METODY OBLICZENIOWE. Projekt nr 3.4. Dariusz Ostrowski, Wojciech Muła 2FD/L03
|
|
|
- Zbigniew Szczepan Biernacki
- 9 lat temu
- Przeglądów:
Transkrypt
1 METODY OBLICZENIOWE Projekt nr 3.4 Dariusz Ostrowski, Wojciech Muła 2FD/L03

2 Zadanie Nasze zadanie składało się z dwóch części: 1. Sformułowanie, przy użyciu metody Lagrange a II rodzaju, równania różniczkowego dla podanego układu mechanicznego. 2. Obliczenia i wizualizacja zachowania układu dla zadanych parametrów. Schemat układu przedstawia rysunek. g x m1 y l m2 z Układ składa się z dwóch punktów materialnych o masach m 1 i m 2 połączonych nieskrętną nicią o długości l, która została przeciągnięta przez otwór w płaszczyźnie. Na układ działa przyspieszenie grawitacyjne g (zwrot zaznaczony na rysunku). W układzie nie występuje tarcie. Parametry układu: m 1, m 2 masy punktów materialnych, l długość sznura, g przyspieszenie grawitacyjne Założenia: punkt 1 porusza się na płaszczyźnie YZ, zaś punkt 2 porusza się wzdłuż osi X. Wyprowadzenie równania Współrzędne uogólnione Do opisu punktu materialnego w przestrzeni R 3 potrzebne są trzy współrzędne; niech współrzędne x 1, y 1 i z 1 odnoszą się do punktu nr 1 (o masie m 1 ), zaś x 2, y 2 i z 2 do drugiego punktu (o masie m 2 ). Zatem liczba stopni swobody układu nieskrępowanego: n = 6. W układzie występują trzy więzy: 2
. W układzie nie występuje tarcie.")
3 1. Punkt materialny nr 1 porusza się na płaszczyźnie YZ, stąd x 1 = Punkt materialny nr 2 porusza się wzdłuż osi X, stąd y 2 = z 2 = Ruch punktów materialnych 1 i 2 nie jest niezależny. Uwzględniając wyżej wymienione więzy oraz długość sznurka l możemy stwierdzić, że pomiędzy współrzędnymi y 1 i z 1, a współrzędną x 2 występuje zależność: y z 2 1 = (l + x 2 ) 2. Łączna liczba więzów holonmicznych występujących w układzie wynosi: h = 4 (punkt 1. jedno równanie, punkt 2. dwa równania, punkt 3. jedno równanie). Stąd liczba stopni swobody układu jest równa: s = n h = 6 4 = 2. Jako współrzędne uogólnione przyjmiemy odległość r masy m 1 od otworu, przez który przeciągnięty jest sznur, oraz kąt (ϕ) obrotu sznura względem dodatniej półosi Z, czyli: q = (q 1,q 2 ) = (r,ϕ). r m1 ϕ z Wykorzystując wybrane współrzędne uogólnione oraz równania więzów przygotujemy wzory transformacyjne: y z 1 = r cos(ϕ), y 1 = r sin(ϕ), x 2 = r l, ż 1 = ṙ cosϕ r ϕsin(ϕ), ẏ 1 = ṙ sinϕ r ϕcos(ϕ), ẋ 2 = ṙ W ten sposób wszystkie niezerowe współrzędne i prędkości opisu pierwotnego są wyrażone przez współrzędne uogólnione i ich pochodne po czasie. 3

4 Równanie Lagrange a Energia kinetyczna układu wyrażona we współrzędnych pierwotnych wynosi: T = 1 2 m 1(ẏ ż 2 1) m 2(ẋ 2 2). Energia potencjalna punkt materialnego o masie m 2 jest wprost proporcjonalna do odległości tej masy od płaszczyzny (x 2 ); zatem U = m 2 g x 2. Po wykorzystaniu wzorów transformacyjnych, powyższe funkcje energii kinetycznej i potencjalnej przyjmują postać: T = 1 2 m ( 1 r2 ϕ 2 + ṙ 2) ( ) 1 + m 2ṙ2 2 g(r l), U = m 2 g (r l). Funkcja Lagrange a układu wyrażona we współrzędnych uogólnionych przyjmuje postać: L = T U = 1 2 m ( 1 r2 ϕ 2 + ṙ 2) ( ) 1 + m 2ṙ2 2 g(r l). Równanie Lagrange a ma postać: d dt ( L ġ i przy czym i {1,2} q 1 = r oraz q 2 = ϕ. ) L q i = P qi D qi q i Obliczamy pochodne cząstkowe występujące w równaniach Lagrange a: L ṙ = m 1ṙ = (m 1 + m 2 )ṙ, L ϕ = m 1r 2 ϕ, L r = m 1rϕ 2 m 2 g, L ϕ = 0. 4
 ( ) 1 + m 2ṙ2 2 g(r l).")
5 Równania ruchu Ponieważ na układ nie działają siły zewnętrzne oraz nie występują tłumienia ruchu, to równania ruchu przyjmują postać: Obliczając pochodne ostatecznie otrzymujemy: d dt [(m 1 + m 2 )ṙ] m 1 r ϕ 2 + m 2 g = 0, d [ m1 r 2 ϕ ] = 0. dt (m 1 + m 2 ) r m 1 r ϕ + m 2 g = 0, m 1 ( r2 ϕ + 2rṙ ϕ ) = 0. Realizacja w programie Matlab 6.0 Wbudowane w program Matlab funkcje rozwiązujące układy równań różniczkowych potrafią operować na równaniach postaci y = f (x,y). W naszym przypadku wektor y = [V r,ω ϕ,r,ϕ], zaś y = [V r,ω ϕ,r,ϕ ]. Należało tak przeformułować równania ruchu, aby mogły zostać obliczone przez program Matlab. Po prostych przekształceniach otrzymaliśmy: V r = m 1rω 2 ϕ m 2 g m 1 + m 2 ω ϕ = 2rV rω ϕ m 1 r = V r ω = ω ϕ m 1 r 2 = 2V rω ϕ r Wspomniane funkcje, używane przez nas, to ode23 oraz ode45, które rozwiązują układy równań przy użyciu metody Rungego-Kutty; funkcja ode45 jest bardziej dokładna (i jednocześnie wolniejsza), niż ode23. Równania są na tyle proste, że nie musieliśmy badać zachowania modelu dla innych funkcji serii ode. Użycie funkcji ode jest następujące: [T,Y] = ode( funkcja, tspan, y0) gdzie funkcja oblicza prawą stronę wyżej wymienionego układu (wektor y), tspan określa przedział czasu lub konkretne wartości t dla których wyznaczany jest wektor y. Parametr y0 to wektor wartości początkowych. Funkcja musi być zapisana w M-pliku; poniżej używana przez nas funkcja 5
![0 Wbudowane w program Matlab funkcje rozwiązujące układy równań różniczkowych potrafią operować na równaniach postaci y = f (x,y). W naszym przypadku wektor y = [V r,ω ϕ,r,ϕ], zaś y = [V r,ω ϕ,r,ϕ ].](/docs-images/44/8791776/images/page_5.jpg "Należało tak przeformułować równania ruchu, aby mogły zostać obliczone przez program Matlab.")
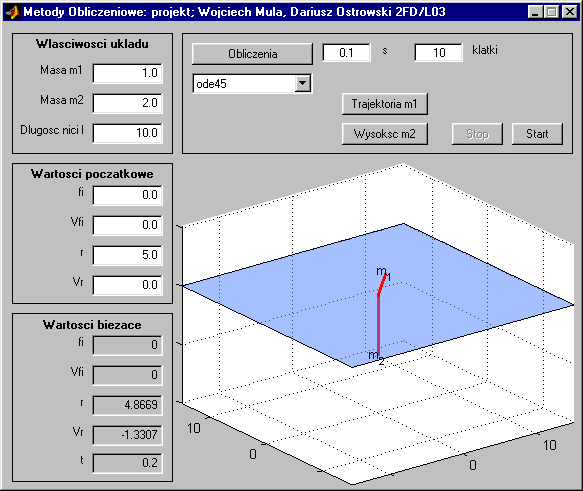
6 function [Dx]=derivative(t, x) global m1 m2 g l % parametry układu Vr = x(1) % wartości z kroku poprzedniego Vfi = x(2) % Vfi -- prędkość kątowa r = x(3) % sprawdzenie skrajnych przypadków if r < 1e-3 r = 1e-3 Vr = 0 end if r > l r = l Vr = 0 end % wyznaczenie wektora a = (m1*r*vfi*vfi - m2*g)/(m1+m2) b = (-2*Vr*Vfi)/r c = Vr d = Vfi Dx = [a; b; c; d] % Vr Vfi r fi Interfejs graficzny został zaprojektowany we wbudowanym w Matlab programie GUIDE. Użytkownik ma możliwość wprowadzenia wszystkich parametrów układu (za wyjątkiem przyspieszenia grawitacyjnego, które zostało ustalone na 9,98 m/s), zadać wartości początkowe oraz wybrać funkcję wykorzystywaną do obliczeń, określić krok czasowy i ilość kroków. Po obliczeniach można oglądnąć animację ruchu i obserwować na bieżąco wszystkie parametry lub też zobaczyć trajektorię ruchu masy m 1 albo wykres r(t). 6
, zadać wartości początkowe oraz wybrać funkcję")
7 7

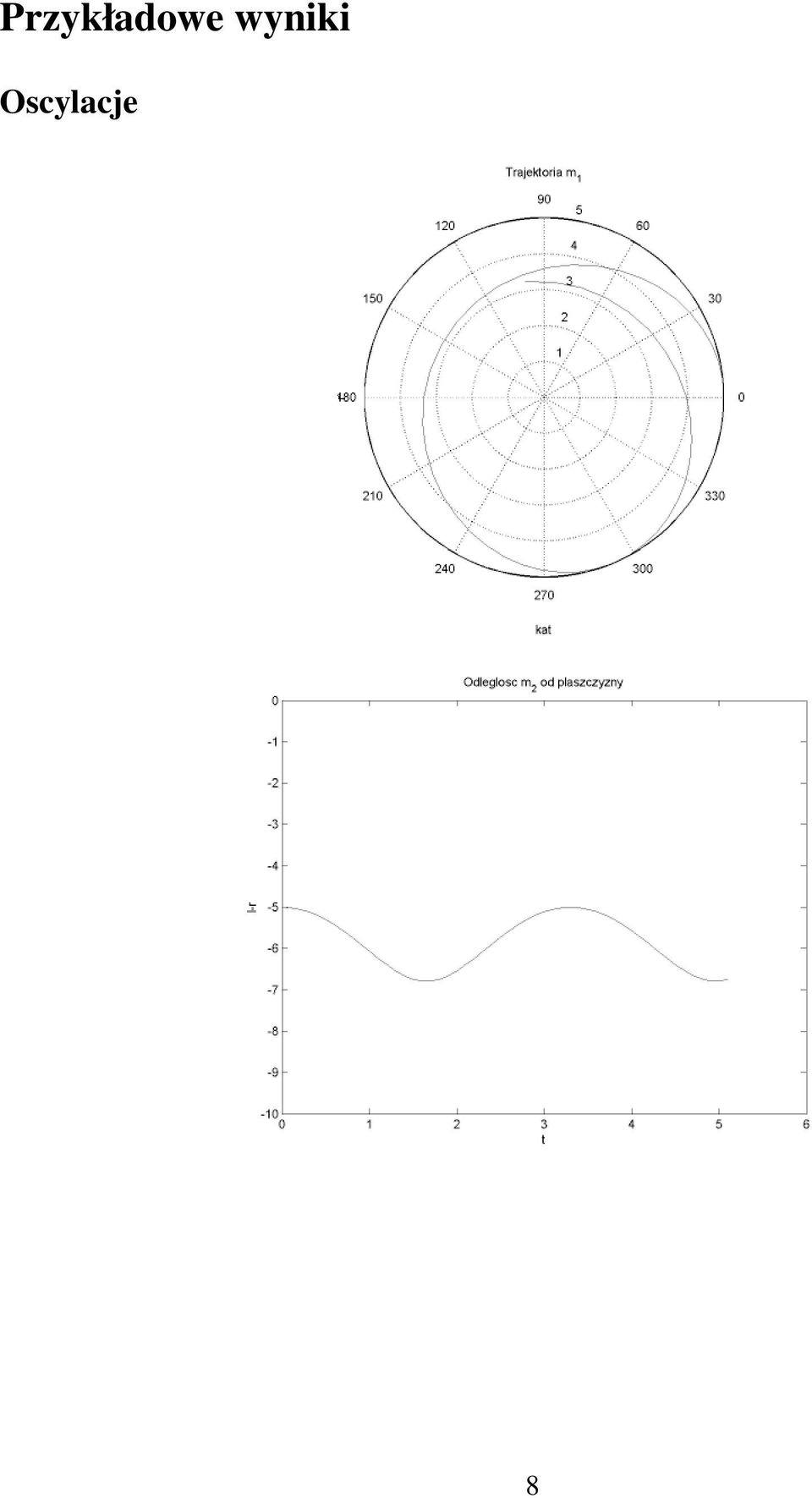
8 Przykładowe wyniki Oscylacje 8
9 Ruch swobodny Duża siła odśrodkowa 9
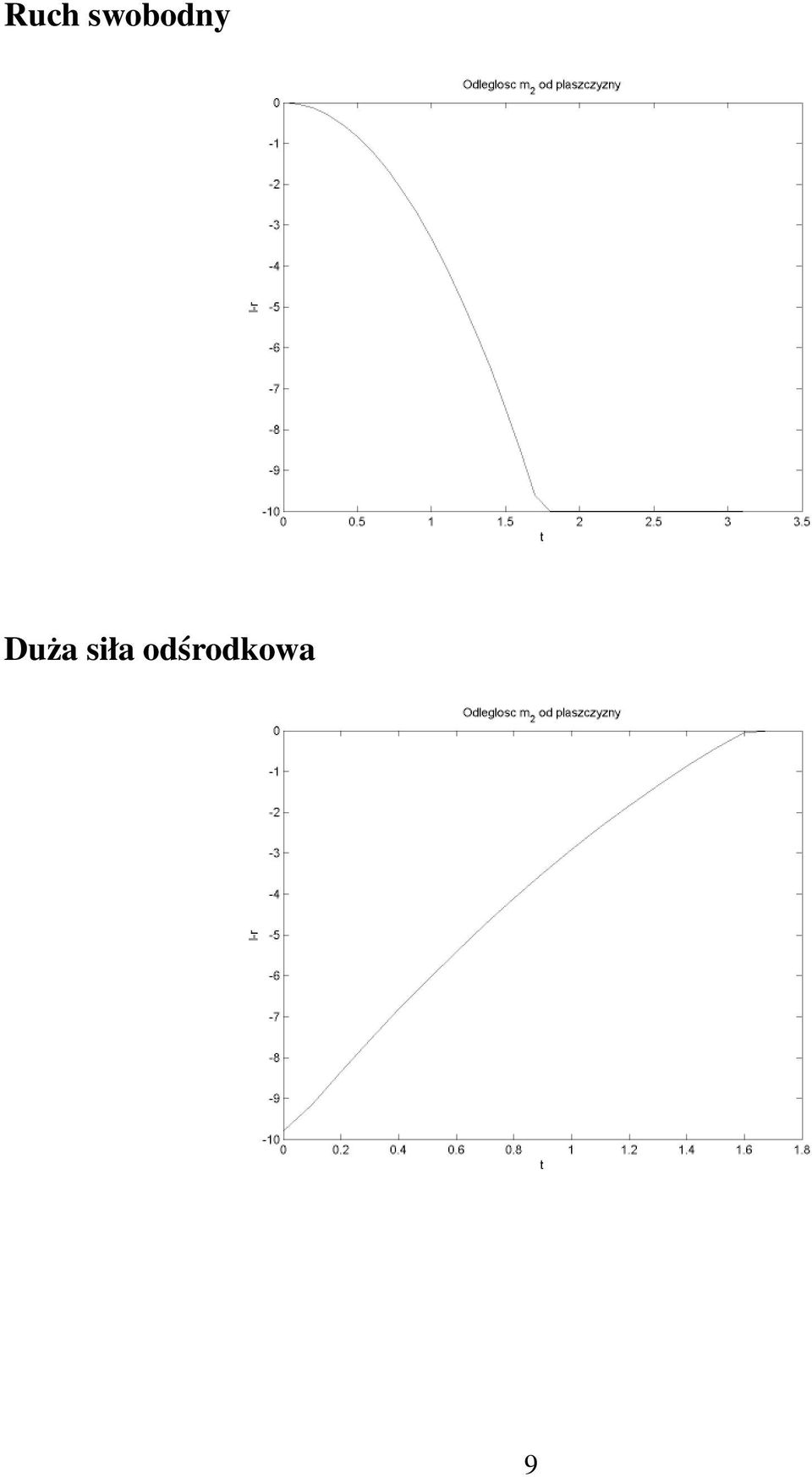
10 Ruch po okręgu (r < l) Taki efekt można uzyskać dla następujących danych: m 1 = 4, m 2 = 2, l = 10, r = 5 ω ϕ = 10 (Vfi). Ponieważ rysunki są w tym przypadku nieciekawe (m 1 porusza się po okręgu, r = const), więc nie zostaną zamieszczone. Wnioski Parametry równań ruchu nie zależą od czasu t ani od kąta ϕ. Na zachowanie układu mają wpływ trzy parametry. Równania ruchu mają sens fizyczny tylko gdy parametr r (0,l). Gdy r jest bliskie 0 (bliskie, ze względu na błędy obliczeń numerycznych), układ się zatrzymuje. Podobnie, gdy r staje się dostatecznie bliskie l, oznacza to, że siła odśrodkowa jest na tyle duża, że od tej chwili masa m 1 będzie poruszać się po okręgu o promieniu l. Obydwa skrajne przypadki zostały uwzględnione w M-funkcji. W zachowaniu modelu układu można wyróżnić cztery stany, w zależności od relacji pomiędzy siłą grawitacji działającą, a siłą odśrodkową spowodowaną ruchem obrotowym. Siły równoważą się i ruch masy punktowej m 1 odbywa się po okręgu (jeden z rysunków wyżej). Przeważa wyraźnie siła grawitacji i ww masa systematycznie zbliża się do otworu. Przeważa wyraźnie siła odśrodkowa i ww masa oddala się od otworu aż na długość sznura. W układzie występuję rezonans r(t) jest funkcją sinusoidalną. 10
, układ się zatrzymuje.")
Dynamika manipulatora. Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska. Podstawy robotyki wykład VI
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Cybernetyki Technicznej Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu w postaci
Równania różniczkowe opisujące ruch fotela z pilotem:
 . Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
. Katapultowanie pilota z samolotu Równania różniczkowe opisujące ruch fotela z pilotem: gdzie D - siłą ciągu, Cd współczynnik aerodynamiczny ciągu, m - masa pilota i fotela, g przys. ziemskie, ρ - gęstość
Modelowanie układów dynamicznych
 Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 11 Równania Eulera-Lagrange a Rozważmy układ p punktów materialnych o współrzędnych uogólnionych q i i zdefiniujmy lagranżian
Podstawy robotyki wykład VI. Dynamika manipulatora
 Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Podstawy robotyki Wykład VI Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Dynamika opisuje sposób zachowania się manipulatora poddanego wymuszeniu
Równa Równ n a i n e i ru r ch u u ch u po tor t ze (równanie drogi) Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym
 Prędkoś ędkoś w ru r ch u u ch pros pr t os ol t i ol n i io i wym") Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
Mechanika ogólna Wykład nr 14 Elementy kinematyki i dynamiki 1 Kinematyka Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez
mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej
 mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej ver-28.06.07 współrzędne uogólnione punkt materialny... wektor wodzący: prędkość: przyspieszenie: liczba
mechanika analityczna 1 nierelatywistyczna L.D.Landau, E.M.Lifszyc Krótki kurs fizyki teoretycznej ver-28.06.07 współrzędne uogólnione punkt materialny... wektor wodzący: prędkość: przyspieszenie: liczba
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej
 MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
MECHANIKA II. Dynamika ruchu obrotowego bryły sztywnej Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/
Symetrie i prawa zachowania Wykład 6
 Symetrie i prawa zachowania Wykład 6 Karol Kołodziej Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna 1/29 Rola symetrii Największym
Symetrie i prawa zachowania Wykład 6 Karol Kołodziej Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna 1/29 Rola symetrii Największym
Etap 1. Rysunek: Układy odniesienia
 Wprowadzenie. Jaś i Małgosia kręcą się na karuzeli symetrycznej dwuramiennej. Siedzą na karuzeli zwróceni do siebie twarzami, symetrycznie względem osi obrotu karuzeli. Jaś ma dropsa, którego chce dać
Wprowadzenie. Jaś i Małgosia kręcą się na karuzeli symetrycznej dwuramiennej. Siedzą na karuzeli zwróceni do siebie twarzami, symetrycznie względem osi obrotu karuzeli. Jaś ma dropsa, którego chce dać
Ruch jednostajnie zmienny prostoliniowy
 Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Ruch jednostajnie zmienny prostoliniowy Przyspieszenie w ruchu jednostajnie zmiennym prostoliniowym Jest to taki ruch, w którym wektor przyspieszenia jest stały, co do wartości (niezerowej), kierunku i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, Spis treści
 Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
Mechanika ogólna / Tadeusz Niezgodziński. - Wyd. 1, dodr. 5. Warszawa, 2010 Spis treści Część I. STATYKA 1. Prawa Newtona. Zasady statyki i reakcje więzów 11 1.1. Prawa Newtona 11 1.2. Jednostki masy i
SIŁA JAKO PRZYCZYNA ZMIAN RUCHU MODUŁ I: WSTĘP TEORETYCZNY
 SIŁA JAKO PRZYCZYNA ZMIAN RUCHU MODUŁ I: WSTĘP TEORETYCZNY Opracowanie: Agnieszka Janusz-Szczytyńska www.fraktaledu.mamfirme.pl TREŚCI MODUŁU: 1. Dodawanie sił o tych samych kierunkach 2. Dodawanie sił
SIŁA JAKO PRZYCZYNA ZMIAN RUCHU MODUŁ I: WSTĘP TEORETYCZNY Opracowanie: Agnieszka Janusz-Szczytyńska www.fraktaledu.mamfirme.pl TREŚCI MODUŁU: 1. Dodawanie sił o tych samych kierunkach 2. Dodawanie sił
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
w poprzednim odcinku 1 Wzorce sekunda Aktualnie niepewność pomiaru czasu to 1s na 70mln lat!!! 2 Modele w fizyce Uproszczenie problemów Tworzenie prostych modeli, pojęć i operowanie nimi 3 Opis ruchu Opis
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Więzy i ich klasyfikacja Wykład 2
 Więzy i ich klasyfikacja Wykład 2 Karol Kołodziej (przy współpracy Bartosza Dziewita) Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna
Więzy i ich klasyfikacja Wykład 2 Karol Kołodziej (przy współpracy Bartosza Dziewita) Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna
Modelowanie wybranych zjawisk fizycznych
 Ryszard Myhan Modelowanie zjawiska tarcia suchego Suwaka porusza się w poziomych prowadnicach, gdzie x=x(t) oznacza przesunięcie suwaka względem nieruchomej prowadnicy w kierunku zgodnym z kierunkiem siły
Ryszard Myhan Modelowanie zjawiska tarcia suchego Suwaka porusza się w poziomych prowadnicach, gdzie x=x(t) oznacza przesunięcie suwaka względem nieruchomej prowadnicy w kierunku zgodnym z kierunkiem siły
Spis treści. Wstęp Część I STATYKA
 Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
Spis treści Wstęp... 15 Część I STATYKA 1. WEKTORY. PODSTAWOWE DZIAŁANIA NA WEKTORACH... 17 1.1. Pojęcie wektora. Rodzaje wektorów... 19 1.2. Rzut wektora na oś. Współrzędne i składowe wektora... 22 1.3.
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Drgania układu o wielu stopniach swobody
 Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Drgania układu o wielu stopniach swobody Rozpatrzmy układ składający się z n ciał o masach m i (i =,,..., n, połączonych między sobą i z nieruchomym podłożem za pomocą elementów sprężystych o współczynnikach
Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący:
 Dynamika Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący: mamy ciało (zachowujące się jak punkt materialny) o znanych właściwościach (masa, ładunek itd.),
Dynamika Podstawowy problem mechaniki klasycznej punktu materialnego można sformułować w sposób następujący: mamy ciało (zachowujące się jak punkt materialny) o znanych właściwościach (masa, ładunek itd.),
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska. Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni
 Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka
 Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Jan Awrejcewicz- Mechanika Techniczna i Teoretyczna. Statyka. Kinematyka SPIS TREŚCI Przedmowa... 7 1. PODSTAWY MECHANIKI... 11 1.1. Pojęcia podstawowe... 11 1.2. Zasada d Alemberta... 18 1.3. Zasada prac
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Kinematyka płynów - zadania
 Zadanie 1 Zadane jest prawo ruchu w zmiennych Lagrange a x = Xe y = Ye t 0 gdzie, X, Y oznaczają współrzędne materialne dla t = 0. Wyznaczyć opis ruchu w zmiennych Eulera. Znaleźć linię prądu. Pokazać,
Zadanie 1 Zadane jest prawo ruchu w zmiennych Lagrange a x = Xe y = Ye t 0 gdzie, X, Y oznaczają współrzędne materialne dla t = 0. Wyznaczyć opis ruchu w zmiennych Eulera. Znaleźć linię prądu. Pokazać,
FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE
 Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Umiejętności opracowanie: Maria Lampert LISTA MOICH OSIĄGNIĘĆ FIGURY I PRZEKSZTAŁCENIA GEOMETRYCZNE Co powinienem umieć Umiejętności znam podstawowe przekształcenia geometryczne: symetria osiowa i środkowa,
Układy fizyczne z więzami Wykład 2
 Układy fizyczne z więzami Wykład 2 Karol Kołodziej (przy współpracy Bartosza Dziewita) Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna
Układy fizyczne z więzami Wykład 2 Karol Kołodziej (przy współpracy Bartosza Dziewita) Instytut Fizyki Uniwersytet Śląski, Katowice http://kk.us.edu.pl Karol Kołodziej Mechanika klasyczna i relatywistyczna
MECHANIKA 2. Praca, moc, energia. Wykład Nr 11. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
MECHANIKA 2 Wykład Nr 11 Praca, moc, energia Prowadzący: dr Krzysztof Polko PRACA MECHANICZNA SIŁY STAŁEJ Pracą siły stałej na prostoliniowym przemieszczeniu w kierunku działania siły nazywamy iloczyn
ZASADY DYNAMIKI. Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał.
 ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
ZASADY DYNAMIKI Przedmiotem dynamiki jest badanie przyczyn i sposobów zmiany ruchu ciał Dynamika klasyczna zbudowana jest na trzech zasadach podanych przez Newtona w 1687 roku I zasada dynamiki Istnieją
Fizyka 1(mechanika) AF14. Wykład 5
 AF14. Wykład 5") Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Jerzy Łusakowski 30.10.2017 Plan wykładu Ziemia jako układ nieinercjalny Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Dwaj obserwatorzy- związek między mierzonymi współrzędnymi
Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Jerzy Łusakowski 30.10.2017 Plan wykładu Ziemia jako układ nieinercjalny Fizyka 1(mechanika) 1100-1AF14 Wykład 5 Dwaj obserwatorzy- związek między mierzonymi współrzędnymi
Elementy rachunku różniczkowego i całkowego
 Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
Elementy rachunku różniczkowego i całkowego W paragrafie tym podane zostaną elementarne wiadomości na temat rachunku różniczkowego i całkowego oraz przykłady jego zastosowania w fizyce. Małymi literami
MECHANIKA 2. Drgania punktu materialnego. Wykład Nr 8. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
MECHANIKA 2 Wykład Nr 8 Drgania punktu materialnego Prowadzący: dr Krzysztof Polko Wstęp Drgania Okresowe i nieokresowe Swobodne i wymuszone Tłumione i nietłumione Wstęp Drgania okresowe ruch powtarzający
autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3
... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3") autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3 Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią zadania PYTANIA ZAMKNIĘTE Zadanie
autor: Włodzimierz Wolczyński rozwiązywał (a)... ARKUSIK 13 RUCH OBROTOWY BRYŁY SZTYWNEJ. CZĘŚĆ 3 Rozwiązanie zadań należy zapisać w wyznaczonych miejscach pod treścią zadania PYTANIA ZAMKNIĘTE Zadanie
Wykład 9: Fale cz. 1. dr inż. Zbigniew Szklarski
 Wykład 9: Fale cz. 1 dr inż. Zbigniew Szklarski szkla@agh.edu.pl http://layer.uci.agh.edu.pl/z.szklarski/ Klasyfikacja fal fale mechaniczne zaburzenie przemieszczające się w ośrodku sprężystym, fale elektromagnetyczne
Wykład 9: Fale cz. 1 dr inż. Zbigniew Szklarski szkla@agh.edu.pl http://layer.uci.agh.edu.pl/z.szklarski/ Klasyfikacja fal fale mechaniczne zaburzenie przemieszczające się w ośrodku sprężystym, fale elektromagnetyczne
Opis ruchu obrotowego
 Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
Opis ruchu obrotowego Oprócz ruchu translacyjnego ciała obserwujemy w przyrodzie inną jego odmianę: ruch obrotowy Ruch obrotowy jest zawsze względem osi obrotu W ruchu obrotowym wszystkie punkty zakreślają
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu
 MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
MECHANIKA 2 Wykład 7 Dynamiczne równania ruchu Prowadzący: dr Krzysztof Polko Dynamiczne równania ruchu Druga zasada dynamiki zapisana w postaci: Jest dynamicznym wektorowym równaniem ruchu. Dynamiczne
TEORIA DRGAŃ Program wykładu 2016
 TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
TEORIA DRGAŃ Program wykładu 2016 I. KINEMATYKA RUCHU POSTE POWEGO 1. Ruch jednowymiarowy 1.1. Prędkość (a) Prędkość średnia (b) Prędkość chwilowa (prędkość) 1.2. Przyspieszenie (a) Przyspieszenie średnie
Tadeusz Lesiak. Dynamika punktu materialnego: Praca i energia; zasada zachowania energii
 Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
Mechanika klasyczna Tadeusz Lesiak Wykład nr 4 Dynamika punktu materialnego: Praca i energia; zasada zachowania energii Energia i praca T. Lesiak Mechanika klasyczna 2 Praca Praca (W) wykonana przez stałą
Elementy dynamiki klasycznej - wprowadzenie. dr inż. Romuald Kędzierski
 Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Rys Model układu
 Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
Ćwiczenie 7 DRGANIA SWOBODNE UKŁADU O DWÓCH STOPNIACH SWOBODY. Cel ćwiczenia Doświadczalne wyznaczenie częstości drgań własnych układu o dwóch stopniach swobody, pokazanie postaci drgań odpowiadających
MECHANIKA 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO. Wykład Nr 2. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
MECHANIKA 2 Wykład Nr 2 RUCH POSTĘPOWY I OBROTOWY CIAŁA SZTYWNEGO Prowadzący: dr Krzysztof Polko WSTĘP z r C C(x C,y C,z C ) r C -r B B(x B,y B,z B ) r C -r A r B r B -r A A(x A,y A,z A ) Ciało sztywne
1. Kinematyka 8 godzin
 Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
Plan wynikowy (propozycja) część 1 1. Kinematyka 8 godzin Wymagania Treści nauczania (tematy lekcji) Cele operacyjne podstawowe ponadpodstawowe Uczeń: konieczne podstawowe rozszerzające dopełniające Jak
MECHANIKA 2. Wykład Nr 3 KINEMATYKA. Temat RUCH PŁASKI BRYŁY MATERIALNEJ. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
MECHANIKA 2 Wykład Nr 3 KINEMATYKA Temat RUCH PŁASKI BRYŁY MATERIALNEJ Prowadzący: dr Krzysztof Polko Pojęcie Ruchu Płaskiego Rys.1 Ruchem płaskim ciała sztywnego nazywamy taki ruch, w którym wszystkie
Sposoby modelowania układów dynamicznych. Pytania
 Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Sposoby modelowania układów dynamicznych Co to jest model dynamiczny? PAScz4 Modelowanie, analiza i synteza układów automatyki samochodowej równania różniczkowe, różnicowe, równania równowagi sił, momentów,
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
IV.3 Ruch swobodny i nieswobodny. Więzy. Reakcje więzów
 IV.3 Ruch swobodny i nieswobodny. Więzy. Reakcje więzów Jan Królikowski Fizyka IBC 1 Ruch swobodny i nieswobodny. Stany równowagi Rozważamy ciało w pewnym układzie inercjalnym (UI). Gdy: prędkość tego
IV.3 Ruch swobodny i nieswobodny. Więzy. Reakcje więzów Jan Królikowski Fizyka IBC 1 Ruch swobodny i nieswobodny. Stany równowagi Rozważamy ciało w pewnym układzie inercjalnym (UI). Gdy: prędkość tego
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ruch obrotowy bryły sztywnej. Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe
 Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
Ruch obrotowy bryły sztywnej Bryła sztywna - ciało, w którym odległości między poszczególnymi punktami ciała są stałe Ruch obrotowy ruch po okręgu P, t 1 P 1, t 1 θ 1 θ Ruch obrotowy ruch po okręgu P,
Pierwsze dwa podpunkty tego zadania dotyczyły równowagi sił, dla naszych rozważań na temat dynamiki ruchu obrotowego interesujące będzie zadanie 3.3.
 Dynamika ruchu obrotowego Zauważyłem, że zadania dotyczące ruchu obrotowego bardzo często sprawiają maturzystom wiele kłopotów. A przecież wystarczy zrozumieć i stosować zasady dynamiki Newtona. Przeanalizujmy
Dynamika ruchu obrotowego Zauważyłem, że zadania dotyczące ruchu obrotowego bardzo często sprawiają maturzystom wiele kłopotów. A przecież wystarczy zrozumieć i stosować zasady dynamiki Newtona. Przeanalizujmy
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
Treści dopełniające Uczeń potrafi:
 P Lp. Temat lekcji Treści podstawowe 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać wektory, odjąć wektor od wektora, pomnożyć
P Lp. Temat lekcji Treści podstawowe 1 Elementy działań na wektorach podać przykłady wielkości fizycznych skalarnych i wektorowych, wymienić cechy wektora, dodać wektory, odjąć wektor od wektora, pomnożyć
M2. WYZNACZANIE MOMENTU BEZWŁADNOŚCI WAHADŁA OBERBECKA
 M WYZNACZANE MOMENTU BEZWŁADNOŚC WAHADŁA OBERBECKA opracowała Bożena Janowska-Dmoch Do opisu ruchu obrotowego ciał stosujemy prawa dynamiki ruchu obrotowego, w których występują wielkości takie jak: prędkość
M WYZNACZANE MOMENTU BEZWŁADNOŚC WAHADŁA OBERBECKA opracowała Bożena Janowska-Dmoch Do opisu ruchu obrotowego ciał stosujemy prawa dynamiki ruchu obrotowego, w których występują wielkości takie jak: prędkość
Model odpowiedzi i schemat oceniania do arkusza II
 Model odpowiedzi i schemat oceniania do arkusza II Zadanie 12 (3 pkt) Z warunków zadania : 2 AM = MB > > n Wprowadzenie oznaczeń, naprzykład: A = (x, y) i obliczenie współrzędnych wektorów n Obliczenie
Model odpowiedzi i schemat oceniania do arkusza II Zadanie 12 (3 pkt) Z warunków zadania : 2 AM = MB > > n Wprowadzenie oznaczeń, naprzykład: A = (x, y) i obliczenie współrzędnych wektorów n Obliczenie
MECHANIKA 2. Zasady pracy i energii. Wykład Nr 12. Prowadzący: dr Krzysztof Polko
 MECHANIKA 2 Wykład Nr 12 Zasady pracy i energii Prowadzący: dr Krzysztof Polko WEKTOR POLA SIŁ Wektor pola sił możemy zapisać w postaci: (1) Prawa strona jest gradientem funkcji Φ, czyli (2) POTENCJAŁ
MECHANIKA 2 Wykład Nr 12 Zasady pracy i energii Prowadzący: dr Krzysztof Polko WEKTOR POLA SIŁ Wektor pola sił możemy zapisać w postaci: (1) Prawa strona jest gradientem funkcji Φ, czyli (2) POTENCJAŁ
VII.1 Pojęcia podstawowe.
 II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
II.1 Pojęcia podstawowe. Jan Królikowski Fizyka IBC 1 Model matematyczny ciała sztywnego Zbiór punktów materialnych takich, że r r = const; i, j= 1,... N i j Ciało sztywne nie ulega odkształceniom w wyniku
Blok 2: Zależność funkcyjna wielkości fizycznych. Rzuty
 Blok : Zależność funkcyjna wielkości fizycznych. Rzuty ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przeanalizuj wykresy zaprezentowane na rysunkach. Załóż, żę w każdym przypadku ciało poruszało się zgodnie ze
Blok : Zależność funkcyjna wielkości fizycznych. Rzuty ZESTAW ZADAŃ NA ZAJĘCIA ROZGRZEWKA 1. Przeanalizuj wykresy zaprezentowane na rysunkach. Załóż, żę w każdym przypadku ciało poruszało się zgodnie ze
Prosta i płaszczyzna w przestrzeni
 Prosta i płaszczyzna w przestrzeni Wybrane wzory i informacje Równanie prostej przechodzącej przez punkt P 0 = (x 0, y 0, z 0 ) o wektorze wodzącym r 0 i równoległej do wektora v = [a, b, c] : postać parametrycznego
Prosta i płaszczyzna w przestrzeni Wybrane wzory i informacje Równanie prostej przechodzącej przez punkt P 0 = (x 0, y 0, z 0 ) o wektorze wodzącym r 0 i równoległej do wektora v = [a, b, c] : postać parametrycznego
Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..)
") Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..) 24.02.2014 Prawa Keplera Na podstawie obserwacji zgromadzonych przez Tycho Brahe (głównie obserwacji Marsa)
Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..) 24.02.2014 Prawa Keplera Na podstawie obserwacji zgromadzonych przez Tycho Brahe (głównie obserwacji Marsa)
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
Wstęp do równań różniczkowych
 Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
Wstęp do równań różniczkowych Wykład 1 Lech Sławik Instytut Matematyki PK Literatura 1. Arnold W.I., Równania różniczkowe zwyczajne, PWN, Warszawa, 1975. 2. Matwiejew N.M., Metody całkowania równań różniczkowych
Geometria analityczna
 Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
Geometria analityczna Paweł Mleczko Teoria Informacja (o prostej). postać ogólna prostej: Ax + By + C = 0, A + B 0, postać kanoniczna (kierunkowa) prostej: y = ax + b. Współczynnik a nazywamy współczynnikiem
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
RÓWNANIA RÓŻNICZKOWE WYKŁAD 4 Obszar określoności równania Jeżeli występująca w równaniu y' f ( x, y) funkcja f jest ciągła, to równanie posiada rozwiązanie. Jeżeli f jest nieokreślona w punkcie (x 0,
Rozdział 23 KWANTOWA DYNAMIKA MOLEKULARNA Wstęp. Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1
 Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdział 3 KWANTOWA DYNAMIKA MOLEKULARNA 3.1 Wstęp Metoda ta umożliwia opis układu złożonego z wielu jonów i elektronów w stanie podstawowym. Hamiltonian układu
Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdział 3 KWANTOWA DYNAMIKA MOLEKULARNA 3.1 Wstęp Metoda ta umożliwia opis układu złożonego z wielu jonów i elektronów w stanie podstawowym. Hamiltonian układu
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Fizyka 11. Janusz Andrzejewski
 Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Fizyka 11 Ruch okresowy Każdy ruch powtarzający się w regularnych odstępach czasu nazywa się ruchem okresowym lub drganiami. Drgania tłumione ruch stopniowo zanika, a na skutek tarcia energia mechaniczna
Zasady dynamiki Newtona. Ilość ruchu, stan ruchu danego ciała opisuje pęd
 Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Siły - wektory Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub
Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Siły - wektory Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub
SZCZEGÓŁOWE WYMAGANIA EDUKACYJNE Z FIZYKI KLASA II
 SZCZEGÓŁOWE WYMAGANIA EDUKACYJNE Z FIZYKI KLASA II Energia mechaniczna Wymagania na stopień dopuszczający obejmują treści niezbędne dla dalszego kształcenia oraz użyteczne w pozaszkolnej działalności ucznia.
SZCZEGÓŁOWE WYMAGANIA EDUKACYJNE Z FIZYKI KLASA II Energia mechaniczna Wymagania na stopień dopuszczający obejmują treści niezbędne dla dalszego kształcenia oraz użyteczne w pozaszkolnej działalności ucznia.
Ruch drgający. Ruch harmoniczny prosty, tłumiony i wymuszony
 Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
Ruch drgający Ruch harmoniczny prosty, tłumiony i wymuszony Ruchem drgającym nazywamy ruch ciała zachodzący wokół stałego położenia równowagi. Ruchy drgające dzielimy na ruchy: okresowe, nieokresowe. Ruch
Obliczanie długości łuku krzywych. Autorzy: Witold Majdak
 Obliczanie długości łuku krzywych Autorzy: Witold Majdak 7 Obliczanie długości łuku krzywych Autor: Witold Majdak DEFINICJA Definicja : Długość łuku krzywej zadanej parametrycznie Rozważmy krzywą Γ zadaną
Obliczanie długości łuku krzywych Autorzy: Witold Majdak 7 Obliczanie długości łuku krzywych Autor: Witold Majdak DEFINICJA Definicja : Długość łuku krzywej zadanej parametrycznie Rozważmy krzywą Γ zadaną
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera
 Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Rozwiązywanie równań różniczkowych zwyczajnych za pomocą komputera Arkadiusz Syta A. Syta (Politechnika Lubelska) 1 / 19 Wstęp Przegląd wybranych pakietów oprogramowania i funkcji Rozwiązywanie równań
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne.
 Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
PF11- Dynamika bryły sztywnej.
 Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
Instytut Fizyki im. Mariana Smoluchowskiego Wydział Fizyki, Astronomii i Informatyki Stosowanej Uniwersytetu Jagiellońskiego Zajęcia laboratoryjne w I Pracowni Fizycznej dla uczniów szkół ponadgimnazjalych
INSTRUKCJA DO ĆWICZENIA NR 5
 KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
KATEDRA MECHANIKI STOSOWANEJ Wydział Mechaniczny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 5 PRZEDMIOT TEMAT OPRACOWAŁ MODELOWANIE UKŁADÓW MECHANICZNYCH Badania analityczne układu mechanicznego
MECHANIKA II. Dynamika układu punktów materialnych
 MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Dynamika układu punktów materialnych Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
PRACA. MOC. ENERGIA. 1/20
 PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
PRACA. MOC. ENERGIA. 1/20 Czym jest energia? Większość zjawisk w przyrodzie związana jest z przemianami energii. Energia może zostać przekazana od jednego ciała do drugiego lub ulec przemianie z jednej
Feynmana wykłady z fizyki. [T.] 1.1, Mechanika, szczególna teoria względności / R. P. Feynman, R. B. Leighton, M. Sands. wyd. 7.
![Feynmana wykłady z fizyki. [T.] 1.1, Mechanika, szczególna teoria względności / R. P. Feynman, R. B. Leighton, M. Sands. wyd. 7.](/thumbs/62/46898544.jpg "Feynmana wykłady z fizyki. [T.] 1.1, Mechanika, szczególna teoria względności / R. P. Feynman, R. B. Leighton, M. Sands. wyd. 7.") Feynmana wykłady z fizyki. [T.] 1.1, Mechanika, szczególna teoria względności / R. P. Feynman, R. B. Leighton, M. Sands. wyd. 7. Warszawa, 2014 Spis treści Spis rzeczy części 2 tomu I O Richardzie P. Feynmanie
Feynmana wykłady z fizyki. [T.] 1.1, Mechanika, szczególna teoria względności / R. P. Feynman, R. B. Leighton, M. Sands. wyd. 7. Warszawa, 2014 Spis treści Spis rzeczy części 2 tomu I O Richardzie P. Feynmanie
FUNKCJE ZESPOLONE Lista zadań 2005/2006
 FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
FUNKJE ZESPOLONE Lista zadań 25/26 Opracowanie: dr Jolanta Długosz Liczby zespolone. Obliczyć wartości podanych wyrażeń: (2 + ) ( ) 2 4 i (5 + i); b) (3 i)( 4 + 2i); c) 4 + i ; d) ( + i) 4 ; e) ( 2 + 3i)
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej
 Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Dynamika ruchu postępowego, ruchu punktu materialnego po okręgu i ruchu obrotowego bryły sztywnej Dynamika ruchu postępowego 1. Balon opada ze stałą prędkością. Jaką masę balastu należy wyrzucić, aby balon
Mechanika. Wykład 2. Paweł Staszel
 Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Mechanika Wykład 2 Paweł Staszel 1 Przejście graniczne 0 2 Podstawowe twierdzenia o pochodnych: pochodna funkcji mnożonej przez skalar pochodna sumy funkcji pochodna funkcji złożonej pochodna iloczynu
Ruch pod wpływem sił zachowawczych
 Ruch pod wpływem sił zachowawczych Fizyka I (B+C) Wykład XV: Energia potencjalna Siły centralne Ruch w polu grawitacyjnym Pole odpychajace Energia potencjalna Równania ruchu Znajomość energii potencjalnej
Ruch pod wpływem sił zachowawczych Fizyka I (B+C) Wykład XV: Energia potencjalna Siły centralne Ruch w polu grawitacyjnym Pole odpychajace Energia potencjalna Równania ruchu Znajomość energii potencjalnej
WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA
 WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA ROK SZKOLNY: 2018/2019 KLASY: 2mT OPRACOWAŁ: JOANNA NALEPA OCENA CELUJĄCY OCENA BARDZO DOBRY - w pełnym zakresie - w pełnym opanował zakresie opanował
WYMAGANIA EDUKACYJNE PRZEDMIOT : FIZYKA ROZSZERZONA ROK SZKOLNY: 2018/2019 KLASY: 2mT OPRACOWAŁ: JOANNA NALEPA OCENA CELUJĄCY OCENA BARDZO DOBRY - w pełnym zakresie - w pełnym opanował zakresie opanował
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 6 2016/2017, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Wykład FIZYKA I. 5. Energia, praca, moc. http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I 5. Energia, praca, moc Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html ENERGIA, PRACA, MOC Siła to wielkość
Wykład FIZYKA I 5. Energia, praca, moc Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html ENERGIA, PRACA, MOC Siła to wielkość
Zasady dynamiki Newtona. dr inż. Romuald Kędzierski
 Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
Zasady dynamiki Newtona dr inż. Romuald Kędzierski Czy do utrzymania ciała w ruchu jednostajnym prostoliniowym potrzebna jest siła? Arystoteles 384-322 p.n.e. Do utrzymania ciała w ruchu jednostajnym prostoliniowym
ROZWIĄZANIA DO ZADAŃ
 TURNIRJ MATEMATYCZNY ELIPSA dla klas LO ROZWIĄZANIA DO ZADAŃ Zadanie. (2 pkt.) Dla jakich wartości parametru m (m R), część wspólna przedziałów A = (, m m i B = 2m 2, + ) jest zbiorem pustym? / Jeśli A
TURNIRJ MATEMATYCZNY ELIPSA dla klas LO ROZWIĄZANIA DO ZADAŃ Zadanie. (2 pkt.) Dla jakich wartości parametru m (m R), część wspólna przedziałów A = (, m m i B = 2m 2, + ) jest zbiorem pustym? / Jeśli A
Stabilność II Metody Lapunowa badania stabilności
 Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Metody Lapunowa badania stabilności Interesuje nas w sposób szczególny system: Wprowadzamy dla niego pojęcia: - stabilności wewnętrznej - odnosi się do zachowania się systemu przy zerowym wejściu, czyli
Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział 2. Składanie ruchów Rozdział 3. Modelowanie zjawisk fizycznych...43 Numeryczne całkowanie,
 Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział. Składanie ruchów... 11 Rozdział 3. Modelowanie zjawisk fizycznych...43 Rozdział 4. Numeryczne całkowanie, czyli obliczanie pracy w polu grawitacyjnym
Rozdział 1. Prędkość i przyspieszenie... 5 Rozdział. Składanie ruchów... 11 Rozdział 3. Modelowanie zjawisk fizycznych...43 Rozdział 4. Numeryczne całkowanie, czyli obliczanie pracy w polu grawitacyjnym
Przykładowe zdania testowe I semestr,
 Przykładowe zdania testowe I semestr, 2015-2016 Rozstrzygnij, które z podanych poniżej zdań są prawdziwe, a które nie. Podstawy matematyczno-fizyczne. Działania na wektorach. Zagadnienia kluczowe: Układ
Przykładowe zdania testowe I semestr, 2015-2016 Rozstrzygnij, które z podanych poniżej zdań są prawdziwe, a które nie. Podstawy matematyczno-fizyczne. Działania na wektorach. Zagadnienia kluczowe: Układ
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na kierunku: Mechanika i Budowa Maszyn Rodzaj zajęć: wykład, ćwiczenia I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na kierunku: Mechanika i Budowa Maszyn Rodzaj zajęć: wykład, ćwiczenia I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ
 RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
RUCH OBROTOWY- MECHANIKA BRYŁY SZTYWNEJ Wykład 7 2012/2013, zima 1 MOMENT PĘDU I ENERGIA KINETYCZNA W RUCHU PUNKTU MATERIALNEGO PO OKRĘGU Definicja momentu pędu L=mrv=mr 2 ω L=Iω I= mr 2 p L r ω Moment
Dynamika Newtonowska trzy zasady dynamiki
 Dynamika Newtonowska trzy zasady dynamiki I. Zasada bezwładności Gdy działające siły równoważą się ciało fizyczne pozostaje w spoczynku lubporusza się ruchem prostoliniowym ze stałą prędkością. II. Zasada
Dynamika Newtonowska trzy zasady dynamiki I. Zasada bezwładności Gdy działające siły równoważą się ciało fizyczne pozostaje w spoczynku lubporusza się ruchem prostoliniowym ze stałą prędkością. II. Zasada
Plan wynikowy z wymaganiami edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum
 Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum Temat (rozumiany jako lekcja) Wymagania konieczne (ocena dopuszczająca) Dział
Plan wynikowy z mi edukacyjnymi przedmiotu fizyka w zakresie rozszerzonym dla I klasy liceum ogólnokształcącego i technikum Temat (rozumiany jako lekcja) Wymagania konieczne (ocena dopuszczająca) Dział
J. Szantyr - Wykład 3 Równowaga płynu
 J. Szantyr - Wykład 3 Równowaga płynu Siły wewnętrzne wzajemne oddziaływania elementów mas wydzielonego obszaru płynu, siły o charakterze powierzchniowym, znoszące się parami. Siły zewnętrzne wynik oddziaływania
J. Szantyr - Wykład 3 Równowaga płynu Siły wewnętrzne wzajemne oddziaływania elementów mas wydzielonego obszaru płynu, siły o charakterze powierzchniowym, znoszące się parami. Siły zewnętrzne wynik oddziaływania
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM
 WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
WYKAZ TEMATÓW Z LABORATORIUM DRGAŃ MECHANICZNYCH dla studentów semestru IV WM 1. Wprowadzenie do zajęć. Równania Lagrange'a II rodzaju Ćwiczenie wykonywane na podstawie rozdziału 3 [1] 2. Drgania swobodne
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt preskryptu do przedmiotu Podstawy Robotyki dr inż. Marek Wojtyra Instytut Techniki Lotniczej
KATEDRA ELEKTROTECHNIKI LABORATORIUM ELEKTROTECHNIKI
 KTEDR ELEKTROTECHNIKI LBORTORIUM ELEKTROTECHNIKI =================================================================================================== Temat ćwiczenia POMIRY OBODCH SPRZĘŻONYCH MGNETYCZNIE
KTEDR ELEKTROTECHNIKI LBORTORIUM ELEKTROTECHNIKI =================================================================================================== Temat ćwiczenia POMIRY OBODCH SPRZĘŻONYCH MGNETYCZNIE
Z przedstawionych poniżej stwierdzeń dotyczących wartości pędów wybierz poprawne. Otocz kółkiem jedną z odpowiedzi (A, B, C, D lub E).
.") Zadanie 1. (0 3) Podczas gry w badmintona zawodniczka uderzyła lotkę na wysokości 2 m, nadając jej poziomą prędkość o wartości 5. Lotka upadła w pewnej odległości od zawodniczki. Jest to odległość o jedną
Zadanie 1. (0 3) Podczas gry w badmintona zawodniczka uderzyła lotkę na wysokości 2 m, nadając jej poziomą prędkość o wartości 5. Lotka upadła w pewnej odległości od zawodniczki. Jest to odległość o jedną
Wykład FIZYKA I. 10. Ruch drgający tłumiony i wymuszony. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Siły oporu (tarcia)
Wykład FIZYKA I 1. Ruch drgający tłumiony i wymuszony Dr hab. inż. Władysław Artur Woźniak Instytut Fizyki Politechniki Wrocławskiej http://www.if.pwr.wroc.pl/~wozniak/fizyka1.html Siły oporu (tarcia)