PODSTAWOWE DANE SYSTEMU GPS
|
|
|
- Seweryna Lewicka
- 10 lat temu
- Przeglądów:
Transkrypt

1 NAWIGACJA GNSS

2 NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny system nawigacji satelitarnej, ale i wszystkie inne systemy o charakterze globalnym funkcjonujące częściowo lub pozostające w planach realizacji (GLONASS, GALILEO) wraz ze wspomaganiem (ABAS, SBAS, GBAS), które jest wymagane do wykorzystania tego sensora w nawigacji w lotnictwie cywilnym. Omawiane zagadnienia: Podstawowe dane systemu GPS Podstawowa zasada funkcjonowania Źródła błędów systemu nawigacyjnego Dokładność systemu nawigacyjnego Wady i zalety GPS

3 PODSTAWOWE DANE SYSTEMU GPS System opracowany przez Departament Obrony USA Pierwotnie do wykorzystania wyłącznie przez wojsko Pierwszy satelita został wystrzelony na orbitę w 1978 roku Pełną funkcjonalność operacyjną system uzyskał w 1995 roku Konfiguracja segmentu satelitarnego: 24 satelity na 6 powierzchniach orbitalnych, po 4 satelity na każdej orbicie, każdy satelita wykonuje pełną orbitę w 12 godzin, Wysokość orbity km Inklinacja 55 - kąt nachylenia orbity w stosunku do płaszczyzny równikowej 3 satelity zapasowe Obecnie (2013) jest dostępnych 31 satelitów
 jest")
4 PODSTAWOWE DANE SYSTEMU GPS Oprócz segmentu satelitarnego (zespół satelitów) system GPS składa się również z segmentu naziemnego: - głównej stacji kontrolnej (Schriever USA), - Stacji monitorujących.
, -")
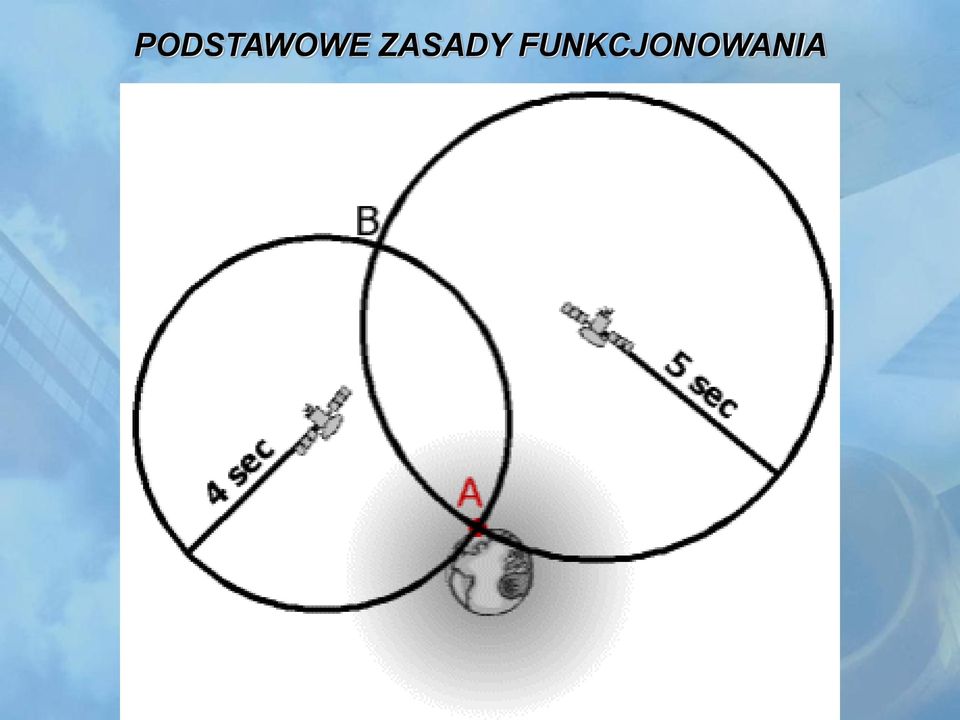
5 PODSTAWOWE ZASADY FUNKCJONOWANIA Każdy satelita cyklicznie i stale transmituje sygnał zawierający informację o układzie satelitów (almanach), informację identyfikacyjną, dokładny czas, dane orbity satelity (efemerydy) oraz inne dodatkowe informacje dotyczące stanu systemu. Odbiornik GPS na podstawie sygnału satelitów synchronizuje swój czas z czasem systemu GPS oraz oblicza pozycję (2D lub 3D współrzędne geograficzne, ewentualnie wysokość) odbiornika bazując na pomiarach pseudoodległości (odl. pomierzona jednostronnie) odbiornika od poszczególnych satelitów których sygnał został odebrany. Odległość odbiornika od poszczególnych satelitów jest obliczana na podstawie pomiaru czasu przebiegu sygnału od satelity do odbiornika. Odbywa się to przez porównanie czasu zakodowanego w każdym sygnale z czasem odbioru tego sygnału rejestrowanym przez odbiornik (D = c x t) Aby uzyskać użyteczną dokładność pozycji (przy pomiarze różnicy czasu) dokładność zegarów (pomiaru czasu) musi być bardzo duża. Sygnał rozprzestrzenia się z prędkością światła; prędkość rozchodzenia się fali elektromagnetycznej w próżni c = m/s
 odbiornika od poszczególnych satelitów których sygnał został odebrany.")
6 PODSTAWOWE ZASADY FUNKCJONOWANIA
7 PODSTAWOWE DANE SYSTEMU GPS Stacje monitorujące śledzą satelity i zbierają w sposób ciągły dane dot. ich orbit i czasu atomowych zegarów. Z tych danych oblicza się poprawki i korekty do danych orbit poszczególnych satelitów oraz korekty zegarów. Te poprawki i korekty są transmitowane z kilku stacji monitorujących do satelitów i następuje uaktualnienie danych emitowanych przez satelity. Jednak 1. Rozmieszczenie stacji naziemnych NIE ZAPEWNIA CIĄGŁEGO śledzenia KAŻDEGO satelity. 2. Korekty i poprawki są transmitowane do satelitów raz lub dwukrotnie na dobę a nie w sposób ciągły. Należy te cechy systemu mieć na uwadze, gdyż wpływa to na wiarygodność określanej pozycji i zapewnianą dokładność nawigacji

8 PODSTAWOWE ZASADY FUNKCJONOWANIA Zegary atomowe instalowane na satelitach mają dokładność 1 na (ewentualny błąd zegara rzędu 0.01 sek daje błąd odległości 3000km!) Uzyskanie pozycji w dwóch wymiarach (szerokość i długość geograficzna) wymaga śledzenia przez odbiornik co najmniej 3 satelitów Uzyskanie pozycji również w zakresie 3 wymiaru (wysokość) wymaga śledzenia dodatkowego satelity (min. 4) Segment użytkownika jest całkowicie bierny nie wymienia żadnych danych z satelitami i nie łączy się z segmentem naziemnym systemu GPS
 wymaga śledzenia dodatkowego satelity (min.")
9 ŹRÓDŁA BŁĘDÓW SYSTEMU GPS BŁĄD PRZEJŚCIA SYGNAŁU PRZEZ ATMOSFERĘ (jonosferyczny i troposferyczny) Sygnał satelity (20200km od powierzchni ziemi) potrzebuje teoretycznie 0.07 sekundy aby dotrzeć do odbiornika Sygnał przechodząc przez atmosferę ziemską zwalnia. Zjawisko to jest dobrze znane i większość odbiorników oblicza typową poprawkę dla standardowych warunków atmosfery. Nie są natomiast w stanie korygować nieprzewidywalnych i niestandardowych warunków (np. wynikających z silnych wiatrów słonecznych)

10 ŹRÓDŁA BŁĘDÓW SYSTEMU GPS BŁĄD GEOMETRII SATELITÓW: Pole szare reprezentuje możliwą lokalizację odbiornika z uwzględnieniem błędów odległości dla jednego satelity Pole niebieskie reprezentuje pozycję odbiornika przy uwzględnieniu linii pozycyjnych z dwóch satelitów Przy różnych kątach przecięcia linii pozycyjnych obserwujemy różną wielkość obszaru możliwych pozycji odbiornika. Jakość geometrii systemu określana jest współczynnikiami DOP (Dilution of Precision)

11 ŹRÓDŁA BŁĘDÓW SYSTEMU GPS WSPÓŁCZYNNIKI DOP DOSTĘPNE W SYSTEMIE: GDOP (Geometric Dilution Of Precision); kompleksowa dokładność systemu (koordynaty 3D i czas) PDOP (Positional Dilution Of Precision); dokładność pozycji (koordynaty 3D) HDOP (Horizontal Dilution Of Precision); dokładność pozioma (koordynaty 2D) VDOP (Vertical Dilution Of Precision); dokładność pionowa (wysokość) TDOP (Time Dilution Of Precision); dokładność czasu (czas) Wartości DOP wahają się w granicach od 1 do 50, przy czym 1 oznacza wartość idealną najlepszą, zaś 50 najbardziej niekorzystną. Przy nawigacji NPA RNAV GNSS wartość GDOP (opisująca geometrię systemu) nie powinna być większa niż 5.

12 ŹRÓDŁA BŁĘDÓW SYSTEMU GPS INNE ŹRÓDŁA BŁĘDÓW: Niedokładności lotu po nominalnej orbicie (lot po orbicie jest kontrolowany i korygowany dlatego wynikowy błąd pozycji nie powinien być większy niż 2m), Interferencja sygnału (odbiór sygnału odbitego od obiektu/góry/budynku) itp. Błąd zegara, Błąd obliczeń pozycji wynika ze stosowanych zaokrągleń w obliczeniach nie przekracza 1m Błędy wynikające z teorii względności (ruchu satelity i odbiornika, czasu oraz mniejszego pola grawitacyjnego działającego na satelity). Wynikowy błąd całkowity nie powinien przekraczać 15m
.")
13 DOKŁADNOŚĆ SYSTEMU GPS Sygnał GPS zawiera trzy ciągi danych: Kod C/A Kod P Ciąg danych nawigacyjnych i systemu (NAV/system data) Kod C/A zapewnia standardową usługę pozycjonowania i jest dostępny dla wszystkich użytkowników. Kod P zapewnia precyzyjną usługę pozycjonowania jego użycie jest limitowane dla sił zbrojnych USA oraz innych autoryzowanych użytkowników. Niedostępny dla lotnictwa cywilnego. NAV/system data kod zawierający dane orbit, poprawki: orbit, zegara inne dane nawigacyjne oraz informacje o statusie satelitów. Odbiór pełnego zestawu danych (sygnał 50Hz) wymaga 12.5 minuty. Jest to wymagany czas konfiguracji odbiornika GPS przy pierwszym użyciu.

14 DOKŁADNOŚĆ SYSTEMU GPS Selective Availability (S/A) Do maja 2000 stosowany był przez USA dodatkowy kod zakłócający tzw. Selective Availability (S/A). Jego zadaniem była redukcja dokładności pozycjonowania GPS w celu eliminacji wykorzystania sygnału GPS do potencjalnie wrogich zastosowań. Wprowadzany pseudolosowo dodatkowy błąd zegara i informacji nawigacyjnej powodował zmniejszenie dokładności pozycji do 100m. Częściowo efekt stosowania S/A można niwelować poprzez stosowanie DGPS. Od maja 2000 (wyłączenia S/A) nominalna dokładność pozycji wynosi 10-15m. Rząd USA gwarantuje dokładność dla SIS (signal in space - bez uwzględniania błędów odbiornika) w normalnych warunkach (brak awarii): 36m poziomo, 77m pionowo.

15 DOKŁADNOŚĆ SYSTEMU GPS RÓŻNICOWY GPS (DIFFERENTIAL GPS) Polega na umieszczeniu dodatkowego odbiornika GPS w dokładnie określonej i znanej pozycji. Odbiornik ten określa pozycję na podstawie sygnału satelitów i porównuje ją z danymi własnej znanej lokalizacji określając poprawkę. Następnie poprawka (korekta pozycji dla każdego satelity) jest udostępniana radiowo dla wszystkich odbiorników GPS znajdujących się w zasięgu. Metoda ta pozwalała na eliminację zakłócania S/A oraz pozwala na znaczącą eliminację błędów przejścia sygnału przez atmosferę, błędów zegara, orbity umożliwiając uzyskanie dokładności pozycji poniżej 5m.

16 DOKŁADNOŚĆ SYSTEMU GPS ZAGROŻENIA GPS ZAKŁÓCANIE/ZMIANA SYGNAŁU SATELITÓW Oprócz niezależnych interferencji czy błędów sygnału GPS istnieją proste i łatwo dostępne metody jego celowego zakłócenia czy zmiany. Najprostszą z nich jest zakłócanie (jamming). Sygnał GPS jest na tyle słaby, że niewielkiej mocy urządzenie zakłócające (wielkości pudełka zapałek) może spowodować zakłócenia uniemożliwiające odbiór sygnałów GPS w promieniu kilku do kilkudziesięciu kilometrów od urządzenia zakłócającego. Warto dodać, że zakłócanie i wynikowe znaczące odchylenie pozycji GPS w stosunku do rzeczywistego położenia może nastąpić również w okolicy pracy innych urządzeń emitujących silne pola elektromagnetyczne: radarów, stacji nadawczych itp. Planowana sieć komórkowej transmisji danych 4G, zdaniem specjalistów od GPS, może spowodować całkowite zagłuszenie sygnałów GPS w odległości 8-10km od nadajnika.

17 3.Od do wprowadzono błędną poprawkę jonosferyczną skutek degradacja dokładności pozycji o ok. 16m DOKŁADNOŚĆ SYSTEMU GPS ZAGROŻENIA GPS ZAKŁÓCANIE/ZMIANA SYGNAŁU SATELITÓW Inne techniki celowej zmiany/zakłócania sygnału GPS to: tzw. spoofing nadawanie zafałszowanego sygnału GPS tzw. meaconing opóźnienie i retransmisja sygnałów GPS Zdarzają się też błędy ludzkie i awarie sprzętu w znaczny sposób wpływające na dokładność pozycjonowania GPS. Przykłady?? Satelita PRN22 miał awarię zegara powodującą błąd pozycji kilkaset kilometrów!! Mimo że satelita był w zasięgu stacji monitorujących i kontrolnych jego sygnał został wyłączony z użytku po ponad godzinie (1:48) Satelita PRN23 miał również awarię zegara. Transmitował błędny sygnał przez ponad 2 godziny.

18 WADY i ZALETY GPS WNIOSKI: 1. Pomimo - wydawałoby się - dużej dokładności systemu GPS jego sygnał nie spełnia warunków wymaganych w nawigacji lotniczej w zakresie integralności (zdolność do przekazania w odpowiednim czasie ostrzeżenia, że używanie systemu nie jest odpowiednio dokładne). 2. Zarówno dostępność jak i dokładność jako cechy systemu nawigacyjnego mogą zostać ograniczone w wyniku ograniczonej liczby dostępnych satelitów i chwilowej ich geometrii. 3. Istnieje prawdopodobieństwo wystąpienia niezamierzonej (wpływ wiatrów słonecznych) oraz zamierzonej degradacji osiągów systemu poprzez celowe zakłócenie, zniekształcenie, opóźnienie sygnału satelitów. 4. GPS jest wojskowym systemem, kontrolowanym przez rząd USA. System jest co prawda wykorzystywany w skali światowej do celów cywilnych, ale pamiętać należy o tym, że priorytet zawsze mieć będą cele wojskowe.

19 WADY i ZALETY GPS ZALETY GPS: 1. System o globalnym zasięgu, zapewniający pożądaną dokładność nawigacji. 2. Pozwala na pozycjonowanie w 2 i 3 wymiarach również w zakresie prowadzenia pionowego. 3. Zapewnia nawigację w każdych warunkach atmosferycznych (niewrażliwy na zjawiska atmosferyczne w troposferze), na dowolnej trajektorii i w każdej fazie lotu statku powietrznego. 4. Nie wymaga stosowania zróżnicowanej awioniki (wyposażenia) i eliminuje konieczność kosztownych inwestycji w sieć naziemnych pomocy radionawigacyjnych. To są tylko wybrane bezpośrednie zalety systemu Można by w tym miejscu wymieniać szereg zalet pośrednich jak np.: zwiększenie pojemności przestrzeni, możliwość budowy zoptymalizowanej sieci dróg lotniczych, możliwość redukcji minimów separacji, poprawa świadomości sytuacji w kokpicie i wiele innych.
 i eliminuje konieczność kosztownych inwestycji w sieć naziemnych pomocy radionawigacyjnych.")
20 SYSTEMY WSPOMAGAJĄCE GPS (lub GLONASS) jest systemem nawigacyjnym spełniającym w lotnictwie cywilnym wymogi systemu pomocniczego (supplementary). Aby można było uznać go za system podstawowy (jakim jest GNSS) konieczne było poprawienie osiągów systemów źródłowych (GPS/GLONASS) szczególnie w zakresie ich integralności, dostępności i ciągłości. Osiąga się to poprzez wspomaganie GPS dodatkową funkcjonalnością i/lub dodatkowymi systemami. Stosowane są obecnie trzy rodzaje wspomagania GPS: ABAS Aircraft Based Augmentation System system wspomagania oparty na dodatkowej funkcjonalności wyposażenia pokładowego, SBAS - Space Based Augmentation System system wspomagania oparty o dodatkowe sygnały satelitarne, GBAS Ground Based Augmentation System system wspomagania oparty o dodatkowy system naziemny.

.")
21 SYSTEMY WSPOMAGAJĄCE - ABAS ABAS jest oparty na funkcjonalności RAIM (Receiver Autonomus Integrity Monitoring) odbiornika GNSS. RAIM monitoruje spójność sygnałów GPS; alarmuje w sytuacji utraty wymaganej dokładności nawigacji w danej fazie lotu (trasa/dolot/podejście). Oparty jest o algorytm FD Fault Detection pozwalający na wykrycie błędnych wskazań jednego z satelitów przyjętych do obliczenia pozycji. RAIM jest dostępny, jeśli jest widocznych / dostępnych minimum 5 satelitów zapewniających satysfakcjonującą geometrię do obliczenia pozycji (FD). Nowocześniejsze wersje RAIM wykorzystują algorytm FDE Fault Detection & Exclusion, dostępny przy minimum 6 dostępnych satelitach; który pozwala nie tylko na wykrycie błędnych wskazań satelity, ale również na ich wykluczenie z obliczeń pozycji nawigacyjnej co umożliwia kontynuację nawigacji bez alarmu RAIM.
22 SYSTEMY WSPOMAGAJĄCE - SBAS SBAS jest oparty na wykorzystaniu dodatkowych danych przesyłanych przez satelitę geostacjonarnego (innego systemu niż GPS) zwiększających dokładność i spójność nawigacji. W Europie wspomaganie SBAS jest zapewniane przez system EGNOS. W dużym uproszczeniu - naziemne stacje referencyjne systemu zbierają dane do korekt GPS, przekazują te dane do głównej stacji kontrolnej, która transmituje je do swego satelity geostacjonarnego. Satelita retransmituje te dane do użytkownika; zapewniając dodatkowo również pomiar odległości i informację o użyteczności nawigacyjnej satelitów GPS. Pozwala to na zwiększenie dokładności nawigacji; dzięki zwiększeniu dokładności w płaszczyźnie pionowej możliwość zastosowania prowadzenia pionowego GNSS w podejściach do lądowania (APV).
 Dokładność pionowa (95%) Czas do alarmu (TTA) Poziom alarmu")

23 SYSTEMY WSPOMAGAJĄCE - SBAS Parametry GNSS przy wspomaganiu EGNOS (APV): OSIĄGI EGNOS Dokładność pozioma (95%) Dokładność pionowa (95%) Czas do alarmu (TTA) Poziom alarmu horyzontalny Poziom alarmu - pionowy APV-I (minima LPV) 16m 20m 10s 40m 50m Systemy SBAS są systemami lokalnymi. Na terenie Ameryki Północnej funkcjonuje system - WAAS, w Japonii - MSAS, w Indiach GAGAN.
. Naziemne anteny zbierają sygnały GPS, przekazują je do jednostki centralnej, która oblicza i transmituje na pokład statku powietrznego dane dot.")
24 SYSTEMY WSPOMAGAJĄCE - GBAS GBAS jest oparty na wykorzystaniu dodatkowych danych przesyłanych przez dedykowany system naziemny zwiększających dokładność i spójność nawigacji do poziomu porównywalnego z systemem ILS (do podejść precyzyjnych). Naziemne anteny zbierają sygnały GPS, przekazują je do jednostki centralnej, która oblicza i transmituje na pokład statku powietrznego dane dot. ścieżki podejścia, bieżące korekty do sygnałów GPS oraz informacje dot. użyteczności satelitów. Stosowany wyłącznie w zakresie podejść do lądowania. Jeden system zainstalowany na lotnisku jest w stanie oprzyrządować w podejścia precyzyjne wszystkie drogi startowe.
25 INSTRUMENTALNE PROCEDURY LOTU GNSS Obecnie obowiązuje w tym zakresie koncepcja PBN (Performance Based Navigation). Zakłada ona przechodzenie z dotychczasowej nawigacji opartej o sensor na nawigację opartą o wymagane osiągi (dokładność nawigacji).
26 INSTRUMENTALNE PROCEDURY LOTU GNSS W PBN wyróżnia się dwie specyfikacje nawigacyjne stanowiące zestaw wymogów niezbędnych do wykonania operacji lotniczej w danej strukturze przestrzeni powietrznej: Specyfikację RNAV zakłada m.in. konieczność utrzymania wymaganej dokładności nawigacji wyrażonej liczbowo z prefixem RNAV (np. RNAV 5, RNAV 1). Inne wymogi określają kryteria spójności i ciągłości oraz wymogi funkcjonalne np. związane z posiadaniem pokładowej bazy danych. (ciągłość zdolność systemu do funkcjonowania bez przerw w czasie zamierzonej operacji, spójność / intergalność) zdolność systemu do funkcjonowania z wymaganą dokładnością w czasie zamierzonej operacji) Specyfikację RNP która dodatkowo do wymagań RNAV dodaje wymóg pokładowego monitoringu dokładności nawigacji oraz alarmowania (np. RNP 4)
27 INSTRUMENTALNE PROCEDURY LOTU GNSS
28 INSTRUMENTALNE PROCEDURY LOTU GNSS
29 INSTRUMENTALNE PROCEDURY LOTU GNSS W interesującym nas zakresie podejść do lądowania obowiązuje aplikacja nawigacyjna RNP APCH. Obejmuje ona 4 typy / rodzaje podejść do lądowania i charakteryzuje się 4 typami minimów: 1. NPA GNSS (ABAS) podejście nieprecyzyjne z prowadzeniem GNSS wspomaganym ABAS wyłącznie 2D (poziomym) minima LNAV. 2. NPA GNSS (SBAS) podejście nieprecyzyjne z prowadzeniem GNSS wspomaganym SBAS, nawigacja 2D minima LP. 3. APV Baro-VNAV podejście nieprecyzyjne z prowadzeniem GNSS ABAS (2D) i pionowym (wysokościomierz barometryczny); nawigacja 3D minima LNAV/VNAV. 4. LPV podejście nieprecyzyjne (localizer performance with vertical guidance) z prowadzeniem GNSS SBAS 3D minima LPV.
30 Pytania?? DZIĘKUJĘ ZA UWAGĘ
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
NAWIGACJA GNSS PROCEDURY. Warszawa, MARZEC 2013 r.
 NAWIGACJA GNSS PROCEDURY Warszawa, MARZEC 2013 r. PROCEDURY NPA RNAV GNSS Wdrożenie nieprecyzyjnych procedur podejścia do lądowania RNAV (GNSS), planowane zgodnie z cyklem AIRAC w dniu 04.04.2013, obejmuje:
NAWIGACJA GNSS PROCEDURY Warszawa, MARZEC 2013 r. PROCEDURY NPA RNAV GNSS Wdrożenie nieprecyzyjnych procedur podejścia do lądowania RNAV (GNSS), planowane zgodnie z cyklem AIRAC w dniu 04.04.2013, obejmuje:
Wdrożenie procedur podejścia GNSS na lotniskach General Aviation
 Wdrożenie procedur podejścia GNSS na lotniskach General Aviation Biuro Przygotowania Operacyjnego Dział Projektowania Procedur i Analizy Przeszkód Lotniczych Krosno, 2018-06-15 Zagadnienia 1. Co to jest
Wdrożenie procedur podejścia GNSS na lotniskach General Aviation Biuro Przygotowania Operacyjnego Dział Projektowania Procedur i Analizy Przeszkód Lotniczych Krosno, 2018-06-15 Zagadnienia 1. Co to jest
PODEJŚCIA DO LĄDOWANIA APV SBAS NA LOTNISKACH W FIR WARSZAWA
 PODEJŚCIA DO LĄDOWANIA APV SBAS NA LOTNISKACH W FIR WARSZAWA PIOTR CZEŚNIK piotr.czesnik@pansa.pl Kierownik Działu Projektowania Procedur i Analizy Przeszkód Lotniczych RYS HISTORYCZNY WDROŻEŃ PROCEDUR
PODEJŚCIA DO LĄDOWANIA APV SBAS NA LOTNISKACH W FIR WARSZAWA PIOTR CZEŚNIK piotr.czesnik@pansa.pl Kierownik Działu Projektowania Procedur i Analizy Przeszkód Lotniczych RYS HISTORYCZNY WDROŻEŃ PROCEDUR
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
NAWIGACJA GNSS MAPY PROCEDUR RNAV GNSS. Warszawa, 2015 r.
 NAWIGACJA GNSS MAPY PROCEDUR RNAV GNSS Warszawa, 2015 r. PROCEDURY RNAV GNSS Procedury podejścia RNAV GNSS do minimów LNAV dla większości lotnisk kontrolowanych zostały wdrożone operacyjnie zgodnie z cyklem
NAWIGACJA GNSS MAPY PROCEDUR RNAV GNSS Warszawa, 2015 r. PROCEDURY RNAV GNSS Procedury podejścia RNAV GNSS do minimów LNAV dla większości lotnisk kontrolowanych zostały wdrożone operacyjnie zgodnie z cyklem
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Istniejące systemy satelitarne: GPS NAVSTAR, GLONASS, BEIDOU (COMPASS), samodzielnie, nie spełniają kryteriów wymaganych przez ICAO w odniesieniu do
, samodzielnie, nie spełniają kryteriów wymaganych przez ICAO w odniesieniu do") NAWIGACJA GNSS PROCEDURY LOTU RNAV NAWIGACJA GNSS Istniejące systemy satelitarne: GPS NAVSTAR, GLONASS, BEIDOU (COMPASS), samodzielnie, nie spełniają kryteriów wymaganych przez ICAO w odniesieniu do lotniczych
NAWIGACJA GNSS PROCEDURY LOTU RNAV NAWIGACJA GNSS Istniejące systemy satelitarne: GPS NAVSTAR, GLONASS, BEIDOU (COMPASS), samodzielnie, nie spełniają kryteriów wymaganych przez ICAO w odniesieniu do lotniczych
GNSS, DOC 10 10, , 11, 15, DOC 9674 WGS-84
 NAWIGACJA GNSS PRZEPISY DOC 9849 GNSS Manual zawiera informacje związane z aspektami wdrożeniowymi GNSS. Podręcznik opisujący jak wdrożyć operacje GNSS. Aneks 10 Telekomunikacja lotnicza, tom I Pomoce
NAWIGACJA GNSS PRZEPISY DOC 9849 GNSS Manual zawiera informacje związane z aspektami wdrożeniowymi GNSS. Podręcznik opisujący jak wdrożyć operacje GNSS. Aneks 10 Telekomunikacja lotnicza, tom I Pomoce
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek
 Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
Analiza metod SIS i koncepcja ich wykorzystania podczas podejścia do lądowania według GNSS. Krzysztof Banaszek Chełm, 15.02.2005 Zakres prezentacji Wymagania ICAO dla systemów GNSS Wymagania ICAO dla poszczególnych
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej
 CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS
 WRONA Maciej 1 ANESZKO Aneta Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS WSTĘP Wraz ze wzrostem aplikacji wykorzystujących Globalny System Nawigacji Satelitarnej na
WRONA Maciej 1 ANESZKO Aneta Ocena wpływu zagłuszeń celowych na jakość pozycjonowania pojazdów techniką GNSS WSTĘP Wraz ze wzrostem aplikacji wykorzystujących Globalny System Nawigacji Satelitarnej na
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Wpływ implementacji systemów GNSS na lotniskach regionalnych i lokalnych na rozwój rynku samolotów GA i System Transportu Małymi Samolotami.
 Wpływ implementacji systemów GNSS na lotniskach regionalnych i lokalnych na rozwój rynku samolotów GA i System Transportu Małymi Samolotami. Jarosław Paszyn Samoloty.pl System Transportu Małymi Samolotami
Wpływ implementacji systemów GNSS na lotniskach regionalnych i lokalnych na rozwój rynku samolotów GA i System Transportu Małymi Samolotami. Jarosław Paszyn Samoloty.pl System Transportu Małymi Samolotami
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
IMPLEMENTACJA PROCEDUR LPV W SYMULATORACH LOTNICZYCH
 Szybkobieżne Pojazdy Gąsienicowe (33) nr 2, 2013 Oleg ANTEMIJCZUK Krzysztof TOKARZ Eugeniusz PIECHOCZEK IMPLEMENTACJA PROCEDUR LPV W SYMULATORACH LOTNICZYCH Streszczenie. Dzięki możliwościom systemu EGNOS
Szybkobieżne Pojazdy Gąsienicowe (33) nr 2, 2013 Oleg ANTEMIJCZUK Krzysztof TOKARZ Eugeniusz PIECHOCZEK IMPLEMENTACJA PROCEDUR LPV W SYMULATORACH LOTNICZYCH Streszczenie. Dzięki możliwościom systemu EGNOS
ROZPORZĄDZENIE WYKONAWCZE KOMISJI (UE)
") 26.7.2018 L 189/3 ROZPORZĄDZENIA ROZPORZĄDZENIE WYKONAWCZE KOMISJI (UE) 2018/1048 z dnia 18 lipca 2018 r. ustanawiające wymogi dotyczące korzystania z przestrzeni powietrznej i procedury operacyjne dotyczące
26.7.2018 L 189/3 ROZPORZĄDZENIA ROZPORZĄDZENIE WYKONAWCZE KOMISJI (UE) 2018/1048 z dnia 18 lipca 2018 r. ustanawiające wymogi dotyczące korzystania z przestrzeni powietrznej i procedury operacyjne dotyczące
Patronat nad projektem objęły: ESA (Europejska Agencja Kosmiczna), Komisja Europejska (KE),
, Komisja Europejska (KE),") Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
EGNOS to działa! Za oknem widać niewiele, Więcej niż GPS. WYDARZENIE Próby lotne podejść APV I
 WYDARZENIE Próby lotne podejść APV I EGNOS to działa! Za oknem widać niewiele, a na pewno nie widać lotniska. Pod nami poletka i lasy rozmyte zamgleniem. Lecimy po kresce procedury do lądowania. Zniżamy
WYDARZENIE Próby lotne podejść APV I EGNOS to działa! Za oknem widać niewiele, a na pewno nie widać lotniska. Pod nami poletka i lasy rozmyte zamgleniem. Lecimy po kresce procedury do lądowania. Zniżamy
Czy da się zastosować teorię względności do celów praktycznych?
 Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
WYKORZYSTANIE SYSTEMU EGNOS NA POTRZEBY NAWIGACJI LOTNICZEJ W POLSCE WSCHODNIEJ
 1-2011 PROBLEMY EKSPLOATACJI 57 Janusz ĆWIKLAK, Marek GRZEGORZEWSKI, Henryk JAFERNIK, Stanisław OSZCZAK Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Adam CIEĆKO Uniwersytet Warmińsko-Mazurski w
1-2011 PROBLEMY EKSPLOATACJI 57 Janusz ĆWIKLAK, Marek GRZEGORZEWSKI, Henryk JAFERNIK, Stanisław OSZCZAK Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Adam CIEĆKO Uniwersytet Warmińsko-Mazurski w
w ramach eksperymentalnych podejść RNAV EGNOS/GNSS
 Lotnicza walidacja procedur LPV w ramach eksperymentalnych podejść RNAV EGNOS/GNSS Andrzej Fellner Henryk Jafernik Paweł Trómiński Konferencja Komisji Geodezji Satelitarnej Komitetu Badao Kosmicznych i
Lotnicza walidacja procedur LPV w ramach eksperymentalnych podejść RNAV EGNOS/GNSS Andrzej Fellner Henryk Jafernik Paweł Trómiński Konferencja Komisji Geodezji Satelitarnej Komitetu Badao Kosmicznych i
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
BADANIE WPŁ YWU GEOMETRII SYSTEMU NA DOKŁ ADNOŚĆ OKREŚ LANIA POZYCJI ZA POMOCĄ ODBIORNIKA GPS
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
DOKŁ ADNOŚĆ SERWISU EGNOS W KONTEKŚ CIE OBSŁ UGI OPERACJI LOTNISKOWYCH
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LII NR 1 (184) 2011 Andrzej Felski Akademia Marynarki Wojennej Krzysztof Banaszek Tomasz Woź niak Piotr Zakrzewski Polska Agencja Ż eglugi Powietrznej DOKŁ
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LII NR 1 (184) 2011 Andrzej Felski Akademia Marynarki Wojennej Krzysztof Banaszek Tomasz Woź niak Piotr Zakrzewski Polska Agencja Ż eglugi Powietrznej DOKŁ
OPIS PRZEDMIOTU ZAMÓWIENIA
 Załącznik nr 1 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest usługa polegająca na wykonywaniu okresowej kontroli z powietrza lotniczych urządzeń naziemnych NAV i VAN funkcjonujących na
Załącznik nr 1 do SIWZ OPIS PRZEDMIOTU ZAMÓWIENIA Przedmiotem zamówienia jest usługa polegająca na wykonywaniu okresowej kontroli z powietrza lotniczych urządzeń naziemnych NAV i VAN funkcjonujących na
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
Wyposażenie Samolotu
 P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
roku system nawigacji satelitarnej TRANSIT. System ten wykorzystywano
 System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
SATELITARNE TECHNIKI POMIAROWE
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS
Recenzja Rozprawy doktorskiej mgr int Pawła Przestrzelskiego pt.: Sieciowe pozycjonowanie różnicowe z wykorzystaniem obserwacji GPS i GLONASS"
 *jp"
*jp"
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
KOMPONENTY INERCJALNE
 KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Wizualizacja i analiza danych lokalizacyjnych odbiorników GPS
 ZESPÓŁ LABORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LABORATORIUM Lokalizacji i zarządzania środkami transportu INSTRUKCJA DO ĆWICZENIA
ZESPÓŁ LABORATORIÓW TELEMATYKI TRANSPORTU ZAKŁAD TELEKOMUNIKACJI W TRANSPORCIE WYDZIAŁ TRANSPORTU POLITECHNIKI WARSZAWSKIEJ LABORATORIUM Lokalizacji i zarządzania środkami transportu INSTRUKCJA DO ĆWICZENIA
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
NAWIGACJA OBSZAROWA ORAZ OSIĄGI SYSTEMÓW GNSS/EGNOS JAKO PODSTAWA DO POPRAWY POZYCJONOWANIA, SEPARACJI ORAZ WZROSTU POJEMNOŚCI LOTNISKA
 Krzysztof Banaszek Polska Agencja Żeglugi Powietrznej NAWIGACJA OBSZAROWA ORAZ OSIĄGI SYSTEMÓW GNSS/EGNOS JAKO PODSTAWA DO POPRAWY POZYCJONOWANIA, SEPARACJI ORAZ WZROSTU POJEMNOŚCI LOTNISKA Streszczenie:
Krzysztof Banaszek Polska Agencja Żeglugi Powietrznej NAWIGACJA OBSZAROWA ORAZ OSIĄGI SYSTEMÓW GNSS/EGNOS JAKO PODSTAWA DO POPRAWY POZYCJONOWANIA, SEPARACJI ORAZ WZROSTU POJEMNOŚCI LOTNISKA Streszczenie:
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Dlaczego system GPS latającym Einsteinem jest?
 Dlaczego system GPS latającym Einsteinem jest? (Dżipiesomania) dr hab. inż. Włodzimierz Salejda, prof. nadzw. PWr, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/
Dlaczego system GPS latającym Einsteinem jest? (Dżipiesomania) dr hab. inż. Włodzimierz Salejda, prof. nadzw. PWr, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/
EEGS. możliwości poprawy jakości systemu EGNOS. EGNOS Extension to Eastern Europe. 04 czerwca 2011 Wrocław
 EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
EEGS możliwości poprawy jakości systemu EGNOS 04 czerwca 011 Wrocław R.Zdunek, J. Zielioski, M.Krywanis-Brzostowska PLAN O projekcie Testy Statyczne Kinematyczne Metody poprawy jakości systemu EGNOS Kontynuacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport
 Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport Volume 90 2016 p-issn: 0209-3324 e-issn: 2450-1549 DOI: 10.20858/sjsutst.2016.90.9
Scientific Journal of Silesian University of Technology. Series Transport Zeszyty Naukowe Politechniki Śląskiej. Seria Transport Volume 90 2016 p-issn: 0209-3324 e-issn: 2450-1549 DOI: 10.20858/sjsutst.2016.90.9
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ Mikołaj KSIĘŻAK Seminarium Dyplomowe
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ Mikołaj KSIĘŻAK Seminarium Dyplomowe
RYZYKO OPERACJI LOTNISKOWYCH A DOKŁADNOŚĆ POZYCJONOWANIA (RNP)
") 4-2009 PROBLEMY EKSPLOATACJI 71 Krzysztof BANASZEK PAŻP / PANSA Warszawa Marek MALARSKI Politechnika Warszawska RYZYKO OPERACJI LOTNISKOWYCH A DOKŁADNOŚĆ POZYCJONOWANIA (RNP) Słowa kluczowe Ruch lotniczy,
4-2009 PROBLEMY EKSPLOATACJI 71 Krzysztof BANASZEK PAŻP / PANSA Warszawa Marek MALARSKI Politechnika Warszawska RYZYKO OPERACJI LOTNISKOWYCH A DOKŁADNOŚĆ POZYCJONOWANIA (RNP) Słowa kluczowe Ruch lotniczy,
Cel działania: redukcja ryzyka kolizji z ziemią. Opracowany w latach 70-tych pod wpływem dużej liczby wypadków typu CFIT.
 GPWS Ground Proximity Warning System Cel działania: redukcja ryzyka kolizji z ziemią. Opracowany w latach 70-tych pod wpływem dużej liczby wypadków typu CFIT. Zasada działania: GPWS wykorzystuje wskazania
GPWS Ground Proximity Warning System Cel działania: redukcja ryzyka kolizji z ziemią. Opracowany w latach 70-tych pod wpływem dużej liczby wypadków typu CFIT. Zasada działania: GPWS wykorzystuje wskazania
Dwa podstawowe układy współrzędnych: prostokątny i sferyczny
 Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Linia pozycyjna. dr inż. Paweł Zalewski. w radionawigacji
 Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
Linia pozycyjna dr inż. Paweł Zalewski w radionawigacji Wprowadzenie Jednym z zadań nawigacji jest określenie pozycji jednostki ruchomej - człowieka, pojazdu, statku czy samolotu. Pozycję ustala się przez
AGROCOM system jazdy równoległej
 AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
AGROCOM system jazdy równoległej Jerzy Koronczok Agrocom Polska. Oprogramowanie i nowe możliwości dla rolnictwa. 47-120 Żędowice GPS systemy prowadzenia równoległego Agrocom E-DRIVE: Nowości Baseline HD
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Asystent Lądowania ILS (ILS Assistant) w systemie Pitlab&Zbig OSD
 w systemie Pitlab&Zbig OSD") Asystent Lądowania ILS (ILS Assistant) w systemie Pitlab&Zbig OSD Asystent Lądowania ILS (ang. Instrument Landing System) jest systemem wspierającym bezpieczne i precyzyjne lądowanie modelem w warunkach
Asystent Lądowania ILS (ILS Assistant) w systemie Pitlab&Zbig OSD Asystent Lądowania ILS (ang. Instrument Landing System) jest systemem wspierającym bezpieczne i precyzyjne lądowanie modelem w warunkach
Analiza dokładności i dostępności serwisów systemu ASG-EUPOS w nawigacji i transporcie lotniczym
 CIEĆKO Adam 1,2 GRUNWALD Grzegorz 2 KAŹMIERCZAK Rafał 2 GRZEGORZEWSKI Marek 1 ĆWIKLAK Janusz 1 OSZCZAK Stanisław 1 BAKUŁA Mieczysław 1,2 Analiza dokładności i dostępności serwisów systemu ASG-EUPOS w nawigacji
CIEĆKO Adam 1,2 GRUNWALD Grzegorz 2 KAŹMIERCZAK Rafał 2 GRZEGORZEWSKI Marek 1 ĆWIKLAK Janusz 1 OSZCZAK Stanisław 1 BAKUŁA Mieczysław 1,2 Analiza dokładności i dostępności serwisów systemu ASG-EUPOS w nawigacji
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku
 kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Zasada pracy różnicowego GPS - DGPS. dr inż. Paweł Zalewski
 Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
PRZYGOTOWANIE, PRZEKAZANIE I PUBLIKACJA W AIP INFORMACJI AIS DOT
 PRZYGOTOWANIE, PRZEKAZANIE I PUBLIKACJA W AIP INFORMACJI AIS DOT. MAŁYCH LOTNISK ORAZ WYMOGI DOTYCZĄCE OPERATÓW PRZESZKÓD NIEZBĘDNYCH DLA PRAWIDŁOWYCH PUBLIKACJI AIS/AIM ORAZ OPRACOWANIA PROCEDUR PODEJŚCIA
PRZYGOTOWANIE, PRZEKAZANIE I PUBLIKACJA W AIP INFORMACJI AIS DOT. MAŁYCH LOTNISK ORAZ WYMOGI DOTYCZĄCE OPERATÓW PRZESZKÓD NIEZBĘDNYCH DLA PRAWIDŁOWYCH PUBLIKACJI AIS/AIM ORAZ OPRACOWANIA PROCEDUR PODEJŚCIA
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT CIEĆKO Adam 1 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 OSZCZAK Stanisław 1 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz
TRANSCOMP XV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT CIEĆKO Adam 1 GRUNWALD Grzegorz 1 KAŹMIERCZAK Rafał 1 OSZCZAK Stanisław 1 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz