SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
|
|
|
- Kamil Świątek
- 5 lat temu
- Przeglądów:
Transkrypt


1 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1
2 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
3 Można skorzystać z niepełnej analogii do pomiarów naziemnymi dalmierzami elektromagnetycznymi. Dalmierze naziemne są urządzeniami aktywnymi wysyłającymi promieniowanie elektromagnetyczne do lustra i rejestrującymi promieniowanie odbite. W wielu dalmierzach pomiar odbywa się poprzez pomiar interwału czasu przebiegu fali elektromagnetycznej od dalmierza do lustra i z powrotem lub poprzez porównanie fazy fali powracającej z wysłaną. W systemie GPS pomiar odległości obejmuje tylko połowę tego procesu - odbiór fali wysyłanej przez satelitę. Druga połowa jest zastąpiona poprzez bardzo precyzyjną synchronizację zegarów w obu punktach mierzonego odcinka: zegara atomowego na satelicie i kwarcowego w odbiorniku. 3
4 W rzeczywistości proces ten jest o wiele bardziej złożony. Stosowane są różne techniki pozyskiwania wartości wielkości mierzonych. Istotne są też szczegóły i elementy procesu pomiarowego. Rozróżnia się kilka typów wielkości mierzonych techniką GPS: - pseudoodległości z pomiarem kodów, - fazy częstotliwości fali nośnej lub różnice faz, - różnice pseudoodległości ze zliczeniami dopplerowskimi, - różnice przesunięć sygnału z pomiarów interferencyjnych. Bardziej ogólnie te typy wielkości można określić dwoma kategoriami: - pomiary pseudoodległości - pomiary fazy. 4
5 Pseudoodległości satelity GPS od anteny odbiornika Tryb pracy odbiornika GPS zwany korelacyjnym. Pomiary odbiornikiem pracującym w takim trybie polegają na porównaniu (korelacji) jednego lub obydwu sygnałów kodowych mających postać tzw. PRN (Pseudo-Random- Noise), generowanych przez satelitę z sygnałami o takiej samej postaci wytwarzanymi przez odbiornik (replica code). Gdy tylko odbiornik zidentyfikuje satelitarny PRN, rozpoczyna się w odbiorniku (na danym kanale) generowanie replica code, tzn. również PRN, jednak opartego na częstotliwości kwarcowego oscylatora odbiornika. Replica code jest następnie w odbiorniku przesuwany aż do momentu maksymalnej jego korelacji z odebranym z satelity PRN. 5
6 Wielkością mierzoną jest przesunięcie czasu (time delay). Informacja, jaką niesie każdy z kodów (C/A i P) albo PRN, zawiera moment propagacji sygnału t s odniesiony do s t k czasu systemu GPS wspólnego dla wszystkich satelitów systemu. 6
7 Nominalny moment transmisji sygnału t s. Nominalny czas odbioru tego sygnału t k. Różnica tych momentów pomnożona przez prędkość fali elektromagnetycznej c to pseudoodległość P r. P r = (t k - t s )c 7
8 Oryginalny, docierający do odbiornika PRN pochodzi od zegara atomowego satelity, lecz jest zniekształcony poprzez ośrodek (troposferę i jonosferę). Czym różni się pseudoodległość od odległości geometrycznej r satelity od stacji? Oprócz różnorakich błędów pomiarowych, których łączny wpływ oznaczymy przez ε r, trzeba brać pod uwagę następujące błędy: błąd czasu systemu GPS -, błędy refrakcji troposferycznej -, błędy refrakcji jonosferycznej -, błąd synchronizacji zegarów satelity i odbiornika -. t s r trop r ion t k Można zatem napisać następujący związek pomiędzy odległością i pseudoodległością, który jest pomocny w zrozumieniu istoty pseudoodległości: 8
9 Równanie pseudoodległości Błędy wynikające z opóźnień spowodowanych wpływami jonosfery na propagację fali elektromagnetycznej podlegają eliminacji (a już na pewno znacznej redukcji) wykorzystując pomiary na dwu częstotliwościach. Wpływy atmosfery także udaje się znacznie osłabić poprzez uwzględnienie w procesie wyznaczania pseudoodległości pewnych modeli atmosfery sparametryzowanych w funkcji ciśnienia, temperatury i wilgotności mierzonych na stanowisku odbiornika GPS. Dlatego też przez należy rozumieć te szczątkowe systematyczne wpływy obu refrakcji, które nie zostały objęte ich modelami. Zasadnicze wpływy obciążające pseudoodległość to te, które wiążą się z synchronizacją zegarów: satelitarnego i odbiornika. 9
10 Równanie pseudoodległości Na jednym stanowisku pomiarowym, dla wszystkich satelitów GPS obserwowanych jednocześnie, bądź sukcesywnie przy jednym dowiązaniu skal czasu obu zegarów błąd pseudoodległości t k c będzie stały. Mniejszy udział mają tutaj błędy systemu czasu GPS opartego o zegary atomowe a większy udział błędy zegara odbiornika. Błędy traktować można jako stałe w pewnym, nawet znacznym interwale czasu. Możemy zatem rozpatrywać łącznie pewien stały na danym stanowisku błąd odległości: który jednocześnie zawiera istotę pseudoodległości, gdyż pominąwszy lub uwzględniwszy wcześniej jonosferyczne i atmosferyczne zakłócenia propagacji sygnałów, otrzymamy: 10
11 Równanie pseudoodległości Można uważać, że t s kc zawiera sumę systematycznych błędów pomiaru odległości, zaś wymienione błędy czasu stanowią główny składnik tej sumy. Przypadkowe błędy obserwacyjne ε r, będą mogły znaleźć odzwierciedlenie w wyrównaniu obserwacji na stanowisku w przypadku, gdy liczba obserwacji przekroczy liczbę niewiadomych. 11
12 Rozwiązanie nawigacyjne, dotyczące jednoczesnej obserwacji przynajmniej czwórki satelitów GPS Oznaczywszy przez: współrzędne prostokątne czterech widocznych nad horyzontem satelitów GPS, wyznaczone na podstawie depesz satelitarnych, zaś przez: współrzędne prostokątne stacji obserwacyjnej K, odległość i-tego satelity od stacji wyrazimy poprzez: 12
13 Rozwiązanie nawigacyjne, dotyczące jednoczesnej obserwacji przynajmniej czwórki satelitów GPS Możemy napisać cztery równania pseudoodległości: I można wyznaczyć zarówno pozycję stacji jak i poprawkę pseudoodległości. 13
