Współczynniki DOP i miary dokładności w obserwacjach satelitarnych. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
|
|
|
- Marta Dziedzic
- 6 lat temu
- Przeglądów:
Transkrypt

1 Współcynniki OP i miary dokładności w obserwacjac saeliarnyc dr ab inż Paweł Zalewski Akademia Morska w Scecinie

2 Geomerycna ocena dokładności: - -

3 Geomerycna ocena dokładności: - 3 -
4 OP współcynniki geomerycnej dokładności: iluions of precision (OP są współcynnikami geomerycnymi dokładności spodiewanyc wyników poycji w odbiorniku GPS Warość yc współcynników jes uależniona od wajemnyc położeń na orbicie saeliów kóryc sygnał wykorysywany jes do poycjonowania cyli od geomerii ic konfiguracji Warości OP mogą być wyrażane w różny sposób w ależności od wpływu poycji saeliów na poscególne komponeny poycji odbiornika: GOP geomerical diluion of precision (geomerycny POP posiional diluion of precision (poycyjny HOP orional diluion of precision (w poiomie VOP verical diluion of precision (w pionie TOP ime diluion of precision (casowy - 4 -
5 OP współcynniki geomerycnej dokładności: GOP geomerical diluion of precision Ogólny współcynnik geomerycnej dokładności odnosący się do cerec miennyc opisującyc wynaconą sysemu GPS poycję (X Y Z lub (B(φ L(λ Współcynnik en łący casowo presrenną isoę pomiaru opisując jakość osacowania w presreni 4: gdie: y lub: GOP c y c - błąd pomiaru parameru linii poycyjnej pseudoodległości akłada się że dla każdego saeliy równy - jednowymiarowe błędy średniokwadraowe (odcylenia sandardowe wynaconej w rec wymiarac poycji i casu GOP E N U c y d c d - 5 -
6 OP współcynniki geomerycnej dokładności: POP posiional diluion of precision Presrenny współcynnik geomerycnej dokładności 3 odnosący się do poycji rójwymiarowej (X Y Z lub (B L sosowany w nawigacji lonicej kosmicnej lądowej i precyyjnym miernicwie geodeji lub: POP y POP E N U - 6 -
7 OP współcynniki geomerycnej dokładności: HOP orional diluion of precision Płascynowy (poiomy współcynnik geomerycnej dokładności odnosący się do poycji dwuwymiarowej (X Y lub (φ λ Isony w nawigacji morskiej gdy brak jes koniecności osacowywania wysokości ( lub: HOP HOP E y N - 7 -
8 OP współcynniki geomerycnej dokładności: VOP verical diluion of precision Werykalny (pionowy współcynnik geomerycnej dokładności odnosący się do pomiaru wysokości jednowymiarowej linii poycyjnej (Z lub ( Isony w nawigacji lonicej kosmicnej i morskiej (np pomiarac osiadania saku VOP U - 8 -
9 OP współcynniki geomerycnej dokładności: TOP ime diluion of precision Casowy współcynnik geomerycnej dokładności odnosący się do pomiaru casu jakości sacowania TOP c c d - 9 -
10 OP współcynniki geomerycnej dokładności: Wymienione współcynniki geomerycne ależą odwronie proporcjonalnie do błędu pomiaru parameru mieronego w sysemie a wpros proporcjonalnie do błędów wynacenia każdej e współrędnyc w ym casu Wyrażenie pod pierwiaskiem odpowiada błędowi średniemu poycji M OP 3 jes awse więkse równe od OP Zagadnienie minimaliacji OP jes klucowym problemem umożliwiającym orymanie współrędnyc poycji wysoką dokładnością - 0 -
11 OP współcynniki geomerycnej dokładności: Srefa widialności saeliy P min S Płascyna oryonu opocenrycnego R Równik O Powiercnia Ziemi Srefa widialności saeliy uwględnieniem dolnej granicnej wysokości opocenrycnej wpływa na OP i dosępność poycji - -
12 OP współcynniki geomerycnej dokładności: N W E 3 30 S Preenacja romiescenia saeliów nad oryonem opocenrycnym w odbiorniku GNSS - -
13 - 3 - okładność określenia poycji w sysemie saeliarnym można określić popre macier kowariancji pryrosu współrędnyc Wekor pryrosu współrędnyc geocenrycnyc lub geodeyjnyc: gdie: - pryros wekora sanu w kierunku N-S - pryros wekora sanu w kierunku E-W - pryros wekora sanu w kierunku werykalnym - pryros poprawki egara odbiornika Analiycne wynacenie OP: y lub
14 - 4 - Maciere kowariancji wekora (pryrosu współrędnyc: - geocenrycnyc: - geograficnyc lub geodeyjnyc (opocenrycnyc: Analiycne wynacenie OP: ( ( H H y y y y y y A A T W GS y T
15 - 5 - Transformacja do WGS lub kowariancji pomiarów opocenrycnyc nasępuje popre roację R (pomijając składową casu: Analiycne wynacenie OP: 0 T Xy W GS R R R U UE UN EU E EN NU NE N opo
16 - 6 - Analiycne wynacenie OP: race( T Z Y X T U E N T Z Y X U E N E N U GOP TOP POP HOP VOP GOP la pry analiie wyłącnie geomerycnej: UERE
17 Analiycne wynacenie OP: Korysając maciery współcynników pryrosów sacowań opocenrycnyc uależnionyc od odległości enialnyc i aymuów saeliów: A NEU Si N Si 90 E U Odległość enialna wględem wysokości opocenrycnej: Macier kowariancji pomiarów: i Si A Si i i Si A Si Si ( A T NEU A NEU - 7 -
18 - 8 - Analiycne wynacenie OP: 4 ( n n n n n NEUT el A el A el el A el A el el A el A el n A

19 Minimaliacja OP maksimum objęości bryły: min{race( } - 9 -
20 Minimaliacja OP: Pry braku wysokościowej rędnej minimaliacja OP nasępuje gdy saeliy romiescone są równomiernie dookoła widnokręgu (minimalne pole figury budowanej błędów linii poycyjnyc ora maksymalne pole figury o wiercołkac w poycjac saeliów pry równyc odsępac kąowyc: A i - A j =cons=360 /n SAT A NEU ( A ( A ( A 3 ( A ( A ( A 3-0 -

21 Minimaliacja OP: - -
22 Miary dokładności: - -
23 Miary dokładności: - 3 -
24 Miary dokładności: - 4 -

25 Miary dokładności SPS 008: - 5 -
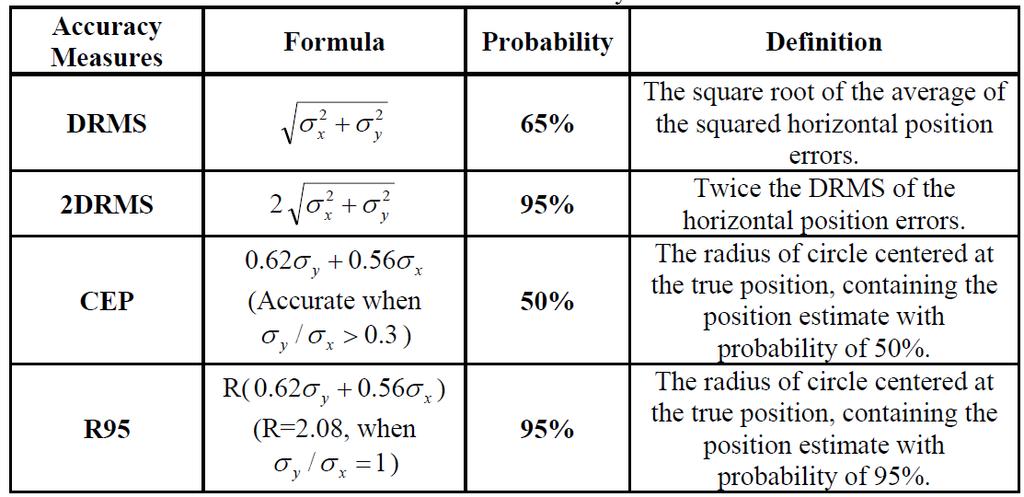
26 Prykład wykorysania OP: Porównanie jakości uyskanyc poycji dwóc odbiorników GPS - RTK: Jeżeli sysem A ma według specyfikacji producena dokładność 0mm RMS 3 a sysem B dokładność 0mm CEP o kóry nic wynaca dokładniej poycję? Odpowiedź ależy od sosunku POP do HOP wynacanyc poycji gdyż miara RMS A3 odnosi się do presreni rójwymiarowej a miara CEP B do dwuwymiarowej Prykładowo gdy: POP HOP A A POP HOP B B POP HOP 8 sukamy najpierw sosunku dla sysemu B: RMS B3 CEP a akładając że mamy rokłady normalne współrędnyc poycji: CEPB 0836 RMS B B - 6 -
27 Prykład wykorysania OP: Porównanie jakości uyskanyc poycji dwóc odbiorników GPS RTK: RMS CEP B3 B RMS B3 836 RMS 0 B POP 0836 HOP Skąd dla sysemu B: RMS B [mm] Ponieważ dokładność RMS 3 sysemu A wynosąca 0mm jes lepsa en sysem jes dokładniejsy pry akualnej konfiguracji saeliów - 7 -
Nawigacja: ocena dokładności pozycji. dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie
 Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
W siła działająca na bryłę zredukowana do środka masy ( = 0
 Popęd i popęd bryły Bryła w ruchu posępowym. Zasada pędu i popędu ma posać: p p S gdie: p m v pęd bryły w ruchu posępowym S c W d popęd siły diałającej na bryłę w ruchu posępowym aś: v c prędkość środka
Popęd i popęd bryły Bryła w ruchu posępowym. Zasada pędu i popędu ma posać: p p S gdie: p m v pęd bryły w ruchu posępowym S c W d popęd siły diałającej na bryłę w ruchu posępowym aś: v c prędkość środka
Badanie transformatora jednofazowego
 BADANIE TRANSFORMATORA JEDNOFAZOWEGO Cel ćwicenia Ponanie budowy i asady diałania ora metod badania i podstawowych charakterystyk transformatora jednofaowego. I. WIADOMOŚCI TEORETYCZNE Budowa i asada diałania
BADANIE TRANSFORMATORA JEDNOFAZOWEGO Cel ćwicenia Ponanie budowy i asady diałania ora metod badania i podstawowych charakterystyk transformatora jednofaowego. I. WIADOMOŚCI TEORETYCZNE Budowa i asada diałania
REGUŁY POLITYKI PIENIĘŻNEJ A PROGNOZOWANIE WSKAŹNIKA INFLACJI
 gnieska Prybylska-Maur Uniwersye Ekonomicny w aowicach REGUŁY POLIYI PIENIĘŻNEJ PROGNOZOWNIE WSŹNI INFLCJI Wprowadenie Jednym rodaów poliyki pieniężne es poliyka opara na regułach poliyki pieniężne. en
gnieska Prybylska-Maur Uniwersye Ekonomicny w aowicach REGUŁY POLIYI PIENIĘŻNEJ PROGNOZOWNIE WSŹNI INFLCJI Wprowadenie Jednym rodaów poliyki pieniężne es poliyka opara na regułach poliyki pieniężne. en
Sprawdzanie transformatora jednofazowego
 Sprawdanie transformatora jednofaowego SPRAWDZANIE TRANSFORMATORA JEDNOFAZOWEGO Cel ćwicenia Ponanie budowy i asady diałania ora metod badania i podstawowych charakterystyk transformatora jednofaowego.
Sprawdanie transformatora jednofaowego SPRAWDZANIE TRANSFORMATORA JEDNOFAZOWEGO Cel ćwicenia Ponanie budowy i asady diałania ora metod badania i podstawowych charakterystyk transformatora jednofaowego.
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Pobieranie próby. Rozkład χ 2
 Graficzne przedsawianie próby Hisogram Esymaory przykład Próby z rozkładów cząskowych Próby ze skończonej populacji Próby z rozkładu normalnego Rozkład χ Pobieranie próby. Rozkład χ Posać i własności Znaczenie
Graficzne przedsawianie próby Hisogram Esymaory przykład Próby z rozkładów cząskowych Próby ze skończonej populacji Próby z rozkładu normalnego Rozkład χ Pobieranie próby. Rozkład χ Posać i własności Znaczenie
ψ przedstawia zależność
 Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Ruch falowy 4-4 Ruch falowy Ruch falowy polega na rozchodzeniu się zaburzenia (odkszałcenia) w ośrodku sprężysym Wielkość zaburzenia jes, podobnie jak w przypadku drgań, funkcją czasu () Zaburzenie rozchodzi
Katedra Geotechniki i Budownictwa Drogowego. WYDZIAŁ NAUK TECHNICZNYCH Uniwersytet Warmińsko-Mazurski
 Katedra Geotechniki i Budownictwa Drogowego WYDZIAŁ NAUK TECHNICZNYCH Uniwersytet Warmińsko-Maurski Mechanika Gruntów dr inż. Ireneus Dyka http://pracownicy.uwm.edu.pl/i.dyka e-mail: i.dyka@uwm.edu.pl
Katedra Geotechniki i Budownictwa Drogowego WYDZIAŁ NAUK TECHNICZNYCH Uniwersytet Warmińsko-Maurski Mechanika Gruntów dr inż. Ireneus Dyka http://pracownicy.uwm.edu.pl/i.dyka e-mail: i.dyka@uwm.edu.pl
Animowana grafika 3D. Opracowanie: J. Kęsik.
 Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollb.pl Transformacje 3D Podobnie jak w prestreni -wymiarowej, dla prestreni 3-wymiarowej definijemy transformacje RST: presnięcie miana skali obrót
Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollb.pl Transformacje 3D Podobnie jak w prestreni -wymiarowej, dla prestreni 3-wymiarowej definijemy transformacje RST: presnięcie miana skali obrót
Optymalizacja (w matematyce) termin optymalizacja odnosi się do problemu znalezienia ekstremum (minimum lub maksimum) zadanej funkcji celu.
 termin optymalizacja odnosi się do problemu znalezienia ekstremum (minimum lub maksimum) zadanej funkcji celu.") TEMATYKA: Optymaliacja nakładania wyników pomiarów Ćwicenia nr 6 DEFINICJE: Optymaliacja: metoda wynacania najlepsego (sukamy wartości ekstremalnej) rowiąania punktu widenia określonego kryterium (musimy
TEMATYKA: Optymaliacja nakładania wyników pomiarów Ćwicenia nr 6 DEFINICJE: Optymaliacja: metoda wynacania najlepsego (sukamy wartości ekstremalnej) rowiąania punktu widenia określonego kryterium (musimy
Wykład FIZYKA I. 2. Kinematyka punktu materialnego. Dr hab. inż. Władysław Artur Woźniak
 Wykład FIZYKA I. Kinemayka punku maerialnego Kaedra Opyki i Fooniki Wydział Podsawowych Problemów Techniki Poliechnika Wrocławska hp://www.if.pwr.wroc.pl/~wozniak/fizyka1.hml Miejsce konsulacji: pokój
Wykład FIZYKA I. Kinemayka punku maerialnego Kaedra Opyki i Fooniki Wydział Podsawowych Problemów Techniki Poliechnika Wrocławska hp://www.if.pwr.wroc.pl/~wozniak/fizyka1.hml Miejsce konsulacji: pokój
PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I
 PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I Wymagania konieczne ocena dopuszczająca wie że długość i odległość mierzymy w milimerach cenymerach merach lub kilomerach
PRZEDMIOTOWY SYSTEM OCENIANIA Z FIZYKI WYMAGANIA EDUKACYJNE DLA UCZNIÓW KLAS I Wymagania konieczne ocena dopuszczająca wie że długość i odległość mierzymy w milimerach cenymerach merach lub kilomerach
Transformator Φ M. uzwojenia; siła elektromotoryczna indukowana w i-tym zwoju: dφ. = z1, z2 liczba zwojów uzwojenia pierwotnego i wtórnego.
 Transformator Φ r Φ M Φ r i i u u Φ i strumień magnetycny prenikający pre i-ty wój pierwsego uwojenia; siła elektromotorycna indukowana w i-tym woju: dφ ei, licba wojów uwojenia pierwotnego i wtórnego.
Transformator Φ r Φ M Φ r i i u u Φ i strumień magnetycny prenikający pre i-ty wój pierwsego uwojenia; siła elektromotorycna indukowana w i-tym woju: dφ ei, licba wojów uwojenia pierwotnego i wtórnego.
I. KINEMATYKA I DYNAMIKA
 piagoras.d.pl I. KINEMATYKA I DYNAMIKA KINEMATYKA: Położenie ciała w przesrzeni można określić jedynie względem jakiegoś innego ciała lub układu ciał zwanego układem odniesienia. Ruch i spoczynek są względne
piagoras.d.pl I. KINEMATYKA I DYNAMIKA KINEMATYKA: Położenie ciała w przesrzeni można określić jedynie względem jakiegoś innego ciała lub układu ciał zwanego układem odniesienia. Ruch i spoczynek są względne
2015-01-15. Edycja pierwsza 2014/1015. dla kierunku fizyka medyczna, I rok, studia magisterskie
 05-0-5. Opis różnicę pomiędy błędem pierwsego rodaju a błędem drugiego rodaju Wyniki eksperymentu składamy w dwie hipotey statystycne: H0 versus H, tak, by H0 odrucić i pryjąć H. Jeśli decydujemy, że pryjmujemy
05-0-5. Opis różnicę pomiędy błędem pierwsego rodaju a błędem drugiego rodaju Wyniki eksperymentu składamy w dwie hipotey statystycne: H0 versus H, tak, by H0 odrucić i pryjąć H. Jeśli decydujemy, że pryjmujemy
Zestaw zadań 12: Przekształcenia liniowe. Macierze przekształceń liniowych. z z + 2 2x + y. x y z. x y + 2t 2x + 3y + 5z t x + z t
 Zesaw adań : Preksałcenia liniowe. Maciere preksałceń liniowch () Kóre podanch niżej preksałceń ϕ : K n K m są preksałceniami liniowmi: a) n = m = 3, ϕ( + ) = +, b) n = m = 3, ϕ( ) = +, 3 + + + +, d) n
Zesaw adań : Preksałcenia liniowe. Maciere preksałceń liniowch () Kóre podanch niżej preksałceń ϕ : K n K m są preksałceniami liniowmi: a) n = m = 3, ϕ( + ) = +, b) n = m = 3, ϕ( ) = +, 3 + + + +, d) n
Algebra liniowa. Zadania przygotowujące do egzaminu: .Wskazówka: Zastosować wzór de Moivre'a;
 emer leni 5/6 lgebra liniowa Znaleźć i nakicować biór 8 C j ; a) ( ) b) { C j j } c) { C Im( ) } ; Zadania rgoowjące do egamin Wkaówka Zaoować wór de Moire'a; d) C Im Wnacć licb dla kórch macier je odwracalna
emer leni 5/6 lgebra liniowa Znaleźć i nakicować biór 8 C j ; a) ( ) b) { C j j } c) { C Im( ) } ; Zadania rgoowjące do egamin Wkaówka Zaoować wór de Moire'a; d) C Im Wnacć licb dla kórch macier je odwracalna
Ćwiczenia 3 ( ) Współczynnik przyrostu naturalnego. Koncepcja ludności zastojowej i ustabilizowanej. Prawo Lotki.
 Współczynnik przyrostu naturalnego. Koncepcja ludności zastojowej i ustabilizowanej. Prawo Lotki.") Ćwiczenia 3 (22.04.2013) Współczynnik przyrosu nauralnego. Koncepcja ludności zasojowej i usabilizowanej. Prawo Loki. Współczynnik przyrosu nauralnego r = U Z L gdzie: U - urodzenia w roku Z - zgony w
Ćwiczenia 3 (22.04.2013) Współczynnik przyrosu nauralnego. Koncepcja ludności zasojowej i usabilizowanej. Prawo Loki. Współczynnik przyrosu nauralnego r = U Z L gdzie: U - urodzenia w roku Z - zgony w
Zadanie 0 Obliczyć całki. Wyniki sprawdzić obliczając pochodne otrzymanych funkcji pierwotnych. x 4. x x. x x 1 , 11)
") PR DOMOW ŁK NIEOZNZON / Zadanie Oblicć całki Wniki prawdić oblicając pochodne ormanch funkcji pierwonch ) d ) d ) d ) d Zadanie Oblicć całki nieonacone całkując pre cęści ) ln d ) co d ) ln d ) d ) arcg
PR DOMOW ŁK NIEOZNZON / Zadanie Oblicć całki Wniki prawdić oblicając pochodne ormanch funkcji pierwonch ) d ) d ) d ) d Zadanie Oblicć całki nieonacone całkując pre cęści ) ln d ) co d ) ln d ) d ) arcg
Kombinowanie prognoz. - dlaczego należy kombinować prognozy? - obejmowanie prognoz. - podstawowe metody kombinowania prognoz
 Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
Noaki do wykładu 005 Kombinowanie prognoz - dlaczego należy kombinować prognozy? - obejmowanie prognoz - podsawowe meody kombinowania prognoz - przykłady kombinowania prognoz gospodarki polskiej - zalecenia
RÓWNANIA RÓŻNICZKOWE WYKŁAD 13
 RÓWNANIA RÓŻNICZKOWE WYKŁAD 13 Geomeria różniczkowa Geomeria różniczkowa o dział maemayki, w kórym do badania obieków geomerycznych wykorzysuje się meody opare na rachunku różniczkowym. Obieky geomeryczne
RÓWNANIA RÓŻNICZKOWE WYKŁAD 13 Geomeria różniczkowa Geomeria różniczkowa o dział maemayki, w kórym do badania obieków geomerycznych wykorzysuje się meody opare na rachunku różniczkowym. Obieky geomeryczne
EKONOMETRIA wykład 2. Prof. dr hab. Eugeniusz Gatnar.
 EKONOMERIA wykład Prof. dr hab. Eugeniusz Ganar eganar@mail.wz.uw.edu.pl Przedziały ufności Dla paramerów srukuralnych modelu: P bˆ j S( bˆ z prawdopodobieńswem parameru b bˆ S( bˆ, ( m j j j, ( m j b
EKONOMERIA wykład Prof. dr hab. Eugeniusz Ganar eganar@mail.wz.uw.edu.pl Przedziały ufności Dla paramerów srukuralnych modelu: P bˆ j S( bˆ z prawdopodobieńswem parameru b bˆ S( bˆ, ( m j j j, ( m j b
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika GPS MAP 2010C systemu GPS Szczecin 2011 Temat: Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 7 Ocena dokładności wskazań odbiornika GPS MAP 2010C systemu GPS Szczecin 2011 Temat: Ocena dokładności
Modelowanie ruchu w sieci ulic. w warunkach ograniczonej
 Na prawach rękopisu Do uŝyku słuŝbowego INSTYTUT INśYNIERII LĄDOWEJ POLITECHNIKI WROCŁAWSKIEJ Modelowanie ruchu w sieci ulic w warunkach ograniconej prepusowości skryŝowań Seria: PRE nr 2/2007 Krysof Gas
Na prawach rękopisu Do uŝyku słuŝbowego INSTYTUT INśYNIERII LĄDOWEJ POLITECHNIKI WROCŁAWSKIEJ Modelowanie ruchu w sieci ulic w warunkach ograniconej prepusowości skryŝowań Seria: PRE nr 2/2007 Krysof Gas
ANALIZA WYTRZYMAŁOŚCIOWA STROPU BĘDĄCEGO W KONTAKCIE DWUPARAMETROWYM Z POKŁADEM PRZY EKSPLOATACJI NA ZAWAŁ
 Górnictwo i Geoinżynieria Rok 3 Zesyt 008 Marian Paluch*, Antoni Tajduś* ANALIZA WYTRZYMAŁOŚCIOWA STROPU BĘDĄCEGO W KONTAKCIE DWUPARAMETROWYM Z POKŁADEM PRZY EKSPLOATACJI NA ZAWAŁ. Wstęp Zajmować będiemy
Górnictwo i Geoinżynieria Rok 3 Zesyt 008 Marian Paluch*, Antoni Tajduś* ANALIZA WYTRZYMAŁOŚCIOWA STROPU BĘDĄCEGO W KONTAKCIE DWUPARAMETROWYM Z POKŁADEM PRZY EKSPLOATACJI NA ZAWAŁ. Wstęp Zajmować będiemy
ROZMYTE MODELOWANIE CZASÓW WYKONANIA ROBÓT BUDOWLANYCH W WARUNKACH NIEPEWNOŚCI FUZZY MODELING OF CONSTRUCTION WORKS DURATION UNDER UNCERTAINTY
 139 NBI IBDOV, JNUSZ KULEJEWSKI ROZMYTE MODELOWNIE CZSÓW WYKONNI ROBÓT BUDOWLNYCH W WRUNKCH NIEPEWNOŚCI FUZZY MODELING OF CONSTRUCTION WORKS DURTION UNDER UNCERTINTY Strescenie bstract Podcas realiacji
139 NBI IBDOV, JNUSZ KULEJEWSKI ROZMYTE MODELOWNIE CZSÓW WYKONNI ROBÓT BUDOWLNYCH W WRUNKCH NIEPEWNOŚCI FUZZY MODELING OF CONSTRUCTION WORKS DURTION UNDER UNCERTINTY Strescenie bstract Podcas realiacji
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
3. Zapas stabilności układów regulacji 3.1. Wprowadzenie
 3. Zapas stabilności układów regulacji 3.. Wprowadenie Dla scharakteryowania apasu stabilności roważymy stabilny układ regulacji o nanym schemacie blokowym: Ws () Gs () Ys () Hs () Rys. 3.. Schemat blokowy
3. Zapas stabilności układów regulacji 3.. Wprowadenie Dla scharakteryowania apasu stabilności roważymy stabilny układ regulacji o nanym schemacie blokowym: Ws () Gs () Ys () Hs () Rys. 3.. Schemat blokowy
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
H P1 H L1 A 1 N L A 5 A 6 H P 2 H L 2. Pojedynczy rekord obserwacyjny: Schemat opracowania jednej serii obserwacyjnej:
 Pojedyncy rekord obserwacyjny: SS,PG,.,,3.746,357.774,9:39:8, OZNCZENIE REKORDU NZW ODLEGŁOŚĆ KĄ POZIOY KĄ PIONOWY CZS Schema opracowana jednej ser obserwacyjnej: Ką poomy H L H P H P H P H P3 H L H L
Pojedyncy rekord obserwacyjny: SS,PG,.,,3.746,357.774,9:39:8, OZNCZENIE REKORDU NZW ODLEGŁOŚĆ KĄ POZIOY KĄ PIONOWY CZS Schema opracowana jednej ser obserwacyjnej: Ką poomy H L H P H P H P H P3 H L H L
Transformator jednofazowy (cd) Rys. 1 Stan jałowy transformatora. Wartość tego prądu zwykle jest mniejsza niż 5% prądu znamionowego:
 Rys. 1 Stan jałowy transformatora. Wartość tego prądu zwykle jest mniejsza niż 5% prądu znamionowego:") Transformator jednofaowy (cd) W transformatore pracującym be obciążenia (stan jałowy) wartość prądu po stronie wtórna jest równy eru (Rys. 1). W takim prypadku pre uwojenie strony pierwotnej prepływa tylko
Transformator jednofaowy (cd) W transformatore pracującym be obciążenia (stan jałowy) wartość prądu po stronie wtórna jest równy eru (Rys. 1). W takim prypadku pre uwojenie strony pierwotnej prepływa tylko
Automatyczna kompensacja mocy biernej z systemem monitorowania kopalnianej sieci 6 kv
 dr inż MARIAN HYLA Politechnika Śląska w Gliwicach Automatycna kompensacja mocy biernej systemem monitorowania kopalnianej sieci 6 kv W artykule predstawiono koncepcję, realiację ora efekty diałania centralnego
dr inż MARIAN HYLA Politechnika Śląska w Gliwicach Automatycna kompensacja mocy biernej systemem monitorowania kopalnianej sieci 6 kv W artykule predstawiono koncepcję, realiację ora efekty diałania centralnego
WNIOSKOWANIE STATYSTYCZNE
 Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
Wnioskowanie saysyczne w ekonomerycznej analizie procesu produkcyjnego / WNIOSKOWANIE STATYSTYCZNE W EKONOMETRYCZNEJ ANAIZIE PROCESU PRODUKCYJNEGO Maeriał pomocniczy: proszę przejrzeć srony www.cyf-kr.edu.pl/~eomazur/zadl4.hml
Metoda największej wiarygodności
 Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
Metoda największej wiarygodności Próbki w obecności tła Funkcja wiarygodności Iloraz wiarygodności Pomiary o różnej dokładności Obciążenie Informacja z próby i nierówność informacyjna Wariancja minimalna
Autor: Łukasz Adamkiewicz. Recenzenci: Michał Krzyżanowski, Krzysztof Skotak
 Z e wnę r nek os y dr owo neemi s j i a ni ec y s c eńpowi e r a s ek or aby owok omuna l neg o S a c unk i napods a wi edos ę pny c hda ny c h Auor: Łukas Adamkiewic Recenenci: Michał Kryżanowski, Krysof
Z e wnę r nek os y dr owo neemi s j i a ni ec y s c eńpowi e r a s ek or aby owok omuna l neg o S a c unk i napods a wi edos ę pny c hda ny c h Auor: Łukas Adamkiewic Recenenci: Michał Kryżanowski, Krysof
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Opis ruchu we współrzędnych prostokątnych (kartezjańskich)
") Opis ruchu we współrędch prosokąch (karejańskich) Opis ruchu we współrędch prosokąch jes podob do opisu a pomocą wekora wodącego, kórego pocąek leż w pocąku układu odiesieia. Położeie. Położeie puku A
Opis ruchu we współrędch prosokąch (karejańskich) Opis ruchu we współrędch prosokąch jes podob do opisu a pomocą wekora wodącego, kórego pocąek leż w pocąku układu odiesieia. Położeie. Położeie puku A
W takim modelu prawdopodobieństwo konfiguracji OR wynosi. 0, 21 lub , 79. 6
 achunek prawdopodobieństwa MP6 Wydiał Elektroniki, rok akad. 8/9, sem. letni Wykładowca: dr hab.. Jurlewic Prykłady do listy : Prestreń probabilistycna. Prawdopodobieństwo klasycne. Prawdopodobieństwo
achunek prawdopodobieństwa MP6 Wydiał Elektroniki, rok akad. 8/9, sem. letni Wykładowca: dr hab.. Jurlewic Prykłady do listy : Prestreń probabilistycna. Prawdopodobieństwo klasycne. Prawdopodobieństwo
Raport wyrównania pomiarów statycznych technika Stop&Go
 5878100.00 Raport wyrównania pomiarów statycznych technika Stop&Go POLAND/2000/zone 1 PO32 2sg1sg 3sg 4sg 5878000.00 5877900.00 15sg 11sg 12sg 14sg 13sg 10sg 6sg 9sg8sg 7sg VRS1 5sg 22sg PO44 V198084K.12o
5878100.00 Raport wyrównania pomiarów statycznych technika Stop&Go POLAND/2000/zone 1 PO32 2sg1sg 3sg 4sg 5878000.00 5877900.00 15sg 11sg 12sg 14sg 13sg 10sg 6sg 9sg8sg 7sg VRS1 5sg 22sg PO44 V198084K.12o
Przemieszczeniem ciała nazywamy zmianę jego położenia
 1 Przemieszczeniem ciała nazywamy zmianę jego położenia + 0 k k 0 Przemieszczenie jes wekorem. W przypadku jednowymiarowym możliwy jes ylko jeden kierunek, a zwro określamy poprzez znak. Przyjmujemy, że
1 Przemieszczeniem ciała nazywamy zmianę jego położenia + 0 k k 0 Przemieszczenie jes wekorem. W przypadku jednowymiarowym możliwy jes ylko jeden kierunek, a zwro określamy poprzez znak. Przyjmujemy, że
Rozruch silnika prądu stałego
 Rozruch silnika prądu sałego 1. Model silnika prądu sałego (SPS) 1.1 Układ równań modelu SPS Układ równań modelu silnika prądu sałego d ua = Ra ia + La ia + ea d równanie obwodu wornika d uf = Rf if +
Rozruch silnika prądu sałego 1. Model silnika prądu sałego (SPS) 1.1 Układ równań modelu SPS Układ równań modelu silnika prądu sałego d ua = Ra ia + La ia + ea d równanie obwodu wornika d uf = Rf if +
Urządzenia i Układów Automatyki Instrukcja Wykonania Projektu
 KAEDRA ENERGOELEKRYKI POLIECHNIKI WROCŁAWSKIEJ Urądenia i Układów Auomayki Insrukcja Wykonania Projeku Auory: rof. dr hab. inż. Eugenius Rosołowski dr inż. Pior Pier dr inż. Daniel Bejmer Wrocław 5 I.
KAEDRA ENERGOELEKRYKI POLIECHNIKI WROCŁAWSKIEJ Urądenia i Układów Auomayki Insrukcja Wykonania Projeku Auory: rof. dr hab. inż. Eugenius Rosołowski dr inż. Pior Pier dr inż. Daniel Bejmer Wrocław 5 I.
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
STEROWANIE ADAPTACYJNE RUCHEM ROBOTA PODWODNEGO W PŁ ASZCZYŹ NIE PIONOWEJ
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLVII NR 4 (167) 2006 Jery Garus Akademia Marynarki Wojennej STEROWANIE ADAPTACYJNE RUCHEM ROBOTA PODWODNEGO W PŁ ASZCZYŹ NIE PIONOWEJ STRESZCZENIE W artykule
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLVII NR 4 (167) 2006 Jery Garus Akademia Marynarki Wojennej STEROWANIE ADAPTACYJNE RUCHEM ROBOTA PODWODNEGO W PŁ ASZCZYŹ NIE PIONOWEJ STRESZCZENIE W artykule
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Rozkłady wielu zmiennych
 Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
Rozkłady wielu zmiennych Uogólnienie pojęć na rozkład wielu zmiennych Dystrybuanta, gęstość prawdopodobieństwa, rozkład brzegowy, wartości średnie i odchylenia standardowe, momenty Notacja macierzowa Macierz
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 11 Ocena dokładności wskazań odbiornika FURUNO GP-80 systemu GPS z zewnętrznym odbiornikiem FURUNO
Metody dokładne w zastosowaniu do rozwiązywania łańcuchów Markowa
 Metody dokładne w astosowaniu do rowiąywania łańcuchów Markowa Beata Bylina, Paweł Górny Zakład Informatyki, Instytut Matematyki, Uniwersytet Marii Curie-Skłodowskiej Plac Marii Curie-Skłodowskiej 5, 2-31
Metody dokładne w astosowaniu do rowiąywania łańcuchów Markowa Beata Bylina, Paweł Górny Zakład Informatyki, Instytut Matematyki, Uniwersytet Marii Curie-Skłodowskiej Plac Marii Curie-Skłodowskiej 5, 2-31
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
BP 11/ TECHNIKA BEZPIECZEÑSTWA. light sources for households, photometric. Na rynku jest obecnie dostêpnych wiele rodza-
 Centralny Instytut Ochrony Pracy Pañstwowy Instytut Badawcy Politechnika Ponañska - - light sources for hoholds, photometric Na rynku jest obecnie dostêpnych wiele roda- - mniej energii elektrycnej i maj¹
Centralny Instytut Ochrony Pracy Pañstwowy Instytut Badawcy Politechnika Ponañska - - light sources for hoholds, photometric Na rynku jest obecnie dostêpnych wiele roda- - mniej energii elektrycnej i maj¹
Temat: Weryfikacja nienaruszalności bezpieczeństwa SIL struktury sprzętowej realizującej funkcje bezpieczeństwa
 1 Lab3: Bezpieczeńswo funkcjonalne i ochrona informacji Tema: Weryfikacja nienaruszalności bezpieczeńswa SIL srukury sprzęowej realizującej funkcje bezpieczeńswa Kryeria probabilisyczne bezpieczeńswa funkcjonalnego
1 Lab3: Bezpieczeńswo funkcjonalne i ochrona informacji Tema: Weryfikacja nienaruszalności bezpieczeńswa SIL srukury sprzęowej realizującej funkcje bezpieczeńswa Kryeria probabilisyczne bezpieczeńswa funkcjonalnego
MES W ANALIZIE SPRĘŻYSTEJ UKŁADÓW PRĘTOWYCH
 MES W ANALIZIE SPRĘŻYS UKŁADÓW PRĘOWYCH Prykłady obliceń Belki Lidia FEDOROWICZ Jan FEDOROWICZ Magdalena MROZEK Dawid MROZEK Gliwice 7r. 6-4 Lidia Fedorowic, Jan Fedorowic, Magdalena Mroek, Dawid Mroek
MES W ANALIZIE SPRĘŻYS UKŁADÓW PRĘOWYCH Prykłady obliceń Belki Lidia FEDOROWICZ Jan FEDOROWICZ Magdalena MROZEK Dawid MROZEK Gliwice 7r. 6-4 Lidia Fedorowic, Jan Fedorowic, Magdalena Mroek, Dawid Mroek
Przyswojenie wiedzy na temat serwisów systemu GPS i charakterystyk z nimi związanych
 C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Podstawy Automatyki
 Poliechnika Gdańska Wydział Elekroechniki i Auomayki Kaedra Inżynierii Sysemów Serowania Podsawy Auomayki Repeyorium z Podsaw auomayki Zadania do ćwiczeń ermin T15 Opracowanie: Kazimierz Duzinkiewicz,
Poliechnika Gdańska Wydział Elekroechniki i Auomayki Kaedra Inżynierii Sysemów Serowania Podsawy Auomayki Repeyorium z Podsaw auomayki Zadania do ćwiczeń ermin T15 Opracowanie: Kazimierz Duzinkiewicz,
Budowa atomów. Atomy wieloelektronowe Zakaz Pauliego Układ okresowy pierwiastków
 Novosibirsk Russia September 00 W-6 (Jarosewic) slajdy Na podstawie preentacji prof. J. Rutkowskiego Budowa atomów Atomy wieloelektronowe Zaka Pauliego Układ okresowy pierwiastków Atomy wieloelektronowe
Novosibirsk Russia September 00 W-6 (Jarosewic) slajdy Na podstawie preentacji prof. J. Rutkowskiego Budowa atomów Atomy wieloelektronowe Zaka Pauliego Układ okresowy pierwiastków Atomy wieloelektronowe
Raport wyrównania pomiarów statycznych technika statyczna
 Raport wyrównania pomiarów statycznych technika statyczna POLAND/2000/zone 1 GRUD ilaw GRUD077I.12o grud 5900000.00 BYDG BYDG077I.12o bydg toru PO31 PO32 PO44 TORU PO310771.12o PO320773.12o PO440772.12o
Raport wyrównania pomiarów statycznych technika statyczna POLAND/2000/zone 1 GRUD ilaw GRUD077I.12o grud 5900000.00 BYDG BYDG077I.12o bydg toru PO31 PO32 PO44 TORU PO310771.12o PO320773.12o PO440772.12o
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
3. Zapas stabilności układów regulacji 3.1. Wprowadzenie
 3. Zapas stabilności układów regulacji 3.. Wprowadenie Dla scharakteryowania apasu stabilności roważymy stabilny układ regulacji o nanym schemacie blokowym: Ws () Gs () Ys () Hs () Rys. 3.. Schemat blokowy
3. Zapas stabilności układów regulacji 3.. Wprowadenie Dla scharakteryowania apasu stabilności roważymy stabilny układ regulacji o nanym schemacie blokowym: Ws () Gs () Ys () Hs () Rys. 3.. Schemat blokowy
Wskazówki projektowe do obliczania nośności i maksymalnego zanurzenia statku rybackiego na wstępnym etapie projektowania
 CEPOWSKI omasz 1 Wskazówki projekowe do obliczania nośności i maksymalnego zanurzenia saku rybackiego na wsępnym eapie projekowania WSĘP Celem podjęych badań było opracowanie wskazówek projekowych do wyznaczania
CEPOWSKI omasz 1 Wskazówki projekowe do obliczania nośności i maksymalnego zanurzenia saku rybackiego na wsępnym eapie projekowania WSĘP Celem podjęych badań było opracowanie wskazówek projekowych do wyznaczania
MIESIĄC NR TEMAT LEKCJI UWAGI 1 Lekcja organizacyjna, BHP na lekcji. 4 Powtórzenie i utrwalenie wiadomości z klasy I sem. I
 Rozkład materiału nauczania w roku szkolnym 2016/2017, kl. II TG Geodezja Ogólna, ( II kl.-6h) mgr inż. Joanna Guzik, TECHNIK GEODETA 311104 Książka Andrzej Jagielski Geodezja I, Geodezja II MIESIĄC NR
Rozkład materiału nauczania w roku szkolnym 2016/2017, kl. II TG Geodezja Ogólna, ( II kl.-6h) mgr inż. Joanna Guzik, TECHNIK GEODETA 311104 Książka Andrzej Jagielski Geodezja I, Geodezja II MIESIĄC NR
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
Politechnika Częstochowska Wydział Inżynierii Mechanicznej i Informatyki. Sprawozdanie #2 z przedmiotu: Prognozowanie w systemach multimedialnych
 Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
Poliechnika Częsochowska Wydział Inżynierii Mechanicznej i Informayki Sprawozdanie #2 z przedmiou: Prognozowanie w sysemach mulimedialnych Andrzej Siwczyński Andrzej Rezler Informayka Rok V, Grupa IO II
ĆWICZENIE 5 BADANIE ZASILACZY UPS
 ĆWICZENIE 5 BADANIE ZASILACZY UPS Cel ćwicenia: aponanie budową i asadą diałania podstawowych typów asilacy UPS ora pomiar wybranych ich parametrów i charakterystyk. 5.1. Podstawy teoretycne 5.1.1. Wstęp
ĆWICZENIE 5 BADANIE ZASILACZY UPS Cel ćwicenia: aponanie budową i asadą diałania podstawowych typów asilacy UPS ora pomiar wybranych ich parametrów i charakterystyk. 5.1. Podstawy teoretycne 5.1.1. Wstęp
SERIA III ĆWICZENIE 3_1A. Temat ćwiczenia: Badanie transformatora jednofazowego. Wiadomości do powtórzenia:
 SER ĆCZENE 3_1 Temat ćwicenia: Badanie transformatora jednofaowego. iadomości do powtórenia: 1. Budowa i dane namionowe transformatora jednofaowego. 1 U 1 U 1 ansformator jest urądeniem prenaconym do pretwarania
SER ĆCZENE 3_1 Temat ćwicenia: Badanie transformatora jednofaowego. iadomości do powtórenia: 1. Budowa i dane namionowe transformatora jednofaowego. 1 U 1 U 1 ansformator jest urądeniem prenaconym do pretwarania
Nazwa przedmiotu: Techniki symulacji. Kod przedmiotu: EZ1C Numer ćwiczenia: Ocena wrażliwości i tolerancji układu
 P o l i t e c h n i k a B i a ł o s t o c k a W y d i a ł E l e k t r y c n y Nawa predmiotu: Techniki symulacji Kierunek: elektrotechnika Kod predmiotu: EZ1C400 053 Numer ćwicenia: Temat ćwicenia: E47
P o l i t e c h n i k a B i a ł o s t o c k a W y d i a ł E l e k t r y c n y Nawa predmiotu: Techniki symulacji Kierunek: elektrotechnika Kod predmiotu: EZ1C400 053 Numer ćwicenia: Temat ćwicenia: E47
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Document: Exercise-03-manual --- 2014/12/10 --- 8:54--- page 1 of 8 INSTRUKCJA DO ĆWICZENIA NR 3. Optymalizacja wielowarstwowych płyt laminowanych
 Document: Exercise-03-manual --- 2014/12/10 --- 8:54--- page 1 of 8 PRZEDMIOT TEMAT KATEDRA MECHANIKI STOSOWANEJ Wydiał Mechanicny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 3 1. CEL ĆWICZENIA Wybrane
Document: Exercise-03-manual --- 2014/12/10 --- 8:54--- page 1 of 8 PRZEDMIOT TEMAT KATEDRA MECHANIKI STOSOWANEJ Wydiał Mechanicny POLITECHNIKA LUBELSKA INSTRUKCJA DO ĆWICZENIA NR 3 1. CEL ĆWICZENIA Wybrane
Badanie transformatora jednofazowego. (Instrukcja do ćwiczenia)
") 1 Badanie transformatora jednofaowego (Instrukcja do ćwicenia) Badanie transformatora jednofaowego. CEL ĆICZENI: Ponanie asady diałania, budowy i właściwości.transformatora jednofaowego. 1 IDOMOŚCI TEORETYCZNE
1 Badanie transformatora jednofaowego (Instrukcja do ćwicenia) Badanie transformatora jednofaowego. CEL ĆICZENI: Ponanie asady diałania, budowy i właściwości.transformatora jednofaowego. 1 IDOMOŚCI TEORETYCZNE
LABORATORIUM PODSTAW OPTOELEKTRONIKI WYZNACZANIE CHARAKTERYSTYK STATYCZNYCH I DYNAMICZNYCH TRANSOPTORA PC817
 LABORATORIUM PODSTAW OPTOELEKTRONIKI WYZNACZANIE CHARAKTERYSTYK STATYCZNYCH I DYNAMICZNYCH TRANSOPTORA PC87 Ceem badań jes ocena właściwości saycznych i dynamicznych ransopora PC 87. Badany ransopor o
LABORATORIUM PODSTAW OPTOELEKTRONIKI WYZNACZANIE CHARAKTERYSTYK STATYCZNYCH I DYNAMICZNYCH TRANSOPTORA PC87 Ceem badań jes ocena właściwości saycznych i dynamicznych ransopora PC 87. Badany ransopor o
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Metody badania wpływu zmian kursu walutowego na wskaźnik inflacji
 Agnieszka Przybylska-Mazur * Meody badania wpływu zmian kursu waluowego na wskaźnik inflacji Wsęp Do oceny łącznego efeku przenoszenia zmian czynników zewnęrznych, akich jak zmiany cen zewnęrznych (szoki
Agnieszka Przybylska-Mazur * Meody badania wpływu zmian kursu waluowego na wskaźnik inflacji Wsęp Do oceny łącznego efeku przenoszenia zmian czynników zewnęrznych, akich jak zmiany cen zewnęrznych (szoki
Przedmowa 5. Rozdział 1 Przekształcenie Laplace a 7
 Spis treści Predmowa 5 Rodiał 1 Prekstałcenie Laplace a 7 Rodiał 2 Wyprowadenie prekstałcenia Z 9 1. Prykładowe adania......................... 10 2. Zadania do samodielnego rowiąania............... 16
Spis treści Predmowa 5 Rodiał 1 Prekstałcenie Laplace a 7 Rodiał 2 Wyprowadenie prekstałcenia Z 9 1. Prykładowe adania......................... 10 2. Zadania do samodielnego rowiąania............... 16
WYBRANE STANY NIEUSTALONE TRANSFORMATORA
 WYBRANE STANY NIEUSTAONE TRANSFORMATORA Analę pracy ransformaora w sanach prejścowych można preprowadć w oparcu o równana dynamk. Rys. Schema deowy ransformaora jednofaowego. Onacmy kerunk prądów napęć
WYBRANE STANY NIEUSTAONE TRANSFORMATORA Analę pracy ransformaora w sanach prejścowych można preprowadć w oparcu o równana dynamk. Rys. Schema deowy ransformaora jednofaowego. Onacmy kerunk prądów napęć
Dendrochronologia Tworzenie chronologii
 Dendrochronologia Dendrochronologia jes nauką wykorzysującą słoje przyrosu rocznego drzew do określania wieku (daowania) obieków drewnianych (budynki, przedmioy). Analizy różnych paramerów słojów przyrosu
Dendrochronologia Dendrochronologia jes nauką wykorzysującą słoje przyrosu rocznego drzew do określania wieku (daowania) obieków drewnianych (budynki, przedmioy). Analizy różnych paramerów słojów przyrosu
Metrologia cieplna i przepływowa
 Metrologia cieplna i przepływowa Systemy Maszyny i Urządzenia Energetyczne IV rok Badanie manometru w różnych pozycjach pracy Instrukcja do ćwiczenia Katedra Systemów Energetycznych i Urządzeń Ochrony
Metrologia cieplna i przepływowa Systemy Maszyny i Urządzenia Energetyczne IV rok Badanie manometru w różnych pozycjach pracy Instrukcja do ćwiczenia Katedra Systemów Energetycznych i Urządzeń Ochrony
Ekonometryczne modele nieliniowe. Wykład 7 Modele łagodnego przejścia, sieci neuronowe w ekonometrii
 Ekonomerycne modele nieliniowe Wykład 7 Modele łagodnego prejścia, sieci neuronowe w ekonomerii Lieraura Timo Teräsvira, Specificaion, Esimaion, and Evaluaion of Smooh Transiion Auoregressive Models, Journal
Ekonomerycne modele nieliniowe Wykład 7 Modele łagodnego prejścia, sieci neuronowe w ekonomerii Lieraura Timo Teräsvira, Specificaion, Esimaion, and Evaluaion of Smooh Transiion Auoregressive Models, Journal
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
licencjat Pytania teoretyczne:
 Plan wykładu: 1. Wiadomości ogólne. 2. Model ekonomeryczny i jego elemeny 3. Meody doboru zmiennych do modelu ekonomerycznego. 4. Szacownie paramerów srukuralnych MNK. Weryfikacja modelu KMNK 6. Prognozowanie
Plan wykładu: 1. Wiadomości ogólne. 2. Model ekonomeryczny i jego elemeny 3. Meody doboru zmiennych do modelu ekonomerycznego. 4. Szacownie paramerów srukuralnych MNK. Weryfikacja modelu KMNK 6. Prognozowanie
VII. ZAGADNIENIA DYNAMIKI
 Konderla P. Meoda Elemenów Skończonych, eoria i zasosowania 47 VII. ZAGADNIENIA DYNAMIKI. Równanie ruchu dla zagadnienia dynamicznego Q, (7.) gdzie M NxN macierz mas, C NxN macierz łumienia, K NxN macierz
Konderla P. Meoda Elemenów Skończonych, eoria i zasosowania 47 VII. ZAGADNIENIA DYNAMIKI. Równanie ruchu dla zagadnienia dynamicznego Q, (7.) gdzie M NxN macierz mas, C NxN macierz łumienia, K NxN macierz
MOŻLIWOŚCI DIAGNOZOWANIA SYSTEMÓW NAWIGACJI INERCJALNEJ NA BAZIE ANALIZY WARTOŚCI BŁĘDÓW SCHULERA
 Andrej SZELMANOWSKI Instytut Technicny Wojsk Lotnicych PRACE NAUKOWE ITWL Zesyt 33, s. 159 172, 2013 r. DOI 10.2478/afit-2013-0009 MOŻLIWOŚCI DIAGNOZOWANIA SYSTEMÓW NAWIGACJI INERCJALNEJ NA BAZIE ANALIZY
Andrej SZELMANOWSKI Instytut Technicny Wojsk Lotnicych PRACE NAUKOWE ITWL Zesyt 33, s. 159 172, 2013 r. DOI 10.2478/afit-2013-0009 MOŻLIWOŚCI DIAGNOZOWANIA SYSTEMÓW NAWIGACJI INERCJALNEJ NA BAZIE ANALIZY
PRĘDKOŚĆ PRZEPŁYWU OLEJU W SZCZELINIE ŁOŻYSKA PRZY NIESTACJONARNYM LAMINARNYM SMAROWANIU
 MODEOWANIE INŻYNIERSKIE ISSN 896 77X 8 s. 95 Gliwice 9 PRĘDKOŚĆ PRZEPŁYWU OEJU W SZCZEINIE ŁOŻYSKA PRZY NIESTACJONARNYM AMINARNYM SMAROWANIU PAWEŁ KRASOWSKI Kaedra Podsaw Tecnii Aademia Morsa w Gdyni e
MODEOWANIE INŻYNIERSKIE ISSN 896 77X 8 s. 95 Gliwice 9 PRĘDKOŚĆ PRZEPŁYWU OEJU W SZCZEINIE ŁOŻYSKA PRZY NIESTACJONARNYM AMINARNYM SMAROWANIU PAWEŁ KRASOWSKI Kaedra Podsaw Tecnii Aademia Morsa w Gdyni e
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
AKADEMIA MORSKA W SZCZECINIE
 AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 12 Ocena dokładności wskazań odbiornika GPSMAP 230 systemu GPS Szczecin 2006 Ocena dokładności
AKADEMIA MORSKA W SZCZECINIE Instytut Inżynierii Ruchu Morskiego Zakład Urządzeń Nawigacyjnych Ćwiczenie nr 12 Ocena dokładności wskazań odbiornika GPSMAP 230 systemu GPS Szczecin 2006 Ocena dokładności
MIESZANY PROBLEM POCZĄTKOWO-BRZEGOWY W TEORII TERMOKONSOLIDACJI. ZAGADNIENIE POCZĄTKOWE
 Górnictwo i Geoinżynieria ok 33 Zesyt 1 9 Jan Gasyński* MIESZANY POBLEM POCZĄKOWO-BZEGOWY W EOII EMOKONSOLIDACJI. ZAGADNIENIE POCZĄKOWE 1. Wstęp Analia stanów naprężenia i odkstałcenia w gruncie poostaje
Górnictwo i Geoinżynieria ok 33 Zesyt 1 9 Jan Gasyński* MIESZANY POBLEM POCZĄKOWO-BZEGOWY W EOII EMOKONSOLIDACJI. ZAGADNIENIE POCZĄKOWE 1. Wstęp Analia stanów naprężenia i odkstałcenia w gruncie poostaje
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
POMIAR PARAMETRÓW SYGNAŁOW NAPIĘCIOWYCH METODĄ PRÓKOWANIA I CYFROWEGO PRZETWARZANIA SYGNAŁU
 Pomiar paramerów sygnałów napięciowych. POMIAR PARAMERÓW SYGNAŁOW NAPIĘCIOWYCH MEODĄ PRÓKOWANIA I CYFROWEGO PRZEWARZANIA SYGNAŁU Cel ćwiczenia Poznanie warunków prawidłowego wyznaczania elemenarnych paramerów
Pomiar paramerów sygnałów napięciowych. POMIAR PARAMERÓW SYGNAŁOW NAPIĘCIOWYCH MEODĄ PRÓKOWANIA I CYFROWEGO PRZEWARZANIA SYGNAŁU Cel ćwiczenia Poznanie warunków prawidłowego wyznaczania elemenarnych paramerów
WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D
 Andrzej KOMOREK, Rafał KOWALIK, Rafał BIEŃCZAK WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D W artykule omówiono wyniki z badań rzeczywistych dotyczących dokładności odbiornika GNSS
Andrzej KOMOREK, Rafał KOWALIK, Rafał BIEŃCZAK WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D W artykule omówiono wyniki z badań rzeczywistych dotyczących dokładności odbiornika GNSS
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18
 : Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
: Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
WPŁYW NACISKÓW POWIERZCHNIOWYCH I PRĘDKOŚCI POŚLIZGU NA REDUKCJĘ SIŁY TARCIA PRZY DRGANIACH NORMALNYCH
 MODELOWANIE INŻYNIERSKIE 07 nr 64, ISSN 896-77X WPŁYW NACISKÓW POWIERZCHNIOWYCH I PRĘDKOŚCI POŚLIZGU NA REDUKCJĘ SIŁY TARCIA PRZY DRGANIACH NORMALNYCH Marta Abrahamowic a, Marius Leus b Katedra Mechaniki
MODELOWANIE INŻYNIERSKIE 07 nr 64, ISSN 896-77X WPŁYW NACISKÓW POWIERZCHNIOWYCH I PRĘDKOŚCI POŚLIZGU NA REDUKCJĘ SIŁY TARCIA PRZY DRGANIACH NORMALNYCH Marta Abrahamowic a, Marius Leus b Katedra Mechaniki
DODATEK 6. Pole elektryczne nieskończenie długiego walca z równomiernie rozłożonym w nim ładunkiem objętościowym. Φ = = = = = π
 DODATEK 6 Pole elektycne nieskońcenie długiego walca ównomienie ołożonym w nim ładunkiem objętościowym Nieskońcenie długi walec o pomieniu jest ównomienie naładowany ładunkiem objętościowym o stałej gęstości
DODATEK 6 Pole elektycne nieskońcenie długiego walca ównomienie ołożonym w nim ładunkiem objętościowym Nieskońcenie długi walec o pomieniu jest ównomienie naładowany ładunkiem objętościowym o stałej gęstości
 Ą Ż ń ś Ś Ą Ę ś ń ś ń ź ź ś ś ń Ą ś Ę ń ś Ś Ń ź ś ś ń ś ń Ś ń ś ś ń Ą ź Ł ś ń ś Ń ź ń ś ć ś ń ź Ś ś ś ś ś ś ń ść Ś ś ń ń ś ń ść Ś ź ś ś ń Ą ś Ś ś ń ś Ę ś ć ś ś Ś ś ś ć ń ść ś ń ś ś ź Ą ń ń ź Ń ś ś ń Ś
Ą Ż ń ś Ś Ą Ę ś ń ś ń ź ź ś ś ń Ą ś Ę ń ś Ś Ń ź ś ś ń ś ń Ś ń ś ś ń Ą ź Ł ś ń ś Ń ź ń ś ć ś ń ź Ś ś ś ś ś ś ń ść Ś ś ń ń ś ń ść Ś ź ś ś ń Ą ś Ś ś ń ś Ę ś ć ś ś Ś ś ś ć ń ść ś ń ś ś ź Ą ń ń ź Ń ś ś ń Ś