POKL /10. Gliwice, SKN Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska RAPORT
|
|
|
- Edyta Lisowska
- 6 lat temu
- Przeglądów:
Transkrypt


1 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL /10 Program Operacyjny Kapitał Ludzki współfinansowany przez Unię Europejską ze środków Europejskiego Funduszu Społecznego Gliwice, SKN Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska dr hab. inż. Marek Pawełczyk, prof. nzw. w Politechnice Śląskiej Koordynator Projektu POKL /10 RAPORT Z działalności projektu budowy autonomicznego robota kroczącego typu hexapod, realizowanego w ramach Studenckiego Koła Naukowego Robotyki Encoder. dr inż. Damian Bereska opiekun naukowy projektu Tomasz Zielański kierownik zespołu
2 Raport z działalności projektu Budowa autonomicznego robota kroczącego typu hexapod ze zdolnością poruszania się w trudnym terenie etap Lista członków zespołu projektowego: - Gniediuk Adrian, - Prężyna Patryk, - Sanocka Barbara, - Strzałkowski Jacek, - Zawistowski Krzysztof, - Zielański Tomasz lider zespołu, kontakt: Nr tel , tomasz.zielanski@gmail.com 2. Opiekun projektu: dr inż. Damian Bereska. 3. Cel projektu. Celem projektu jest zaprojektowanie i zamodelowanie konstrukcji autonomicznego robota kroczącego typu hexapod w środowisku Sketchup z pluginem SketchyPhysics. W przyszłości planowane jest wykonanie konstrukcji i wyposażenie robota w kamerę wizyjną, moduł GPS oraz moduł łączności bezprzewodowej ze stanowiskiem decyzyjnym, implementacja trybów poruszania się po nierównym/sypkim podłożu, omijania/pokonywania przeszkód o określonej wysokości oraz przemieszczania się po poręczach i siatkach określonego typu. 4. Harmonogram realizacji projektu. Termin realizacji 5. Zadania Nauka obsługi środowiska Sketchup z pluginem SketchyPhysics Wykonanie wstępnego projektu mechanicznego Stworzenie modelu fizycznego. Nauka obsługi maszyn do wyrobu części konstrukcyjnych Rozliczenie 1. etapu projektu. Opis postępów prac. Każdy z członków zespołu był zobowiązany zapoznać się ze środowiskiem Sketchup i wtyczką SketchyPhysics przed rozpoczęciem kolejnych zadań, czyli do początku grudnia W tym okresie Barbara Sanocka zajmowała się również nauką języka Ruby, przydatnego w korzystaniu ze środowiska projektowego. W kolejnej części realizacji, zespół podzielił się na dwie grupy; Adrian Gniediuk i Jacek Strzałkowski otrzymali zadanie zaprojektowania nóg robota, pozostała część zespołu korpusu oraz połączenia obu projektów.


3 Wstępny projekt mechaniczny korpusu robota został ukończony na początku grudnia W trakcie tego miesiąca powstały dwie wersje projektu nóg, przekazane liderowi zespołu. Nie zostały w nich uwzględnione serwomechanizmy lub uniemożliwiały symulowanie ruchów robota. Osoby odpowiedzialne za wykonanie tej części zadania nie były w stanie poprawić bieżącej lub przedstawić nowej wersji, z powodu zbliżającej się sesji egzaminacyjnej, aż do zakończenia semestru. W związku z tym, projekt całości konstrukcji został wykonany przez pozostałą część zespołu na przełomie stycznia i lutego 2013, wtedy również zaczęto symulować ruchy robota. Symulowanie ruchów zostało osiągnięte w dwóch etapach. W pierwszym, została zaimplementowana możliwość ruchu poszczególnych części podczas symulacji. W kolejnym, stworzono możliwość zaprogramowania poszczególnych sekwencji ruchowych. Do tego celu napisano wtyczkę w języku Ruby. Nie jest możliwe ostateczne ukończenie projektu przed zakupem serwomechanizmów. Jest to spowodowane brakiem odpowiedniej dokumentacji technicznej orczyków uniemożliwia to zaprojektowanie połączeń z częściami ruchomymi serwomechanizmów. Wytworzenie zaprojektowanych części z zakupionych na ten cel płyt POM-C zostało w związku z tym przełożone do kolejnego etapu realizacji projektu. Poniżej przedstawione są zaprojektowane części oraz robot w trakcie symulacji.
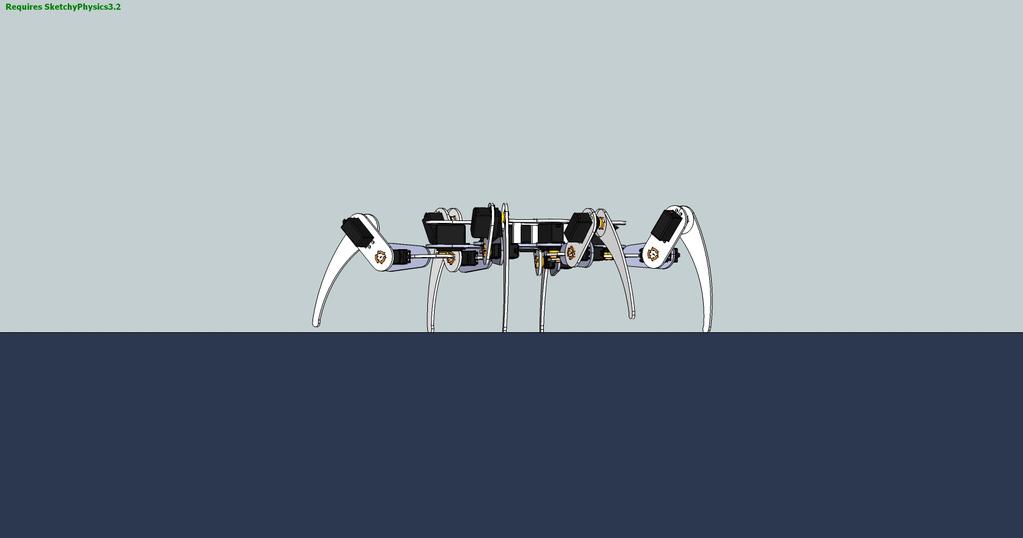

4
5 6. Problemy w realizacji. Z powodu pewnych problemów z organizacją pracy, podział zadań między członków zespołu został przeorganizowany, co pozwoliło na wykonanie zadań w terminie. Źródłem wielu utrudnień w realizacji projektu była praca z pluginem SketchyPhysics w środowisku Sketchup, którego niedopracowanie powodowało duże opóźnienia. Nieprzewidywalne błędy oprogramowania zmusiły zespół do kilkukrotnego wykonywania tych samych czynności. 7. Podsumowanie Pomimo opóźnień przy realizacji niektórych kamieni milowych, wszystkie zadania zostały wykonane przed upłynięciem końcowego terminu rozliczenia projektu. Wycięcie zaprojektowanych części z zakupionych płyt konstrukcyjnych zostało przełożone do kolejnego etapu realizacji, ze względu na brak możliwości dokładnego zaprojektowania połączeń z orczykami serwomechanizmów.
POKL /10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Dr hab. inż. Marek Pawełczyk, prof. nzw. w Politechnice Śląskiej Koordynator Projektu POKL.04.01.02-00-020/10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
dr hab. inż. Marek Pawełczyk, prof. Pol. Śl. Koordynator Projektu POKL /10
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy
 Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy Jakub Machnik, Michał Grycman, Mateusz Konieczny Politechnika Śląska, Gliwice, Polska
Sieciowe Sterowanie Robotem Przemysłowym KUKA KR3 Sprzężonego z Systemem Wizyjnym oraz Systemem Rozpoznawania Mowy Jakub Machnik, Michał Grycman, Mateusz Konieczny Politechnika Śląska, Gliwice, Polska
Naziemna stacja kontroli lotu GCS 2
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
RAPORT. Gryfów Śląski
 RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
RAPORT z realizacji projektu Opracowanie i rozwój systemu transportu fluidalnego w obróbce horyzontalnej elementów do układów fotogalwanicznych w zakresie zadań Projekt modelu systemu Projekt automatyki
SYLABUS/KARTA PRZEDMIOTU
 . NAZWA PRZEDMIOTU SYLABUS/KARTA PRZEDMIOTU Systemy wizyjne w automatyce przemysłowej. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek stopień tryb język status przedmiotu
. NAZWA PRZEDMIOTU SYLABUS/KARTA PRZEDMIOTU Systemy wizyjne w automatyce przemysłowej. NAZWA JEDNOSTKI PROWADZĄCEJ PRZEDMIOT Instytut Politechniczny. STUDIA kierunek stopień tryb język status przedmiotu
Politechnika Śląska Uczelnia przyjazna i prestiżowa. Stawiam na ludzi. Stawiam na rozwój
 Politechnika Śląska 2016-2020 Uczelnia przyjazna i prestiżowa. Stawiam na ludzi. Stawiam na rozwój Prof. dr hab. inż. Arkadiusz Mężyk Priorytety Ludzie Przyjazna atmosfera Rozwój i prestiż Transfer technologii
Politechnika Śląska 2016-2020 Uczelnia przyjazna i prestiżowa. Stawiam na ludzi. Stawiam na rozwój Prof. dr hab. inż. Arkadiusz Mężyk Priorytety Ludzie Przyjazna atmosfera Rozwój i prestiż Transfer technologii
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń
 Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Model symulacyjny robota Explorer 6WD z uwzględnieniem uszkodzeń inż. Paweł Stęczniewski Promotor: dr inż. Piotr Przystałka Instytut Podstaw Konstrukcji Maszyn Politechnika Śląska Gliwice, 22.11.2017 inż.
Harmonogram Dnia z mechatroniką podzielony został na 3 etapy, w których mogą wziąć udział 30- osobowe grupy.
 Opublikowano Politechnika Łódzka - Rekrutacja (https://rekrutacja.p.lodz.pl) Wydział Mechaniczny i Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki ul. B. Stefanowskiego 1/15 i 18/22 90-924
Opublikowano Politechnika Łódzka - Rekrutacja (https://rekrutacja.p.lodz.pl) Wydział Mechaniczny i Wydział Elektrotechniki, Elektroniki, Informatyki i Automatyki ul. B. Stefanowskiego 1/15 i 18/22 90-924
System wspomagania harmonogramowania przedsięwzięć budowlanych
 System wspomagania harmonogramowania przedsięwzięć budowlanych Wojciech Bożejko 1 Zdzisław Hejducki 2 Mariusz Uchroński 1 Mieczysław Wodecki 3 1 Instytut Informatyki, Automatyki i Robotyki Politechnika
System wspomagania harmonogramowania przedsięwzięć budowlanych Wojciech Bożejko 1 Zdzisław Hejducki 2 Mariusz Uchroński 1 Mieczysław Wodecki 3 1 Instytut Informatyki, Automatyki i Robotyki Politechnika
Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki opartej na wiedzy
 Regulamin przyznawania stypendium motywacyjnego dla studenta studiującego na kierunku zamawianym w ramach projektu Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki
Regulamin przyznawania stypendium motywacyjnego dla studenta studiującego na kierunku zamawianym w ramach projektu Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki
Sprawozdanie z realizacji projektu:
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.4.1.2--2/1 Program Operacyjny Kapitał
Manipulator OOO z systemem wizyjnym
 Studenckie Koło Naukowe Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska Manipulator OOO z systemem wizyjnym Raport z realizacji projektu Daniel Dreszer Kamil Gnacik Paweł
Studenckie Koło Naukowe Robotyki Encoder Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska Manipulator OOO z systemem wizyjnym Raport z realizacji projektu Daniel Dreszer Kamil Gnacik Paweł
r r r r.
 Harmonogram roku akademickiego 2017/2018 dla studiów stacjonarnych pierwszego oraz drugiego stopnia na Wydziałach: Budowy Maszyn i Informatyki; Inżynierii Materiałów, Budownictwa i Środowiska; Zarządzania
Harmonogram roku akademickiego 2017/2018 dla studiów stacjonarnych pierwszego oraz drugiego stopnia na Wydziałach: Budowy Maszyn i Informatyki; Inżynierii Materiałów, Budownictwa i Środowiska; Zarządzania
r r r r.
 Harmonogram roku akademickiego 2018/2019 dla studiów stacjonarnych pierwszego oraz drugiego stopnia na Wydziałach: Budowy Maszyn i Informatyki; Inżynierii Materiałów, Budownictwa i Środowiska; Zarządzania
Harmonogram roku akademickiego 2018/2019 dla studiów stacjonarnych pierwszego oraz drugiego stopnia na Wydziałach: Budowy Maszyn i Informatyki; Inżynierii Materiałów, Budownictwa i Środowiska; Zarządzania
Mechatronika. Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy:
 Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Technik Mechatronik Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu systemowym, które umożliwia
Naziemna stacja kontroli lotu GCS 2
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
POKL.04.01.02-00-020/10. Program Operacyjny Kapitał Ludzki współfinansowany przez Unię Europejską ze środków Europejskiego Funduszu Społecznego
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Automatyka i Robotyka studia stacjonarne drugiego stopnia
 #384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
#384 #380 dr inż. Mirosław Gajer Projekt i implementacja narzędzia do profilowania kodu natywnego przy wykorzystaniu narzędzi Android NDK (Project and implementation of tools for profiling native code
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Mechatronika studia I stopnia stacjonarne Rzeszów,12 Listopada 2014 1 Plan studiów z zaznaczeniem
Raport ewaluacyjny końcowy z realizacji szkoleń i praktyk zawodowych
 Raport ewaluacyjny końcowy z realizacji szkoleń i praktyk zawodowych Wszyscy uczestnicy szkoleń projektu Dolnośląski Nauczyciel Przyszłości finansowanego z środków Unii Europejskiej w ramach Priorytetu
Raport ewaluacyjny końcowy z realizacji szkoleń i praktyk zawodowych Wszyscy uczestnicy szkoleń projektu Dolnośląski Nauczyciel Przyszłości finansowanego z środków Unii Europejskiej w ramach Priorytetu
WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2014/2015
 Załącznik do Uchwały Nr XIX/160/13/14 WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2014/2015 1 1. Na studia doktoranckie może być przyjęta
Załącznik do Uchwały Nr XIX/160/13/14 WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2014/2015 1 1. Na studia doktoranckie może być przyjęta
Organizacja ostatniego semestru studiów I i II stopnia na studiach stacjonarnych i niestacjonarnych w roku akademickim 2016/2017 na Wydziale IEiK.
 Organizacja ostatniego semestru studiów I i II stopnia na studiach stacjonarnych i niestacjonarnych w roku akademickim 2016/2017 na Wydziale IEiK. Na studiach stacjonarnych I stopnia, ostatni, siódmy,
Organizacja ostatniego semestru studiów I i II stopnia na studiach stacjonarnych i niestacjonarnych w roku akademickim 2016/2017 na Wydziale IEiK. Na studiach stacjonarnych I stopnia, ostatni, siódmy,
mgr inż. Stefana Korolczuka
 Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Warszawa, 23 maja 2017 r. D z i e k a n a t Uprzejmie informuję, że na Wydziale Elektroniki i Technik Informacyjnych Politechniki Warszawskiej
Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Warszawa, 23 maja 2017 r. D z i e k a n a t Uprzejmie informuję, że na Wydziale Elektroniki i Technik Informacyjnych Politechniki Warszawskiej
Specjalność: Komputerowe systemy sterowania i diagnostyki. Strona 1 z 5
 Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
Uniwersytet Zielonogórski Plan studiów Wydział Informatyki, Elektrotechniki i Automatyki kierunek Automatyka i robotyka studia I stopnia, niestacjonarne rok akademicki 2017/18 Uwaga: zajęcia na specjalnościach
WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2015/2016
 Załącznik do Uchwały Nr XXVII/221/14/15 WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2015/2016 1 1. Na studia doktoranckie może być
Załącznik do Uchwały Nr XXVII/221/14/15 WARUNKI I TRYB REKRUTACJI KANDYDATÓW ORAZ FORMY STUDIÓW DOKTORANCKICH NA POLITECHNICE ŚLĄSKIEJ W ROKU AKADEMICKIM 2015/2016 1 1. Na studia doktoranckie może być
Autonomia robotów. Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska
 Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
Autonomia robotów Cezary Zieliński Instytut Automatyki i Informatyki Stosowanej Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska Wszechnica PAN 13 kwietnia 2016 r. Anatomia robota Receptory
PISMO OKÓLNE Nr 16/10/11 Rektora Politechniki Śląskiej z dnia 31 maja 2011 roku
 PISMO OKÓLNE Nr 16/10/11 Rektora Politechniki Śląskiej z dnia 31 maja 2011 roku w sprawie zasad przyjęć na studia doktoranckie na Politechnice Śląskiej w roku akademickim 2012/2013. Podaje się do wiadomości
PISMO OKÓLNE Nr 16/10/11 Rektora Politechniki Śląskiej z dnia 31 maja 2011 roku w sprawie zasad przyjęć na studia doktoranckie na Politechnice Śląskiej w roku akademickim 2012/2013. Podaje się do wiadomości
Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki opartej na wiedzy
 Regulamin przyznawania stypendium motywacyjnego dla studenta studiującego na kierunku zamawianym w ramach projektu Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki
Regulamin przyznawania stypendium motywacyjnego dla studenta studiującego na kierunku zamawianym w ramach projektu Wzrost liczby absolwentów Politechniki Wrocławskiej o kluczowym znaczeniu dla gospodarki
Technik Mechatronik. Kliknij, aby dodać tekst
 Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Technik Mechatronik Kliknij, aby dodać tekst Mechatronika Mechatronika jest to nauka łącząca elementy trzech różnych obszarów wiedzy: mechaniki, elektroniki, informatyki. Jest oparta na myśleniu i działaniu
Uniwersytet Śląski w Katowicach WYDZIAŁ MATEMATYKI, FIZYKI I CHEMII. Informatyka Stosowana. Studia stacjonarne I stopnia
 Uniwersytet Śląski w Katowicach WYDZIAŁ MATEMATYKI, FIZYKI I CHEMII Studia stacjonarne I stopnia Organizacja roku akademickiego 2017/2018 3,5-letnie studia pierwszego stopnia Semestr zimowy Zajęcia w semestrze
Uniwersytet Śląski w Katowicach WYDZIAŁ MATEMATYKI, FIZYKI I CHEMII Studia stacjonarne I stopnia Organizacja roku akademickiego 2017/2018 3,5-letnie studia pierwszego stopnia Semestr zimowy Zajęcia w semestrze
Biuro ds. projektu Program Rozwojowy Politechniki Warszawskiej
 1 Projekt: Zadanie: Program Rozwojowy Politechniki Warszawskiej 57 Staże długoterminowe Termin realizacji zadania: styczeń 2014 grudzień 2014 Koordynacja: Współfinansowanie: Biuro ds. projektu Program
1 Projekt: Zadanie: Program Rozwojowy Politechniki Warszawskiej 57 Staże długoterminowe Termin realizacji zadania: styczeń 2014 grudzień 2014 Koordynacja: Współfinansowanie: Biuro ds. projektu Program
I. ZASADY OGÓLNE. Projekty współfinansowane ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 Regulamin przyznawania stypendium motywacyjnego dla studentów/ek studiujących na kierunkach zamawianych uruchomionych w roku akademickim 2012/2013 na Wydziale Mechanicznym Politechniki Wrocławskiej Stypendia
Regulamin przyznawania stypendium motywacyjnego dla studentów/ek studiujących na kierunkach zamawianych uruchomionych w roku akademickim 2012/2013 na Wydziale Mechanicznym Politechniki Wrocławskiej Stypendia
PISMO OKÓLNE Nr 28/15/16 Rektora Politechniki Śląskiej z dnia 21 marca 2016 roku
 PISMO OKÓLNE Nr 28/15/16 Rektora Politechniki Śląskiej z dnia 21 marca 2016 roku w sprawie warunków i trybu rekrutacji kandydatów oraz formy studiów doktoranckich na Politechnice Śląskiej w roku akademickim
PISMO OKÓLNE Nr 28/15/16 Rektora Politechniki Śląskiej z dnia 21 marca 2016 roku w sprawie warunków i trybu rekrutacji kandydatów oraz formy studiów doktoranckich na Politechnice Śląskiej w roku akademickim
PISMO OKÓLNE Nr 23/09/10 Rektora Politechniki Śląskiej z dnia 31 maja 2010 roku
 PISMO OKÓLNE Nr 23/09/10 Rektora Politechniki Śląskiej z dnia 31 maja 2010 roku w sprawie zasad przyjęć na studia doktoranckie na Politechnice Śląskiej w roku akademickim 2011/2012. Podaje się do wiadomości
PISMO OKÓLNE Nr 23/09/10 Rektora Politechniki Śląskiej z dnia 31 maja 2010 roku w sprawie zasad przyjęć na studia doktoranckie na Politechnice Śląskiej w roku akademickim 2011/2012. Podaje się do wiadomości
FIRMY BIORĄCE UDZIAŁ W STAŻACH STUDENCKICH
 FIRMY BIORĄCE UDZIAŁ W STAŻACH STUDENCKICH Zadanie 11 - Współpraca uczelni z pracodawcami w zakresie wzmocnienia praktycznych elementów nauczania (staże i praktyki studenckie) Beiersdorf Manufacturing
FIRMY BIORĄCE UDZIAŁ W STAŻACH STUDENCKICH Zadanie 11 - Współpraca uczelni z pracodawcami w zakresie wzmocnienia praktycznych elementów nauczania (staże i praktyki studenckie) Beiersdorf Manufacturing
WYNIKI ANKIETYZACJI ABSOLWENTÓW WEAiI W LATACH
 WYNIKI ANKIETYZACJI ABSOLWENTÓW WEAiI W LATACH 2009-2012 1. KIERUNEK AUTOMATYKA I ROBOTYKA 2. KIERUNEK ELEKTRONIKA I TELEKOMUNIKACJA 3. KIERUNEK ELEKTROTECHNIKA 4. KIERUNEK INFORMATYKA Opracowanie wyników:
WYNIKI ANKIETYZACJI ABSOLWENTÓW WEAiI W LATACH 2009-2012 1. KIERUNEK AUTOMATYKA I ROBOTYKA 2. KIERUNEK ELEKTRONIKA I TELEKOMUNIKACJA 3. KIERUNEK ELEKTROTECHNIKA 4. KIERUNEK INFORMATYKA Opracowanie wyników:
Starostwo Powiatowe w Rypinie, 20 kwietnia 2015 roku
 Projekty realizowane przez Powiat Rypiński Dobry Zawód Lepszy Start Działanie 9.2 POKL, wartość projektu 2 748 754,05 zł, dofinansowanie 2 336 440,94 zł. Pogłębiaj wiedzę, rozwijaj umiejętności, poznaj
Projekty realizowane przez Powiat Rypiński Dobry Zawód Lepszy Start Działanie 9.2 POKL, wartość projektu 2 748 754,05 zł, dofinansowanie 2 336 440,94 zł. Pogłębiaj wiedzę, rozwijaj umiejętności, poznaj
Naukowe Koło Nowoczesnych Technologii
 Naukowe Koło Nowoczesnych Technologii Naukowe Koło Nowoczesnych Technologii Opiekun: dr hab., prof. ndzw. Tadeusz Szumiata Przewodniczący: Mateusz Staszewski, MiBM semestr IV Poszczególne dziedziny działań
Naukowe Koło Nowoczesnych Technologii Naukowe Koło Nowoczesnych Technologii Opiekun: dr hab., prof. ndzw. Tadeusz Szumiata Przewodniczący: Mateusz Staszewski, MiBM semestr IV Poszczególne dziedziny działań
Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy
 Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Rozszerzony konspekt przedmiotu Inteligentne maszyny i systemy dr inż. Witold Czajewski dr inż. Marcin Iwanowski
WIZUALIZACJA I STEROWANIE ROBOTEM
 Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
Maciej Wochal, Opiekun koła: Dr inż. Dawid Cekus Politechnika Częstochowska, Wydział Inżynierii Mechanicznej i Informatyki, Instytut Mechaniki i Podstaw Konstrukcji Maszyn, Koło Naukowe Komputerowego Projektowania
UCHWAŁA nr VIII/79/16/17 Senatu Politechniki Śląskiej z dnia 24 kwietnia 2017 roku
 UCHWAŁA nr VIII/79/16/17 Senatu Politechniki Śląskiej z dnia 24 kwietnia 2017 roku w sprawie warunków i trybu rekrutacji na studiach doktoranckich oraz ich formy w roku akademickim 2017/2018 Na podstawie
UCHWAŁA nr VIII/79/16/17 Senatu Politechniki Śląskiej z dnia 24 kwietnia 2017 roku w sprawie warunków i trybu rekrutacji na studiach doktoranckich oraz ich formy w roku akademickim 2017/2018 Na podstawie
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Rodzaj studiów: stacjonarne Specjalność: Mechatronika stosowana Katedra: Mechaniki i Mechatroniki Opracowanie koncepcji systemu sterowania (nawigacji i komunikacji) dwu-zadaniowego nawodno-podwodnego bezzałogowego
Rodzaj studiów: stacjonarne Specjalność: Mechatronika stosowana Katedra: Mechaniki i Mechatroniki Opracowanie koncepcji systemu sterowania (nawigacji i komunikacji) dwu-zadaniowego nawodno-podwodnego bezzałogowego
w dyscyplinie: Automatyka i Robotyka, studia stacjonarne
 P O L I T E C H N I K A Ś L Ą S K A WYDZIAŁ AUTOMATYKI, ELEKTRONIKI I INFORMATYKI DZIEKAN UL. AKADEMICKA 16 44-100 GLIWICE T: +48 32 237 13 10 T: +48 32 237 24 13 F: +48 32 237 24 13 Dziekan_aei@polsl.pl
P O L I T E C H N I K A Ś L Ą S K A WYDZIAŁ AUTOMATYKI, ELEKTRONIKI I INFORMATYKI DZIEKAN UL. AKADEMICKA 16 44-100 GLIWICE T: +48 32 237 13 10 T: +48 32 237 24 13 F: +48 32 237 24 13 Dziekan_aei@polsl.pl
Zarządzenie Nr 921/2014/2015 Rektora Akademii Techniczno-Humanistycznej z dnia 30 czerwca 2015 roku
 Zarządzenie Nr 921/2014/2015 w sprawie harmonogramu roku akademickiego 2015/2016 dla studiów stacjonarnych oraz niestacjonarnych pierwszego i drugiego stopnia Działając na podstawie art. 66 ustawy z dnia
Zarządzenie Nr 921/2014/2015 w sprawie harmonogramu roku akademickiego 2015/2016 dla studiów stacjonarnych oraz niestacjonarnych pierwszego i drugiego stopnia Działając na podstawie art. 66 ustawy z dnia
Szkolenie Podstawy Zarządzania Projektami Informator
 Projekt Informatyka inwestycją w przyszłość współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Szkolenie Podstawy Zarządzania Projektami Informator Spis treści Informacje
Projekt Informatyka inwestycją w przyszłość współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Szkolenie Podstawy Zarządzania Projektami Informator Spis treści Informacje
Nowe możliwości rozwoju biur karier w praktyce- Program Operacyjny Kapitał Ludzki projekt:
 Nowe możliwości rozwoju biur karier w praktyce- Program Operacyjny Kapitał Ludzki projekt: Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią, nowoczesna
Nowe możliwości rozwoju biur karier w praktyce- Program Operacyjny Kapitał Ludzki projekt: Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią, nowoczesna
Zarządzenie Nr 1040/2015/2016 Rektora Akademii Techniczno-Humanistycznej z dnia 29 czerwca 2016 roku
 Zarządzenie Nr 1040/2015/2016 w sprawie harmonogramu roku akademickiego 2016/2017 dla studiów stacjonarnych oraz niestacjonarnych pierwszego i drugiego stopnia Działając na podstawie art. 66 ustawy z dnia
Zarządzenie Nr 1040/2015/2016 w sprawie harmonogramu roku akademickiego 2016/2017 dla studiów stacjonarnych oraz niestacjonarnych pierwszego i drugiego stopnia Działając na podstawie art. 66 ustawy z dnia
RAPORT Z REALIZACJI PROJEKTU WYKONANIA RAMY NOŚNEJ BATYSKAFU, AUTONOMICZNEGO SYSTEMU STEROWANIA I IDENTYFIKACJI OBIEKTÓW PODWODNYCH
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatki, Elektroniki i Informatyki Politechniki Śląskiej POKL. 04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatki, Elektroniki i Informatyki Politechniki Śląskiej POKL. 04.01.02-00-020/10 Program Operacyjny
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
Nazwa przedmiotu: PROGRAMOWANIE ROBOTÓW Programming of robots Kierunek: MECHATRONIKA Rodzaj przedmiotu: obowiązkowy na specjalności: SYSTEMY STEROWANIA, Rodzaj zajęć: wykład, laboratorium Forma studiów:
PROGRAM NAUCZANIA PRZEDMIOTU OBOWIĄZKOWEGO NA WYDZIALE LEKARSKIM I ROK AKADEMICKI 2017/2018 PRZEWODNIK DYDAKTYCZNY dla STUDENTÓW I ROKU STUDIÓW
 PROGRAM NAUCZANIA PRZEDMIOTU OBOWIĄZKOWEGO NA WYDZIALE LEKARSKIM I ROK AKADEMICKI 2017/2018 PRZEWODNIK DYDAKTYCZNY dla STUDENTÓW I ROKU STUDIÓW 1. NAZWA PRZEDMIOTU (modułu): Biomateriały w medycynie 2.
PROGRAM NAUCZANIA PRZEDMIOTU OBOWIĄZKOWEGO NA WYDZIALE LEKARSKIM I ROK AKADEMICKI 2017/2018 PRZEWODNIK DYDAKTYCZNY dla STUDENTÓW I ROKU STUDIÓW 1. NAZWA PRZEDMIOTU (modułu): Biomateriały w medycynie 2.
Informatyka studia stacjonarne pierwszego stopnia
 #382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
#382 #379 Internetowy system obsługi usterek w sieciach handlowych (The internet systems of detection of defects in trade networks) Celem pracy jest napisanie aplikacji w języku Java EE. Główne zadania
RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ
 aut. Maksymilian Dura 15.10.2018 RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ Jednym z najbardziej oryginalnych rozwiązań tegorocznego Międzynarodowego Salonu Przemysłu Obronnego w Kielcach były prezentowane przez
aut. Maksymilian Dura 15.10.2018 RYBY-ROBOTY POLSKĄ SPECJALNOŚCIĄ Jednym z najbardziej oryginalnych rozwiązań tegorocznego Międzynarodowego Salonu Przemysłu Obronnego w Kielcach były prezentowane przez
Podstawy robotyki wykład I. Wprowadzenie Robot i jego historia
 Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Podstawy robotyki Wykład I Wprowadzenie Robert Muszyński Janusz Jakubiak Instytut Informatyki, Automatyki i Robotyki Politechnika Wrocławska Kamienie milowe robotyki 1947 pierwszy teleoperator sterowany
Polska-Warszawa: Sprzęt laboratoryjny, optyczny i precyzyjny (z wyjątkiem szklanego) 2015/S
 2015/S") 1/5 Niniejsze ogłoszenie w witrynie TED: http://ted.europa.eu/udl?uri=ted:notice:204035-2015:text:pl:html Polska-Warszawa: Sprzęt laboratoryjny, optyczny i precyzyjny (z wyjątkiem szklanego) 2015/S 113-204035
1/5 Niniejsze ogłoszenie w witrynie TED: http://ted.europa.eu/udl?uri=ted:notice:204035-2015:text:pl:html Polska-Warszawa: Sprzęt laboratoryjny, optyczny i precyzyjny (z wyjątkiem szklanego) 2015/S 113-204035
Projektowanie i druk 3D
 Projektowanie i druk 3D WSB Wrocław - Studia podyplomowe Opis kierunku Projektowanie i druk 3D - studia w WSB we Wrocławiu Druk 3D to technika wytwarzania zyskująca coraz większą popularność, zarówno w
Projektowanie i druk 3D WSB Wrocław - Studia podyplomowe Opis kierunku Projektowanie i druk 3D - studia w WSB we Wrocławiu Druk 3D to technika wytwarzania zyskująca coraz większą popularność, zarówno w
Regulamin specjalistycznego Kursu programowania FPGA (Field Programmable Gate Arrays),
,") Regulamin specjalistycznego Kursu programowania FPGA (Field Programmable Gate Arrays), dla studentów kierunku INFORMATYKA na Wydziale Inżynierii Elektrycznej i Komputerowej Politechniki Krakowskiej, uczestniczących
Regulamin specjalistycznego Kursu programowania FPGA (Field Programmable Gate Arrays), dla studentów kierunku INFORMATYKA na Wydziale Inżynierii Elektrycznej i Komputerowej Politechniki Krakowskiej, uczestniczących
a Panią/Panem... zamieszkałą/ym w,
 UMOWA STAŻOWA NR FSD-4/RIE5/S/2015/ W ramach projektu: Nowoczesne kadry dla nowoczesnej energetyki Nr POKL.04.01.02-00-130/12 Realizowanego w ramach Programu Operacyjnego Kapitał Ludzki Działanie 4.1.
UMOWA STAŻOWA NR FSD-4/RIE5/S/2015/ W ramach projektu: Nowoczesne kadry dla nowoczesnej energetyki Nr POKL.04.01.02-00-130/12 Realizowanego w ramach Programu Operacyjnego Kapitał Ludzki Działanie 4.1.
HARMONOGRAM GODZINOWY ORAZ PUNKTACJA ECTS CZTEROLETNIEGO STUDIUM DOKTORANCKIEGO
 P O L I T E C H N I K A WYDZIAŁ AUTOMATYKI, ELEKTRONIKI I INFORMATYKI DZIEKAN Ś L Ą S K A UL. AKADEMICKA 16 44-100 GLIWICE T: +48 32 237 13 10 T: +48 32 237 24 13 F: +48 32 237 24 13 Dziekan_aei@polsl.pl
P O L I T E C H N I K A WYDZIAŁ AUTOMATYKI, ELEKTRONIKI I INFORMATYKI DZIEKAN Ś L Ą S K A UL. AKADEMICKA 16 44-100 GLIWICE T: +48 32 237 13 10 T: +48 32 237 24 13 F: +48 32 237 24 13 Dziekan_aei@polsl.pl
Praktyka zawodowa. Automatyka i Robotyka I stopień (I stopień / II stopień) Ogólnoakademicki (ogólno akademicki / praktyczny)
 Ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Practice Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr../12 z dnia.... 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Practice Obowiązuje od roku akademickiego 2013/2014
OPROGRAMOWANIE WSPOMAGAJĄCE ZARZĄDZANIE PROJEKTAMI. PLANOWANIE ZADAŃ I HARMONOGRAMÓW. WYKRESY GANTTA
 OPROGRAMOWANIE WSPOMAGAJĄCE ZARZĄDZANIE PROJEKTAMI. PLANOWANIE ZADAŃ I HARMONOGRAMÓW. WYKRESY GANTTA Projekt to metoda na osiągnięcie celów organizacyjnych. Jest to zbiór powiązanych ze sobą, zmierzających
OPROGRAMOWANIE WSPOMAGAJĄCE ZARZĄDZANIE PROJEKTAMI. PLANOWANIE ZADAŃ I HARMONOGRAMÓW. WYKRESY GANTTA Projekt to metoda na osiągnięcie celów organizacyjnych. Jest to zbiór powiązanych ze sobą, zmierzających
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu
 INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
INSTYTUT NAUK TECHNICZNYCH PWSW w Przemyślu PROGRAM STUDIÓW KIERUNEK: Mechatronika profil praktyczny Specjalność I: Projektowanie systemów mechatronicznych Specjalność II: Mechatronika samochodowa (cykl
DOKUMENTACJA SYSTEMU ZAPEWNIANIA JAKOŚCI KSZTAŁCENIA. Politechnika Śląska/Kolegium Pedagogiczne Politechniki Śląskiej
 DOKUMENTACJA SYSTEMU ZAPEWNIANIA JAKOŚCI KSZTAŁCENIA Politechnika Śląska/Kolegium Pedagogiczne DOKUMENTACJA UCZELNIANA DOKUMENTACJA WYDZIAŁOWA Uczelniana Księga Jakości Kształcenia 1. Prezentacja Uczelni
DOKUMENTACJA SYSTEMU ZAPEWNIANIA JAKOŚCI KSZTAŁCENIA Politechnika Śląska/Kolegium Pedagogiczne DOKUMENTACJA UCZELNIANA DOKUMENTACJA WYDZIAŁOWA Uczelniana Księga Jakości Kształcenia 1. Prezentacja Uczelni
EAIiIB - Automatyka i Robotyka - opis kierunku 1 / 5
 EAIiIB Automatyka i Robotyka opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji
EAIiIB Automatyka i Robotyka opis kierunku 1 / 5 Warunki rekrutacji na studia Wymagania wstępne i dodatkowe: Warunkiem przystąpienia do rekrutacji na studia drugiego stopnia jest posiadanie kwalifikacji
WZÓR. UMOWA o STAŻ nr POKL/.. /2014 dla studenta kierunku zamawianego Inżynieria Środowiska PŁ
 WZÓR UMOWA o STAŻ nr POKL/.. /2014 dla studenta kierunku zamawianego Inżynieria Środowiska PŁ w ramach projektu pt.: Inżynieria Środowiska inwestycją w przyszłość współfinansowanego przez Unię Europejską
WZÓR UMOWA o STAŻ nr POKL/.. /2014 dla studenta kierunku zamawianego Inżynieria Środowiska PŁ w ramach projektu pt.: Inżynieria Środowiska inwestycją w przyszłość współfinansowanego przez Unię Europejską
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
"Z A T W I E R D Z A M prof. dr hab. inż. Radosław TRĘBIŃSKI Dziekan Wydziału Mechatroniki i Lotnictwa Warszawa, dnia... NAZWA PRZEDMIOTU: Wersja anglojęzyczna: Kod przedmiotu: S Y L A B U S P R Z E D
Uniwersytet Śląski w Katowicach, ul. Bankowa 12, Katowice, Zaproszenie
 Zaproszenie do składania ofert, na stanowisko Programista System wizualizacji Projektu, z zastosowaniem zamówień, których wartość nie przekracza wyrażonej w złotych równowartości kwoty, określonej w art.
Zaproszenie do składania ofert, na stanowisko Programista System wizualizacji Projektu, z zastosowaniem zamówień, których wartość nie przekracza wyrażonej w złotych równowartości kwoty, określonej w art.
Osoby zainteresowane udziałem w projekcie prosimy o kontaktowanie się Ośrodkiem Pomocy Społecznej w Pokrzywnicy.
 systemowego w ramach Programu Operacyjnego Kapitał Ludzki 7.1.1 jest współfinansowany przez Unię Europejska w ramach Europejskiego Funduszu Społecznego systemowego w ramach Programu Operacyjnego Kapitał
systemowego w ramach Programu Operacyjnego Kapitał Ludzki 7.1.1 jest współfinansowany przez Unię Europejska w ramach Europejskiego Funduszu Społecznego systemowego w ramach Programu Operacyjnego Kapitał
Etapy życia oprogramowania
 Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 w prezentacji wykorzystano również materiały przygotowane przez Michała Kolano
Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 w prezentacji wykorzystano również materiały przygotowane przez Michała Kolano
POKL /10. Program Operacyjny Kapitał Ludzki współfinansowany przez Unię Europejską ze środków Europejskiego Funduszu Społecznego
 Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Wiedza i doświadczenie projektowe wizytówką absolwenta kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej POKL.04.01.02-00-020/10 Program Operacyjny
Dokumentacja programu kształcenia dla kierunku studiów Inżynieria biomedyczna Studia I stopnia, stacjonarne
 Dokumentacja programu kształcenia dla kierunku studiów Inżynieria biomedyczna Studia I stopnia, stacjonarne Lublin 2017 I. Ogólna charakterystyka tworzonych studiów: 1) Nazwa kierunku studiów: inżynieria
Dokumentacja programu kształcenia dla kierunku studiów Inżynieria biomedyczna Studia I stopnia, stacjonarne Lublin 2017 I. Ogólna charakterystyka tworzonych studiów: 1) Nazwa kierunku studiów: inżynieria
REGULAMIN KOMUNIKACJI W PROJEKCIE
 Załącznik nr 1 do Zarządzenia nr 89/2014 Burmistrza Miasta i Gminy Prusice z dnia 30.05.2014 roku REGULAMIN KOMUNIKACJI W PROJEKCIE pt. Rozwój e-urzędów w 8 JST województwa dolnośląskiego (POKL.05.02.01-00-036/13)
Załącznik nr 1 do Zarządzenia nr 89/2014 Burmistrza Miasta i Gminy Prusice z dnia 30.05.2014 roku REGULAMIN KOMUNIKACJI W PROJEKCIE pt. Rozwój e-urzędów w 8 JST województwa dolnośląskiego (POKL.05.02.01-00-036/13)
E-1IZ3-06-s6. Inżynieria Programowania. Informatyka. I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-1IZ3-06-s6 Nazwa modułu Inżynieria Programowania Nazwa modułu w języku angielskim Software Engineering Obowiązuje od roku akademickiego 2012/2013 (aktualizacja
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-1IZ3-06-s6 Nazwa modułu Inżynieria Programowania Nazwa modułu w języku angielskim Software Engineering Obowiązuje od roku akademickiego 2012/2013 (aktualizacja
Studenckie Koło Naukowe Controllers
 Studenckie Koło Naukowe Controllers Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Kraków, 16.03.2015 O nas Studenckie Koło Naukowe Controllers działa przy Katedrze Automatyzacji
Studenckie Koło Naukowe Controllers Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Kraków, 16.03.2015 O nas Studenckie Koło Naukowe Controllers działa przy Katedrze Automatyzacji
Biuro ds. projektu Program Rozwojowy Politechniki Warszawskiej
 24.04.2014 r. 1 Projekt: Zadanie: Program Rozwojowy Politechniki Warszawskiej 57 Staże długoterminowe Termin realizacji zadania: styczeń 2014 grudzień 2014 Koordynacja: Współfinansowanie: Biuro ds. projektu
24.04.2014 r. 1 Projekt: Zadanie: Program Rozwojowy Politechniki Warszawskiej 57 Staże długoterminowe Termin realizacji zadania: styczeń 2014 grudzień 2014 Koordynacja: Współfinansowanie: Biuro ds. projektu
Etapy życia oprogramowania. Modele cyklu życia projektu. Etapy życia oprogramowania. Etapy życia oprogramowania
 Etapy życia oprogramowania Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 Określenie wymagań Testowanie Pielęgnacja Faza strategiczna
Etapy życia oprogramowania Modele cyklu życia projektu informatycznego Organizacja i Zarządzanie Projektem Informatycznym Jarosław Francik marzec 23 Określenie wymagań Testowanie Pielęgnacja Faza strategiczna
PRZEWODNIK PO PRZEDMIOCIE
 Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Nazwa przedmiotu: Kierunek: Mechanika i Budowa Maszyn Rodzaj przedmiotu: obowiązkowy na specjalności APWiR Rodzaj zajęć: wykład, laboratorium I KARTA PRZEDMIOTU CEL PRZEDMIOTU PRZEWODNIK PO PRZEDMIOCIE
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Studenckie Koła Naukowe - WIEiK
 Studenckie Koła Naukowe - WIEiK Przegląd działalności Studenckich Kół Naukowych na Wydziale Inżynierii Elektrycznej i Komputerowej za rok akademicki 2015/2016 Wydział Inżynierii Elektrycznej i Komputerowej
Studenckie Koła Naukowe - WIEiK Przegląd działalności Studenckich Kół Naukowych na Wydziale Inżynierii Elektrycznej i Komputerowej za rok akademicki 2015/2016 Wydział Inżynierii Elektrycznej i Komputerowej
MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM 200
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-15 MODELOWANIE I SYMULACJA UKŁADÓW PNEUMATYCZNYCH, HYDRAULICZNYCH I ELEKTRYCZNYCH za pomocą programu komputerowego AUTOSIM
Systemy Informatyki Przemysłowej
 Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
Systemy Informatyki Przemysłowej Profil absolwenta Profil absolwenta Realizowany cel dydaktyczny związany jest z: tworzeniem, wdrażaniem oraz integracją systemów informatycznych algorytmami rozpoznawania
KIERUNKI ZAMAWIANE NA WYDZIALE MECHANICZNYM POLITECHNIKI WROCŁAWSKIEJ
 KIERUNKI ZAMAWIANE NA WYDZIALE MECHANICZNYM POLITECHNIKI WROCŁAWSKIEJ zasady uczestnictwa w projekcie Kierunki zamawiane co to oznacza? Narodowe Centrum Badań i Rozwoju jednostka wykonawcza Ministerstwa
KIERUNKI ZAMAWIANE NA WYDZIALE MECHANICZNYM POLITECHNIKI WROCŁAWSKIEJ zasady uczestnictwa w projekcie Kierunki zamawiane co to oznacza? Narodowe Centrum Badań i Rozwoju jednostka wykonawcza Ministerstwa
Uchwała Nr 23/2018/III Senatu Politechniki Lubelskiej z dnia 19 kwietnia 2018 r.
 Uchwała Nr 23/2018/III Senatu Politechniki Lubelskiej z dnia 19 kwietnia 2018 r. w sprawie warunków i trybu rekrutacji na studia doktoranckie w roku akademickim 2018/2019 Na podstawie art. 196 ust. 2 ustawy
Uchwała Nr 23/2018/III Senatu Politechniki Lubelskiej z dnia 19 kwietnia 2018 r. w sprawie warunków i trybu rekrutacji na studia doktoranckie w roku akademickim 2018/2019 Na podstawie art. 196 ust. 2 ustawy
Technik Mechatronik. na podbudowie gimnazjum. Programowaine sterowników PLC
 Technik Mechatronik na podbudowie gimnazjum Programowaine sterowników PLC Technik Mechatronik Projektuje części oraz zespoły maszyn i urządzeń mechanicznych z wykorzystaniem technik komputerowych; wykorzystuje
Technik Mechatronik na podbudowie gimnazjum Programowaine sterowników PLC Technik Mechatronik Projektuje części oraz zespoły maszyn i urządzeń mechanicznych z wykorzystaniem technik komputerowych; wykorzystuje
Regulamin przyznawania i wypłacania stypendium motywacyjnego na kierunku zamawianym w ramach projektu POKL Kierunek unikatowy ANALITYKA GOSPODARCZA
 Regulamin przyznawania i wypłacania stypendium motywacyjnego na kierunku zamawianym w ramach projektu POKL Kierunek unikatowy ANALITYKA GOSPODARCZA 1 Definicje 1. Na potrzeby niniejszego regulaminu przyjmuje
Regulamin przyznawania i wypłacania stypendium motywacyjnego na kierunku zamawianym w ramach projektu POKL Kierunek unikatowy ANALITYKA GOSPODARCZA 1 Definicje 1. Na potrzeby niniejszego regulaminu przyjmuje
Politechniczny Uniwersytet Dzieci
 Centrum Pedagogiki i Psychologii Politechniczny Uniwersytet Dzieci Program ramowy dr Marian Piekarski mgr Anna Cygan mgr Małgorzata Rakoczy Kraków, wrzesień 2017 1 Spis treści 1. Założenia organizacyjne
Centrum Pedagogiki i Psychologii Politechniczny Uniwersytet Dzieci Program ramowy dr Marian Piekarski mgr Anna Cygan mgr Małgorzata Rakoczy Kraków, wrzesień 2017 1 Spis treści 1. Założenia organizacyjne
Overlord - Software Development Plan
 Overlord - Software Development Plan Jakub Gołębiowski Adam Kawa Piotr Krewski Tomasz Weksej 5 czerwca 2006 Spis treści 0.1 Cel.......................................... 4 0.2 Zakres........................................
Overlord - Software Development Plan Jakub Gołębiowski Adam Kawa Piotr Krewski Tomasz Weksej 5 czerwca 2006 Spis treści 0.1 Cel.......................................... 4 0.2 Zakres........................................
Wydział Nauk o Środowisku
 Wydział Nauk o Środowisku Raport z działalności Wydziałowego Systemu Zarządzania Jakością Kształcenia Ewa Paturej Rada Wydziału 05.07.13 Decyzja Nr 7/2012 Dziekana Wydziału Ochrony Środowiska i Rybactwa
Wydział Nauk o Środowisku Raport z działalności Wydziałowego Systemu Zarządzania Jakością Kształcenia Ewa Paturej Rada Wydziału 05.07.13 Decyzja Nr 7/2012 Dziekana Wydziału Ochrony Środowiska i Rybactwa
S Y L A B U S P R Z E D M I O T U
 "Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki i Lotnictwa prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: KOMPUTEROWA ANALIZA KONSTRUKCJI
"Z A T W I E R D Z A M" Dziekan Wydziału Mechatroniki i Lotnictwa prof. dr hab. inż. Radosław TRĘBIŃSKI Warszawa, dnia... S Y L A B U S P R Z E D M I O T U NAZWA PRZEDMIOTU: KOMPUTEROWA ANALIZA KONSTRUKCJI
Katedra Systemów i Sieci Radiokomunikacyjnych
 Prof. dr hab. inż. Ryszard KATULSKI, prof. nadzw. PG kierownik katedry Specjalność na studiach 2 stopnia Systemy i sieci radiokomunikacyjne (SiSR) prowadzona w j. polskim i j. angielskim w Katedrze Systemów
Prof. dr hab. inż. Ryszard KATULSKI, prof. nadzw. PG kierownik katedry Specjalność na studiach 2 stopnia Systemy i sieci radiokomunikacyjne (SiSR) prowadzona w j. polskim i j. angielskim w Katedrze Systemów
Projekt Czas inżynierów II studia zamawiane na Politechnice Opolskiej (3WEAiI)
") Załącznik do zarządzenia nr 29/2014 Rektora PO REGULAMIN ODBYWANIA TRZYMIESIĘCZNYCH STAŻY W PRZEDSIĘBIORSTWACH DLA STUDENTÓW WYDZIAŁU ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI W RAMACH PROJEKTU,,CZAS INŻYNIERÓW
Załącznik do zarządzenia nr 29/2014 Rektora PO REGULAMIN ODBYWANIA TRZYMIESIĘCZNYCH STAŻY W PRZEDSIĘBIORSTWACH DLA STUDENTÓW WYDZIAŁU ELEKTROTECHNIKI, AUTOMATYKI I INFORMATYKI W RAMACH PROJEKTU,,CZAS INŻYNIERÓW
Zaproszenie do składania ofert na prowadzenie zajęć z uczniami kl. IV-V Zespołu Szkół w Bytomiu Odrzań
 Ogłoszenie zaproszenie do składania ofert na prowadzenie zajęć z uczniami kl. IV-V Zespołu Szkół w Bytomiu Odrzańskim w Szkole Podstawowej w ramach Projektu W ogrodzie cudów. Poddziałanie 9.1.2. Wyrównywanie
Ogłoszenie zaproszenie do składania ofert na prowadzenie zajęć z uczniami kl. IV-V Zespołu Szkół w Bytomiu Odrzańskim w Szkole Podstawowej w ramach Projektu W ogrodzie cudów. Poddziałanie 9.1.2. Wyrównywanie
Monitor Prawny Politechniki Śląskiej
 Monitor Prawny Politechniki Śląskiej poz. 88 UCHWAŁA NR 26/2018 SENATU POLITECHNIKI ŚLĄSKIEJ z dnia 23 kwietnia 2018 r. w sprawie warunków i trybu rekrutacji na studia doktoranckie oraz ich formy w roku
Monitor Prawny Politechniki Śląskiej poz. 88 UCHWAŁA NR 26/2018 SENATU POLITECHNIKI ŚLĄSKIEJ z dnia 23 kwietnia 2018 r. w sprawie warunków i trybu rekrutacji na studia doktoranckie oraz ich formy w roku
elplc Sp. z o.o. ul. Warsztatowa 5, 33-100 Tarnów tel./fax: +48 14 623 04 19 sekretariat@elplc.pl www.elplc.pl
 OFERTA STAŻU / PRAKTYKI - Programista C# / Visual Studio 2010 / Visual Studio 2013 Osoba na tym stanowisku będzie tworzyć aplikacje w środowisku MS Visual Studio 2010/2013 (C#). 1. Wykształcenie wyższe
OFERTA STAŻU / PRAKTYKI - Programista C# / Visual Studio 2010 / Visual Studio 2013 Osoba na tym stanowisku będzie tworzyć aplikacje w środowisku MS Visual Studio 2010/2013 (C#). 1. Wykształcenie wyższe
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego. Regulamin
 Regulamin przyznawania doktoranckich stypendiów naukowych oraz stypendiów stażowych dla młodych doktorów (wprowadzony Zarządzeniem Rektora z dnia 28. 01. 2010 r. Nr 6/2010) przyznawanych ze środków projektu
Regulamin przyznawania doktoranckich stypendiów naukowych oraz stypendiów stażowych dla młodych doktorów (wprowadzony Zarządzeniem Rektora z dnia 28. 01. 2010 r. Nr 6/2010) przyznawanych ze środków projektu
ZAPYTANIE OFERTOWE NR RIKE/1/2017
 ZAPYTANIE OFERTOWE NR RIKE/1/2017 w ramach planowanego do realizacji projektu pn.: Opracowanie robota do inspekcji pyłowych kotłów energetycznych, w ramach Działania 1.2: Sektorowe programy B+R, współfinansowanego
ZAPYTANIE OFERTOWE NR RIKE/1/2017 w ramach planowanego do realizacji projektu pn.: Opracowanie robota do inspekcji pyłowych kotłów energetycznych, w ramach Działania 1.2: Sektorowe programy B+R, współfinansowanego
VI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne - relacja
 VI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne - relacja W dniu 21.08.2015 odbyło się VI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
VI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe i algorytmy numeryczne - relacja W dniu 21.08.2015 odbyło się VI Seminarium Naukowe Tomografia procesowa aplikacje, systemy pomiarowe
I. ZASADY OGÓLNE. Projekty współfinansowane ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 Regulamin przyznawania stypendium motywacyjnego dla studentów/ek studiujących na kierunkach zamawianych uruchomionych w roku akademickim 2012/2013 na Wydziale Elektroniki Politechniki Wrocławskiej Stypendia
Regulamin przyznawania stypendium motywacyjnego dla studentów/ek studiujących na kierunkach zamawianych uruchomionych w roku akademickim 2012/2013 na Wydziale Elektroniki Politechniki Wrocławskiej Stypendia