Simulink MATLAB Przegląd obiektów i przykłady zastosowań
|
|
|
- Laura Pluta
- 7 lat temu
- Przeglądów:
Transkrypt
1 Simulink MATLAB Przegląd obiektów i przykłady zastosowań M. Berndt-Schreiber 1
2 Simulink MATLAB SIMULINK jest rozszerzeniem pakietu MATLAB; przy pomocy graficznego środowiska pozwala konstruować diagramy czasowe, reprezentujące określone procesy dynamiczne. M. Berndt-Schreiber 2
3 Simulink MATLAB W języku symulacyjnym SIMULINK najczęściej wykorzystuje się pliki MATLABa (typu.m) do rozwiązywania układów równań różniczkowych, liniowych i nieliniowych. M. Berndt-Schreiber 3
4 Simulink MATLAB Zamiast pisać kod MATLABa w SIMULINK opisujemy procesy w postaci połączonych bloków, wykorzystując odpowiednie ikony, reprezentujące dane wejściowe (input), części układu i dane wyjściowe (output). M. Berndt-Schreiber 4
5 Simulink Simulation and Link narzędzie (toolbox) MATLAB a umożliwia: modelowanie symulacje analizę układów dynamicznych M. Berndt-Schreiber 5

6 Obiekty SIMULINK - biblioteka M. Berndt-Schreiber 6

7 Obiekty SIMULINK - przegląd M. Berndt-Schreiber 7

8 Obiekty SIMULINK - przegląd M. Berndt-Schreiber 8

9 Obiekty SIMULINK - diagramy M. Berndt-Schreiber 9
10 Obiekty SIMULINK - diagramy M. Berndt-Schreiber 10

11 Obiekty SIMULINK - symulacje M. Berndt-Schreiber 11
12 SIMULINK - ustawienia symulacji M. Berndt-Schreiber 12

13 SIMULINK - ustawienia symulacji M. Berndt-Schreiber 13
14 Przykłady prostych modeli Konwersja Celsius Fahrenheit T F = 9/5(T C ) + 32 Bloki diagramu M. Berndt-Schreiber 14
15 Przykłady prostych modeli Konwersja Celsius Fahrenheit T F = 9/5(T C ) + 32 Połączenia bloków M. Berndt-Schreiber 15
16 Przykłady prostych modeli Przykładowy kod Matlaba: >> t=(0:.01:10);a=2;phi=pi/2;omega=5; >> xt=a*cos(omega*t+phi); >> plot(t,xt);grid M. Berndt-Schreiber 16
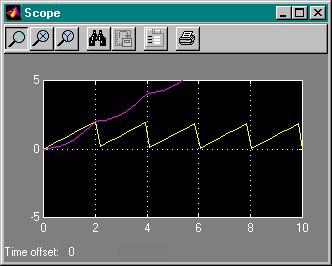
17 Prawa Newtona równanie diagram modelu wyniki symulacji M. Berndt-Schreiber 17

18 Równanie M. Berndt-Schreiber 18
19 Diagram M. Berndt-Schreiber 19

20 Wyniki symulacji M. Berndt-Schreiber 20
21 Termoregulacja ZAŁOŻENIA PODUKŁADY MODELOWE MODEL CAŁOŚCIOWY M. Berndt-Schreiber 21
22 Model termoregulacji - założenia Model instalacji cieplnej domu: termostat ustawiony na 70 stopni Farenheita jest narażony na zewnętrzne, dzienne fluktuacje temperatury fluktuacje temperatury modelowane przy pomocy funkcji sinusoidalnych M. Berndt-Schreiber 22
23 Model termoregulacji - moduły W modelu zastosowano podukłady modelowe w celu: uproszczenia analizy całości uzyskania samodzielnych modułów do ponownego wykorzystywania M. Berndt-Schreiber 23
24 Model termoregulacji - moduły Zastosowane podukłady: TERMOSTAT DOM KONWERTERY TEMPERATURY M. Berndt-Schreiber 24

25 Diagram modelu termoregulacji M. Berndt-Schreiber 25
26 Model podukładu dom M. Berndt-Schreiber 26
27 Model podukładu konwersja M. Berndt-Schreiber 27
28 Model podukładu termostat M. Berndt-Schreiber 28
29 PHYSBE w Simulink MATLAB zaawansowana symulacja układu krążenia M. Berndt-Schreiber 29
30 Physbe Idea Wersja Simulink MATLAB Moduły Rezultaty M. Berndt-Schreiber 30
31 Physbe - idea Klasyczny model układu krążenia człowieka John Mc Leod 1966 PHYSBE -.. a PHYSiological simulation BEnchmark experiment [SIMULATION, 7, (1966) ] M. Berndt-Schreiber 31
32 Physbe - idea Przepływ krwi zgodny z mechanizmem transportu - generuje przepływy: ciepła tlenu składników odżywczych M. Berndt-Schreiber 32
33 Physbe idea Próby implementacji modelu podejmowane przez wielu autorów w latach Wersja Simulink MATLAB dostępna za darmo do adaptacji własnej!! M. Berndt-Schreiber 33

34 Physbe schemat klasyczny M. Berndt-Schreiber 34
35 Physbe ograniczenia modelu nieuwzględnianie gęstości krwi uproszczony liniowy model przepływu krwi natychmiastowe zamykanie się zastawek liniowe reakcje organów, naczyń krwionośnych sztywny podział elementów układu M. Berndt-Schreiber 35

36 Physbe układ krążenia SIMULINK M. Berndt-Schreiber 36

37 Physbe - głowa M. Berndt-Schreiber 37

38 Physbe analiza podukładów M. Berndt-Schreiber 38

39 Physbe - aorta M. Berndt-Schreiber 39

40 Physbe kończyny górne M. Berndt-Schreiber 40

41 Physbe - kończyny dolne M. Berndt-Schreiber 41

42 Physbe - płuca M. Berndt-Schreiber 42

43 Physbe prawa komora serca M. Berndt-Schreiber 43

44 Physbe - tułów M. Berndt-Schreiber 44

45 Physbe - lewa komora serca M. Berndt-Schreiber 45

46 Physbe żyła główna M. Berndt-Schreiber 46

47 Physbe centrum monitorowania M. Berndt-Schreiber 47

48 Physbe ciśnienie - dane startowe M. Berndt-Schreiber 48

49 Physbe kontrola ciśnienia M. Berndt-Schreiber 49

50 Physbe kontrola pojemności M. Berndt-Schreiber 50
51 Lądowanie na księżycu w Simulink odtworzenie historycznego oprogramowania dla modułu lądującego M. Berndt-Schreiber 51
52 Lądowanie na księżycu Oryginalny projekt modułu lądującego LM (Lunar Module) Zasadnicze problemy Wersja Simulink MATLAB M. Berndt-Schreiber 52
53 Moduł lądowania na księżycu NASA - Program Apollo: Konkurs na projekt cyfrowego autopilota LM Realizacja projektu: MIT Instrumentation Laboratories [Richard J. Gran] M. Berndt-Schreiber 53
54 Moduł lądowania na księżycu Brak opracowań optymalnych procedur numerycznych kontrolnych przed rokiem ręczne kodowanie i liczenie Ograniczona prędkość i pojemność komputera (IBM 7090) Brak przyjaznego środowiska graficznego do testowania, system perforowanych kart ( 3 osoby przez 3 lata testowały kod!) M. Berndt-Schreiber 54
55 Moduł lądowania na księżycu Oryginalny zestaw kodów operacyjnych dla autopilota (implementowany na maszynie o zegarze 500 khz!!) M. Berndt-Schreiber 55

56 Moduł lądowania na księżycu Oryginalny diagram logiczny systemu przełączania... M. Berndt-Schreiber 56
57 Moduł lądowania na księżycu Fragment schematu blokowego testy w Fortranie... M. Berndt-Schreiber 57

58 Moduł lądowania na księżycu Uwzględnianie złożonych rotacji układu testowanego... M. Berndt-Schreiber 58

59 Moduł autopilot w Simulink Diagram tworzony w czasie około 1 godziny... M. Berndt-Schreiber 59

60 Moduł autopilot w Simulink Wszystkie parametry dostępne w środowisku graficznym.. M. Berndt-Schreiber 60

61 Moduł autopilot w Simulink Możliwość interakcyjnych testów graficznych... M. Berndt-Schreiber 61

62 Moduł autopilot w Simulink Kontrolny system przełączania w bibliotece Simulink... M. Berndt-Schreiber 62

63 Moduł autopilot w Simulink Algorytm układu kontrolnego uwzględniający złożone rotacje i odpowiedni diagram przepływów... M. Berndt-Schreiber 63

64 Moduł autopilot w Simulink Fragment generowanego kodu w języku Ada... M. Berndt-Schreiber 64
ELEMENTY AUTOMATYKI PRACA W PROGRAMIE SIMULINK 2013
 SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
SIMULINK część pakietu numerycznego MATLAB (firmy MathWorks) służąca do przeprowadzania symulacji komputerowych. Atutem programu jest interfejs graficzny (budowanie układów na bazie logicznie połączonych
INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI
 INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI BADANIE ZJAWISKA REZONANSU W SZEREGOWYM OBWODZIE RLC PRZY POMOCY PROGRAMU MATLAB/SIMULINK Autor: Tomasz Trawiński, Strona /7 . Cel ćwiczenia Celem ćwiczenia jest
INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI BADANIE ZJAWISKA REZONANSU W SZEREGOWYM OBWODZIE RLC PRZY POMOCY PROGRAMU MATLAB/SIMULINK Autor: Tomasz Trawiński, Strona /7 . Cel ćwiczenia Celem ćwiczenia jest
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu. Dynamicznych. Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s5 Komputerowa Symulacja Układów Nazwa modułu Dynamicznych Nazwa modułu w języku
Teraz bajty. Informatyka dla szkół ponadpodstawowych. Zakres rozszerzony. Część 1.
 Teraz bajty. Informatyka dla szkół ponadpodstawowych. Zakres rozszerzony. Część 1. Grażyna Koba MIGRA 2019 Spis treści (propozycja na 2*32 = 64 godziny lekcyjne) Moduł A. Wokół komputera i sieci komputerowych
Teraz bajty. Informatyka dla szkół ponadpodstawowych. Zakres rozszerzony. Część 1. Grażyna Koba MIGRA 2019 Spis treści (propozycja na 2*32 = 64 godziny lekcyjne) Moduł A. Wokół komputera i sieci komputerowych
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Nazwa przedmiotu: MODELOWANIE I SYMULACJA UKŁADÓW STEROWANIA Kierunek: Mechatronika Rodzaj przedmiotu: Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE C1.
Załącznik KARTA PRZEDMIOTU. KARTA PRZEDMIOTU Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 MODELOWANIE CYFROWE
 1/1 Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 Nazwa przedmiotu: Kierunek: Specjalność: MODELOWANIE CYFROWE INFORMATYKA Kod/nr Tryb studiów: STUDIA STACJONARNE JEDNOLITE MAGISTERSKIE
1/1 Wydział Automatyki, Elektroniki i Informatyki, Rok akademicki: 2009/2010 Nazwa przedmiotu: Kierunek: Specjalność: MODELOWANIE CYFROWE INFORMATYKA Kod/nr Tryb studiów: STUDIA STACJONARNE JEDNOLITE MAGISTERSKIE
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Elektrotechnika I stopień Ogólno akademicki. Przedmiot kierunkowy. Obowiązkowy Polski VI semestr zimowy
 KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
KARTA MODUŁU / KARTA PRZEDMIOTU Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Modelowanie i symulacja zagadnień biomedycznych PROJEKT BARTŁOMIEJ GRZEBYTA, JAKUB OTWOROWSKI
 Modelowanie i symulacja zagadnień biomedycznych PROJEKT BARTŁOMIEJ GRZEBYTA, JAKUB OTWOROWSKI Spis treści Wstęp... 2 Opis problemu... 3 Metoda... 3 Opis modelu... 4 Warunki brzegowe... 5 Wyniki symulacji...
Modelowanie i symulacja zagadnień biomedycznych PROJEKT BARTŁOMIEJ GRZEBYTA, JAKUB OTWOROWSKI Spis treści Wstęp... 2 Opis problemu... 3 Metoda... 3 Opis modelu... 4 Warunki brzegowe... 5 Wyniki symulacji...
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
Nazwa przedmiotu: Kierunek: Informatyka Rodzaj przedmiotu: moduł specjalności obowiązkowy: Inżynieria oprogramowania, Sieci komputerowe Rodzaj zajęć: wykład, laboratorium MODELOWANIE I SYMULACJA Modelling
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA II rok Kierunek Transport Temat: Minimalizacja funkcji logicznych. Projektowanie układów logicznych. Opracował
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA II rok Kierunek Transport Temat: Minimalizacja funkcji logicznych. Projektowanie układów logicznych. Opracował
MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH
 MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH 1. Przedmiot nie wymaga przedmiotów poprzedzających 2. Treść przedmiotu Proces i cykl decyzyjny. Rola modelowania matematycznego w procesach decyzyjnych.
MATEMATYCZNE METODY WSPOMAGANIA PROCESÓW DECYZYJNYCH 1. Przedmiot nie wymaga przedmiotów poprzedzających 2. Treść przedmiotu Proces i cykl decyzyjny. Rola modelowania matematycznego w procesach decyzyjnych.
MODELE I MODELOWANIE
 MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
MODELE I MODELOWANIE Model układ materialny (np. makieta) lub układ abstrakcyjny (np..rysunki, opisy słowne, równania matematyczne). Model fizyczny (nominalny) opis procesów w obiekcie (fizycznych, również
Biomechanika Inżynierska
 Biomechanika Inżynierska wykład 4 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska Biomechanika Inżynierska 1 Modele ciała człowieka Modele: 4 6 10 14 Biomechanika Inżynierska 2 Modele
Biomechanika Inżynierska wykład 4 Instytut Metrologii i Inżynierii Biomedycznej Politechnika Warszawska Biomechanika Inżynierska 1 Modele ciała człowieka Modele: 4 6 10 14 Biomechanika Inżynierska 2 Modele
Algorytm. Krótka historia algorytmów
 Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
PODSTAWY MODELOWANIA UKŁADÓW DYNAMICZNYCH W JĘZYKACH SYMULACYJNYCH
 PODSTAWY MODELOWANIA UKŁADÓW DYNAMICZNYCH W JĘZYKACH SYMULACYJNYCH ( Na przykładzie POWERSIM) M. Berndt-Schreiber 1 Plan Zasady modelowania Obiekty symbole graficzne Dyskretyzacja modelowania Predefiniowane
PODSTAWY MODELOWANIA UKŁADÓW DYNAMICZNYCH W JĘZYKACH SYMULACYJNYCH ( Na przykładzie POWERSIM) M. Berndt-Schreiber 1 Plan Zasady modelowania Obiekty symbole graficzne Dyskretyzacja modelowania Predefiniowane
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Matlab - zastosowania Matlab - applications. Informatyka II stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Matlab - zastosowania Matlab - applications A. USYTUOWANIE MODUŁU W SYSTEMIE
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Matlab - zastosowania Matlab - applications A. USYTUOWANIE MODUŁU W SYSTEMIE
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH II rok Kierunek Logistyka Temat: Minimalizacja funkcji logicznych.
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH II rok Kierunek Logistyka Temat: Minimalizacja funkcji logicznych.
Program BEST_RE. Pakiet zawiera następujące skoroszyty: BEST_RE.xls główny skoroszyt symulacji RES_VIEW.xls skoroszyt wizualizacji wyników obliczeń
 Program BEST_RE jest wynikiem prac prowadzonych w ramach Etapu nr 15 strategicznego programu badawczego pt. Zintegrowany system zmniejszenia eksploatacyjnej energochłonności budynków. Zakres prac obejmował
Program BEST_RE jest wynikiem prac prowadzonych w ramach Etapu nr 15 strategicznego programu badawczego pt. Zintegrowany system zmniejszenia eksploatacyjnej energochłonności budynków. Zakres prac obejmował
Rozdział 4: PIERWSZE KROKI
 Rozdział 4: PIERWSZE KROKI 4. Pierwsze kroki 4.1. Uruchomienie programu Program najłatwiej uruchomić za pośrednictwem skrótu na pulpicie, choć równie dobrze możemy tego dokonać poprzez Menu Start systemu
Rozdział 4: PIERWSZE KROKI 4. Pierwsze kroki 4.1. Uruchomienie programu Program najłatwiej uruchomić za pośrednictwem skrótu na pulpicie, choć równie dobrze możemy tego dokonać poprzez Menu Start systemu
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Dostawa oprogramowania. Nr sprawy: ZP /15
 ........ (pieczątka adresowa Oferenta) Zamawiający: Państwowa Wyższa Szkoła Zawodowa w Nowym Sączu, ul. Staszica,33-300 Nowy Sącz. Strona: z 5 Arkusz kalkulacyjny określający minimalne parametry techniczne
........ (pieczątka adresowa Oferenta) Zamawiający: Państwowa Wyższa Szkoła Zawodowa w Nowym Sączu, ul. Staszica,33-300 Nowy Sącz. Strona: z 5 Arkusz kalkulacyjny określający minimalne parametry techniczne
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Modelowanie bilansu energetycznego pomieszczeń (1)
") Wydział Inżynierii Środowiska Politechnika Wrocławska Modelowanie bilansu energetycznego pomieszczeń (1) 2 / 7 Na czym polega ćwiczenie? Ćwiczenie polega na badaniu modelu nagrzewnicy wodnej i chłodnicy
Wydział Inżynierii Środowiska Politechnika Wrocławska Modelowanie bilansu energetycznego pomieszczeń (1) 2 / 7 Na czym polega ćwiczenie? Ćwiczenie polega na badaniu modelu nagrzewnicy wodnej i chłodnicy
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera
 Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Zaproszenie na szkolenie otwarte
 Zaproszenie na szkolenie otwarte Kurs 1: FlexSim Podstawy Kurs 2: FlexSim Process Flow InterMarium Sp. z o.o. Tel. +48 796 662 770 http://flexsim.pl Ważne informacje Szkolenie odbędzie się w siedzibie
Zaproszenie na szkolenie otwarte Kurs 1: FlexSim Podstawy Kurs 2: FlexSim Process Flow InterMarium Sp. z o.o. Tel. +48 796 662 770 http://flexsim.pl Ważne informacje Szkolenie odbędzie się w siedzibie
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia
 Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia Postępowanie na świadczenie usług badawczo-rozwojowych referencyjny Zamawiającego: ZO CERTA 1/2017 Celem Projektu jest opracowanie wielokryterialnych
Załącznik nr 1 do Zapytania ofertowego: Opis przedmiotu zamówienia Postępowanie na świadczenie usług badawczo-rozwojowych referencyjny Zamawiającego: ZO CERTA 1/2017 Celem Projektu jest opracowanie wielokryterialnych
INSTRUKCJA DO ĆWICZENIA NR 7
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 7 PRZEDMIOT TEMAT OPRACOWAŁ LABORATORIUM MODELOWANIA Przykładowe analizy danych: przebiegi czasowe, portrety
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI
 WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
WYZNACZANIE NIEPEWNOŚCI POMIARU METODAMI SYMULACYJNYMI Stefan WÓJTOWICZ, Katarzyna BIERNAT ZAKŁAD METROLOGII I BADAŃ NIENISZCZĄCYCH INSTYTUT ELEKTROTECHNIKI ul. Pożaryskiego 8, 04-703 Warszawa tel. (0)
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Cel i zakres pracy dyplomowej inżynierskiej. Nazwisko Imię kontakt Modelowanie oderwania strug w wirniku wentylatora promieniowego
 Cel i zakres pracy dyplomowej inżynierskiej przejściowej Modelowanie oderwania strug w wirniku wentylatora promieniowego Metody projektowania wentylatorów promieniowych Ireneusz Czajka iczajka@agh.edu.pl
Cel i zakres pracy dyplomowej inżynierskiej przejściowej Modelowanie oderwania strug w wirniku wentylatora promieniowego Metody projektowania wentylatorów promieniowych Ireneusz Czajka iczajka@agh.edu.pl
Modelowanie absorbcji cząsteczek LDL w ściankach naczyń krwionośnych
 Modelowanie absorbcji cząsteczek LDL w ściankach naczyń krwionośnych Plan prezentacji Co to jest LDL? 1 Budowa naczynia krwionośnego 2 Przykładowe wyniki 3 Mechanizmy wnikania blaszki miażdżycowej w ścianki
Modelowanie absorbcji cząsteczek LDL w ściankach naczyń krwionośnych Plan prezentacji Co to jest LDL? 1 Budowa naczynia krwionośnego 2 Przykładowe wyniki 3 Mechanizmy wnikania blaszki miażdżycowej w ścianki
METODA ELEMENTÓW SKOŃCZONYCH.
 METODA ELEMENTÓW SKOŃCZONYCH. W programie COMSOL multiphisics 3.4 Wykonali: Łatas Szymon Łakomy Piotr Wydzał, Kierunek, Specjalizacja, Semestr, Rok BMiZ, MiBM, TPM, VII, 2011 / 2012 Prowadzący: Dr hab.inż.
METODA ELEMENTÓW SKOŃCZONYCH. W programie COMSOL multiphisics 3.4 Wykonali: Łatas Szymon Łakomy Piotr Wydzał, Kierunek, Specjalizacja, Semestr, Rok BMiZ, MiBM, TPM, VII, 2011 / 2012 Prowadzący: Dr hab.inż.
Obliczenia równoległe i rozproszone. Praca zbiorowa pod redakcją Andrzeja Karbowskiego i Ewy Niewiadomskiej-Szynkiewicz
 Obliczenia równoległe i rozproszone Praca zbiorowa pod redakcją Andrzeja Karbowskiego i Ewy Niewiadomskiej-Szynkiewicz 15 czerwca 2001 Spis treści Przedmowa............................................
Obliczenia równoległe i rozproszone Praca zbiorowa pod redakcją Andrzeja Karbowskiego i Ewy Niewiadomskiej-Szynkiewicz 15 czerwca 2001 Spis treści Przedmowa............................................
Projektowanie Wirtualne bloki tematyczne PW I
 Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
Podstawowe zagadnienia egzaminacyjne Projektowanie Wirtualne - część teoretyczna Projektowanie Wirtualne bloki tematyczne PW I 1. Projektowanie wirtualne specyfika procesu projektowania wirtualnego, podstawowe
REFERAT PRACY DYPLOMOWEJ Temat pracy: SUDOKU - Algorytmy tworzenia i rozwiązywania
 REFERAT PRACY DYPLOMOWEJ Temat pracy: SUDOKU - Algorytmy tworzenia i rozwiązywania Autor: Anna Nowak Promotor: dr inż. Jan Kowalski Kategorie: gra logiczna Słowa kluczowe: Sudoku, generowanie plansz, algorytmy,
REFERAT PRACY DYPLOMOWEJ Temat pracy: SUDOKU - Algorytmy tworzenia i rozwiązywania Autor: Anna Nowak Promotor: dr inż. Jan Kowalski Kategorie: gra logiczna Słowa kluczowe: Sudoku, generowanie plansz, algorytmy,
Hydromechanika i urządzenia hydrauliczne
 Opis przedmiotu: Hydromechanika i urządzenia hydrauliczne Kod przedmiotu Nazwa przedmiotu TR.NIS606 Hydromechanika i urządzenia hydrauliczne Wersja przedmiotu 2013/2014 A. Usytuowanie przedmiotu w systemie
Opis przedmiotu: Hydromechanika i urządzenia hydrauliczne Kod przedmiotu Nazwa przedmiotu TR.NIS606 Hydromechanika i urządzenia hydrauliczne Wersja przedmiotu 2013/2014 A. Usytuowanie przedmiotu w systemie
Rozwiązywanie równań liniowych. Transmitancja. Charakterystyki częstotliwościowe
 Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
Zał. nr do ZW 33/01 WYDZIAŁ Informatyki i Zarządzania / STUDIUM KARTA PRZEDMIOTU Nazwa w języku polskim Modele systemów dynamicznych Nazwa w języku angielskim Dynamic Systems Models. Kierunek studiów (jeśli
OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI
 IEN 2013 wszelkie prawa zastrzeżone www.ien.gda.pl e-mail: ien@ien.gda.pl OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI (SYSTEMU EKSPERTOWEGO) SYSTEMÓW OBSZAROWEJ
IEN 2013 wszelkie prawa zastrzeżone www.ien.gda.pl e-mail: ien@ien.gda.pl OPRACOWANIE ZAŁOŻEŃ I REALIZACJA LABORATORYJNEGO SYMULATORA DO BADANIA MODUŁU PODPOWIEDZI (SYSTEMU EKSPERTOWEGO) SYSTEMÓW OBSZAROWEJ
Modelowanie w języku Matlab-Simulink
 Jakub Wierciak Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Modelowanie (Osowski 1997) Modelowanie i symulacja zjawisk i procesów
Jakub Wierciak Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Modelowanie (Osowski 1997) Modelowanie i symulacja zjawisk i procesów
Technologie informacyjne - wykład 12 -
 Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Rys 1 Schemat modelu masa- sprężyna- tłumik
 Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Rys 1 Schemat modelu masa- sprężyna- tłumik gdzie: m-masa bloczka [kg], ẏ prędkośćbloczka [ m s ]. 3. W kolejnym energię potencjalną: gdzie: y- przemieszczenie bloczka [m], k- stała sprężystości, [N/m].
Algorytm. Słowo algorytm pochodzi od perskiego matematyka Mohammed ibn Musa al-kowarizimi (Algorismus - łacina) z IX w. ne.
 z IX w. ne.") Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII. Roman Kaula
 POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
POLITECHNIKA ŚLĄSKA WYDZIAŁ GÓRNICTWA I GEOLOGII Roman Kaula ZASTOSOWANIE NOWOCZESNYCH NARZĘDZI INŻYNIERSKICH LabVIEW oraz MATLAB/Simulink DO MODELOWANIA UKŁADÓW DYNAMICZNYCH PLAN WYKŁADU Wprowadzenie
WPROWADZENIE DO ŚRODOWISKA SCICOS
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki WPROWADZENIE DO ŚRODOWISKA SCICOS Materiały pomocnicze do ćwiczeń laboratoryjnych Oryginał: Modeling and Simulation in Scilab/Scicos Stephen L.
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Informatyka studia stacjonarne pierwszego stopnia
 #382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
#382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
Modelowanie układów energoelektronicznych w środowisku MATLAB-SIMULINK
 Modelowanie układów energoelektronicznych w środowisku MATLAB-SIMULINK Tomasz Bajdecki Instytut Energetyki Oddział Gdańsk Zakład OGC IEn Gdańsk 2011 Gdańsk 11.04.2011 r. Program prezentacji Mały wstęp
Modelowanie układów energoelektronicznych w środowisku MATLAB-SIMULINK Tomasz Bajdecki Instytut Energetyki Oddział Gdańsk Zakład OGC IEn Gdańsk 2011 Gdańsk 11.04.2011 r. Program prezentacji Mały wstęp
Roboty Przemysłowe. Rys. 1. Główne okno Automation Studio.
 Roboty Przemysłowe 2. Pozycjonowane zderzakowo manipulatory pneumatyczne - symulacja pracy manipulatora w środowisku Automation Studio Celem ćwiczenia jest przygotowanie i przeprowadzenie symulacji ruchu
Roboty Przemysłowe 2. Pozycjonowane zderzakowo manipulatory pneumatyczne - symulacja pracy manipulatora w środowisku Automation Studio Celem ćwiczenia jest przygotowanie i przeprowadzenie symulacji ruchu
Informatyka I stopień (I stopień / II stopień) ogólno akademicki (ogólno akademicki / praktyczny) podstawowy (podstawowy / kierunkowy / inny HES)
 ogólno akademicki (ogólno akademicki / praktyczny) podstawowy (podstawowy / kierunkowy / inny HES)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Modelowanie i wizualizacja procesów fizycznych Nazwa modułu w języku angielskim
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Modelowanie i wizualizacja procesów fizycznych Nazwa modułu w języku angielskim
Repetytorium z matematyki 3,0 1,0 3,0 3,0. Analiza matematyczna 1 4,0 2,0 4,0 2,0. Analiza matematyczna 2 6,0 2,0 6,0 2,0
 PROGRAM STUDIÓW I INFORMACJE OGÓLNE 1. Nazwa jednostki prowadzącej kierunek: Wydział Matematyki i Informatyki 2. Nazwa kierunku: Informatyka 3. Oferowane specjalności: 4. Poziom kształcenia: studia pierwszego
PROGRAM STUDIÓW I INFORMACJE OGÓLNE 1. Nazwa jednostki prowadzącej kierunek: Wydział Matematyki i Informatyki 2. Nazwa kierunku: Informatyka 3. Oferowane specjalności: 4. Poziom kształcenia: studia pierwszego
SI w procesach przepływu i porządkowania informacji. Paweł Buchwald Wyższa Szkoła Biznesu
 SI w procesach przepływu i porządkowania informacji Paweł Buchwald Wyższa Szkoła Biznesu Początki SI John MC Carthy prekursor SI Alan Thuring pomysłodawca testu na określenie inteligencji maszyn Powolny
SI w procesach przepływu i porządkowania informacji Paweł Buchwald Wyższa Szkoła Biznesu Początki SI John MC Carthy prekursor SI Alan Thuring pomysłodawca testu na określenie inteligencji maszyn Powolny
Odniesienie do kierunkowych efektów kształcenia Zna podstawowe możliwości pakietu Matlab
 Załącznik nr 5 do Uchwały nr 1202 Senatu UwB z dnia 29 lutego 2012 r. Matlab, programowanie i zastosowania nazwa przedmiotu SYLABUS A. Informacje ogólne Tę część wypełnia koordynator przedmiotu (w porozumieniu
Załącznik nr 5 do Uchwały nr 1202 Senatu UwB z dnia 29 lutego 2012 r. Matlab, programowanie i zastosowania nazwa przedmiotu SYLABUS A. Informacje ogólne Tę część wypełnia koordynator przedmiotu (w porozumieniu
Systemy Wbudowane. Założenia i cele przedmiotu: Określenie przedmiotów wprowadzających wraz z wymaganiami wstępnymi: Opis form zajęć
 Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Elementy cyfrowe i układy logiczne
 Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Analiza Algebra Podstawy programowania strukturalnego. Podstawowe wiadomości o funkcjach Podstawowe wiadomości o macierzach Podstawy programowania
 Załącznik nr 5 do Uchwały nr 1202 Senatu UwB z dnia 29 lutego 2012 r. Elementy składowe sylabusu Nazwa jednostki prowadzącej kierunek Nazwa kierunku studiów Poziom kształcenia Profil studiów Forma studiów
Załącznik nr 5 do Uchwały nr 1202 Senatu UwB z dnia 29 lutego 2012 r. Elementy składowe sylabusu Nazwa jednostki prowadzącej kierunek Nazwa kierunku studiów Poziom kształcenia Profil studiów Forma studiów
R o g e r A c c e s s C o n t r o l S y s t e m 5. Nota aplikacyjna nr 016 Wersja dokumentu: Rev. A. obecności w VISO
 R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 016 Wersja dokumentu: Rev. A Rejestracja i monitorowanie obecności w VISO Uwaga: Niniejszy dokument dotyczy RACS v5.5 (VISO 1.5.2 lub
R o g e r A c c e s s C o n t r o l S y s t e m 5 Nota aplikacyjna nr 016 Wersja dokumentu: Rev. A Rejestracja i monitorowanie obecności w VISO Uwaga: Niniejszy dokument dotyczy RACS v5.5 (VISO 1.5.2 lub
PCD2K. Wysoki stopień zaawansowania Uniwersalność.
 PCD2K to uniwersalne oprogramowanie do prowadzenia badań dynamicznych lub statycznych za pomocą produkowanych przez nas maszyn testowych. Wysoki stopień zaawansowania Uniwersalność To najważniejsze charakterystyki
PCD2K to uniwersalne oprogramowanie do prowadzenia badań dynamicznych lub statycznych za pomocą produkowanych przez nas maszyn testowych. Wysoki stopień zaawansowania Uniwersalność To najważniejsze charakterystyki
Temat: Model TS + ANFIS. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: Model TS + ANFIS Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Pierwszym rodzajem modelowania
Temat: Model TS + ANFIS Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1 Wprowadzenie Pierwszym rodzajem modelowania
Modelowanie i Animacja
 Maciej Matyka Uniwersytet Wrocławski Maciej Matyka Plan wykładu Dlaczego animujemy używając komputera? Dlaczego animujemy używając komputera? Wyciąg z minimum programowego fizyki w liceum... Kinematyka
Maciej Matyka Uniwersytet Wrocławski Maciej Matyka Plan wykładu Dlaczego animujemy używając komputera? Dlaczego animujemy używając komputera? Wyciąg z minimum programowego fizyki w liceum... Kinematyka
Propozycje tematów prac magisterskich dla studentów planujących obronę w roku akademickim 2016/2017 lub w latach późniejszych.
 dr M. Kopernik Propozycje tematów prac magisterskich dla studentów planujących obronę w roku akademickim 2016/2017 lub w latach późniejszych. Tematy inżynierskie mogą być podobne, ale realizowane w węższym
dr M. Kopernik Propozycje tematów prac magisterskich dla studentów planujących obronę w roku akademickim 2016/2017 lub w latach późniejszych. Tematy inżynierskie mogą być podobne, ale realizowane w węższym
MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY KOŃCOWEJ DOJU MASZYNOWEGO KRÓW
 Problemy Inżynierii Rolniczej nr 4/2007 Henryk Juszka, Stanisław Lis, Marcin Tomasik, Piotr Jezierski Katedra Energetyki Rolniczej Akademia Rolnicza w Krakowie MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY
Problemy Inżynierii Rolniczej nr 4/2007 Henryk Juszka, Stanisław Lis, Marcin Tomasik, Piotr Jezierski Katedra Energetyki Rolniczej Akademia Rolnicza w Krakowie MODELOWANIE WSPÓŁZALEŻNOŚCI PARAMETRÓW FAZY
Układ krążenia krwi. Bogdan Walkowiak. Zakład Biofizyki Instytut Inżynierii Materiałowej Politechnika Łódzka. 2014-11-18 Biofizyka 1
 Wykład 7 Układ krążenia krwi Bogdan Walkowiak Zakład Biofizyki Instytut Inżynierii Materiałowej Politechnika Łódzka 2014-11-18 Biofizyka 1 Układ krążenia krwi Source: INTERNET 2014-11-18 Biofizyka 2 Co
Wykład 7 Układ krążenia krwi Bogdan Walkowiak Zakład Biofizyki Instytut Inżynierii Materiałowej Politechnika Łódzka 2014-11-18 Biofizyka 1 Układ krążenia krwi Source: INTERNET 2014-11-18 Biofizyka 2 Co
DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI
 DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI mgr Marcin Pawlak Katedra Inwestycji i Wyceny Przedsiębiorstw Plan wystąpienia
DWUKROTNA SYMULACJA MONTE CARLO JAKO METODA ANALIZY RYZYKA NA PRZYKŁADZIE WYCENY OPCJI PRZEŁĄCZANIA FUNKCJI UŻYTKOWEJ NIERUCHOMOŚCI mgr Marcin Pawlak Katedra Inwestycji i Wyceny Przedsiębiorstw Plan wystąpienia
ćw. Symulacja układów cyfrowych Data wykonania: Data oddania: Program SPICE - Symulacja działania układów liczników 7490 i 7493
 Laboratorium Komputerowe Wspomaganie Projektowania Układów Elektronicznych Jarosław Gliwiński, Paweł Urbanek 1. Cel ćwiczenia ćw. Symulacja układów cyfrowych Data wykonania: 16.05.08 Data oddania: 30.05.08
Laboratorium Komputerowe Wspomaganie Projektowania Układów Elektronicznych Jarosław Gliwiński, Paweł Urbanek 1. Cel ćwiczenia ćw. Symulacja układów cyfrowych Data wykonania: 16.05.08 Data oddania: 30.05.08
Stanisław SZABŁOWSKI
 Dydaktyka Informatyki 12(2017) ISSN 2083-3156 DOI: 10.15584/di.2017.12.26 http://www.di.univ.rzeszow.pl Wydział Matematyczno-Przyrodniczy UR Laboratorium Zagadnień Społeczeństwa Informacyjnego Stanisław
Dydaktyka Informatyki 12(2017) ISSN 2083-3156 DOI: 10.15584/di.2017.12.26 http://www.di.univ.rzeszow.pl Wydział Matematyczno-Przyrodniczy UR Laboratorium Zagadnień Społeczeństwa Informacyjnego Stanisław
MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM 200
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Wprowadzenie do Simulinka w środowisku MATLAB Pytania i zadania do ćwiczeń laboratoryjnych
Temat: ANFIS + TS w zadaniach. Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE
 Temat: ANFIS + TS w zadaniach Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1. Systemy neuronowo - rozmyte Systemy
Temat: ANFIS + TS w zadaniach Instrukcja do ćwiczeń przedmiotu INŻYNIERIA WIEDZY I SYSTEMY EKSPERTOWE Dr inż. Barbara Mrzygłód KISiM, WIMiIP, AGH mrzyglod@ agh.edu.pl 1. Systemy neuronowo - rozmyte Systemy
Algorytm. Krótka historia algorytmów
 Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Algorytm znaczenie cybernetyczne Jest to dokładny przepis wykonania w określonym porządku skończonej liczby operacji, pozwalający na rozwiązanie zbliżonych do siebie klas problemów. znaczenie matematyczne
Język UML w modelowaniu systemów informatycznych
 Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
Język UML w modelowaniu systemów informatycznych dr hab. Bożena Woźna-Szcześniak Akademia im. Jan Długosza bwozna@gmail.com Wykład 4 Diagramy aktywności I Diagram aktywności (czynności) (ang. activity
Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.19 Numer zadania: 01
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Politechnika Poznańska. Metoda Elementów Skończonych
 Politechnika Poznańska Metoda Elementów Skończonych Mechanika i Budowa Maszyn Gr. M-5 Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonali: Damian Woźniak Michał Walerczyk 1 Spis treści 1.Analiza zjawiska
Politechnika Poznańska Metoda Elementów Skończonych Mechanika i Budowa Maszyn Gr. M-5 Prowadzący: dr hab. Tomasz Stręk, prof. nadzw. Wykonali: Damian Woźniak Michał Walerczyk 1 Spis treści 1.Analiza zjawiska
Informatyka II stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny) Kierunkowy (podstawowy / kierunkowy / inny HES)
 Ogólnoakademicki (ogólno akademicki / praktyczny) Kierunkowy (podstawowy / kierunkowy / inny HES)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Modelowanie Dynamiczne Procesów Biznesowych Dynamic Modeling of Business
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013 Modelowanie Dynamiczne Procesów Biznesowych Dynamic Modeling of Business
PLATFORMA TELEMEDYCZNA Pro-PLUS
 PLATFORMA TELEMEDYCZNA Pro-PLUS Przygotowała: Agnieszka Tomczak Warszawa, 1 lutego 2015 r. Platforma Telemedyczna Pro-PLUS to oprogramowanie w wersji WEB, dostępne dla użytkowników z dowolnego miejsca
PLATFORMA TELEMEDYCZNA Pro-PLUS Przygotowała: Agnieszka Tomczak Warszawa, 1 lutego 2015 r. Platforma Telemedyczna Pro-PLUS to oprogramowanie w wersji WEB, dostępne dla użytkowników z dowolnego miejsca
Algorytmy i schematy blokowe
 Algorytmy i schematy blokowe Algorytm dokładny przepis podający sposób rozwiązania określonego zadania w skończonej liczbie kroków; zbiór poleceń odnoszących się do pewnych obiektów, ze wskazaniem porządku,
Algorytmy i schematy blokowe Algorytm dokładny przepis podający sposób rozwiązania określonego zadania w skończonej liczbie kroków; zbiór poleceń odnoszących się do pewnych obiektów, ze wskazaniem porządku,
Badania właściwości dynamicznych sieci gazowej z wykorzystaniem pakietu SimNet TSGas 3
 Andrzej J. Osiadacz Maciej Chaczykowski Łukasz Kotyński Badania właściwości dynamicznych sieci gazowej z wykorzystaniem pakietu SimNet TSGas 3 Andrzej J. Osiadacz, Maciej Chaczykowski, Łukasz Kotyński,
Andrzej J. Osiadacz Maciej Chaczykowski Łukasz Kotyński Badania właściwości dynamicznych sieci gazowej z wykorzystaniem pakietu SimNet TSGas 3 Andrzej J. Osiadacz, Maciej Chaczykowski, Łukasz Kotyński,
Kurs programowania. Wykład 12. Wojciech Macyna. 7 czerwca 2017
 Wykład 12 7 czerwca 2017 Czym jest UML? UML składa się z dwóch podstawowych elementów: notacja: elementy graficzne, składnia języka modelowania, metamodel: definicje pojęć języka i powiazania pomiędzy
Wykład 12 7 czerwca 2017 Czym jest UML? UML składa się z dwóch podstawowych elementów: notacja: elementy graficzne, składnia języka modelowania, metamodel: definicje pojęć języka i powiazania pomiędzy
Publiczne Technikum Informatyczne Computer College w Koszalinie
 PYTANIA KONKURS INFORMATYCZNY Informatyka, Informacja, Infostrada 3 x i II edycja z marca 2016 roku Strona 1 1. Program komputerowy z licencją Shareware upoważnia między innymi do: a) rozpowszechniania
PYTANIA KONKURS INFORMATYCZNY Informatyka, Informacja, Infostrada 3 x i II edycja z marca 2016 roku Strona 1 1. Program komputerowy z licencją Shareware upoważnia między innymi do: a) rozpowszechniania
MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION STUDIO
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-14 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-14 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOMATION
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Sławomir Kulesza. Projektowanie automatów asynchronicznych
 Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Sławomir Kulesza Technika cyfrowa Projektowanie automatów asynchronicznych Wykład dla studentów III roku Informatyki Wersja 3.0, 03/01/2013 Automaty skończone Automat skończony (Finite State Machine FSM)
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
ZMODYFIKOWANY Szczegółowy opis przedmiotu zamówienia
 ZP/ITS/11/2012 Załącznik nr 1a do SIWZ ZMODYFIKOWANY Szczegółowy opis przedmiotu zamówienia Przedmiotem zamówienia jest: Przygotowanie zajęć dydaktycznych w postaci kursów e-learningowych przeznaczonych
ZP/ITS/11/2012 Załącznik nr 1a do SIWZ ZMODYFIKOWANY Szczegółowy opis przedmiotu zamówienia Przedmiotem zamówienia jest: Przygotowanie zajęć dydaktycznych w postaci kursów e-learningowych przeznaczonych
Numeryczna algebra liniowa
 Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak podstawowe operacje na wektorach i macierzach, a także rozwiązywanie układów
Numeryczna algebra liniowa Numeryczna algebra liniowa obejmuje szereg algorytmów dotyczących wektorów i macierzy, takich jak podstawowe operacje na wektorach i macierzach, a także rozwiązywanie układów
Instalacja programu:
 Instrukcja programu Konwerter Lido Aktualizacja instrukcji : 2012/03/25 INSTALACJA PROGRAMU:... 1 OKNO PROGRAMU OPIS... 3 DODANIE MODUŁÓW KONWERSJI... 3 DODANIE LICENCJI... 5 DODANIE FIRMY... 7 DODAWANIE
Instrukcja programu Konwerter Lido Aktualizacja instrukcji : 2012/03/25 INSTALACJA PROGRAMU:... 1 OKNO PROGRAMU OPIS... 3 DODANIE MODUŁÓW KONWERSJI... 3 DODANIE LICENCJI... 5 DODANIE FIRMY... 7 DODAWANIE
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 27 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 27 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Prototypowanie systemów sterowania
 Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Prototypowanie systemów sterowania Prowadzący: dr hab. inż. Mateusz Dybkowski, prof. Pwr. mgr inż. Szymon Bednarz Opracował: mgr inż. Szymon Bednarz Wrocław 2019 Laboratorium nr 6 Zasady testowania w czasie
Informatyka. Wykład 0. Witold Dyrka 13/2/2012
 Informatyka Wykład 0 Witold Dyrka witold.dyrka@pwr.wroc.pl 13/2/2012 Dzisiejszy wykład w oparciu o... J. Brucker, A Brief History of Matlab. http://www.cpe.ku.ac.th/~anan/courses/204111-matlab/document-2004/2004-01-2-history-matlab-jim.ppt
Informatyka Wykład 0 Witold Dyrka witold.dyrka@pwr.wroc.pl 13/2/2012 Dzisiejszy wykład w oparciu o... J. Brucker, A Brief History of Matlab. http://www.cpe.ku.ac.th/~anan/courses/204111-matlab/document-2004/2004-01-2-history-matlab-jim.ppt
kierunkowy (podstawowy / kierunkowy / inny HES) obowiązkowy (obowiązkowy / nieobowiązkowy) język polski VII semestr zimowy (semestr zimowy / letni)
 obowiązkowy (obowiązkowy / nieobowiązkowy) język polski VII semestr zimowy (semestr zimowy / letni)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Próby wytrzymałościowe łożysk elastomerowych
 Próby wytrzymałościowe łożysk elastomerowych Specjalne oprogramowanie. Produkty zgodne z normą. Projekty na miarę. Doświadczenie Servosis posiada wieloletnie doświadczenie w dziedzinie badań materiałów
Próby wytrzymałościowe łożysk elastomerowych Specjalne oprogramowanie. Produkty zgodne z normą. Projekty na miarę. Doświadczenie Servosis posiada wieloletnie doświadczenie w dziedzinie badań materiałów
Przykładowe zadanie praktyczne
 Przykładowe zadanie praktyczne Opracuj projekt realizacji prac związanych z uruchomieniem i testowaniem kodera i dekodera PCM z układem scalonym MC 145502 zgodnie z zaleceniami CCITT G.721 (załączniki
Przykładowe zadanie praktyczne Opracuj projekt realizacji prac związanych z uruchomieniem i testowaniem kodera i dekodera PCM z układem scalonym MC 145502 zgodnie z zaleceniami CCITT G.721 (załączniki