Podstawy systemów mikroprocesorowych
|
|
|
- Michalina Lewandowska
- 6 lat temu
- Przeglądów:
Transkrypt
1 Podstawy systemów mikroprocesorowych Wykład nr 6 Wszystko, co jeszcze chcielibyście wiedzieć o mikrokontrolerach, ale wolicie nie pytać (bo jeszcze będzie na kolokwium?) dr Piotr Fronczak fronczak@if.pw.edu.pl Pokój 6GF
2 rozdzielczość 10 bitów 8 kanałów wejściowych (8 źródeł sygnałów) próbkowanie sekwencyjne (jeden kanał na raz) dla standardowego napięcia odniesienia Vref = 5V - kwant pomiaru: 5(V)/1024 = 4.88mV. - dokładność ± 2 LSB = ± 9.76mV Inne moŝliwe źródła napięć odniesienia -źródło wewnętrzne 2,56V - napięcie podane na nóŝkę AREF Tryby pomiarów - ciągły pomiar + generowanie przerwania ADC - na Ŝądanie Przetwornik ADC

 Jeśli zadowala nas rozdzielczość 8-bitowa, to wystarczy")
3 Przetwornik ADC Wynik konwersji zapisany jest w dwóch rejestrach ADCH i ADCL Wyrównanie wyniku konwersji do prawej (bit ADLAR = 0) Wyrównanie wyniku konwersji do lewej (bit ADLAR = 1) Jeśli zadowala nas rozdzielczość 8-bitowa, to wystarczy odczytać ADCH.
4 Przetwornik ADC - konfiguracja Krok 1: Konfiguracja rejestrów ADMUX i ADCSRA. Który kanał ADC? Wyrównać wynik konwersji w rejestrach do prawej, czy lewej? Które napięcie odniesienia? Włączyć samowyzwalanie pomiaru? Włączyć przerwanie? Jaki preskaler?
5 Przetwornik ADC Krok 2: Uruchomienie konwersji ADC Wpisz 1 do flagi ADSC rejestru ADCSRA. Krok 3: Odczytanie wyniku Czekaj, aŝ flaga ADSC wyzeruje się. Odczytaj wynik z rejestrów ADCL i ADCH. #include<avr/io.h> int main (void){ unsigned char result; ADMUX = 0b ; // REFS1:0 = 01 -> AVCC as reference, // ADLAR = 1 -> wyrównanie do lewej // MUX4:0 = > kanał ADC0 ADCSRA = 0b ; // ADEN = 1: włączamy przetwornik // ADATE = 0: tryb ręczny // ADIE = 0: bez przerwań // ASPS2:0 = 001: prescaler = 2 while(1){ ADCSRA = (1 << ADSC); // krok 2 while (ADCSRA & (1 << ADSC)); // krok 3 result = ADCH; // odczytujemy wynik } }
6 Przetwornik ADC - przykład
7 Pamięci równoległe n linii (bitów) danych m linii (bitów) adresowych Linie sterujące: RD Ŝądanie odczytu (ang. read strobe) WR Ŝądanie zapisu (ang. write strobe) ALE Address Latch Enable niezbędna linia do współdzielenia linii adresowych z liniami danych

8 Pamięci równoległe
9 Pamięci równoległe
10 Źródła sygnału RESET ATmega16 posiada pięć źródeł sygnału reset (omówimy cztery, piąty wykorzystywany jest w interfejsie JTAG). Power-on RESET Układ ten odpowiada za resetowanie mikrokontrolera w sytuacji przywrócenia napięcia zasilającego. Układ utrzymuje sygnał RESET w stanie aktywnym przez określony odcinek czasu (poprzez fusebity). Zewnętrzny sygnał RESET Mikrokontroler jest resetowany kiedy na wejściu RESET (zanegowane) jest niski poziom dłuŝej niŝ minimalna długość impulsu. MoŜemy programowo zresetować mikrokontroler podłączając jeden z pinów IO do wejścia RESET.
11 Źródła sygnału RESET Reset przy obniŝonym napięciu zasilania (Brown-out detector) Układ ten monitoruje napięcie zasialające. Jeśli napięcie spadnie poniŝej pewnego ustalonego poziomu (poprzez fusebity), układ generuje sygnał RESET, aŝ do czasu powrotu napięcia do prawidłowego zakresu. Uwaga: obniŝenie napięcia moŝe skutkować np.uszkodzeniem pamięci EEPROM.
12 Źródła sygnału RESET Układ Watchdog NiezaleŜnie działający podsystem procesora, posiadający własny niezaleŝny zegar. Po skonfigurowaniu i uaktywnieniu działa jak licznik. Po zliczeniu do określonej wartości generuje sygnał RESET. Aby temu zapobiec, program musi co pewien czas wykonać instrukcję zerującą licznik. Wykorzystanie układu Watchdog krytyczne w układach działających bez ingerencji człowieka. Układ po zadziałaniu moŝe generować równieŝ przerwanie (moŝemy je wykorzystać do obsługi niewłaściwego działania programu).
13 Zarządzanie poborem energii Aby zredukować pobór energii moŝna wyłączyć część podsystemów mikrokontrolera. Tryb uśpienia wybiera się przy pomocy bitów SM0-SM2 rejestru SMCR. 6 trybów uśpienia: Idle Mode : wyłączany rdzeń (brak generowania sygnału taktowania CPU i FLASH), działają układy peryferyjne SPI, USART, ADC, TWI, liczniki, Watchdog i system przerwań. CPU jest wybudzany przez przerwanie zewnętrzne, przerwanie licznika lub przerwanie USART. ADC Noise Reduction Mode : Wszystkie podsystemy działają normalnie. Wyłączany jest rdzeń procesora, pamięć FLASH i układy portów IO, co zmniejsza zakłócenia, ułatwiając pomiar ADC.
14 Zarządzanie poborem energii Power-down Mode : Wyłącza większość podsystemów procesora i zewnętrzny oscylator. Działają tylko BOD, Watchdog, TWI i przerwania zewnętrzne. Power-save Mode : j.w. ale działa tylko licznik 2. Standby Mode : identyczny jak Power-down, tyle Ŝe działa oscylator (przyśpiesza to wybudzenie z kilku tysięcy do kilku taktów zegara). Extended Standby Mode : identyczny jak Power-down, tyle Ŝe działa oscylator (przyśpiesza to wybudzenie z kilku tysięcy do kilku taktów zegara). Średnie zuŝycie prądu (zegar 8MHz, Vcc=5V) Active Idle Power-down Power-save Standby 12 ma 6 ma 15 ua 12 ua 140 ua
15 Zarządzanie poborem energii Ilość zuŝywanej przez układy cyfrowe energii zaleŝy od częstotliwości ich przełączania, dlatego naleŝy wybrać moŝliwie niską częstotliwość zegara (m.in. poprzez fusebity). Stan portów IO powinien być ustalony. Wymusić stan wejść przyłączając je do masy lub zasilania. Pływanie potencjału na wejściu powoduje ciągłe przełączanie stanu i zwiększony pobór prądu. Wyłączyć przetwornik ADC, gdy nie jest uŝywany. Wyłączyć komparator analogowy.
16 Fusebity bity konfiguracyjne Niektóre parametry dotyczące konfiguracji fizycznej pracy mikrokontrolerów, moŝna ustawiać nie w sposób programowy (bezpośrednio z kodu programu), lecz w trakcie procesu programowania. Sposób generowania sygnału zegarowego (zewn., wewn., rezonator kwarcowy). Częstotliwość taktowania (domyślnie wewn. zegar taktujący jest dzielony przez 8 uwaga na pomyłki) Odblokowanie interfejsów ISP i JTAG (do programowania) uwaga na pomyłki Poziom brown-out detektora Włączenie watchdoga Zabezpieczenie pamięci EEPROM podczas programowania Wydzielenie obszaru pamięci na bootsektor

17 Bootloader Mikrokontolery serii ATMega wyposaŝone zostały w instrukcje pozwalające programować pamięć Flash z poziomu aplikacji. Dzięki temu istnieje moŝliwość zmiany oprogramowania w mikrokontrolerze poprzez dowolny, wybrany interfejs. Gdy uŝywamy bootloadera, pamięć procesora jest podzielona na dwie części Read While Write (RWW) oraz No Read While Write (NRWW). W przypadku kiedy nie korzystamy z samoprogramowania takiego podziału nie ma. Podczas zapisu RWW praca procesora nie zostaje zatrzymana i moŝliwe jest działanie programu pod warunkiem,ŝe znajduje się on w NRWW. W czasie ładowania programu do RWW nie moŝna odwoływać się do komórek pamięci znajdującej się w tej sekcji, poniewaŝ moŝe to spowodować zawieszenie układu i błąd przy zapisie. Zapis obszaru NRWW wiąŝe się z zatrzymaniem pracy CPU.

18 Bootloader Za pomocą fusebitów moŝemy przesunąć adres startowy programu z 0x0000 do sekcji bootloadera. Po włączeniu zasilania, program bootloadera moŝe oczekiwać na sygnał z dowolnego interfejsu, np. USART. Gdy dane zaczną napływać, bootloader wgra je w odpowiedniej kolejności do obszaru RWW. Po zakończeniu zapisywania danych, nastapi skok pod adres 0x0000 i rozpocznie działanie normalny program. MoŜemy równieŝ skonfigurować mikrokontroler tak, by przenieść adresy wektorów przerwań w obszar NRWW. Przeniesienie przerwań daje nam pewność,ŝe nie odbędzie się skok do RWW (co moŝe się stać, gdy nie zablokujemy przerwań) podczas jej programowania, co moŝe spowodować błąd zapisu.
19 Zabezpieczanie kodu programu Wśród bitów konfiguracyjnych są tzw. lock bity. Ich funkcją jest ochrona pamięci mikrokontrolera przed moŝliwością jej odczytania przy pomocy programatora. Przy próbie odczytu zwracane będą adresy komórek (a nie wartości). Aby skasować lockbity, naleŝy skasować całą pamięć FLASH i EEPROM. Inwazyjne metody łamania zabezpieczeń: odsłonięcie struktury układu scalonego i odczytanie danych za pomocą mikrosond przeprogramowanie bitów zabezpieczających (naświetlanie UV) Nieinwazyjne metody łamania zabezpieczeń: Typowe luki w oprogramowaniu Eavesdropping monitorowanie z wysoką rozdzielczością sygnałów analogowych (np. poboru prądu przez procesor). KaŜda instrukcja przełączając inne bramki logiczne zostawia swój odcisk palca w postaci zakłóceń na nóŝkach układu.

20 Przykład to jest ostatni

21
22
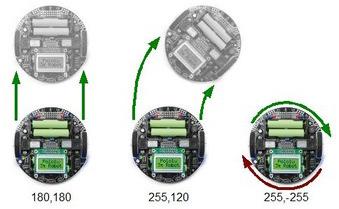


23 Silniki

24 Sensory 1. Wyjście: 10µs impuls na PC0 2. Wejście: mierzymy czas t mierzy ilość odbitego światła
25 DEMO
Wbudowane układy peryferyjne cz. 1 Wykład 7
 Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Wbudowane układy peryferyjne cz. 1 Wykład 7 Wbudowane układy peryferyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach! Ponadto
Programowanie mikrokontrolerów. 8 listopada 2007
 Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Programowanie mikrokontrolerów Marcin Engel Marcin Peczarski 8 listopada 2007 Alfanumeryczny wyświetlacz LCD umożliwia wyświetlanie znaków ze zbioru będącego rozszerzeniem ASCII posiada zintegrowany sterownik
Wbudowane układy peryferyjne cz. 3 Wykład 9
 Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
Wbudowane układy peryferyjne cz. 3 Wykład 9 Komparator analogowy Komparator analogowy 2 Komparator analogowy Pozwala porównać napięcia na wejściu dodatnim i ujemnym Przerwanie może być wywołane obniżeniem
Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1.
 Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Dodatek D 1. Przetwornik analogowo-cyfrowy 1.1. Schemat blokowy Uproszczony schemat blokowy konwertera analogowo-cyfrowego przedstawiony został na rys.1. Rys. 1. Schemat blokowy przetwornika A/C Przetwornik
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy
 Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Mikroprocesory i Mikrosterowniki Analog-Digital Converter Konwerter Analogowo-Cyfrowy Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Zastosowanie przetwornika analogowo-cyfrowego do odczytywania napięcia z potencjometru
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikroprocesory i Mikrokontrolery Zastosowanie przetwornika analogowo-cyfrowego do odczytywania napięcia z potencjometru
PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA PRZETWORNIK ADC w mikrokontrolerach Atmega16-32
Przetworniki analogowo-cyfrowe (A/C)
") Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Przetworniki analogowo-cyfrowe (A/C) Przetworniki analogowo-cyfrowe to urządzenia, przetwarzające ciągły analogowy sygnał wejściowy jedno wejście na odpowiadający mu dyskretny cyfrowy sygnał wyjściowy
Inne układy peryferyjne AVR
 Inne układy peryferyjne AVR Komparator analogowy Komparator rodzaj prostego przetwornika A/C blok pozwalający na dokonanie 1-bitowej konwersji sygnału z postaci analogowej na cyfrową, czyli sprawdzenia
Inne układy peryferyjne AVR Komparator analogowy Komparator rodzaj prostego przetwornika A/C blok pozwalający na dokonanie 1-bitowej konwersji sygnału z postaci analogowej na cyfrową, czyli sprawdzenia
Obsługa przetwornika ADC na mikrokontrolerze ATmega8 CEZARY KLIMASZ OBSŁUGA PRZETWORNIKA ADC NA MIKROKONTROLERZE ATMEGA8
 OBSŁUGA PRZETWORNIKA ADC NA MIKROKONTROLERZE ATMEGA8 Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2008 1 Spis treści 1. Wprowadzenie...
OBSŁUGA PRZETWORNIKA ADC NA MIKROKONTROLERZE ATMEGA8 Opracowanie zawiera treści różnych publikacji takich jak: książki, datasheety, strony internetowe Cezary Klimasz Kraków 2008 1 Spis treści 1. Wprowadzenie...
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów2 2. ISP..2 3. I/O Ports..3 4. External Interrupts..4 5. Analog Comparator5 6. Analog-to-Digital Converter.6 7.
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Układy zegarowe w systemie mikroprocesorowym 1 Sygnał zegarowy, sygnał taktujący W każdym systemie mikroprocesorowym jest wymagane źródło sygnałów zegarowych. Wszystkie operacje wewnątrz jednostki centralnej
Wstęp...9. 1. Architektura... 13
 Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Spis treści 3 Wstęp...9 1. Architektura... 13 1.1. Schemat blokowy...14 1.2. Pamięć programu...15 1.3. Cykl maszynowy...16 1.4. Licznik rozkazów...17 1.5. Stos...18 1.6. Modyfikowanie i odtwarzanie zawartości
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Mikrokontroler AVR ATmega32 - wykład 9
 SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 1 Mikrokontroler AVR ATmega32 - wykład 9 Adam Szmigielski aszmigie@pjwstk.edu.pl SWB - Mikrokontroler AVR ATmega32 - wykład 9 asz 2 CechyµC ATmega32 1.
WYKORZYSTANIE WEWNĘTRZNYCH GENERATORÓW RC DO TAKTOWANIA MIKROKONTROLERÓW AVR
 kpt. mgr inŝ. Paweł HŁOSTA kpt. mgr inŝ. Dariusz SZABRA Wojskowy Instytut Techniczny Uzbrojenia WYKORZYSTANIE WEWNĘTRZNYCH GENERATORÓW RC DO TAKTOWANIA MIKROKONTROLERÓW AVR W niektórych aplikacjach mikroprocesorowych,
kpt. mgr inŝ. Paweł HŁOSTA kpt. mgr inŝ. Dariusz SZABRA Wojskowy Instytut Techniczny Uzbrojenia WYKORZYSTANIE WEWNĘTRZNYCH GENERATORÓW RC DO TAKTOWANIA MIKROKONTROLERÓW AVR W niektórych aplikacjach mikroprocesorowych,
Kurs Elektroniki. Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26
 Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Kurs Elektroniki Część 5 - Mikrokontrolery. www.knr.meil.pw.edu.pl 1/26 Mikrokontroler - autonomiczny i użyteczny system mikroprocesorowy, który do swego działania wymaga minimalnej liczby elementów dodatkowych.
Charakterystyka mikrokontrolerów. Przygotowali: Łukasz Glapiński, Mateusz Kocur, Adam Kokot,
 Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
Charakterystyka mikrokontrolerów Przygotowali: Łukasz Glapiński, 171021 Mateusz Kocur, 171044 Adam Kokot, 171075 Plan prezentacji Co to jest mikrokontroler? Historia Budowa mikrokontrolera Wykorzystywane
MCAR Robot mobilny z procesorem AVR Atmega32
 MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
MCAR Robot mobilny z procesorem AVR Atmega32 Opis techniczny Jakub Kuryło kl. III Ti Zespół Szkół Zawodowych nr. 1 Ul. Tysiąclecia 3, 08-530 Dęblin e-mail: jkurylo92@gmail.com 1 Spis treści 1. Wstęp..
Opis funkcjonalny i architektura. Modu³ sterownika mikroprocesorowego KM535
 Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Opis funkcjonalny i architektura Modu³ sterownika mikroprocesorowego KM535 Modu³ KM535 jest uniwersalnym systemem mikroprocesorowym do pracy we wszelkiego rodzaju systemach steruj¹cych. Zastosowanie modu³u
Mikrokontroler ATmega32. System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe
 Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
Mikrokontroler ATmega32 System przerwań Porty wejścia-wyjścia Układy czasowo-licznikowe 1 Przerwanie Przerwanie jest inicjowane przez urządzenie zewnętrzne względem mikroprocesora, zgłaszające potrzebę
MIKROKONTROLERY I MIKROPROCESORY
 PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
PLAN... work in progress 1. Mikrokontrolery i mikroprocesory - architektura systemów mikroprocesorów ( 8051, AVR, ARM) - pamięci - rejestry - tryby adresowania - repertuar instrukcji - urządzenia we/wy
Zastosowania mikrokontrolerów w przemyśle
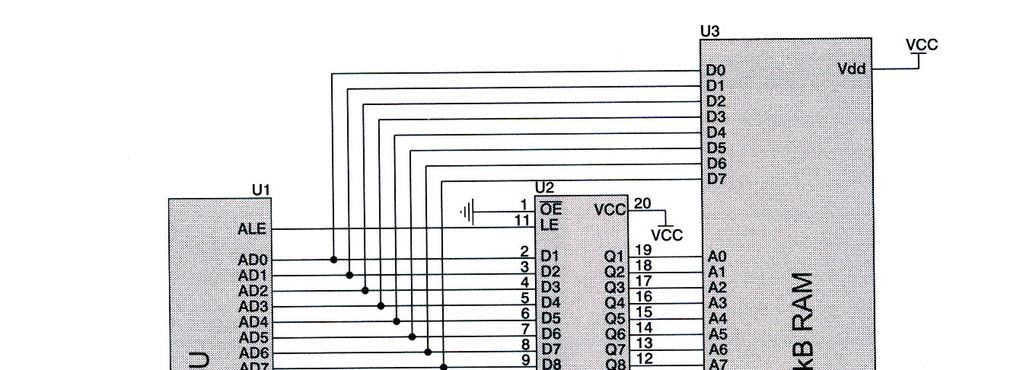
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Współpraca z pamięciami zewnętrznymi Interfejs równoległy (szyna adresowa i danych) Multipleksowanie
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Przetwornik ADC procesora sygnałowego F/C240 i DAC C240 EVM Strona 1 z 7 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1.Budowa przetwornika ADC procesora
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
Programowanie mikrokontrolerów 2.0 Tryby uśpienia Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Zarządzanie energią Często musimy zadbać o zminimalizowanie
E-TRONIX Sterownik Uniwersalny SU 1.2
 Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Obudowa. Obudowa umożliwia montaż sterownika na szynie DIN. Na panelu sterownika znajduje się wyświetlacz LCD 16x2, sygnalizacja LED stanu wejść cyfrowych (LED IN) i wyjść logicznych (LED OUT) oraz klawiatura
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca)
") Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Funkcje sterowania cyfrowego przekształtników (lista nie wyczerpująca) tryb niskiego poboru mocy przełączanie źródeł zasilania łagodny start pamięć i zarządzanie awariami zmiana (nastawa) sygnału odniesienia
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Struktury specjalizowane wykorzystywane w mikrokontrolerach
 Struktury specjalizowane wykorzystywane w mikrokontrolerach Przetworniki analogowo-cyfrowe i cyfrowoanalogowe Interfejsy komunikacyjne Zegary czasu rzeczywistego Układy nadzorujące Układy generacji sygnałów
Struktury specjalizowane wykorzystywane w mikrokontrolerach Przetworniki analogowo-cyfrowe i cyfrowoanalogowe Interfejsy komunikacyjne Zegary czasu rzeczywistego Układy nadzorujące Układy generacji sygnałów
Układy zegarowe w systemie mikroprocesorowym
 Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci
Układy zegarowe w systemie mikroprocesorowym 1 Przykładowa struktura systemu mikroprocesorowego IRQ AcDMA ReDMA Generator zegarowy fx fcpu fio fm System przerwań sprzętowych IRQ Bezpośredni dostęp do pamięci
Magistrala I 2 C. Podstawy systemów mikroprocesorowych. Wykład nr 5 Interfejsy szeregowe c.d.
 Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Magistrala I 2 C Podstawy systemów mikroprocesorowych Wykład nr 5 Interfejsy szeregowe c.d. dr Piotr Fronczak http://www.if.pw.edu.pl/~agatka/psm.html Inter-integrated circuit bus TWI Two-wire Serial Interface
Programowanie mikrokontrolerów 2.0
 4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
4.1 Programowanie mikrokontrolerów 2.0 Taktowanie Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 22 listopada 2016 4.2 Drzewo taktowania w STM32F411 Źródło: RM0383 Reference
Mikroprocesory i Mikrosterowniki Laboratorium
 Laboratorium Ćwiczenie 2 Przetwornik analogowo/cyfrowy (ADC) Program ćwiczenia: obsługa przerwań, obsługa konwertera A/C. Zagadnienia do przygotowania: jak do ćwiczenia 1, rejestry i obsługa konwertera
Laboratorium Ćwiczenie 2 Przetwornik analogowo/cyfrowy (ADC) Program ćwiczenia: obsługa przerwań, obsługa konwertera A/C. Zagadnienia do przygotowania: jak do ćwiczenia 1, rejestry i obsługa konwertera
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Systemy Wbudowane. Arduino, AVR. Arduino. Arduino. Arduino. Oprogramowanie. Mikrokontroler. Mikrokontroler Platforma Arduino. Arduino IDE: Arduino C:
 Mikrokontroler Platforma Systemy Wbudowane IDE:, AVR mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Mikrokontroler AVR Uno Środowisko Terminal Uruchamianie http://home.agh.edu.pl/~mwilkus
Mikrokontroler Platforma Systemy Wbudowane IDE:, AVR mgr inż. Marek Wilkus Wydział Inżynierii Metali i Informatyki Przemysłowej AGH Kraków Mikrokontroler AVR Uno Środowisko Terminal Uruchamianie http://home.agh.edu.pl/~mwilkus
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
2. PORTY WEJŚCIA/WYJŚCIA (I/O)
") 2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
2. PORTY WEJŚCIA/WYJŚCIA (I/O) 2.1 WPROWADZENIE Porty I/O mogą pracować w kilku trybach: - przesyłanie cyfrowych danych wejściowych i wyjściowych a także dla wybrane wyprowadzenia: - generacja przerwania
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści
 Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...5 6. Analog-to-Digital Converter...6
Podstawowe urządzenia peryferyjne mikrokontrolera ATmega8 Spis treści 1. Konfiguracja pinów...2 2. ISP...2 3. I/O Ports...3 4. External Interrupts...4 5. Analog Comparator...5 6. Analog-to-Digital Converter...6
IC200UDR002 ASTOR GE INTELLIGENT PLATFORMS - VERSAMAX NANO/MICRO
 IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
IC200UDR002 8 wejść dyskretnych 24 VDC, logika dodatnia/ujemna. Licznik impulsów wysokiej częstotliwości. 6 wyjść przekaźnikowych 2.0 A. Port: RS232. Zasilanie: 24 VDC. Sterownik VersaMax Micro UDR002
WPROWADZENIE Mikrosterownik mikrokontrolery
 WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
WPROWADZENIE Mikrosterownik (cyfrowy) jest to moduł elektroniczny zawierający wszystkie środki niezbędne do realizacji wymaganych procedur sterowania przy pomocy metod komputerowych. Platformy budowy mikrosterowników:
Część 6. Mieszane analogowo-cyfrowe układy sterowania. Łukasz Starzak, Sterowanie przekształtników elektronicznych, zima 2011/12
 Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
Część 6 Mieszane analogowo-cyfrowe układy sterowania 1 Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu Sterowanie przekształtnikami o dowolnej topologii
Murasaki Zou むらさきぞう v1.1 Opis programowania modułu LPC2368/LPC1768 z wykorzystaniem ISP
 Murasaki Zou むらさきぞう v1.1 Opis programowania modułu LPC2368/LPC1768 z wykorzystaniem ISP Moduł mikroprocesorowy Murasaki Zou v1.1 wyposaŝony jest w jeden z dwóch mikrokontrolerów tj. ARM7 LPC2368, oraz
Murasaki Zou むらさきぞう v1.1 Opis programowania modułu LPC2368/LPC1768 z wykorzystaniem ISP Moduł mikroprocesorowy Murasaki Zou v1.1 wyposaŝony jest w jeden z dwóch mikrokontrolerów tj. ARM7 LPC2368, oraz
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2
 LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
LABORATORIUM - ELEKTRONIKA Układy mikroprocesorowe cz.2 1. Cel ćwiczenia Celem ćwiczenia jest pokazanie budowy systemów opartych na układach Arduino. W tej części nauczymy się podłączać różne czujników,
SML3 październik
 SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
SML3 październik 2005 16 06x_EIA232_4 Opis ogólny Moduł zawiera transceiver EIA232 typu MAX242, MAX232 lub podobny, umożliwiający użycie linii RxD, TxD, RTS i CTS interfejsu EIA232 poprzez złącze typu
ASTOR IC200ALG320 4 wyjścia analogowe prądowe. Rozdzielczość 12 bitów. Kod: B8. 4-kanałowy moduł ALG320 przetwarza sygnały cyfrowe o rozdzielczości 12
 2.11 MODUŁY WYJŚĆ ANALOGOWYCH IC200ALG320 4 wyjścia analogowe prądowe, rozdzielczość 12 bitów IC200ALG321 4 wyjścia analogowe napięciowe (0 10 VDC), rozdzielczość 12 bitów IC200ALG322 4 wyjścia analogowe
2.11 MODUŁY WYJŚĆ ANALOGOWYCH IC200ALG320 4 wyjścia analogowe prądowe, rozdzielczość 12 bitów IC200ALG321 4 wyjścia analogowe napięciowe (0 10 VDC), rozdzielczość 12 bitów IC200ALG322 4 wyjścia analogowe
Programowanie mikrokontrolerów 2.0
 Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Programowanie mikrokontrolerów 2.0 Zegar czasu rzeczywistego Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 5 maja 2015 Zegar czasu rzeczywistego Niezależny układ RTC (ang.
Hardware mikrokontrolera X51
 Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
Hardware mikrokontrolera X51 Ryszard J. Barczyński, 2016 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Hardware mikrokontrolera X51 (zegar)
MODUŁ UNIWERSALNY UNIV 3
 1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
1. Cechy Moduł służy do budowy modułów systemu automatyki domowej HAPCAN. - Zawiera procesor CPU (PIC18F26K80) - Transceiver CAN MCP2551 - Układ wyprowadzeń zgodny z DIL-24 (15,24mm) - Zgodny z CAN 2.0B
Programator ICP mikrokontrolerów rodziny ST7. Full MFPST7. Lite. Instrukcja użytkownika 03/09
 Full Lite MFPST7 Programator ICP mikrokontrolerów rodziny ST7 Instrukcja użytkownika 03/09 Spis treści WSTĘP 3 CZYM JEST ICP? 3 PODŁĄCZENIE PROGRAMATORA DO APLIKACJI 4 OBSŁUGA APLIKACJI ST7 VISUAL PROGRAMMER
Full Lite MFPST7 Programator ICP mikrokontrolerów rodziny ST7 Instrukcja użytkownika 03/09 Spis treści WSTĘP 3 CZYM JEST ICP? 3 PODŁĄCZENIE PROGRAMATORA DO APLIKACJI 4 OBSŁUGA APLIKACJI ST7 VISUAL PROGRAMMER
Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780
 Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Dane techniczne : Wyświetlacz alfanumeryczny LCD zbudowany na sterowniku HD44780 a) wielkość bufora znaków (DD RAM): 80 znaków (80 bajtów) b) możliwość sterowania (czyli podawania kodów znaków) za pomocą
Przetworniki analogowo - cyfrowe CELE ĆWICZEŃ PODSTAWY TEORETYCZNE Zasada pracy przetwornika A/C
 Przetworniki analogowo - cyfrowe CELE ĆWICZEŃ Zrozumienie zasady działania przetwornika analogowo-cyfrowego. Poznanie charakterystyk przetworników ADC0804 i ADC0809. Poznanie aplikacji układów ADC0804
Przetworniki analogowo - cyfrowe CELE ĆWICZEŃ Zrozumienie zasady działania przetwornika analogowo-cyfrowego. Poznanie charakterystyk przetworników ADC0804 i ADC0809. Poznanie aplikacji układów ADC0804
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Programowanie mikrokontrolerów 2.0
 13.1 Programowanie mikrokontrolerów 2.0 Sterowanie fazowe Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Triak Triak jest półprzewodnikowym elementem przełączającym
13.1 Programowanie mikrokontrolerów 2.0 Sterowanie fazowe Marcin Engel Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 19 grudnia 2016 Triak Triak jest półprzewodnikowym elementem przełączającym
Mikroprocesory i Mikrosterowniki
 Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Mikroprocesory i Mikrosterowniki Wykład 1 Wydział Elektroniki Mikrosystemów i Fotoniki dr inż. Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Konsultacje Pn,
Wstęp. Opis ATMEGA128 MINI MODUŁ VE-APS-1406
 ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
ATMEGA128 MINI MODUŁ VE-APS-1406 Wstęp Instrukcja użytkownika Opis Instrukcja prezentuje mini moduł z mikrokontrolerem rodziny AVR (firmy ATMEL) Atmega128 w obudowie TQFP 64. Procesor ATmega128 wyposażony
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Instytut Informatyki Politechnika Poznańska 12 bitowy przetwornik ADC Metoda SAR (ang. successive approximation) Konfigurowalna rozdzielczość: 12b, 10b, 8b,6b Do 19 kanałów analogowych pomiary z 16 źródeł
Instytut Informatyki Politechnika Poznańska 12 bitowy przetwornik ADC Metoda SAR (ang. successive approximation) Konfigurowalna rozdzielczość: 12b, 10b, 8b,6b Do 19 kanałów analogowych pomiary z 16 źródeł
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Szkolenia specjalistyczne AGENDA Programowanie mikrokontrolerów w języku C na przykładzie STM32F103ZE z rdzeniem Cortex-M3 GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com
Interfejs analogowy LDN-...-AN
 Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
Batorego 18 sem@sem.pl 22 825 88 52 02-591 Warszawa www.sem.pl 22 825 84 51 Interfejs analogowy do wyświetlaczy cyfrowych LDN-...-AN zakresy pomiarowe: 0-10V; 0-20mA (4-20mA) Załącznik do instrukcji obsługi
Wbudowane układy komunikacyjne cz. 1 Wykład 10
 Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Wbudowane układy komunikacyjne cz. 1 Wykład 10 Wbudowane układy komunikacyjne UWAGA Nazwy rejestrów i bitów, ich lokalizacja itd. odnoszą się do mikrokontrolera ATmega32 i mogą być inne w innych modelach!
Systemy wbudowane. Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej. Witold Kozłowski
 Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Uniwersytet Łódzki Wydział Fizyki i Informatyki Stosowanej Systemy wbudowane Witold Kozłowski Zakład Fizyki i Technologii Struktur Nanometrowych 90-236 Łódź, Pomorska 149/153 https://std2.phys.uni.lodz.pl/mikroprocesory/
Częstościomierz wysokiej rozdzielczości
 Zakład Elektroniczny SECURUS Marek Pyżalski ul. Poplińskich 11 61-573 Poznań www.securus.com.pl marekp@securus.com.pl Częstościomierz wysokiej rozdzielczości Precyzyjny pomiar częstotliwości klasyczną
Zakład Elektroniczny SECURUS Marek Pyżalski ul. Poplińskich 11 61-573 Poznań www.securus.com.pl marekp@securus.com.pl Częstościomierz wysokiej rozdzielczości Precyzyjny pomiar częstotliwości klasyczną
To jeszcze prostsze, MMcc1100!
 MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
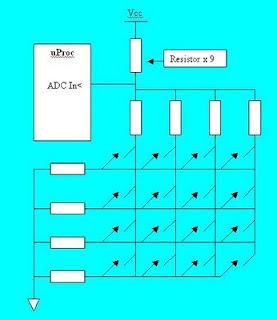
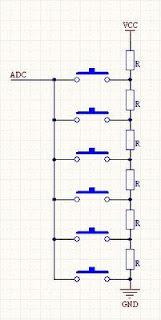
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury
 Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Technika Mikroprocesorowa Laboratorium 5 Obsługa klawiatury Cel ćwiczenia: Głównym celem ćwiczenia jest nauczenie się obsługi klawiatury. Klawiatura jest jednym z urządzeń wejściowych i prawie zawsze występuje
Systemy wbudowane Mikrokontrolery
 Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
Systemy wbudowane Mikrokontrolery Budowa i cechy mikrokontrolerów Architektura mikrokontrolerów rodziny AVR 1 Czym jest mikrokontroler? Mikrokontroler jest systemem komputerowym implementowanym w pojedynczym
ĆWICZENIE. TEMAT: OBSŁUGA PRZETWORNIKA A/C W ukontrolerze 80C535 KEILuVISON
 ĆWICZENIE TEMAT: OBSŁUGA PRZETWORNIKA A/C W ukontrolerze 80C535 KEILuVISON Wiadomości wstępne: Wszystkie sygnały analogowe, które mają być przetwarzane w systemach mikroprocesorowych są próbkowane, kwantowane
ĆWICZENIE TEMAT: OBSŁUGA PRZETWORNIKA A/C W ukontrolerze 80C535 KEILuVISON Wiadomości wstępne: Wszystkie sygnały analogowe, które mają być przetwarzane w systemach mikroprocesorowych są próbkowane, kwantowane
Wyniki (prawie)końcowe - Elektroniczne warcaby
końcowe - Elektroniczne warcaby") Wyniki (prawie)końcowe - Elektroniczne warcaby Zbigniew Duszeńczuk 14 czerwca 2008 Spis treści 1 Stan realizacji projektu na dzień 14 czerwca 2008 2 2 Najważniejsze cechy projektu 2 2.1 Użyte elementy..............................
Wyniki (prawie)końcowe - Elektroniczne warcaby Zbigniew Duszeńczuk 14 czerwca 2008 Spis treści 1 Stan realizacji projektu na dzień 14 czerwca 2008 2 2 Najważniejsze cechy projektu 2 2.1 Użyte elementy..............................
2. Budowa układów procesorowych rodziny TMS320C
 3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
3 Wstęp...8 1. Procesory sygnałowe DSC (Digital Signal Controllers)...11 1.1. Przegląd układów procesorowych czasu rzeczywistego...13 1.2. Procesory rodziny TMS320C2000 firmy Texas Instruments...15 2.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2
 Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Mikroprocesory i Mikrosterowniki Liczniki Timer Counter T/C0, T/C1, T/C2 Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com.
Pobór mocy przez układy mikroprocesorowe
 Pobór mocy przez układy mikroprocesorowe Semestr zimowy 2014/2015, WIEiK-PK 1 Pobór mocy przez układy mikroprocesorowe Wraz z rosnącym zapotrzebowaniem na sprzęt przenośny oraz rosnąca liczba urządzeń
Pobór mocy przez układy mikroprocesorowe Semestr zimowy 2014/2015, WIEiK-PK 1 Pobór mocy przez układy mikroprocesorowe Wraz z rosnącym zapotrzebowaniem na sprzęt przenośny oraz rosnąca liczba urządzeń
Komunikacja w mikrokontrolerach. Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski
 Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
Komunikacja w mikrokontrolerach Wydział Elektroniki Mikrosystemów i Fotoniki Piotr Markowski Treść kursu Programowanie mikrokontrolerów AVR (ATMEL) Orientacja na komunikację międzyukładową w C Literatura
Język C. Wykład 9: Mikrokontrolery cz.2. Łukasz Gaweł Chemia C pokój 307
 Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
Język C Wykład 9: Mikrokontrolery cz.2 Łukasz Gaweł Chemia C pokój 307 lukasz.gawel@pg.edu.pl Pierwszy program- powtórka Częstotliwość zegara procesora μc (należy sprawdzić z kartą techniczną μc) Dodaje
start Program mikroprocesorowego miernika mocy generowanej $crystal = deklaracja
 ----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
----------------------------start---------------------------- Program mikroprocesorowego miernika mocy generowanej $crystal = 8000000 deklaracja częstotliwości kwarcu taktującego uc $regfile "m8def.dat"
Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU
 Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU wersja 2.1 Moduł X3-DIL64 umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU oraz naukę programowania nowoczesnych mikrokontrolerów
Moduł prototypowy X3-DIL64 z procesorem ATxmega128A3U-AU wersja 2.1 Moduł X3-DIL64 umożliwia prototypowanie urządzeń z wykorzystaniem procesora ATmega128A3U-AU oraz naukę programowania nowoczesnych mikrokontrolerów
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
LABORATORIUM UKŁADÓW PROGRAMOWALNYCH. PROCESORY OSADZONE kod kursu: ETD 7211 SEMESTR ZIMOWY 2017
 Politechnika Wrocławska, Wydział Elektroniki Mikrosystemów i Fotoniki Wydziałowy Zakład Metrologii Mikro- i Nanostruktur LABORATORIUM UKŁADÓW PROGRAMOWALNYCH PROCESORY OSADZONE kod kursu: ETD 7211 SEMESTR
Politechnika Wrocławska, Wydział Elektroniki Mikrosystemów i Fotoniki Wydziałowy Zakład Metrologii Mikro- i Nanostruktur LABORATORIUM UKŁADÓW PROGRAMOWALNYCH PROCESORY OSADZONE kod kursu: ETD 7211 SEMESTR
Programowanie mikrokontrolerów AVR z rodziny ATmega.
 Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
Programowanie mikrokontrolerów AVR z rodziny ATmega. Materiały pomocnicze Jakub Malewicz jakub.malewicz@pwr.wroc.pl Wszelkie prawa zastrzeżone. Kopiowanie w całości lub w częściach bez zgody i wiedzy autora
1. Wprowadzenie Programowanie mikrokontrolerów Sprzęt i oprogramowanie... 33
 Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
Spis treści 3 1. Wprowadzenie...11 1.1. Wstęp...12 1.2. Mikrokontrolery rodziny ARM...13 1.3. Architektura rdzenia ARM Cortex-M3...15 1.3.1. Najważniejsze cechy architektury Cortex-M3... 15 1.3.2. Rejestry
. Polski. Dekoder rozjazdów GEODec C1O. DEKODER ROZJAZDÓW ROCO GeoLine. GEODec C1O. Instrukcja obsługi, programowania i budowy dekodera
 DEKODER ROZJAZDÓW ROCO GeoLine GEODec C1O Instrukcja obsługi, programowania i budowy dekodera Wprowadzenie 1 Funkcje dekodera 2 Instalacja 2 Programowanie 3 Ustawienie adresu urządzenia 3 Konfiguracja
DEKODER ROZJAZDÓW ROCO GeoLine GEODec C1O Instrukcja obsługi, programowania i budowy dekodera Wprowadzenie 1 Funkcje dekodera 2 Instalacja 2 Programowanie 3 Ustawienie adresu urządzenia 3 Konfiguracja
Projekt MARM. Dokumentacja projektu. Łukasz Wolniak. Stacja pogodowa
 Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Projekt MARM Dokumentacja projektu Łukasz Wolniak Stacja pogodowa 1. Cel projektu Celem projektu było opracowanie urządzenia do pomiaru temperatury, ciśnienia oraz wilgotności w oparciu o mikrokontroler
Przystawka oscyloskopowa z analizatorem stanów logicznych. Seria DSO-29xxA&B. Skrócona instrukcja użytkownika
 Przystawka oscyloskopowa z analizatorem stanów logicznych Seria DSO-29xxA&B Skrócona instrukcja użytkownika Zawartość zestawu: Przystawka DSO-29XXA lub DSO-29XXB Moduł analizatora stanów logicznych Sondy
Przystawka oscyloskopowa z analizatorem stanów logicznych Seria DSO-29xxA&B Skrócona instrukcja użytkownika Zawartość zestawu: Przystawka DSO-29XXA lub DSO-29XXB Moduł analizatora stanów logicznych Sondy
Instytut Teleinformatyki
 Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Przetwornik ADC laboratorium: 04 autor: mgr inż. Katarzyna Smelcerz Kraków, 2016
Instytut Teleinformatyki Wydział Fizyki, Matematyki i Informatyki Politechnika Krakowska Mikrokontrolery i Mikroprocesory Przetwornik ADC laboratorium: 04 autor: mgr inż. Katarzyna Smelcerz Kraków, 2016
Wykład 4. Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430
 Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Wykład 4 Przegląd mikrokontrolerów 16-bit: - PIC24 - dspic - MSP430 Mikrokontrolery PIC Mikrokontrolery PIC24 Mikrokontrolery PIC24 Rodzina 16-bitowych kontrolerów RISC Podział na dwie podrodziny: PIC24F
Aplikacja czujnika temperatury dla modułu uniwersalnego UNIV 1.0 i procesora UNIV 1.0 (CPU)
") Aplikacja czujnika temperatury dla modułu uniwersalnego UNIV 1.0 i procesora UNIV 1.0 (CPU) Cechy: Z uŝyciem cyfrowych sensorów DS18B20, DS18B20-PAR lub DS1822, DS1822-PAR. Mierzy temperaturę od -55 C
Aplikacja czujnika temperatury dla modułu uniwersalnego UNIV 1.0 i procesora UNIV 1.0 (CPU) Cechy: Z uŝyciem cyfrowych sensorów DS18B20, DS18B20-PAR lub DS1822, DS1822-PAR. Mierzy temperaturę od -55 C
Wyjście do drukarki Centronix
 Wyjście do drukarki Centronix Model M-0 do Dydaktycznego Systemu Mikroprocesorowego DSM-1 Instrukcja uŝytkowania Copyright 2007 by MicroMade All rights reserved Wszelkie prawa zastrzeŝone MicroMade Gałka
Wyjście do drukarki Centronix Model M-0 do Dydaktycznego Systemu Mikroprocesorowego DSM-1 Instrukcja uŝytkowania Copyright 2007 by MicroMade All rights reserved Wszelkie prawa zastrzeŝone MicroMade Gałka
Magistrala SPI. Linie MOSI i MISO sąwspólne dla wszystkich urządzeńna magistrali, linia SS jest prowadzona do każdego Slave oddzielnie.
 Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
Magistrala SPI Magistrala SPI składa się z linii: MOSI Master output Slave input MISO Master input Slave Output SCK Clock SS Slave select (CS Chip Select lub CE Chip Enable) Sygnał taktujący transmisję
STM32Butterfly2. Zestaw uruchomieniowy dla mikrokontrolerów STM32F107
 Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Zestaw uruchomieniowy dla mikrokontrolerów STM32F107 STM32Butterfly2 Zestaw STM32Butterfly2 jest platformą sprzętową pozwalającą poznać i przetestować możliwości mikrokontrolerów z rodziny STM32 Connectivity
Metody obsługi zdarzeń
 SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
SWB - Przerwania, polling, timery - wykład 10 asz 1 Metody obsługi zdarzeń Przerwanie (ang. Interrupt) - zmiana sterowania, niezależnie od aktualnie wykonywanego programu, spowodowana pojawieniem się sygnału
Mikroprocesory i mikrosterowniki
 Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
Mikroprocesory i mikrosterowniki Wykład 1 wstęp, budowa mikrokontrolera Wydział Elektroniki Mikrosystemów i Fotoniki Na prawach rękopisu. Na podstawie dokumentacji ATmega8535, www.atmel.com. Piotr Markowski
SYSTEM PRZERWAŃ ATmega 32
 Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
Zachodniopomorski Uniwersytet Technologiczny WYDZIAŁ ELEKTRYCZNY Katedra Inżynierii Systemów, Sygnałów i Elektroniki LABORATORIUM TECHNIKA MIKROPROCESOROWA SYSTEM PRZERWAŃ ATmega 32 Opracował: mgr inż.
Układy czasowo-licznikowe w systemach mikroprocesorowych
 Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Układy czasowo-licznikowe w systemach mikroprocesorowych 1 W każdym systemie mikroprocesorowym znajduje zastosowanie układ czasowy lub układ licznikowy Liczba liczników stosowanych w systemie i ich długość
Komunikacja w mikrokontrolerach Laboratorium
 Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Laboratorium Ćwiczenie 2 Magistrala UART Program ćwiczenia: konfiguracja transmisji danych między komputerem PC a mikrokontrolerem przy użyciu magistrali UART. Zagadnienia do przygotowania: podstawy programowania
Język C dla mikrokontrolerów AVR. Od podstaw do zaawansowanych aplikacji. Wydanie II
 Język C dla mikrokontrolerów AVR. Od podstaw do zaawansowanych aplikacji. Wydanie II Wstęp do wydania drugiego (13) Wstęp (15) Kody przykładów (16) Schematy (16) Wymagane części (16) Wsparcie (18) Rozdział
Język C dla mikrokontrolerów AVR. Od podstaw do zaawansowanych aplikacji. Wydanie II Wstęp do wydania drugiego (13) Wstęp (15) Kody przykładów (16) Schematy (16) Wymagane części (16) Wsparcie (18) Rozdział
Konfigurator Modbus. Instrukcja obsługi programu Konfigurator Modbus. wyprodukowano dla
 Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
Wersja 1.1 29.04.2013 wyprodukowano dla 1. Instalacja oprogramowania 1.1. Wymagania systemowe Wspierane systemy operacyjne (zarówno w wersji 32 i 64 bitowej): Windows XP Windows Vista Windows 7 Windows
XMEGA. Warsztaty CHIP Rok akademicki 2014/2015
 XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
XMEGA Warsztaty CHIP Rok akademicki 2014/2015 Plan warsztatów: Wprowadzenie do Atmel Studio (20/11/2014) Porty I/O (20/11/2014) Przerwania (27/11/2014) Wykorzystana literatura: [1] Dokumentacja ATMEL(www.atmel.com):
Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości
 Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Politechnika Lubelska Wydział Elektrotechniki i Informatyki PRACA DYPLOMOWA MAGISTERSKA Zastosowanie procesorów AVR firmy ATMEL w cyfrowych pomiarach częstotliwości Marcin Narel Promotor: dr inż. Eligiusz
Kod produktu: MP01105T
 MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
MODUŁ INTERFEJSU DO POMIARU TEMPERATURY W STANDARDZIE Właściwości: Urządzenie stanowi bardzo łatwy do zastosowania gotowy interfejs do podłączenia max. 50 czujników temperatury typu DS18B20 (np. gotowe
Część 5. Mieszane analogowo-cyfrowe układy sterowania
 Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
Część 5 Mieszane analogowo-cyfrowe układy sterowania Korzyści z cyfrowego sterowania przekształtników Zmniejszenie liczby elementów i wymiarów układu obwody sterowania, zabezpieczeń, pomiaru, kompensacji
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ. Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240
 LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240 Strona 1 z 12 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1. Mechanizm przerwań
LABORATORIUM PROCESORY SYGNAŁOWE W AUTOMATYCE PRZEMYSŁOWEJ Mechanizm przerwań i menadżer zdarzeń procesora sygnałowego F/C240 Strona 1 z 12 Opracował mgr inż. Jacek Lis (c) ZNE 2004 1. Mechanizm przerwań
KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA
 Mikrokontrolery AVR KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA Wyprowadzenia Każdy z mikrokontrolerów posiada pewną liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.
Mikrokontrolery AVR KOMUNIKACJA Z OTOCZENIEM MIKROKONTROLERA Wyprowadzenia Każdy z mikrokontrolerów posiada pewną liczbę wyprowadzeń cyfrowych które służą do wprowadzania i odbierania informacji z mikrokontrolera.