Robot EPSON SCARA T3-401S
|
|
|
- Urszula Karpińska
- 5 lat temu
- Przeglądów:
Transkrypt

1 Robot EPSON SCARA T3-401S 1

2 Napędy robota wykorzystują silniki AC, a pomiar położenia realizowany jest za pomocą enkoderów przyrostowych. 2
3 3
4 4
5 Przebieg ćwiczenia: Celem ćwiczenia jest zaznajomienie się ze środowiskiem EPSON RC+ a następnie stworzenie programu powodującego ruch robota pomiędzy punktami z wykorzystaniem języka SPEL+. Na wykonanie ćwiczenia składają się następujące etapy: 1. nawiązanie połączenia z robotem 2. uruchomienie napędów 3. pozycjonowanie poszczególnych ramion robota z poziomu Robot Managera 4. napisanie programu realizującego ruch robota w języku SPEL+ Środowisko EPSON RC Rys.1 Okno główne programu EPSON RC+ Narzędzie EPSON RC+ jest środowiskiem programistycznym umożliwiającym programowanie robotów EPSON. Programowanie realizowane jest metodą uczenia, na którą składają się dwa etapy: - nauczenie i zapamiętanie punktów w przestrzeni roboczej, w których ma zostać spozycjonowany robot - napisanie programu ruchu robota pomiędzy punktami za pomocą poleceń języka programowania SPEL+. 5

6 Robot EPSON T3-401S łączony jest z komputerem PC poprzez port USB. 1. Po uruchomieniu programu EPSON RC+ pojawia się okno pokazane na Rys. 1. Dla uzyskania połączenia z robotem należy wybrać: Setup/ PC to Controller Communication. W otwartym oknie, pokazanym na Rys. 2, wybrać USB i nacisnąć Connect. Po uzyskaniu połączenia zamknąć okno: Close. Rys.2 Okno PC to Controller Communication 2. Aby uzyskać dostęp do wszystkich opcji środowiska wybrać: Project/New i nadać nazwę projektu (Rys. 3). Rys.3 Okno Project/New 6
; POWER HIGH: możliwość uzyskania pełnych")
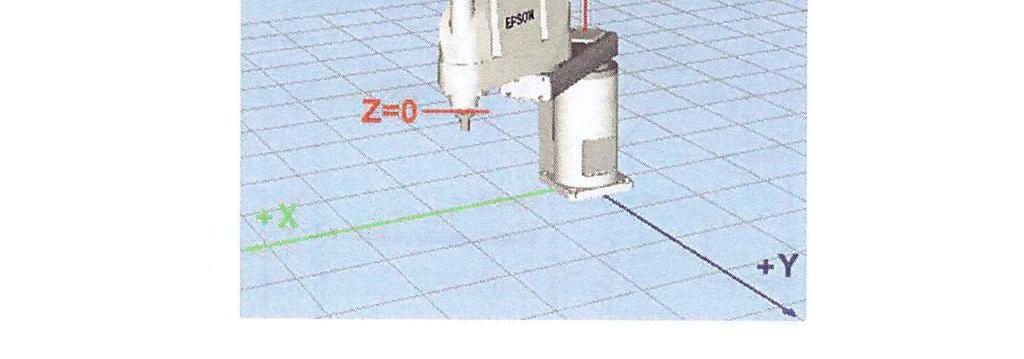
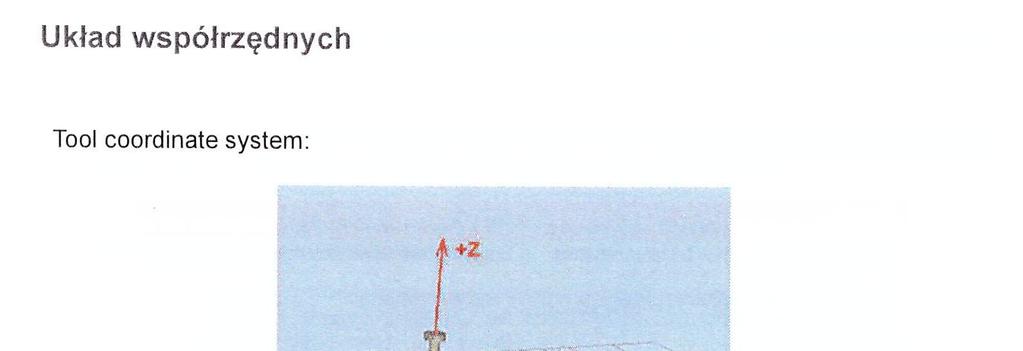
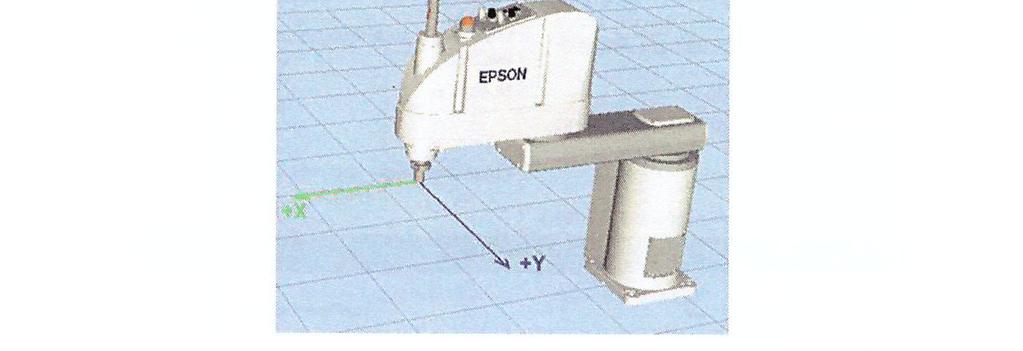
7 3. Aby uruchomić napędy robota wybieramy: Tools/Robot Manager (Rys.4). Przyciski MOTOR OFF/MOTOR ON: służą do włączania i wyłączania napędów. POWER LOW/POWER HIGH: wybieranie trybu pracy; POWER LOW: ograniczona prędkość ruchu wykorzystywana podczas uczenia i testowania (ustawiana defaultowo); POWER HIGH: możliwość uzyskania pełnych prędkości. Przycisk Free All: zwolnienie hamulców wszystkich osi (brak możliwości wykonania ruchu). Przycisk Lock All: włączenie hamulców. Przycisk Reset: resetowanie kontrolera robota. Przycisk Home: ustawianie robota w pewnej, zdefiniowanej przez użytkownika, pozycji. Rys.4 Okno Tools/Robot Manager 4. Proces uczenia punktów: w Robot Manager wybieramy zakładkę Jog&Teach (Teach Points) (Rys.5). Mode: wybór układu współrzędnych, w którym uczymy robota: Point (układ złączowy), World (układ kartezjański), Tool (układ narzędzia), Local (układ lokalny) Speed: ustawianie prędkości ruchu w trakcie uczenia (Low, High) Current Position: wyświetlanie współrzędnych punktu (w układzie: Joint, World lub Puls) Current Arm Orientation: pokazuje aktualną konfigurację ramion 1 i 2 (Righty, Lefty) Jog Distance: ustawianie sposobu ruchu podczas uczenia: Continuous (ciągły), Long (skokowo co 10 mm), Medium (skokowo co 1 mm), Short (skokowo co 0.1 mm) Używając przycisków J1, J2, J3 i J4 ustawiamy punkt w przestrzeni roboczej, następnie z rozwijanego menu wybieramy numer punktu (Point) i naciskamy przycisk Teach. Pojawia się okno, w którym należy nadać nazwę dla danego punktu, pod jaką będzie identyfikowany w projekcie. Wszystkie nauczone punkty są zapisywane w pliku robot1.pts. Gdy chcemy mieć inny zbiór punktów to wybieramy (w EPSON RC+) ikonę New, a następnie w pojawiającym się oknie wybieramy z rozwijanego menu Point i nadajemy nazwę: nazwa.pts. W polu Point File w rozwijanym menu pojawią się różne zbiory punktów. 7
. Aby zdefiniować pozycję HOME należy w Tools/Robot Manager otworzyć zakładkę Home Config (Rys.")

8 Rys.5 Okno Robot Manager/Jog&Teach (zakładka Teach Points) Wybierając w Robot Manager zakładkę Points można zmieniać konfigurację ramion 1 i 2 dla zapisanych punktów (kolumna Hand). Aby zdefiniować pozycję HOME należy w Tools/Robot Manager otworzyć zakładkę Home Config (Rys.6). Ustawić robota w pozycji, która ma być pozycją HOME, wczytać pozycję (przycisk Read Current Position) i w kolumnie Home Order ustawić kolejność wykonywania ruchów przez osie robota przy dochodzeniu do ustawienia HOME. Pozycja HOME jest podawana w impulsach z enkoderów. 8

, Move (ruch po linii prostej w układzie kartezjańskim), CRC (ruch po okręgu w układzie kartezjańskim).")
9 Rys.6 Okno Home Configuration 5. Testowanie sposobów ruchu. Wybierając w Jog&Teach zakładkę Execute Motion (Rys.7) można przetestować sposoby ruchu między nauczonymi punktami. W polu Destination z rozwijanego menu wybieramy punkt do którego ma być zrealizowany ruch, a następnie w polu Command z rozwijanego menu wybieramy jeden ze zdefiniowanych dla robota sposobów ruchu: Go (ruch synchroniczny PTP w układzie złączowym), Jump (przy rozpoczęciu ruchu oś 4 jest podnoszona do pozycji zerowej, przy zakończeniu oś 4 ustawiana jest w pozycji dla danego punktu; reszta ruchu jak w Go), Move (ruch po linii prostej w układzie kartezjańskim), CRC (ruch po okręgu w układzie kartezjańskim). Po naciśnięciu Execute ruch zostanie wykonany (pod warunkiem, że jest on fizycznie możliwy do wykonania między zadanymi punktami). W przypadku wystąpienia błędu, wynikiem którego jest blokada napędów, należy zresetować kontroler (w Control Panel, przycisk Reset). Rys.7 Okno Robot Manager/Jog&Teach (zakładka Execute Motion) 9
 np. Chwytak.")

10 Robot wyposażony jest w chwytak pneumatyczny podpięty do wyjścia cyfrowego Out 10 (Tools/IO Monitor/Outputs) (Rys.8). Aby dostęp do chwytaka był możliwy w projekcie należy go zdefiniować nadając nazwę dla bitu Out 10. Nadawanie nazwy dla wyjść odbywa się w zakładce (Tools/IO Label Editor/Outputs) np. Chwytak. Po zdefiniowaniu dostęp do chwytaka jest realizowany za pomocą poleceń języka SPEL+ (On i Off). 6. Edycja programu. Rys.8 Definiowanie chwytaka w systemie Po zdefiniowaniu punktów i przetestowaniu ruchów można przystąpić do edycji programu. Aby otworzyć okno edycji programu należy w Project Explorer dwukrotnie kliknąć na main.prg ( Rys.9). Pomiędzy dwie linie widoczne w oknie wpisuje się kolejne linie poleceń języka SPEL+. Rys.9 Okno edycji programu 10

 dostępne są przyciski Start/Stop do uruchomienia i zatrzymania programu, Pause/Continue do wstrzymania i kontynuowania")

11 7. Uruchomienie programu. Rys.10 Przykładowy program ruchu w nieskończonej pętli Uruchomienie programu następuje po wybraniu Run/Run Window. W pojawiającym się oknie (Rys.11) dostępne są przyciski Start/Stop do uruchomienia i zatrzymania programu, Pause/Continue do wstrzymania i kontynuowania programu. Rys.11 Okno uruchomienia programu Jeżeli w trakcie wykonywania programu pojawi się błąd skutkujący blokadą napędów należy zatrzymać program (przycisk STOP) a następnie zresetować kontroler (Tools/Robot Manager/Reset).!!! Po zakończeniu pracy z robotem należy wyłączyć napędy robota (Tools/Robot Manager/MOTOR OFF) oraz rozłączyć komunikację z komputerem w tym celu należy z menu głównego wybrać Setup/PC to Controller Communication po czym nacisnąć Disconnect. 11


12 12
13 13
14 14
15 15

16 Poniżej przedstawione zostały wybrane polecenia języka SPEL+. 16
17 17
18 18
19 19
20 20
21 21

22 22
23 23
24 24
25 25

26 26
27 27
28 28
29 29
30 Polecenie WAIT WAIT time Polecenie to umożliwia ustawianie czasu oczekiwania przed wykonaniem kolejnego polecenia. 30
31 31
Rys. 1. Brama przesuwna do wykonania na zajęciach
 Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
Programowanie robotów off-line 2 Kuka.Sim Pro Import komponentów do środowiska Kuka.Sim Pro i modelowanie chwytaka. Cel ćwiczenia: Wypracowanie umiejętności dodawania własnych komponentów do programu oraz
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie
 TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki
 Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink.
 Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Wtyczka MPG XHC_WHB04B-4
 Wtyczka MPG WHB04B-4 Copyright 2019 PPHU ELCOSIMO 1 Wtyczka MPG XHC_WHB04B-4 wersja 1.1 2019.04.29 Wtyczka MPG WHB04B-4 Copyright 2019 PPHU ELCOSIMO 2 Instalacja 1) Plik Remote.dll przekopiować do folderu
Wtyczka MPG WHB04B-4 Copyright 2019 PPHU ELCOSIMO 1 Wtyczka MPG XHC_WHB04B-4 wersja 1.1 2019.04.29 Wtyczka MPG WHB04B-4 Copyright 2019 PPHU ELCOSIMO 2 Instalacja 1) Plik Remote.dll przekopiować do folderu
Sterownik kompaktowy Theben PHARAO II
 Wydział Elektroniki Politechniki Wrocławskiej Laboratorium Automatyki Budynkowej Sterownik kompaktowy Theben PHARAO II 1. Wstęp Pherao II jest niewielkim sterownikiem kompaktowym, który charakteryzuje
Wydział Elektroniki Politechniki Wrocławskiej Laboratorium Automatyki Budynkowej Sterownik kompaktowy Theben PHARAO II 1. Wstęp Pherao II jest niewielkim sterownikiem kompaktowym, który charakteryzuje
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Instrukcja ręcznej konfiguracji połączenia z Internetem przez. modem ED77 w systemie Windows XP
 Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows XP wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia. W
Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows XP wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia. W
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Instrukcja ręcznej konfiguracji połączenia z Internetem przez. modem ED77 w systemie Windows 2000
 Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows 2000 wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia.
Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows 2000 wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia.
Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56
 Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 I. Przeglądarka Firefox 56.0.1 Producenci przeglądarki Firefox wprowadzili nowy mechanizm do obsługi dodatków - WebExtension. Dotychczasowy
Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 I. Przeglądarka Firefox 56.0.1 Producenci przeglądarki Firefox wprowadzili nowy mechanizm do obsługi dodatków - WebExtension. Dotychczasowy
Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski SYSTEMY SCADA
 Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski SYSTEMY SCADA Laboratorium nr 14 PODSTAWY OBSŁUGI PROGRAMU WONDERWARE INTOUCH 10.1 Opracował: mgr inż. Marcel Luzar Cel: Konfiguracja
Instytut Sterowania i Systemów Informatycznych Uniwersytet Zielonogórski SYSTEMY SCADA Laboratorium nr 14 PODSTAWY OBSŁUGI PROGRAMU WONDERWARE INTOUCH 10.1 Opracował: mgr inż. Marcel Luzar Cel: Konfiguracja
Wtyczka MPG XHC_HB04
 Wtyczka MPG XHC_HB04 Copyright 2018 PPHU ELCOSIMO 1 Wtyczka MPG XHC_HB04 wersja 1.1 2018.08.13 Wtyczka MPG XHC_HB04 Copyright 2018 PPHU ELCOSIMO 2 Instalacja 1) Plik Remote.dll przekopiować do folderu
Wtyczka MPG XHC_HB04 Copyright 2018 PPHU ELCOSIMO 1 Wtyczka MPG XHC_HB04 wersja 1.1 2018.08.13 Wtyczka MPG XHC_HB04 Copyright 2018 PPHU ELCOSIMO 2 Instalacja 1) Plik Remote.dll przekopiować do folderu
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C)
") Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
3G FL760 instrukcja instalacji
 3G FL760 instrukcja instalacji Płyta CD zawiera aktualizacje 3G w wersji 2.1, oprogramowanie do przywrócenia wersji 2.0 oraz oprogramowanie do konfiguracji. Zestaw zawiera także instrukcje instalacji,
3G FL760 instrukcja instalacji Płyta CD zawiera aktualizacje 3G w wersji 2.1, oprogramowanie do przywrócenia wersji 2.0 oraz oprogramowanie do konfiguracji. Zestaw zawiera także instrukcje instalacji,
AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2004, 2005, LT 2004 i LT 2005
 AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2004, 2005, LT 2004 i LT 2005 4 lutego 2006 2 Wszelkie prawa zastrzeżone All Rights Reserved Copyright c by Pracownia Projektowa
AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2004, 2005, LT 2004 i LT 2005 4 lutego 2006 2 Wszelkie prawa zastrzeżone All Rights Reserved Copyright c by Pracownia Projektowa
Instrukcja obsługi. Sterownik ścienny KJR-12B/DP
 Instrukcja obsługi Sterownik ścienny KJR-12B/DP Wyłączny importer IO0024A032015 Spis treści Parametry sterownika... 3 Parametry sterownika... 3 Nazwy i funkcje wyświetlacza sterownika ściennego... 4 Przyciski
Instrukcja obsługi Sterownik ścienny KJR-12B/DP Wyłączny importer IO0024A032015 Spis treści Parametry sterownika... 3 Parametry sterownika... 3 Nazwy i funkcje wyświetlacza sterownika ściennego... 4 Przyciski
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. Wyświetlanie naprzemienne Numer parametru Wartość parametru
 Zadanie 1 Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. 5 Sekund = nie GOTOWY Wyświetlanie naprzemienne Numer parametru Wartość parametru 1 1 2009 Eaton Corporation. All
Zadanie 1 Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. 5 Sekund = nie GOTOWY Wyświetlanie naprzemienne Numer parametru Wartość parametru 1 1 2009 Eaton Corporation. All
Instalacja sterownika portu USB
 Instrukcja instalacji modemu TechLab ED77 w systemie Mac OS X. Instalacja modemu podzielona jest na cztery etapy: instalacja sterownika portu USB, instalacja skryptu modemu, konfiguracja modemu, konfiguracja
Instrukcja instalacji modemu TechLab ED77 w systemie Mac OS X. Instalacja modemu podzielona jest na cztery etapy: instalacja sterownika portu USB, instalacja skryptu modemu, konfiguracja modemu, konfiguracja
Problemy techniczne SQL Server
 Problemy techniczne SQL Server Instalacja Microsoft SQL Server 2008 R2 Express z płyty Optivum W poradzie opisano, jak zainstalować bezpłatną wersję programu bazodanowego Microsoft SQL Server 2008 R2 Express
Problemy techniczne SQL Server Instalacja Microsoft SQL Server 2008 R2 Express z płyty Optivum W poradzie opisano, jak zainstalować bezpłatną wersję programu bazodanowego Microsoft SQL Server 2008 R2 Express
INSTRUKCJA UŻYTKOWNIKA PORTALU SIDGG
 INSTRUKCJA UŻYTKOWNIKA PORTALU SIDGG dla Państwowy Instytut Geologiczny Państwowy Instytut Badawczy 1. Uruchomienie aplikacji. a. Wprowadź nazwę użytkownika w miejsce Nazwa użytkownika b. Wprowadź hasło
INSTRUKCJA UŻYTKOWNIKA PORTALU SIDGG dla Państwowy Instytut Geologiczny Państwowy Instytut Badawczy 1. Uruchomienie aplikacji. a. Wprowadź nazwę użytkownika w miejsce Nazwa użytkownika b. Wprowadź hasło
Pilot zdalnego sterowania DANE TECHNICZNE FUNKCJE PILOTA ZDALNEGO STEROWANIA
 Pilot zdalnego sterowania DANE TECHNICZNE Model sterownika R05/BGE Zasilane 3.0V (Baterie alkaliczne LR03 X 2) Najniższa wartość zasilania przy której emitowany jest sygnał ze sterownika 2.4V Maksymalna
Pilot zdalnego sterowania DANE TECHNICZNE Model sterownika R05/BGE Zasilane 3.0V (Baterie alkaliczne LR03 X 2) Najniższa wartość zasilania przy której emitowany jest sygnał ze sterownika 2.4V Maksymalna
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2009 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2009 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14. 1.2 Ustawienia wprowadzające. Auto CAD 14 1-1. Aby uruchomić AutoCada 14 kliknij ikonę
 Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
Auto CAD 14 1-1 1. Wprowadzenie. 1.1 Uruchamianie AutoCAD-a 14 Aby uruchomić AutoCada 14 kliknij ikonę AutoCAD-a 14 można uruchomić również z menu Start Start Programy Autodesk Mechanical 3 AutoCAD R14
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel
 etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
etrader Pekao Podręcznik użytkownika Strumieniowanie Excel Spis treści 1. Opis okna... 3 2. Otwieranie okna... 3 3. Zawartość okna... 4 3.1. Definiowanie listy instrumentów... 4 3.2. Modyfikacja lub usunięcie
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program
 LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
Problemy techniczne SQL Server
 Problemy techniczne SQL Server Instalacja Microsoft SQL Server 2008 R2 Express z płyty Optivum W poradzie opisano, jak zainstalować bezpłatną wersję programu bazodanowego Microsoft SQL Server 2008 R2 Express
Problemy techniczne SQL Server Instalacja Microsoft SQL Server 2008 R2 Express z płyty Optivum W poradzie opisano, jak zainstalować bezpłatną wersję programu bazodanowego Microsoft SQL Server 2008 R2 Express
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
KAMERA INSPEKCYJNA MODEL: TV-EC2M INSTRUKCJA OBSŁUGI
 KAMERA INSPEKCYJNA MODEL: TV-EC2M INSTRUKCJA OBSŁUGI 1. PRZEGLĄD URZĄDZENIA 1. Ekran LCD 2. Przycisk OK 3. Dżojstik Przycisk LEWO Przycisk PRAWO Przycisk GÓRA ( MODE) Przycisk DÓŁ (MODE) 4. Przycisk POWER
KAMERA INSPEKCYJNA MODEL: TV-EC2M INSTRUKCJA OBSŁUGI 1. PRZEGLĄD URZĄDZENIA 1. Ekran LCD 2. Przycisk OK 3. Dżojstik Przycisk LEWO Przycisk PRAWO Przycisk GÓRA ( MODE) Przycisk DÓŁ (MODE) 4. Przycisk POWER
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
Laboratorium - Instalacja Virtual PC
 5.0 5.4.1.4 Laboratorium - Instalacja Virtual PC Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium zainstalujesz i skonfigurujesz Tryb XP w Windows 7. Następnie uruchomisz podstawowe
5.0 5.4.1.4 Laboratorium - Instalacja Virtual PC Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium zainstalujesz i skonfigurujesz Tryb XP w Windows 7. Następnie uruchomisz podstawowe
Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek
 ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
ZAKŁAD MECHANIKI PŁYNÓW I AERODYNAMIKI LABORATORIUM AUTOMATYZACJI PROCESOW PRODUKCYJNYCH Programowanie kontrolera RH robota S-420S Opracował: Karol Szostek 1. Cel ćwiczenia Rzeszów 2008 Celem ćwiczenia
Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56
 Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 I. Firefox w wersji 64 bitowej W przypadku, gdy przeglądarka Firefox v 56.0 (32 bity) samoczynnie aktualizuje się do wersji 56.0 (64
Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 I. Firefox w wersji 64 bitowej W przypadku, gdy przeglądarka Firefox v 56.0 (32 bity) samoczynnie aktualizuje się do wersji 56.0 (64
Następnie kliknąć prawym klawiszem myszy na Połączenie sieci bezprzewodowej i wybrać Wyłącz.
 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA850RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET, który znajduje obok portu LAN tego urządzenia przez
Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA850RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET, który znajduje obok portu LAN tego urządzenia przez
INSTRUKCJA UŻYTKOWNIKA MPCC
 V1.0.0 (10.14.2015) 1 (7) INSTALACJA UWAGA: Produkt działa jako urządzenie nadrzędne Modbus. Dlatego w przypadku podłączania narzędzia do istniejącej sieci Modbus konieczne może okazać się odłączenie innego
V1.0.0 (10.14.2015) 1 (7) INSTALACJA UWAGA: Produkt działa jako urządzenie nadrzędne Modbus. Dlatego w przypadku podłączania narzędzia do istniejącej sieci Modbus konieczne może okazać się odłączenie innego
Sterownik przewodowy. Bosch Climate 5000 SCI / MS. Model: KJR-12B/DP(T)-E-2
-E-2") Bosch Climate 5000 SCI / MS Sterownik przewodowy Model: KJR-12B/DP(T)-E-2 Instrukcja obsługi sterownika przewodowego klimatyzatora kasetonowego 4-stronnego i kanałowego 6720867708 (2017/06) PL Kompatybilny
Bosch Climate 5000 SCI / MS Sterownik przewodowy Model: KJR-12B/DP(T)-E-2 Instrukcja obsługi sterownika przewodowego klimatyzatora kasetonowego 4-stronnego i kanałowego 6720867708 (2017/06) PL Kompatybilny
AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2006 i LT 2006
 AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2006 i LT 2006 4 lutego 2006 2 Wszelkie prawa zastrzeżone All Rights Reserved Copyright c by Pracownia Projektowa PROFIL P Wrocław
AutoPROFIL R 6 Dodatek do opisu programu Współpraca z programem AutoCAD 2006 i LT 2006 4 lutego 2006 2 Wszelkie prawa zastrzeżone All Rights Reserved Copyright c by Pracownia Projektowa PROFIL P Wrocław
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Podłączenie urządzenia. W trakcie konfiguracji routera należy korzystać wyłącznie z przewodowego połączenia sieciowego.
 Instalacja Podłączenie urządzenia W trakcie konfiguracji routera należy korzystać wyłącznie z przewodowego połączenia sieciowego. Należy dopilnować by nie podłączać urządzeń mokrymi rękami. Jeżeli aktualnie
Instalacja Podłączenie urządzenia W trakcie konfiguracji routera należy korzystać wyłącznie z przewodowego połączenia sieciowego. Należy dopilnować by nie podłączać urządzeń mokrymi rękami. Jeżeli aktualnie
Kontroler LED programowalny czasowo 12V 20A 5 kanałów
 S t r o n a 1 Kontroler LED programowalny czasowo 12V 20A 5 kanałów Programowalny kontroler LED pozwala zaplanować pracę system świetlnego opartego o LED. Użytkownik może zaprogramować godziny włączenia,
S t r o n a 1 Kontroler LED programowalny czasowo 12V 20A 5 kanałów Programowalny kontroler LED pozwala zaplanować pracę system świetlnego opartego o LED. Użytkownik może zaprogramować godziny włączenia,
WIFI Full-HD Black-300
 INSTRUKCJA OBSŁUGI WIFI Full-HD Black-300 INSTRUKCJĘ W KOLOROWEJ WERSJI CYFROWEJ MOŻNA ZNALEŹĆ NA WWW.KAMERYSZPIEGOWSKIE.WAW.PL (WPISZ NA DOLE W WYSZUKIWARCE KOD: 563) I PRZED PIERWSZYM UŻYCIEM: Ładowanie
INSTRUKCJA OBSŁUGI WIFI Full-HD Black-300 INSTRUKCJĘ W KOLOROWEJ WERSJI CYFROWEJ MOŻNA ZNALEŹĆ NA WWW.KAMERYSZPIEGOWSKIE.WAW.PL (WPISZ NA DOLE W WYSZUKIWARCE KOD: 563) I PRZED PIERWSZYM UŻYCIEM: Ładowanie
Przygotowanie urządzenia:
 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA730RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET, który znajduje się z tyłu tego urządzenia przez około
Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA730RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET, który znajduje się z tyłu tego urządzenia przez około
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
1. Kontroler bezprzewodowy: R51/CE i R51/E (Standard)
") 1. Kontroler bezprzewodowy: R51/CE i R51/E (Standard) 1.1 Specyfikacje kontrolera bezprzewodowego Model R51/CE i R51/E Napięcie znamionowe 3.0V Najniższe napięcie procesora CPU emitującego sygnał 2.0V
1. Kontroler bezprzewodowy: R51/CE i R51/E (Standard) 1.1 Specyfikacje kontrolera bezprzewodowego Model R51/CE i R51/E Napięcie znamionowe 3.0V Najniższe napięcie procesora CPU emitującego sygnał 2.0V
Wahadło. Celem ćwiczenia jest zapoznanie się z zasadą dokonywania wideopomiarów w systemie Coach 6 oraz obserwacja modelu wahadła matematycznego.
 6COACH38 Wahadło Program: Coach 6 Projekt: komputer H : C:\Program Files (x86)\cma\coach6\full.en\cma Coach Projects\PTSN Coach 6\Wideopomiary\wahadło.cma Cel ćwiczenia Celem ćwiczenia jest zapoznanie
6COACH38 Wahadło Program: Coach 6 Projekt: komputer H : C:\Program Files (x86)\cma\coach6\full.en\cma Coach Projects\PTSN Coach 6\Wideopomiary\wahadło.cma Cel ćwiczenia Celem ćwiczenia jest zapoznanie
Rys. 18a). Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.
. Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.") kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7
 5.0 5.3.3.5 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7 Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
5.0 5.3.3.5 Laboratorium - Monitorowanie i zarządzanie zasobami systemu Windows 7 Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi administracyjnych
Laboratorium - Narzędzie linii uruchamiania w systemie Windows Vista
 5.0 5.3.7.5 Laboratorium - Narzędzie linii uruchamiania w systemie Windows Vista Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi linii komend Windows,
5.0 5.3.7.5 Laboratorium - Narzędzie linii uruchamiania w systemie Windows Vista Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym laboratorium, będziesz korzystać z narzędzi linii komend Windows,
Gromadzenie danych. Przybliżony czas ćwiczenia. Wstęp. Przegląd ćwiczenia. Poniższe ćwiczenie ukończysz w czasie 15 minut.
 Gromadzenie danych Przybliżony czas ćwiczenia Poniższe ćwiczenie ukończysz w czasie 15 minut. Wstęp NI-DAQmx to interfejs służący do komunikacji z urządzeniami wspomagającymi gromadzenie danych. Narzędzie
Gromadzenie danych Przybliżony czas ćwiczenia Poniższe ćwiczenie ukończysz w czasie 15 minut. Wstęp NI-DAQmx to interfejs służący do komunikacji z urządzeniami wspomagającymi gromadzenie danych. Narzędzie
Rejestrator temperatury i wilgotności AX-DT100. Instrukcja obsługi
 Rejestrator temperatury i wilgotności AX-DT100 Instrukcja obsługi Wstęp Rejestrator temperatury i wilgotności wyposażony jest w bardzo dokładny czujnik temperatury i wilgotności. Głównymi zaletami rejestratora
Rejestrator temperatury i wilgotności AX-DT100 Instrukcja obsługi Wstęp Rejestrator temperatury i wilgotności wyposażony jest w bardzo dokładny czujnik temperatury i wilgotności. Głównymi zaletami rejestratora
Instrukcja konfiguracji urządzenia TL-WA830RE v.1
 Instrukcja konfiguracji urządzenia TL-WA830RE v.1 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA830RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET,
Instrukcja konfiguracji urządzenia TL-WA830RE v.1 Przygotowanie urządzenia: Krok 1 Włączyć i zresetować wzmacniacz sygnału TL-WA830RE do ustawień fabrycznych naciskając i przytrzymując przycisk RESET,
E W górę (Up) Służy do wybierania trybu treningu i zwiększaniu wyświetlanych wartości
 Służy do wybierania trybu treningu i zwiększaniu wyświetlanych wartości") W górę (Up) Służy do wybierania trybu treningu i zwiększaniu wyświetlanych wartości Reset Służy do resetowania wybranych funkcji w dowolnym momencie. Przed zresetowaniem musi zostać naciśnięty przycisk
W górę (Up) Służy do wybierania trybu treningu i zwiększaniu wyświetlanych wartości Reset Służy do resetowania wybranych funkcji w dowolnym momencie. Przed zresetowaniem musi zostać naciśnięty przycisk
Projektowanie baz danych za pomocą narzędzi CASE
 Projektowanie baz danych za pomocą narzędzi CASE Metody tworzenia systemów informatycznych w tym, także rozbudowanych baz danych są komputerowo wspomagane przez narzędzia CASE (ang. Computer Aided Software
Projektowanie baz danych za pomocą narzędzi CASE Metody tworzenia systemów informatycznych w tym, także rozbudowanych baz danych są komputerowo wspomagane przez narzędzia CASE (ang. Computer Aided Software
instrukcja instalacji modemu SpeedTouch 605s
 instrukcja instalacji modemu SpeedTouch 605s Spis treści 1. Opis diod kontrolnych i gniazd modemu SpeedTouch 605s... 2 1.1. Opis diod kontrolnych... 2 1.2. Opis gniazd... 3 2. Konfiguracja połączenia przewodowego...
instrukcja instalacji modemu SpeedTouch 605s Spis treści 1. Opis diod kontrolnych i gniazd modemu SpeedTouch 605s... 2 1.1. Opis diod kontrolnych... 2 1.2. Opis gniazd... 3 2. Konfiguracja połączenia przewodowego...
Aktualizacja dodatku Saba Security Plugin
 Autor: BT131c Wersja: 1.0 Jan Dziubiński Data: 19.10.2017 Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 Dokument jest własnością P.I. SABA SERVICE sp. z o.o. Podlega ewidencji i kontroli
Autor: BT131c Wersja: 1.0 Jan Dziubiński Data: 19.10.2017 Aktualizacja dodatku Saba Security Plugin w przeglądarce Firefox 56 Dokument jest własnością P.I. SABA SERVICE sp. z o.o. Podlega ewidencji i kontroli
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU
 Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
FAQ: 00000003/PL Data: 14/06/2007 Konfiguracja współpracy programów PC Access i Microsoft Excel ze sterownikiem S7-200
 Za pomocą oprogramowania PC Access oraz programu Microsoft Excel moŝliwa jest prosta wizualizacja programów wykonywanych na sterowniku SIMATIC S7-200. PC Access umoŝliwia podgląd wartości zmiennych oraz
Za pomocą oprogramowania PC Access oraz programu Microsoft Excel moŝliwa jest prosta wizualizacja programów wykonywanych na sterowniku SIMATIC S7-200. PC Access umoŝliwia podgląd wartości zmiennych oraz
Instrukcja konfigurowania GPS Trackera
 Gdzie możesz zaopatrzyć się w lokalizator GPS? Instrukcja konfigurowania GPS Trackera Jeśli nie posiadasz własnego lokalizatora GPS, to można wypożyczyć go w wyznaczonych Punktach Informacji i Monitorowania
Gdzie możesz zaopatrzyć się w lokalizator GPS? Instrukcja konfigurowania GPS Trackera Jeśli nie posiadasz własnego lokalizatora GPS, to można wypożyczyć go w wyznaczonych Punktach Informacji i Monitorowania
11. Rozwiązywanie problemów
 11. Rozwiązywanie problemów Ćwiczenia zawarte w tym rozdziale pokaŝą, jak rozwiązywać niektóre z problemów, jakie mogą pojawić się podczas pracy z komputerem. Windows XP został wyposaŝony w kilka mechanizmów
11. Rozwiązywanie problemów Ćwiczenia zawarte w tym rozdziale pokaŝą, jak rozwiązywać niektóre z problemów, jakie mogą pojawić się podczas pracy z komputerem. Windows XP został wyposaŝony w kilka mechanizmów
Projektowanie z użyciem procesora programowego Nios II
 Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
DEMERO Automation Systems
 Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
Programowanie wektorowych przetwornic częstotliwości serii POSIDRIVE FDS5000 / MDS5000 i serwonapędów POSIDRIVE MDS5000 / POSIDYN SDS5000 firmy Stober Antriebstechnik Konfiguracja parametrów w programie
MultiBoot Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2006, 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji
MultiBoot Instrukcja obsługi Copyright 2006, 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji
2 INSTALACJA OPROGRAMOWANIA. 3 3 GŁÓWNE OKNO PROGRAMU 3 4 MODUŁ OBSŁUGI ARCHIWUM 7
 LUBUSKIE ZAKŁADY APARATÓW ELEKTRYCZNYCH LUMEL S.A. W ZIELONEJ GÓRZE PROGRAM DO KONFIGURACJI KONCENTRATORA DANYCH TYPU PD22 PD22Wiz.exe INSTRUKCJA OBSŁUGI Zielona Góra 2007 2 SPIS TREŚCI: 1 WSTĘP. 3 2 INSTALACJA
LUBUSKIE ZAKŁADY APARATÓW ELEKTRYCZNYCH LUMEL S.A. W ZIELONEJ GÓRZE PROGRAM DO KONFIGURACJI KONCENTRATORA DANYCH TYPU PD22 PD22Wiz.exe INSTRUKCJA OBSŁUGI Zielona Góra 2007 2 SPIS TREŚCI: 1 WSTĘP. 3 2 INSTALACJA
Laboratorium Siemens UMX2MS
 Laboratorium Siemens UMX2MS Podstawy UMX (UMX 1) Laboratorium to polega na przeprowadzeniu konfiguracji urządzenia Siemens UMX2MS. Student na koniec pracy przy urządzeniu przywraca jego ustawienia domyślne.
Laboratorium Siemens UMX2MS Podstawy UMX (UMX 1) Laboratorium to polega na przeprowadzeniu konfiguracji urządzenia Siemens UMX2MS. Student na koniec pracy przy urządzeniu przywraca jego ustawienia domyślne.
MultiBoot. Instrukcja obsługi
 MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
MultiBoot Instrukcja obsługi Copyright 2007 Hewlett-Packard Development Company, L.P. Informacje zawarte w niniejszym dokumencie mogą zostać zmienione bez powiadomienia. Jedyne warunki gwarancji na produkty
Zgrywus dla Windows v 1.12
 Zgrywus dla Windows v 1.12 Spis treści. 1. Instalacja programu. 2 2. Pierwsze uruchomienie programu.. 3 2.1. Opcje programu 5 2.2. Historia zdarzeń 7 2.3. Opisy nadajników. 8 2.4. Ustawienia zaawansowane...
Zgrywus dla Windows v 1.12 Spis treści. 1. Instalacja programu. 2 2. Pierwsze uruchomienie programu.. 3 2.1. Opcje programu 5 2.2. Historia zdarzeń 7 2.3. Opisy nadajników. 8 2.4. Ustawienia zaawansowane...
Konfiguracja Wireless-N Mini Router
 Konfiguracja Wireless-N Mini Router Przed przystąpieniem do konfiguracji należy sprawdzić IP komputera w sieci wewnętrznej. W systemie Windows należy kliknąć w menu Start następnie Uruchom, pokaże się
Konfiguracja Wireless-N Mini Router Przed przystąpieniem do konfiguracji należy sprawdzić IP komputera w sieci wewnętrznej. W systemie Windows należy kliknąć w menu Start następnie Uruchom, pokaże się
2. W oknie dialogowym Choose Toolbox Items w zakładce.net Framework Components naciskamy przycisk Browse...
 KORZYSTANIE Z KONTROLKI.NET LENDEVICERS232 DODAWANIE KONTROLKI DO ZBIORU KOMPONENTÓW DOSTĘPNYCH W PALECIE TOOLBOX (ŚRODOWISKA PROGRAMISTYCZNE FIRMY MICROSOFT) W środowisku programistycznym (Visual C++,
KORZYSTANIE Z KONTROLKI.NET LENDEVICERS232 DODAWANIE KONTROLKI DO ZBIORU KOMPONENTÓW DOSTĘPNYCH W PALECIE TOOLBOX (ŚRODOWISKA PROGRAMISTYCZNE FIRMY MICROSOFT) W środowisku programistycznym (Visual C++,
INSTRUKCJA PIERWSZEGO URUCHOMIENIA I KONFIGURACJI PROGRAMU StartStop w wersji SaaS. 1 S t r o n a
 INSTRUKCJA PIERWSZEGO URUCHOMIENIA I KONFIGURACJI PROGRAMU StartStop w wersji SaaS 1 S t r o n a INSTRUKCJA PIERWSZEGO URUCHOMIENIA I KONFIGURACJI PROGRAMU StartStop SAAS Konto administratora systemu zakładane
INSTRUKCJA PIERWSZEGO URUCHOMIENIA I KONFIGURACJI PROGRAMU StartStop w wersji SaaS 1 S t r o n a INSTRUKCJA PIERWSZEGO URUCHOMIENIA I KONFIGURACJI PROGRAMU StartStop SAAS Konto administratora systemu zakładane
PILOT ZDALNEGO STEROWANIA
 PODRĘCZNIK UŻYTKOWNIKA PILOT ZDALNEGO STEROWANIA R5/E-30 Ostrzeżenie. Należy upewnić się, że między pilotem a odbiornikiem urządzenia wewnętrznego nie znajdują się żadne przegrody; w przeciwnym wypadku
PODRĘCZNIK UŻYTKOWNIKA PILOT ZDALNEGO STEROWANIA R5/E-30 Ostrzeżenie. Należy upewnić się, że między pilotem a odbiornikiem urządzenia wewnętrznego nie znajdują się żadne przegrody; w przeciwnym wypadku
Dla klientów używających systemu Windows do połączeń sieciowych
 Dla klientów używających systemu Windows do połączeń sieciowych W przypadku użycia innego systemu operacyjnego lub architektury dla serwera i klienta połączenie może nie działać prawidłowo, jeśli użyte
Dla klientów używających systemu Windows do połączeń sieciowych W przypadku użycia innego systemu operacyjnego lub architektury dla serwera i klienta połączenie może nie działać prawidłowo, jeśli użyte
Konfigurowanie PPP dla Windows 7
 Konfigurowanie PPP dla Windows 7 Poniżej znajduje się instrukcja konfiguracji połączenia PPP wykonana dla systemu Windows 7. Otwieramy okno Telefon i modem z Panelu sterowania i przechodzimy do zakładki
Konfigurowanie PPP dla Windows 7 Poniżej znajduje się instrukcja konfiguracji połączenia PPP wykonana dla systemu Windows 7. Otwieramy okno Telefon i modem z Panelu sterowania i przechodzimy do zakładki
Licznik prędkości LP100 rev. 2.48
 Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Licznik prędkości LP100 rev. 2.48 Instrukcja obsługi programu PPH WObit mgr inż. Witold Ober 61-474 Poznań, ul. Gruszkowa 4 tel.061/8350-620, -800 fax. 061/8350704 e-mail: wobit@wobit.com.pl Instrukcja
Tablet graficzny XP-Pen. Windows 10, 8, 7 Mac 10.8 lub nowszy
 Tablet graficzny XP-Pen Windows 10, 8, 7 Mac 10.8 lub nowszy 1 Zawartość 1. Informacje ogólne Ogólne Obszar roboczy Pióro 2. Instalacja sterowników 3. Konfigurowanie sterownika 4. Odinstalowywanie sterowników
Tablet graficzny XP-Pen Windows 10, 8, 7 Mac 10.8 lub nowszy 1 Zawartość 1. Informacje ogólne Ogólne Obszar roboczy Pióro 2. Instalacja sterowników 3. Konfigurowanie sterownika 4. Odinstalowywanie sterowników
Wprowadzenie do programu COSIROP Programowanie w języku MELFA BASIC IV
 Wprowadzenie do programu COSIROP Programowanie w języku MELFA BASIC IV 1. Wprowadzenie 1.1. Wstęp Współczesna robotyka w dużej mierze opiera się na współpracy z komputerami klasy PC, przemysłowymi i innymi.
Wprowadzenie do programu COSIROP Programowanie w języku MELFA BASIC IV 1. Wprowadzenie 1.1. Wstęp Współczesna robotyka w dużej mierze opiera się na współpracy z komputerami klasy PC, przemysłowymi i innymi.
54. Układy współrzędnych
 54 54. Układy współrzędnych Współrzędne punktów i dostępne układy współrzędnych na płaszczyźnie (2D) omówiono w rozdziale 8. Współrzędne 2D. W tym rozdziale podane zostaną informacje dodatkowe konieczne
54 54. Układy współrzędnych Współrzędne punktów i dostępne układy współrzędnych na płaszczyźnie (2D) omówiono w rozdziale 8. Współrzędne 2D. W tym rozdziale podane zostaną informacje dodatkowe konieczne
Instrukcja programowania robota. przy użyciu programu TronZ-Card. (dla zestawu Creative)
") Instrukcja programowania robota przy użyciu programu TronZ-Card (dla zestawu Creative) 2014 Robotron Co. Ltd. & Robotyka.com Spis treści: Instalacja programu TronZ-Card... 3 Instalacja sterownika do kabla
Instrukcja programowania robota przy użyciu programu TronZ-Card (dla zestawu Creative) 2014 Robotron Co. Ltd. & Robotyka.com Spis treści: Instalacja programu TronZ-Card... 3 Instalacja sterownika do kabla
INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit
 INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit W celu uruchomienia programów DOS na Windows 7 Home Premium 64 bit lub Windows 8/8.1 można wykorzystać programy DoxBox oraz D-Fend
INSTRUKCJA INSTALACJI I URUCHOMIENIA PROGRAMÓW FINKA DOS W SYSTEMACH 64 bit W celu uruchomienia programów DOS na Windows 7 Home Premium 64 bit lub Windows 8/8.1 można wykorzystać programy DoxBox oraz D-Fend
Akceleracja symulacji HES-AHDL. 1. Rozpoczęcie pracy aplikacja VNC viewer
 Akceleracja symulacji HES-AHDL 1. Rozpoczęcie pracy aplikacja VNC viewer Rys. 1 Ultra VNCViewer Karta HES jest umieszczona w komputerze PC w pokoju 502 C-3 na serwerze VNC o adresie IP 149.156.121.112.
Akceleracja symulacji HES-AHDL 1. Rozpoczęcie pracy aplikacja VNC viewer Rys. 1 Ultra VNCViewer Karta HES jest umieszczona w komputerze PC w pokoju 502 C-3 na serwerze VNC o adresie IP 149.156.121.112.
Instalacja zaświadczeń certyfikacyjnych CERTUM PCC i CENTRAST. wersja 1.0
 Instalacja zaświadczeń certyfikacyjnych CERTUM PCC i CENTRAST wersja 1.0 Spis treści 1. KOMUNIKAT: SYSTEM WINDOWS NIE MA WYSTARCZAJĄCYCH INFORMACJI, ABY ZWERYFIKOWAĆ CERTYFIKAT....3 2. INSTALACJA ZAŚWIADCZENIA
Instalacja zaświadczeń certyfikacyjnych CERTUM PCC i CENTRAST wersja 1.0 Spis treści 1. KOMUNIKAT: SYSTEM WINDOWS NIE MA WYSTARCZAJĄCYCH INFORMACJI, ABY ZWERYFIKOWAĆ CERTYFIKAT....3 2. INSTALACJA ZAŚWIADCZENIA
Konfigurowanie sterownika BX9000 firmy Beckhoff wprowadzenie. 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BX9000
 Konfigurowanie sterownika BX9000 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BX9000 Stanowisko laboratoryjne ze sterownikiem BX9000 Sterownik BX9000 należy
Konfigurowanie sterownika BX9000 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BX9000 Stanowisko laboratoryjne ze sterownikiem BX9000 Sterownik BX9000 należy
Konfiguracja usługi OnePhone dla modelu telefonu Nokia E72
 Konfiguracja usługi OnePhone dla modelu telefonu Nokia E72 Spis treści 1. Konfi guracja Punktu Dostępowego Wi-Fi (Access Point) 2 2. Instalacja aplikacji InternetAdvSettings (uwaga: opcja) 3 3. Konfi guracja
Konfiguracja usługi OnePhone dla modelu telefonu Nokia E72 Spis treści 1. Konfi guracja Punktu Dostępowego Wi-Fi (Access Point) 2 2. Instalacja aplikacji InternetAdvSettings (uwaga: opcja) 3 3. Konfi guracja
Instrukcja użytkowania
 ASPEL S.A. PL 32-080 Zabierzów, os. H. Sienkiewicza 33 tel. +48 12 285 22 22, fax +48 12 285 30 30 www.aspel.com.pl Instrukcja użytkowania Konfiguracja bezprzewodowej komunikacji rejestratora AsPEKT 703
ASPEL S.A. PL 32-080 Zabierzów, os. H. Sienkiewicza 33 tel. +48 12 285 22 22, fax +48 12 285 30 30 www.aspel.com.pl Instrukcja użytkowania Konfiguracja bezprzewodowej komunikacji rejestratora AsPEKT 703
Programowanie sterowników
 Programowanie sterowników Wydział Elektrotechniki, Informatyki i Telekomunikacji 1 Strona 1 Ćwiczenie 1: Usuwanie projektu 1. Uruchom Windows Explorer. 2. Usuń projekt z lokalizacji na dysku: D:\Automation
Programowanie sterowników Wydział Elektrotechniki, Informatyki i Telekomunikacji 1 Strona 1 Ćwiczenie 1: Usuwanie projektu 1. Uruchom Windows Explorer. 2. Usuń projekt z lokalizacji na dysku: D:\Automation
Tablet bezprzewodowy QIT30. Oprogramowanie Macro Key Manager
 Tablet bezprzewodowy QIT30 Oprogramowanie Macro Key Manager Spis treści 1. Wprowadzenie... 3 2. Panel Sterowania - wprowadzenie... 4 3. Instalacja... 5 3.1 Jak stworzyć nowy profil... 5 3.2 Jak zmodyfikować
Tablet bezprzewodowy QIT30 Oprogramowanie Macro Key Manager Spis treści 1. Wprowadzenie... 3 2. Panel Sterowania - wprowadzenie... 4 3. Instalacja... 5 3.1 Jak stworzyć nowy profil... 5 3.2 Jak zmodyfikować
1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB
 1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB 1.1 WIZUALIZACJA WYŚWIETLACZA ORAZ OPIS PANELU STERUJĄCEGO 1.2 WŁĄCZENIE/WYŁĄCZENIE WYŚWIETLACZA Aby włączyć lub wyłączyć LCD należy nacisnąć i przytrzymać
1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB 1.1 WIZUALIZACJA WYŚWIETLACZA ORAZ OPIS PANELU STERUJĄCEGO 1.2 WŁĄCZENIE/WYŁĄCZENIE WYŚWIETLACZA Aby włączyć lub wyłączyć LCD należy nacisnąć i przytrzymać
Konfiguracja usługi OnePhone dla modelu telefonu Nokia E52
 Konfiguracja usługi OnePhone dla modelu telefonu Nokia E52 Spis treści 1. Konfi guracja Punktu Dostępowego Wi-Fi (Access Point) 2 2. Instalacja aplikacji InternetAdvSettings (uwaga: opcja) 4 3. Konfi guracja
Konfiguracja usługi OnePhone dla modelu telefonu Nokia E52 Spis treści 1. Konfi guracja Punktu Dostępowego Wi-Fi (Access Point) 2 2. Instalacja aplikacji InternetAdvSettings (uwaga: opcja) 4 3. Konfi guracja
Program Rabator dla Microsoft Windows.
 Program Rabator dla Microsoft Windows. Do czego służy program? Często zdarza się, że klient prosi o informację na temat ceny danego towaru. Pracownik posiadając jedynie ceny katalogowe musi własnoręcznie
Program Rabator dla Microsoft Windows. Do czego służy program? Często zdarza się, że klient prosi o informację na temat ceny danego towaru. Pracownik posiadając jedynie ceny katalogowe musi własnoręcznie
Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie. 1. Konfiguracja pakietu TwinCAT do współpracy z sterownikiem CX1000
 Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX1000 Sterownik CX1000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX1000 Sterownik CX1000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
37. Podstawy techniki bloków
 37 37. Podstawy techniki bloków Bloki stosujemy w przypadku projektów zawierających powtarzające się identyczne złożone obiekty. Przykłady bloków pokazano na rysunku. Zacieniowane kwadraty to tzw. punkty
37 37. Podstawy techniki bloków Bloki stosujemy w przypadku projektów zawierających powtarzające się identyczne złożone obiekty. Przykłady bloków pokazano na rysunku. Zacieniowane kwadraty to tzw. punkty
Materiały dodatkowe. Simulink Real-Time
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Programator AVR MKII. Instrukcja obsługi. Copyright by Barion www.barion-st.com 2014-05-31
 2014 Programator AVR MKII Instrukcja obsługi www.barion-st.com 2014-05-31 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest AVR MKII?... 3 1.2 Parametry techniczne... 3 1.3 Obsługiwane procesory... 4 2. BUDOWA
2014 Programator AVR MKII Instrukcja obsługi www.barion-st.com 2014-05-31 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest AVR MKII?... 3 1.2 Parametry techniczne... 3 1.3 Obsługiwane procesory... 4 2. BUDOWA
Praca w programie Power Draft
 Praca w programie Power Draft Tworzenie mapy cyfrowej w oparciu o wyznaczone w terenie współrzędne I. Przygotowanie foldera roboczego 1. Na ostatnim (alfabetycznie np. D) dysku komputera: - sprawdzić czy
Praca w programie Power Draft Tworzenie mapy cyfrowej w oparciu o wyznaczone w terenie współrzędne I. Przygotowanie foldera roboczego 1. Na ostatnim (alfabetycznie np. D) dysku komputera: - sprawdzić czy
PC0060. ADAPTER Kabel Easy Copy PC-Link USB 2.0 Proste kopiowanie, bez instalacji. Instrukcja obsługi
 PC0060 ADAPTER Kabel Easy Copy PC-Link USB 2.0 Proste kopiowanie, bez instalacji Instrukcja obsługi Rozdział 1 Produkt 1.1 Instrukcja Produkt PC0060 to najlepsze rozwiązanie w zakresie przesyłania danych.
PC0060 ADAPTER Kabel Easy Copy PC-Link USB 2.0 Proste kopiowanie, bez instalacji Instrukcja obsługi Rozdział 1 Produkt 1.1 Instrukcja Produkt PC0060 to najlepsze rozwiązanie w zakresie przesyłania danych.
Instrukcja instalacji modemu Huawei E220 dla systemu operacyjnego Mac OS X
 Instrukcja instalacji modemu Huawei E220 dla systemu operacyjnego Mac OS X Instrukcja Instalacji i konfiguracji Modemu Huawei E220 z komputerami MacBook i MacBook Pro. Ver 1.1 Spis Treści I. Instalacja
Instrukcja instalacji modemu Huawei E220 dla systemu operacyjnego Mac OS X Instrukcja Instalacji i konfiguracji Modemu Huawei E220 z komputerami MacBook i MacBook Pro. Ver 1.1 Spis Treści I. Instalacja
Problemy techniczne. Jak wyłączyć obsługę plików cookie w przeglądarkach internetowych? Przeglądarka Internet Explorer
 Problemy techniczne Jak wyłączyć obsługę plików cookie w przeglądarkach internetowych? Udostępniając treści w naszych serwisach internetowych wykorzystujemy pliki cookie (tzw. ciasteczka) na zasadach określonych
Problemy techniczne Jak wyłączyć obsługę plików cookie w przeglądarkach internetowych? Udostępniając treści w naszych serwisach internetowych wykorzystujemy pliki cookie (tzw. ciasteczka) na zasadach określonych
Dodanie strony aplikacji SAC do strefy intranetowej
 Opis konfiguracji ustawień sieci i przeglądarki dla potrzeb Statystycznej Aplikacji Centralnej (SAC) Aby móc poprawnie pracować w Statystycznej Aplikacji Centralnej musimy odpowiednio skonfigurować ustawienia
Opis konfiguracji ustawień sieci i przeglądarki dla potrzeb Statystycznej Aplikacji Centralnej (SAC) Aby móc poprawnie pracować w Statystycznej Aplikacji Centralnej musimy odpowiednio skonfigurować ustawienia