3. Podstawy projektowania silników z magnesami trwałymi. Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
|
|
|
- Kazimiera Osińska
- 7 lat temu
- Przeglądów:
Transkrypt
1 3. Podstawy projektowania silników z magnesami trwałymi
2 Zestawienie danych wejściowych Rodzaj pracy (silnik / prądnica) Moc Napięcie Częstotliwość Dane znamionowe P N U N f N Liczba uzwojeń fazowych m 1 Prędkość obrotowa Wznios wału Dane materiałowe Dopuszczalny przyrost temperatury uzwojeń Rodzaj blach elektrotechnicznych (indukcja nasycenia) Rodzaj magnesów trwałych (indukcja remanencji) Dopuszczalny przyrost temperatury magnesów Dane technologiczne Minimalna szerokość przesmyku ferromagnetycznego Współczynnik objętościowego zapełnienia żłobka miedzią Typ uzwojenia (jedno/dwuwarstwowe, rozłożone/koncentryczne) n N h w J Udop B nas B r J Mdop b min k VCu
3 Wymagania normalizacyjne International Electrotecnical Commission Tytuł Numer General requirements for rotating electrical machines IEC 34-1, IEC 85 Fixing dimensions and assignment of rated output with IM IEC 72 Terminal markings and direction of rotation of rotating electrical machines IEC 34-8 Types of construction of rotating electrical machines IEC 34-7 Method of cooling rotating electrical machinery IEC 34-6 Degrees of protection by enclosures for rotating electrical machinery IEC 34-5 Vibration severity of electrical machines IEC 34-14, ISO 2373 Noise emission limits IEC 34-9 Starting performance IEC IEC standard voltages IEC 38 Methods for determining losses and efficiency of rotating electrical machinery from test IEC 34-2
![Normalizacja wymiarów montażowych IEC 72-1 typ A[mm] B[mm] C[mm] E[mm] H[mm] 71 112 90 45 30 71 80 125 100 50 40 80 90S 140 100 56 50 90 90L 140 125 56 50 90 100L 160 140 63 60 100 112M 190 140 70 60](/docs-images/60/45227756/images/4-0.png "112 E 132S 216 140 89 80 132 B 132M 216 170 89 80 132 160M 254 210 108 110 160 H A C 160L 254 254 108 110 160 180M 279 241 121 110 180 180L 279 279 121 110 180 200M 318 267 133 110 200 200L 318 305")
4 Normalizacja wymiarów montażowych IEC 72-1 typ A[mm] B[mm] C[mm] E[mm] H[mm] S L L M E 132S B 132M M H A C 160L M L M L
5 Wymiary geometryczne silnika magnesy trwałe powierzchniowe Powiązania wymiarowe: 0.5D z + h o = H h o grubość obudowy H wznios wału Liczba par biegunów p p = f N n N Indukcja w magnesie B M = B r 1 + μ rm d M τp δ h M h M k C Warunek ciągłości strumienia B nas Rozpiętość magnesu Ż 2p b z = B nas h j 2 = B Md M Ż liczba żłobków stojana d M = τ p = πd 2p

6 Wymiary geometryczne silnika magnesy trwałe utajone t p h M d M Indukcja w magnesie Współczynnik Cartera t Ż = πd Ż B M = B r 1 + μ rm d M τp δ h M k C k C = 1 1 γ C δ t Ż γ C = b 4 t Ż b 4 t Ż 2
7 Podsumowanie wstępnego wymiarowania dopuszczalne liczby żłobków stojana Ż są określone typem uzwojenia i liczbą faz zasilania; zewnętrzna średnica stojana D z wynika z wymaganego wzniosu wału H; rozpiętość magnesu wzdłuż kierunku wirowania d m została dostosowana do podziałki biegunowej t p, a więc do średnicy wewnętrznej D; szerokość zęba b z oraz wysokość jarzma h j są również związane ze średnicą D poprzez indukcję w magnesach B M oraz oczekiwaną amplitudę indukcji w rdzeniu B nas ; indukcja w magnesie B M może być zastąpiona na podstawie prawa Ampère a indukcją remanencji B r ; szerokość otwarcia żłobków b 4 została oszacowana w powiązaniu ze średnicą D i liczbą żłobków Ż; wysokość otwarcia żłobka h 4 powinna być bliska możliwej wartości minimalnego przesmyku b min ; wysokość uzwojenia w żłobku h 1 wyznacza się z ciągu wymiarowego łączącego D z i D (niewielkie różnice w obrębie skosu głowic zębów są do pominięcia).

8 Podsumowanie wstępnego wymiarowania cd. d Do ustalenia pozostały: średnica wewnętrzna stojana D; idealna długość pakietu rdzenia l i ; wysokość magnesu h M ; szczelina pomiędzy stojanem i wirnikiem d.


9 Inne topologie maszyn z magnesami trwałymi silnik tarczowy dwustronny D l i d M Obwód magnetyczny silnika Podstawowe wymiary Stojan z uzwojeniem Granme a Program MotorSolve nie pozwala na analizę tego typu maszyny



10 Inne topologie maszyn z magnesami trwałymi silnik tubowy pakiet jarzma twornika cewka uzwojenia stojana pakiet zęba twornika magnesy t p h 1 +h 4 h j d M h M r w d Program MotorSolve nie pozwala na analizę tego typu maszyny
11 B Siła elektromotoryczna indukowana przez magnesy trwałe (1) B m Da M e 0 pda c pda M a 2k E B m 0 p Da c 2p k E B m 0 p 2p wt - k E B m -B m Znormalizowany rozkład indukcji w szczelinie wytworzony przez magnesy trwałe. SEM rotacji w skupionej cewce o N zwojach (przy pominiętym efekcie użłobkowania) e c k ( t) k B ( p t) B ( p t Da ) E E Nl r i d NS Amplituda podstawowej harmonicznej E cm1 4 2k p E B m d n Da c sin 2 c Da M sin 2 a. b. - 2k E B m e 0 2k E B m k E B m - k E B m - 2k E B m pda M pda c 0 p Przebieg siły elektromotorycznej w pojedynczej cewce indukowany przez magnesy trwałe. a. Da c Da M b. Da c Da M 2p wt
 2k E B m 2k E B m")


12 Wpływ rodzaju uzwojeń na kształt siły elektromotorycznej (SEM) 2k E B m 2k E B m Procentowa zawartość harmonicznych w przebiegu SEM fazowej Da c = Da M = p Normalizowana SEM fazowa i jej harmoniczna podstawowa
13 Współczynnik uzwojenia Przykładowe pasmo cewkowe składa się z n p =3 identycznych cewek o zwojności N przesuniętych wzajemnie w przestrzeni o kąt f c stopni elektrycznych. E p = 2 r sin E c = 2 r sin φ c n p 2 φ c 2 f c r E p E c(1 ) f c E c(2) f c Współczynnik uzwojenia q1 E p1 n E p c1 n p p sin 2 m1 sin p 2 np m Liczba żłobków na biegun i fazę q q = Ż 2pm 1 Uzwojenia o pasmach symetrycznych mają q = l. całk. Wówczas n p = q 1 Wykres wskazowy dla podstawowej harmonicznej czasowej Wartość skuteczna SEM pasma uzwojenia E p1 4 2 p n p k E q1 Dla sinusoidalnego rozkładu indukcji w szczelinie E p sin 2 n p k E q 1 c c B m M B m E c(3) Współczynnik uzwojenia dla uzwojeń o pasmach niesymetrycznych (q l. całk. ) oblicza się najczęściej metodami numerycznymi.

14 Siła elektromotoryczna reakcji twornika maszyna idealna Idealna maszyna spełnia następujące założenia: Posiada równomierną szczelinę niemagnetyczną d o pomijalnym wpływie otwarć żłobków stojana na rozkład pola magnetycznego w szczelinie; Przenikalność magnetyczna rdzeni stojana i wirnika jest nieskończenie duża, co prowadzi do liniowego modelu maszyny; Pole magnetyczne w szczelinie jest jednowymiarowe (istnieje tylko składowa radialna). i A i B H H 1A Wg. prawa Ampere a (M=A,B) H 1M H 2M δ = Ni M Wg. prawa ciągłości strumienia magnetycznego B 1M α c = B 2M 2π α c B 1M = μ 0 Ni M δ B 2M = μ 0 Ni M δ 1 α c 2π α c 2π a. b. a H 1B da a C a C +da H 2B H 2A 2p a Pole reakcji twornika w idealnej maszynie a. geometria obwodu magnetycznego, b. rozkład składowej radialnej natężenia pola magnetycznego w szczelinie wytworzonego przez dwie skupione cewki.
 }=Ni m [+1, +0.5, +0.5] T -U +V +W +U -W -V t 0-0.")
![5I m +W +V -U B d [ T ] a 0 θ n t = N K nk i k t n=1 Ż, k=1 m 1 Elementy macierzy koincydencji przyjmują wartości: K nk =+1 jeżeli w n-tym żłobku znajduje się początkowy bok cewki k-tego uzwojenia; K](/docs-images/60/45227756/images/15-1.png "nk =-1 jeżeli w n-tym żłobku znajduje się końcowy bok cewki k-tego uzwojenia; K nk = 0 jeżeli w n-tym żłobku nie znajduje się bok cewki k-tego uzwojenia.")
15 Czaso-przestrzenny rozkład indukcji w szczelinie I U t +I m maszyna idealna zasilana sinusoidalnie Chwilową wartość przepływu n-tego żłobka n (t) określa zależność I W I V { i k (t) }=I m [+1,-0.5,-0.5] T { n (t) }=Ni m [+1, +0.5, +0.5] T -U +V +W +U -W -V t 0-0.5I m +W +V -U B d [ T ] a 0 θ n t = N K nk i k t n=1 Ż, k=1 m 1 Elementy macierzy koincydencji przyjmują wartości: K nk =+1 jeżeli w n-tym żłobku znajduje się początkowy bok cewki k-tego uzwojenia; K nk =-1 jeżeli w n-tym żłobku znajduje się końcowy bok cewki k-tego uzwojenia; K nk = 0 jeżeli w n-tym żłobku nie znajduje się bok cewki k-tego uzwojenia. a 0 +da dap/6 wt B d [ T ] { i k (t) }=I m [1,-0.5,-0.5] wt 0 dap/6 { i k (t) }=I m [0.87,-0.87,0] wt 0 +da a -V -W +U +U Uzwojenie jednowarstwowe, p=2, q=1 Czasowe przebiegi indukcji w szczelinie w dwóch jej punktach odległych o p/6. Przestrzenne przebiegi indukcji w szczelinie w dwóch chwilach odległych o p/6.
16 Indukcyjność reakcji twornika maszyna idealna zasilana sinusoidalnie Dla sinusoidalnego rozkładu indukcji w szczelinie wartość skuteczna SEM pasma wynosi E p sin 2 1 n pn q1 c t plibm Nef m 1 2 w 2 p 2 np ke q1 c Bm 2p f1 1 N ef efektywna liczba zwojów pasma cewkowego Amplituda podstawowej harmonicznej przestrzennej rozkładu indukcji w szczelinie B m wynika ze wzoru otrzymanego po zastosowaniu prawa Ampere a B m = 3 π μ 0 N ef δ ef I m gdzie d ef = d k C Indukcyjność reakcji pasma twornika L pt definicyjnie jest równa L pt = N efφ m I m = 6 π 2 μ 0 τ p l i 2 N δ k ef C Maszyna z uzwojeniem o całkowitym q posiada w każdym uzwojeniu fazowym p pasm, w których indukuje się identyczna siła elektromotoryczna. Mogą one być więc połączone szeregowo lub równolegle. W pierwszym przypadku wypadkowa indukcyjność nazywana synchroniczną L s wzrośnie p razy a w drugim tyleż razy zmaleje.

17 Płaszczyzny modelu maszyny idealnej fazowa prądów stojana i przekroju poprzecznego kolejność prądów fazowych UVW I W I V Im d q Re płaszczyzna fazowa -W +V -W +V g y p +U +U a q d -U -U y p I U g -V -V d u +W +W Płaszczyzna fazowa Oś magnetyczna pasma uzwojenia fazowego d u pokrywa się z przyjętym położeniem osi Re; Im = Re e +jp/2. Oś magnetyczna wirnika silnika d oś opóźniona o tzw. kąt wewnętrznego obciążenia y p ; d = Re e -j y p. y p (0,p) kąt fazowy = liczba par biegunów * kąt geometryczny Płaszczyzna przekroju poprzecznego Oś magnetyczna pasma uzwojenia fazowego d u kierunek radialny zewnętrzny zawierający maksimum indukcji pola reakcji twornika w chwili gdy natężenie prądu w tym uzwojeniu ma wartość maksymalną. Oś magnetyczna wirnika d kierunek radialny zewnętrzny pokrywający się z kierunkiem wektora namagnesowania w biegunach wirnika. Maszyna o q całkowitym posiada p osi magnetycznych d u i d. Kąt fazowy wyprzedzenia g (ang. advance angle) jest mierzony od osi q do osi d u. g(-p/2,+p/2) γ = ψ p π 2 płaszczyzna przekroju poprzecznego p=1, q=2

18 Wykres wskazowy i moment elektromagnetyczny silnik z równomierną szczeliną EU jwl s I f I g E 0 =jwy 0 q Założenia upraszczające: Pomija się strumień rozproszenia stojana oraz spadek napięcia na rezystancji uzwojeń. W konsekwencji napięcie zasilające U jest równe SEM wypadkowej E. U d = ωl s I cos γ U q = E 0 ωl s I sin γ I d = I sin γ I q = I cos γ d Moc wewnętrzna (elektromagnetyczna) Y 0 P wewn = m 1 U d I d + U q I q = m 1 ωψ 0 I q Moment wewnętrzny (elektromagnetyczny) Współczynnik mocy M wewn = P wewn ω p cos φ = cos atan = m 1 pψ 0 I q Ψ q Ψ d γ = E 0 U cos γ




19 Maszyna z magnesami utajonymi Zastosowanie wirnika z magnesami utajonymi zmienia warunki magnesowania dla pola reakcji twornika w osiach d i q. W konsekwencji indukcyjności L tq i L td będą się istotnie różnić. Pole wypadkowe g=0 Pole reakcji twornika w osi q. L tq L td = 2.5 Pole reakcji twornika w osi d.

20 Wykres wskazowy i moment elektromagnetyczny silnik z magnesami utajonymi jwl tq I q EU jwl td I d I g f E 0 =jwy 0 q Założenia upraszczające: Pomija się strumień rozproszenia stojana oraz spadek napięcia na rezystancji uzwojeń. W konsekwencji napięcie zasilające U jest równe SEM wypadkowej E. U d = ωψ q = ωl tq I q U q = ωψ d = E 0 ωl td I d Moc wewnętrzna (elektromagnetyczna) I d = I sin γ I q = +I cos γ P wewn = m 1 U d I d + U q I q = m 1 ω Ψ d I q Ψ q I d d = m 1 ω Ψ 0 I q + 0.5I 2 L tq L td sin 2γ Y 0 Moment wewnętrzny (elektromagnetyczny) M wewn = P wewn ω p Współczynnik mocy = m 1 p Ψ 0 I q + 0.5I 2 L tq L td sin 2γ cos φ = cos atan Ψ q Ψ d γ
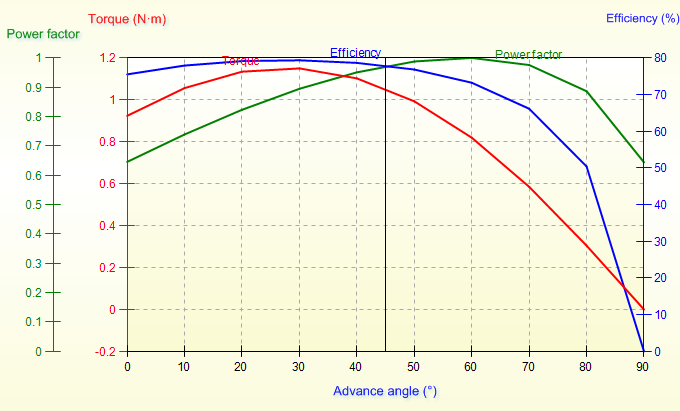




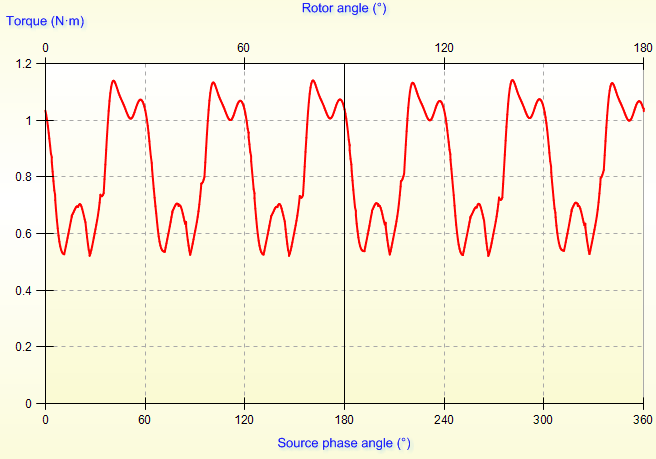
21 Zestawienie wstępnych projektów g=0 g=0 Uwagi: 1. Relatywnie niewielka sprawność, 2. Niedopuszczalne oscylacje momentu wokół wartości średniej.


22 Nagrzewanie się silnika praca ciągła S1 Temperatury maksymalne uzwojenie jarzmo stojana magnesy obudowa Chłodzenie konwekcyjne naturalne Pole temperatur t=60 min Obliczenia cieplne zakładają osiową symetrię warunków chłodzenia oraz identyczność pola temperatur w każdej podziałce żłobkowej.
23 Obliczenia cieplne silnika model jednowymiarowy Równanie nagrzewania - stygnięcia θ t = θ u 1 e t τc + θ 0 e t τc θ u = P α k S τ c = cm α k S krzywa nagrzewania temperatura ustalona J u krzywa stygnięcia cieplna stała czasowa t c moc cieplna DP temperatura początkowa J 0 współczynnik wymiany ciepła a k powierzchnia chłodzona S ciepło właściwe c masa M czas t J u J 0 J t c krzywa nagrzewania krzywa stygnięcia Wypadkowa pojemność cieplna cm jest sumą pojemności składowych tj. obwodu magnetycznego stojana i wirnika oraz uzwojeń fazowych. t
24 Rodzaje pracy silnika S1 S8 Rodzaj pracy Oznaczenie Przebieg czasowy temperatury Praca ciągła S1 J t J Praca dorywcza t p czas pracy [min] S2 t p t p t Praca przerywana x = t p 100% Σ t = 10 min t p +t s t p czas pracy, t s czas postoju, S3 x% J t p t s t Praca przerywana x = t r + t p 100% t r + t p + t s t r czas rozruchu, c/h - ilość cykli na godz. FI Factor of Inertia (moment bezwładności układu napędowego odniesiony do momentu bezwładności wirnika) S4 x% 60c/h FI1.4 J t r t p t s t
 przy tym samym momencie i prędkości. Oznacza to, że silnik przy pracy S3 może być obciążony mocą równą w przybliżeniu P S3 100 x P(S1) Wynika to z dwóch zależności: 1.")
25 Nagrzewanie się silnika praca przerywana S3 uzwojenie jarzmo stojana magnesy Średnia temperatura ustalona J u (S3x%) przy pracy przerywanej (z postojem) jest proporcjonalna do względnego czasu pracy x% θ u S3x% = x 100 θ u(s1) przy tym samym momencie i prędkości. Oznacza to, że silnik przy pracy S3 może być obciążony mocą równą w przybliżeniu P S3 100 x P(S1) Wynika to z dwóch zależności: 1. Moment jest proporcjonalny do natężenia prądu fazowego, 2. Straty w obwodzie magnetycznym są zwykle kilka razy mniejsze od strat w uzwojeniach.
26 Dopuszczalne temperatury uzwojeń IEC, NEMA,DIN,PN Maksymalna temperatura pracy w najgorętszym punkcie uzwojenia Temperatura otoczenia J 0 + Średni przyrost temperatury DJ śr + DJ śr-max J 0 40 o C DJ śr-max 10 deg Klasa izolacji Dopuszczalna temperatura pracy w najgorętszym punkcie uzwojeń [ o C] E 120 B 130 F 155 H 180 Szacuje się, że trwałe przekroczenie maksymalnej temperatury o każde 10 stopni skraca czas życia uzwojeń o połowę.
27 Dopuszczalne temperatury magnesów VACUUMSCHMELZE GMBH ustalenie punktu pracy J(H) B(H) Własności magnetyczne produktów VACUUMSCHMELZE Gmbh Charakterystyki namagnesowania magnesu VACODYM 745 AP
28 Źródła ciepła w silniku elektrycznym straty w uzwojeniach Gęstość strat mocy w uzwojeniach p Q [W/m 3 ] p Q = J2 γ Cu (1 + α ϑ Δθ) Ekwiwalentna gęstość prądu w uzwojeniach J ek J wartość skuteczna gęstości prądu g Cu konduktywność miedzi a J temperaturowy współczynnik rezystywności (dla Cu a J =0.004 [1/deg]) DJ przyrost temperatury J 2 ek S Z = J 2 S S Cu Z powierzchnia przekroju żłobka S cu sumaryczny przekrój drutów w żłobku Straty mocy w uzwojeniach DP uzw [W] ΔP uzw = p Q V Cu = p Q k V V uzw V uzw objętość cewek uzwojenia V cu objętość miedzi w uzwojeniu k V współczynnik objętościowego wypełnienia; k V =S Cu /S Z =(0.40.5)
![Źródła ciepła w silniku elektrycznym straty w żelazie twornika Gęstość strat mocy w obwodzie magnetycznym p Fe [W/m 3 ] p Fe = Δ p B B ref 2 ρ Fe D p stratność blachy [W/kg] przy indukcji B ref i](/docs-images/60/45227756/images/29-0.png "częstotliwości f ref B aktualna wartość amplitudy indukcji w zębach/jarzmie stojana r Fe gęstość blach stojana Zakładając sinusoidalny rozkład indukcji w przestrzeni na obwodzie maszyny całkowite")
29 Źródła ciepła w silniku elektrycznym straty w żelazie twornika Gęstość strat mocy w obwodzie magnetycznym p Fe [W/m 3 ] p Fe = Δ p B B ref 2 ρ Fe D p stratność blachy [W/kg] przy indukcji B ref i częstotliwości f ref B aktualna wartość amplitudy indukcji w zębach/jarzmie stojana r Fe gęstość blach stojana Zakładając sinusoidalny rozkład indukcji w przestrzeni na obwodzie maszyny całkowite straty w żelazie DP Fe są równe ΔP Fe = 1 2 p Fe,zębyV zęby + p Fe,jarzmo V jarzmo Dla częstotliwości pracy różnej od referencyjnej należy pamiętać, że straty histerezowe są proporcjonalne do częstotliwości a wiroprądowe do jej kwadratu. Typowe wartości obliczeniowych gęstości strat mocy: p Q (J=4 A/mm 2, k V =0.45,J=20 o C) = 130 [kw/m 3 ] p Fe (B=1.75T, f=50hz) = 25 [kw/m 3 ]
30 Mechanizm przenoszenia ciepła przewodzenie Gęstość strumienia ciepła Y [W/m 2 ] Y = diag λ θ [l] macierz przewodności cieplnych, J gradient temperatury, Materiał Przewodność cieplna właściwa [W/(m deg)] miedź 385 aluminium 235 żelazo 85 polimery polimery z wypełnieniem SiO powietrze (20 o C, 1000 hpa) izolacja Zastępcze przewodności cieplne niskonapięciowej cewki l x = l y 3 l izolacji l z = 0.5 l Cu Cu z y x
31 Gęstość strumienia ciepła Y [W/m 2 ] Y n = α kp Δθ DJ przyrost temperatury względem otoczenia, a kp współczynnik wymiany ciepła przez konwekcję i promieniowanie [W/(m 2 deg)] Mechanizm przenoszenia ciepła konwekcja i promieniowanie Konwekcja naturalna cylindryczna powierzchnia ustawiona horyzontalnie α kn = 2.44 Δϑ l v a kn 0.25 [ W/(m 2 deg)] l v długość tworzącej walca [m] Konwekcja wymuszona laminarna cylindryczna powierzchnia ustawiona horyzontalnie α kl = 3.85 a kl v p l v [ W/(m 2 deg)] v p prędkość strugi [m/s] l v długość tworzącej walca [m] l v = 0.1 m 0.2 m 0.3 m 0.4 m J [ o C] l v = 0.1 m 0.2 m 0.3 m 0.4 m v [ m/s] Promieniowanie cylindryczna powierzchnia o temperaturze T [K] w jednorodnym otoczeniu o temperaturze T 0 [K] e p stała Boltzmana α p = ε c ε p T 4 T 0 4 T T 0 a p =(79) W/(m 2 deg) dla e c =1 e p = [W/m 2 K 4 ] e c współczynnik chropowatości e c = (0.10.9)




32 Przykładowe zastosowanie Toyota Prius 2010 P N =25 kw, n N =3000 obr/min, m 1 =3, p=4, Chłodzenie natryskowe, DJ=100 deg dla pracy S2 40min SEM n=4000 obr/min Moment rozruchowy
Projekt silnika bezszczotkowego z magnesami trwałymi
 Projekt silnika bezszczotkowego z magnesami trwałymi dr inż. Michał Michna michna@pg.gda.pl 01-10-16 1. Dane znamionowe moc znamionowa P n : 10kW napięcie znamionowe U n : 400V prędkość znamionowa n n
Projekt silnika bezszczotkowego z magnesami trwałymi dr inż. Michał Michna michna@pg.gda.pl 01-10-16 1. Dane znamionowe moc znamionowa P n : 10kW napięcie znamionowe U n : 400V prędkość znamionowa n n
Projekt silnika bezszczotkowego prądu przemiennego. 1. Wstęp. 1.1 Dane wejściowe. 1.2 Obliczenia pomocnicze
 projekt_pmsm_v.xmcd 01-04-1 Projekt silnika bezszczotkowego prądu przemiennego 1. Wstęp Projekt silnika bezszczotkowego prądu przemiennego - z sinusoidalnym rozkładem indukcji w szczelinie powietrznej.
projekt_pmsm_v.xmcd 01-04-1 Projekt silnika bezszczotkowego prądu przemiennego 1. Wstęp Projekt silnika bezszczotkowego prądu przemiennego - z sinusoidalnym rozkładem indukcji w szczelinie powietrznej.
bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.
, bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe, trzymadła szczotkowe.") Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Silnik prądu stałego - budowa Stojan - najczęściej jest magneśnicą wytwarza pole magnetyczne jarzmo (2), bieguny główne z uzwojeniem wzbudzającym (3), bieguny pomocnicze (komutacyjne) (5), tarcze łożyskowe,
Projekt silnika bezszczotkowego z magnesami trwałymi
 013-1-0 Projekt silnika bezszczotkowego z magnesami trwałymi autor: dr inż. Michał Michna michna@pg.gda.pl data : 01-10-16 opis projektu: projekt silnika bezszczotkowego z magnesami trwałymi, obliczenia
013-1-0 Projekt silnika bezszczotkowego z magnesami trwałymi autor: dr inż. Michał Michna michna@pg.gda.pl data : 01-10-16 opis projektu: projekt silnika bezszczotkowego z magnesami trwałymi, obliczenia
Wykład 2 Silniki indukcyjne asynchroniczne
 Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
Wykład 2 Silniki indukcyjne asynchroniczne Katedra Sterowania i InŜynierii Systemów 1 Budowa silnika inukcyjnego Katedra Sterowania i InŜynierii Systemów 2 Budowa silnika inukcyjnego Tabliczka znamionowa
OBWODY MAGNETYCZNE SPRZĘśONE
 Obwody magnetyczne sprzęŝone... 1/3 OBWODY MAGNETYCZNE SPRZĘśONE Strumień magnetyczny: Φ = d B S (1) S Strumień skojarzony z cewką: Ψ = w Φ () Indukcyjność własna: L Ψ = (3) i Jeśli w przekroju poprzecznym
Obwody magnetyczne sprzęŝone... 1/3 OBWODY MAGNETYCZNE SPRZĘśONE Strumień magnetyczny: Φ = d B S (1) S Strumień skojarzony z cewką: Ψ = w Φ () Indukcyjność własna: L Ψ = (3) i Jeśli w przekroju poprzecznym
2. Struktura programu MotorSolve. Paweł Witczak, Instytut Mechatroniki i Systemów Informatycznych PŁ
 2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
2. Struktura programu MotorSolve Zakres zastosowań Program MotorSolve pozwala na projektowanie 3 rodzajów silników prądu przemiennego: synchronicznych wzbudzanych magnesami trwałymi lub elektromagnetycznie,
Oddziaływanie wirnika
 Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
Oddziaływanie wirnika W każdej maszynie prądu stałego, pracującej jako prądnica lub silnik, może wystąpić taki szczególny stan pracy, że prąd wirnika jest równy zeru. Jedynym przepływem jest wówczas przepływ
INSTRUKCJA LABORATORIUM ELEKTROTECHNIKI BADANIE TRANSFORMATORA. Autor: Grzegorz Lenc, Strona 1/11
 NSTRKCJA LABORATORM ELEKTROTECHNK BADANE TRANSFORMATORA Autor: Grzegorz Lenc, Strona / Badanie transformatora Celem ćwiczenia jest poznanie zasady działania transformatora oraz wyznaczenie parametrów schematu
NSTRKCJA LABORATORM ELEKTROTECHNK BADANE TRANSFORMATORA Autor: Grzegorz Lenc, Strona / Badanie transformatora Celem ćwiczenia jest poznanie zasady działania transformatora oraz wyznaczenie parametrów schematu
Ć wiczenie 2 POMIARY REZYSTANCJI, INDUKCYJNOŚCI I POJEMNOŚCI
 37 Ć wiczenie POMIARY REZYSTANCJI, INDUKCYJNOŚCI I POJEMNOŚCI 1. Wiadomości ogólne 1.1. Rezystancja Zasadniczą rolę w obwodach elektrycznych odgrywają przewodniki metalowe, z których wykonuje się przesyłowe
37 Ć wiczenie POMIARY REZYSTANCJI, INDUKCYJNOŚCI I POJEMNOŚCI 1. Wiadomości ogólne 1.1. Rezystancja Zasadniczą rolę w obwodach elektrycznych odgrywają przewodniki metalowe, z których wykonuje się przesyłowe
Indukcyjność. Autorzy: Zbigniew Kąkol Kamil Kutorasiński
 Indukcyjność Autorzy: Zbigniew Kąkol Kamil Kutorasiński 2019 Indukcyjność Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Powszechnie stosowanym urządzeniem, w którym wykorzystano zjawisko indukcji elektromagnetycznej
Indukcyjność Autorzy: Zbigniew Kąkol Kamil Kutorasiński 2019 Indukcyjność Autorzy: Zbigniew Kąkol, Kamil Kutorasiński Powszechnie stosowanym urządzeniem, w którym wykorzystano zjawisko indukcji elektromagnetycznej
MAGNETYZM. PRĄD PRZEMIENNY
 Włodzimierz Wolczyński 47 POWTÓRKA 9 MAGNETYZM. PRĄD PRZEMIENNY Zadanie 1 W dwóch przewodnikach prostoliniowych nieskończenie długich umieszczonych w próżni, oddalonych od siebie o r = cm, płynie prąd.
Włodzimierz Wolczyński 47 POWTÓRKA 9 MAGNETYZM. PRĄD PRZEMIENNY Zadanie 1 W dwóch przewodnikach prostoliniowych nieskończenie długich umieszczonych w próżni, oddalonych od siebie o r = cm, płynie prąd.
WYKŁAD 9 POLE MAGNETYCZNE W MASZYNACH PRĄDU STAŁEGO
 WYKŁAD 9 POLE MAGNETYCZNE W MAZYNACH PRĄDU TAŁEGO 9.1. Wpływ nasycenia obwodu magnetycznego na własności maszyn prądu stałego. W dotychczasowych rozważaniach przyjmowano, że natężenie pola magnetycznego
WYKŁAD 9 POLE MAGNETYCZNE W MAZYNACH PRĄDU TAŁEGO 9.1. Wpływ nasycenia obwodu magnetycznego na własności maszyn prądu stałego. W dotychczasowych rozważaniach przyjmowano, że natężenie pola magnetycznego
Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników:
 Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
Temat: Analiza pracy i właściwości ruchowych maszyn synchronicznych Sposób analizy zjawisk i właściwości ruchowych maszyn synchronicznych zależą od dwóch czynników: budowy wirnika stanu nasycenia rdzenia
LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH
 -CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
-CEL- LABORATORIUM PRZETWORNIKÓW ELEKTROMECHANICZNYCH PODSTAWOWE CHARAKTERYSTYKI I PARAMETRY SILNIKA RELUKTANCYJNEGO Z KLATKĄ ROZRUCHOWĄ (REL) Zapoznanie się z konstrukcją silników reluktancyjnych. Wyznaczenie
PRĄDNICE I SILNIKI. Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
PRĄDNICE I SILNIKI Publikacja współfinansowana ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego Prądnice i silniki (tzw. maszyny wirujące) W każdej maszynie można wyróżnić: - magneśnicę
RÓWNANIA MAXWELLA. Czy pole magnetyczne może stać się źródłem pola elektrycznego? Czy pole elektryczne może stać się źródłem pola magnetycznego?
 RÓWNANIA MAXWELLA Czy pole magnetyczne może stać się źródłem pola elektrycznego? Czy pole elektryczne może stać się źródłem pola magnetycznego? Wykład 3 lato 2012 1 Doświadczenia Wykład 3 lato 2012 2 1
RÓWNANIA MAXWELLA Czy pole magnetyczne może stać się źródłem pola elektrycznego? Czy pole elektryczne może stać się źródłem pola magnetycznego? Wykład 3 lato 2012 1 Doświadczenia Wykład 3 lato 2012 2 1
Ćwiczenie: "Silnik indukcyjny"
 Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik indukcyjny" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Przykład ułożenia uzwojeń
 Maszyny elektryczne Transformator Przykład ułożenia uzwojeń Transformator idealny - transformator, który spełnia następujące warunki:. Nie występują w nim straty mocy, a mianowicie straty w rdzeniu ( P
Maszyny elektryczne Transformator Przykład ułożenia uzwojeń Transformator idealny - transformator, który spełnia następujące warunki:. Nie występują w nim straty mocy, a mianowicie straty w rdzeniu ( P
Maszyny synchroniczne - budowa
 Maszyny synchroniczne - budowa Maszyny synchroniczne używane są przede wszystkim do zamiany energii ruchu obrotowego na energię elektryczną. Pracują zatem jako generatory. W elektrowniach cieplnych używa
Maszyny synchroniczne - budowa Maszyny synchroniczne używane są przede wszystkim do zamiany energii ruchu obrotowego na energię elektryczną. Pracują zatem jako generatory. W elektrowniach cieplnych używa
WYKŁAD 15 WŁASNOŚCI MAGNETYCZNE MAGNESÓW TRWAŁYCH
 WYKŁAD 15 WŁASNOŚCI AGNETYCZNE AGNESÓW TRWAŁYC Przy wzbudzaniu pola magnetycznego za pomocą magnesów trwałych występuje pewna specyfika, związana z występowaniem w badanym obszarze maszyny zarówno źródła
WYKŁAD 15 WŁASNOŚCI AGNETYCZNE AGNESÓW TRWAŁYC Przy wzbudzaniu pola magnetycznego za pomocą magnesów trwałych występuje pewna specyfika, związana z występowaniem w badanym obszarze maszyny zarówno źródła
Obliczenia polowe silnika przełączalnego reluktancyjnego (SRM) w celu jego optymalizacji
 w celu jego optymalizacji") Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
Akademia Górniczo Hutnicza im. Stanisława Staszica w Krakowie Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Studenckie Koło Naukowe Maszyn Elektrycznych Magnesik Obliczenia polowe silnika
WYKŁAD 4 STAN JAŁOWY I ZWARCIE TRANSFORMATORA
 WYKŁAD 4 STA JAŁOWY ZWARCE TRASFORMATORA 4.. Moc pozorna transformatora jednofazowego. Rozpatrzmy transformator jednofazowy z rdzeniem płaszczowym pokazany na rys.4.. Przekrój kolumny rdzenia wynosi S
WYKŁAD 4 STA JAŁOWY ZWARCE TRASFORMATORA 4.. Moc pozorna transformatora jednofazowego. Rozpatrzmy transformator jednofazowy z rdzeniem płaszczowym pokazany na rys.4.. Przekrój kolumny rdzenia wynosi S
Wykład 4. Strumień magnetyczny w maszynie synchroniczne magnes trwały, elektromagnes. Magneśnica wirnik z biegunami magnetycznymi. pn 60.
 Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Serwonapędy w automatyce i robotyce Wykład 4 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik synchroniczny - wprowadzenie Maszyna synchroniczna maszyna prądu przemiennego, której wirnik w stanie
Temat: SILNIKI SYNCHRONICZNE W UKŁADACH AUTOMATYKI
 Temat: ILIKI YCHROICZE W UKŁADACH AUTOMATYKI Zagadnienia: praca silnikowa prądnicy synchronicznej silnik o magnesach trwałych (permasyn) silnik reluktancyjny silnik histerezowy 1 Co to jest silnik synchroniczny?
Temat: ILIKI YCHROICZE W UKŁADACH AUTOMATYKI Zagadnienia: praca silnikowa prądnicy synchronicznej silnik o magnesach trwałych (permasyn) silnik reluktancyjny silnik histerezowy 1 Co to jest silnik synchroniczny?
Wykład 5. Piotr Sauer Katedra Sterowania i Inżynierii Systemów
 Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
Serwonapędy w automatyce i robotyce Wykład 5 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Prądnica prądu stałego zasada działania e Blv sinαα Prądnica prądu stałego zasada działania Prądnica prądu
Silniki prądu stałego z komutacją bezstykową (elektroniczną)
") Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Silniki prądu stałego z komutacją bezstykową (elektroniczną) Silnik bezkomutatorowy z fototranzystorami Schemat układu przekształtnikowego zasilającego trójpasmowy silnik bezszczotkowy Pojedynczy cykl
Indukcja elektromagnetyczna. Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
 Indukcja elektromagnetyczna Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Strumień indukcji magnetycznej Analogicznie do strumienia pola elektrycznego można
Indukcja elektromagnetyczna Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Strumień indukcji magnetycznej Analogicznie do strumienia pola elektrycznego można
PL B1. INSTYTUT NAPĘDÓW I MASZYN ELEKTRYCZNYCH KOMEL, Katowice, PL BUP 15/16
 PL 226638 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226638 (13) B1 (21) Numer zgłoszenia: 414515 (51) Int.Cl. H02K 21/24 (2006.01) H02K 15/08 (2006.01) Urząd Patentowy Rzeczypospolitej
PL 226638 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 226638 (13) B1 (21) Numer zgłoszenia: 414515 (51) Int.Cl. H02K 21/24 (2006.01) H02K 15/08 (2006.01) Urząd Patentowy Rzeczypospolitej
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO
 Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: ŹRÓDŁA ENERGII ELEKTRYCZNEJ PRĄDU PRZEMIENNEGO 1 Źródła energii elektrycznej prądu przemiennego: 1. prądnice synchroniczne 2. prądnice asynchroniczne Surowce energetyczne: węgiel kamienny i brunatny
Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia.
 Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia. Transformator może się znajdować w jednym z trzech charakterystycznych stanów pracy: a) stanie jałowym b) stanie obciążenia c) stanie
Temat: Analiza pracy transformatora: stan jałowy, obciążenia i zwarcia. Transformator może się znajdować w jednym z trzech charakterystycznych stanów pracy: a) stanie jałowym b) stanie obciążenia c) stanie
OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI
 W CELU JEGO OPTYMALIZACJI") Michał Majchrowicz *, Wiesław Jażdżyński ** OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI 1. WSTĘP Silniki reluktancyjne przełączalne ze względu na swoje liczne
Michał Majchrowicz *, Wiesław Jażdżyński ** OBLICZENIA POLOWE SILNIKA PRZEŁĄCZALNEGO RELUKTANCYJNEGO (SRM) W CELU JEGO OPTYMALIZACJI 1. WSTĘP Silniki reluktancyjne przełączalne ze względu na swoje liczne
H a. H b MAGNESOWANIE RDZENIA FERROMAGNETYCZNEGO
 MAGNESOWANIE RDZENIA FERROMAGNETYCZNEGO Jako przykład wykorzystania prawa przepływu rozważmy ferromagnetyczny rdzeń toroidalny o polu przekroju S oraz wymiarach geometrycznych podanych na Rys. 1. Załóżmy,
MAGNESOWANIE RDZENIA FERROMAGNETYCZNEGO Jako przykład wykorzystania prawa przepływu rozważmy ferromagnetyczny rdzeń toroidalny o polu przekroju S oraz wymiarach geometrycznych podanych na Rys. 1. Załóżmy,
PL B1. INSTYTUT NAPĘDÓW I MASZYN ELEKTRYCZNYCH KOMEL, Katowice, PL BUP 17/18
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 231390 (13) B1 (21) Numer zgłoszenia: 423953 (51) Int.Cl. H02K 16/04 (2006.01) H02K 21/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 231390 (13) B1 (21) Numer zgłoszenia: 423953 (51) Int.Cl. H02K 16/04 (2006.01) H02K 21/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
ANALIZA PORÓWNAWCZA SILNIKÓW LSPMSM TYPU U ORAZ W.
 XLIII SESJA STUDENCKICH KÓŁ NAUKOWYCH ANALIZA PORÓWNAWCZA SILNIKÓW LSPMSM TYPU U ORAZ W. Wykonał student V roku Elektrotechniki na AGH, członek koła naukowego Magnesik : Marcin Bajek Opiekun naukowy referatu:
XLIII SESJA STUDENCKICH KÓŁ NAUKOWYCH ANALIZA PORÓWNAWCZA SILNIKÓW LSPMSM TYPU U ORAZ W. Wykonał student V roku Elektrotechniki na AGH, członek koła naukowego Magnesik : Marcin Bajek Opiekun naukowy referatu:
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny.
 Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Temat: Silniki komutatorowe jednofazowe: silnik szeregowy, bocznikowy, repulsyjny. 1. Silnik komutatorowy jednofazowy szeregowy (silniki uniwersalne). silniki komutatorowe jednofazowe szeregowe maja budowę
Indukcja wzajemna. Transformator. dr inż. Romuald Kędzierski
 Indukcja wzajemna Transformator dr inż. Romuald Kędzierski Do czego służy transformator? Jest to urządzenie (zwane też maszyną elektryczną), które wykorzystując zjawisko indukcji elektromagnetycznej pozwala
Indukcja wzajemna Transformator dr inż. Romuald Kędzierski Do czego służy transformator? Jest to urządzenie (zwane też maszyną elektryczną), które wykorzystując zjawisko indukcji elektromagnetycznej pozwala
Silnik indukcyjny - historia
 Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
Silnik indukcyjny - historia Galileo Ferraris (1847-1897) - w roku 1885 przedstawił konstrukcję silnika indukcyjnego. Nicola Tesla (1856-1943) - podobną konstrukcję silnika przedstawił w roku 1886. Oba
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 2016/2017. Zadania z elektrotechniki na zawody I stopnia
 EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 2016/2017 Zadania z elektrotechniki na zawody I stopnia Instrukcja dla zdającego 1. Czas trwania zawodów: 120 minut.
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 2016/2017 Zadania z elektrotechniki na zawody I stopnia Instrukcja dla zdającego 1. Czas trwania zawodów: 120 minut.
WYKŁAD 2 INDUKOWANIE SIŁY ELEKTROMOTORYCZNEJ
 WYKŁAD DUKOWA SŁY KTOMOTOYCZJ.. Źródłowy i odbiornikowy system oznaczeń. ozpatrzmy elementarny obwód elektryczny prądu stałego na przykładzie ładowania akumulatora samochodowego przedstawiony na rys...
WYKŁAD DUKOWA SŁY KTOMOTOYCZJ.. Źródłowy i odbiornikowy system oznaczeń. ozpatrzmy elementarny obwód elektryczny prądu stałego na przykładzie ładowania akumulatora samochodowego przedstawiony na rys...
Prąd d zmienny. prąd zmienny -(ang.:alternating current, AC) prąd elektryczny, którego natężenie zmienia się w czasie.
 prąd elektryczny, którego natężenie zmienia się w czasie.") Prąd d zmienny prąd zmienny -(ang.:alternating current, AC) prąd elektryczny, którego natężenie zmienia się w czasie. 1 Oś wartości natężenia prądu Oś czasu 2 Definicja natężenia prądu zmiennego i dq =
Prąd d zmienny prąd zmienny -(ang.:alternating current, AC) prąd elektryczny, którego natężenie zmienia się w czasie. 1 Oś wartości natężenia prądu Oś czasu 2 Definicja natężenia prądu zmiennego i dq =
Silniki prądu przemiennego
 Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
Silniki prądu przemiennego Podział maszyn prądu przemiennego Asynchroniczne indukcyjne komutatorowe jedno- i wielofazowe synchroniczne ze wzbudzeniem reluktancyjne histerezowe Silniki indukcyjne uzwojenie
X X. Rysunek 1. Rozwiązanie zadania 1 Dane są: impedancje zespolone cewek. a, gdzie a = e 3
 EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 20/202 Odpowiedzi do zadań dla grupy elektrycznej na zawody II stopnia Zadanie Na rysunku przedstawiono schemat obwodu
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 20/202 Odpowiedzi do zadań dla grupy elektrycznej na zawody II stopnia Zadanie Na rysunku przedstawiono schemat obwodu
PL 192086 B1 H02K 19/06 H02K 1/22. Akademia Górniczo-Hutnicza im. St. Staszica,Kraków,PL 22.05.2000 BUP 11/00
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11) 192086 (13) B1 (21) Numer zgłoszenia: 329652 (51) Int.Cl. 8 H02K 19/06 H02K 1/22 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 09.11.1998
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19)PL (11) 192086 (13) B1 (21) Numer zgłoszenia: 329652 (51) Int.Cl. 8 H02K 19/06 H02K 1/22 Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia: 09.11.1998
WYKŁAD 8 BUDOWA I ZASADA DZIAŁANIA MASZYN PRĄDU STAŁEGO
 WYKŁAD 8 BUDOWA I ZASADA DZIAŁANIA MASZYN PRĄDU STAŁEGO 8.1. Podstawowe enty konstrukcyjne W każdej maszynie ektrycznej wyróżnia się w sposób naturalny część ruchomą względem otoczenia wirnik oraz nieruchomą
WYKŁAD 8 BUDOWA I ZASADA DZIAŁANIA MASZYN PRĄDU STAŁEGO 8.1. Podstawowe enty konstrukcyjne W każdej maszynie ektrycznej wyróżnia się w sposób naturalny część ruchomą względem otoczenia wirnik oraz nieruchomą
Maszyny Synchroniczne
 nstytut Mechatroniki i Systemów nformatycznych Maszyny Synchroniczne Zadanie Dla turbogeneratora o następujących danych znamionowych: moc znamionowa P 00 MW, napięcie znamionowe U 15, 75 kv (Y), częstotliwość
nstytut Mechatroniki i Systemów nformatycznych Maszyny Synchroniczne Zadanie Dla turbogeneratora o następujących danych znamionowych: moc znamionowa P 00 MW, napięcie znamionowe U 15, 75 kv (Y), częstotliwość
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY 1. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
Maszyny Elektryczne i Transformatory st. n. st. sem. III (zima) 2018/2019
 2018/2019") Kolokwium poprawkowe Wariant A Maszyny Elektryczne i Transormatory st. n. st. sem. III (zima) 018/019 Transormator Transormator trójazowy ma następujące dane znamionowe: S 00 kva 50 Hz HV / LV 15,75 ±x,5%
Kolokwium poprawkowe Wariant A Maszyny Elektryczne i Transormatory st. n. st. sem. III (zima) 018/019 Transormator Transormator trójazowy ma następujące dane znamionowe: S 00 kva 50 Hz HV / LV 15,75 ±x,5%
POLE MAGNETYCZNE Własności pola magnetycznego. Źródła pola magnetycznego
 POLE MAGNETYCZNE Własności pola magnetycznego. Źródła pola magnetycznego Pole magnetyczne magnesu trwałego Pole magnetyczne Ziemi Jeśli przez przewód płynie prąd to wokół przewodu jest pole magnetyczne.
POLE MAGNETYCZNE Własności pola magnetycznego. Źródła pola magnetycznego Pole magnetyczne magnesu trwałego Pole magnetyczne Ziemi Jeśli przez przewód płynie prąd to wokół przewodu jest pole magnetyczne.
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej.
 Szkoły Policealnej Zawodowej.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W10) Szkoły Policealnej Zawodowej. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w energię
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5
 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO Strona 1/5 BADANIE JEDNOFAZOWEGO SILNIKA ASYNCHRONICZNEGO 1. Wiadomości wstępne Silniki asynchroniczne jednofazowe są szeroko stosowane wszędzie tam, gdzie
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Przetworniki Elektromaszynowe st. n.st. sem. V (zima) 2016/2017
 2016/2017") Kolokwium poprawkowe Wariant A Przetworniki Elektromaszynowe st. n.st. sem. V (zima 016/017 Transormatory Transormator trójazowy ma następujące dane znamionowe: 60 kva 50 Hz HV / LV 15 750 ± x,5% / 400
Kolokwium poprawkowe Wariant A Przetworniki Elektromaszynowe st. n.st. sem. V (zima 016/017 Transormatory Transormator trójazowy ma następujące dane znamionowe: 60 kva 50 Hz HV / LV 15 750 ± x,5% / 400
Sterowanie Napędów Maszyn i Robotów
 Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Wykład 4 - Model silnika elektrycznego prądu stałego z magnesem trwałym Instytut Automatyki i Robotyki Warszawa, 2017 Wstęp Silniki elektryczne prądu stałego są bardzo często stosowanymi elementami wykonawczymi
Maszyny elektryczne. Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego.
 Kwalifikacyjnego kursu zawodowego.") Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Maszyny elektryczne Materiały dydaktyczne dla kierunku Technik Optyk (W12) Kwalifikacyjnego kursu zawodowego. Podział maszyn elektrycznych Transformatory - energia prądu przemiennego jest zamieniana w
Pracownia Automatyki i Elektrotechniki Katedry Tworzyw Drzewnych Ćwiczenie 5. Analiza pracy oraz zasada działania silników asynchronicznych
 ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
ĆWCZENE 5 Analiza pracy oraz zasada działania silników asynchronicznych 1. CEL ĆWCZENA Celem ćwiczenia jest zapoznanie się z podstawowymi układami elektrycznego sterowania silnikiem trójfazowym asynchronicznym
Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych
 Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych Zakres ćwiczenia 1) Pomiar napięć indukowanych. 2) Pomiar ustalonej temperatury czół zezwojów. 3) Badania obciążeniowe. Badania należy
Wyznaczanie strat w uzwojeniu bezrdzeniowych maszyn elektrycznych Zakres ćwiczenia 1) Pomiar napięć indukowanych. 2) Pomiar ustalonej temperatury czół zezwojów. 3) Badania obciążeniowe. Badania należy
WYKŁAD 16 STRUKTURY MASZYN Z MAGNESAMI TRWAŁYMI
 WYKŁAD 16 STRUKTURY MASZYN Z MAGNESAMI TRWAŁYMI 16.1. Topologia budowy przetworników elektromechanicznych. Wymiana energii w przetworniku z magnesami trwałymi zachodzi poprzez interakcję pól magnetycznych
WYKŁAD 16 STRUKTURY MASZYN Z MAGNESAMI TRWAŁYMI 16.1. Topologia budowy przetworników elektromechanicznych. Wymiana energii w przetworniku z magnesami trwałymi zachodzi poprzez interakcję pól magnetycznych
Konstrukcje Maszyn Elektrycznych
 Konstrukcje Maszyn Elektrycznych Konspekt wykładu: dr inż. Krzysztof Bieńkowski GpK p.16 tel. 761 K.Bienkowski@ime.pw.edu.pl www.ime.pw.edu.pl/zme/ 1. Zakres wykładu, literatura. 2. Parametry konstrukcyjne
Konstrukcje Maszyn Elektrycznych Konspekt wykładu: dr inż. Krzysztof Bieńkowski GpK p.16 tel. 761 K.Bienkowski@ime.pw.edu.pl www.ime.pw.edu.pl/zme/ 1. Zakres wykładu, literatura. 2. Parametry konstrukcyjne
Ćwiczenie 4 WYZNACZANIE INDUKCYJNOŚCI WŁASNEJ I WZAJEMNEJ
 Ćwiczenie 4 WYZNCZNE NDUKCYJNOŚC WŁSNEJ WZJEMNEJ Celem ćwiczenia jest poznanie pośrednich metod wyznaczania indukcyjności własnej i wzajemnej na podstawie pomiarów parametrów elektrycznych obwodu. 4..
Ćwiczenie 4 WYZNCZNE NDUKCYJNOŚC WŁSNEJ WZJEMNEJ Celem ćwiczenia jest poznanie pośrednich metod wyznaczania indukcyjności własnej i wzajemnej na podstawie pomiarów parametrów elektrycznych obwodu. 4..
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
TEST DLA GRUPY ELEKTRYCZNEJ
 XXXIX Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej K R A K Ó W, R A D O M 12.02.2016, 22-23.04.2016 WYJAŚNIENIE: TEST DLA GRUPY ELEKTRYCZNEJ Przed przystąpieniem do udzielenia odpowiedzi
XXXIX Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej K R A K Ó W, R A D O M 12.02.2016, 22-23.04.2016 WYJAŚNIENIE: TEST DLA GRUPY ELEKTRYCZNEJ Przed przystąpieniem do udzielenia odpowiedzi
Elektromagnesy prądu stałego cz. 2
 Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Jakub Wierciak Elektromagnesy cz. 2 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Siła przyciągania elektromagnesu - uproszczenie
Badanie transformatora
 Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
Ćwiczenie 14 Badanie transformatora 14.1. Zasada ćwiczenia Transformator składa się z dwóch uzwojeń, umieszczonych na wspólnym metalowym rdzeniu. Do jednego uzwojenia (pierwotnego) przykłada się zmienne
Silniki synchroniczne
 Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Silniki synchroniczne Silniki synchroniczne są maszynami synchronicznymi i są wykonywane jako maszyny z biegunami jawnymi, czyli występują w nich tylko moment synchroniczny, a także moment reluktancyjny.
Lekcja 59. Histereza magnetyczna
 Lekcja 59. Histereza magnetyczna Histereza - opóźnienie w reakcji na czynnik zewnętrzny. Zjawisko odkrył i nazwał James Alfred Ewing w roku 1890. Najbardziej znane przypadki histerezy występują w materiałach
Lekcja 59. Histereza magnetyczna Histereza - opóźnienie w reakcji na czynnik zewnętrzny. Zjawisko odkrył i nazwał James Alfred Ewing w roku 1890. Najbardziej znane przypadki histerezy występują w materiałach
Silniki indukcyjne. Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe.
 Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Silniki indukcyjne Ze względu na budowę wirnika maszyny indukcyjne dzieli się na: -Maszyny indukcyjne pierścieniowe. -Maszyny indukcyjne klatkowe. Silniki pierścieniowe to takie silniki indukcyjne, w których
Badanie trójfazowego silnika indukcyjnego pierścieniowego
 Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N4 - instrukcja Badanie trójfazowego silnika indukcyjnego pierścieniowego Warszawa 03r.
Zakład Napędów Wieloźródłowych Instytut Maszyn Roboczych Ciężkich PW Laboratorium Napędów Elektrycznych Ćwiczenie N4 - instrukcja Badanie trójfazowego silnika indukcyjnego pierścieniowego Warszawa 03r.
Prądy wirowe (ang. eddy currents)
") Prądy wirowe (ang. eddy currents) Prądy można indukować elektromagnetycznie nie tylko w przewodnikach liniowych, ale również w materiałach przewodzących o dowolnym kształcie i powierzchni, jeżeli tylko
Prądy wirowe (ang. eddy currents) Prądy można indukować elektromagnetycznie nie tylko w przewodnikach liniowych, ale również w materiałach przewodzących o dowolnym kształcie i powierzchni, jeżeli tylko
WYKORZYSTANIE OPROGRAMOWANIA MAXWELL DO OPTYMALIZACJI KONSTRUKCJI OBWODU ELEKTROMAGNETYCZNEGO SILNIKÓW TARCZOWYCH
 WYKORZYSTANIE OPROGRAMOWANIA MAXWELL DO OPTYMALIZACJI KONSTRUKCJI OBWODU ELEKTROMAGNETYCZNEGO SILNIKÓW TARCZOWYCH Tomasz WOLNIK* * Instytut Napędów i Maszyn Elektrycznych KOMEL Streszczenie. W artykule
WYKORZYSTANIE OPROGRAMOWANIA MAXWELL DO OPTYMALIZACJI KONSTRUKCJI OBWODU ELEKTROMAGNETYCZNEGO SILNIKÓW TARCZOWYCH Tomasz WOLNIK* * Instytut Napędów i Maszyn Elektrycznych KOMEL Streszczenie. W artykule
BADANIE ELEKTRYCZNEGO OBWODU REZONANSOWEGO RLC
 Ćwiczenie 45 BADANE EEKTYZNEGO OBWOD EZONANSOWEGO 45.. Wiadomości ogólne Szeregowy obwód rezonansowy składa się z oporu, indukcyjności i pojemności połączonych szeregowo i dołączonych do źródła napięcia
Ćwiczenie 45 BADANE EEKTYZNEGO OBWOD EZONANSOWEGO 45.. Wiadomości ogólne Szeregowy obwód rezonansowy składa się z oporu, indukcyjności i pojemności połączonych szeregowo i dołączonych do źródła napięcia
Ćwiczenie 1 Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych
 Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Napędy elektromechaniczne urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego do napędu bezpośredniego przy pracy w warunkach ustalonych Przykłady napędów bezpośrednich - twardy
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego
 Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Rozwój sterowania prędkością silnika indukcyjnego trójfazowego 50Hz Maszyna robocza Rotor 1. Prawie stała prędkość automatyka Załącz- Wyłącz metod a prymitywna w pierwszym etapie -mechanizacja AC silnik
Badanie prądnicy prądu stałego
 POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
POLTECHNKA ŚLĄSKA WYDZAŁ NŻYNER ŚRODOWSKA ENERGETYK NSTYTUT MASZYN URZĄDZEŃ ENERGETYCZNYCH LABORATORUM ELEKTRYCZNE Badanie prądnicy prądu stałego (E 18) Opracował: Dr inż. Włodzimierz OGULEWCZ 3 1. Cel
Silniki prądu stałego. Wiadomości ogólne
 Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Silniki prądu stałego. Wiadomości ogólne Silniki prądu stałego charakteryzują się dobrymi właściwościami ruchowymi przy czym szczególnie korzystne są: duży zakres regulacji prędkości obrotowej i duży moment
Podstawy fizyki sezon 2 7. Układy elektryczne RLC
 Podstawy fizyki sezon 2 7. Układy elektryczne RLC Agnieszka Obłąkowska-Mucha AGH, WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Układ RC
Podstawy fizyki sezon 2 7. Układy elektryczne RLC Agnieszka Obłąkowska-Mucha AGH, WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha Układ RC
7 Dodatek II Ogólna teoria prądu przemiennego
 7 Dodatek II Ogólna teoria prądu przemiennego AC (ang. Alternating Current) oznacza naprzemienne zmiany natężenia prądu i jest symbolizowane przez znak ~. Te zmiany dotyczą zarówno amplitudy jak i kierunku
7 Dodatek II Ogólna teoria prądu przemiennego AC (ang. Alternating Current) oznacza naprzemienne zmiany natężenia prądu i jest symbolizowane przez znak ~. Te zmiany dotyczą zarówno amplitudy jak i kierunku
EUROELEKTRA Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 2014/2015
 EROELEKTR Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 014/015 Zadania z elektrotechniki na zawody II stopnia (grupa elektryczna) Zadanie 1 W układzie jak na rysunku 1 dane są:,
EROELEKTR Ogólnopolska Olimpiada Wiedzy Elektrycznej i Elektronicznej Rok szkolny 014/015 Zadania z elektrotechniki na zawody II stopnia (grupa elektryczna) Zadanie 1 W układzie jak na rysunku 1 dane są:,
Zwój nad przewodzącą płytą
 Zwój nad przewodzącą płytą Z potencjału A można też wyznaczyć napięcie u0 jakie będzie się indukować w pojedynczym zwoju cewki odbiorczej: gdzie: Φ strumień magnetyczny przenikający powierzchnię, której
Zwój nad przewodzącą płytą Z potencjału A można też wyznaczyć napięcie u0 jakie będzie się indukować w pojedynczym zwoju cewki odbiorczej: gdzie: Φ strumień magnetyczny przenikający powierzchnię, której
Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne
 Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Opracowała: mgr inż. Katarzyna Łabno Rozkład materiału z przedmiotu: Urządzenia elektryczne i elektroniczne Dla klasy 2 technik mechatronik Klasa 2 38 tyg. x 4 godz. = 152 godz. Szczegółowy rozkład materiału:
Wykład 14: Indukcja cz.2.
 Wykład 14: Indukcja cz.. Dr inż. Zbigniew Szklarski Katedra Elektroniki, paw. -1, pok.31 szkla@agh.edu.pl http://layer.uci.agh.edu.pl/z.szklarski/ 10.05.017 Wydział Informatyki, Elektroniki i 1 Przykład
Wykład 14: Indukcja cz.. Dr inż. Zbigniew Szklarski Katedra Elektroniki, paw. -1, pok.31 szkla@agh.edu.pl http://layer.uci.agh.edu.pl/z.szklarski/ 10.05.017 Wydział Informatyki, Elektroniki i 1 Przykład
Badania symulacyjne silników elektrycznych z magnesami trwałymi do trolejbusów
 IX Konferencja Naukowo-Techniczna i-mitel 2016 Piotr SZYMCZAK 1 Victor GREBENIKOV 2, Maksim PRYJMAK 2 Zachodniopomorski Uniwersytet Technologiczny w Szczecinie, Wydział Elektryczny (1) Instytut Elektrodynamiki
IX Konferencja Naukowo-Techniczna i-mitel 2016 Piotr SZYMCZAK 1 Victor GREBENIKOV 2, Maksim PRYJMAK 2 Zachodniopomorski Uniwersytet Technologiczny w Szczecinie, Wydział Elektryczny (1) Instytut Elektrodynamiki
Zasady doboru mikrosilników prądu stałego
 Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
Jakub Wierciak Zasady doboru Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Typowy profil prędkości w układzie napędowym (Wierciak
LABORATORIUM PODSTAWY ELEKTROTECHNIKI
 LABORATORIUM PODSTAWY ELEKTROTECHNIKI CHARAKTERYSTYKI TRANSFORMATORA JEDNOFAZOWEGO Badanie właściwości transformatora jednofazowego. Celem ćwiczenia jest poznanie budowy oraz wyznaczenie charakterystyk
LABORATORIUM PODSTAWY ELEKTROTECHNIKI CHARAKTERYSTYKI TRANSFORMATORA JEDNOFAZOWEGO Badanie właściwości transformatora jednofazowego. Celem ćwiczenia jest poznanie budowy oraz wyznaczenie charakterystyk
Napędy urządzeń mechatronicznych - projektowanie. Ćwiczenie 1 Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych
 Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
Napędy urządzeń mechatronicznych - projektowanie Dobór mikrosilnika prądu stałego z przekładnią do pracy w warunkach ustalonych Miniaturowy siłownik liniowy (Oleksiuk, Nitu 1999) Śrubowy mechanizm zamiany
W stojanie (zwanym twornikiem) jest umieszczone uzwojenie prądu przemiennego jednofazowego lub znacznie częściej trójfazowe (rys. 7.2).
 jest umieszczone uzwojenie prądu przemiennego jednofazowego lub znacznie częściej trójfazowe (rys. 7.2).") Temat: Rodzaje maszyn synchronicznych. 1. Co to jest maszyna synchroniczna. Maszyną synchroniczną nazywamy się maszyną prądu przemiennego, której wirnik w stanie ustalonym obraca się z taką samą prędkością,
Temat: Rodzaje maszyn synchronicznych. 1. Co to jest maszyna synchroniczna. Maszyną synchroniczną nazywamy się maszyną prądu przemiennego, której wirnik w stanie ustalonym obraca się z taką samą prędkością,
- kompensator synchroniczny, to właściwie silnik synchroniczny biegnący jałowo (rys.7.41) i odpowiednio wzbudzony;
 i odpowiednio wzbudzony;") Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
Temat: Maszyny synchroniczne specjalne (kompensator synchroniczny, prądnica tachometryczna synchroniczna, silniki reluktancyjne, histerezowe, z magnesami trwałymi. 1. Kompensator synchroniczny. - kompensator
ELEKTROTECHNIKA I ELEKTRONIKA
 UNIWERSYTET TECHNOLOGICZNO-PRZYRODNICZY W BYDGOSZCZY WYDZIAŁ INŻYNIERII MECHANICZNEJ INSTYTUT EKSPLOATACJI MASZYN I TRANSPORTU ZAKŁAD STEROWANIA ELEKTROTECHNIKA I ELEKTRONIKA ĆWICZENIE: E19 BADANIE PRĄDNICY
UNIWERSYTET TECHNOLOGICZNO-PRZYRODNICZY W BYDGOSZCZY WYDZIAŁ INŻYNIERII MECHANICZNEJ INSTYTUT EKSPLOATACJI MASZYN I TRANSPORTU ZAKŁAD STEROWANIA ELEKTROTECHNIKA I ELEKTRONIKA ĆWICZENIE: E19 BADANIE PRĄDNICY
SILNIK INDUKCYJNY KLATKOWY
 SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
SILNIK INDUKCYJNY KLATKOWY. Budowa i zasada działania silników indukcyjnych Zasadniczymi częściami składowymi silnika indukcyjnego są nieruchomy stojan i obracający się wirnik. Wewnętrzną stronę stojana
ELEKTROMAGNETYCZNE PRZETWORNIKI ENERGII DRGAŃ AMORTYZATORA MAGNETOREOLOGICZNEGO
 MODELOWANIE INŻYNIERSKIE ISSN 896-77X 4, s. 9-6, Gliwice ELEKTROMAGNETYCZNE PRZETWORNIKI ENERGII DRGAŃ AMORTYZATORA MAGNETOREOLOGICZNEGO BOGDAN SAPIŃSKI Katedra Automatyzacji Procesów, Akademia Górniczo-Hutnicza
MODELOWANIE INŻYNIERSKIE ISSN 896-77X 4, s. 9-6, Gliwice ELEKTROMAGNETYCZNE PRZETWORNIKI ENERGII DRGAŃ AMORTYZATORA MAGNETOREOLOGICZNEGO BOGDAN SAPIŃSKI Katedra Automatyzacji Procesów, Akademia Górniczo-Hutnicza
Dynamika układów elektrycznych. dr hab. inż. Krzysztof Patan
 Dynamika układów elektrycznych dr hab. inż. Krzysztof Patan Wprowadzenie Modele elektryczne opisują zjawiska zachodzące podczas przemieszczania się ładunków elektrycznych pomiędzy punktami obwodu o różnych
Dynamika układów elektrycznych dr hab. inż. Krzysztof Patan Wprowadzenie Modele elektryczne opisują zjawiska zachodzące podczas przemieszczania się ładunków elektrycznych pomiędzy punktami obwodu o różnych
Ćwiczenie nr 7. Badanie wybranych elementów i układów z rdzeniami ferromagnetycznymi
 Ćwiczenie nr 7 Badanie wybranych elementów i układów z rdzeniami ferromagnetycznymi. Cel ćwiczenia Celem ćwiczenia jest badanie dławika jako elementu nieliniowego, wyznaczenie jego parametrów zastępczych
Ćwiczenie nr 7 Badanie wybranych elementów i układów z rdzeniami ferromagnetycznymi. Cel ćwiczenia Celem ćwiczenia jest badanie dławika jako elementu nieliniowego, wyznaczenie jego parametrów zastępczych
Ćwiczenie: "Silnik prądu stałego"
 Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Ćwiczenie: "Silnik prądu stałego" Opracowane w ramach projektu: "Wirtualne Laboratoria Fizyczne nowoczesną metodą nauczania realizowanego przez Warszawską Wyższą Szkołę Informatyki. Zakres ćwiczenia: Zasada
Wykład 2. Tabliczka znamionowa zawiera: Moc znamionową P N, Napięcie znamionowe uzwojenia stojana U 1N, oraz układ
 Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Serwonapędy w automatyce i robotyce Wykład 2 Piotr Sauer Katedra Sterowania i Inżynierii Systemów Silnik indukcyjny 3-fazowy tabliczka znam. Tabliczka znamionowa zawiera: Moc znamionową P, apięcie znamionowe
Silniki prądu stałego
 Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Silniki prądu stałego Maszyny prądu stałego Silniki zamiana energii elektrycznej na mechaniczną Prądnice zamiana energii mechanicznej na elektryczną Często dane urządzenie może pracować zamiennie. Zenobie
Mikrosilniki prądu stałego cz. 1
 Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania siłowników elektrycznych (Heimann,
Jakub Wierciak Mikrosilniki cz. 1 Człowiek- najlepsza inwestycja Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego Zasady działania siłowników elektrycznych (Heimann,
Rys. 1. Krzywe mocy i momentu: a) w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym
 w obcowzbudnym silniku prądu stałego, b) w odwzbudzanym silniku synchronicznym z magnesem trwałym") Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
Tytuł projektu : Nowatorskie rozwiązanie napędu pojazdu elektrycznego z dwustrefowym silnikiem BLDC Umowa Nr NR01 0059 10 /2011 Czas realizacji : 2011-2013 Idea napędu z silnikami BLDC z przełączalną liczbą
SILNIK BEZSZCZOTKOWY O WIRNIKU KUBKOWYM
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Marek CIURYS*, Ignacy DUDZIKOWSKI* maszyny elektryczne, magnesy trwałe,
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 69 Politechniki Wrocławskiej Nr 69 Studia i Materiały Nr 33 2013 Marek CIURYS*, Ignacy DUDZIKOWSKI* maszyny elektryczne, magnesy trwałe,
POLOWO - OBWODOWY MODEL BEZSZCZOTKOWEJ WZBUDNICY GENERATORA SYNCHRONICZNEGO
 Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 maszyny synchroniczne,wzbudnice, modelowanie polowo-obwodowe Piotr KISIELEWSKI
Prace Naukowe Instytutu Maszyn, Napędów i Pomiarów Elektrycznych Nr 60 Politechniki Wrocławskiej Nr 60 Studia i Materiały Nr 27 2007 maszyny synchroniczne,wzbudnice, modelowanie polowo-obwodowe Piotr KISIELEWSKI
str. 1 Temat: Uzwojenia maszyn prądu stałego. 1. Uzwojenia maszyn prądu stałego. W jednej maszynie prądu stałego możemy spotkać trzy rodzaje uzwojeń:
 Temat: Uzwojenia maszyn prądu stałego. 1. Uzwojenia maszyn prądu stałego. W jednej maszynie prądu stałego możemy spotkać trzy rodzaje uzwojeń: a) uzwojenie biegunów głównych jest uzwojeniem wzbudzającym
Temat: Uzwojenia maszyn prądu stałego. 1. Uzwojenia maszyn prądu stałego. W jednej maszynie prądu stałego możemy spotkać trzy rodzaje uzwojeń: a) uzwojenie biegunów głównych jest uzwojeniem wzbudzającym