14 Dla ciągłych obserwacji na danym stanowisku mamy jedną tylko poprawkę ze względu na synchronizację zegara odbiornika z systemem czasu GPS i ze względu na błąd czasu systemu. Obserwując synchronicznie większą liczbę satelitów GPS, rozwiązanie uzyskalibyśmy stosując metodę najmniejszych kwadratów. W rozwiązaniu nawigacyjnym należy uwzględnić opóźnienia spowodowane przez jonosferę i troposferę stosując odpowiednie modele. Dokładność wyznaczenia pozycji zależy ponadto od geometrycznej konfiguracji satelitów i od dokładności efemeryd zawartych w depeszy satelitarnej. 14
15 Dokładność pseudoodległości z pomiarów kodowych to zwykle około 1% długości bita kodu (1% of chip lenght). W związku z tym chip długości 300 m dla C/A pozwala uzyskać dokładność 3 m a chip o długości 30 m dla kodu P dokładność do 0,3 m. Wykazano, że możliwe jest z uzyskanie dokładności pseudoodległości nawet do około 0,1% długości kodu. Stosując kod P można się liczyć z błędem wyznaczenia pozycji (absolutnej) około metrów, zaś większym o jeden rząd, gdy korzystamy tylko z kodu C/A. 15
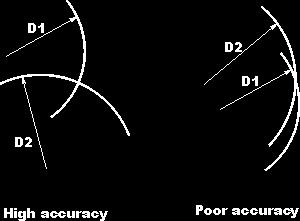
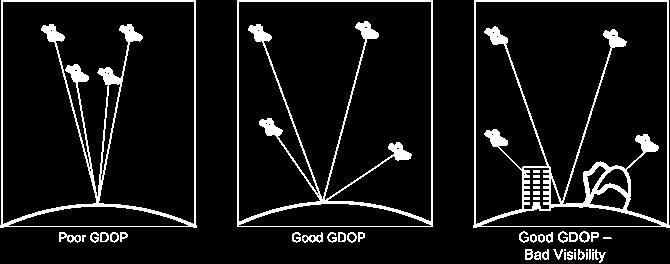
16 Wpływ geometrycznej konfiguracji satelitów na dokładność wyznaczania pozycji odbiornika W literaturze związanej z systemami GNSS, wcześniej GPS stosuje się tzw. współczynniki DOP przejęte z terminologii stosowanej w nawigacji jako parametr Dilution of Precision (DOP). Określa się za pomocą współczynnika DOP odchylenia standardowe σ odpowiednio dla pozycji horyzontalnej, wysokościowego składnika pozycji albo pozycji przestrzennej, także dla wyznaczenia czasu jako: przy czym σ 0 oznacza odchylenie standardowe obserwacji pseudoodległości. 16
17 Biorąc równania obserwacyjne pseudoodległości: można zestawić macierz współczynników A zaś przy większej niż 4 liczbie obserwacji pseudoodległości, macierz równań normalnych A. Macierz kowariancyjną C wektora można zapisać: Wyznaczenie odpowiednich odchyleń standardowych zmiennych w innym, nieortokartezjańskim układzie współrzędnych na podstawie macierzy C jest sprawą 17 odpowiedniego zastosowania prawa transformacji wariancji.
18 Wskaźniki stosowane w oszacowaniu dokładności wyznaczenia pozycji w reżimie nawigacyjnym Błąd średni wyznaczenia pozycji przestrzennej PDOP Współczynnik PDOP ma szczególne znaczenie podczas śledzenia jakości procesu obserwacji, głównie stacjonarnych, geodezyjnych. PDOP obliczany jest sukcesywnie i można wartość tego współczynnika na bieżąco kontrolować na wyświetlaczu odbiornika GNSS. 18
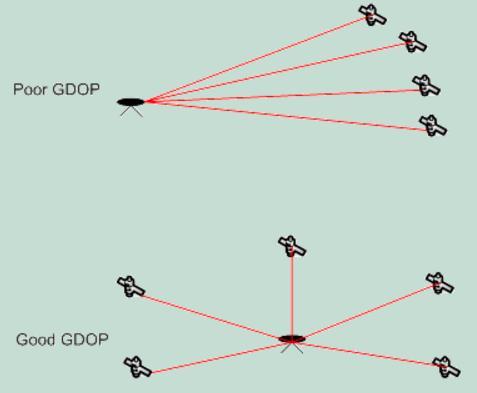
19 Współczynnik PDOP posiada interpretację geometryczną jako liczba proporcjonalna do odwrotności objętości wielościanu rozpiętego na punktach stanowiących pozycje obserwowanych satelitów GPS i na punkcie wyznaczanej stacji. Mniejsza wartość PDOP świadczy o lepszej konfiguracji satelitów względem stacji wyznaczanej. Ze względu na wpływy troposfery wykorzystuje się obserwacje satelitów o wysokościach horyzontalnych większych niż
20 Błędy średnie pozycji horyzontalnej i wysokości można wyznaczyć dokonując transformacji macierzy C do lokalnego układu horyzontalnego. Wynik transformacji związanych z pozycją poziomą i wysokością zapiszemy w macierzy Q. Oznaczenia n, e odnoszą się do składowych odpowiednio: północnej i wschodniej, h dotyczy wysokości. Błąd średni pozycji horyzontalnej HDOP Błąd średni wysokości elipsoidalnej VDOP 20
21 TDOP - odpowiednie wyrażenie dla czasu t będzie miało postać: c Rozważa się także ogólny parametr GDOP (Geometric Dilution of Precision), który odzwierciedla zarówno geometryczną jakość wcięcia wyznaczającego pozycję, jak i dokładność wyznaczenia czasu. 21
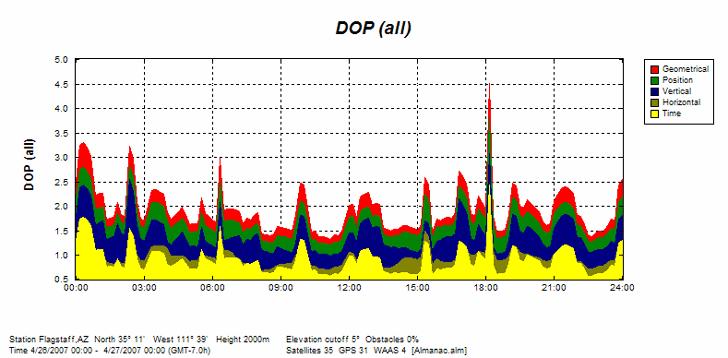
22 Wartości współczynników PDOP, HDOP i VDOP można wyznaczyć wcześniej, przygotowując alert obserwacyjny na podstawie przybliżonych pozycji satelitów i przybliżonej pozycji stacji obserwacyjnej. Odpowiednie programy zawarte są z reguły w pakietach firmowych producentów odbiorników GNSS, dostępne są również jako freeware a także on-line. GDOP Geometrical Dilution of Precision (geometryczny) PDOP Positional Dilution of Precision (pozycyjny) TDOP Time Dilution of Precision (czasowy) HDOP Horizontal Dilution of Precision (w poziomie) VDOP Vertical Dilution of Precision (w pionie) 22
23 23
24 24
25 25
26 26
27 NTS_AND_THEIR_IMPACT_ON_SURVEY_SERVICE_PROVIDERS_AND_SUR 27 VEYORS/figures?lo=1
28 Wartości DOP powinny być używane jedynie jako wskazanie kiedy odbiornik GPS prawdopodobnie nie wyznaczy pozycji o dobrej dokładności, nie powinny być stosowane jako jedyne miary opisujące jakość czy dokładność aktualnej pozycji. Dlaczego, wartość DOP (uzależniona od geometrii satelitów) może być myląca, jeżeli potraktuje się ją jako miarę dokładności pozycji? 28
29 1. W pomiarach niektórych pseudoodległości mogą występować błędy przypadkowe wpływające na zmniejszenie dokładności pozycji nie będzie to uwzględnione w wartości DOP. 2. Niska elewacja satelitów przeważnie wpłynie na poprawę geometrycznej konfiguracji, jednakże odległości zmierzone do tych satelitów obarczone będą większymi błędami atmosferycznymi w porównaniu z satelitami położonymi wyżej nad widnokręgiem co ponownie zmniejszy dokładność pozycji. 3. DOP nie wskazuje też wartości błędów wprowadzanych do wszystkich pomiarów w wyniku włączenia SA. 29
30 Właściwą miarą dokładności jest odchylenie standardowe różnych komponentów pozycji obliczone na podstawie ich macierzy kowariancji. 30

31 LITERATURA K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie, Warszawa B. Hofmann-Wellenhof, H. Lichtenegger, E. Wasl, GNSS Global Navigation Satellite Systems GPS, GLONASS, Galileo and more, Springer, Wien - New York P. Zalewski, Globalny Nawigacyjny System Satelitarny GPS, [dostęp: ] [dostęp: ] [dostęp: ] [dostęp: ] ACT_ON_SURVEY_SERVICE_PROVIDERS_AND_SURVEYORS/figures?lo=1 [dostęp: ] 31
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
BADANIE WPŁ YWU GEOMETRII SYSTEMU NA DOKŁ ADNOŚĆ OKREŚ LANIA POZYCJI ZA POMOCĄ ODBIORNIKA GPS
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT NOWAK Aleksander 1 GNSS, GPS, Dokładność, Błędy wyznaczeń WPŁYW KĄTA ODCIĘCIA HORYZONTU NA DOKŁADNOŚĆ WYZNACZEŃ
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT NOWAK Aleksander 1 GNSS, GPS, Dokładność, Błędy wyznaczeń WPŁYW KĄTA ODCIĘCIA HORYZONTU NA DOKŁADNOŚĆ WYZNACZEŃ
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Przyswojenie wiedzy na temat serwisów systemu GPS i charakterystyk z nimi związanych
 C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów budowlanych. Str. 1.Sprawozdanie techniczne 2-3
 Rok akademicki 2011/2012 Grupa BD1 LP3 Środa 10.15-13.00 Katedra Geodezji im. Kaspra WEIGLA ĆWICZENIE nr 2 Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów
Rok akademicki 2011/2012 Grupa BD1 LP3 Środa 10.15-13.00 Katedra Geodezji im. Kaspra WEIGLA ĆWICZENIE nr 2 Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Nawigacja: ocena dokładności pozycji. dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie
 Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:") PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS
 WRONA Maciej 1 ANESZKO Aneta Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS WSTĘP Wraz ze wzrostem aplikacji wykorzystujących Globalny System Nawigacji Satelitarnej na
WRONA Maciej 1 ANESZKO Aneta Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS WSTĘP Wraz ze wzrostem aplikacji wykorzystujących Globalny System Nawigacji Satelitarnej na
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych
 Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii (2018) Autor prezentacji :dr hab. Paweł Korecki dr Szymon Godlewski e-mail: szymon.godlewski@uj.edu.pl
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii (2018) Autor prezentacji :dr hab. Paweł Korecki dr Szymon Godlewski e-mail: szymon.godlewski@uj.edu.pl
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 3 W zależności od celu, jakiemu wyniki pomiarów mają służyć,
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 9 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 3 W zależności od celu, jakiemu wyniki pomiarów mają służyć,
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Estymacja wektora stanu w prostym układzie elektroenergetycznym
 Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych znaków regulacji osi toru Ig-7
 Załącznik do zarządzenia Nr 27/2012 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 19 listopada 2012 r. Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych
Załącznik do zarządzenia Nr 27/2012 Zarządu PKP Polskie Linie Kolejowe S.A. z dnia 19 listopada 2012 r. Standard techniczny określający zasady i dokładności pomiarów geodezyjnych dla zakładania wielofunkcyjnych
1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18
 : Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
: Przedmowa...... 11 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ Z historii geodezji... 13 1.1. Kształt Ziemi. Powierzchnie odniesienia. Naukowe i praktyczne zadania geodezji. Podział geodezji wyższej... 18 1.2.
Sprawdzenie narzędzi pomiarowych i wyznaczenie niepewności rozszerzonej typu A w pomiarach pośrednich
 Podstawy Metrologii i Technik Eksperymentu Laboratorium Sprawdzenie narzędzi pomiarowych i wyznaczenie niepewności rozszerzonej typu A w pomiarach pośrednich Instrukcja do ćwiczenia nr 4 Zakład Miernictwa
Podstawy Metrologii i Technik Eksperymentu Laboratorium Sprawdzenie narzędzi pomiarowych i wyznaczenie niepewności rozszerzonej typu A w pomiarach pośrednich Instrukcja do ćwiczenia nr 4 Zakład Miernictwa
Globalny Nawigacyjny System Satelitarny GPS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
WYTYCZNE TECHNICZNE G-1.12
 GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
GŁÓWNY GEODETA KRAJU WYTYCZNE TECHNICZNE G-1.12 Pomiary satelitarne oparte na systemie precyzyjnego pozycjonowania ASG- EUPOS (Projekt z dnia 1.03.2008 r. z poprawkami) Wytyczne opracował zespół w składzie:
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Rys Szkic sieci kątowo-liniowej. Nr X [m] Y [m]
![Rys Szkic sieci kątowo-liniowej. Nr X [m] Y [m]](/thumbs/71/64145392.jpg "Rys Szkic sieci kątowo-liniowej. Nr X [m] Y [m]") 5.14. Ścisłe wyrównanie sieci kątowo-liniowej z wykorzystaniem programu komputerowego B. Przykłady W prezentowanym przykładzie należy wyznaczyć współrzędne płaskie trzech punktów (1201, 1202 i 1203) sieci
5.14. Ścisłe wyrównanie sieci kątowo-liniowej z wykorzystaniem programu komputerowego B. Przykłady W prezentowanym przykładzie należy wyznaczyć współrzędne płaskie trzech punktów (1201, 1202 i 1203) sieci
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D
 Andrzej KOMOREK, Rafał KOWALIK, Rafał BIEŃCZAK WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D W artykule omówiono wyniki z badań rzeczywistych dotyczących dokładności odbiornika GNSS
Andrzej KOMOREK, Rafał KOWALIK, Rafał BIEŃCZAK WYZNACZANIE DOKŁADNOŚCI POZYCJI OBIEKTÓW RUCHOMYCH W PRZESTRZENI 3D W artykule omówiono wyniki z badań rzeczywistych dotyczących dokładności odbiornika GNSS
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1
 w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1
 w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.
Teoria błędów. Wszystkie wartości wielkości fizycznych obarczone są pewnym błędem.
 Teoria błędów Wskutek niedoskonałości przyrządów, jak również niedoskonałości organów zmysłów wszystkie pomiary są dokonywane z określonym stopniem dokładności. Nie otrzymujemy prawidłowych wartości mierzonej
Teoria błędów Wskutek niedoskonałości przyrządów, jak również niedoskonałości organów zmysłów wszystkie pomiary są dokonywane z określonym stopniem dokładności. Nie otrzymujemy prawidłowych wartości mierzonej
Aktualne produkty jonosferyczne dla GNSS
 Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wizualizacja i analiza danych lokalizacyjnych odbiorników GPS
 ZESPÓŁ LABORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LABORATORIUM Lokalizacji i zarządzania środkami transportu INSTRUKCJA DO ĆWICZENIA
ZESPÓŁ LABORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LABORATORIUM Lokalizacji i zarządzania środkami transportu INSTRUKCJA DO ĆWICZENIA
Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego
 Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Bi u l e t y n WAT Vo l. LXI, Nr 1, 2012 Badania dokładności pozycjonowania techniką PPP w zależności od długości sesji obserwacyjnej oraz wykorzystanych systemów pozycjonowania satelitarnego Katarzyna
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
BŁĘDY W POMIARACH BEZPOŚREDNICH
 Podstawy Metrologii i Technik Eksperymentu Laboratorium BŁĘDY W POMIARACH BEZPOŚREDNICH Instrukcja do ćwiczenia nr 2 Zakład Miernictwa i Ochrony Atmosfery Wrocław, listopad 2010 r. Podstawy Metrologii
Podstawy Metrologii i Technik Eksperymentu Laboratorium BŁĘDY W POMIARACH BEZPOŚREDNICH Instrukcja do ćwiczenia nr 2 Zakład Miernictwa i Ochrony Atmosfery Wrocław, listopad 2010 r. Podstawy Metrologii
System 1200 Newsletter Nr 54 Sieci RTK - Przykłady studialne
 NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
NEWSLETTERY SIECI RTK - PRZYPOMNIENIE Niniejszy numer Newslettera kończy trzyczęściową serię dotyczącą sieci RTK. Zanim zagłębimy się w szczegóły tego numeru przypomnimy tematy dwóch poprzednich numerów.
Sposoby opisu i modelowania zakłóceń kanałowych
 INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI Instrukcja laboratoryjna z przedmiotu Podstawy Telekomunikacji Sposoby opisu i modelowania zakłóceń kanałowych Warszawa 2010r. 1. Cel ćwiczeń: Celem ćwiczeń
INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI Instrukcja laboratoryjna z przedmiotu Podstawy Telekomunikacji Sposoby opisu i modelowania zakłóceń kanałowych Warszawa 2010r. 1. Cel ćwiczeń: Celem ćwiczeń
Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
 Charakterystyka mierników do badania oświetlenia Obiektywne badania warunków oświetlenia opierają się na wynikach pomiarów parametrów świetlnych. Podobnie jak każdy pomiar, również te pomiary, obarczone
Charakterystyka mierników do badania oświetlenia Obiektywne badania warunków oświetlenia opierają się na wynikach pomiarów parametrów świetlnych. Podobnie jak każdy pomiar, również te pomiary, obarczone
I. Informacje ogólne. Strona 1 z 9
 PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL-EVRF2007-NH I. Informacje ogólne
PRZELICZANIE SZCZEGÓŁOWEJ OSNOWY WYSOKOŚCIOWEJ, POMIAROWEJ OSNOWY WYSOKOŚCIOWEJ ORAZ RZĘDNYCH SZCZEGÓŁÓW SYTUACYJNO- WYSOKOŚCIOWYCH DO PAŃSTWOWEGO UKŁADU WYSOKOŚCIOWEGO PL-EVRF2007-NH I. Informacje ogólne
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Wstęp do teorii niepewności pomiaru. Danuta J. Michczyńska Adam Michczyński
 Wstęp do teorii niepewności pomiaru Danuta J. Michczyńska Adam Michczyński Podstawowe informacje: Strona Politechniki Śląskiej: www.polsl.pl Instytut Fizyki / strona własna Instytutu / Dydaktyka / I Pracownia
Wstęp do teorii niepewności pomiaru Danuta J. Michczyńska Adam Michczyński Podstawowe informacje: Strona Politechniki Śląskiej: www.polsl.pl Instytut Fizyki / strona własna Instytutu / Dydaktyka / I Pracownia
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia III. Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia III Pomiar natężenia przepływu za pomocą sondy poboru ciśnienia Sonda poboru ciśnienia Sonda poboru ciśnienia (Rys. ) jest to urządzenie
STATYSTYKA MATEMATYCZNA ZESTAW 0 (POWT. RACH. PRAWDOPODOBIEŃSTWA) ZADANIA
 ZADANIA") STATYSTYKA MATEMATYCZNA ZESTAW 0 (POWT. RACH. PRAWDOPODOBIEŃSTWA) ZADANIA Zadanie 0.1 Zmienna losowa X ma rozkład określony funkcją prawdopodobieństwa: x k 0 4 p k 1/3 1/6 1/ obliczyć EX, D X. (odp. 4/3;
STATYSTYKA MATEMATYCZNA ZESTAW 0 (POWT. RACH. PRAWDOPODOBIEŃSTWA) ZADANIA Zadanie 0.1 Zmienna losowa X ma rozkład określony funkcją prawdopodobieństwa: x k 0 4 p k 1/3 1/6 1/ obliczyć EX, D X. (odp. 4/3;
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS
 Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Moduł modelowania i predykcji stanu troposfery projekt ASG+ Budowa modułów wspomagania serwisów czasu rzeczywistego systemu ASG-EUPOS Jarosław BOSY Witold ROHM Jan KAPŁON Jan SIERNY Instytut Geodezji i
Linia pozycyjna. dr inż. Paweł Zalewski. w radionawigacji
 Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
LABORATORIUM Z FIZYKI
 LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
LABORATORIUM Z FIZYKI LABORATORIUM Z FIZYKI I PRACOWNIA FIZYCZNA C w Gliwicach Gliwice, ul. Konarskiego 22, pokoje 52-54 Regulamin pracowni i organizacja zajęć Sprawozdanie (strona tytułowa, karta pomiarowa)
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
Wyznaczanie prędkości dźwięku w powietrzu
 Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
ĆWICZENIE 13 TEORIA BŁĘDÓW POMIAROWYCH
 ĆWICZENIE 13 TEORIA BŁĘDÓW POMIAROWYCH Pomiary (definicja, skale pomiarowe, pomiary proste, złożone, zliczenia). Błędy ( definicja, rodzaje błędów, błąd maksymalny i przypadkowy,). Rachunek błędów Sposoby
ĆWICZENIE 13 TEORIA BŁĘDÓW POMIAROWYCH Pomiary (definicja, skale pomiarowe, pomiary proste, złożone, zliczenia). Błędy ( definicja, rodzaje błędów, błąd maksymalny i przypadkowy,). Rachunek błędów Sposoby
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu
 Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Analiza współrzędnych środka mas Ziemi wyznaczanych technikami GNSS, SLR i DORIS oraz wpływ zmian tych współrzędnych na zmiany poziomu oceanu Agnieszka Wnęk 1, Maria Zbylut 1, Wiesław Kosek 1,2 1 Wydział
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych
 Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii 2007 Paweł Korecki 2013 Andrzej Kapanowski Po co jest Pracownia Fizyczna? 1. Obserwacja zjawisk i
Podstawy opracowania wyników pomiarów z elementami analizy niepewności pomiarowych dla studentów Chemii 2007 Paweł Korecki 2013 Andrzej Kapanowski Po co jest Pracownia Fizyczna? 1. Obserwacja zjawisk i
ZAŁOŻENIA I STAN REALIZACJI PRAC W ZAKRESIE OPRACOWANIA SERWISU POZYCJONOWANIA Z WYKORZYSTANIEM TELEFONÓW GSM Z MODUŁEM GNSS
 Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 2 ZAŁOŻIA I STA RALIZACJI PRAC W ZAKRSI OPRACOWAIA SRWISU POZYCJOOWAIA Z WYKORZYSTAIM TLFOÓW GSM Z MODUŁM GSS Saczuk
Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 2 ZAŁOŻIA I STA RALIZACJI PRAC W ZAKRSI OPRACOWAIA SRWISU POZYCJOOWAIA Z WYKORZYSTAIM TLFOÓW GSM Z MODUŁM GSS Saczuk
Analiza składowych głównych. Wprowadzenie
 Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
Wprowadzenie jest techniką redukcji wymiaru. Składowe główne zostały po raz pierwszy zaproponowane przez Pearsona(1901), a następnie rozwinięte przez Hotellinga (1933). jest zaliczana do systemów uczących
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
LABORATORIUM PODSTAW TELEKOMUNIKACJI
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego w Warszawie Wydział Elektroniki LABORATORIUM PODSTAW TELEKOMUNIKACJI Grupa Podgrupa Data wykonania ćwiczenia Ćwiczenie prowadził... Skład podgrupy:
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego w Warszawie Wydział Elektroniki LABORATORIUM PODSTAW TELEKOMUNIKACJI Grupa Podgrupa Data wykonania ćwiczenia Ćwiczenie prowadził... Skład podgrupy:
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
X Y 4,0 3,3 8,0 6,8 12,0 11,0 16,0 15,2 20,0 18,9
 Zadanie W celu sprawdzenia, czy pipeta jest obarczona błędem systematycznym stałym lub zmiennym wykonano szereg pomiarów przy różnych ustawieniach pipety. Wyznacz równanie regresji liniowej, które pozwoli
Zadanie W celu sprawdzenia, czy pipeta jest obarczona błędem systematycznym stałym lub zmiennym wykonano szereg pomiarów przy różnych ustawieniach pipety. Wyznacz równanie regresji liniowej, które pozwoli
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS
 PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE