LABORATORIUM Podstawy mechatroniki Programowanie robota przemysłowego ABB IRB 1600 w środowisku ABB RobotStudio
|
|
|
- Sylwia Głowacka
- 6 lat temu
- Przeglądów:
Transkrypt
1 Katedra Inżynierii Biomedycznej, Mechatroniki i Teorii Mechanizmów LABORATORIUM Podstawy mechatroniki Programowanie robota przemysłowego ABB IRB 1600 w środowisku ABB RobotStudio Wrocław 2016
2 Laboratorium układów mechatronicznych Nazwa stanowiska: Stanowisko do programowania robota przemysłowego ABB IRB 1600 Widok stanowiska: Opis stanowiska: Podstawowy system robota IRC5 składa się ze sterownika robota, panelu FlexPendant, oprogramowania RobotStudio i jednego lub kilku robotów lub innych urządzeń mechanicznych. W jego skład mogą wchodzić także urządzenia do obróbki i dodatkowe opcje programowe. Głównymi elementami istniejącego stanowiska są: Robot przemysłowy ABB IRB 1600 wraz z osprzętem Komputer z zainstalowanym RobotStudio (wersja użyta w niniejszej instrukcji) Podajnik taśmowy Kamera IVC-2D R (IVC-2DR1111) Dokładny opis stanowiska znajduje się w dalszej części instrukcji. Cel zajęć: Celem zajęć jest zapoznanie się ze sposobem programowania robota przemysłowego ABB IRB 1600 w trybie offline. Programowanie polega na utworzeniu programu realizującego trajektorie ruchu na podstawie bryły 3D utworzonej w programie do modelowania bryłowego np. w Inventorze. Zadania do wykonania w RobotStudio 1. Import narzędzia oraz bryły 3D (detalu) wskazanego przez prowadzącego; 2. Zdefiniowanie układu współrzędnych detalu; 3. Utworzenie programu realizującego ruch po trajektorii na podstawie geometrii detalu; 4. Symulacja działania programu; Zadania do wykonania na rzeczywistym stanowisku 1. Zapoznanie się z zasadami bezpieczeństwa i ze sposobem poruszania robota w trybie ręcznym; 2. Import systemu robota (program, dane narzędzia itp.) z RobotStudio; 3. Redefiniowanie układu współrzędnych detalu; 4. Uruchomienie programu realizującego trajektorię ruchu (narysowanie trajektorii na kartce otrzymanej od prowadzącego); 5. Porównanie wykonanej trajektorii z trajektorią wzorcową; 2


3 1. Opis stanowiska Poniżej (Rys. 1.1) przedstawiono widok stanowiska wraz z nazwami poszczególnych elementów. Wyłącznik główny Robot Kamera [LT1] FlexPendant (TeachPendan Sterownik robota [RC1] Sterownik taśmociągu [EC1] Podajnik taśmowy [CNV1] Stanowisko komputerowe Narzędzie Kurtyna świetlna FlexPendant (TeachPendant) Rys. 1.1 budowa stanowiska Robot Głównym elementem stanowiska jest robot ABB wersji IRB / 1.45 o maksymalnym udźwigu 6 kg i zasięgu 1,45m. zakres pracy robota i prędkości osi przedstawiono na Rys FlexPendant Panel FlexPendant (nazywany czasem TPU lub panelem dotykowym) jest ręcznym urządzeniem sterującym, służącym do wykonywania wielu zadań związanych z obsługą systemu robota: uruchamiania programów, wykonywania ruchów impulsowych manipulatorem, modyfikowania programów itp. Opis panelu znajduje się w Tab Panel FlexPendant obejmuje urządzenie oraz oprogramowanie i jest sam w sobie kompletnym komputerem. Stanowi integralną część sterownika IRC5. 3
 A B Złącze Ekran dotykowy C Przycisk zatrzymania awaryjnego D Drążek sterowniczy E F G H Port USB Urządzenie uruchamiające")
. G Przełączanie trybu ruchu, osie 1 3 lub 4 6. H Przełączanie regulacji.")
. Powoduje wykonanie następnej instrukcji programu.")
4 Rys. 1.2 zakres pracy robota Tab. 1-1 opis panelu FlexPendant Rys. 1.3 panel FlexPendant Rys. 1.4 przyciski sprzętowe Panel FlexPendant (Rys. 1.3) A B Złącze Ekran dotykowy C Przycisk zatrzymania awaryjnego D Drążek sterowniczy E F G H Port USB Urządzenie uruchamiające Rysik Przycisk resetowania Przyciski sprzętowe (Rys. 1.4) A - D Klawisze programowalne, 1 4. E Wybór urządzenia mechanicznego. F Przełączanie trybu ruchu (liniowy lub reorientacja). G Przełączanie trybu ruchu, osie 1 3 lub 4 6. H Przełączanie regulacji. J Przycisk Step BACKWARD (W tył). Powoduje wykonanie poprzedniej instrukcji programu. K Przycisk START. Rozpoczyna wykonywanie programu. L Przycisk Step FORWARD (W przód). Powoduje wykonanie następnej instrukcji programu. M Przycisk STOP. Zatrzymuje wykonywanie programu. 4
 wyświetla wartość lub ustawienie obecnie wybranej właściwości. W trybie ręcznym przycisk menu Quickset wyświetla obecnie wybrane urządzenie mechaniczne, tryb ruchu i wielkość wzrostu. Tab.")
 D Ustawienia")
5 o Menu Quickset Menu QuickSet zapewnia szybszy sposób zmiany m.in. ustawień impulsowania niż widok Jogging. Każdy przycisk menu (Rys. 1.5) wyświetla wartość lub ustawienie obecnie wybranej właściwości. W trybie ręcznym przycisk menu Quickset wyświetla obecnie wybrane urządzenie mechaniczne, tryb ruchu i wielkość wzrostu. Tab. 1-2 menu Quickset A Urządzenie mechaniczne (Rys. 1.6) B Wzrost (Rys. 1.7) C Tryb uruchamiania (Rys. 1.8) D Tryb kroków E Prędkość F Zadania Rys. 1.5 menu Quickset Tab. 1-3 Urządzenie mechaniczne Rys. 1.6 Urządzenie mechaniczne A Urządzenie mechaniczne B Urządzenie mechaniczne; wybrane urządzenie jest podświetlone C Ustawienia trybu ruchu (obecnie wybrany jest tryb ruchu osi 1 3) D Ustawienia narzędzia (obecnie wybrane jest narzędzie 0) E Ustawienia obiektu roboczego (obecnie wybrany jest obiekt roboczy 0) F Ustawienia układu współrzędnych (obecnie wybrane są współrzędne geograficzne) G Show details H Wyłącz koordynację 5

 E Ustawienia obiektu roboczego (obecnie wybrany jest obiekt roboczy 0) F Ustawienia układu współrzędnych (obecnie wybrane są współrzędne geograficzne) G")
6 Tab. 1-4 menu Increment Rys. 1.7 Ilustracja Increment A Urządzenie mechaniczne B Urządzenie mechaniczne; wybrane urządzenie jest podświetlone C Ustawienia trybu ruchu (obecnie wybrany jest tryb ruchu osi 1 3) D Ustawienia narzędzia (obecnie wybrane jest narzędzie 0) E Ustawienia obiektu roboczego (obecnie wybrany jest obiekt roboczy 0) F Ustawienia układu współrzędnych (obecnie wybrane są współrzędne geograficzne) G Show details H Wyłącz koordynację Tab. 1-5 tryb uruchomienia Single Cycle Wykonuje jeden cykl, a następnie zatrzymuje wykonywanie. Continuous Wykonuje zadanie bez zatrzymywania. Rys. 1.8 Ilustracja trybu uruchamiania Szafa sterownicza Sterownik IRC5 zawiera wszystkie funkcje potrzebne do przesuwania robota i sterowania nim. Standardowy sterownik IRC5 obejmuje jedną szafę, Single Cabinet Controller (Rys. 1.9 C). Sterownik może także obejmować dwie szafy Dual Cabinet Controller (A,B) lub zostać wbudowany w szafę zewnętrzną, Panel Mounted Controller. Sterownik składa się z dwóch modułów Control Module i Drive Module. 6
7 o o Moduł Control Module zawiera całą elektronikę sterującą, taką jak komputer główny, płyty We/Wy i pamięć flash. Moduł Control Module obsługuje całe oprogramowanie potrzebne do sterowania robotem (tj. system RobotWare). Moduł Drive Module zawiera elektronikę zasilającą silniki robota. Moduł Drive Module IRC5 może zawierać dziewięć jednostek napędowych i obsługiwać sześć osi wewnętrznych plus dwie osie dodatkowe, w zależności od modelu robota. W przypadku sterowania pracą kilku robotów za pomocą jednego sterownika (opcja MultiMove), dla każdego dodatkowego robota konieczne będzie dodanie dodatkowego modułu drive module. Potrzebny będzie jednak tylko jeden moduł control module. Rys. 1.9 szafy sterownicze Poniżej (Rys opis w Tab. 1-6) przedstawiono przyciski i gniazda sterownika IRC5. Niektóre przyciski i gniazda są opcjonalne, dlatego mogą nie być dostępne na danym sterowniku. Przyciski i gniazda wyglądają identycznie, jednak ich położenie może być inne w zależności od modelu sterownika (Single Cabinet Controller, Dual Cabinet Controller lub Panel Mounted Controller) oraz w przypadku zewnętrznego panelu operatora. Tab. 1-6 przyciski i gniazda sterownika Rys przyciski i gniazda sterownika A B C D E F G H J K L Wyłącznik główny Zatrzymanie awaryjne Silniki wł. Przełącznik trybów Diody LED łańcucha zabezpieczeń (opcjonalne) Port USB Gniazdo serwisowe do podłączania komputera (opcjonalne) Licznik czasu pracy (opcjonalny) Gniazdo serwisowe 115/230V, 200 W (opcjonalne) Hot plug Przycisk (opcjonalny) Złącze FlexPendant 7
8 Impulsowanie robota o Co to jest impulsowanie? Impulsowanie to ręcznie ustawianie lub przesuwanie robota lub osi zewnętrznych za pomocą drążka sterowniczego panelu FlexPendant. o Kiedy możliwe jest impulsowanie? Impulsować można w trybie ręcznym. Impulsowanie jest możliwe niezależnie od wyświetlanego na panelu FlexPendant widoku, ale nie można impulsować podczas wykonywania programu. o Informacje o trybach ruchu i robotach Wybrany tryb ruchu i/lub układ współrzędnych określa sposób poruszania się robota. Opis trybów ruchu robota znajduje się w Tab. 1-7 o Wprowadzenie do kierunków drążka sterowniczego Obszar Joystick Directions wskazuje sposób przypisania osi wybranego układu współrzędnych kierunkom drążka sterowniczego. UWAGA! Właściwości kierunków nie wskazują kierunków ruchu urządzenia mechanicznego. Należy zawsze przeprowadzić próbę z niewielkimi ruchami drążka sterowniczego w celu sprawdzenia rzeczywistych kierunków urządzenia mechanicznego. Tab. 1-7 kierunki drążka sterowniczego Tryb ruchu Ilustracja drążka sterowniczego Opis Liniowy punkt centralny narzędzia porusza się wzdłuż prostych linii, w sposób przejdź od punktu A do punktu B. Środek narzędzia porusza się w kierunku osi wybranego układu współrzędnych. Osie 1, 2 i 3 (domyślne dla robotów) Osie 4, 5 i 6 Poruszane są pojedyncze osie robota (Rys. 1.11). Trudno jest więc przewidzieć sposób poruszania się środka narzędzia. Reorientacja Narzędzie porusza się wokół punktu środkowego narzędzia (TCP). Ilustracja kierunków drążka sterowniczego i osi Osie typowego manipulatora 6-osiowego mogą być impulsowane ręcznie za pomocą drążka sterowniczego. Poniższa ilustracja (Rys. 1.11) przedstawia schematy ruchu każdej osi manipulatora. 8
9 Rys schematy ruchu każdej osi manipulatora o Informacje o układach współrzędnych Umieszczanie kołków w otworach za pomocą chwytaków może być bardzo proste w układzie współrzędnych narzędzia, jeśli jedna ze współrzędnych tego układu jest równoległa do otworu. Wykonywanie tego samego zadania w układzie współrzędnych bazowych może wymagać impulsowania w osiach x, y i z, co w znacznym stopniu utrudnia precyzyjne działanie. Wybranie odpowiedniego układu współrzędnych ułatwia impulsowanie, ale nie ma określonego, prostego sposobu na wybranie odpowiedniego układu. Niektóre układy współrzędnych umożliwiają przesuwanie środka narzędzia w miejsce docelowe przy użyciu mniejszej ilości ruchów drążka sterowniczego niż w przypadku innych układów. Wyborem odpowiedniego układu współrzędnych powinny kierować takie warunki, jak ograniczenia miejsca, przeszkody albo rozmiar obiektu roboczego lub narzędzia. Układ współrzędnych definiuje płaszczyznę lub przestrzeń za pomocą osi wychodzących z ustalonego punktu, nazywanego początkiem. Cele i pozycje robotów lokalizuje się poprzez pomiar wykonywany wzdłuż osi układów współrzędnych. Robot korzysta z kilku układów współrzędnych, z których każdy dostosowany jest do określonych typów programowania lub impulsowania. Rys bazowy układ współrzędnych Bazowy układ współrzędnych znajduje się u podstawy robota. Jest to najłatwiejszy układ współrzędnych do przesuwania robota z jednej pozycji do innej (Rys. 1.12). Punkt zerowy bazowego układu współrzędnych znajduje się u podstawy robota. Układ współrzędnych obiektu roboczego związany jest z obiektem roboczym i jest często najlepszym układem do programowania robota (Rys. 1.13). Układ współrzędnych obiektu roboczego odnosi się do obiektu roboczego (Rys B,C): 9
10 Układ współrzędnych obiektu roboczego 1 Układ współrzędnych obiektu roboczego 2 Układ współrzędnych geograficznych Rys układ współrzędnych obiektu roboczego definiuje jego położenie względem układu współrzędnych geograficznych (Rys A) lub dowolnego innego układu współrzędnych. Układ współrzędnych narzędzia definiuje pozycję narzędzia używanego przez robota podczas osiągania zaprogramowanych celów (Rys. 1.15). Układ współrzędnych geograficznych, definiujący gniazdo robocze jest układem, do którego odnoszą się, pośrednio lub bezpośrednio, wszystkie pozostałe układy współrzędnych. Jest on przydatny podczas impulsowania, ogólnych ruchów robota oraz stanowisk manipulacyjnych i gniazd zawierających kilka robotów lub roboty poruszane osiami zewnętrznymi (Rys. 1.15). Układ współrzędnych użytkownika jest przydatny przy określaniu sprzętu posiadającego inne układy współrzędnych, np. obiektów roboczych. Bazowy układ współrzędnych robota 1 Rys układ współrzędnych narzędzia Współrzędne geograficzne Bazowy układ współrzędnych robota 2 Rys układ współrzędnych geograficznych Język RAPID Aplikacja lub program RAPID zawiera sekwencję instrukcji sterujących robotem i umożliwiających mu wykonywanie czynności, do których jest przeznaczony Aplikacje pisane są z użyciem określonego słownictwa i składni, nazywanych Językiem programowania RAPID. Język programowania RAPID zawiera instrukcje w języku angielskim, umożliwiające poruszanie robota, ustawianie danych wyjściowych i odczytywanie danych wejściowych. Zawiera także instrukcje umożliwiające podejmowanie decyzji, powtarzanie innych instrukcji, decydowanie o strukturze programu, komunikację z operatorem systemu i inne. 10


11 2. Program RobotStudio RobotStudio to aplikacja komputerowa do tworzenia, programowania i symulowania pracy gniazd robotów bez podłączenia do urządzenia. Oprogramowanie RobotStudio dostępne jest w wersji pełnej, niestandardowej i minimalnej. Instalacja minimalna wykorzystywana jest podczas pracy w trybie online sterownika, jako uzupełnienie panelu FlexPendant. Pełna instalacja udostępnia zaawansowane narzędzia do symulacji i programowania. Na Rys. 2.1 przedstawiono okno programu. Interfejs programu RobotStudio Wstążka Polecenia do selekcji, wyboru części, punktów, obiektów itp. Drzewko projektu Okno z komunikatami Opcje instrukcji ruchu Przeglądarka/ wyszukiwarka bibliotek komponentów Rys. 2.1 okno programu RobotStudio poniżej opisano podstawowe polecenia, narzędzia i okna ułatwiające orientacje w programie. Rys. 2.2 wstążka programu Robot studio 11
12 Tab. 2-1 karty z poleceniami w RobotStudio (Rys. 2.2) karta 1 File 2 Home 3 Modeling 4 Simulation 5 Controller 6 RAPID opis Zawiera opcje umożliwiające tworzenie nowej stacji, nowego system robota, połączenia z kontrolerem, zapis widoków stacji oraz opcje programu RobotStudio. Zawiera elementy sterujące niezbędne do budowy stacji, tworzenia systemów, programowanie ścieżek i umieszczenie elementów. Zawiera elementy sterujące do tworzenia i grupowania elementów, tworzenia pomiarów i operacji CAD. Zawiera elementy sterujące dla instalacji, konfiguracji, sterowania, monitorowania i nagrywania symulacji. Zawiera elementy sterujące do synchronizacji, konfiguracji i zadań kontrolera wirtualnego (VC). Zawiera także kontrole zarządzania prawdziwym kontrolerem. Zawiera zintegrowany edytor RAPID, wykorzystywane do edycji wszystkich zadań innych niż ruch robota. 7 Add-Ins Zawiera kontrolę dodatków PowerPacs. Na Rys. 2.3 opisano ustawienie instrukcji ruchu. Ustawienia te mają zastosowanie przy wstawianiu instrukcji ruchu i automatycznym tworzeniu ścieżki ruchu. Typ instrukcji Prędkość obszar narzędzie Układ współrzędnych Rys. 2.3 opcje instrukcji ruchu Tab. 2-2 opcje instrukcji ruchu typ instrukcji MoveJ szybki ruch złożony do punktu docelowego (trajektoria nieznana) MoveL interpolacja liniowa, ruch TCP odbywa się po linii prostej MoveC interpolacja kołowa, ruch TCP odbywa się po okręgu MoveAbsJ szybki ruch złożony bez zachowania reorientacji narzędzia, a punkt docelowy zdefiniowany jest położeniem osi MoveExtJ ruch dodatkowej osi nieposiadającej TCP prędkość v50 prędkość punktu TCP 50 mm/s vlin50 prędkość liniowa 50 mm/s vmax prędkość maksymalna vrot50 prędkość obrotu 50 o /s strefa fine dojazd do pozyji z zatrzymaniem 12





13 z0 dojazd do pozycji bez zatrzymania strefa 0mm z50 przejazd obok pozycji w odległości 50mm Nawigacja w programie Poniższa tabela (Tab. 2-3) zawiera sposoby poruszania się w programie za pomocą myszy i klawiatury. Tab. 2-3 nawigacja w RobotStudio działanie Użycie klawiatury/ kombinacji myszy opis Wybór elementu Obrót stacji Naciśnij klawisze CTRL + SHIFT + lewy przycisk myszy i przeciągnij myszą, aby obrócić stacji. Z 3-przyciskowej myszy można używać przycisków środkowy i prawy, zamiast kombinacji klawiszy. Przesunięcie widoku stacji Z 3-przyciskowej myszy można również użyć środkowego przycisku, zamiast kombinacji klawiatury Powiększanie widoku Powiększanie obszaru Wybór za pomocą okna 13
14 Schemat blokowy Import i ustawienie detalu na stole/ taśmociągu Wgranie programu do rzeczywistego robota utworzenie układu współrzędnych detalu Redefiniowanie układu współrzędnych detalu wygenerowanie trajektorii ruchu z uwzględnieniem odpowiedniej interpolacji i parametrów ruchu T N Uruchomienie programu i sprawdzenie poprawności działania N dodanie punktów początkowych i końcowych trajektorii Trajektoria poprawna? T Trajektoria poprawna? Koniec procesu 14




 to klikamy anuluj. Rys. 3.2 komunikat o braku biblioteki z taśmociągiem 3.")
15 3. Tworzenie programu do robota ABB w trybie offline za pomocą środowiska ABB RobotStudio na podstawie modelu CAD 3D 1. Importujemy model stanowiska do RobotStudio. Otworzyć Plik stanowisko.rspag wówczas otworzy się kreator w którym wybieramy next. Kolejne okno służy do wyboru ścieżki w której zapiszemy nasze stanowisko. Tworzymy własny folder i w polu Target folder podajemy jego Rys. 3.1 okno kreatora do rozpakowania projektu lokalizacje. Klikamy next. 2. W kolejnym oknie wybieramy RobotWare _2039, zaznaczamy pole Automaticly restore backup. Dwukrotnie klikamy next, po zakończeniu close. Jeżeli pojawi się komunikat (Rys. 3.2) to klikamy anuluj. Rys. 3.2 komunikat o braku biblioteki z taśmociągiem 3. Instalujemy narzędzie. Na karcie Documents wybieramy Browse->User Library znajdujemy pisak i przeciągamy do modelu lub dwukrotnie na niego klikamy klikamy (Rys. 3.3). Rys. 3.3 import narzędzia 15
 klikamy prawym klawiszem na pisak, wybieramy Attach to IRB 1600 na pytanie o aktualizacje pozycji narzędzia odpowiadamy twierdząco. Rys. 3.")
 klikamy prawym klawiszem na ramka, wybieramy Position->Set Position (Rys. 3.5) w okienku Set Position wpisujemy (Rys. 3.5) np.")
. Rys. 3.5 definiowanie położenia części w bazowym układzie współrzędnych 7.")
, następnie definiujemy układ współrzędnych (dla ułatwienia włączamy przyciąganie do obiektów (Rys. 3.6 a) i punktów końcowych (b) klikamy na pole c potem na punk d.")
16 4. Montujemy narzędzie do robota. Na drzewku projektu (karta Layout) klikamy prawym klawiszem na pisak, wybieramy Attach to IRB 1600 na pytanie o aktualizacje pozycji narzędzia odpowiadamy twierdząco. Rys. 3.4 montowanie narzędzia do robota 5. Importujemy wcześniej przygotowaną część. Na karcie Documents wybieramy Browse->User Library->detale i przeciągamy ramka 6. Umieszczamy część na końcu taśmy. Na drzewku projektu (karta Layout) klikamy prawym klawiszem na ramka, wybieramy Position->Set Position (Rys. 3.5) w okienku Set Position wpisujemy (Rys. 3.5) np. X:900, Y:720, Z:850 (są to współrzędne położenia części w bazowym układzie współrzędnych) klikamy Apply a następnie Close. Pozycje można też ustawić ręcznie w tym celu klikamy lewym klawiszem na ramka następnie na ikonkę Move (Rys. 3.5). Rys. 3.5 definiowanie położenia części w bazowym układzie współrzędnych 7. Tworzymy układ współrzędnych obiektu (workobject). Wybieramy Frame from Three Points (Rys. 3.7 A), następnie definiujemy układ współrzędnych (dla ułatwienia włączamy przyciąganie do obiektów (Rys. 3.6 a) i punktów końcowych (b) klikamy na pole c potem na punk d. Analogicznie definiujemy pozostałe punkty (punkt na osi X oraz punkt na płaszczyźnie XY), klikamy Create (Rys. 3.7). Prawidłowy układ współrzędnych ma oś Z skierowaną w górę (Rys. 3.7 C). Na drzewku projektu Klikamy prawym klawiszem na powstały Frame_x i wybieramy Convert Frame to Workobject. Zmieniamy nazwę Workobect na np. detal (karta Paths&Targets-> Workobject_x). 16
 i narzędzie (Tool) Rys. 3.8 a.")
 i klikamy Create. b a c d Rys. 3.")
 definiujących ścieżkę ruchu w tym celu")
.")
17 a b c e d h g f Rys. 3.6 definiowanie układu współrzędnych obiektu roboczego (części) C A B Rys. 3.7 tworzenie workobectu obiektu roboczego (części) 8. Tworzymy ścieżkę. Ustawiamy właściwy układ współrzędnych części (Workobject) i narzędzie (Tool) Rys. 3.8 a. Wybieramy Auto Path (b), klikamy na krawędzie i tworzymy trajektorię zamkniętą klikamy na pierwszy punkt (c) następnie na krawędzie wzdłuż których ma poruszać się robot. Wybieramy interpolacje kołową (d) i klikamy Create. b a c d Rys. 3.8 automatyczne tworzenie trajektorii 9. Sprawdzamy orientację narzędzia we wszystkich pozycjach (targetach, celach) definiujących ścieżkę ruchu w tym celu zaznaczamy wszystkie targety, klikamy prawym klawiszem i wybieramy View Tool at Target (Rys. 3.9 a). jeśli orientacja narzędzia jest podobna do Rys. 3.9 to dostosowujemy orientacje narzędzia do np. pierwszej pozycji (celu). Zaznaczamy wszystkie Targety z wyjątkiem pierwszego klikamy prawym klawiszem i wybieramy Modyfy Target->Align 17
 a następnie klikamy na pierwszy Target z listy (d) i klikamy Apply. a c b d Rys. 3.")
.")

 potwierdzamy powstanie nowego celu (Rys. 3.11 a).")
18 Target Orientation. Wybieramy wyrównanie (Align Axis) osi X i blokujemy oś Z (Rys. 3.9 d). Klikamy na pole Reference (c) a następnie klikamy na pierwszy Target z listy (d) i klikamy Apply. a c b d Rys. 3.9 dostosowanie orientacji narzędzia 10. Ustawiamy konfigurację robota. Klikamy prawym klawiszem na utworzonej ścieżce i wybieramy Configurations->Auto Configuration (Rys a). W oknie wskazujemy konfiguracje w której wszystkie liczby są najbliższe zeru (b), klikamy Apply. Robot powinien zrealizować trajektorie, w przypadku problemów wybieramy Reset Configuration i powtarzamy ten krok wybierając inną konfigurację. b a Rys ustawienie konfiguracji robota 11. Tworzymy cel początkowy trajektorii. Zaznaczamy pierwszą instrukcje ruchu i tworzymy jej kopię (kombinacja klawiszy CTRL+C, CTRL+V) potwierdzamy powstanie nowego celu (Rys a). Zmieniamy nazwę celu np. na poczatkowy klikamy prawym klawiszem i wybieramy opcje Modyfy Target->Offset Position (b) i odsuwamy nasz cel w górę (np. o -50 [mm]) wzdłuż osi Z (c). Wykrzyknik przy targecie oznacza konieczność wybrania konfiguracji robota przy targecie. Można powtórzyć punkt
 instrukcji")
 i przesuwamy na początek i koniec ścieżki (Rys.")

.")

19 a c b Rys tworzenie punktów początkowych ścieżki 12. Tworzymy kopię (kombinacja klawiszy CTRL+C, CTRL+V) instrukcji ruchu do celu początkowego (np. MoveL początkowy) i przesuwamy na początek i koniec ścieżki (Rys. 3.12) nie tworzymy nowego celu (Rys a wybieramy nie). Rys ścieżka ruchu z punktem początkowym i końcowym 13. Tworzymy pozycję domową robota (karta Layout->IRB 1600 klikamy prawym klawiszem i wybieramy Jump Home (Rys a). Wybieramy bazowy układ współrzędnych wobj0 (b), modyfikujemy instrukcje ruchu na interpolacje przegubową MoveJ dodatkowo określamy prędkość i strefę (c), klikamy na Teach Instruction (d). 19



.")
20 d b a c Rys tworzenie pozycji domowej robota 14. Zmieniamy nazwę celu definiującego pozycje domową robota. Wykonujemy kopię instrukcji ruchu do pozycji domowej i przesuwamy ją na początek ścieżki (Rys. 3.14). Rys kompletna ścieżka ruchu 15. Tworzymy program w języku RAPID. Przechodzimy do karty RAPID i usuwamy poprzednie programy (Delete Program). Następnie tworzymy nowy moduł (New Module), wpisujemy nazwę i klikamy OK (Rys. 3.15). 20


.")
21 Rys tworzenie programu w języku RAPID 16. Przechodzimy do karty Home klikamy prawym klawiszem na nazwę naszej stacji i wybieramy Synchronize to RAPID (Rys. 3.17), w oknie wybieramy synchronizacje do modułu utworzonego w punkcie poprzednim (Rys. 3.16). Klikamy OK Rys wybór modułu zawierającego program 21

 oznacza procedurę zawierającą trajektorię ruch po ścieżce.")
22 Rys synchronizacja programu 17. Modyfikujemy program w RAPID. Przechodzimy do karty RAPID, otwieramy moduł do którego wysłaliśmy nasz program w poprzednim punkcie (Rys a) i przed ostatnią komendą (ENDMODULE przy końcu modułu) dopisujemy (c): PROC main() Path_10; endproc ENDMODULE gdzie Patch_10 (b) oznacza procedurę zawierającą trajektorię ruch po ścieżce. Zatwierdzamy zmiany przyciskiem Apply (d). d a b c Rys program w RAPID 22





23 4. Uruchomienie programu na rzeczywistym robocie 1. Ustawiamy statyczny adres IP komputera: , maska podsieci: , Brama domyślna: W celu ułatwienia klikamy prawym klawiszem na IP statyczny.cmd i wybieramy Uruchom jako administrator (Rys. 4.1). Rys. 4.1 konfiguracja ustawień sieciowych 2. Uruchamiamy kontroler robota w trybie ręcznym ze zmniejszoną prędkością (Rys. 4.2). A B Tryb ręczny ze zmniejszoną prędkością B Tryb pracy automatyczny Tryb ręczny z maksymalną prędkością C C Rys. 4.2 kontroler robota 3. Nawiązujemy połączenie z robotem. W RobotStudio przechodzimy do karty Controller, rozwijamy Add Controller i wybieramy on na drzewku pojawił się nowy kontroler (Rys. 4.3). 23





")
24 Rys. 4.3 dodawanie kontrolera do RobotStudio 4. Wczytujemy program (program w języku RAPID, dane narzędzia itp.) do kontrolera robota. Zaznaczamy rzeczywisty kontroler (Rys. 4.4 A), klikamy na Request Write Access (B) następnie wciskamy Grant na rzeczywistym teach pendancie (C) co zezwala na dostęp do kontrolera. B A C Rys. 4.4 nawiązywanie komunikacji z rzeczywistym robotem 5. Zapisujemy program z wirtualnego kontrolera do własnego katalogu (który można teraz utworzyć) znajdującego się w folderze: D:\Student ABB\ (Rys. 4.5) Rys. 4.5 zapis programu z wirtualnego kontrolera 24

 na")

.")
, usuwamy wszystkie zbędne")

25 6. Ładujemy poprzednio zapisany program do kontrolera robota. Klikamy prawym klawiszem na T1_ROB i wybieramy Load Program (Rys. 4.6 A), potwierdzamy chęć zmiany programu (B). Potwierdzamy komunikat o zmianie układu współrzędnych obiektu (C) na rzeczywistym kontrolerze. A B C Rys. 4.6 ładowanie programu do rzeczywistego kontrolera 7. Przejmujemy kontrolę nad robotem za pomocą rzeczywistego teach pendanta. Klikamy przycisk Revoke (Rys. 4.7). Przylkejamy wcześniej otrzymaną kartkę z wzorcową trajektorią do taśmy (można też użyć czystej kartki formatu A4), usuwamy wszystkie zbędne przedmioty z taśmy i obszaru pracy robota. Usuwamy komunikaty o przerwaniu obwodu bezpieczeństwa. Każdorazowe naruszeenie przestrzenie między barierami bezpieczeństwa powoduje awaryjne zatrzymanie robota. Rys. 4.7 przygotowanie robota do sterowania ręcznego 25
, wybieramy Jogging (C), w następnym oknie sprawdzamy czy poruszamy sią bazowym układzie współrzędnych wobj0 (G), wciskamy Go To (D), w następnym oknie wciskamy domowa naciskamy przycisk")

26 8. Ustawiamy robota w pozycji początkowej (domowej). Naciskamy na logo ABB (Rys. 4.8 B), wybieramy Jogging (C), w następnym oknie sprawdzamy czy poruszamy sią bazowym układzie współrzędnych wobj0 (G), wciskamy Go To (D), w następnym oknie wciskamy domowa naciskamy przycisk zezwalający na pracę w trybie ręcznym (A), następnie trzymamy przycisk GO to (D) do czasu zatrzymania robota. Zamykamy okno. W razie niebezpieczeństwa kolizji robota należy zatrzymać poprzez puszczenie przycisku Go to lub przerwanie obwodu bezpieczeństwa. B C G D F A E Rys. 4.8 ustawienie robota w pozycji domowej 9. Definiujemy układ współrzędnych detalu. Odbezpieczamy pisak, naciskamy Menu Quickset Rys. 4.9 A) następnie przycisk menu urządzeń mechanicznych (B) zmieniamy Aktywny work object" na detal (C), Active tool na pisak (D). 26



 a następnie Show Data (C), w kolejnym oknie")
27 B C D A Rys. 4.9 zmiana aktywnego Work objectu i narzędzia 10. Podobnie jak w punkcie 8 dojeżdżamy do pozycji początkowy z tym że zatrzymujemy ruch wtedy gdy pisak będzie niebezpiecznie blisko taśmy. Zwracamy uwagę czy poruszamy się we właściwym układzie współrzędnych i czy wybrano właściwe narzędzie (Rys. 4.10). Rys dojazd do pozycji początkowej trajektorii 11. Redefiniujemy Workobect detalu. Naciskamy na logo ABB następnie Program Data (Rys A). W kolejnym oknie naciskamy wobjdata (B) a następnie Show Data (C), w kolejnym oknie wybieramy układ który chcemy zmienić, wciskamy edit->define (D). W kolejnym oknie wybieramy User method: 3 points (E). 27




.")
28 A B C D E Rys definiowanie Work objectu Dojeżdżamy do pierwszego punktu User Point X 1 tak aby pisak dotykał kartki (Rys. 4.13) następnie naciskamy Modyfy Position podobnie definiujemy pozostałe dwa punkty. Ważne jest poprawne zdefiniowanie osi tak aby były one zgodne z wirtualnym stanowiskiem (Rys. 4.12). Po zdefiniowaniu punktów wciskamy ok. Rys work object w wirtualnym stanowisku 28

. Potwierdzamy naszą decyzję. A B Rys. 4.")
 ustawiamy prędkość robota na 5% i trzymając przycisk zezwalający na pracę w trybie ręcznym (Rys. 4.")

29 Rys work object w rzeczywistym stanowisku 12. Uruchamiamy program w trybie ręcznym. Naciskamy na logo ABB->Production Window naciskamy T1_ROB (Rys A) następnie ustawiamy wskaźnik produkcji na początku procedury (przechodzimy do początku programu) PP to Main (B). Potwierdzamy naszą decyzję. A B Rys uruchamianie programu W pierwszym wykonaniu programu za pomocą przycisków (Rys A) ustawiamy prędkość robota na 5% i trzymając przycisk zezwalający na pracę w trybie ręcznym (Rys. 4.8 A) i naciskamy Play (Rys B). Robot wykonuje program do czasu zwolnienia przycisku zezwalającego na pracę, naciśnięcia przycisku stop lub przerwania obwodu bezpieczeństwa. Po przerwaniu pracy może być konieczne naciśnięcie PP to Main. Po poprawnym wykonaniu programu prędkość pracy można zwiększyć. A B C Rys kontrola wykonywania programu 29
 dzięki temu zapisujemy wszystkie pliki użyte w projekcie co umożliwia kontynuacje pracy na innym komputerze.")
. Taka aplikacje służy do demonstracji działania stanowiska. A B C Rys.")
. Dodatkowo możemy określić długość rejestrowanej trasy w polu Trace length. Na karcie Alerts możemy określić alarmy w przypadku np.")
30 5. Dodatek Zapisywanie stanowiska Naciskamy File->Share a następnie Pack and Go (Rys. 5.1 A) dzięki temu zapisujemy wszystkie pliki użyte w projekcie co umożliwia kontynuacje pracy na innym komputerze. Opcja Save Station as Viewer (B) pozwala na zapisanie symulacji w postaci aplikacji (bez symulacji). Zapis symulacji działania aplikacji robota umożliwia opcja Record to Viewer (C). Taka aplikacje służy do demonstracji działania stanowiska. A B C Rys. 5.1 okno eksportu projektu Śledzenie punktu TCP narzędzia Na karcie Simulation klikamy na Monitor w oknie Simulation Monitor zaznaczamy Enable TCP Trace (Rys. 5.2). Dodatkowo możemy określić długość rejestrowanej trasy w polu Trace length. Na karcie Alerts możemy określić alarmy w przypadku np. przekroczenia prędkości czy przyspieszenia punktu TCP narzędzia. Funkcje ta jest przydatna do analizy ścieżki ruchu. Rys. 5.2 wyświetlanie trasy punktu TCP 30
 następnie wybieramy Default Layout. A Rys. 5.")
31 Przywrócenie domyślnego interfejsu Klikamy na menu A (Rys. 5.3) następnie wybieramy Default Layout. A Rys. 5.3 przywrócenie domyślnego interfejsu programu Aktualizacja liczników obrotu osi W tej sekcji opisano sposób wykonywania zgrubnej kalibracji poszczególnych osi robota, tzn. aktualizacji wartości liczników obrotów w odniesieniu do poszczególnych osi za pomocą panelu FlexPendant. Wybieramy tryb ruchu oś po osi następnie przesuwamy ręcznie robota tak, aby oznaczenia kalibracyjne znalazły się w obszarach tolerancji (Rys Rys. 5.5). Rys. 5.4 oznaczenia kalibracyjne osi 1 i 2 31


32 Rys. 5.5 oznaczenia kalibracyjne osi 3-6 Wybieramy menu ABB-> Calibration i dalej postępujemy zgodnie z Rys Rys. 5.9 Rys. 5.6 kalibracja 1 32


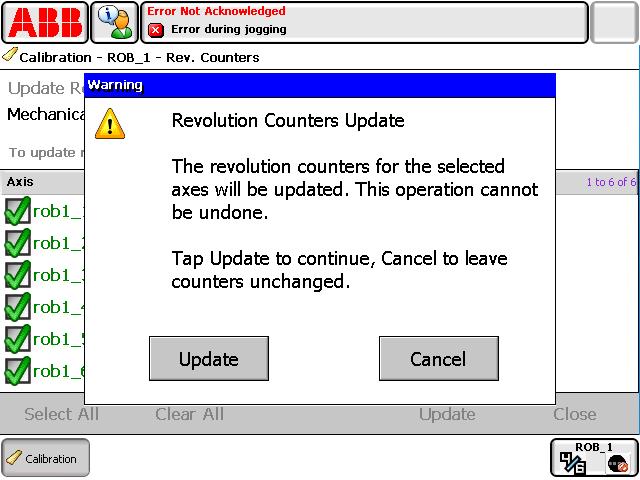
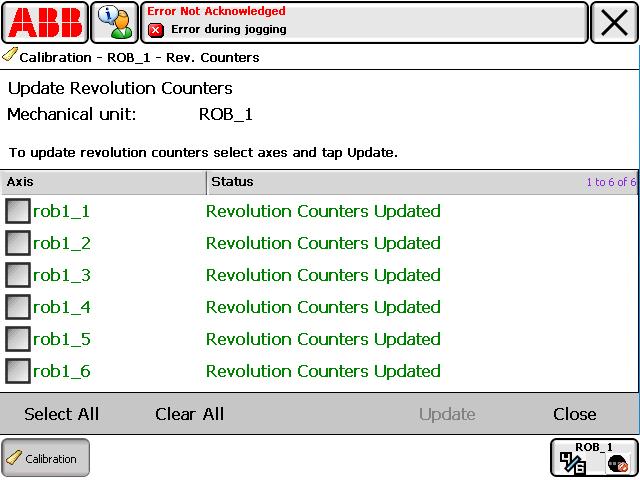
33 Rys. 5.7 kalibracja 2 Rys. 5.8 wybór osi Rys. 5.9 prawidłowa kalibracja W celu uniknięcia konieczności ustawiania osi we wskazanych znacznikach można dopisać instrukcję ruchu: MoveAbsJ [[0,0,0,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]]\NoEOffs, v1000, z50, Tool0; i umieścić ją na końcu programu. W ten sposób oznaczenia kalibracyjne znajdą się w obszarach tolerancji 33
 wybierz metodę. 6. Wybierz liczbę punktów podejścia. Zazwyczaj wystarczają 4 punkty.")
34 Definiowanie narzędzia 1. W menu ABB dotknij opcji Jogging 2. Dotknij opcji Tool, aby wyświetlić listę dostępnych narzędzi. 3. Wybierz narzędzie, które chcesz zdefiniować. 4. W menu Edit dotknij opcji Define W wyświetlonym oknie dialogowym (Rys. 5.11) wybierz metodę. 6. Wybierz liczbę punktów podejścia. Zazwyczaj wystarczają 4 punkty. Jeśli wybranych zostanie kilka punktów, w celu uzyskania bardziej precyzyjnego wyniku, wszystkie z nich należy wybierać ostrożnie. Rys definicja narzędzia Rys punkty podejścia Tab. 5-1 definiowanie punktu TCP Działanie 1 Przesuń robota na odpowiednią pozycję, A, dla pierwszego punktu podejścia. 2 Dotknij opcji Modify Position, aby zdefiniować punkt. 3 Powtórz kroki 1 i 2 dla każdego punktu podejścia, który ma zostać zdefiniowany dla pozycji B, C i D (Rys. 5.11). 4 Jeśli wykorzystywana jest metoda TCP & Z lub TCP & Z, X, konieczne jest także zdefiniowanie orientacji. 5 Jeśli z jakiegoś powodu konieczne jest powtórzenie procedury kalibracyjnej opisanej w krokach 1 4, dotknij opcji Positions, a następnie Reset All Informacje Za pomocą niewielkich ruchów precyzyjnie umieść końcówkę narzędzia jak najbliżej punktu odniesienia W celu uzyskania jak najlepszych wyników, odsuń robota od stałego punktu geograficznego. Sama zmiana orientacji narzędzia nie zapewni wystarczających wyników. 34
35 6. Literatura IRB1600 Data sheet Instrukcja obsługi IRC5 z panelem FlexPendant (oznaczenie dokumentu: 3HAC Zmiana: N) Operating manual RobotStudio (Document ID: 3HAC Revision: P) Instrukcja produktu IRB /1.45 type A (Oznaczenie dokumentu: 3HAC Zmiana: G) 35
Rys. 18a). Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.
. Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.") kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki
 Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
Kalibracja robotów przemysłowych
 Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
Instrukcja importu dokumentów z programu Fakt do programu Płatnik 5.01.001
 1 Instrukcja importu dokumentów z programu Fakt do programu Płatnik 5.01.001 I. EKSPORT DANYCH Z PROGRAMU FAKT DO PŁATNIKA...2 I.1. WYSYŁANIE DEKLARACJI Z PROGRAMU FAKT....2 I.2. KATALOGI I ŚCIEŻKI DOSTĘPU....2
1 Instrukcja importu dokumentów z programu Fakt do programu Płatnik 5.01.001 I. EKSPORT DANYCH Z PROGRAMU FAKT DO PŁATNIKA...2 I.1. WYSYŁANIE DEKLARACJI Z PROGRAMU FAKT....2 I.2. KATALOGI I ŚCIEŻKI DOSTĘPU....2
PikoCNC skróty klawiaturowe
 PikoCNC skróty klaw... Copyright 2017 PPHU ELCOSIMO 1 PikoCNC skróty klawiaturowe wersja 1.1 2017.03.25 PikoCNC skróty klaw... Copyright 2017 PPHU ELCOSIMO 2 1. Program główny Skróty podstawowe TAB TAB+SHIFT
PikoCNC skróty klaw... Copyright 2017 PPHU ELCOSIMO 1 PikoCNC skróty klawiaturowe wersja 1.1 2017.03.25 PikoCNC skróty klaw... Copyright 2017 PPHU ELCOSIMO 2 1. Program główny Skróty podstawowe TAB TAB+SHIFT
Robot EPSON SCARA T3-401S
 Robot EPSON SCARA T3-401S 1 Napędy robota wykorzystują silniki AC, a pomiar położenia realizowany jest za pomocą enkoderów przyrostowych. 2 3 4 Przebieg ćwiczenia: Celem ćwiczenia jest zaznajomienie się
Robot EPSON SCARA T3-401S 1 Napędy robota wykorzystują silniki AC, a pomiar położenia realizowany jest za pomocą enkoderów przyrostowych. 2 3 4 Przebieg ćwiczenia: Celem ćwiczenia jest zaznajomienie się
Kultywator rolniczy - dobór parametrów sprężyny do zadanych warunków pracy
 Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium 6 Kultywator rolniczy - dobór parametrów sprężyny do zadanych warunków pracy Opis obiektu symulacji Przedmiotem
Metody modelowania i symulacji kinematyki i dynamiki z wykorzystaniem CAD/CAE Laboratorium 6 Kultywator rolniczy - dobór parametrów sprężyny do zadanych warunków pracy Opis obiektu symulacji Przedmiotem
Kopiowanie przy użyciu szyby skanera. 1 Umieść oryginalny dokument na szybie skanera stroną zadrukowaną skierowaną w dół, w lewym, górnym rogu.
 Skrócony opis Kopiowanie Kopiowanie Szybkie kopiowanie 3 Naciśnij przycisk na panelu operacyjnym 4 Po umieszczeniu dokumentu na szybie skanera dotknij opcji Zakończ zadanie, aby powrócić do ekranu głównego.
Skrócony opis Kopiowanie Kopiowanie Szybkie kopiowanie 3 Naciśnij przycisk na panelu operacyjnym 4 Po umieszczeniu dokumentu na szybie skanera dotknij opcji Zakończ zadanie, aby powrócić do ekranu głównego.
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
ActionFX oprogramowanie do sterowania efektami platform i kin 7D V1.0.1
 Instrukcja obsługi ActionFX oprogramowanie do sterowania efektami platform i kin 7D V1.0.1 1 ActionFX to zaawansowane oprogramowanie umożliwiające sterowanie platformami efektowymi i efektami w kinach
Instrukcja obsługi ActionFX oprogramowanie do sterowania efektami platform i kin 7D V1.0.1 1 ActionFX to zaawansowane oprogramowanie umożliwiające sterowanie platformami efektowymi i efektami w kinach
Ustalanie dostępu do plików - Windows XP Home/Professional
 Ustalanie dostępu do plików - Windows XP Home/Professional Aby edytować atrybuty dostępu do plikow/ katalogow w systemie plików NTFS wpierw sprawdź czy jest Wyłączone proste udostępnianie czyli przejdź
Ustalanie dostępu do plików - Windows XP Home/Professional Aby edytować atrybuty dostępu do plikow/ katalogow w systemie plików NTFS wpierw sprawdź czy jest Wyłączone proste udostępnianie czyli przejdź
Compas 2026 Vision Instrukcja obsługi do wersji 1.07
 Compas 2026 Vision Instrukcja obsługi do wersji 1.07 1 2 Spis treści Integracja...5 1.Compas 2026 Lan...5 Logowanie...7 Użytkownicy...8 Raporty...10 Tworzenie wizualizacji Widoki...12 1.Zarządzanie widokami...12
Compas 2026 Vision Instrukcja obsługi do wersji 1.07 1 2 Spis treści Integracja...5 1.Compas 2026 Lan...5 Logowanie...7 Użytkownicy...8 Raporty...10 Tworzenie wizualizacji Widoki...12 1.Zarządzanie widokami...12
Utworzenie aplikacji mobilnej Po uruchomieniu Visual Studio pokazuje się ekran powitalny. Po lewej stronie odnośniki do otworzenia lub stworzenia
 Utworzenie aplikacji mobilnej Po uruchomieniu Visual Studio pokazuje się ekran powitalny. Po lewej stronie odnośniki do otworzenia lub stworzenia nowego projektu (poniżej są utworzone projekty) Po kliknięciu
Utworzenie aplikacji mobilnej Po uruchomieniu Visual Studio pokazuje się ekran powitalny. Po lewej stronie odnośniki do otworzenia lub stworzenia nowego projektu (poniżej są utworzone projekty) Po kliknięciu
Rys. 1. Brama przesuwna do wykonania na zajęciach
 Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
Product Update 2013. Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6
 Product Update 2013 Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6 Str. 2 / 15 Funkcjonalność ADR dla przemienników PF 750 Temat: Celem niniejszego ćwiczenia, jest zapoznanie
Product Update 2013 Funkcjonalność ADR dla przemienników Częstotliwości PowerFlex 750 oraz 525 6 Str. 2 / 15 Funkcjonalność ADR dla przemienników PF 750 Temat: Celem niniejszego ćwiczenia, jest zapoznanie
Instalacja MUSB2232FKA w systemie Windows 7
 Instalacja MUSB2232FKA w systemie Windows 7 1. Instalację przeprowadziłem w systemie Windows 7 Home Premium wersja 32 bity. System pracował ze standardowymi ustawieniami kontroli konta użytkownika. Wkładamy
Instalacja MUSB2232FKA w systemie Windows 7 1. Instalację przeprowadziłem w systemie Windows 7 Home Premium wersja 32 bity. System pracował ze standardowymi ustawieniami kontroli konta użytkownika. Wkładamy
Windows 10 - Jak uruchomić system w trybie
 1 (Pobrane z slow7.pl) Windows 10 - Jak uruchomić system w trybie awaryjnym? Najprostszym ze sposobów wymuszenia na systemie przejścia do trybu awaryjnego jest wybranie Start a następnie Zasilanie i z
1 (Pobrane z slow7.pl) Windows 10 - Jak uruchomić system w trybie awaryjnym? Najprostszym ze sposobów wymuszenia na systemie przejścia do trybu awaryjnego jest wybranie Start a następnie Zasilanie i z
Słowa kluczowe Sterowanie klawiaturą, klawiatura, klawisze funkcyjne, przesuwanie obiektów ekranowych, wydawanie poleceń za pomocą klawiatury
 Obsługa za pomocą klawiatury Różnego typu interfejsy wykorzystują różne metody reagowania i wydawania poleceń przez użytkownika. W środowisku graficznym najpopularniejsza jest niewątpliwie mysz i inne
Obsługa za pomocą klawiatury Różnego typu interfejsy wykorzystują różne metody reagowania i wydawania poleceń przez użytkownika. W środowisku graficznym najpopularniejsza jest niewątpliwie mysz i inne
BLENDER- Laboratorium 1 opracował Michał Zakrzewski, 2014 r. Interfejs i poruszanie się po programie oraz podstawy edycji bryły
 BLENDER- Laboratorium 1 opracował Michał Zakrzewski, 2014 r. Interfejs i poruszanie się po programie oraz podstawy edycji bryły Po uruchomieniu programu Blender zawsze ukaże się nam oto taki widok: Jak
BLENDER- Laboratorium 1 opracował Michał Zakrzewski, 2014 r. Interfejs i poruszanie się po programie oraz podstawy edycji bryły Po uruchomieniu programu Blender zawsze ukaże się nam oto taki widok: Jak
INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4
 INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4 Quatrovent Morska 242 Gdynia Tel. +48 58 3505995, fax +48 58 6613553 1 Spis treści I. Ustawienie orientacji wentylatorów...3 A. Za pomocą regulatora
INSTRUKCJA UZUPEŁNIAJĄCA DO CENTRAL DUPLEX ZE STEROWANIEM RD4 Quatrovent Morska 242 Gdynia Tel. +48 58 3505995, fax +48 58 6613553 1 Spis treści I. Ustawienie orientacji wentylatorów...3 A. Za pomocą regulatora
1. Dodawanie integracji
 08-01-19 Spis treści: 1. Dodawanie integracji... 1 2. Dodawanie grafik... 3 3. Definicje alarmów... 5 4. Szablony... 7 5. Edycja grafik... 10 5.1. Rozmieszczanie przycisków otwierających grafiki... 11
08-01-19 Spis treści: 1. Dodawanie integracji... 1 2. Dodawanie grafik... 3 3. Definicje alarmów... 5 4. Szablony... 7 5. Edycja grafik... 10 5.1. Rozmieszczanie przycisków otwierających grafiki... 11
Windows W celu dostępu do i konfiguracji firewall idź do Panelu sterowania -> System i zabezpieczenia -> Zapora systemu Windows.
 Bezpieczeństwo Systemów Informatycznych Firewall (Zapora systemu) Firewall (zapora systemu) jest ważnym elementem bezpieczeństwa współczesnych systemów komputerowych. Jego główną rolą jest kontrola ruchu
Bezpieczeństwo Systemów Informatycznych Firewall (Zapora systemu) Firewall (zapora systemu) jest ważnym elementem bezpieczeństwa współczesnych systemów komputerowych. Jego główną rolą jest kontrola ruchu
Instrukcja konfiguracji programu Fakt z modułem lanfakt
 Instrukcja konfiguracji programu Fakt z modułem lanfakt (wersja 2016.04) Fakt Dystrybucja Sp. z o. o. 81-552 Gdynia, ul. Wielkopolska 21/2 www.fakt.com.pl serwis@fakt.com.pl Spis treści 1.Moduł lanfakt...
Instrukcja konfiguracji programu Fakt z modułem lanfakt (wersja 2016.04) Fakt Dystrybucja Sp. z o. o. 81-552 Gdynia, ul. Wielkopolska 21/2 www.fakt.com.pl serwis@fakt.com.pl Spis treści 1.Moduł lanfakt...
Istnieją trzy sposoby tworzenia kopii zapasowej na panelu Comfort:
 Istnieją trzy sposoby tworzenia kopii zapasowej na panelu Comfort: - automatyczna kopia zapasowa - kopia zapasowa / przywracanie z użyciem karty pamięci - kopia zapasowa / przywracanie z użyciem programu
Istnieją trzy sposoby tworzenia kopii zapasowej na panelu Comfort: - automatyczna kopia zapasowa - kopia zapasowa / przywracanie z użyciem karty pamięci - kopia zapasowa / przywracanie z użyciem programu
Laboratorium Maszyny CNC. Nr 4
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14. 1.2 Ustawienia wprowadzające. Auto CAD 14 1-1. Aby uruchomić AutoCada 14 kliknij ikonę
 Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
Instrukcja instalacji oraz konfiguracji sterowników. MaxiEcu 2.0
 Instrukcja instalacji oraz konfiguracji sterowników. MaxiEcu 2.0 Wersja instrukcji 1.0.1 1 SPIS TREŚCI 1. Sprawdzenie wersji systemu Windows... 3 2. Instalacja sterowników interfejsu diagnostycznego...
Instrukcja instalacji oraz konfiguracji sterowników. MaxiEcu 2.0 Wersja instrukcji 1.0.1 1 SPIS TREŚCI 1. Sprawdzenie wersji systemu Windows... 3 2. Instalacja sterowników interfejsu diagnostycznego...
Synchronizator plików (SSC) - dokumentacja
 - dokumentacja") SZARP http://www.szarp.org Synchronizator plików (SSC) - dokumentacja Wersja pliku: $Id: ssc.sgml 4420 2007-09-18 11:19:02Z schylek$ > 1. Witamy w programie SSC Synchronizator plików (SZARP Sync Client,
SZARP http://www.szarp.org Synchronizator plików (SSC) - dokumentacja Wersja pliku: $Id: ssc.sgml 4420 2007-09-18 11:19:02Z schylek$ > 1. Witamy w programie SSC Synchronizator plików (SZARP Sync Client,
Poradnik użytkownika pomoc techniczna
 Poradnik użytkownika pomoc techniczna Poradnik dotyczy komputerów z zainstalowanym systemem Windows 1 Spis treści I. POSTĘPOWANIE W PRZYPADKU PROBLEMÓW Z URUCHOMIENIEM APLIKACJI SUPERMAKLER... 3 1. JAVA
Poradnik użytkownika pomoc techniczna Poradnik dotyczy komputerów z zainstalowanym systemem Windows 1 Spis treści I. POSTĘPOWANIE W PRZYPADKU PROBLEMÓW Z URUCHOMIENIEM APLIKACJI SUPERMAKLER... 3 1. JAVA
Galileo v10 pierwszy program
 Notatka Aplikacyjna NA 03011PL Galileo v10 Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Podstawy... 3 2.1. Tworzenie nowego projektu... 3 2.2. Dodawanie pola tekstowego... 10 2.3. Przechodzenie
Notatka Aplikacyjna NA 03011PL Galileo v10 Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Podstawy... 3 2.1. Tworzenie nowego projektu... 3 2.2. Dodawanie pola tekstowego... 10 2.3. Przechodzenie
Expo Composer. www.doittechnology.pl 1. Garncarska 5 70-377 Szczecin tel.: +48 91 404 09 24 e-mail: info@doittechnology.pl. Dokumentacja użytkownika
 Expo Composer Dokumentacja użytkownika Wersja 1.0 www.doittechnology.pl 1 SPIS TREŚCI 1. O PROGRAMIE... 3 Wstęp... 3 Wymagania systemowe... 3 Licencjonowanie... 3 2. PIERWSZE KROKI Z Expo Composer... 4
Expo Composer Dokumentacja użytkownika Wersja 1.0 www.doittechnology.pl 1 SPIS TREŚCI 1. O PROGRAMIE... 3 Wstęp... 3 Wymagania systemowe... 3 Licencjonowanie... 3 2. PIERWSZE KROKI Z Expo Composer... 4
Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7
 5.0 5.3.3.5 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7 Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
5.0 5.3.3.5 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7 Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
Tablet bezprzewodowy QIT30. Oprogramowanie Macro Key Manager
 Tablet bezprzewodowy QIT30 Oprogramowanie Macro Key Manager Spis treści 1. Wprowadzenie... 3 2. Panel Sterowania - wprowadzenie... 4 3. Instalacja... 5 3.1 Jak stworzyć nowy profil... 5 3.2 Jak zmodyfikować
Tablet bezprzewodowy QIT30 Oprogramowanie Macro Key Manager Spis treści 1. Wprowadzenie... 3 2. Panel Sterowania - wprowadzenie... 4 3. Instalacja... 5 3.1 Jak stworzyć nowy profil... 5 3.2 Jak zmodyfikować
Cel ćwiczenia: Nabycie umiejętności poruszania się w przestrzeni programu Kuka.Sim Pro oraz zapoznanie się z biblioteką gotowych modeli programu.
 Roboty Przemysłowe - Programowanie robotów off-line 1 Oprogramowanie Kuka.SimPro Stworzenie stanowiska paletyzacji z elementów dostępnych w bibliotece Cel ćwiczenia: Nabycie umiejętności poruszania się
Roboty Przemysłowe - Programowanie robotów off-line 1 Oprogramowanie Kuka.SimPro Stworzenie stanowiska paletyzacji z elementów dostępnych w bibliotece Cel ćwiczenia: Nabycie umiejętności poruszania się
Instrukcja połączenia z programem Compas LAN i import konfiguracji
 Instrukcja połączenia z programem Compas LAN i import konfiguracji 1. Ustalamy ile komputerów będziemy wykorzystywać do użytkowania programów Compas LAN i EQU. Jeśli komputerów jest więcej niż jeden musimy
Instrukcja połączenia z programem Compas LAN i import konfiguracji 1. Ustalamy ile komputerów będziemy wykorzystywać do użytkowania programów Compas LAN i EQU. Jeśli komputerów jest więcej niż jeden musimy
SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-510L
 SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-510L Przed rozpoczęciem instalacji przygotuj wszystkie niezbędne elementy wymagane do poprawnej
SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-510L Przed rozpoczęciem instalacji przygotuj wszystkie niezbędne elementy wymagane do poprawnej
Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows Vista
 5.0 5.3.3.6 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows Vista Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
5.0 5.3.3.6 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows Vista Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
VComNet Podręcznik użytkownika. VComNet. Podręcznik użytkownika Wstęp
 VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit
 INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit W celu uruchomienia programów DOS na Windows 7 Home Premium 64 bit lub Windows 8/8.1 można wykorzystać programy DoxBox oraz D-Fend
INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit W celu uruchomienia programów DOS na Windows 7 Home Premium 64 bit lub Windows 8/8.1 można wykorzystać programy DoxBox oraz D-Fend
Rysunek 1: Okno timeline wykorzystywane do tworzenia animacji.
 Ćwiczenie 5 - Tworzenie animacji Podczas tworzenia prostej animacji wykorzystywać będziemy okno Timeline domyślnie ustawione na dole okna Blendera (Rys. 1). Proces tworzenia animacji polega na stworzeniu
Ćwiczenie 5 - Tworzenie animacji Podczas tworzenia prostej animacji wykorzystywać będziemy okno Timeline domyślnie ustawione na dole okna Blendera (Rys. 1). Proces tworzenia animacji polega na stworzeniu
Instrukcja konfiguracji programu Fakt z modułem lanfakt
 Instrukcja konfiguracji programu Fakt z modułem lanfakt (wersja 2012.07) Fakt Dystrybucja Sp. z o. o. 81-552 Gdynia, ul. Wielkopolska 21/2 www.fakt.com.pl serwis@fakt.com.pl Spis treści 1. Moduł lanfakt...
Instrukcja konfiguracji programu Fakt z modułem lanfakt (wersja 2012.07) Fakt Dystrybucja Sp. z o. o. 81-552 Gdynia, ul. Wielkopolska 21/2 www.fakt.com.pl serwis@fakt.com.pl Spis treści 1. Moduł lanfakt...
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel
 etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
T: Instalacja systemu Windows 2008 Serwer w maszynie wirtualnej VirtualBox.
 T: Instalacja systemu Windows 2008 Serwer w maszynie wirtualnej VirtualBox. Wstępna konfiguracja oprogramowania VirtualBox: Program VirtualBox zainstalowany jest w katalogu c:\programy\virtualbox. Po uruchomieniu
T: Instalacja systemu Windows 2008 Serwer w maszynie wirtualnej VirtualBox. Wstępna konfiguracja oprogramowania VirtualBox: Program VirtualBox zainstalowany jest w katalogu c:\programy\virtualbox. Po uruchomieniu
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Tworzenie bazy danych na przykładzie Access
 Tworzenie bazy danych na przykładzie Access Tworzenie tabeli Kwerendy (zapytania) Selekcja Projekcja Złączenie Relacja 1 Relacja 2 Tworzenie kwedend w widoku projektu Wybór tabeli (tabel) źródłowych Wybieramy
Tworzenie bazy danych na przykładzie Access Tworzenie tabeli Kwerendy (zapytania) Selekcja Projekcja Złączenie Relacja 1 Relacja 2 Tworzenie kwedend w widoku projektu Wybór tabeli (tabel) źródłowych Wybieramy
Lokalizacja jest to położenie geograficzne zajmowane przez aparat. Miejsce, w którym zainstalowane jest to urządzenie.
 Lokalizacja Informacje ogólne Lokalizacja jest to położenie geograficzne zajmowane przez aparat. Miejsce, w którym zainstalowane jest to urządzenie. To pojęcie jest używane przez schematy szaf w celu tworzenia
Lokalizacja Informacje ogólne Lokalizacja jest to położenie geograficzne zajmowane przez aparat. Miejsce, w którym zainstalowane jest to urządzenie. To pojęcie jest używane przez schematy szaf w celu tworzenia
Instrukcja obsługi programu CMS Dla rejestratorów HANBANG
 Instrukcja obsługi programu CMS Dla rejestratorów HANBANG 1. Wymagania sprzętowe: Minimalne wymagania sprzętowe: System operacyjny: Windows Serwer 2003 Standard Edition SP2 Baza danych: Mysql5.0 Procesor:
Instrukcja obsługi programu CMS Dla rejestratorów HANBANG 1. Wymagania sprzętowe: Minimalne wymagania sprzętowe: System operacyjny: Windows Serwer 2003 Standard Edition SP2 Baza danych: Mysql5.0 Procesor:
DARMOWA PRZEGLĄDARKA MODELI IFC
 www.bimvision.eu DARMOWA PRZEGLĄDARKA MODELI IFC BIM VISION. OPIS FUNKCJONALNOŚCI PROGRAMU. CZĘŚĆ I. Spis treści OKNO GŁÓWNE... 1 NAWIGACJA W PROGRAMIE... 3 EKRAN DOTYKOWY... 5 MENU... 6 ZAKŁADKA WIDOK....
www.bimvision.eu DARMOWA PRZEGLĄDARKA MODELI IFC BIM VISION. OPIS FUNKCJONALNOŚCI PROGRAMU. CZĘŚĆ I. Spis treści OKNO GŁÓWNE... 1 NAWIGACJA W PROGRAMIE... 3 EKRAN DOTYKOWY... 5 MENU... 6 ZAKŁADKA WIDOK....
Rys.1. Uaktywnianie pasków narzędzi. żądanych pasków narzędziowych. a) Modelowanie części: (standardowo widoczny po prawej stronie Przeglądarki MDT)
 Modelowanie części: (standardowo widoczny po prawej stronie Przeglądarki MDT)") Procesy i techniki produkcyjne Instytut Informatyki i Zarządzania Produkcją Wydział Mechaniczny Ćwiczenie 3 (1) Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2
Procesy i techniki produkcyjne Instytut Informatyki i Zarządzania Produkcją Wydział Mechaniczny Ćwiczenie 3 (1) Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2
Instalowanie VHOPE i plików biblioteki VHOPE
 Instalowanie VHOPE i plików biblioteki VHOPE Krok 1. Zainstaluj aplikację VHOPE Przed rozpoczęciem korzystania z materiałów prezentacyjnych znajdujących się na tym dysku USB należy zainstalować na komputerze
Instalowanie VHOPE i plików biblioteki VHOPE Krok 1. Zainstaluj aplikację VHOPE Przed rozpoczęciem korzystania z materiałów prezentacyjnych znajdujących się na tym dysku USB należy zainstalować na komputerze
SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-520L
 SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-520L Przed rozpoczęciem instalacji przygotuj wszystkie niezbędne elementy wymagane do poprawnej
SKRÓCONA INSTRUKCJA INSTALACJI MODEMU I KONFIGURACJA POŁĄCZENIA Z INTERNETEM NA WINDOWS 8 DLA AnyDATA ADU-520L Przed rozpoczęciem instalacji przygotuj wszystkie niezbędne elementy wymagane do poprawnej
Instrukcja połączenia z programem Compas LAN i import konfiguracji
 Instrukcja połączenia z programem Compas LAN i import konfiguracji 1. Ustalamy ile komputerów będziemy wykorzystywać do użytkowania programów Compas LAN i EQU. Jeśli komputerów jest więcej niż jeden musimy
Instrukcja połączenia z programem Compas LAN i import konfiguracji 1. Ustalamy ile komputerów będziemy wykorzystywać do użytkowania programów Compas LAN i EQU. Jeśli komputerów jest więcej niż jeden musimy
Obrabiarki CNC. Nr 10
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
Informatyka Arkusz kalkulacyjny Excel 2010 dla WINDOWS cz. 1
 Wyższa Szkoła Ekologii i Zarządzania Informatyka Arkusz kalkulacyjny 2010 dla WINDOWS cz. 1 Slajd 1 Slajd 2 Ogólne informacje Arkusz kalkulacyjny podstawowe narzędzie pracy menadżera Arkusz kalkulacyjny
Wyższa Szkoła Ekologii i Zarządzania Informatyka Arkusz kalkulacyjny 2010 dla WINDOWS cz. 1 Slajd 1 Slajd 2 Ogólne informacje Arkusz kalkulacyjny podstawowe narzędzie pracy menadżera Arkusz kalkulacyjny
Rys.1. Technika zestawiania części za pomocą polecenia WSTAWIAJĄCE (insert)
") Procesy i techniki produkcyjne Wydział Mechaniczny Ćwiczenie 3 (2) CAD/CAM Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2 jest opanowanie techniki budowy i wykorzystania
Procesy i techniki produkcyjne Wydział Mechaniczny Ćwiczenie 3 (2) CAD/CAM Zasady budowy bibliotek parametrycznych Cel ćwiczenia: Celem tego zestawu ćwiczeń 3.1, 3.2 jest opanowanie techniki budowy i wykorzystania
Podłączenie TV przez VPN na Samsung Smart VPN Online Access
 Podłączenie TV przez VPN na Samsung Smart VPN Online Access http://www.vpnonline.pl Co potrzebujemy: TV z możliwością podłączenia do Internetu i aplikacjami takimi jak ipla czy tvnplayer Notebook lub inny
Podłączenie TV przez VPN na Samsung Smart VPN Online Access http://www.vpnonline.pl Co potrzebujemy: TV z możliwością podłączenia do Internetu i aplikacjami takimi jak ipla czy tvnplayer Notebook lub inny
Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows XP
 5.0 5.3.3.7 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows XP Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
5.0 5.3.3.7 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows XP Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n
 Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n Uwaga! Nowa wersja oprogramowania oznaczona numerem 1.03v jest przeznaczona tylko dla routerów mających współpracować z modemem
Instrukcja wgrywania aktualizacji oprogramowania dla routera Edimax LT-6408n Uwaga! Nowa wersja oprogramowania oznaczona numerem 1.03v jest przeznaczona tylko dla routerów mających współpracować z modemem
R 3. Programowanie robota o 7 stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych. Instrukcja laboratoryjna
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Instrukcja laboratoryjna R 3 Programowanie robota o 7 stopniach swobody. Instrukcja dla studentów studiów dziennych. Przygotowała: dr inż.
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Instrukcja laboratoryjna R 3 Programowanie robota o 7 stopniach swobody. Instrukcja dla studentów studiów dziennych. Przygotowała: dr inż.
Informatyka Arkusz kalkulacyjny Excel 2010 dla WINDOWS cz. 1
 Wyższa Szkoła Ekologii i Zarządzania Informatyka Arkusz kalkulacyjny Excel 2010 dla WINDOWS cz. 1 Slajd 1 Excel Slajd 2 Ogólne informacje Arkusz kalkulacyjny podstawowe narzędzie pracy menadżera Arkusz
Wyższa Szkoła Ekologii i Zarządzania Informatyka Arkusz kalkulacyjny Excel 2010 dla WINDOWS cz. 1 Slajd 1 Excel Slajd 2 Ogólne informacje Arkusz kalkulacyjny podstawowe narzędzie pracy menadżera Arkusz
Dodanie strony aplikacji SAC do strefy intranetowej
 Opis konfiguracji ustawień sieci i przeglądarki dla potrzeb Statystycznej Aplikacji Centralnej (SAC) Aby móc poprawnie pracować w Statystycznej Aplikacji Centralnej musimy odpowiednio skonfigurować ustawienia
Opis konfiguracji ustawień sieci i przeglądarki dla potrzeb Statystycznej Aplikacji Centralnej (SAC) Aby móc poprawnie pracować w Statystycznej Aplikacji Centralnej musimy odpowiednio skonfigurować ustawienia
Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki
 Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki Ćwiczenie laboratoryjne 2 Temat: Modelowanie powierzchni swobodnych 3D przy użyciu programu Autodesk Inventor Spis treści 1.
Politechnika Warszawska Wydział Mechatroniki Instytut Automatyki i Robotyki Ćwiczenie laboratoryjne 2 Temat: Modelowanie powierzchni swobodnych 3D przy użyciu programu Autodesk Inventor Spis treści 1.
TURNINGPOINT KROKI DO URUCHOMIENIA TESTU NA PC
 TURNINGPOINT KROKI DO URUCHOMIENIA TESTU NA PC 1. Podłącz odbiornik 2. Uruchom TurningPoint 3. Sprawdź połączenie (Odbiornik i/lub ResponseWare) 4. Wybierz listę uczestników (opcjonalne) 5. Wybierz głosowanie
TURNINGPOINT KROKI DO URUCHOMIENIA TESTU NA PC 1. Podłącz odbiornik 2. Uruchom TurningPoint 3. Sprawdź połączenie (Odbiornik i/lub ResponseWare) 4. Wybierz listę uczestników (opcjonalne) 5. Wybierz głosowanie
Tworzenie nowego rysunku Bezpośrednio po uruchomieniu programu zostanie otwarte okno kreatora Nowego Rysunku.
 1 Spis treści Ćwiczenie 1...3 Tworzenie nowego rysunku...3 Ustawienia Siatki i Skoku...4 Tworzenie rysunku płaskiego...5 Tworzenie modeli 3D...6 Zmiana Układu Współrzędnych...7 Tworzenie rysunku płaskiego...8
1 Spis treści Ćwiczenie 1...3 Tworzenie nowego rysunku...3 Ustawienia Siatki i Skoku...4 Tworzenie rysunku płaskiego...5 Tworzenie modeli 3D...6 Zmiana Układu Współrzędnych...7 Tworzenie rysunku płaskiego...8
Instalacja programu na systemie vista/win7/win8/win10. Instrukcja dotyczy instalacji wszystkich programów ( na przykładzie Helios ).
.") Instalacja programu na systemie vista/win7/win8/win10. Instrukcja dotyczy instalacji wszystkich programów ( na przykładzie Helios ). Program Helios pomoc społeczna pracuje zarówno na systemach 32 i 64
Instalacja programu na systemie vista/win7/win8/win10. Instrukcja dotyczy instalacji wszystkich programów ( na przykładzie Helios ). Program Helios pomoc społeczna pracuje zarówno na systemach 32 i 64
Laboratorium Systemów Operacyjnych
 Laboratorium Systemów Operacyjnych Użytkownicy, Grupy, Prawa Tworzenie kont użytkowników Lokalne konto pozwala użytkownikowi na uzyskanie dostępu do zasobów lokalnego komputera. Konto domenowe pozwala
Laboratorium Systemów Operacyjnych Użytkownicy, Grupy, Prawa Tworzenie kont użytkowników Lokalne konto pozwala użytkownikowi na uzyskanie dostępu do zasobów lokalnego komputera. Konto domenowe pozwala
Zadanie 2. Tworzenie i zarządzanie niestandardową konsolą MMC
 Zadanie 2. Tworzenie i zarządzanie niestandardową konsolą MMC W tym zadaniu utworzymy niestandardową konsolę MMC. Będziemy dodawać, usuwać i zmieniać kolejność przystawek. Następnie przygotujemy konsolę
Zadanie 2. Tworzenie i zarządzanie niestandardową konsolą MMC W tym zadaniu utworzymy niestandardową konsolę MMC. Będziemy dodawać, usuwać i zmieniać kolejność przystawek. Następnie przygotujemy konsolę
Ćwiczenie 1: Pierwsze kroki
 Ćwiczenie 1: Pierwsze kroki z programem AutoCAD 2010 1 Przeznaczone dla: nowych użytkowników programu AutoCAD Wymagania wstępne: brak Czas wymagany do wykonania: 15 minut W tym ćwiczeniu Lekcje zawarte
Ćwiczenie 1: Pierwsze kroki z programem AutoCAD 2010 1 Przeznaczone dla: nowych użytkowników programu AutoCAD Wymagania wstępne: brak Czas wymagany do wykonania: 15 minut W tym ćwiczeniu Lekcje zawarte
Instrukcje dotyczące systemu Windows w przypadku drukarki podłączonej lokalnie
 Strona 1 z 5 Połączenia Instrukcje dotyczące systemu Windows w przypadku drukarki podłączonej lokalnie Przed instalacją oprogramowania drukarki do systemu Windows Drukarka podłączona lokalnie to drukarka
Strona 1 z 5 Połączenia Instrukcje dotyczące systemu Windows w przypadku drukarki podłączonej lokalnie Przed instalacją oprogramowania drukarki do systemu Windows Drukarka podłączona lokalnie to drukarka
Skrócona instrukcja konfiguracji połączeń sieciowych
 Xerox WorkCentre M118/M118i Skrócona instrukcja konfiguracji połączeń sieciowych 701P42716 W niniejszej instrukcji opisano: Poruszanie się po ekranach strona 2 Konfiguracja sieci za pomocą protokołu DHCP
Xerox WorkCentre M118/M118i Skrócona instrukcja konfiguracji połączeń sieciowych 701P42716 W niniejszej instrukcji opisano: Poruszanie się po ekranach strona 2 Konfiguracja sieci za pomocą protokołu DHCP
wpisujemy prawidłowe ustawienia dla naszej sieci lokalnej ustawienia
 Procedura uruchomienia współpracy pomiędzy systemem monitoringu Aparo opartym na rejestratorach serii AR a systemem automatyki budynkowej Fibaro dla centrali HC2 1. Podłączyć żądaną ilość kamer do rejestratora
Procedura uruchomienia współpracy pomiędzy systemem monitoringu Aparo opartym na rejestratorach serii AR a systemem automatyki budynkowej Fibaro dla centrali HC2 1. Podłączyć żądaną ilość kamer do rejestratora
Oprogramowanie Turning Point 5. Tryb AnyWhere (Test AnyWhere) Oprogramowanie Turning Point 5 Tryb AnyWhere Agraf Sp. z o.o. Nowe Sady 2, Łódź
 Oprogramowanie Turning Point 5 Tryb AnyWhere Agraf Sp. z o.o. Nowe Sady 2, Łódź") Oprogramowanie Turning Point 5 Tryb AnyWhere (Test AnyWhere) Spis treści Głosowanie Anywhere (w dowolnym oprogramowaniu)... 4 Kroki początkowe... 4 Sprawdzanie kanału łączności... 4 ZMIENIANIE KANAŁU NA
Oprogramowanie Turning Point 5 Tryb AnyWhere (Test AnyWhere) Spis treści Głosowanie Anywhere (w dowolnym oprogramowaniu)... 4 Kroki początkowe... 4 Sprawdzanie kanału łączności... 4 ZMIENIANIE KANAŁU NA
Instalacja programu:
 Instrukcja programu Konwerter Lido Aktualizacja instrukcji : 2012/03/25 INSTALACJA PROGRAMU:... 1 OKNO PROGRAMU OPIS... 3 DODANIE MODUŁÓW KONWERSJI... 3 DODANIE LICENCJI... 5 DODANIE FIRMY... 7 DODAWANIE
Instrukcja programu Konwerter Lido Aktualizacja instrukcji : 2012/03/25 INSTALACJA PROGRAMU:... 1 OKNO PROGRAMU OPIS... 3 DODANIE MODUŁÓW KONWERSJI... 3 DODANIE LICENCJI... 5 DODANIE FIRMY... 7 DODAWANIE
Poprzez dodanie silnika obrotowego przeprowadzić symulację pracy mechanizmu.
 W module Złożenie-ISO wykonać złożenie elementów mechanizmu jak poniżej Poprzez dodanie silnika obrotowego przeprowadzić symulację pracy mechanizmu. Utworzyć wizualizację pracy mechanizmu w postaci pliku.avi
W module Złożenie-ISO wykonać złożenie elementów mechanizmu jak poniżej Poprzez dodanie silnika obrotowego przeprowadzić symulację pracy mechanizmu. Utworzyć wizualizację pracy mechanizmu w postaci pliku.avi
ZESTAW LABORATORYJNY I ZESTAW FARMACEUTYCZNY : Instrukcja instalacji
 ZESTAW LABORATORYJNY I ZESTAW FARMACEUTYCZNY : Instrukcja instalacji Spis treści SPIS TREŚCI 2 1. INSTRUKCJA INSTALACJI I DEZINSTALACJI 3 1.1. Instalacja i konfiguracja wersji jednostanowiskowej 3 1.2.
ZESTAW LABORATORYJNY I ZESTAW FARMACEUTYCZNY : Instrukcja instalacji Spis treści SPIS TREŚCI 2 1. INSTRUKCJA INSTALACJI I DEZINSTALACJI 3 1.1. Instalacja i konfiguracja wersji jednostanowiskowej 3 1.2.
Instrukcja. importu dokumentów. z programu Fakt do programu Płatnik. oraz. przesyłania danych do ZUS. przy pomocy programu Płatnik
 Fakt Dystrybucja, Instrukcja z dnia 06.2010 Instrukcja importu dokumentów z programu Fakt do programu Płatnik oraz przesyłania danych do ZUS przy pomocy programu Płatnik 1/22 1 Eksport danych z Programu
Fakt Dystrybucja, Instrukcja z dnia 06.2010 Instrukcja importu dokumentów z programu Fakt do programu Płatnik oraz przesyłania danych do ZUS przy pomocy programu Płatnik 1/22 1 Eksport danych z Programu
Instalacja programu Warsztat 3 w sieci
 Instalacja programu Warsztat 3 w sieci (proszę uważnie przeczytać do końca) Spis treści 1 Przed instalacją...2 2 Przeprowadzanie po raz pierwszy instalacji sieciowej...3 2.1 Dane umieszczone na jednej
Instalacja programu Warsztat 3 w sieci (proszę uważnie przeczytać do końca) Spis treści 1 Przed instalacją...2 2 Przeprowadzanie po raz pierwszy instalacji sieciowej...3 2.1 Dane umieszczone na jednej
BACKUP BAZ DANYCH FIREBIRD
 BACKUP BAZ DANYCH FIREBIRD SPIS TREŚCI Informacje ogólne... 2 Tworzenie projektu... 2 Krok 1: Informacje podstawowe... 2 Krok 2: Dane... 3 Backup bazy umieszczonej na serwerze... 3 Bezpośredni backup pliku
BACKUP BAZ DANYCH FIREBIRD SPIS TREŚCI Informacje ogólne... 2 Tworzenie projektu... 2 Krok 1: Informacje podstawowe... 2 Krok 2: Dane... 3 Backup bazy umieszczonej na serwerze... 3 Bezpośredni backup pliku
Tworzenie zespołu. Laboratorium Technik Komputerowych I, Inventor, ćw. 4. Wstawianie komponentów i tworzenie wiązań między nimi.
 Tworzenie zespołu Wstawianie komponentów i tworzenie wiązań między nimi. 0. Ustalenie aktualnego projektu Projekt, w Inventorze, to plik tekstowy z rozszerzeniem.ipj, definiujący foldery zawierające pliki
Tworzenie zespołu Wstawianie komponentów i tworzenie wiązań między nimi. 0. Ustalenie aktualnego projektu Projekt, w Inventorze, to plik tekstowy z rozszerzeniem.ipj, definiujący foldery zawierające pliki
pomocą programu WinRar.
 1. Pobieramy oprogramowanie dla kamery ze strony. Z menu produkty wybieramy swój model kamery. Następnie na podstronie produktu wybieramy zakładkę [POMOC] - klikamy symbol szarej strzałki aby rozpocząć
1. Pobieramy oprogramowanie dla kamery ze strony. Z menu produkty wybieramy swój model kamery. Następnie na podstronie produktu wybieramy zakładkę [POMOC] - klikamy symbol szarej strzałki aby rozpocząć
1. Otwórz pozycję Piston.iam
 1. Otwórz pozycję Piston.iam 2. Wybierz z drzewa wyboru poziomego Środowisko następnie Symulacja Dynamiczna 3. Wybierz Ustawienia Symulacji 4. W ustawieniach symulacji dynamicznej zaznacz: - Automatycznie
1. Otwórz pozycję Piston.iam 2. Wybierz z drzewa wyboru poziomego Środowisko następnie Symulacja Dynamiczna 3. Wybierz Ustawienia Symulacji 4. W ustawieniach symulacji dynamicznej zaznacz: - Automatycznie
epuap Archiwizacja w Osobistym Składzie Dokumentów
 epuap Archiwizacja w Osobistym Składzie Dokumentów Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka SPIS TREŚCI SPIS
epuap Archiwizacja w Osobistym Składzie Dokumentów Projekt współfinansowany ze środków Europejskiego Funduszu Rozwoju Regionalnego w ramach Programu Operacyjnego Innowacyjna Gospodarka SPIS TREŚCI SPIS
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C)
") Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
Warsztaty AVR. Instalacja i konfiguracja środowiska Eclipse dla mikrokontrolerów AVR. Dariusz Wika
 Warsztaty AVR Instalacja i konfiguracja środowiska Eclipse dla mikrokontrolerów AVR Dariusz Wika 1.Krótki wstęp: Eclipse to rozbudowane środowisko programistyczne, które dzięki możliwości instalowania
Warsztaty AVR Instalacja i konfiguracja środowiska Eclipse dla mikrokontrolerów AVR Dariusz Wika 1.Krótki wstęp: Eclipse to rozbudowane środowisko programistyczne, które dzięki możliwości instalowania
FAQ: 00000012/PL Data: 19/11/2007 Programowanie przez Internet: Przekierowanie portu na SCALANCE S 612 w celu umo
 W tym dokumencie opisano przekierowanie portu na sprzętowym firewall u SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) w celu umoŝliwienia komunikacji STEP 7 ze sterownikiem przez sieć Ethernet/Internet.
W tym dokumencie opisano przekierowanie portu na sprzętowym firewall u SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) w celu umoŝliwienia komunikacji STEP 7 ze sterownikiem przez sieć Ethernet/Internet.
Skróty klawiaturowe w systemie Windows 10
 Skróty klawiaturowe w systemie Windows 10 Skróty klawiaturowe to klawisze lub kombinacje klawiszy, które zapewniają alternatywny sposób na wykonanie czynności zwykle wykonywanych za pomocą myszy. Kopiowanie,
Skróty klawiaturowe w systemie Windows 10 Skróty klawiaturowe to klawisze lub kombinacje klawiszy, które zapewniają alternatywny sposób na wykonanie czynności zwykle wykonywanych za pomocą myszy. Kopiowanie,
EasyLink. Instrukcja obsługi. Sterownik klawiatury brajlowskiej pod Windows wersja 1.2. Poznań, Sierpień 2009 r.
 EasyLink Sterownik klawiatury brajlowskiej pod Windows wersja 1.2 Instrukcja obsługi Poznań, Sierpień 2009 r. Spis treści 1. Wprowadzenie...1 1.1 Oprogramowanie...1 1.2 Połączenie urządzenia z komputerem...1
EasyLink Sterownik klawiatury brajlowskiej pod Windows wersja 1.2 Instrukcja obsługi Poznań, Sierpień 2009 r. Spis treści 1. Wprowadzenie...1 1.1 Oprogramowanie...1 1.2 Połączenie urządzenia z komputerem...1
Instrukcja instalacji i obsługi modemu ED77 pod systemem operacyjnym Windows 98 SE (wydanie drugie)
") Instrukcja instalacji i obsługi modemu ED77 pod systemem operacyjnym Windows 98 SE (wydanie drugie) UWAGA Podstawowym wymaganiem dla uruchomienia modemu ED77 jest komputer klasy PC z portem USB 1.1 Instalacja
Instrukcja instalacji i obsługi modemu ED77 pod systemem operacyjnym Windows 98 SE (wydanie drugie) UWAGA Podstawowym wymaganiem dla uruchomienia modemu ED77 jest komputer klasy PC z portem USB 1.1 Instalacja
Instrukcja obsługi programu MPJ6
 Instrukcja obsługi programu MPJ6 Spis treści 1. LOGOWANIE...3 2. INTERFEJS UŻYTKOWNIKA...4 2.1. WIDOK GŁÓWNY...5 2.1.1. Ustawienia...5 2.1.2. Wybór klasy...5 2.1.3. Zegar...5 2.1.4. Timer...6 2.1.5. Tryb
Instrukcja obsługi programu MPJ6 Spis treści 1. LOGOWANIE...3 2. INTERFEJS UŻYTKOWNIKA...4 2.1. WIDOK GŁÓWNY...5 2.1.1. Ustawienia...5 2.1.2. Wybór klasy...5 2.1.3. Zegar...5 2.1.4. Timer...6 2.1.5. Tryb
podstawowa obsługa panelu administracyjnego
 podstawowa obsługa panelu administracyjnego Poniższy dokument opisuje podstawowe czynności i operacje jakie należy wykonać, aby poprawnie zalogować się i administrować środowiskiem maszyn wirtualnych usługi
podstawowa obsługa panelu administracyjnego Poniższy dokument opisuje podstawowe czynności i operacje jakie należy wykonać, aby poprawnie zalogować się i administrować środowiskiem maszyn wirtualnych usługi
Programowanie robota IRb-1400
 Programowanie robota IRb-1400 Paweł Ludwików 6 kwietnia 2005 roku Spis treści 1 Język RAPID 2 1.1 Przegląd instrukcji............................... 2 1.2 Opis instrukcji..................................
Programowanie robota IRb-1400 Paweł Ludwików 6 kwietnia 2005 roku Spis treści 1 Język RAPID 2 1.1 Przegląd instrukcji............................... 2 1.2 Opis instrukcji..................................
Konfiguracja oprogramowania w systemach MS Windows dla kont z ograniczonymi uprawnieniami
 Konfiguracja oprogramowania w systemach MS Windows dla kont z ograniczonymi uprawnieniami Dotyczy programów opartych na bazie Firebird: System Obsługi Zleceń PL+ Grafik Urlopowy PL+ Zarządzanie Szkoleniami
Konfiguracja oprogramowania w systemach MS Windows dla kont z ograniczonymi uprawnieniami Dotyczy programów opartych na bazie Firebird: System Obsługi Zleceń PL+ Grafik Urlopowy PL+ Zarządzanie Szkoleniami
OPERACJE NA PLIKACH I FOLDERACH
 OPERACJE NA PLIKACH I FOLDERACH Czym są pliki i foldery? krótkie przypomnienie Wszelkie operacje można przedstawić w postaci cyfrowej. Do tego celu wykorzystywane są bity - ciągi zer i jedynek. Zapisany
OPERACJE NA PLIKACH I FOLDERACH Czym są pliki i foldery? krótkie przypomnienie Wszelkie operacje można przedstawić w postaci cyfrowej. Do tego celu wykorzystywane są bity - ciągi zer i jedynek. Zapisany
Badanie ruchu złożenia
 Badanie ruchu złożenia W wersji Standard programu SolidWorks mamy do dyspozycji dwie aplikacje: Podstawowy ruch symulacja ruchu z użyciem grawitacji, sprężyn, napędów oraz kontaktu między komponentami.
Badanie ruchu złożenia W wersji Standard programu SolidWorks mamy do dyspozycji dwie aplikacje: Podstawowy ruch symulacja ruchu z użyciem grawitacji, sprężyn, napędów oraz kontaktu między komponentami.
Cover sheet. WinCC (TIA Portal) FAQ Listopad 2012
 FAQ Listopad 2012") Cover sheet W jaki sposób migrować projekt zintegrowany ze STEP 7 z WinCC flexible do WinCC (TIA Portal)? WinCC (TIA Portal) FAQ Listopad 2012 Service & Support Answers for industry. Pytanie Dokument ten
Cover sheet W jaki sposób migrować projekt zintegrowany ze STEP 7 z WinCC flexible do WinCC (TIA Portal)? WinCC (TIA Portal) FAQ Listopad 2012 Service & Support Answers for industry. Pytanie Dokument ten
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały