. na podstawie podręcznika MATEMATYKA w otaczającym nas świecie zakres podstawowy i rozszerzony Funkcja liniowa Funkcję f: R R określoną wzorem