Zarys technologii systemów nawigacji satelitarnej
|
|
|
- Marian Nawrocki
- 9 lat temu
- Przeglądów:
Transkrypt
1 Zarys technologii systemów nawigacji satelitarnej Stosowanie geoinformatyki w kontekście centralizacji SILP Szkolenie centralne z zakresu geomatyki leśnej dla nadleśniczych, 2011r. przygotował: Jacek Prengel - Zespół Zadaniowy ds. LMN 1

2 Systemy nawigacji satelitarnej Czym jest system nawigacji satelitarnej W jaki sposób wyznacza się pozycję Z czego się składa- przykładzie GPS Jak możemy zwiększyć dokładność wyznaczenia pozycji Jakie są alternatywy dla systemu GPS Jak możemy wykorzystywać GNSS w leśnictwie Sprzęt i oprogramowanie 2 GNSS = globalny nawigacyjny system satelitarny 2

3 Czym jest system nawigacji satelitarnej Jest to system nawigacyjny oparty o satelity poruszające się po ściśle wyznaczonych orbitach, umożliwiający wyznaczenie położenia punktu lub poruszających się obiektów w trzech wymiarach w dowolnej części Ziemi. 3 3

 do poszczególnych satelitów o ściśle określonych orbitach Odbywa się to poprzez wyznaczenie opóźnienia sygnału wysłanego przez satelitę do anteny")
4 W jaki sposób wyznacza się pozycję Istotą wyznaczenia pozycji z wykorzystaniem systemu nawigacji satelitarnej jest obliczenie tzw. pseudoodległości obserwatora (anteny odbiornika) do poszczególnych satelitów o ściśle określonych orbitach Odbywa się to poprzez wyznaczenie opóźnienia sygnału wysłanego przez satelitę do anteny odbiornika. 4 Obliczenie pseudo-odległości polega na pomiarze opóźnienia sygnału i pomnożeniu go przez prędkość rozchodzenia się fali elektromagnetycznej. Dokładność z jaką ją wyznaczymy będzie zależała od dokładności pomiaru opóźnienia. Każdy z satelitów wyposażony jest w dwa zegary atomowe, mierzące czas z dokładnością do nanosekund (1 ns = 10-9 s czas, w którym światło przebywa drogę 30 cm). Zegary wszystkich satelitów muszą być ze sobą zsynchronizowane. Zegar odbiornika GPS synchronizowany jest z czasem systemowym. 4

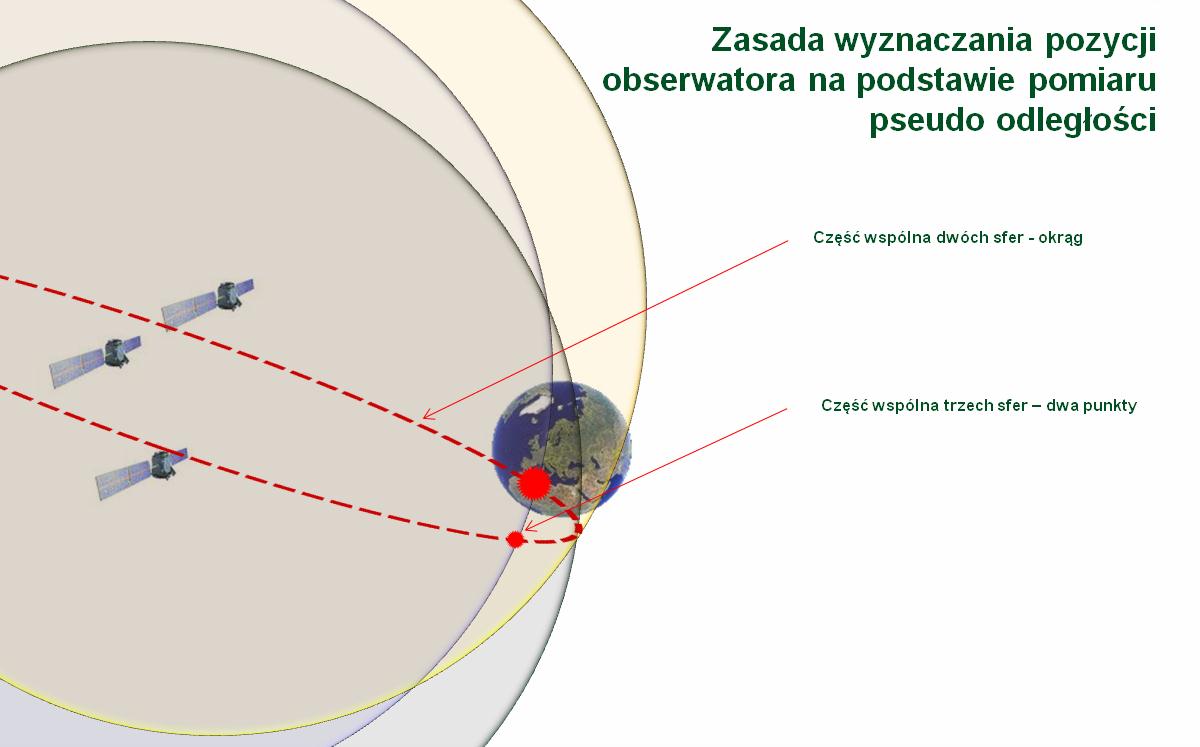
5 5
 w globalnym układzie odniesienia (WGS84).")
6 Budowa systemu nawigacji satelitarnej na przykładzie GPS (Global Positioning System)- Globalny System Pozycjonowania system satelitarny służący do szybkiego wyznaczenia pozycji obserwatora (anteny) w globalnym układzie odniesienia (WGS84). Stworzony i zarządzany przez Departament Obrony USA, udostępniany do zastosowań cywilnych. 6 6

7 Systemy nawigacji satelitarnej - GPS składa się z trzech modułów: segmentu kosmicznego satelitów okrążających Ziemię segmentu kontroli stacji kontrolujących i monitorujących segmentu użytkownika odbiorników GPS: wojsko oraz użytkownicy cywilni 7 7


8 Segment kosmiczny 27 satelitów (24 aktywne + 3 zapasowe) 6 orbit kołowych, po 4 satelity na orbicie Wysokość orbity km Kąt nachylenia orbity do płaszczyzny równika Czas obiegu- ok. 11godz. 57 min. Widoczność min. 5 satelitów usytułowanych ponad 5 0 nad horyzontem w dowolnym miejscu Ziemi z prawdopodobieństwem 0, System GPS jest ciągle modernizowany następuje wymiana satelitów. W związku z tym, że czas obiegu satelitów wokół Ziemi wynosi ok.11 godzin i 57 minut następnego dnia identyczna konstelacja (układ) satelitów powtarza się o ok. 6 minut wcześniej. Jest to informacja ułatwiająca planowanie sesji pomiarowych. 8


9 Budowa systemu nawigacji satelitarnej na podstawie GPS-symulacja widoczności satelitów 9 Slajd ilustruje symulację widoczności satelitów przez antenę odbiornika dla różnych położeń na kuli ziemskiej. 9

 i poprawki zegarów satelitów 10 Stacje monitorujące przesyłają informacje do stacji głównej, gdzie wyliczane są efemerydy (parametry")
10 Segment kontroli Główna Stacja Monitorująca Baza sił powietrznych Falkon w Colorado Springs Stacje monitorujące: Hawaje, Diego Garcia, Ascesion, Kwajalein Stacje monitorujące przesyłają informacje do stacji głównej, gdzie wyliczane są efemerydy (parametry orbit) i poprawki zegarów satelitów 10 Stacje monitorujące przesyłają informacje do stacji głównej, gdzie wyliczane są efemerydy (parametry orbit) i poprawki zegarów satelitów. Następnie korekty trafiają do satelitów (korygowane są orbity i ustawienia zegarów). Efemerydy - dokładne elementy orbitalne każdego satelity GPS nadającego depeszę nawigacyjną, składające się z 17 parametrów, konieczne do obliczenia pozycji satelitów w momencie obserwacji. / autor hasła: Krzysztof Okła / 10


11 Segment użytkownika Użytkownicy wojskowi i cywilni Nawigacja Pomiary Wyznaczanie pozycji Transfer czasu 11 Zastosowanie: Bezpieczeństwo Budownictwo przemysłowe Geodezja i geodynamika Komunikacja drogowa Nawigacja morska, śródlądowa i powietrzna Hydrografia i hydrologia Energetyka Obronność Ochrona środowiska Zarządzanie kryzysowe Ochrona zdrowia Rolnictwo i leśnictwo Sport i turystyka Systemy Informacji Przestrzennej Telekomunikacja 11

12 Sygnały emitowane przez satelity GPS mają postać fal nośnych (L 1, L 2 i L 5 ) kodowanych fazowo sygnałami: informacyjnym - depesza nawigacyjna pseudolosowym kodem C/A (akwizycja zgrubna) pseudolosowym kodem P (dokładnym) pseudolosowym kodem Y 12 Sygnały emitowane przez satelity GPS mają postać fal nośnych (L 1, L 2 i L 5 ) kodowanych fazowo sygnałami: - informacyjnym - depesza nawigacyjna zawierająca min. almanach i efemerydę, nakładana na kod C/A i P - pseudolosowym kodem C/A (akwizycja zgrubna), taktowanym częstotliwością 1,023 MHz, emitowany na częstotliwości nośnej L 1, każdy satelita ma swój własny kod C/A nazywany także kodem PRN, jest podstawowym kodem używanym przez odbiorców cywilnych - pseudolosowym kodem P (dokładnym), taktowanym częstotliwością 10,23 MHz, emitowany na częstotliwości nośnej L 1 i L 2 - pseudolosowym kodem Y, taktowanym częstotliwością około 0.5 Hz. uaktywnianym w chwili zagrożenia (szyfrującym kod P)- dostępny tylko dla autoryzowanych użytkowników (wojsko). 12
, taktowanym częstotliwością 1,023 MHz, emitowany na częstotliwości nośnej L 1, każdy satelita ma swój")
13 Podstawowe procesy wykonywane przez odbiornik GPS Odbiór i wzmocnienie sygnału odebranego od satelity Zmniejszenie częstotliwości i przetworzenie na postać cyfrową Identyfikacja satelitów na podstawie kodu C/A (PRN) Odczytanie danych zawartych w depeszy nawigacyjnej i wyznaczenie opóźnień sygnału od satelity do anteny 13 13

.")
14 Zasada pomiaru opóźnienia sygnału - wyznaczenie pseudoodległości Pomiar kodowy - Pomiar opóźnienia odbywa się poprzez skorelowanie kodu C/A nadawanego przez satelitę z wzorcem kodu satelity zapisanym i odtwarzanym w odbiorniku GPS. W depeszy nawigacyjnej zapisany jest czas wysłania sygnału 14 Każdy z satelitów generuje unikalny kod PRN (oznaczone nr od 1 do 32-numer satelity). Odbiornik GPS generuje repliki kodów odpowiadające poszczególnym satelitom i bada ich korelację z kodami odczytanymi przez antenę odbiornika. W zależności od zaawansowania technologicznego odbiornika może on śledzić (badać korelację sygnałów) jednocześnie wiele satelitów (np. 20). W przypadku stwierdzenia korelacji pomiędzy kodami z depeszy nawigacyjnej odczytywany jest czas wysłania sygnału i porównywany z czasem jego dotarcia do anteny wyznaczane jest opóźnienie sygnału. Znając czas jakim kod dotarł do odbiornika i prędkość rozchodzenia się fali elektromagnetycznej można wyliczyć pseudoodległość satelity od anteny odbiornika. Wyznaczona odległość określana jest mianem pseudo-odległości ponieważ zakłada się, że fala przebywa całą trasę ze stałą prędkością. W rzeczywistości fala pokonuje drogę ze zmienną prędkością ponieważ porusza się w różnych ośrodkach (próżnia, jonosfera, toposfera). Obliczenie pseudo-odległości od co najmniej 3 satelitów umożliwia wyznaczenie pozycji obserwatora. Czwarty satelita umożliwia obliczenie wysokości. 14
 jednocześnie wiele satelitów (np. 20).")

15 Zasada pomiaru opóźnienia sygnałuwyznaczenie pseudoodległości Pomiar fazowy - Odbiornik generuje sygnał identyczny z falą nośną satelitów i wykonuje pomiar przesunięcia fazowego tj. określa ile całkowitych oraz jaki ułamek długości fali nośnej mieści się ma drodze satelita obserwator. 15 Metoda bardzo dokładna (dokładności subcentymetrowe ok. 2 mm), wymagająca zaawansowanych technologicznie odbiorników i dłuższego czasu pomiaru. Mechanizm wyznaczania pseudo-odległości jest podobny do stosowanego w systemie kodowym (także bada się korelację sygnałów). Miarą pseudo-odległości jest liczba pełnych (wielokrotność) długości fali oraz jej faza (fragment długości fali). 15
.")
16 Chwile przełomowe w wykorzystaniu systemu GPS faza testu systemu GPS osiągnięcie pełnej zdolności operacyjnej 2000 zniesienie sygnału zakłócającego S.A. (zwiększenie dokładności odczytu pozycji) 16 Do maja 2000 roku sygnał GPS celowo był zakłócany sygnałem S.A. (Selective Availability) pogarszając dokładność wyznaczania pozycji. Z uwagi na to, że system GPS jest systemem wojskowym nie można wykluczyć, że w pewnych warunkach będzie podlegał zakłóceniom. 16
 pogarszając dokładność wyznaczania pozycji.")
 - 50% pozycji wyznaczanych dwuwymiarowo znajduje się wewnątrz okręgu o promieniu CEP np. CEP<15 m 50% pomiarów zawrze się w okręgu o promieniu 15 m.")
17 Poprawa spodziewanej dokładności wyznaczenia pozycji po wyłączeniu sygnału SA 17 Wykres ilustruje jak zmieniła się spodziewana dokładność wyznaczania pozycji po wyłączeniu S.A. (Selective Availability). CEP-(Circular Error Probable) - 50% pozycji wyznaczanych dwuwymiarowo znajduje się wewnątrz okręgu o promieniu CEP np. CEP<15 m 50% pomiarów zawrze się w okręgu o promieniu 15 m. SEP-(Spherical Error Probable) - 50% pozycji wyznaczanych trójwymiarowo znajduje się w sferze o promieniu SEP. 17

 o znanych, stałych współrzędnych.")
18 Zwiększenie dokładności wyznaczenia pozycji pomiar różnicowy 18 W przeciwieństwie do wyznaczeń absolutnych (bezwzględnych), w pomiarach różnicowych GNSS pozycja określana jest względem stacji referencyjnej (lub grupy stacji) o znanych, stałych współrzędnych. Bierzemy tu pod uwagę założenie, że wpływ czynników zewnętrznych na propagację sygnałów satelitarnych jest w przybliżeniu jednakowy lub liniowo zmienny na ograniczonym obszarze maksymalnie w promieniu kilkunastu do kilkudziesięciu kilometrów. Zatem znając precyzyjne współrzędne danego punktu i jednocześnie wykonując na nim obserwacje GNSS, możemy wyznaczyć poprawki do tych obserwacji (pomiary w czasie rzeczywistym). Poprawki transmitowane do odbiornika ruchomego (tzw. rovera) pozwalają na podniesienie dokładności wyznaczeń nawet do poziomu pojedynczych centymetrów. W przypadku pomiarów statycznych, opracowanych w tzw. post-processingu, zasada pomiarów różnicowych wykorzystywana jest przy wyznaczaniu wektorów pomiędzy antenami uczestniczącymi w tym pomiarze. Wektory te podlegają później procesowi wyrównania w celu wyznaczenia szukanych współrzędnych punktów. 18



19 Zwiększenie dokładności wyznaczenia pozycji - EGNOS System różnicowy korekcji pomiarów GPS Wersje regionalne systemu Spodziewany wzrost dokładności Satelity geostacjonarne systemu 19 W celu polepszenia dokładności systemu stworzono różnicowy system korekcji pomiarów GPS składający się naziemnych stacji referencyjnych, które przesyłają poprawki do trzech satelitów geostacjonarnych EGNOS. Za pośrednictwem tych satelitów, sygnał trafia do odbiorników GPS pozwalając na skorygowanie pomiaru dokonanego na podstawie danych z satelitów GPS. System występuje w trzech kompatybilnych ze sobą wersjach regionalnych : WAAS w Ameryce, EGNOS w Europie oraz japoński MSAS w Azji. EGNOS pozwala na zmniejszenie błędu pomiaru pozycji z ok.10 m do poniżej 3 metrów w odbiornikach przystosowanych do odbioru tego sygnału. Ze względu jednak na to, że satelita EGNOS umieszczony jest na orbicie geostacjonarnej ulokowanej nad równikiem, to na naszej szerokości geograficznej (kierunek południowy - ok. 22 nad horyzontem) dostępność jego sygnału jest ograniczana (dodatkowo również przez przeszkody terenowe). 19

20 Zwiększenie dokładności wyznaczenia pozycji pomiar różnicowy ASG EUPOS 20 Projekt wielofunkcyjnego systemu precyzyjnego pozycjonowania ASG- EUPOS został zrealizowany w Polsce przy wykorzystaniu środków Europejskiego Funduszu Rozwoju Regionalnego (EFRR) w ramach Sektorowego Programu Operacyjnego Wzrost Konkurencyjności Przedsiębiorstw (SPO-WKP), działanie 1.5 Rozwój systemu dostępu Przedsiębiorców do informacji i usług publicznych on-line. 20
, działanie 1.")
21 Zwiększenie dokładności wyznaczenia pozycji pomiar różnicowy ASG EUPOS 21 Jednym z trzech głównych segmentów systemu ASG-EUPOS jest segment odbiorczy. Jego rolą jest zbieranie danych obserwacyjnych do satelitów GNSS (globalny nawigacyjny system satelitarny) i przekazywanie ich w czasie rzeczywistym do Centrum Obliczeniowego. Składa się on z równomiernie rozłożonych na obszarze Polski i państw sąsiadujących stacji referencyjnych GNSS. Zgodnie ze standardem EUPOS przy budowie segmentu odbiorczego przyjęto następujące założenia: średnia odległość pomiędzy stacjami wynosi 70 km, do sieci stacji referencyjnych włączone zostały istniejące stacje EPN i IGS (stacje permanentne), współrzędne stacji wyznaczone są w systemie ETRS89 oraz w układach państwowych, w stacjach referencyjnych wykorzystano jedynie precyzyjne dwuczęstotliwościowe odbiorniki GNSS, miejsca zainstalowania stacji referencyjnych wybrano tak, aby zapewnić dogodne warunki obserwacji satelitów GNSS. Aktualnie segment ten składa się z następujących grup stacji referencyjnych: 81 stacje krajowe z modułem GPS, 18 stacji krajowych z modułem GPS/GLONASS, 22 stacje zagraniczne. Krajowe stacje referencyjne w większości zlokalizowane są na budynkach administracji publicznej szczebla wojewódzkiego i powiatowego, placówkach badawczych i budynkach oświaty. Mapa przedstawia rozmieszczenie stacji referencyjnych systemu ASG-EUPOS w Polsce z podziałem na ich funkcję oraz obserwowane systemy GNSS. 21
 satelitów rozmieszczonych na trzech orbitach kołowych o promieniu ok. 19100 km. Płaszczyzna orbit nachylona jest do płaszczyzny równika pod kątem 64,8 stopnia.")
22 Alternatywa dla GPS? - GLONASS Globalny System Nawigacyjny GLONASS- podobnie jak GPS z tą różnicą, że właścicielem systemu są siły zbrojne Rosji. Istnieją także różnice techniczne. System składa się z 24 (docelowo) satelitów rozmieszczonych na trzech orbitach kołowych o promieniu ok km. Płaszczyzna orbit nachylona jest do płaszczyzny równika pod kątem 64,8 stopnia. Czas obiegu satelity wokół Ziemi wynosi ok. 11 godzin i 15 minut. Glonass nie osiągnął pełnej sprawności z uwagi na nie skompletowaną konstelację satelitów. W chwili obecnej na orbitach jest 22 aktywnych satelitów. W sprzedaży są dostępne specjalizowane odbiorniki obsługujące jednocześnie system GPS i GLONASS
 2 centra kontrolne, zlokalizowane na terenie Europy (GALILEO Control Centers) Światowa sieć stacji Up-link transfer danych do i od satelitów Stacje")
23 Alternatywa dla GPS - GALILEO - cywilny system nawigacji satelitarnej, firmowany przez UE 2005 wystrzelono pierwszego satelitę 2008 planowane było uruchomienie systemu Docelowo segment globalny: 30 satelitów na trzech orbitach (w tym 3 zapasowe) 2 centra kontrolne, zlokalizowane na terenie Europy (GALILEO Control Centers) Światowa sieć stacji Up-link transfer danych do i od satelitów Stacje nadzoru rozmieszczone na całym globie, monitorują jakość sygnału 23 23

24 Optymalizacja czasu pomiaru Planowanie misji pomiarowej w celu wyboru optymalnej konstelacji satelitów. Wykorzystano program Planning 2.7 firmy Trimble. 24 Optymalizacja czasu pomiaru ma na celu wyznaczenie przedziałów czasu, w których wykonane pomiary będą mogły być najdokładniejsze. Największy wpływ na spodziewaną dokładność ma tzw. geometryczny rozkład satelitów. Jego miarą jest współczynnik DOP (ang. Dilution of Precision). Wyraża on stosunek objętości półkuli określonej przez orbity satelitarne i punkt, w którym znajduje się obserwator, do wielościanu opartego na aktualnie widocznych satelitach i obserwatorze. Wynika z tego, że współczynnik DOP 1. Przyjmuje się, że rozkład satelitów charakteryzowany poprzez DOP<1,3> jest bardzo dobry, przy DOP<3,6> jest on akceptowalny, natomiast przy DOP>6 nie powinno się wykonywać precyzyjnych pomiarów. W terminologii dotyczącej GNSS stosuje się często warianty cząstkowe współczynnika DOP, tj. GDOP (geometryczny), PDOP (pozycji), HDOP (pozycji poziomej), VDOP (pozycji pionowej), TDOP (czasu), charakteryzujące wpływ rozmieszczenia satelitów na jedną lub więcej wyznaczanych wielkości. Bardzo ważna jest tzw. widoczność satelitów. Minimalna liczba satelitów potrzebna do wyznaczenia pozycji wynosi 4. Należy jednak przyjąć, że antena odbiornika powinna widzieć więcej niż 5 satelitów. Programy do planowania czasu misji pomiarowych umożliwiają założenie tzw. maski horyzontu (kąta powyżej którego będziemy mięli możliwość obserwować satelity). Uwzględnienie tego parametru jest szczególnie istotne podczas planowania pomiarów w terenie o urozmaiconej rzeźbie np. w górach. Dla pomiarów w lesie powinno przyjmować się maskę horyzontu większą od 20 st. 24
 lub wykorzystywać witryny sieci web.")
25 Optymalizacja czasu pomiaru 25 Do planowania czasu misji pomiarowych można wykorzystywać oprogramowanie na komputery osobiste, pda (palmtopy) lub wykorzystywać witryny sieci web. 25
 spełnienie minimalnych założeń pomiarowych jest")
, gdzie na orbitach ciągle")
26 Optymalizacja czasu pomiaru 26 W przypadku systemów w pełni operacyjnych (GPS) spełnienie minimalnych założeń pomiarowych jest łatwiejsze. W przypadku systemów w budowie (GLONASS), gdzie na orbitach ciągle brakuje jeszcze satelitów mogą zdarzyć się obszary o gorszych parametrach. 26
27 Praktyczne wykorzystanie pomiarów GPS w leśnictwie pomiar obiektów poligonowych, liniowych i punktowych nie wymagających dużej precyzji wszystkie działy gospodarki leśnej min. ochrona lasu, hodowla, użytkowanie, selekcja i nasiennictwo, łowiectwo, ochrona p.poż. nawigowanie po trasie i na punkt wyznaczanie pozycji identyfikacja obiektów w terenie prace urządzeniowe i inwentaryzacyjne 27 27
 Specjalizowane jednoczęstotliwościowe odbiorniki GPS Odbiorniki dwuczęstotliwościowe Odbiorniki RTK Odbiorniki dwusystemowe (GPS + GLONASS) 28 28")
28 Z czego możemy korzystać sprzęt Proste odbiorniki jednoczęstotliwościowe (w formie kart rozszerzeń lub modułów komunikujących się bezprzewodowo do notebooków i palmtopów, odbiorniki zintegrowane) Specjalizowane jednoczęstotliwościowe odbiorniki GPS Odbiorniki dwuczęstotliwościowe Odbiorniki RTK Odbiorniki dwusystemowe (GPS + GLONASS) 28 28
29 Z czego możemy korzystać -oprogramowanie elas Mobile ArcPad 10 mlas Inżynier Farm Site Mate ArcGis 10 Oprogramowanie dedykowane i udostępniane przez producentów sprzętu: np. MobileMapper Office (Thales), Pathfinder Office (Trimble), GIS DataPRO (Leica) 29

30 Praktyczne zastosowanie GPS Pomiar wielkości i kształtu obiektów poligonowych na przykładzie gniazd w rębniach częściowych Margonin, luty

31 Praktyczne zastosowanie GPS Pomiar wielkości i kształtu obiektów poligonowych na przykładzie działek działek zrębowych 31
")
32 Praktyczne zastosowanie GPS Wyznaczanie współrzędnych obiektów i nawigowanie do nich na przykładzie drzew matecznych (doborowych) 32


33 Praktyczne zastosowanie GPS Identyfikacja obiektów oraz uzyskiwanie informacji z bazy opisowej na przykładzie programu mlas Inżynier 33 33
34 Podsumowanie Polepszenie dokładności pomiarów można osiągnąć poprzez stosowanie się do następujących zaleceń: W teren ruszamy po zaplanowaniu czasu misji pomiarowej Włączamy odbiornik w miarę możliwości w terenie otwartym (skróci to czas startu GPS-a) W miejscu pomiaru sprawdzamy jakość sygnału tzw. fix, który powinien być 3D oraz PDOP, który powinien być < 6 W odbiornikach obsługujących korekcję DGPS (np. Egnos) włączamy usługę może to polepszyć dokładność pomiaru W przypadku korzystania z oprogramowania pomiarowego umożliwiającego uśrednianie pomiarów oraz weryfikację parametrów opisujących jakość sygnału ustawiamy uśrednienie z co najmniej 30 epok i zapis pomiaru przy spełnieniu: PDOP<6, fix=3d Obiekty powierzchniowe i liniowe mierzymy wykonując pomiar ciągły z interwałem np. 2 sekundy umożliwi to późniejszą generalizację oraz eliminację błędów grubych spowodowanych np. chwilowym zaniku sygnału lub jego zniekształceniem 34 Idealnym rozwiązaniem było by korzystanie z odbiorników mogących korzystać z poprawek w trybie DGPS np. z sieci ASG-EUPOS. 34
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju
 Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
Wstępne wyniki opracowania kampanii GNSS Integracja stacji referencyjnych systemu ASG- EUPOS z podstawową osnową geodezyjną kraju Leszek Jaworski, Anna Świątek, Ryszard Zdunek, Janusz B. Zieliński Kampania
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Co to jest ten geocaching?
 Geocaching Co to jest ten geocaching? Geocaching jest to zabawa w poszukiwanie skarbów za pomocą odbiornika GPS. Ideą przewodnią jest znalezienie ukrytego wcześniej w terenie pojemnika (nazywanego "geocache")
Geocaching Co to jest ten geocaching? Geocaching jest to zabawa w poszukiwanie skarbów za pomocą odbiornika GPS. Ideą przewodnią jest znalezienie ukrytego wcześniej w terenie pojemnika (nazywanego "geocache")
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
SYSTEMY INFORMACJI PRZESTRZENNEJ
 SYSTEMY INFORMACJI PRZESTRZENNEJ 2014-2015 program rozszerzony dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki
SYSTEMY INFORMACJI PRZESTRZENNEJ 2014-2015 program rozszerzony dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
Kartografia - wykład
 Prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKA, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Global positioning system (GPS) i jego wykorzystanie w kartografii Systemy nawigacji
Prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKA, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Global positioning system (GPS) i jego wykorzystanie w kartografii Systemy nawigacji
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Czy da się zastosować teorię względności do celów praktycznych?
 Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów
 System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim
 Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
ASG-EUPOS serwisy postprocessingu
 Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Katedra Geodezji Satelitarnej i Nawigacji. Geodezja i geoinformatyka
 Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG. Acta Scientifica Academiae Ostroviensis nr 30, 69-75
 Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12
 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Przyswojenie wiedzy na temat serwisów systemu GPS i charakterystyk z nimi związanych
 C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR. Agrocom Polska Jerzy Koronczok
 Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR Agrocom Polska Jerzy Koronczok Poprawki korekcyjne dostępne w Polsce Odpowiednia dokładność
Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR Agrocom Polska Jerzy Koronczok Poprawki korekcyjne dostępne w Polsce Odpowiednia dokładność
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS. Acta Scientifica Academiae Ostroviensis nr 30, 19-32
 Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Nowoczesne zarządzanie, kontrola i monitoring w Krakowskim Pogotowiu Ratunkowym przy wykorzystaniu satelitarnej techniki GPS
 przy wykorzystaniu satelitarnej techniki GPS Maciej Antosiewicz Urszula Sanak Urząd Marszałkowski Województwa Małopolskiego Małgorzata Popławska Krakowskie Pogotowie Ratunkowe 1 Kraków, 22.05.2007 r. GPS
przy wykorzystaniu satelitarnej techniki GPS Maciej Antosiewicz Urszula Sanak Urząd Marszałkowski Województwa Małopolskiego Małgorzata Popławska Krakowskie Pogotowie Ratunkowe 1 Kraków, 22.05.2007 r. GPS
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Olsztyn, 10-11 października 2013 r.
Podstawy Geomatyki. Wykład III Systemy GNSS
 Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Serwisy postprocessingu POZGEO i POZGEO D
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy postprocessingu POZGEO i POZGEO D Marcin Ryczywolski specjalista Szkolenie Służby Geodezyjnej
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Katedra Geodezji Satelitarnej i Nawigacji
 Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
Globalny Nawigacyjny System Satelitarny GPS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 POZGEO-2 - moduł ultraszybkiego pozycjonowania w ramach projektu ASG+ P. Wielgosz,
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS
 II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
II Konferencja Użytkowników ASG-EUPOS Katowice 2012 SERWIS INTERAKTYWNEGO MONITOROWANIA WSPÓŁRZĘDNYCH STACJI SIECI ASG-EUPOS K. Szafranek, A. Araszkiewicz, J. Bogusz, M. Figurski Realizacja grantu badawczo-rozwojowego
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK
 Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Badania wpływu charakterystyki dokładnościowej korekt różnicowych na poprawne wyznaczenie nieoznaczoności w pozycjonowaniu GNSS-RTK Rozprawa doktorska Warszawa, 15 maja 214 r. Dominik Próchniewicz Politechnika
Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska
 UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
UNIWERSYTET WARMIŃSKO MAZURSKI w OLSZTYNIE Zastosowanie pomiarów GPS do wyznaczania deformacji terenu na obszarze Głównego i Starego Miasta Gdańska Radosław Baryła 1), Stanisław Oszczak 1), Paweł Wielgosz
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
Państwowe Szkoły Budownictwa i Geodezji im. H. Łopacińskiego
 Strona 1 z 6 Państwowe Szkoły Budownictwa i Geodezji im. H. Łopacińskiego ul. Aleje Racławickie 5, 20-059 Lublin email: przetargpsb@gmail.com www.psb.lublin.pl Lublin, dn. 19.11.2013 r. Wykonawcy ubiegający
Strona 1 z 6 Państwowe Szkoły Budownictwa i Geodezji im. H. Łopacińskiego ul. Aleje Racławickie 5, 20-059 Lublin email: przetargpsb@gmail.com www.psb.lublin.pl Lublin, dn. 19.11.2013 r. Wykonawcy ubiegający
Inwentaryzacja terenowa i inne zastosowania GPS w pożarnictwie. Jacek Mucha Specjalista GNSS/GIS
 Inwentaryzacja terenowa i inne zastosowania GPS w pożarnictwie Jacek Mucha Specjalista GNSS/GIS W programie: Aktualne zastosowania GPS Dlaczego inwentaryzacja jest ważna? Jak ją poprawnie wykonać? Grupa
Inwentaryzacja terenowa i inne zastosowania GPS w pożarnictwie Jacek Mucha Specjalista GNSS/GIS W programie: Aktualne zastosowania GPS Dlaczego inwentaryzacja jest ważna? Jak ją poprawnie wykonać? Grupa
Szkice polowe i dzienniki pomiarowe
 Szkice polowe i dzienniki pomiarowe Autor: Stefan Roszkowski, inspektor wojewódzki Wojewódzka Inspekcja Geodezyjna i Kartograficzna 29 ust. 4 rozporządzenia Ministra Spraw Wewnętrznych i Administracji
Szkice polowe i dzienniki pomiarowe Autor: Stefan Roszkowski, inspektor wojewódzki Wojewódzka Inspekcja Geodezyjna i Kartograficzna 29 ust. 4 rozporządzenia Ministra Spraw Wewnętrznych i Administracji
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
Odbiornik Trimble R10 GNSS. www.geotronics.com.pl
 Odbiornik Trimble R10 GNSS www.geotronics.com.pl Trimble R10 Produktywność ponad GNSS Trimble HD-GNSS Trimble SurePoint Trimble xfill Trimble 360 Ergonoiczny Design W połączeniu z oprogramowaniem Trimble
Odbiornik Trimble R10 GNSS www.geotronics.com.pl Trimble R10 Produktywność ponad GNSS Trimble HD-GNSS Trimble SurePoint Trimble xfill Trimble 360 Ergonoiczny Design W połączeniu z oprogramowaniem Trimble
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
ASG-EUPOS w pracach geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS w pracach geodezyjnych i kartograficznych Artur Oruba specjalista II Konferencja Użytkowników
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. Rysunek 1. Centrum monitoringu w Komendzie Miejskiej Policji w Gdańsku.
 System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
- nawigacja satelitarna w turystyce
 - nawigacja satelitarna w turystyce Ślesin 11 13 czerwca 2014 r. Czym jest GPSwielkopolska? projekt poświęcony wykorzystaniu technologii nawigacji satelitarnej w turystyce, rozwijany od 2007 r. przez Samorząd
- nawigacja satelitarna w turystyce Ślesin 11 13 czerwca 2014 r. Czym jest GPSwielkopolska? projekt poświęcony wykorzystaniu technologii nawigacji satelitarnej w turystyce, rozwijany od 2007 r. przez Samorząd
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS
 Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS STACJE REFERENCYJNE SYSTEMU ASG-EUPOS WSTĘP Istnienie nowoczesnych, wielofunkcyjnych systemów precyzyjnego pozycjonowania satelitarnego,
Wielofunkcyjny system precyzyjnego pozycjonowania satelitarnego ASG-EUPOS STACJE REFERENCYJNE SYSTEMU ASG-EUPOS WSTĘP Istnienie nowoczesnych, wielofunkcyjnych systemów precyzyjnego pozycjonowania satelitarnego,
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny) stacjonarne (stacjonarne / niestacjonarne)
 ogólnoakademicki (ogólno akademicki / praktyczny) stacjonarne (stacjonarne / niestacjonarne)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Techniki pomiarowe w geodezji Nazwa modułu w języku angielskim Measurement
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Techniki pomiarowe w geodezji Nazwa modułu w języku angielskim Measurement
Aktualne produkty jonosferyczne dla GNSS
 Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
Aktualne produkty jonosferyczne dla GNSS Anna Krypiak-Gregorczyk 1, Paweł Wielgosz 1 Andrzej Borkowski 2 Angela Aragon-Angel 3 Aleksander Nowak 4 1 Uniwersytet Warmińsko-Mazurski w Olsztynie 2 Uniwersytet
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Załącznik nr 7 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław Oszczak
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1
 w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu TopSURV dla odbiornika Topcon GRS-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie się systemu.