PRACA DYPLOMOWA INŻYNIERSKA
|
|
|
- Bartosz Jabłoński
- 9 lat temu
- Przeglądów:
Transkrypt
1 Imię i nazwisko studenta: Mateusz Mania Nr albumu: Studia pierwszego stopnia Forma studiów: stacjonarne Kierunek studiów: Geodezja i kartografia Specjalność/profil: Geodezja inżynieryjna PRACA DYPLOMOWA INŻYNIERSKA Tytuł pracy w języku polskim: Obliczanie wartości współczynników geometrycznych DOP w systemach GNSS z wykorzystaniem danych almanac Tytuł pracy w języku angielskim: Calculation of geometrical indicators DOP in GNSS systems using almanac data Potwierdzenie przyjęcia pracy Opiekun pracy dr inż. Aleksander Nowak podpis Kierownik Katedry/Zakładu dr hab. inż. Marek Przyborski prof. nadzw. PG podpis Data oddania pracy do dziekanatu:

,")
2 OŚWIADCZENIE Imię i nazwisko: Mateusz Mania Data i miejsce urodzenia: r., Gdynia Nr albumu: Wydział: Wydział Inżynierii Lądowej i Środowiska Kierunek: Geodezja i kartografia Poziom studiów: I stopnia inżynierskie Forma studiów: stacjonarne Ja, niżej podpisany(a), wyrażam zgodę/nie wyrażam zgody* na korzystanie z mojej pracy dyplomowej zatytułowanej: Obliczanie wartości współczynników geometrycznych DOP w systemach GNSS z wykorzystaniem danych almanac do celów naukowych lub dydaktycznych. 1 Gdańsk, dnia r.... podpis studenta Świadomy(a) odpowiedzialności karnej z tytułu naruszenia przepisów ustawy z dnia 4 lutego 1994 r. o prawie autorskim i prawach pokrewnych (Dz. U. z 2006 r., nr 90, poz. 631) i konsekwencji dyscyplinarnych określonych w ustawie Prawo o szkolnictwie wyższym (Dz. U. z 2012 r., poz. 572 z późn. zm.), 2 a także odpowiedzialności cywilno-prawnej oświadczam, że przedkładana praca dyplomowa została opracowana przeze mnie samodzielnie. Niniejsza(y) praca dyplomowa nie była wcześniej podstawą żadnej innej urzędowej procedury związanej z nadaniem tytułu zawodowego. Wszystkie informacje umieszczone w ww. pracy dyplomowej, uzyskane ze źródeł pisanych i elektronicznych, zostały udokumentowane w wykazie literatury odpowiednimi odnośnikami zgodnie z art. 34 ustawy o prawie autorskim i prawach pokrewnych. Potwierdzam zgodność niniejszej wersji pracy dyplomowej z załączoną wersją elektroniczną. Gdańsk, dnia r.... podpis studenta Upoważniam Politechnikę Gdańską do umieszczenia ww. pracy dyplomowej w wersji elektronicznej w otwartym, cyfrowym repozytorium instytucjonalnym Politechniki Gdańskiej oraz poddawania jej procesom weryfikacji i ochrony przed przywłaszczaniem jej autorstwa. Gdańsk, dnia r.... podpis studenta *) niepotrzebne skreślić 1 Zarządzenie Rektora Politechniki Gdańskiej nr 34/2009 z 9 listopada 2009 r., załącznik nr 8 do instrukcji archiwalnej PG. 2 Ustawa z dnia 27 lipca 2005 r. Prawo o szkolnictwie wyższym: Art. 214 ustęp 4. W razie podejrzenia popełnienia przez studenta czynu podlegającego na przypisaniu sobie autorstwa istotnego fragmentu lub innych elementów cudzego utworu rektor niezwłocznie poleca przeprowadzenie postępowania wyjaśniającego. Art. 214 ustęp 6. Jeżeli w wyniku postępowania wyjaśniającego zebrany materiał potwierdza popełnienie czynu, o którym mowa w ust. 4, rektor wstrzymuje postępowanie o nadanie tytułu zawodowego do czasu wydania orzeczenia przez komisję dyscyplinarną oraz składa zawiadomienie o popełnieniu przestępstwa.
 odpowiedzialności karnej z tytułu naruszenia przepisów ustawy z dnia 4 lutego 1994 r.")
3 STRESZCZENIE Do poprawnego działania, odbiorniki nawigacji satelitarnej GPS (ang.: Global Positioning System) wymagają uzyskania synchronizacji z sygnałami satelitów znajdujących się ponad ustaloną minimalną wysokością topocentryczną. Czas do uzyskania pierwszej pozycji przez odbiornik nawigacyjny zależny jest między innymi od możliwości określenia zbioru satelitów, których sygnały będą dostępne dla współrzędnych pozycji urządzenia w określonym momencie czasu, a wpływ na to ma aktualność zbioru danych satelitarnych (almanac) pobranych podczas poprzedniego uruchomienia. Możliwości wykorzystania systemu GPS w nawigacji i transporcie zależą również od dokładności określenia przez niego pozycji. Dwoma zasadniczymi czynnikami decydującymi o niej są wartości błędu pomiaru odległości użytkownika URE (ang.: User Range Error) oraz współczynników geometrycznych DOP (ang.: Dilution of Precision), ściśle związanych z liczbą satelitów wchodzących w skład konstelacji. Nominalna konstelacja satelitów GPS wynosi 24 sztuki, zapewniając możliwość określenia współrzędnych pozycji na obszarze całego globu. Jednakże w ostatnich latach konstelacja znacznie przekracza liczbę nominalną satelitów, jak również wartość URE ulega ciągłej poprawie. W niniejszej pracy przedstawiono podstawy teoretyczne ruchu sztucznego satelity Ziemi oraz jego parametry orbitalne i w tym kontekście szczegółowo omówiono formaty danych plików almanac GPS zapisane w publicznie dostępnych standardach SEM (ang.: System Effectiveness Model) i YUMA. Podjęto także próbę oszacowania wpływu zmieniającej się liczby satelitów GPS na dokładność określenia współrzędnych pozycji przy zmiennej wartości URE. Zaprezentowano model matematyczny wyznaczania wartości współczynników geometrycznych z wykorzystaniem danych pochodzących z plików almanac. W oparciu o opracowany algorytm oraz obliczenia wykonane w oprogramowaniu Mathcad dokonano analizy porównawczej średnich dobowych wartości współczynników DOP dla zmiennej liczby satelitów stanowiącej konstelację GPS w latach W dalszej kolejności wyznaczono reprezentatywne wartości podwójnego błędu średniego pozycji (2drms two distance root mean square) 2D i 3D oraz obliczono procentowy wzrost dokładności pozycji w rozważanym okresie. Słowa kluczowe: GPS, almanac, współczynniki geometryczne, dokładność pozycji. Dziedzina nauki i techniki, zgodnie z wymogami OECD: inżynieria lądowa. 3
 pobranych podczas poprzedniego uruchomienia.")
4 ABSTRACT Starting a GPS (Global Positioning System) receiver requires the synchronization of the signals of satellites above the minimum topocentric height. Time to obtain first position by the navigation receiver depends on the possibility of identifying a set of satellites whose signals will be available on the coordinate position of the device at a specific point in time and it depends on the current set of satellite data (almanac) taken during the previous run. A possibility of utilising the GPS system for navigation and transport are fundamentally dependant on the accuracy of positioning. Two fundamental factors decisive for its value are the values of the User Range Error (URE) and Dilution of Precision (DOP), strictly related to the number of satellites forming the constellation. The nominal constellation of GPS satellites consists of 24 units, which gives a possibility of identification of coordinates all over the globe. In the last few years, however, the nominal number of satellites in the constellation was much higher, and the URE value has been constantly increasing. The thesis presents the theoretical basis of movement of the artificial satellites of the Earth, its orbital parameters and in regards to that, data formats of GPS almanac files stored on publicly available standards, SEM (System Effectiveness Model) and YUMA discussed in detail. The author of the thesis tries to estimate the impact of the changing number of GPS satellites on accuracy position coordinates with a variable URE value. Mathematical model for estimating geometrical indicators' value, utilising data derived from the almanac files has been presented. Following a drawn-up algorithm and calculations made with Mathcad software, the author carried out a comparative analysis of mean daily values of DOP indicators for a variable number of satellites included in the GPS constellation in the years Then, the author has established representative values of two distance root mean square error (2drms) 2D and 3D, and calculated a percentage increase of accuracy in the period under discussion. Keywords: GPS, Almanac, Dilution of Precision, Accuracy of Positioning. Field of science and technology, in accordance with the requirements of the OECD: civil engineering. 4

5 SPIS TREŚCI WYKAZ WAŻNIEJSZYCH OZNACZEŃ I SKRÓTÓW WSTĘP I CEL PRACY PARAMETRY RUCHU SZTUCZNEGO SATELITY ZIEMI W ZAPISIE ALMANAC Niezaburzony ruch sztucznego satelity Ziemi Dane almanac Przeznaczenie danych almanac Generowanie informacji almanac GPS Format SEM Format YUMA WYZNACZANIE WSPÓŁCZYNNIKÓW GEOMETRYCZNYCH DOP NA MOMENT OBSERWACJI Współczynniki geometryczne DOP i ich minimalizacja Model matematyczny wyznaczania wartości współczynników geometrycznych z wykorzystaniem danych pochodzących z plików almanac BADANIE DOKŁADNOŚCI SYSTEMU GPS W FUNKCJI DOP I INNYCH ZMIENNYCH Dokładność określania współrzędnych pozycji Badania symulacyjne PODSUMOWANIE WYKAZ LITERATURY WYKAZ RYSUNKÓW WYKAZ TABEL Dodatek A: Algorytm wykonany w programie Mathcad do wyznaczania współczynników geometrycznych DOP

6 WYKAZ WAŻNIEJSZYCH OZNACZEŃ I SKRÓTÓW a duża półoś orbity [m] a e a f0 a f1 A Az b b e B C duża półoś elipsoidy WGS-84: m korekta zegara zerowego rzędu [s] korekta zegara pierwszego rzędu [s/s] błąd położenia satelity mierzony wzdłuż jego trajektorii [m] azymut satelity [rad] mała półoś orbity [m] mała półoś elipsoidy WGS-84: , m szerokość geodezyjna [rad] błąd położenia satelity mierzony prostopadle do jego trajektorii [m] C macierz kowariancji [ ] e mimośród orbity [ ] e e mimośród elipsoidy [ ] el wysokość topocentryczna satelity [rad] E anomalia ekscentryczna [rad] F macierz transformacji pomiędzy układami ECEF i ENU [ ] G macierz gradientów linii pozycyjnych [ ] h wysokość geodezyjna [m] i inklinacja orbity [rad] i 0 wartość referencyjna inklinacji orbity: 54 L długość geodezyjna [rad] M anomalia średnia [rad] M 0 M k n indeks [ ] n 0 N anomalia średnia w momencie generacji pliku almanac [rad] anomalia średnia odniesiona do momentu obserwacji [rad] początkowa wartość ruchu średniego satelity [rad/s] promień krzywizny przekroju południkowego elipsoidy [m] p prawdopodobieństwo [ ] r promień orbity [m] R błąd położenia satelity mierzony wzdłuż promienia jego orbity [m] t czas GPS dla którego wyznacza się współczynniki geometryczne [s] t k t oa T T p x ENU, y ENU, z ENU x k, y k x s, y s, z s czas jaki upłynął od momentu, w którym zostały wygenerowane dane almanac [s] czas GPS, w którym został wygenerowany plik almanac [s] błąd zegara satelity [m] moment przejścia satelity perygeum [s] współrzędne satelity w układzie ENU [m] współrzędne satelity w płaszczyźnie orbity [m] współrzędne satelity w układzie ECEF [m] 6
![satelity mierzony prostopadle do jego trajektorii [m] C macierz kowariancji [ ] e mimośród orbity [ ] e e mimośród elipsoidy [ ] el wysokość topocentryczna satelity [rad] E anomalia ekscentryczna](/docs-images/45/12462325/images/page_6.jpg "[rad] F macierz transformacji pomiędzy układami ECEF i ENU [ ] G macierz gradientów linii pozycyjnych [ ] h wysokość geodezyjna [m] i inklinacja orbity [rad] i 0 wartość referencyjna inklinacji")
7 x u, y u, z u współrzędne obserwatora w układzie ECEF [m] δi offset inklinacji orbity [rad] μ parametr grawitacyjny: 3, m 3 /s 2 ν anomalia prawdziwa [rad] σ odchylenie standardowe [ ] Φ argument szerokości [rad] ω argument perygeum [rad] Ω długość węzła wstępującego orbity [rad] Ω 0 Ω d Ω e Ω k długość węzła wstępującego orbity w momencie generacji pliku almanac [rad] zmiana rektascensji w funkcji czasu [rad/s] szybkość obrotu Ziemi: 7, rad/s długość węzła wstępującego orbity odniesiona do momentu obserwacji [rad] 2 SOPS 2d Space Operations Squadron 2drms two distance root mean square A-S Anti-Spoofing AIS Automatic Identification System AMCS Alternate Master Control Station ASCII American Standard Code for Information Interchange DHS USCG Department of Homeland Security United States Coast Guard DOP Dilution of Precision DOT FAA Department of Transportation Federal Aviation Administration drms distance root mean square ECDIS Electronic Chart Display and Information System ECEF Earth-Centered, Earth-Fixed ENU East, North, Up FAA Federal Aviation Administration GDOP Geometric Dilution of Precision GIS Geographic Information System GNSS Global Navigation Satellite Systems GPS Global Positioning System GPS CS Global Positioning System Control Segment HDOP Horizontal Dilution of Precision MCS Master Control Station NANU Notice Advisory to Navstar Users NIPRNet Nonsecure Internet Protocol Router Network OA Operational Advisory OCX Next Generation Operational Control System PDOP Position Dilution of Precision PPS Precise Positioning Service 7
![rektascensji w funkcji czasu [rad/s] szybkość obrotu Ziemi: 7,2921151467 10 5 rad/s długość węzła wstępującego orbity odniesiona do momentu obserwacji [rad] 2 SOPS 2d Space Operations Squadron 2drms](/docs-images/45/12462325/images/page_7.jpg "two distance root mean square A-S Anti-Spoofing AIS Automatic Identification System AMCS Alternate Master Control Station ASCII American Standard Code for Information Interchange DHS USCG Department")
8 PRN Pseudorandom Noise rms root mean square SA Selective Availability SAFB Schriever Air Force Base SEM System Effectiveness Model SIPRNet Secret Internet Protocol Router Network SPS Standard Positioning Service SVN Space Vehicle Number TDOP Time Dilution of Precision U.S. DoD United States Department of Defense UEE User Equipment Error UERE User Equivalent Range Error URA User Range Accuracy URE User Range Error USCG NAVCEN United States Coast Guard Navigation Center USNO United States Naval Observatory UTC Coordinated Universal Time VAFB Vandenberg Air Force Base VDOP Vertical Dilution of Precision WGS-84 World Geodetic System 84 8

9 1. WSTĘP I CEL PRACY Satelitarne systemy GNSS (ang.: Global Navigation Satellite Systems) odgrywają fundamentalną rolę w procesie nawigacji obiektów oraz realizacji pomiarów geodezyjnych [19, 28]. Wykorzystywane są powszechnie we współczesnej, profesjonalnej nawigacji morskiej [3, 32, 33] oraz lotniczej [26], będąc podstawowym źródłem pozycjonowania dla rozwijającej się, względem klasycznej nawigacji [4], koncepcji e-navigation oraz stanowiąc istotny element wykorzystania elektronicznych pomocy nawigacyjnych, jakimi są zobrazowania ECDIS (ang.: Electronic Chart Display and Information System) [35]. Systemy GNSS są również elementem innych złożonych technologii zapewniających bezpieczeństwo, do których należy system automatycznej identyfikacji AIS (ang.: Automatic Identification System) [5, 18], czy systemy podejścia do lądowania statków powietrznych [24]. W geodezji stosowanie technik satelitarnych wykorzystujących aktywne sieci geodezyjne [19, 28], gdzie planowanie kampanii w oparciu o dane almanac i współczynniki geometryczne DOP (ang.: Dilution of Precision) stanowi kluczowy element realizacji precyzyjnych pomiarów inżynierskich, jest powszechne, głównie ze względu na rozległą aplikacyjność, obejmującą w szczególności geodezję inżynieryjną, diagnostykę [19, 20, 21] oraz systemy informacji geograficznej GIS (ang.: Geographic Information System) [26]. Równocześnie, niezmiernie szybko rozwija się rynek odbiorników personalnych, funkcjonujących w obszarze nawigacji lądowej, obejmując aplikacje transportowe, rekreacyjne czy sportowe [29, 30], a charakterystyki dokładności, bezpośrednio związane z dostępną użytkownikowi w momencie pomiaru konstelacją satelitów, stanowią czynnik decydujący o dokładności i dostępności systemów GNSS. Mając na względzie przedstawione powyżej rozważania, warto, w ramach pracy dyplomowej inżynierskiej, podjąć następujący temat: Obliczanie wartości współczynników geometrycznych DOP w systemach GNSS z wykorzystaniem danych almanac. Głównym celem niniejszej pracy jest stworzenie modelu matematycznego za pomocą którego, na podstawie danych almanac, można wyznaczyć współczynniki geometryczne DOP i określić ich wpływ na dokładność wyznaczania pozycji. Aby zrealizować cel główny należy podjąć następujące cele cząstkowe: opisać podstawy teoretyczne ruchu sztucznego satelity Ziemi; scharakteryzować parametry orbitalne satelitów GNSS; przedstawić zastosowanie danych almanac; określić sposób generowania informacji almanac; omówić formaty plików almanac i różnice między nimi; scharakteryzować współczynniki geometryczne DOP; poruszyć zagadnienie minimalizacji DOP; stworzyć model matematyczny wyznaczania wartości współczynników geometrycznych z wykorzystaniem danych almanac; opisać czynniki wpływające na dokładność określania pozycji; 9
![nawigacji [4], koncepcji e-navigation oraz stanowiąc istotny element wykorzystania elektronicznych pomocy nawigacyjnych, jakimi są zobrazowania ECDIS (ang.](/docs-images/45/12462325/images/page_9.jpg ": Electronic Chart Display and Information System) [35].")
10 oszacować wpływ zmieniającej się liczby satelitów na dokładność określania pozycji. W związku z koniecznością realizacji celu głównego i celów cząstkowych niniejsza praca dyplomowa zawiera trzy zasadnicze rozdziały stanowiące jej trzon: rozdział I Parametry ruchu sztucznego satelity Ziemi w zapisie almanac, w którym opisano podstawy teoretyczne ruchu sztucznego satelity Ziemi, scharakteryzowano jego parametry orbitalne, określono sposób generowania danych almanac, ich zastosowanie oraz formaty zapisu i różnice między nimi; rozdział II Wyznaczanie współczynników geometrycznych DOP na moment obserwacji, w którym scharakteryzowano współczynniki geometryczne DOP, poruszono zagadnienie ich minimalizacji oraz przedstawiono model matematyczny ich wyznaczania z wykorzystaniem danych almanac; rozdział III Badanie dokładności systemu GPS w funkcji DOP i innych zmiennych, w którym opisano czynniki wpływające na dokładność określania pozycji i oszacowano jak wpływa na nią zmieniająca się liczba satelitów. 10

11 2. PARAMETRY RUCHU SZTUCZNEGO SATELITY ZIEMI W ZAPISIE ALMANAC 2.1. Niezaburzony ruch sztucznego satelity Ziemi Sztucznym satelitą Ziemi nazywamy obiekt, któremu na pewnej wysokości nadana jest prędkość wystarczająco duża do uzyskania ruchu dookoła Ziemi po kołowej lub eliptycznej orbicie bez dalszego dostarczania energii. Jego ruch względem ciała centralnego, w najbardziej uproszczonej formie, jest typowym ruchem po okręgu, którego istotą jest zmiana kierunku wektora prędkości liniowej, skutkująca występowaniem przyspieszenia i siły dośrodkowej, co obrazuje rys W rozważanym ruchu po okręgu siłą dośrodkową jest siła przyciągania ziemskiego, wynikająca z prawa powszechnego ciążenia. Rys Uproszczony model ruchu sztucznego satelity Ziemi [27] Ten prosty model zakłada szereg uproszczeń, między innymi pominięcie oddziaływania grawitacyjnego innych ciał takich jak Słońce i Księżyc oraz traktowanie satelity i Ziemi jak punktów materialnych. Tak poczynione założenia pozwalają zaklasyfikować ruch satelity jako keplerowski, to znaczy taki, w którym prawa Keplera wystarczająco precyzyjnie przybliżają jego trajektorię. Co prawda prawa Keplera dotyczą ruchu planet, ale równie dobrze można je stosować do opisu układu dwóch ciał takich jak Ziemia i jego sztuczny satelita. Treść trzech praw Keplera przedstawia się następująco: każda planeta krąży po orbicie eliptycznej, a Słońce znajduje się w jednym z dwóch ognisk elipsy; promień wodzący poprowadzony ze środka Słońca do środka planety zakreśla równe pola powierzchni w równych odstępach czasu; sześciany dużych półosi orbit jakichkolwiek dwóch planet mają się tak do siebie, jak kwadraty ich okresów obiegu. Współrzędne ortokartezjańskie poruszającego się po orbicie wokółziemskiej satelity można jednoznacznie opisać w funkcji czasu przy pomocy pewnych parametrów zwanych elementami orbity oraz ich anomaliami. W przypadku orbity eliptycznej, charakterystycznej dla wszystkich systemów GNSS, są nimi [27]: 11

12 a długość dużej półosi orbity, określająca jej rozmiary oraz będąca w ścisłym związku z okresem obiegu satelity wokół ciała centralnego; b długość małej półosi orbity; i inklinacja orbity będąca kątem nachylenia płaszczyzny orbity do płaszczyzny ekliptyki; Ω długość węzła wstępującego orbity odpowiadająca długości ekliptycznej punktu przecięcia orbity z płaszczyzną równika; ω argument perygeum będący kątem zawartym pomiędzy promieniem wodzącym satelity w perygeum a linią węzłów, liczony od węzła wstępującego w kierunku ruchu satelity; T p moment przejścia satelity przez perygeum (punkt orbity najbardziej zbliżony do środka Ziemi); e mimośród orbity będący miarą określającą kształt orbity; E anomalia ekscentryczna będąca kątem mierzonym w płaszczyźnie orbity pomiędzy osią x a prostą łączącą środek elipsy z punktem, który jest miejscem geometrycznego przecięcia prostej prostopadłej do osi x przechodzącej przez pozycję satelity z orbitą kołową opisaną na orbicie eliptycznej; ν anomalia prawdziwa będąca kątem mierzonym w płaszczyźnie orbity pomiędzy osią x i prostą łączącą ognisko elipsy, w którym znajduje się Ziemia, z aktualną pozycją satelity; M anomalia średnia będąca fikcyjną wartością kątową, którą można wyobrazić sobie jako anomalię prawdziwą hipotetycznej orbity kołowej opisanej na orbicie rzeczywistej. Wyszczególnione powyżej dane prezentowane są w zbiorach almanac wraz z przypisanym im momentem czasu GPS (ang.: Global Positioning System) i zostały przedstawione na rys Rys Elementy orbity satelity [27] 12
; e mimośród orbity będący miarą określającą kształt orbity; E anomalia ekscentryczna będąca kątem mierzonym w płaszczyźnie orbity pomiędzy osią x a")
13 2.2. Dane almanac Przeznaczenie danych almanac Głównym problemem eksploatacyjnym odbiorników systemów GNSS jest ich zdolność do szybkiej akwizycji sygnałów w terenie ograniczonym znaczną liczbą przesłon terenowych. Jest ona realizowana przede wszystkim poprzez nowoczesne rozwiązania elektroniczne modułów odbiorników wykorzystujące m.in. protokół binarny SIRF (ang.: SIRF Binary Protocol) [25], zapewniający blisko 100% dostępność nawet w tak trudnym obszarze. Zasadniczym czynnikiem decydującym o szybkim uzyskaniu przez odbiorniki synchronizacji z sygnałami satelitarnymi jest ich zdolność do rozpoczęcia śledzenia przez tory odbiorcze. Jest ona możliwa pod warunkiem posiadania w pamięci urządzenia pliku określanego mianem almanac, stanowiącego podzbiór danych systemu GPS, opisujących stan zegara systemowego i danych efemerydalnych satelitów prezentowanych z ograniczonym poziomem precyzji. Należy w tym miejscu podkreślić, iż dane zawarte w plikach almanac nie mają za zadanie wyznaczać położenia satelitów GPS na moment pomiaru pseudoodległości. Do tego celu przeznaczone są dane efemerydalne, których precyzja (liczba wartości po przecinku) jest znacząco większa. Dane almanac są niezbędne do przybliżonego wyznaczenia położenia satelity na orbicie, określając czy możliwy jest odbiór jego sygnałów dla lokalizacji odbiornika. Główna stacja kontrolna systemu GPS (MCS ang.: Master Control Station) realizując proces kompleksowej kontroli i sterowania pracą, wyznacza wszystkie dane niezbędne do wykorzystania przez użytkowników obu serwisów: ogólnego dostępu SPS (ang.: Standard Positioning Service) i precyzyjnego PPS (ang.: Precise Positioning Service). Na bieżąco wyznaczane są dane almanac w dwóch formatach SEM (ang.: System Effectiveness Model) i YUMA, status systemu dotyczący przeciwdziałania zakłóceniom celowym A-S Status (ang.: Anti-Spoofing Status), informacje nawigacyjne do użytkowników NANU (ang.: Notice Advisory to Navstar Users), informujące o aktualnym stanie pracy poszczególnych podsystemów GPS oraz pliki zawierające informacje o statusie segmentu kosmicznego OA (ang.: Operational Advisory). System GPS został stworzony przez Departament Obrony USA (U.S. DoD ang.: United States Department of Defense) do celów militarnych, w związku z czym transfer informacji do użytkowników cywilnych realizowany jest odmiennym kanałem, poprzez Centrum Nawigacyjne Straży Granicznej USA (USCG NAVCEN ang.: United States Coast Guard Navigation Center). Schematy na rys. 2.3 i rys. 2.4 prezentują realizację dystrybucji informacji dotyczącej systemu GPS w obszarze cywilnym i wojskowym. 13
 [25], zapewniający blisko 100% dostępność nawet w tak trudnym obszarze.")

14 Rys Schemat dystrybucji danych z segmentu kontrolnego do Centrum Nawigacyjnego Straży Granicznej USA [14] SAFB Baza Sił Powietrznych USA Schriever VAFB Baza Sił Powietrznych USA Vandenberg MCS główna stacja kontrolna AMCS alternatywna główna stacja kontrolna NIPRNet sieć przesyłowa niezabezpieczonych protokołów internetowych SIPRNet sieć przesyłowa tajnych protokołów internetowych DHS USCG Departament Bezpieczeństwa Krajowego Straży Granicznej Stanów Zjednoczonych DOT FAA Departament Transportu Federalnej Administracji Lotnictwa Rys Schemat dystrybucji danych z segmentu kontrolnego do użytkowników [13] Generowanie informacji almanac GPS Podlegająca Departamentowi Bezpieczeństwa Krajowego Straż Graniczna Stanów Zjednoczonych (DHS USCG ang.: Department of Homeland Security United States Coast Guard) publikuje na stronie internetowej ( pliki zawierające informacje o statusie segmentu kosmicznego systemu GPS (OA) z rozszerzeniem *.oa1 (konstelacja, konserwacja wybranych satelitów, ich awarie, itp.), pliki almanac w formacie YUMA (rozszerzenie *.alm) i SEM (rozszerzenie *.al3) oraz wiadomości dla użytkowników systemu (NANU) w plikach z rozszerzeniem *.nnu. Wszystkie typy wiadomości są 14

15 archiwizowane i możliwe do odczytania w dowolnym edytorze tekstu (pliki *.txt). Struktura wszystkich formatów jest ściśle ustalona i nie zostanie zmieniona, choć po wprowadzeniu Operacyjnego Systemu Kontroli Następnej Generacji (OCX ang.: Next Generation Operational Control System) należy się spodziewać nowych formatów danych. Zestawienie przesyłanych danych przez stację kontrolną zaprezentowano w tabeli 2.1 i tabeli 2.2. Tabela 2.1. Tablica wymiany informacji przed wprowadzeniem GPS OCX [14] Producent GPS CS Odbiorca Oprogramowanie stacji kontrolnej Przekazywane informacje Parametry konstelacji Opis informacji GPS CS USCG NAVCEN Status systemu NANU GPS CS GPS CS GPS CS GPS CS GPS CS USCG NAVCEN USCG NAVCEN Użytkownicy wojskowi Użytkownicy wojskowi Użytkownicy wojskowi Podsumowanie stanu konstelacji Parametry konstelacji Status systemu Podsumowanie stanu konstelacji Parametry konstelacji Sposób przekazywania danych Bezpieczeństwo Almanac Dyskietka Niesklasyfikowane OA Almanac NANU OA Almanac Tabela 2.2. Tablica wymiany informacji po wprowadzeniu GPS OCX [13] Poczta elektroniczna Strona internetowa Strona internetowa Strona internetowa i strony sieci SIPRNet Strona internetowa i strony sieci SIPRNet Strona internetowa i strony sieci SIPRNet Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Producent GPS CS GPS CS GPS CS GPS CS GPS CS GPS CS Odbiorca DHS USCG / DOT FAA / inni użytkownicy cywilni* DHS USCG / DOT FAA / inni użytkownicy cywilni DHS USCG / DOT FAA / inni użytkownicy cywilni DHS USCG / DOT FAA / inni użytkownicy cywilni Użytkownicy wojskowi Użytkownicy wojskowi Przekazywane informacje Status systemu Podsumowanie stanu konstelacji Status A-S Parametry konstelacji i stan pracy satelitów Status systemu Podsumowanie stanu konstelacji Opis informacji NANU OA Status A-S Almanac NANU OA Sposób przekazywania danych Poczta elektroniczna i strona internetowa Strona internetowa Strona internetowa Strona internetowa Strona internetowa i strony sieci SIPRNet Strona internetowa i strony sieci SIPRNet Bezpieczeństwo Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane Niesklasyfikowane 15

16 Producent GPS CS GPS CS * Odbiorca Użytkownicy wojskowi Użytkownicy wojskowi Przekazywane informacje Status A-S Parametry konstelacji i stan pracy satelitów Opis informacji Status A-S Almanac Sposób przekazywania danych Strona internetowa i strony sieci SIPRNet Strona internetowa i strony sieci SIPRNet Bezpieczeństwo Niesklasyfikowane Niesklasyfikowane Dane NANU są również automatycznie wysyłane do wybranych użytkowników 2. Dywizjonu Operacji Kosmicznych (2 SOPS ang.: 2d Space Operations Squadron) przez pocztę elektroniczną. Dane zawarte w plikach almanac mogą być z powodzeniem wykorzystywane przez okres około 60 dni [6], jednak nie można przewidzieć nagłej awarii konkretnego satelity, stąd standardy SEM i YUMA muszą zawierać informacje dotyczące aktualnego stanu pracy wszystkich satelitów. Dopuszcza się trzy stany pracy: aktywny, niewłaściwy oraz nieaktywny (ang.: active, bad, dead), które definiowane są przez główną stację kontrolną systemu. W przyszłości przewiduje się możliwość zdefiniowania dodatkowych stanów, które określono terminem inny (ang.: other). W dokumentach ICD-GPS-870 i ICD-GPS-240 [13, 14] oraz tabeli 2.3 przedstawiono interpretację sześciobitowego słowa określającego stan pracy satelity stosowanego w depeszy nawigacyjnej GPS oraz jego dziesiętną reprezentację wykorzystywaną w plikach almanac SEM oraz YUMA. Tabela 2.3. Interpretacja sześciobitowego słowa określającego stan pracy satelity stosowanego w depeszy nawigacyjnej GPS oraz jego dziesiętna reprezentacja wykorzystywana w plikach almanac SEM oraz YUMA [13] Stan pracy satelity Sześciobitowe słowo określające stan pracy satelity stosowane w depeszy nawigacyjnej GPS Aktywny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Dziesiętna reprezentacja sześciobitowego słowa określającego stan pracy satelity stosowana w plikach almanac SEM oraz YUMA 16

17 Stan pracy satelity Sześciobitowe słowo określające stan pracy satelity stosowane w depeszy nawigacyjnej GPS Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Inny Niewłaściwy Inny Inny Nieaktywny Format SEM Dziesiętna reprezentacja sześciobitowego słowa określającego stan pracy satelity stosowana w plikach almanac SEM oraz YUMA SEM jest to format plików almanac. W jego wstępie znajduje się nagłówek identyfikujący liczbę rekordów (satelitów), dla których przedstawiono dane oraz nazwa pliku (CURRENT.AL3). Należy zauważyć, że przygotowano również drugą wersję pliku w tym standardzie z rozszerzeniem *.bl3, która różni się jedynie możliwą maksymalną liczbą satelitów, do których się odnosi (*.al3 1-32, *.bl3 1-63). Przykładowy plik almanac formatu SEM przedstawiono na rys. 2.5, a jego opis w tabeli

18 Rys Przykładowy plik almanac formatu SEM (oznaczenia w czerwonych prostokątach nie są częścią formatu SEM, lecz zostały umieszczone w celu identyfikacji danych i ich opisu w tabeli 2.4) [13, 14] Tabela 2.4. Opis formatu SEM plików almanac [13, 14] Linia Parametr Opis Jednostka Zakres Dokładność Precyzja Liczba satelitów do Liczba 2 cyfry której Rekord Od 0 do 32 1 rekordów znaczące odniesiono 1 dane 2 Nazwa pliku Numer tygodnia GPS Czas GPS Opisowa nazwa pliku almanac Numer tygodnia GPS do którego odniesione są dane almanac Liczba sekund od początku tygodnia GPS, do której odniesiono dane almanac (t oa) 3 Pusta linia dla rozdzielenia danych Numer Numer PRN R-1 identyfikacyjny satelity satelity GPS R-2 R-3 R-4 Numer SVN satelity Numer średniej wartości URA Mimośród orbity Numer referencyjny, unikalny dla każdego satelity GPS Numer odnoszący się do średniej wartości URA transmitowanej przez satelitę Miara określająca kształt orbity (e) Nie dotyczy Dowolna kombinacja znaków ASCII Tygodnie Od 0 do Sekunda Od 0 do Brak Od 1 do 32 Brak Brak Od 0 do 255 Brak Brak Od 0 do 15 1 Bezwym. Nie dotyczy 24 znaki znaczące 4 cyfry znaczące 6 cyfr znaczących 2 cyfry znaczące 3 cyfry znaczące 2 cyfry znaczące Od 0 do 7 cyfr 2 4, , znaczących 18
 3 Pusta linia dla rozdzielenia danych Numer Numer PRN R-1 identyfikacyjny satelity satelity GPS R-2 R-3 R-4 Numer SVN satelity Numer średniej wartości URA")
19 Linia Parametr Opis Jednostka Zakres Dokładność Precyzja Offset inklinacji orbity (δi) b Offset niezawierający Od 6, cyfr inklinacji wartości Semicircles 2 1, do +6,25 10 znaczących orbity referencyjnej (i 0) 0,30 półokręgu c R-5 d e R-6 f g Zmiana rektascensji w funkcji czasu Pierwiastek kwadratowy dużej półosi elipsy Długość węzła wstępującego orbity Argument perygeum Anomalia średnia Korekta zegara zerowego rzędu Korekta zegara pierwszego rzędu R-7 Stan satelity R-8 Konfiguracja satelity Tempo zmian w pomiarze kąta rektascensji (Ω d) Pomiar wykonywany z centrum orbity do punktu apogeum lub perygeum (a 1/2 ) Długość węzła wstępującego orbity na określoną epokę (Ω 0) Kąt od równika do perygeum (ω) Kąt opisujący pozycję satelity na orbicie względem perygeum (M 0) Określenie korekty zegara zerowego rzędu dla pliku almanac (a f0) Określenie korekty zegara pierwszego rzędu dla pliku almanac (a f1) Sześciobitowy kod opisujący stan satelity Czterobitowy kod opisujący konfigurację satelity R-9 Pusta linia dla rozdzielenia danych Format YUMA Semicircles /sekundę Od 1, cyfr -7 3, do +1, znaczących Metry 1/2 4 9 cyfr Od 0 do ,88 10 znaczących 7 9 cyfr Semicircles Od 1,0 do +1,0 1,19 10 znaczących 7 9 cyfr Semicircles Od 1,0 do +1,0 1,19 10 znaczących 7 9 cyfr Semicircles Od 1,0 do +1,0 1,19 10 znaczących Sekunda Sekunda/ sekundę Od 9, cyfr -4 9, do +9, znaczących Od 3, cyfr -9 3, do +3, znaczących Brak Od 0 do 63 Brak Brak Od 0 do 15 Brak 2 cyfry znaczące 2 cyfry znaczące Format YUMA jest bardziej czytelny od formatu SEM. Każda linia zawiera opis przedstawionej informacji w języku angielskim. Obecnie pliki zawierające parametry ruchu satelitów w tym formacie posiadają rozszerzenie *.alm. Nowe rozszerzenie *.blm będzie, podobnie jak w formacie SEM, różnić się jedynie maksymalną liczbą satelitów do których będzie mogło się odnosić (*.alm 1-32, *.blm 1-63). Parametry używane w formacie YUMA nie są takie same jak w formacie SEM. Wartości kątowe są podawane w radianach (w formacie SEM 19
 Długość węzła wstępującego orbity na określoną epokę (Ω 0) Kąt od równika do perygeum (ω) Kąt opisujący pozycję satelity na orbicie względem perygeum (M 0)")
20 półokrąg), natomiast inklinacja bezpośrednio, a nie za pomocą offsetu. Nazwa tego formatu pochodzi prawdopodobnie od jednego z największych na świecie poligonów wojskowych znajdującego się w Arizonie Yuma Proving Ground, gdzie w marcu 1977 r. testowano naziemne nadajniki systemu GPS w fazie walidacji [23]. Przykładowe dane almanac w formacie YUMA przedstawiono na rys Rys Przykładowe dane almanac w formacie YUMA [13, 14] 20

21 3. WYZNACZANIE WSPÓŁCZYNNIKÓW GEOMETRYCZNYCH DOP NA MOMENT OBSERWACJI 3.1. Współczynniki geometryczne DOP i ich minimalizacja Współczynniki geometryczne DOP są miarą warunków geometrycznych określania pozycji. Jest to wartość skalarna informująca o przestrzennym rozmieszczeniu satelitów, których sygnał wykorzystywany jest do pozycjonowania, względem obserwatora. Wartości DOP mogą być wyrażane w różny sposób w zależności od wpływu pozycji satelitów na poszczególne komponenty pozycji odbiornika [27]: GDOP (ang.: Geometric Dilution of Precision) współczynnik geometryczny odnoszący się do czterech zmiennych opisujących wyznaczoną z systemu GPS pozycję (trzech współrzędnych i czasu), charakteryzujący przestrzeń 4D; PDOP (ang.: Position Dilution of Precision) przestrzenny współczynnik geometryczny odnoszący się do pozycji trójwymiarowej (3D), będący w zainteresowaniu przede wszystkim nawigacji lotniczej, kosmicznej, lądowej oraz geodezji; HDOP (ang.: Horizontal Dilution of Precision) horyzontalny współczynnik geometryczny odnoszący się do pozycji dwuwymiarowej (2D), istotny w nawigacji morskiej ze względu na brak konieczności szacowania wysokości; VDOP (ang.: Vertical Dilution of Precision) wertykalny współczynnik geometryczny odnoszący się do dokładności pomiaru wysokości, jednowymiarowej linii pozycyjnej (1D), istotny w procesie nawigacji lotniczej i kosmicznej; TDOP (ang.: Time Dilution of Precision) czasowy współczynnik geometryczny odnoszący się do pomiaru czasu. Im wartość współczynników geometrycznych jest mniejsza, tym błąd pozycji również jest mniejszy. W związku z tym, można zauważyć, iż dla tego samego momentu pomiaru błąd pozycji 3D jest większy lub co najwyżej równy błędowi pozycji 2D. Może on przyjmować tę samą wartość jedynie w przypadku bezbłędnego pomiaru wysokości. Zagadnienie minimalizacji DOP z punktu widzenia znaczenia dla pomiarów GPS jest kluczowym problemem, umożliwiającym otrzymanie współrzędnych pozycji z wysoką dokładnością, dlatego jest ono bardzo istotne między innymi w geodezji i hydrografii, w przypadku gdy występują przeszkody terenowe uniemożliwiające obserwację całego widnokręgu. Wymagane jest wtedy wstępne planowanie kampanii pomiarowej, które oparte jest o dane almanac. Wartości współczynników geometrycznych są odwrotnie proporcjonalne do pola powierzchni figury płaskiej przy obserwacji 2D lub objętości bryły przy obserwacji 3D, która powstaje dzięki połączeniu odcinkami współrzędnych położenia satelitów na epokę pomiarową. Faktem jest również to, że wartości wszystkich współczynników DOP maleją w funkcji wzrostu liczby satelitów. Przykłady optymalnego rozmieszczenia satelitów w stosunku do obserwatora 21
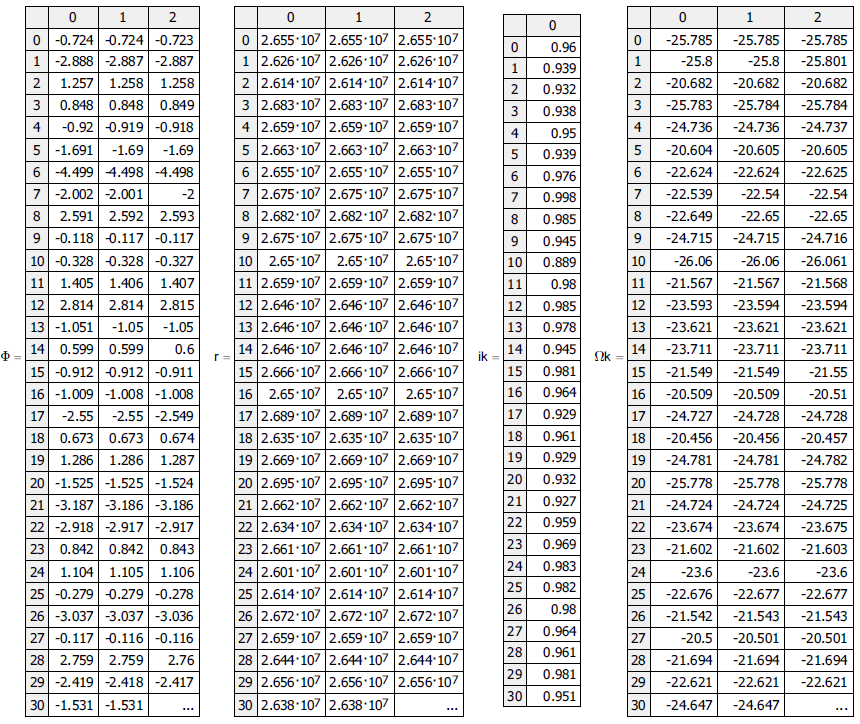
22 minimalizujące współczynniki geometryczne dla pozycji 2D przedstawiono na rys. 3.1, a dla pozycji 3D na rys Rys Przykłady optymalnego rozmieszczenia satelitów w stosunku do obserwatora, które minimalizuje współczynniki DOP dla pozycji 2D [27] Rys Przykłady optymalnego rozmieszczenia satelitów w stosunku do obserwatora, które minimalizuje współczynniki DOP dla pozycji 3D [27] Należy również wspomnieć, iż nie należy wykorzystywać satelitów o zerowej wysokości topocentrycznej, mimo że powoduje to zmniejszenie wartości współczynników geometrycznych. Ze względu na występowanie efektu troposferycznego rekomendowanym jest, aby odbiorniki wykorzystywały do określania współrzędnych sygnały tych satelitów, których wysokości topocentryczne są większe niż 10 dla nawigacji oraz 15 dla geodezji Model matematyczny wyznaczania wartości współczynników geometrycznych z wykorzystaniem danych pochodzących z plików almanac Proces obliczania wartości współczynników geometrycznych dla dowolnego momentu obserwacji należy rozpocząć od wyznaczenia współrzędnych satelitów GPS oraz odbiornika w układzie ECEF (ang.: Earth-Centered, Earth-Fixed) na właściwy moment czasu, zakładając, że ruch satelitów opisują prawa Keplera i bazując na geodezyjnym układzie odniesienia WGS-84 (ang.: World Geodetic System 84) [15]. W tym celu z plików almanac należy pozyskać następujące dane dla każdego satelity: t oa czas GPS, w którym został wygenerowany plik almanac [s]; 22
23 e mimośród orbity [ ]; δi offset inklinacji orbity [semicircles], [rad], [ ]; Ω d zmiana rektascensji w funkcji czasu [semicircles/s], [rad/s], [ /s]; a 1/2 pierwiastek kwadratowy dużej półosi orbity [m 1/2 ]; Ω 0 długość węzła wstępującego orbity w momencie generacji pliku almanac [semicircles], [rad], [ ]; ω argument perygeum [semicircles], [rad], [ ]; M 0 anomalia średnia w momencie generacji pliku almanac [semicircles], [rad], [ ]. Należy zwrócić szczególną uwagę na jednostki w jakich przedstawione zostały dane almanac, szczególnie na jednostkę [semicircles], którą należy zamienić na radiany (1 semicircle = π rad). Pozostałe dane potrzebne do obliczeń to: μ = 3, m 3 /s 2 parametr grawitacyjny; Ω e = 7, rad/s szybkość obrotu Ziemi; i 0 = 54 wartość referencyjna inklinacji orbity; a e = m długość dużej półosi elipsoidy WGS-84; b e = , m długość małej półosi elipsoidy WGS-84. Wyznaczanie współrzędnych satelitów GPS w układzie ECEF należy rozpocząć od obliczenia długości dużej półosi orbity [m]: a, a 2 (3.1) początkowej wartości ruchu średniego satelity [rad/s]: n μ, a 0 3 czasu jaki upłynął od momentu, w którym zostały wygenerowane dane almanac [s]: gdzie: t t toa dla t toa tk t toa dla t toa , t toa dla t toa czas GPS dla którego wyznacza się współczynniki geometryczne [s], oraz anomalii średniej odniesionej do momentu obserwacji [rad]: Mk M. 0 n0 tk Wartość anomalii ekscentrycznej [rad] znajduje się rozwiązując iteracyjnie równanie: Następnie należy wyznaczyć anomalię prawdziwą [rad]: (3.2) (3.3) (3.4) E M e sin E. (3.5) k argument szerokości [rad]: ν arctg 2 1 e sin E cos E e, (3.6) Φ ν ω, (3.7) 23
24 promień orbity [m]:, r a 1 e cos E (3.8) inklinację orbity [rad]: i i δi, długość węzła wstępującego orbity odniesioną do momentu obserwacji [rad]: współrzędne satelity w płaszczyźnie orbity [m]: 0, Ω Ω Ω Ω t Ω t k 0 d e k e oa xk yk r cos Φ, r sin Φ (3.9) (3.10) (3.11) (3.12) i ostatecznie współrzędne satelity w układzie ECEF [m]:, x x cos Ω y cos i sin Ω s k k k k, y x sin Ω y cos i cos Ω s k k k k z y sin i. s k (3.13) (3.14) (3.15) Po obliczeniu współrzędnych dla wszystkich satelitów GPS, kolejnym krokiem jest zamiana współrzędnych geodezyjnych B [rad], L [rad], h [m] punktu dla którego oblicza się współczynniki geometryczne na współrzędne ECEF. W tym celu należy wyznaczyć mimośród elipsoidy [ ]: e a b 2 2 e e e 2 ae promień krzywizny przekroju południkowego elipsoidy [m]: N a e 1 e sin B 2 2 e, (3.16) (3.17) i ostatecznie współrzędne punktu, dla którego oblicza się współczynniki geometryczne w układzie ECEF [m]: u, x N h cos B cos L u, (3.18) y N h cos B sin L (3.19) u. z N 1 e h sin B 2 e (3.20) Kolejnym krokiem jest transformacja współrzędnych satelitów z układu ECEF do ENU (ang.: East, North, Up), wyznaczenie ich wysokości topocentrycznych oraz pominięcie satelitów z ujemną jej wartością, bądź z mniejszą niż zadana, a dla pozostałych wyznaczenie azymutów mierzonych z pozycji odbiornika [10]. Macierz transformacji pomiędzy układami ECEF i ENU [ ] w postaci: sin L sin B cos L cos B cos L F cos L sin B sin L cos B sin L (3.21) 0 cos B sin B 24
25 umożliwia określenie współrzędnych satelity w układzie ENU [m]: xenu xs xu T y ENU ys y F u, z ENU zs z u a na ich podstawie wysokości topocentrycznej satelity [rad]: oraz jej azymutu [rad]: Az el arctg x z ENU y 2 2 ENU ENU 0 dla x 0 y 0 x ENU ENU ENU arctg dla xenu 0 yenu 0 y ENU 0,5 π dla x 0 y 0 y ENU ENU ENU 0,5 π arctg dla xenu 0 yenu 0 x ENU π dla x 0 y 0 x ENU ENU ENU π arctg dla xenu 0 yenu 0 y ENU 1,5 π dla x 0 y 0 ENU ENU y ENU 1, 5 π arctg dla xenu 0 yenu 0 x ENU Następnie, wykorzystując macierz gradientów linii pozycyjnych [ ]: cos el sin Az cos el cos Az sin el 1 cos el2 sin Az2 cos el2 cos Az2 sin el2 1 G, cos eln sin Azn cos eln cos Azn sin eln 1 gdzie: n liczba satelitów z wysokością topocentryczną większą niż zadana [ ], oraz macierz kowariancji [ ]:. (3.22) (3.23) (3.24) (3.25) wyznacza się współczynniki geometryczne [ ]: T 1, C G G (3.26) GDOP C, 0,0 C1,1 C2,2 C 3,3 (3.27) PDOP C0,0 C1,1 C2,2, (3.28) HDOP C C 0,0 1,1, (3.29) VDOP C, 2,2 (3.30) TDOP C. 3,3 (3.31) 25
26 4. BADANIE DOKŁADNOŚCI SYSTEMU GPS W FUNKCJI DOP I INNYCH ZMIENNYCH 4.1. Dokładność określania współrzędnych pozycji Na dokładność określania współrzędnych pozycji w systemie GPS wpływ mają błędy pomiarowe, które można podzielić na trzy zasadnicze grupy. Pierwszą z nich są błędy spowodowane propagacją sygnału, do których zalicza się błędy wynikające z opóźnienia jonosferycznego i troposferycznego oraz błędy spowodowane wielodrożnością odbieranego sygnału. W dalszej części niniejszej pracy zostaną one pominięte. Do drugiej grupy sklasyfikowano błędy wynikające z działania segmentów kosmicznego i naziemnego, a więc błędy efemeryd satelitów, błędy zegarów satelitów oraz błędy wynikające z geometrii konstelacji reprezentowane przez współczynniki DOP. Trzecią grupę stanowią błędy instrumentalne odbiorników, które współcześnie w małej mierze decydują o dokładności określania pozycji [17]. Błędy przynależące do drugiej grupy mogą być oszacowane i podawane w depeszy nawigacyjnej w postaci dokładności pomiaru odległości przez użytkownika URA (ang.: User Range Accuracy) [2]. Zgodnie ze standardem IS-GPS-200 z 2013 r. [6] wartość URA jest odchyleniem standardowym błędu pomiaru odległości URE (ang.: User Range Error). Na URE składają się błędy zegarów satelitów oraz błędy ich efemeryd [34]. Segment kontrolny śledzi pozycję każdego satelity, określając wektor błędów jego położenia i stanu zegara w stosunku do utrzymywanego przez Obserwatorium Astronomiczne Marynarki Wojennej Stanów Zjednoczonych (USNO ang.: United States Naval Observatory) wzorca czasu UTC (ang.: Coordinated Universal Time) [22]. Federalna Administracja Lotnictwa (FAA ang.: Federal Aviation Administration) kwartalnie publikuje dane dotyczące bieżącej wartości URA dla systemu GPS [12]. Wartość odchylenia standardowego rms (ang.: root mean square) wielkości URE można obliczyć w funkcji błędów określenia położenia satelity względem trajektorii wzdłużnej, poprzecznej i promienia wodzącego oraz błędu zegara satelity jako [11]:, URE 0,98 R T 0,141 A C (4.1) gdzie: URE błąd pomiaru odległości użytkownika [m], R błąd położenia satelity mierzony wzdłuż promienia jego orbity (ang.: Radial) [m], A błąd położenia satelity mierzony wzdłuż jego trajektorii (ang.: Alongtrack) [m], C błąd położenia satelity mierzony prostopadle do jego trajektorii (ang.: Crosstrack) [m], T błąd zegara satelity (ang.: Clock) [m]. Typowe wartości składowych błędów dla poszczególnych bloków satelitów zostały przedstawione w tabeli 4.1. Dane te zostały przeanalizowane dla 2010 r., w którym segment liczył łącznie 31 satelitów, w tym 30 operacyjnych. Segment kosmiczny tworzyły w tym momencie satelity trzech bloków IIA, IIR i IIR-M, odpowiednio w liczbie: 11, 12 i 8 [16]. 26
27 Tabela 4.1. Typowe wartości składowe błędu URE w funkcji bloku satelitów GPS [11] Składowa błędu blok IIA blok IIR blok IIR-M R promieniowa [m] 0,243 0,130 0,145 A wzdłużna [m] 1,258 0,921 1,000 C poprzeczna [m] 0,675 0,575 0,594 T czasowa [m] 1,074 0,384 0,498 URE [m] 1,076 0,418 0,527 Dokładność określania pozycji dla systemu GPS jest uzależniona od wartości wybranego współczynnika geometrycznego DOP oraz ekwiwalentnego błędu pomiaru odległości użytkownika UERE (ang.: User Equivalent Range Error), na który składają się błędy zarówno URE, jak i błąd odbiornika użytkownika UEE (ang.: User Equipment Error). Wartość UEE dla odbiorników z lat 80 ubiegłego wieku wynosiła typowo 5,5 m (p = 0,95), natomiast współcześnie wynosi 1,6 m (p = 0,95) [8]. W związku z powyższym wzór na dokładność określania pozycji można przedstawić w postaci następującej zależności [9]: 2 2 drms UERE DOP URE UEE DOP, gdzie: drms błąd średni pozycji (horyzontalny, wertykalny, przestrzenny, czasu), w zależności od wybranego współczynnika DOP (ang.: distance root mean square) [m], UERE ekwiwalentny błąd pomiaru odległości użytkownika [m], URE błąd pomiaru odległości użytkownika [m], UEE błąd odbiornika użytkownika [m], DOP odpowiedni współczynnik geometryczny położenia satelitów względem odbiornika: GDOP, PDOP, HDOP, VDOP, TDOP [ ]. Powyższe równanie na dokładność określania współrzędnych pozycji dla systemu GPS ma postać uproszczoną, przez co jest wystarczające i uniwersalne dla wielu zastosowań. Jest ono prawidłowe, gdy wszystkie błędy pomiaru pseudoodległości podlegają rozkładowi normalnemu (rozkład Gaussa). (4.2) 4.2. Badania symulacyjne W celu określenia rzeczywistej liczby satelitów w systemie GPS w latach dokonano analizy wszystkich plików almanac w rozważanym okresie czasu (łącznie przeanalizowano 4188 plików ze strony internetowej USCG NAVCEN) i na ich podstawie sporządzono wykres liczby satelitów (aktywnych i nieaktywnych) konstelacji GPS w funkcji poszczególnych lat oraz przedstawiono go na rys
28 liczba satelitów rok Rys Liczba dostępnych satelitów (aktywnych i nieaktywnych) systemu GPS na podstawie danych pochodzących z plików almanac z lat Dla oceny wpływu zmiany liczby satelitów na dokładność określenia pozycji opracowano w programie Mathcad algorytm pozwalający na wyznaczenie współczynników geometrycznych dla dowolnej lokalizacji i czasu. Analizy miały na celu określenie średniej dobowej wartości współczynników DOP w poszczególnych latach. Z każdego kolejnego roku, po wyłączeniu 2 maja 2000 r. przez prezydenta USA Billa Clintona techniki kryptograficznej zwanej selektywną dostępnością SA (ang.: Selective Availability) dla użytkowników cywilnych [31], wybrano plik almanac reprezentujący najczęściej występującą w danym roku liczbę satelitów GPS, dla którego w dalszej kolejności analizowano zmiany wartości DOP w ciągu pełnej doby gwiazdowej (odpowiadającej dwukrotnemu okrążeniu przez konstelację GPS kuli ziemskiej). Tabela 4.2. Reprezentatywna liczba satelitów w latach Rok Liczba satelitów Obliczenia wykonano dla lokalizacji Gdynia (54 32 N, E), minimalnej wysokości topocentrycznej satelitów równej 0 i okresu 23h 56 4, czyli czasu po jakim geometria konstelacji GPS nad danym punktem będzie identyczna jak w chwili rozpoczęcia obserwacji. W celu uzyskania równych przedziałów przeprowadzanych analiz jako krok realizacji obliczeń przyjęto wartość 4 sekund. Tak krótki przedział analiz pozwolił na uwzględnienie zmian wartości współczynników geometrycznych, które nie są brane pod uwagę przez ogólnodostępne programy stosowane w geodezji i nawigacji do analiz geometrii konstelacji, których typowym krokiem obliczeń jest 10 minut. Na rys przedstawiono wykresy współczynników HDOP i PDOP oraz ich wartości średnie dla rozpatrywanych przedziałów czasu. 28
29 Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2001 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2002 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2003 r. 29
30 Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2004 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2005 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2006 r. 30
31 Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2007 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2008 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2009 r. 31
32 Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2010 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2011 r. Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2012 r. 32
33 Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2013 r. Następnie dla zadanego okresu czasu (doba gwiazdowa) wyznaczono wartości średnie współczynników geometrycznych HDOP i PDOP, ich odchylenia standardowe ze wzoru: gdzie: σ odchylenie standardowe [ ], σ X i kolejna obserwacja w populacji [ ], Xsr średnia z populacji [ ], n liczba obserwacji w populacji, n i1 X oraz podwójne błędy średnie pozycji 2drms 2D i 3D w funkcji zmiennej wartości URE, przy UEE i X wynoszącym 0,8 m (rms), a wyniki przedstawiono na rys i rys n sr 2, (4.3) URE, HDOP, σhdop, 2drms 2D 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5 0, URE [m] 1,6 1,4 1,2 1,2 1,1 1,1 1,0 1,0 0,9 0,9 0,9 0,8 0,8 σhdop 0,33 0,38 0,40 0,32 0,15 0,16 0,24 0,39 0,18 0,23 0,25 0,18 0,17 HDOP [-] 0,96 1,00 1,05 0,92 0,85 0,87 0,91 0,92 0,89 0,85 0,86 0,81 0,82 2drms 2D [m] 3,45 3,22 3,01 2,66 2,31 2,37 2,34 2,35 2,15 2,05 2,08 1,84 1,85 Rys Wartość podwójnego błędu średniego pozycji 2drms 2D dla systemu GPS zależna od URE z lat (wartość URE określono na podstawie [1]) rok 33
 W celu oszacowania wpływu zmieniającej się liczby satelitów")
34 2drms 3D, 2drms 2D URE, PDOP, σpdop, 2drms 3D Rys Wartość podwójnego błędu średniego pozycji 2drms 3D dla systemu GPS zależna od URE z lat (wartość URE określono na podstawie [1]) W celu oszacowania wpływu zmieniającej się liczby satelitów GPS na dokładność określenia współrzędnych pozycji odniesionej do aktualnie obowiązującej wartości URE zaproponowano przyjęcie względnej zmiany procentowej dokładności określenia pozycji 2D i 3D w latach i przedstawiono ją na rys wykorzystując zależność: gdzie: 7,0 6,5 6,0 5,5 5,0 4,5 4,0 3,5 3,0 2,5 2,0 1,5 1,0 0,5 0, URE [m] 1,6 1,4 1,2 1,2 1,1 1,1 1,0 1,0 0,9 0,9 0,9 0,8 0,8 σpdop 0,56 0,69 0,88 0,57 0,25 0,34 0,45 0,67 0,44 0,34 0,50 0,27 0,30 PDOP [-] 1,68 1,74 1,87 1,60 1,46 1,53 1,59 1,60 1,57 1,47 1,51 1,39 1,42 2drms 3D [m] 6,02 5,61 5,40 4,60 3,97 4,17 4,08 4,09 3,77 3,54 3,65 3,14 3,21 2drmsn 2drms2001 Δ2drms 100%, 2drms Δ2drms względna zmiana dokładności określenia pozycji [%], 2drms podwójny błąd średni pozycji [m], n kolejne lata od 2001 do 2013 [ ] rok (4.4) 0,0-5,0-10,0-15,0-20,0-25,0-30,0-35,0-40,0-45,0-50, rok Δ2drms 3D [%] 0,0-6,8-10,4-23,6-34,1-30,7-32,3-32,0-37,3-41,2-39,5-47,9-46,8 Δ2drms 2D [%] 0,0-6,7-12,6-22,9-33,1-31,3-32,2-31,9-37,7-40,4-39,6-46,7-46,4 Rys Względna zmiana procentowa dokładności określenia pozycji 2D i 3D w latach
35 Przeprowadzone analizy dowodzą, że od momentu wyłączenia selektywnej dostępności system permanentnie poprawia dokładność określenia pozycji. Według standardu z 2001 r. [7] uśredniona globalnie dokładność określenia pozycji w płaszczyźnie horyzontalnej nie powinna przekraczać 13 m (p = 0,95), a w wertykalnej 22 m (p = 0,95), natomiast według wersji z 2008 r. [8] odpowiednio 9 m i 15 m. Oznacza to, że w płaszczyźnie horyzontalnej, obliczona w oparciu o powyższe standardy względna zmiana wartości 2drms wyniosła 30,8%. Zbliżony wynik otrzymano w prezentowanych analizach i wyniósł on 31,9%. Ponadto, na podstawie zaprezentowanych wyżej wykresów można wysnuć następujące wnioski: mimo iż w niektórych latach liczba satelitów jest taka sama, to współczynniki geometryczne nieznacznie się różnią, co spowodowane jest zmienną geometrią konstelacji satelitów GPS; zwiększenie liczby satelitów z 28 do 31 spowodowało zmniejszenie wartości współczynnika HDOP o 0,2, a PDOP o 0,4; zazwyczaj wzrost liczby satelitów powodował zmniejszenie współczynników geometrycznych HDOP i PDOP oraz ich odchylenia standardowego; w latach większy wpływ na dokładność wyznaczania pozycji miało zmniejszanie wartości błędu pomiaru odległości użytkownika niż zwiększenie liczby satelitów; podwójny błąd średni pozycji 2drms 3D jest średnio 1,7 razy większy niż 2D; w analizowanym okresie czasu podwójne błędy średnie pozycji 2drms 2D i 3D zmniejszyły się prawie o 50%. Należy jednak zwrócić uwagę na fakt, iż uzyskane wyniki bezwzględne badań symulacyjnych nie obejmują określonych już wcześniej błędów pomiarowych związanych z propagacją sygnału (opóźnienia jonosferycznego i troposferycznego), stąd różnią się od przytoczonych powyżej wartość pochodzących ze standardów. Wielkość tych błędów zależy w dużej mierze od rodzaju odbiornika wykorzystywanego do określenia pozycji, dlatego zostały celowo pominięte w analizach. 35
36 5. PODSUMOWANIE Planowanie pomiarów i ściśle związana z tym procesem minimalizacja współczynników geometrycznych DOP wymuszają ustalanie pozycji satelitów z wyprzedzeniem. Przybliżone współrzędne satelitów wyznaczane na podstawie danych almanac nie są tak dokładne jak efemerydy, pozwalają jednak na określenie ich pozycji z wystarczającą precyzją. Przedstawione parametry ruchu sztucznego satelity Ziemi dostępne w formatach SEM i YUMA różnią się od siebie sposobem zapisu i interpretacją właściwych wartości. Przypisanie znaczenia wartościom liczbowym w formacie SEM nie jest tak jednoznaczne jak dla formatu YUMA, co powoduje, że format SEM wymaga specjalistycznego oprogramowania umożliwiającego szybkie dekodowanie danych. Wartości w formacie SEM zapisywane są z większą dokładnością w porównaniu do formatu YUMA. Przeprowadzenie predykcji konstelacji, uzyskanie wartości liczbowych dla każdego formatu i porównanie wartości oczekiwanych z rzeczywistymi (uzyskanymi z obliczeń efemeryd) umożliwi ocenę formatu almanac oraz sprawdzenie czy sześćdziesięciodniowy okres braku aktualizacji znacząco wpływa na uzyskiwane parametry nawigacyjne. Współczynniki geometryczne DOP są miarą warunków geometrycznych określania pozycji, a zagadnienie ich minimalizacji jest kluczowym problemem umożliwiającym otrzymanie współrzędnych pozycji z wysoką dokładnością, szczególnie gdy występują przeszkody terenowe uniemożliwiające obserwację całego widnokręgu. Na szczęście ich wyznaczanie opiera się na relatywnie prostym modelu matematycznym. Oprócz współczynników DOP, głównym czynnikiem decydującym o dokładności określenia pozycji w systemie GPS jest wartość ekwiwalentnego błędu pomiaru odległości użytkownika UERE, na którą składa się wartość błędu odbiornika użytkownika UEE oraz wartość błędu pomiaru odległości użytkownika URE. Przeprowadzone badania symulacyjne w programie Mathcad dowodzą, iż system ten permanentnie poprawia dokładność określania pozycji. W latach podwójne błędy średnie pozycji 2drms 2D i 3D zmniejszyły się prawie o 50%, przy czym większy wpływ na tą zmianę miało zmniejszenie wartości URE niż zwiększenie liczby satelitów w konstelacji. Można także zauważyć, że w analizowanym okresie czasu, podwójny błąd średni pozycji 2drms 3D był średnio 1,7 razy większy niż 2D. W celu kontynuowania badań należałoby uwzględnić wpływ pozostałych błędów pomiarowych oraz systemów GNSS na dokładność określania pozycji. 36
37 WYKAZ LITERATURY 1. Bailey B. K.: GPS Modernization Activities and Program Plans, Proceedings of the Thirteenth Meeting of National Space-Based Positioning, Navigation and Timing Advisory Board, 3-4 June 2014, Washington, District of Columbia, United States of America. 2. Banachowicz A., Bober R., Szewczuk T., Wolski A.: Badanie wpływu geometrii systemu na dokładność określania pozycji za pomocą odbiornika GPS, Zeszyty Naukowe Akademii Marynarki Wojennej, Nr 4 (175), Gdynia 2008, s Czaplewski K.: Podstawy nawigacji morskiej i śródlądowej, Wydawnictwo Bernardinum, Pelplin Czaplewski K.: Positioning with Interactive Navigational Structures Implementation, Annual of Navigation, No. 7, Gdynia Gackowska A., Śniegocki H.: System AIS w rejonie Zatoki Pomorskiej, Materiały XIV Sympozjum Podstawowe problemy energoelektroniki, elektromechaniki i mechatroniki PPEEm, 9-12 grudnia 2011, Wisła, Polska, s Global Positioning System Directorate Systems Engineering & Integration Interface Specification: Navstar GPS Space Segment / Navigation User Interfaces, IS-GPS-200, Revision H, 24 September Global Positioning System Standard Positioning Service Performance Standard, 3 rd Edition, October Global Positioning System Standard Positioning Service Performance Standard, 4 th Edition, September Grall P., Specht C.: Ocena porównawcza standardów SPS systemu GPS w aspekcie dokładności określenia pozycji, Zeszyty Naukowe Akademii Marynarki Wojennej, Nr 3 (186), Gdynia 2011, s Grewal M. S., Weill L. R., Andrews A. P.: Global Positioning Systems, Inertial Navigation and Integration, John Wiley & Sons, Hoboken, New Jersey Heng L., Gao G. X., Walter T., Enge P.: Statistical Characterization of GPS Signal-In-Space Errors, Proceedings of the 2011 International Technical Meeting of The Institute of Navigation, January 2011, San Diego, California, United States of America, pp Hughes W. J. Technical Center NSTB/WAAS T&E Team Atlantic City International Airport: Global Positioning System (GPS) Standard Positioning Service (SPS) Performance Analysis Report, Federal Aviation Administration GPS Product Team, Report #86, 31 July 2014, Washington, District of Columbia, United States of America. 13. Interface Control Document: Navstar GPS Control Segment to User Support Community Interfaces, SAIC GPS SE&I, ICD-GPS-870, Revision A, 15 June 2011, El Segundo, California, United States of America. 14. Interface Control Document: Navstar GPS Control Segment to User Support Community Interfaces, SAIC GPSW SE&I, ICD-GPS-240, Revision A, 12 January 2010, El Segundo, California, United States of America. 15. Interface Control Document: Navstar GPS Space Segment / Navigation User Interfaces, ARINC Research Corporation, ICD-GPS-200, Revision C, 14 January 2003, El Segundo, California, United States of America. 16. Januszewski J.: Nawigacyjny system satelitarny GPS, dzisiaj i w przyszłości, Prace Wydziału Nawigacyjnego Akademii Morskiej w Gdyni, Nr 24, Gdynia 2010, s Januszewski J.: Systemy satelitarne GPS, Galileo i inne, Wydawnictwo Naukowe PWN, Warszawa Jaskólski K.: Availability of AIS Binary Data Transmission Based on Dynamic Measurements Performed on The Southern Baltic and The Danish Straits, Annual of Navigation, No. 20, Gdynia 2013, pp
38 19. Koc W., Specht C.: Application of the Polish Active GNSS Geodetic Network for Surveying and Design of the Railroad, Proceedings of the First International Conference on Road and Rail Infrastructure CETRA, May 2010, Opatija, Croatia, pp Koc W., Specht C.: Wyniki pomiarów satelitarnych toru kolejowego, TTS Technika Transportu Szynowego, Nr 7-8, Łódź 2009, s Koc W., Specht C., Nowak A., Szulwic J., Szmagliński J., Skóra M., Specht M., Czapnik M.: Dostępność fazowych rozwiązań GPS/GLONASS podczas geodezyjnej inwentaryzacji dróg szynowych na przykładzie linii tramwajowej Gdańska, TTS Technika Transportu Szynowego, Nr 9, Łódź 2012, s Marquis W.: Increased Navigation Performance from GPS Block IIR, Navigation, Journal of The Institute of Navigation, Vol. 50, No. 4, Chicago 2003, pp Navstar GPS User Equipment Introduction, September Oszczak B.: New Algorithm for GNSS Positioning Using System of Linear Equations, Proceedings of the 26 th International Technical Meeting of The Satellite Division of The Institute of Navigation ION GNSS+, September 2013, Nashville, Tennessee, United States of America, pp Oszczak B., Serżysko K., Tanajewski D.: Analiza protokołu SIRF Binary, Logistyka, Nr 6, Poznań 2011, s Oszczak B., Tanajewski D.: The Use of Geographical Information System at Local Airport Management, Proceedings of the 9 th International Conference Environmental Engineering, May 2014, Vilnius, Lithuania. 27. Specht C.: System GPS, Wydawnictwo Bernardinum, Pelplin Specht C., Skóra M.: Analiza porównawcza wybranych aktywnych sieci geodezyjnych, Zeszyty Naukowe Akademii Marynarki Wojennej, Nr 3 (178), Gdynia 2009, s Specht C., Szot T., Specht M.: Badanie dokładności personalnych odbiorników GPS w pomiarach dynamicznych, TTS Technika Transportu Szynowego, Nr 10, Łódź 2013, s Specht M., Szot T.: Accuracy Analysis of GPS Sport Receivers in Dynamic Measurements, Annual of Navigation, No. 19(1), Gdynia 2012, pp Statement by The President Regarding The United States Decision to Stop Degrading Global Positioning System Accuracy, Office of the Press Secretary, The White House, 1 May Śniegocki H.: Bezpieczeństwo tankowców LNG podczas podejścia do portu ze szczególnym uwzględnieniem zmian istniejącego oznakowania nawigacyjnego na przykładzie Portu Zewnętrznego i Terminala Gazowego LNG w Świnoujściu, Materiały XV Sympozjum Podstawowe problemy energoelektroniki, elektromechaniki i mechatroniki PPEEm, grudnia 2012,Gliwice, Polska. 33. Śniegocki H.: Wymogi organizacji międzynarodowych odnośnie do szerokości toru podejściowego dla największych gazowców LNG, Logistyka, Nr 6, Poznań 2011, s Wang Y., Li R.: The Analysis of Character of User Range Accuracy, Lecture Notes in Electrical Engineering, Vol. 244, Berlin 2013, pp Weintrit A.: Telematic Approach to e-navigation Architecture, Communications in Computer and Information Science, Vol. 104, Berlin 2010, pp
39 WYKAZ RYSUNKÓW Rys Uproszczony model ruchu sztucznego satelity Ziemi [27] Rys Elementy orbity satelity [27] Rys Schemat dystrybucji danych z segmentu kontrolnego do Centrum Nawigacyjnego Straży Granicznej USA [14] Rys Schemat dystrybucji danych z segmentu kontrolnego do użytkowników [13] Rys Przykładowy plik almanac formatu SEM (oznaczenia w czerwonych prostokątach nie są częścią formatu SEM, lecz zostały umieszczone w celu identyfikacji danych i ich opisu w tabeli 2.4) [13, 14] Rys Przykładowe dane almanac w formacie YUMA [13, 14] Rys Przykłady optymalnego rozmieszczenia satelitów w stosunku do obserwatora, które minimalizuje współczynniki DOP dla pozycji 2D [27] Rys Przykłady optymalnego rozmieszczenia satelitów w stosunku do obserwatora, które minimalizuje współczynniki DOP dla pozycji 3D [27] Rys Liczba dostępnych satelitów (aktywnych i nieaktywnych) systemu GPS na podstawie danych pochodzących z plików almanac z lat Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2001 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2002 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2003 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2004 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2005 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2006 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2007 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2008 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2009 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2010 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2011 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2012 r Rys Wykres współczynników HDOP i PDOP oraz ich wartości średnich dla wybranego pliku almanac z 2013 r Rys Wartość podwójnego błędu średniego pozycji 2drms 2D dla systemu GPS zależna od URE z lat (wartość URE określono na podstawie [1]) Rys Wartość podwójnego błędu średniego pozycji 2drms 3D dla systemu GPS zależna od URE z lat (wartość URE określono na podstawie [1])
40 Rys Względna zmiana procentowa dokładności określenia pozycji 2D i 3D w latach
41 WYKAZ TABEL Tabela 2.1. Tablica wymiany informacji przed wprowadzeniem GPS OCX [14] Tabela 2.2. Tablica wymiany informacji po wprowadzeniu GPS OCX [13] Tabela 2.3. Interpretacja sześciobitowego słowa określającego stan pracy satelity stosowanego w depeszy nawigacyjnej GPS oraz jego dziesiętna reprezentacja wykorzystywana w plikach almanac SEM oraz YUMA [13] Tabela 2.4. Opis formatu SEM plików almanac [13, 14] Tabela 4.1. Typowe wartości składowe błędu URE w funkcji bloku satelitów GPS [11] Tabela 4.2. Reprezentatywna liczba satelitów w latach
42 Dodatek A: Algorytm wykonany w programie Mathcad do wyznaczania współczynników geometrycznych DOP 42
43 43
44 44

45 45
ANALIZA PORÓWNAWCZA FORMATÓW DANYCH SATELITARNYCH (ALMANAC) W SYSTEMIE GPS
 W SYSTEMIE GPS") Cezary Specht Akademia Morska w Gdyni Marcin Skóra Akademia Marynarki Wojennej w Gdyni Mateusz Mania, Mariusz Specht Politechnika Gdańska ANALIZA PORÓWNAWCZA FORMATÓW DANYCH SATELITARNYCH (ALMANAC) W SYSTEMIE
Cezary Specht Akademia Morska w Gdyni Marcin Skóra Akademia Marynarki Wojennej w Gdyni Mateusz Mania, Mariusz Specht Politechnika Gdańska ANALIZA PORÓWNAWCZA FORMATÓW DANYCH SATELITARNYCH (ALMANAC) W SYSTEMIE
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Sztuczny satelita Ziemi. Ruch w polu grawitacyjnym
 Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
BADANIE WPŁ YWU GEOMETRII SYSTEMU NA DOKŁ ADNOŚĆ OKREŚ LANIA POZYCJI ZA POMOCĄ ODBIORNIKA GPS
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
Systemy odniesienia pozycji w odbiornikach nawigacyjnych. dr inż. Paweł Zalewski
 Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Systemy odniesienia pozycji w odbiornikach nawigacyjnych dr inż. Paweł Zalewski Wprowadzenie Terestryczne systemy odniesienia (terrestrial reference systems) lub systemy współrzędnych (coordinate systems)
Zarządzenie Rektora Politechniki Gdańskiej Nr 39/2018 z 20 grudnia 2018 r.
 Zarządzenie Rektora Politechniki Gdańskiej Nr 39/2018 z 20 grudnia 2018 r. w sprawie: wprowadzenia wzorów oświadczeń dotyczących prac i projektów dyplomowych na studiach wyższych na Politechnice Gdańskiej
Zarządzenie Rektora Politechniki Gdańskiej Nr 39/2018 z 20 grudnia 2018 r. w sprawie: wprowadzenia wzorów oświadczeń dotyczących prac i projektów dyplomowych na studiach wyższych na Politechnice Gdańskiej
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Satelity Ziemi. Ruch w polu grawitacyjnym. dr inż. Stefan Jankowski
 Satelity Ziemi Ruch w polu grawitacyjnym dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Satellites Satelity można podzielić na: naturalne (planety dla słońca/ gwiazd, księżyce dla planet) oraz sztuczne
Satelity Ziemi Ruch w polu grawitacyjnym dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Satellites Satelity można podzielić na: naturalne (planety dla słońca/ gwiazd, księżyce dla planet) oraz sztuczne
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego WYDZIAŁ INŻYNIERII LĄDOWEJ I GEODEZJI PRACA DYPLOMOWA
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego WYDZIAŁ INŻYNIERII LĄDOWEJ I GEODEZJI PRACA DYPLOMOWA TYTUŁ PRACY DYPLOMOWEJ PISANY WIELKIMI LITERAMI POGRUBIONĄ CZCIONKĄ Autor: Józef NOWAK Promotor
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego WYDZIAŁ INŻYNIERII LĄDOWEJ I GEODEZJI PRACA DYPLOMOWA TYTUŁ PRACY DYPLOMOWEJ PISANY WIELKIMI LITERAMI POGRUBIONĄ CZCIONKĄ Autor: Józef NOWAK Promotor
OCENA PORÓWNAWCZA STANDARDÓW SPS SYSTEMU GPS W ASPEKCIE DOKŁ ADNOŚ CI OKREŚ LENIA POZYCJI
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LII NR 3 (186) 2011 Piotr Grall Cezary Specht Akademia Marynarki Wojennej OCENA PORÓWNAWCZA STANDARDÓW SPS SYSTEMU GPS W ASPEKCIE DOKŁ ADNOŚ CI OKREŚ LENIA
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LII NR 3 (186) 2011 Piotr Grall Cezary Specht Akademia Marynarki Wojennej OCENA PORÓWNAWCZA STANDARDÓW SPS SYSTEMU GPS W ASPEKCIE DOKŁ ADNOŚ CI OKREŚ LENIA
Procedura sprawdzania za pomocą programu antyplagiatowego prac dyplomowych inżynierskich/magisterskich realizowanych na Wydziale Chemicznym PRz
 Załącznik do Uchwały RWCh Nr 13/2015 z dnia 8.04.2015 r. Procedura sprawdzania za pomocą programu antyplagiatowego prac dyplomowych inżynierskich/magisterskich realizowanych na Wydziale Chemicznym PRz
Załącznik do Uchwały RWCh Nr 13/2015 z dnia 8.04.2015 r. Procedura sprawdzania za pomocą programu antyplagiatowego prac dyplomowych inżynierskich/magisterskich realizowanych na Wydziale Chemicznym PRz
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Zarządzenie Rektora Politechniki Gdańskiej nr 1/2014 z 16 stycznia 2014 r.
 Zarządzenie Rektora Politechniki Gdańskiej w sprawie: wprowadzenia wzorów dokumentów dotyczących studiów podyplomowych na Politechnice Gdańskiej. Na podstawie art. 66 ust. 1 i 2 ustawy z dnia 27 lipca
Zarządzenie Rektora Politechniki Gdańskiej w sprawie: wprowadzenia wzorów dokumentów dotyczących studiów podyplomowych na Politechnice Gdańskiej. Na podstawie art. 66 ust. 1 i 2 ustawy z dnia 27 lipca
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego WYDZIAŁ LOGISTYKI PRACA DYPLOMOWA Temat pracy: Pisany wielkimi literami czcionka Arial (14 pkt.) (stopień wojskowy, tytuł zawodowy, imiona i nazwisko
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego WYDZIAŁ LOGISTYKI PRACA DYPLOMOWA Temat pracy: Pisany wielkimi literami czcionka Arial (14 pkt.) (stopień wojskowy, tytuł zawodowy, imiona i nazwisko
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
14 POLE GRAWITACYJNE. Włodzimierz Wolczyński. Wzór Newtona. G- stała grawitacji 6, Natężenie pola grawitacyjnego.
 Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
Dwa podstawowe układy współrzędnych: prostokątny i sferyczny
 Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Grawitacja - powtórka
 Grawitacja - powtórka 1. Oceń prawdziwość każdego zdania. Zaznacz, jeśli zdanie jest prawdziwe, lub, jeśli jest A. Jednorodne pole grawitacyjne istniejące w obszarze sali lekcyjnej jest wycinkiem centralnego
Grawitacja - powtórka 1. Oceń prawdziwość każdego zdania. Zaznacz, jeśli zdanie jest prawdziwe, lub, jeśli jest A. Jednorodne pole grawitacyjne istniejące w obszarze sali lekcyjnej jest wycinkiem centralnego
SPRAWDZIAN NR Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową.
 SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
SPRAWDZIAN NR 1 IMIĘ I NAZWISKO: KLASA: GRUPA A 1. Merkury krąży wokół Słońca po orbicie, którą możemy uznać za kołową. Zaznacz poprawne dokończenie zdania. Siłę powodującą ruch Merkurego wokół Słońca
PROCEDURA ANTYPLAGIATOWA PRAC DYPLOMOWYCH W POLITECHNICE ŁÓDZKIEJ
 Zarządzenie Nr 4/2015 Rektora Politechniki Łódzkiej z dnia 16 lipca 2015 r. w sprawie wprowadzenia Procedury antyplagiatowej prac dyplomowych Na podstawie art. 66 ust. 1 i ust. 2 ustawy z dnia 27 lipca
Zarządzenie Nr 4/2015 Rektora Politechniki Łódzkiej z dnia 16 lipca 2015 r. w sprawie wprowadzenia Procedury antyplagiatowej prac dyplomowych Na podstawie art. 66 ust. 1 i ust. 2 ustawy z dnia 27 lipca
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Wektory, układ współrzędnych
 Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Położenie satelity na podstawie wiadomości nawigacyjnej w formacie RINEX. dr hab. inż. Paweł Zalewski, prof. AM
 Położenie satelity na podstawie wiadomości nawigacyjnej w formacie RINEX dr hab. inż. Paweł Zalewsi, prof. AM 1. RINEX Położenie satelity - Zalewsi RINEX The Receiver Independent Exchange Format Version
Położenie satelity na podstawie wiadomości nawigacyjnej w formacie RINEX dr hab. inż. Paweł Zalewsi, prof. AM 1. RINEX Położenie satelity - Zalewsi RINEX The Receiver Independent Exchange Format Version
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Układ współrzędnych dwu trój Wykład 2 "Układ współrzędnych, system i układ odniesienia"
 Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
Układ współrzędnych Układ współrzędnych ustanawia uporządkowaną zależność (relację) między fizycznymi punktami w przestrzeni a liczbami rzeczywistymi, czyli współrzędnymi, Układy współrzędnych stosowane
3 Współrzędne satelity w płaszczyźnie orbity
 1 Wprowadzenie W geodezji satelitarnej funkcjonują dwa układy współrzędnych związane z ruchem obrotowym Ziemi Earth Centered Earth Fixed (ECEF), oraz układ ekwinokcjalny. Ze względu na prostą formę matematyczną
1 Wprowadzenie W geodezji satelitarnej funkcjonują dwa układy współrzędnych związane z ruchem obrotowym Ziemi Earth Centered Earth Fixed (ECEF), oraz układ ekwinokcjalny. Ze względu na prostą formę matematyczną
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
POSITION ACCURACY PROJECTING FOR TERRESTRIAL RANGING SYSTEMS
 XIII-th International Scientific and Technical Conference THE PART OF NAVIGATION IN SUPPORT OF HUMAN ACTIVITY ON THE SEA Naval University in Poland Institute of Navigation and Hydrography Cezary Specht,
XIII-th International Scientific and Technical Conference THE PART OF NAVIGATION IN SUPPORT OF HUMAN ACTIVITY ON THE SEA Naval University in Poland Institute of Navigation and Hydrography Cezary Specht,
Ruchy planet. Wykład 29 listopada 2005 roku
 Ruchy planet planety wewnętrzne: Merkury, Wenus planety zewnętrzne: Mars, Jowisz, Saturn, Uran, Neptun, Pluton Ruch planet wewnętrznych zachodzi w cyklu: koniunkcja dolna, elongacja wschodnia, koniunkcja
Ruchy planet planety wewnętrzne: Merkury, Wenus planety zewnętrzne: Mars, Jowisz, Saturn, Uran, Neptun, Pluton Ruch planet wewnętrznych zachodzi w cyklu: koniunkcja dolna, elongacja wschodnia, koniunkcja
Grawitacja i astronomia, zakres podstawowy test wiedzy i kompetencji ZADANIA ZAMKNIĘTE
 Grawitacja i astronomia, zakres podstawowy test wiedzy i kompetencji. Imię i nazwisko, klasa.. data Czas rozwiązywania testu: 40 minut. ZADANIA ZAMKNIĘTE W zadaniach od 1-4 wybierz i zapisz czytelnie jedną
Grawitacja i astronomia, zakres podstawowy test wiedzy i kompetencji. Imię i nazwisko, klasa.. data Czas rozwiązywania testu: 40 minut. ZADANIA ZAMKNIĘTE W zadaniach od 1-4 wybierz i zapisz czytelnie jedną
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Nawigacja: ocena dokładności pozycji. dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie
 Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
Nawigacja: ocena dokładności pozycji dr hab. inż. Paweł Zalewski, prof. AMS Akademia Morska w Szczecinie Literatura Ocena dokładności pozycji w nawigacji morskiej 1) Górski S., Jackowski K., Urbański J.:
Zarządzenie Rektora Politechniki Gdańskiej nr 17/2018 z 17 maja 2018 r.
 Zarządzenie Rektora Politechniki Gdańskiej nr 7/208 z 7 maja 208 r. w sprawie: wprowadzenia zmian we wzorach oświadczeń, stanowiących załączniki nr 2/ 2/6 do Zarządzenia Rektora Politechniki Gdańskiej
Zarządzenie Rektora Politechniki Gdańskiej nr 7/208 z 7 maja 208 r. w sprawie: wprowadzenia zmian we wzorach oświadczeń, stanowiących załączniki nr 2/ 2/6 do Zarządzenia Rektora Politechniki Gdańskiej
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA Kartoteka testu. Maksymalna liczba punktów. Nr zad. Matematyka dla klasy 3 poziom podstawowy
 Matematyka dla klasy poziom podstawowy LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA 06 Kartoteka testu Nr zad Wymaganie ogólne. II. Wykorzystanie i interpretowanie reprezentacji.. II. Wykorzystanie i interpretowanie
Matematyka dla klasy poziom podstawowy LUBELSKA PRÓBA PRZED MATURĄ 09 MARCA 06 Kartoteka testu Nr zad Wymaganie ogólne. II. Wykorzystanie i interpretowanie reprezentacji.. II. Wykorzystanie i interpretowanie
Obliczanie pozycji obiektu na podstawie znanych elementów orbity. Rysunek: Elementy orbity: rozmiar wielkiej półosi, mimośród, nachylenie
 Obliczanie pozycji obiektu na podstawie znanych elementów orbity Rysunek: Elementy orbity: rozmiar wielkiej półosi, mimośród, nachylenie a - wielka półoś orbity e - mimośród orbity i - nachylenie orbity
Obliczanie pozycji obiektu na podstawie znanych elementów orbity Rysunek: Elementy orbity: rozmiar wielkiej półosi, mimośród, nachylenie a - wielka półoś orbity e - mimośród orbity i - nachylenie orbity
Informatyka I Lab 06, r.a. 2011/2012 prow. Sławomir Czarnecki. Zadania na laboratorium nr. 6
 Informatyka I Lab 6, r.a. / prow. Sławomir Czarnecki Zadania na laboratorium nr. 6 Po utworzeniu nowego projektu, dołącz bibliotekę bibs.h.. Największy wspólny dzielnik liczb naturalnych a, b oznaczamy
Informatyka I Lab 6, r.a. / prow. Sławomir Czarnecki Zadania na laboratorium nr. 6 Po utworzeniu nowego projektu, dołącz bibliotekę bibs.h.. Największy wspólny dzielnik liczb naturalnych a, b oznaczamy
PW-Sat dwa lata na orbicie.
 13 lutego 2014 roku mijają dokładnie dwa lata od wystrzelenia pierwszego polskiego satelity studenckiego PW-Sata. Aktualnie na Politechnice Warszawskiej prowadzone są prace nad kolejnym satelitą PW-Satem
13 lutego 2014 roku mijają dokładnie dwa lata od wystrzelenia pierwszego polskiego satelity studenckiego PW-Sata. Aktualnie na Politechnice Warszawskiej prowadzone są prace nad kolejnym satelitą PW-Satem
Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..)
") Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..) 24.02.2014 Prawa Keplera Na podstawie obserwacji zgromadzonych przez Tycho Brahe (głównie obserwacji Marsa)
Wykład 2 - zagadnienie dwóch ciał (od praw Keplera do prawa powszechnego ciążenia i z powrotem..) 24.02.2014 Prawa Keplera Na podstawie obserwacji zgromadzonych przez Tycho Brahe (głównie obserwacji Marsa)
Wykład 2 Układ współrzędnych, system i układ odniesienia
 Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Wykład 2 Układ współrzędnych, system i układ odniesienia Prof. dr hab. Adam Łyszkowicz Katedra Geodezji Szczegółowej UWM w Olsztynie adaml@uwm.edu.pl Heweliusza 12, pokój 04 Spis treści Układ współrzędnych
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
SPIS TREŚCI WSTĘP... 8 1. LICZBY RZECZYWISTE 2. WYRAŻENIA ALGEBRAICZNE 3. RÓWNANIA I NIERÓWNOŚCI
 SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
SPIS TREŚCI WSTĘP.................................................................. 8 1. LICZBY RZECZYWISTE Teoria............................................................ 11 Rozgrzewka 1.....................................................
Projektowanie systemów pomiarowych. 02 Dokładność pomiarów
 Projektowanie systemów pomiarowych 02 Dokładność pomiarów 1 www.technidyneblog.com 2 Jak dokładnie wykonaliśmy pomiar? Czy duża / wysoka dokładność jest zawsze konieczna? www.sparkfun.com 3 Błąd pomiaru.
Projektowanie systemów pomiarowych 02 Dokładność pomiarów 1 www.technidyneblog.com 2 Jak dokładnie wykonaliśmy pomiar? Czy duża / wysoka dokładność jest zawsze konieczna? www.sparkfun.com 3 Błąd pomiaru.
Zarządzenie Nr 1/03/2019 Rektora Staropolskiej Szkoły Wyższej w Kielcach z dnia 10 marca 2019 r.
 Zarządzenie Nr 1/03/2019 Rektora Staropolskiej Szkoły Wyższej w Kielcach z dnia 10 marca 2019 r. w sprawie: procedury antyplagiatowej prac dyplomowych Na podstawie art. 23 ust. 1 oraz art. 76 ust. 4 Ustawy
Zarządzenie Nr 1/03/2019 Rektora Staropolskiej Szkoły Wyższej w Kielcach z dnia 10 marca 2019 r. w sprawie: procedury antyplagiatowej prac dyplomowych Na podstawie art. 23 ust. 1 oraz art. 76 ust. 4 Ustawy
Prawo powszechnego ciążenia, siła grawitacyjna, pole grawitacyjna
 Prawo powszechnego ciążenia, siła grawitacyjna, pole grawitacyjna G m m r F = r r F = F Schemat oddziaływania: m pole sił m Prawo powszechnego ciążenia, siła grawitacyjna, pole grawitacyjna Masa M jest
Prawo powszechnego ciążenia, siła grawitacyjna, pole grawitacyjna G m m r F = r r F = F Schemat oddziaływania: m pole sił m Prawo powszechnego ciążenia, siła grawitacyjna, pole grawitacyjna Masa M jest
Pozorne orbity planet Z notatek prof. Antoniego Opolskiego. Tomasz Mrozek Instytut Astronomiczny UWr Zakład Fizyki Słońca CBK PAN
 Pozorne orbity planet Z notatek prof. Antoniego Opolskiego Tomasz Mrozek Instytut Astronomiczny UWr Zakład Fizyki Słońca CBK PAN Początek Młody miłośnik astronomii patrzy w niebo Młody miłośnik astronomii
Pozorne orbity planet Z notatek prof. Antoniego Opolskiego Tomasz Mrozek Instytut Astronomiczny UWr Zakład Fizyki Słońca CBK PAN Początek Młody miłośnik astronomii patrzy w niebo Młody miłośnik astronomii
GRAWITACJA MODUŁ 6 SCENARIUSZ TEMATYCZNY LEKCJA NR 2 FIZYKA ZAKRES ROZSZERZONY WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA.
 MODUŁ 6 SCENARIUSZ TEMATYCZNY GRAWITACJA OPRACOWANE W RAMACH PROJEKTU: FIZYKA ZAKRES ROZSZERZONY WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA. PROGRAM NAUCZANIA FIZYKI Z ELEMENTAMI TECHNOLOGII
MODUŁ 6 SCENARIUSZ TEMATYCZNY GRAWITACJA OPRACOWANE W RAMACH PROJEKTU: FIZYKA ZAKRES ROZSZERZONY WIRTUALNE LABORATORIA FIZYCZNE NOWOCZESNĄ METODĄ NAUCZANIA. PROGRAM NAUCZANIA FIZYKI Z ELEMENTAMI TECHNOLOGII
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. Rysunek 1. Centrum monitoringu w Komendzie Miejskiej Policji w Gdańsku.
 System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
Sprawdzian Na rysunku przedstawiono siłę, którą kula o masie m przyciąga kulę o masie 2m.
 Imię i nazwisko Data Klasa Wersja A Sprawdzian 1. 1. Orbita każdej planety jest elipsą, a Słońce znajduje się w jednym z jej ognisk. Treść tego prawa podał a) Kopernik. b) Newton. c) Galileusz. d) Kepler..
Imię i nazwisko Data Klasa Wersja A Sprawdzian 1. 1. Orbita każdej planety jest elipsą, a Słońce znajduje się w jednym z jej ognisk. Treść tego prawa podał a) Kopernik. b) Newton. c) Galileusz. d) Kepler..
FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego)
") 2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
2019-09-01 FIZYKA klasa 1 Liceum Ogólnokształcącego (4 letniego) Treści z podstawy programowej przedmiotu POZIOM ROZSZERZONY (PR) SZKOŁY BENEDYKTA Podstawa programowa FIZYKA KLASA 1 LO (4-letnie po szkole
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki
 Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe
Akademia Górniczo-Hutnicza Wydział Elektrotechniki, Automatyki, Informatyki i Elektroniki Przetwarzanie Sygnałów Studia Podyplomowe, Automatyka i Robotyka. Wstęp teoretyczny Zmienne losowe Zmienne losowe
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Układy współrzędnych
 Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Układy współrzędnych Układ współrzędnych matematycznie - funkcja przypisująca każdemu punktowi danej przestrzeni skończony ciąg (krotkę) liczb rzeczywistych zwanych współrzędnymi punktu. Układ współrzędnych
Czy da się zastosować teorię względności do celów praktycznych?
 Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej
 Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Koncepcja pomiaru i wyrównania przestrzennych ciągów tachimetrycznych w zastosowaniach geodezji zintegrowanej Krzysztof Karsznia Leica Geosystems Polska XX Jesienna Szkoła Geodezji im Jacka Rejmana, Polanica
Podstawy fizyki sezon 1 VII. Pole grawitacyjne*
 Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne.
 PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
PRACA Praca. Siły zachowawcze i niezachowawcze. Pole Grawitacyjne. Rozważmy sytuację, gdy w krótkim czasie działająca siła spowodowała przemieszczenie ciała o bardzo małą wielkość Δs Wtedy praca wykonana
Ćwiczenie M-2 Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego Cel ćwiczenia: II. Przyrządy: III. Literatura: IV. Wstęp. l Rys.
 Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Ćwiczenie M- Pomiar przyśpieszenia ziemskiego za pomocą wahadła rewersyjnego. Cel ćwiczenia: pomiar przyśpieszenia ziemskiego przy pomocy wahadła fizycznego.. Przyrządy: wahadło rewersyjne, elektroniczny
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Astronomia. Znając przyspieszenie grawitacyjne planety (ciała), obliczyć możemy ciężar ciała drugiego.
, obliczyć możemy ciężar ciała drugiego.") Astronomia M = masa ciała G = stała grawitacji (6,67 10-11 [N m 2 /kg 2 ]) R, r = odległość dwóch ciał/promień Fg = ciężar ciała g = przyspieszenie grawitacyjne ( 9,8 m/s²) V I = pierwsza prędkość kosmiczna
Astronomia M = masa ciała G = stała grawitacji (6,67 10-11 [N m 2 /kg 2 ]) R, r = odległość dwóch ciał/promień Fg = ciężar ciała g = przyspieszenie grawitacyjne ( 9,8 m/s²) V I = pierwsza prędkość kosmiczna
Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy
 Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy 14. Kule (3 pkt) Dwie małe jednorodne kule A i B o jednakowych masach umieszczono w odległości 10 cm od siebie. Kule te oddziaływały wówczas
Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy 14. Kule (3 pkt) Dwie małe jednorodne kule A i B o jednakowych masach umieszczono w odległości 10 cm od siebie. Kule te oddziaływały wówczas
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
O 2 O 1. Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego
 msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
msg M 7-1 - Temat: Wyznaczenie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego Zagadnienia: prawa dynamiki Newtona, moment sił, moment bezwładności, dynamiczne równania ruchu wahadła fizycznego,
Aktualizacja, maj 2008 rok
 1 00015 Mechanika nieba C Dane osobowe właściciela arkusza 00015 Mechanika nieba C Arkusz I i II Czas pracy 120/150 minut Instrukcja dla zdającego 1. Proszę sprawdzić, czy arkusz egzaminacyjny zawiera
1 00015 Mechanika nieba C Dane osobowe właściciela arkusza 00015 Mechanika nieba C Arkusz I i II Czas pracy 120/150 minut Instrukcja dla zdającego 1. Proszę sprawdzić, czy arkusz egzaminacyjny zawiera
Rozkład materiału KLASA I
 I. Liczby (20 godz.) Rozkład materiału Wg podręczników serii Prosto do matury. Zakres podstawowy KLASA I 1. Zapis dziesiętny liczby rzeczywistej 1 1.1 2. Wzory skróconego mnoŝenia 3 2.1 3. Nierówności
I. Liczby (20 godz.) Rozkład materiału Wg podręczników serii Prosto do matury. Zakres podstawowy KLASA I 1. Zapis dziesiętny liczby rzeczywistej 1 1.1 2. Wzory skróconego mnoŝenia 3 2.1 3. Nierówności
Zarządzenie Rektora Politechniki Gdańskiej nr 1/2011 z 28 stycznia 2011 r.
 Zarządzenie Rektora Politechniki Gdańskiej nr 1/2011 z 28 stycznia 2011 r. w sprawie: wprowadzenia procedury dyplomowania Politechniki Gdańskiej. Na podstawie art. 66.2 ustawy prawo o szkolnictwie wyższym
Zarządzenie Rektora Politechniki Gdańskiej nr 1/2011 z 28 stycznia 2011 r. w sprawie: wprowadzenia procedury dyplomowania Politechniki Gdańskiej. Na podstawie art. 66.2 ustawy prawo o szkolnictwie wyższym
WPŁYW METODY DOPASOWANIA NA WYNIKI POMIARÓW PIÓRA ŁOPATKI INFLUENCE OF BEST-FIT METHOD ON RESULTS OF COORDINATE MEASUREMENTS OF TURBINE BLADE
 Dr hab. inż. Andrzej Kawalec, e-mail: ak@prz.edu.pl Dr inż. Marek Magdziak, e-mail: marekm@prz.edu.pl Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Katedra Technik Wytwarzania i Automatyzacji
Dr hab. inż. Andrzej Kawalec, e-mail: ak@prz.edu.pl Dr inż. Marek Magdziak, e-mail: marekm@prz.edu.pl Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Katedra Technik Wytwarzania i Automatyzacji
Źródła pozyskiwania danych grawimetrycznych do redukcji obserwacji geodezyjnych Tomasz Olszak Małgorzata Jackiewicz Stanisław Margański
 Źródła pozyskiwania danych grawimetrycznych do redukcji obserwacji geodezyjnych Tomasz Olszak Małgorzata Jackiewicz Stanisław Margański Wydział Geodezji i Kartografii Politechniki Warszawskiej Motywacja
Źródła pozyskiwania danych grawimetrycznych do redukcji obserwacji geodezyjnych Tomasz Olszak Małgorzata Jackiewicz Stanisław Margański Wydział Geodezji i Kartografii Politechniki Warszawskiej Motywacja
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Wyposażenie Samolotu
 P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
Skale czasu. dr inż. Stefan Jankowski
 Skale czasu dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Definition of Time Co mierzą zegary (przyp. fizykom Albert Einstein, Donald Ivey, and others) Coś co zapobiega aby wszystko nie działo się
Skale czasu dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Definition of Time Co mierzą zegary (przyp. fizykom Albert Einstein, Donald Ivey, and others) Coś co zapobiega aby wszystko nie działo się
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła rewersyjnego (Katera)
") Politechnika Łódzka FTIMS Kierunek: Informatyka rok akademicki: 2008/2009 sem. 2. grupa II Termin: 17 III 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła
Politechnika Łódzka FTIMS Kierunek: Informatyka rok akademicki: 2008/2009 sem. 2. grupa II Termin: 17 III 2009 Nr. ćwiczenia: 112 Temat ćwiczenia: Wyznaczanie przyspieszenia ziemskiego za pomocą wahadła
Ocena dokładności określenia pozycji systemów EGNOS i DGPS na podstawie wieloletnich pomiarów w latach 2006 2014
 Polski Przegląd Kartograficzny Tom 47, 015, nr, s. 17 136 MARIUSZ SPECHT Katedra Geodezji i Oceanografii Akademii Morskiej w Gdyni mariuszspecht199@gmail.com Ocena dokładności określenia pozycji systemów
Polski Przegląd Kartograficzny Tom 47, 015, nr, s. 17 136 MARIUSZ SPECHT Katedra Geodezji i Oceanografii Akademii Morskiej w Gdyni mariuszspecht199@gmail.com Ocena dokładności określenia pozycji systemów
Funkcja liniowa - podsumowanie
 Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
Funkcja liniowa - podsumowanie 1. Funkcja - wprowadzenie Założenie wyjściowe: Rozpatrywana będzie funkcja opisana w dwuwymiarowym układzie współrzędnych X. Oś X nazywana jest osią odciętych (oś zmiennych
GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący Google Maps i środowisko LabView
 Maciej Krzanowski, Mateusz Mrozowski, Mateusz Oszajca V rok Koło Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący
Maciej Krzanowski, Mateusz Mrozowski, Mateusz Oszajca V rok Koło Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący
Ćw. nr 31. Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2
 1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
1 z 6 Zespół Dydaktyki Fizyki ITiE Politechniki Koszalińskiej Ćw. nr 3 Wahadło fizyczne o regulowanej płaszczyźnie drgań - w.2 Cel ćwiczenia Pomiar okresu wahań wahadła z wykorzystaniem bramki optycznej
Obraz Ziemi widzianej z Księżyca
 Grawitacja Obraz Ziemi widzianej z Księżyca Prawo powszechnego ciążenia Dwa punkty materialne o masach m 1 i m przyciągają się wzajemnie siłą proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną
Grawitacja Obraz Ziemi widzianej z Księżyca Prawo powszechnego ciążenia Dwa punkty materialne o masach m 1 i m przyciągają się wzajemnie siłą proporcjonalną do iloczynu ich mas i odwrotnie proporcjonalną
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
DOKUMENTACJA DOTYCZĄCA PISANIA PRACY DYPLOMOWEJ/LICENCJACKIEJ
 Zał. II DOKUMENTACJA DOTYCZĄCA PISANIA PRACY DYPLOMOWEJ/LICENCJACKIEJ 1. Zgłoszenie pracy dyplomowej. 2. Karta opisu pracy. 3. Strona tytułowa pracy licencjackiej. 4. Oświadczenie (oświadczenie o samodzielności
Zał. II DOKUMENTACJA DOTYCZĄCA PISANIA PRACY DYPLOMOWEJ/LICENCJACKIEJ 1. Zgłoszenie pracy dyplomowej. 2. Karta opisu pracy. 3. Strona tytułowa pracy licencjackiej. 4. Oświadczenie (oświadczenie o samodzielności
Walidacja metod analitycznych Raport z walidacji
 Walidacja metod analitycznych Raport z walidacji Małgorzata Jakubowska Katedra Chemii Analitycznej WIMiC AGH Walidacja metod analitycznych (według ISO) to proces ustalania parametrów charakteryzujących
Walidacja metod analitycznych Raport z walidacji Małgorzata Jakubowska Katedra Chemii Analitycznej WIMiC AGH Walidacja metod analitycznych (według ISO) to proces ustalania parametrów charakteryzujących