Verilog HDL. część I i II
|
|
|
- Amalia Tomaszewska
- 9 lat temu
- Przeglądów:
Transkrypt
1 Verilog HDL część I i II
2 Podstawowe cechy i zastosowania języka Verilog UmoŜliwia opisywanie złoŝonych układów cyfrowych na wysokim poziomie abstrakcji (podobnie jak język VHDL) Podobnie jak inne języki HDL dla układów cyfrowych, moŝe być stosowany zarówno do modelowania jak i syntezy Poziom abstrakcji jest prawie tak wysoki jak w języku VHDL, ale nieco niŝszy mały krok w kierunku języków typu ABEL MoŜliwy jest zarówno opis behawioralny (funkcjonalny), strukturalny (komponentowy, hierarchiczny) jak i dowolny opis mieszany, będący ich kombinacją Oparty częściowo na składni języka C Jest językiem przenośnym, obsługiwanym przez rozmaite oprogramowanie: Do budowania aplikacji w oparciu o układy programowalne, np., Active-HDL, Synopsys, Synplify, isplever, MaxPlus Do projektowania i symulacji cyfrowych układów ASIC, np. Synopsys, Envisia, Verilog-XL, Silicon Ensemble

3 Sposoby opisu sprzętu w języku Verilog Opis behawioralny (funkcjonalny) Opis algorytmiczny, wykorzystujący wysokopoziomowe konstrukcje języka Verilog Opis strukturalny: Gate-level opis na poziomie bramek logicznych oraz elementarnych komórek cyfrowych definiowanych przez uŝytkownika (UDP) Switch-level opis na tranzystorów jako kluczy oraz pojemności jako elementów pamiętających Opis hierarchiczny, wielopoziomowy, RTL

4 Ogólna struktura modułu module jk_flop_case (j, k, clock, rst, q, qb); input j, k, clock, rst; output q, qb; reg q; assign qb = ~q; (posedge clock or posedge rst) if (rst == 1'b1) q = 1'b0; else case ({j,k}) 2'b00: q = q; 2'b01: q = 1'b0; 2'b10: q = 1'b1; 2'b11: q = ~q; case module nagłówek modułu deklaracje sygnałów zewnętrznych i wewnętrznych część kombinacyjna przypisania ciągłe część sekwencyjna bloki proceduralne koniec modułu

5 Stany logiczne i wyraŝenia Dopuszczalne stany logiczne Stan wysoki (1) assign high = 1'b1; Stan niski (0) wire low = 1'b0; Stan nieokreślony (x) bus = 4'bx; Stan wysokiej impedancji (z) tbus = 16'bz Elementy składowe wyraŝeń: Sygnały Zmienne Stałe Operatory

6 Stałe liczby bez określonego rozmiaru w bitach (domyślnie zwykle 32-bit): // liczba w kodzie dziesiętnym (moŝna dodać prefiks d) 'h0fa0 'o7460 'b0101 // liczba w kodzie szesnastkowym // liczba w kodzie ósemkowym // liczba w kodzie dwójkowym liczby z określonym rozmiarem: 4'b1001 // 4-bitowa liczba w kodzie dwójkowym 8'd255 3'b10x 12'bx 16'hz // 8-bitowa liczba w kodzie dziesiętnym (d moŝna pominąć) // 3-bit liczba z najmniej znaczącą cyfrą nieokreśloną // nieokreślona liczba 12-bitowa // stan wysokiej impedancji na 16 liniach liczby ze znakiem i bez znaku: 4'd1 // 4-bitowa liczba 1 bez znaku -4'd1 // 4-bitowa liczba -1 bez znaku (czyli tak naprawdę 15) 4'sd1 // 4-bitowa liczba 1 ze znakiem -4'sd1 // 4-bitowa liczba -1 ze znakiem (traktowana jako 1) liczby zmiennoprzecinkowe: // liczba zmiennoprzecinkowa w zwykłym formacie 1.30e-2 // liczba zmiennoprzecinkowa w formacie wykładniczym łańcuchy tekstowe: "hello" // łańcuch tekstowy
 4'sd1 // 4-bitowa liczba 1 ze znakiem -4'sd1 // 4-bitowa liczba -1 ze znakiem (traktowana jako 1) liczby zmiennoprzecinkowe: 2301.")
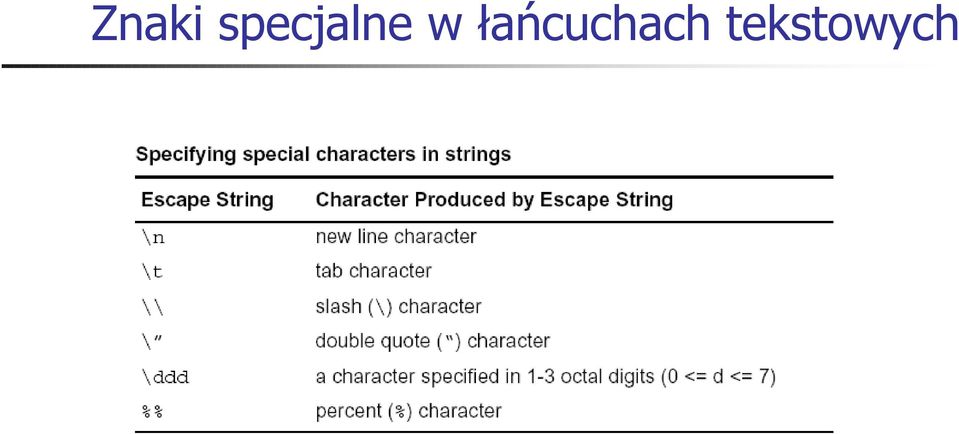
7 Znaki specjalne w łańcuchach tekstowych
8 Komentarze i makrodefinicje Ignorowanie kodu od danego miejsca do końca linii: wire w; // pominięcie kodu od tego miejsca do końca linii // pominięcie całej linii Ignorowanie całego fragmentu kodu: /* pominięcie całego fragmentu kodu */ Makrodefinicje (podstawienia): `define wordsize 8 `define greeting "hello"
: `define wordsize 8")
9 Typy sygnałów i zmiennych sygnały kombinacyjne typu net (wire, wor, wand, tri1, tri0, supply1, supply0) wire a1, a2; // zwykłe sygnały kombinacyjne wand w1, w2; // sygnały typu iloczyn galwaniczny sygnały rejestrowe typu reg reg q1, q2; // wyjścia przerzutników sygnały związane z pamięciami ulotnymi typu trireg wektory pamięci łańcuchy tekstu wire [7:0] A1, A2; // magistrale reg [0:3] R1, R2; // rejestry reg M1 [0:63]; // pamięć 64x1 reg [8*14:1] stringvar; // tekst o dł. 13 znaków + \0 zmienne całkowite typu integer integer i; // 32-bit liczba całkowita ze znakiem zmienne zmiennoprzecinkowe typu real real r; // liczba zmiennoprzecinkowa zmienne czasowe typu time (czas dyskretny) time t; // 64-bit liczba całkowita bez znaku
![A2; // magistrale reg [0:3] R1, R2; // rejestry reg M1 [0:63]; // pamięć 64x1 reg [8*14:1] stringvar; // tekst o dł.](/docs-images/41/6750625/images/page_9.jpg "13 znaków + \0 zmienne całkowite typu integer integer i; // 32-bit liczba całkowita ze znakiem zmienne zmiennoprzecinkowe typu real real r; // liczba zmiennoprzecinkowa zmienne")
10 Zmienne typu net wire/tri (sprzeczne stany dają x) wand/triand WIRED AND wor/trior WIRED OR tri0/tri1 słabe zero/jeden (pull0/pull1) tri0 net VDD pull-down pull-up tri1 net supply0/supply1 zawsze zero/jeden

11 Wektory i pamięci Wektory Pamięci UmoŜliwiają połączenie pojedynczych sygnałów w jeden ciąg: wire [11 11:0] busa, busb; // 12-bitowe magistrale reg [7:0] A, B; // 8-bitowe rejestry Domyślnie, wektory są równowaŝne liczbom całkowitym bez znaku (unsigned) Wektory mogą równieŝ odpowiadać liczbom całkowitym ze znakiem (signed): reg signed [7:0] A, B; // 8-bitowe rejestry ze znakiem Konwersje wektorów na liczby całkowite i na odwrót są wykonywane automatycznie, bez potrzeby korzystania z Ŝadnych bibliotek dodatkowych MoŜliwe jest wyłuskanie pojedynczych sygnałów lub całych fragmentów wektorów: wire [3:0] AH = A[7:4]; wire A7 = A[7]; // wyłuskanie bardziej znaczącej połowy // wyłuskanie najbardziej znaczącego bitu MoŜliwe jest scalanie (konkatenacja) wektorów ze sobą i z pojedynczymi sygnałami: reg [3:0] AH, AL; // deklaracja 4-bit rejestrów AH i AL reg E; // deklaracja przerzutnika E wire [8:0] EA = {E,AH,AL}; // połączenie w jeden 9-bit wektor EA deklaracja pamięci: reg mem1 [0:63]; // pamięć 63x1 reg [7:0] mem2 [0:255]; // pamięć 255x8
 wektorów ze sobą i z pojedynczymi")
12 Deklaracje portów (sygnałów zewnętrznych) Rodzaje portów porty wejściowe (input) porty wyjściowe (output) porty dwukierunkowe (inout) module jkff (j, k, clock, rst, q, qb); input j, k, clock, rst; // sygnały wejściowe output q, qb; // sygnały wyjściowe reg q; // bo sygnał q jest wyjściem przerzutnika... module module mux21_4 (SEL, A, B, Y); input [1:0] SEL; // magistrala sterująca input [3:0] A, B; // magistrale wejściowe output [3:0] Y; // magistrala wyjściowa... module końcówki modułu magistrale zewnętrzne
; input [1:0] SEL; // magistrala sterująca input [3:0] A, B; // magistrale wejściowe")
13 Deklaracje sygnałów wewnętrznych Rodzaje sygnałów wewnętrznych: sygnały kombinacyjne (nets) sygnały rejestrowe (registers) magistrale wewnętrzne rejestry pamięci module datapath (clock, load, ctrl, din, dout); input clock; input [1:0] ctrl; input [15:0] din; output [15:0] dout; reg [15:0] dout; wire lda, ldb, add, nand; // sygnały wewnętrzne reg [15:0] A, B; // rejestry wewnętrzne wire [15:0] busa, busb, busc; // magistrale wewnętrzne... module
![input [1:0] ctrl; input [15:0] din; output [15:0] dout; reg [15:0] dout; wire lda, ldb, add, nand; // sygnały](/docs-images/41/6750625/images/page_13.jpg "wewnętrzne reg [15:0] A, B; // rejestry wewnętrzne wire [15:0] busa, busb, busc; // magistrale wewnętrzne.")
14 Operatory i ich priorytety

15 Operatory bitowe

16 Operatory redukcyjne

17 Składnia: module Przypisania ciągłe (kombinacyjne) assign <drive_strength> <delay> net1 =... <,net2 =..., net3 =...> lub razem z deklaracją sygnału wewnętrznego: net_type <drive_strength> <delay> net1 =... <,net 2 =..., net3 =...> trireg <charge_strength> <delay> net1 =... <,net 2 =..., net3 =...> module andorinv(z, a, b, c, d); input a, b, c, d; output z; assign z = ~(a & b c & d); // przypisanie ciągłe module andorinv(z, a, b, c, d); input a, b, c, d; output z; wire ab = a & b, cd = c & d; // deklaracje z przypisaniami ciągłymi assign z = ~(ab cd); // przypisanie ciągłe module Uwaga: Po lewej stronie przypisania kombinacyjnego moŝe występować tylko sygnał typu net (wire, wand, wor, tri0, tri1) albo trireg!
; input a, b, c, d; output z; assign z = ~(a & b c & d); // przypisanie ciągłe module andorinv(z, a, b, c, d); input a, b, c, d; output z; wire")
18 Przykłady zastosowań przypisań ciągłych Sumator 4-bitowy module adder (sum_out, carry_out, carry_in, ina, inb); output [3:0] sum_out; input [3:0] ina, inb; output carry_out; input carry_in; wire carry_out, carry_in; wire[3:0] sum_out, ina, inb; assign {carry_out, sum_out} = ina + inb + carry_in; module Dekoder 2 na 4 module decoder24 (out, in); output [3:0] out; input [1:0] in; assign out[0] = ~in[1] & ~in[0]; assign out[1] = ~in[1] & in[0]; assign out[2] = in[1] & ~in[0]; assign out[3] = in[1] & in[0]; module
![{carry_out, sum_out} = ina + inb + carry_in; module Dekoder 2 na 4 module decoder24 (out, in); output [3:0] out; input [1:0] in;](/docs-images/41/6750625/images/page_18.jpg "assign out[0] = ~in[1] & ~in[0]; assign out[1] = ~in[1] & in[0]; assign out[2] = in[1] & ~in[0]; assign out[3] = in[1] & in[0];")
19 Siły wymuszania (drive strength) domyślny dla stanu niskiego supply1 7 Su1 domyślny dla stanu wysokiego

20 Przypisania ciągłe z siłą wymuszania i opóźnieniem Przypisania ciągłe z podanymi siłami wymuszania w stanie niskim i wysokim składnia: (siła_dla_stanu_wys, siła_dla_stanu_nis) lub (siła_dla_stanu_nis, siła_dla_stanu_wys) module open_drain(out, in1, in2); input in1, in2; output out; assign (pull1, strong0) out = in1; assign (pull1, strong0) out = in2; module // z wyjściem typu otwarty dren // przypisania silne w stanie niskim // i słabe w stanie wysokim Przypisania ciągłe z opóźnieniami składnia: #(opóźn_narastania <,opóźń_opadania> <,opóźń_do_st_wys_impedancji>) module delay_inv_and(out, in1, in2); input in1, in2; output out; wire #5 w1 = ~in1; // opóźnienie 5 ns dla wszystkich zboczy wire #(5,3) w2 = ~in2; // 5 ns dla zb. dod. i 3 ns dla zb. ujemn. assign #(2,3,5) out = in1 & in2; // 5 ns przy przejściu w stan wys. imped. module
; input in1, in2; output out; wire #5 w1 = ~in1; // opóźnienie 5 ns dla wszystkich zboczy wire #(5,3) w2 = ~in2; // 5 ns dla zb. dod. i 3 ns dla zb. ujemn.")
21 Uwagi do opóźnień Wszelkie konstrukcje z opóźnieniami są niesyntezowalne i mogą być wykorzystywane jedynie do modelowania i symulacji opóźnień! Reguły stosowania opóźnień są następujące: Opóźnienia są wyraŝone w domyślnych jednostkach danego symulatora JeŜeli podano tylko jeden parametr, to będzie on stosowany do określenia opóźnienia na wszystkich moŝliwych zboczach, włącznie ze stanami przejścia ze stanów x i z lub do stanów x i z; JeŜeli podano dwa parametry (pierwszy dla zbocza narastającego 0-1 i drugi dla zbocza opadającego 1-0), to czas przejścia w stan wys. impedancji (z) będzie równy dłuŝszemu z tych czasów; Czas przejścia ze stanu w stan nieokreślony (x) jest równy najkrótszemu z podanych dwóch (trzech) czasów; Opóźnienia mają charakter inercyjny, czyli jeŝeli prawa strona wyraŝenia po zmianie powróci do swojej poprzedniej wartości przed upływem podanego opóźnienia, to wartość lewej strony wyraŝenia nie ulegnie zmianie. Oznacza to, Ŝe impulsy o szerokości mniejszej od podanego opóźnienia zostaną odfiltrowane. prawa strona lewa strona opóźnienie t
22 Przypisania ciągłe z operatorem warunkowym Składnia: assign net = condition? value_if_true : value_if_false; konstrukcję z operatorem warunkowym moŝna zagnieŝdŝać w celu zbudowania konstrukcji warunkowej wielowariantowej: assign net = condition1? value_if_true : condition2? value_if_true : value_if_else; module tristate_buffer(out, in, en); // bufor trójstanowy input in, en; output out; assign out = en? in : 1'bz; // przypisanie z operatorem warunkowym module module mux41(out, din, sel); // multiplekser 4 na 1 input [1:0] sel; input [3:0] din; output out; assign out = (sel == 0)? in[0] : (sel == 1)? in[1] : (sel == 2)? in[2] : (sel == 3)? in[3] : 1'bx; module
23 Bloki proceduralne Bloki realizujące część sekwencyjną modelu odpowiedniki procesów w języku VHDL Bloki proceduralne dzielą się na: Sekwencyjne - i równoległe fork-join Wykonywane jednokrotnie initial (niesyntezowalne) i wielokrotnie always Nazwane (z etykietą) i nie nazwane (bez etykiety) Bloki proceduralne składają się z przypisań proceduralnych, realizujących operacje sekwencyjne Jeśli w jednym modelu jest wiele bloków proceduralnych, to będą one wykonywane współbieŝnie, tak jak procesy języka VHDL Wykonanie bloku jest moŝe zostać wyzwolone: Po upłynięciu danego czasu (konstrukcja niesyntezowalna) Po wystąpieniu jakiegoś zdarzenia, np. zbocza sygnału lub tzw. zdarzenia jawnego (nie wszystkie przypadki są syntezowalne) Bloki proceduralne mogą zawierać opóźnienia, jednakŝe wówczas nie są one syntezowalne i mogą być wykorzystywane jedynie do modelowania i symulacji
24 Struktura bloku proceduralnego WspółbieŜne bloki proceduralne przypisania sekwencyjne bez opóźnień przypisanie sekwencyjne z opóźnieniem przypisanie sekwencyjne z opóźnieniem module behave; reg a,b; initial a = 1'b1; b = 1'b0; always #50 a = ~a; always #100 b = ~b; module blok sekwencyjny initial blok sekwencyjny always blok sekwencyjny always Uwaga: Słowa kluczowe i moŝna pominąć, jeśli blok proceduralny zawiera tylko jedno przypisanie proceduralne
25 Blok proceduralny initial Wykonuje się tylko raz w momencie rozpoczęcia symulacji Jest niesyntezowalny i wykorzystywany głównie w modułach testujących zwanych test fixtures (odpowiednik testbench w języku VHDL) MoŜe zawierać opóźnienia (i zwykle zawiera), ale teoretycznie nie musi Opóźnienia są wyraŝone w domyślnych jednostkach symulatora, zwykle ps lub ns. Domyślną jednostkę moŝna zmienić dyrektywą `timescale : `timescale <time_unit> / <time_precision> `timescale 1 ns / 10 ps initial inputs = 'b000000; // wymuszenie w chwili 0 ns #10 inputs = 'b011001; // wymuszenie w chwili 10 ns #10 inputs = 'b011011; // wymuszenie w chwili 20 ns #10 inputs = 'b011000; // wymuszenie w chwili 30 ns #10 inputs = 'b001000; // wymuszenie w chwili 40 ns
26 Blok proceduralny always Wykonuje się na okrągło, tak więc musi zawierać przynajmniej jedno opóźnienie lub instrukcję oczekiwania na zdarzenie: Wyzwalany opóźnieniem: always #5 clk = ~clk; lub always #5 clk = ~clk; lub po prostu: always #5 clk = ~clk; ale nigdy: always clk = ~clk; Wyzwalany zboczem narastającym, opadającym lub dowolnym: a b = a; clk) q = d; clk) q = d; lub clk) q = d;
27 Blok proceduralny always (c.d.) Wyzwalany zboczami więcej niŝ jednego sygnału: rst or posedge clk) if (rst) q = 1'b0; else q = d; lub Z instrukcją oczekiwania: always wait clk) q = d; lub always wait clk) q = d; rst or posedge clk) if (rst) q = 1'b0; else q = d; ale nigdy: always wait (!latch) q = d;
28 Bloki instrukcji sekwencyjne i równoległe Blok sekwencyjny - Przypisania są wykonywane po kolei Opóźnienie jest liczone od zakończenia poprzedniego przypisania r = 4'h0; // t = 0 #10 r = 4'h2; // t = 10 ns #10 r = 4'h4; // t = 20 ns #10 r = 4'h8; // t = 30 ns Blok równoległy fork-join Przypisania są wykonywane współbieŝnie Wszystkie opóźnienia są liczone względem początku bloku fork r = 4'h0; // t = 0 #10 r = 4'h2; // t = 10 ns #20 r = 4'h4; // t = 20 ns #30 r = 4'h8; // t = 30 ns join
29 Intra-assignments Zastosowanie do zapobiegania wyścigom: fork #5 a = b; // rezultat będzie #5 b = a; // przypadkowy join fork a = #5 b; // nastąpi zamiana b = #5 a; // wartości a i b join
30 Przypisania nieblokujące Wykonywanie tego przypisania nie wstrzymuje wykonywania następnych instrukcji
31 Przypisania nieblokujące (c.d.)
32 Mieszanie przypisań blokujących i nieblokujących
33 Pytanie: Czy obydwa przykłady są równowaŝne? reg a, b; a <= b; b <= a;? reg a, b; fork a = b; b = a; join
34 Przypisania warunkowe Instrukcja warunkowa if-else Konstrukcja wielowariantowa if-else-if if (sel) C = A + B; else C = A - B; if (state == PASS1) A = A1 + A2; state = PASS2; else A = A + A1 + A2; state = PASS1; if (state == RED) RYG = 3'b100; state = RED_YELLOW; else if (state == RED_YELLOW) RYG = 3'b110; state = GREEN; else if (state == GREEN) RYG = 3'b001; state = YELLOW; else RYG = 3'b010; state = RED;
35 Konstrukcje wielodecyzyjne case/casez/casex Instrukcja case reg [15:0] rega; reg [9:0] result;... case (rega) 16'd0: result = 10 b ; 16'd1: result = 10 b ; 16'd2: result = 10 b ; 16'd3: result = 10 b ; 16'd4: result = 10 b ; 16'd5: result = 10 b ; 16'd6: result = 10 b ; 16'd7: result = 10 b ; 16'd8: result = 10 b ; 16'd9: result = 10 b ; default result = bx; case UWAGA: Instrukcja case traktuje stany z i x tak samo jak stany 0 i 1 Instrukcja casez przy porównaniu ignoruje bity w stanie z reg [7:0] ir;... casez (ir) 8'b1???????: instruction1(ir); 8'b01??????: instruction2(ir); 8'b00010???: instruction3(ir); 8'b000001??: instruction4(ir); case Instrukcja casex przy porównaniu ignoruje bity w stanach z i x reg [7:0] r, mask;... mask = 8 bx0x0x0x0; casex (r ^ mask) 8'b001100xx: stat1; 8'b1100xx00: stat2; 8'b00xx0011: stat3; 8'bxx001100: stat4; case
36 Przykłady zastosowania bloków proceduralnych Przerzutnik D z kasowaniem asynchronicznym module dffar (Q, nq, rst, clk, D); output Q, nq; input rst, clk, D; reg Q; assign nq = ~Q; rst or posedge clk) if (rst) Q = 1'b0; else Q = D; module Przerzutnik JK z kasowaniem asynchronicznym module jkffar (Q, nq, rst, clk, J, K); output Q, nq; input rst, clk, J, K; reg Q; assign nq = ~Q; rst or posedge clk) if (rst) Q = 1'b0; else case ({J,K}) 2'b01: Q = 1'b0; 2'b10: Q = 1'b1; 2'b11: Q = ~Q; default Q = Q; case module
37 Pętle Pętla repeat initial repeat (10) $display("i= %d", i); i = i + 1; Pętla while always #10 i = 0; while (i < 10) $display("i= %d", i); i = i + 1; Pętla forever initial counter = 0; forever #10 counter = counter + 1; Pętla for always #10 for (i = 1; i < 16; i = i+1) $display("i= %d", i);
38 Syntezowalny kod zawierający pętlę Komparator z pętlą for, przerywaną instrukcją disable: module comparator_with_loop (a, b, a_gt_b, a_lt_b, a_eq_b); parametersize = 2; input[size: 1] a, b; outputa_gt_b, a_lt_b, a_eq_b; rega_gt_b, a_lt_b, a_eq_b; etykieta bloku jest wymagana integer k; (a or b) : compareloop module for (k = size; k > 0; k = k-1) if (a[k]!= b[k]) warunkowe przerwanie działania bloku compareloop a_gt_b = a[k]; a_lt_b = ~a[k]; a_eq_b = 0; disable compareloop; // if // for loop a_gt_b = 0; a_lt_b = 0; a_eq_b =1; // compare loop
39 Proceduralne przypisania ciągłe Konstrukcja assign-deassign Stosowana do modelowania sprzętu, np. układów z asynchronicznym kasowaniem module dff(q,d,clear,preset,clock); output q; input d,clear,preset,clock; reg q; or preset) if(!clear) assign q = 0; // asynchroniczne kasowanie else if(!preset) assign q = 1; // asynchroniczne ustawianie else deassign q; // odblokowanie przerzutnika po skasowaniu/ustawieniu clock) q = d; // klasyczne przypisanie proceduralne module Konstrukcja force-release Stosowana w symulacji do uruchamiania (debuggowania) projektów Ma wyŝszy priorytet niŝ assign-deassign
40 Węzeł typu trireg: Modelowanie pamięci dynamicznych MoŜe znajdować się w jednym z dwóch stanów: Stan wymuszony (driven state), jeŝeli przynajmniej jedno z wymuszeń jest w stanie 0, 1 lub X. Wówczas węzeł propaguje stan wynikający z wymuszeń. Stan pojemnościowy (capacitive state), kiedy wszystkie wymuszenia są w stanie wys. impedancji (Z). Wówczas węzeł pamięta poprzedni stan. Typ trireg stoi po lewej stronie przypisań ciągłych i dlatego jest często klasyfikowany jako podtyp typu net W stanie wymuszonym, siły wymuszeń mogą być ustawione na strong, pull albo weak W stanie pojemnościowym, węzeł typu trireg moŝe stanowić wymuszenie o róŝnej sile (charge strength): small, medium lub large, co jest bezpośrednio związane z wartością pojemności komórki pamięci dynamicznej W stanie pojemnościowym, stan węzła moŝe utrzymywać się w nieskończoność (pojemność idealna) lub po pewnym czasie moŝe ulec zniszczeniu (charge decay), czyli przejściu w stan nieokreślony (X) (pojemność z upływem) 1 0 wej = 0,1,x wyj = wej wyj = st. poprz. nmos (wł) C nmos (wył) C węzeł trireg w stanie wymuszonym węzeł trireg w stanie pojemnościowym
41 Symulacja działania węzła typu trireg
42 Przykłady zastosowania węzła typu trireg reg data1, data2, select; trireg c1; // deklaracja węzła c1 o pojemności medium // i o nieskończonym czasie podtrzymania trireg (small) #(0,0,1000) c2; // deklaracja węzła c2 o pojemności small // i z czasem podtrzymania 1000 ns initial data = 1'b1 siła wymuszenia w stanie poj. (wielkość ładunku) czas podtrzymania informacji w c2 assign c1 = select? data1 : 1'bz; // sygnal select przelacza c1 i c2 pomiedzy assign c2 = select? data2 : 1'bz; // stanem wymuszanym a pojemnościowym // wymuszenie stanu 1 na węzłach c1 i c2 #0 select = 1'b1; // ustawienie c1 i c2 w stan wymuszany #50 select = 1'b0; // przestawienie c1 i c2 w stan pojemnościowy // (zapamiętany stan 1) po 50 ns
43 Modelowanie pamięci dynamicznych (przykład) Komórka pamięci dynamicznej `timescale 1ns / 10 ps module dram_cell(data, wl, rw); inout data; input wl; input rw; wire bit; trireg #(0,0,8000) mem; // wejście/wyjście danych // selektor komórki (word line) // 1 zapis, 0 - odczyt // deklaracja komórki pamięci assign mem = wl? bit : 1'bz; // zapis do komórki assign (weak0,weak1) bit = wl? mem : 1'bz; // odczyt z komórki assign bit = rw? data : 1'bz; assign data = rw? 1'bz : bit; module
44 Symulacja działania sieci pojemnościowej 1. At simulation time 0, wire a and wire b have a value of 1. The wire c drives a value of 1 into triregs la and sm, wire d drives a value of 1 into triregs me1 and me2. 2. At simulation time 10, the value of wire b changes to 0, disconnecting trireg sm and me2 from their drivers. These triregs enter the capacitive state and store the value 1; their last driven value. 3. At simulation time 20, wire c drives a value of 0 into trireg la. 4. At simulation time 30, wire d drives a value of 0 into trireg me1. 5. At simulation time 40, the value of wire a changes to 0, disconnecting trireg la and me1 from their drivers. These triregs enter the capacitive state and store the value At simulation time 50, the value of wire b changes to 1. This change of value in wire b connects trireg sm to trireg la; these triregs have different sizes and stored different values. This connection causes the smaller trireg to store the larger trireg value and trireg sm now stores a value of 0.This change of value in wire b also connects trireg me1 to trireg me2; these triregs have the same size and stored different values. The connection causes both trireg me1 and me2 to change value to x.
45 Symulacja współdzielenia ładunku 1. At simulation time 0, the value of wire a, b, and c is 1 and wire a drives a strong 1 into trireg la and sm. 2. At simulation time 10, the value of wire b changes to 0, disconnecting trireg la andsm from wire a. The triregs la and sm enter the capacitive state. Both triregs share the large charge of trireg la because they remain connected throughtranif2. 3. At simulation time 20, the value of wire c changes to 0, disconnecting trireg sm fromtrireg la. The trireg sm no longer shares the large charge of trireg la and now stores a small charge. 4. At simulation time 30, the value of wire c changes to 1, connecting the two triregs. These triregs now share the same charge. 5. At simulation time 40, the value of wire c changes again to 0, disconnecting trireg sm from trireg la. Once again, trireg sm no longer shares the large value oftrireg la and now stores a small charge.
46 Zadania Są to procedury składające się z instrukcji sekwencyjnych, takich jakie występują w blokach proceduralnych Mogą przyjmować zero lub więcej argumentów dowolnego typu: input, output lub inout Przy wywołaniu zadania, jeśli argument jest typu input, moŝe zostać do niego podstawiony dowolny rodzaj danej, wyraŝenie lub stała Jeśli argument jest typu inout lub output, podstawiona dana jest ograniczona do tylko tych typów, które mogą znajdować się po lewej stronie przypisania proceduralnego, a więc rejestrów, odwołań do pamięci oraz ich dowolnych fragmentów i połączeń (konkatenacji) Definicja zadania: module this_task; task my_task; input a, b; inout c; output d, e; reg foo1, foo2, foo3; <statements> c = foo1; d = foo2; e = foo3; task module Wywołanie zadania: my_task (v, w, x, y, z); // the set of statements that performs the work of the task // the assignments that initialize // the results variables
47 Zadania - przykład module SHREG4(CLK, S, IN, IL, IR, Q); input [3:0] IN; input [1:0] S; input CLK, IL, IR; output [3:0] Q; reg [3:0] Q; parameter left = 0, right = 1; task load; Q = IN; task task shift; input direction; if (direction) Q = {IL,Q[3:1]}; else Q = {Q[2:0],IR}; task // load contents into the register // 0 - shift left, 1 - shift right // shift right register contents // shift left register contents CLK) case (S) 2'b00: ; 2'b11: load; 2'b01: shift(right); 2'b10: shift(left); default: Q = 4'bx; case module // main procedural block // do nothing // load contents // shift right // shift left // unhandled states
48 Funkcje przykład 1 Funkcja obliczająca liczbę jedynek w 4-bitowym słowie przykład syntezowalny module test_ones (in, out); input [3:0] in; output [2:0] out; function [2:0] get_ones; input [3:0] operand; get_ones = operand[0] + operand[1] + operand[2] + operand[3]; function assign out = get_ones(in); module
49 Funkcje przykład 2 Funkcja obliczająca 2 n przykład niesyntezowalny module test_power2; reg [4:0] value; reg [5:0] n; function [31:0] power2; input [4:0] exponent; reg [4:0] index; power2 = 1; for(index = 0; index < exponent; index = index + 1) power2 = power2 * 2; function initial for(n = 0; n <= 31; n = n + 1) module $display("2^%0d = %0d", n, power2(n));
50 Ograniczenia funkcji Funkcje nie mogą zawierać Ŝadnych instrukcji sterowanych przez czas, czyli Ŝadnych instrukcji poprzedzonych przez lub wait. Funkcje nie mogą uruchamiać zadań. Funkcje muszą posiadać przynajmniej jeden argument typu input. Lista argumentów funkcji nie moŝe zawierać argumentów typu inout ani output. Funkcja musi zawierać przypisanie wyniku funkcji do wewnętrznej (lokalnej) zmiennej o takiej samej nazwie co nazwa funkcji (przypisanie to jest zwykle na końcu). Zadania a funkcje: Funkcja musi się wykonać w jednej chwili czasowej symulacji, natomiast zadanie moŝe zawierać instrukcje czasowe lub wait). Podczas gdy funkcja nie moŝe uruchamiać zadania, zadanie moŝe uruchamiać funkcje i inne zadania. Funkcja musi mieć przynajmniej jeden argument typu input, natomiast zadanie moŝe mieć zero lub więcej argumentów dowolnego typu. Funkcja zwraca wartość, natomiast zadanie nie zwraca Ŝadnej wartości.
51 Zdarzenia jawne Wykorzystywane jako semafory synchronizujące współbieŝne bloki proceduralne: module test_ones (dl, din, dout); input dl; input [7:0] din; output [7:0] dout; event latch; dl) ->latch; deklaracja zdarzenia jawnego wywołanie zdarzenia jawnego dout = din; instrukcja oczekująca na zdarzenie jawne module
52 Opis strukturalny Rodzaje opisu strukturalnego: Opis na poziomie bramek logicznych i kluczy (gate- and switch-level description) Modelowanie z wykorzystaniem prostych układów kombinacyjnych lub sekwencyjnych definiowanych przez uŝytkownika (UDP) Opis hierarchiczny (wielopoziomowy) Makromoduły Wbudowane elementy podstawowe: Bramki AND, OR, NAND, NOR, XOR, XNOR Inwertery i bufory dwustanowe i trójstanowe Klucze MOS i CMOS Dwukierunkowe bramki transmisyjne Rezystory pull-up i pull-down
53 Składnia opisu na poziomie bramek i kluczy Z etykietami i jawną deklaracją sygnałów wewnętrznych Bez etykiet i niejawną deklaracją sygnałów wewnętrznych a b c d and1 and2 ab cd or1 y a b c d ab cd y module and_or (y, a, b, c, d); output y; input a, b, c, d; wire ab, cd; and and1 (ab, a, b); and and2 (cd, c, d); or or1 (y, ab, cd); deklaracje sygnałów wew. etykieta elementu (opcjonalna) module and_or (y, a, b, c, d); output y; input a, b, c, d; and (ab, a, b); and (cd, c, d); or (y, ab, cd); module module sygnały wejściowe sygnał wyjściowy
54 Składnia opisu na poziomie bramek i kluczy Komponenty z opóźnieniami i róŝnymi siłami wymuszania a b #(5,3) and1 ab #(5,5) c d and2 cd #(5,3) or1 y module and_or (y, a, b, c, d); output y; input a, b, c, d; wire ab, cd; opóźnienie przy przejściu w stan wysoki i niski and (strong0,strong1) #(5,3) and1 (ab, a, b); and (strong0,strong1) #(5,3) and2 (cd, c, d); or (strong0,strong1) #5 or1 (y, ab, cd); module siła wymuszenia przy przejściu z w stan wysoki siła wymuszenia przy przejściu z w stan niski
55 Ciągi elementów Bez ciągów elementów Z ciągiem elementów en in[3] ar3 out[3] in[2] ar2 out[2] en in[3:0] in[1] ar1 out[1] out[3:0] in[3:0] ar[3:0] out[3:0] in[0] ar0 out[0] module driver (in, out, en); input [3:0] in; output [3:0] out; input en; bufif0 ar3 (out[3], in[3], en); bufif0 ar2 (out[2], in[2], en); bufif0 ar1 (out[1], in[1], en); bufif0 ar0 (out[0], in[0], en); module module driver (in, out, en); input [3:0] in; output [3:0] out; input en; bufif0 ar[3:0] (out, in, en); module
56 Bramki logiczne (1) Bramki AND, OR, NAND, NOR, XOR and AND1 (z, a, b); // 2-wejściowa bramka AND z etykietą AND1 nand NA1 (z, a, b, c); // 3-wejściowa bramka NAND z etykietą NA1 xnor (y, v, w); // 2-wejściowa bramka XNOR bez etykiety nor #(1,2) (z, a, b); // 2-wejściowa bramka NOR z opóźnieniami or (strong0,pull1) (z, a, b) // 2-wejściowa bramka OR z siłami wymuszania
57 Bramki logiczne (2) Inwertery i bufory not NEG1 (out, in); // pojedynczy inwerter z etykietą NEG1 buf (out1,out2,in); // pojedynczy bufor bez etykiety not NEG[3:0] (C, A[3:0]); // 4 równoległe inwertery buf (o1, o2, o3, o4, i); // bufor z czterema wyjściami i jednym wyjściem
58 Bufory i inwertery trójstanowe Bramki logiczne (3) bufif0 (weak1,pull0) #(4,5,3) (data_out, data_in, ctrl); sygnał wyjściowy sygnał sterujący sygnał wejściowy
59 Klucze MOS Klucze NMOS i PMOS bez rezystancji (nmos, pmos) z rezystancją (rnmos, rpmos) redukują siłę sygnału pmos (w, datain, pcontrol); // klucz PMOS bez rezystancji sygnał wyjściowy sygnał sterujący sygnał wejściowy Klucze CMOS (cmos, rcmos) cmos (w, datain, ncontrol, pcontrol); pcontrol jest równowaŝne zapisowi: datain w nmos (w, datain, ncontrol); pmos (w, datain, pcontrol); ncontrol
60 Przykład zastosowania kluczy MOS 3-wejściowa bramka NAND module nand3 (z, a, b, c); output z; input a, b, c; // wyjście // wejścia a b c z supply0 gnd; supply1 pwr; // masa // zasilanie MP1 MP2 MP3 nmos MN1 (z, i12, a); // sekcja nmos MN2 (i12, i23, b); // pull-down nmos MN3 (i23, gnd, c); a MN1 z pmos MP1 (z, pwr, a); pmos MP2 (z, pwr, b); pmos MP3 (z, pwr, c); // sekcja // pull-up b c MN2 MN3 module
61 Dwukierunkowe bramki transmisyjne Nie przyjmują specyfikacji siły wymuszania Rodzaje dwukierunkowych bramek transmisyjnych: Dwukierunkowe bramki przewodzące przez cały czas (nie przyjmują opóźnień): tran redukuje siłę supply na strong, a pozostałe pozostawia bez zmian rtran redukuje siłę supply na pull, pull na weak, itd. Klucze aktywne stanem niskim (tranif0, rtranif0) Klucze aktywne stanem wysokim (tranif1, rtranif1) tran tr1 (inout1, inout2); tranif1 #100 trf1 (inout1,inout2, control); control sygnał sterujący sygnały dwukierunkowe inout1 trf1 inout2
62 Elementy definiowane przez uŝytkownika (UDP) UDP są prostymi układami kombinacyjnymi lub sekwencyjnymi definiowanymi przez uŝytkownika, których uŝywa się w taki sam sposób jak elementów wbudowanych Mogą posiadać tylko jedno wyjście (pojedynczy sygnał), a wejścia mogą być jedynie pojedynczymi sygnałami (nie mogą być magistralami) Dla sekwencyjnego UDP, jego stan odpowiada stanowi pojedynczego przerzutnika (0, 1 lub x) i jest jednocześnie sygnałem wyjściowym Działanie kombinacyjnego UDP określa się tablicą prawdy, a sekwencyjnego UDP tablicą przejść // Description of an AND-OR gate. // out = (a1 & a2 & a3) (b1 & b2). primitive and_or(out, a1,a2,a3,b1,b2); output out; input a1,a2,a3, b1,b2; table // a b : out ; 111?? : 1 ;??? 11 : 1 ; 0?? 0? : 0 ; 0???0 : 0 ;?0? 0? : 0 ;?0??0 : 0 ;??0 0? : 0 ;??0?0 : 0 ; table primitive wyjście wejścia
63 Oznaczenia występujące w tablicach UDP
64 Kombinacyjne UDP Multiplekser 2 na 1 primitive multiplexer(mux, control, dataa, datab ); output mux; input control, dataa, datab; table // control dataa datab mux : 1 ; : 1 ; 0 1 x : 1 ; : 0 ; : 0 ; 0 0 x : 0 ; : 1 ; : 1 ; 1 x 1 : 1 ; : 0 ; : 0 ; 1 x 0 : 0 ; x 0 0 : 0 ; x 1 1 : 1 ; table primitive tablica prawdy
65 Kombinacyjne UDP ze skróconym opisem Ten sam multiplekser 2 na 1 primitive multiplexer(mux,control,dataa,datab ); output mux; input control, dataa, datab; table // control dataa datab mux 0 1? : 1 ; //? = 0,1,x 0 0? : 0 ; 1? 1 : 1 ; 1? 0 : 0 ; x 0 0 : 0 ; x 1 1 : 1 ; table primitive? = dowolny stan: 0, 1 lub x
66 Sekwencyjne UDP wraŝliwe na poziomy Zatrzask (przerzutnik D wyzwalany poziomem) primitive latch(q, clock, data); output q; reg q; input clock, data; table // clock data q q+ 0 1 :? : 1 ; 0 0 :? : 0 ; 1? :? : - ; // - = no change table primitive deklaracja stanu tablica przejść
67 Sekwencyjne UDP wraŝliwe na zbocza Przerzutnik D wyzwalany zboczem narastającym primitive d_edge_ff(q, clock, data); output q; reg q; input clock, data; table // obtain output on rising edge of clock // clock data q q+ (01) 0 :? : 0 ; (01) 1 :? : 1 ; (0?) 1 : 1 : 1 ; (0?) 0 : 0 : 0 ; // ignore negative edge of clock (?0)? :? : - ; // ignore data changes on steady clock? (??) :? : - ; table primitive
68 UDP wraŝliwe zarówno na poziomy jak i zbocza Przerzutnik D wyzwalany zboczem narastającym i ustawianiem i kasowaniem primitive jk_edge_ff(q, clock, j, k, preset, clear); output q; reg q; input clock, j, k, preset, clear; table //clock jk pc state output/next state??? 01 :? : 1 ; //preset logic??? *1 : 1 : 1 ;??? 10 :? : 0 ; //clear logic??? 1* : 0 : 0 ; r : 0 : 1 ; //normal clocking cases r :? : - ; r :? : 0 ; r :? : 1 ; r : 0 : 1 ; r : 1 : 0 ; f???? :? : - ; b *??? :? : - ; //j and k transition cases b?*?? :? : - ; table primitive
69 Zmniejszanie pesymizmu w UDP Zatrzask typu D primitive latch(q, clock, data); output q; reg q ; input clock, data ; table // clock data state output/next state 0 1 :? : 1 ; 0 0 :? : 0 ; 1? :? : - ; // - = no change // ignore x on clock when data equals state x 0 : 0 : - ; x 1 : 1 : - ; table primitive Przerzutnik JK primitive jk_edge_ff(q, clock, j, k, preset, clear); output q; reg q; input clock, j, k, preset, clear; table // clock jk pc state output/next state // preset logic??? 01 :? : 1 ;??? *1 : 1 : 1 ; // clear logic??? 10 :? : 0 ;??? 1* : 0 : 0 ; // normal clocking cases r : 0 : 1 ; r :? : - ; r :? : 0 ; r :? : 1 ; r : 0 : 1 ; r : 1 : 0 ; f???? :? : - ; // j and k cases b *??? :? : - ; b?*?? :? : - ; // cases reducing pessimism p :? : - ; p 0? 1? : 0 : - ; p?0?1 : 1 : - ; (?0)???? :? : - ; (1x)00 11 :? : - ; (1x)0? 1? : 0 : - ; (1x)?0?1 : 1 : - ; x *0?1 : 1 : - ; x 0* 1? : 0 : - ; table primitive
70 Struktury hierarchiczne (wielopoziomowe) Moduły na niŝszym poziomie hierarchii: Moduł na wyŝszym poziomie hierarchii: module AND (out, in1, in2); output out; input in1, in2; assign out = in1 & in2; module module OR (out, in1, in2); output out; input in1, in2; Niejawne mapowanie portów (przez zachowanie tej samej kolejności portów i odpowiadających im sygnałów) module AND_OR (y, x1,x2, x3, x4); output y; input x1, x2, x3, x4; AND A1 (x12, x1, x2); AND A2 (x34, x3, x4); OR O1 (y, x12, x34); module assign out = in1 in2; module Jawne mapowanie portów (przez określenie które porty mają być podłączone do których sygnałów) module AND_OR (y, x1,x2, x3, x4); output y; input x1, x2, x3, x4; AND A1 (.in1(x1),.in2(x2),.out(x12)); AND A2 (.in1(x3),.in2(x4),.out(x34)); OR O1 (.in1(x12),.in2(x34),.out(y)); module
71 Moduły parametryzowane Moduł na niŝszym poziomie hierarchii z parametrami size i delay: Moduł na wyŝszym poziomie hierarchii deklarujący komponenty z parametrami: module vdff (out, in, clk); parameter size = 1, delay = 1; input [0:siz size-1] in; input clk; output [0:size size-1] out; reg [0:size size-1] out; clk) # delay out = in; module module m; reg clk; wire[1:10] out_a, in_a; wire[1:5] out_b, in_b; // create an instance and set parameters vdff #(10,15) mod_a(out_a, in_a, clk); // create an instance leaving default values vdff mod_b(out_b, in_b, clk); module
72 Makromoduły Są spłaszczane w celu przyspieszenia wykonywania symulacji, czyli nie otrzymują nazwy instancji, nie ma podłączenia portów do sygnałów i makro znajduje się na tym samym poziomie hierarchii co moduł nadrzędny Podlegają pewnym ograniczeniom Nie moŝna w nich deklarować rejestrów ani stosować przypisań proceduralnych W listach sygnałów wbudowanych bramek i elementów UDP nie mogą znajdować się wyraŝenia, lecz jedynie pojedyncze sygnały Jedynym dopuszczalnym wykorzystaniem parametrów jest uŝycie ich do określania opóźnień w makromodule module topmod; wire [4:0] v; wire a,b,c,w; modb b1 (v[0], v[3], w, v[4]); initial $list; module macromodule modb(wa, wb, c, d); inout wa, wb; input c, d; parameter d1=6, d2=5; parameter d3=2, d4=6; tranif1 g1(wa, wb, cinvert); not #(d3, d4) (cinvert, int); and #(d1, d2) g2(int, c, d); module
Projektowanie scalonych systemów wbudowanych VERILOG. VERLIOG - historia
 Projektowanie scalonych systemów wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Projektowanie scalonych systemów wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Projektowanie Scalonych Systemów Wbudowanych VERILOG OPIS BEHAWIORALNY proces Proces wątek sterowania lub przetwarzania danych, niezależny w sensie czasu wykonania, ale komunikujący się z innymi procesami.
Język HDL - VERILOG. (Syntetyzowalna warstwa języka) Hardware Description Language Krzysztof Jasiński PRUS PRUS
 Hardware Description Language Krzysztof Jasiński PRUS PRUS") Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS Język VERLOG w praktyce RUS RUS VERLOG Specyfikacja układów kombinacyjnych RUS RUS Operator warunkowy Conditional_expression?
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Projektowanie Scalonych Systemów Wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Projektowanie Scalonych Systemów Wbudowanych VERILOG
 Projektowanie Scalonych Systemów Wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Projektowanie Scalonych Systemów Wbudowanych VERILOG VERLIOG - historia Początki lat 80 XX w. Phil Moorby Gateway Design Automation symulator Verilog XL 1987 Synopsys Verilog jako język specyfikacji projektu
Laboratorium Podstaw Techniki Cyfrowej
 Laboratorium Podstaw Techniki Cyfrowej Ćwiczenie 5: Wprowadzenie do języków opisu sprzętu 1. Języki opisu sprzętu Języki opisu sprzętu(hdl Hardware Description Language) to języki słuŝące do opisu układów
Laboratorium Podstaw Techniki Cyfrowej Ćwiczenie 5: Wprowadzenie do języków opisu sprzętu 1. Języki opisu sprzętu Języki opisu sprzętu(hdl Hardware Description Language) to języki słuŝące do opisu układów
Język HDL - VERILOG. (Syntetyzowalna warstwa języka) Hardware Description Language Krzysztof Jasiński PRUS PRUS
 Hardware Description Language Krzysztof Jasiński PRUS PRUS") Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS VERLOG rzegląd zagadnień RUS RUS prowadzenie do języka Reprezentacja układu cyfrowego w Verilogu opis strukturalny
Język HDL - VERLOG Hardware Description Language (Syntetyzowalna warstwa języka) RUS RUS VERLOG rzegląd zagadnień RUS RUS prowadzenie do języka Reprezentacja układu cyfrowego w Verilogu opis strukturalny
Programowalne układy logiczne kod kursu: ETD Podstawy języka Verilog W
 Programowalne układy logiczne kod kursu: ETD008270 Podstawy języka Verilog W2 2.03.2018 mgr inż. Maciej Rudek 2 Tematyka kursu wykład Poziom abstrakcji systemów opisu sprzętu Historia Verilog został stworzony
Programowalne układy logiczne kod kursu: ETD008270 Podstawy języka Verilog W2 2.03.2018 mgr inż. Maciej Rudek 2 Tematyka kursu wykład Poziom abstrakcji systemów opisu sprzętu Historia Verilog został stworzony
Przykładowe pytania z części PSPICE. 1. Podaj zasady tworzenia pliku symulacyjnego. 2. Czy składnia PSPICE jest czuła na wielkość liter? 3.
 Przykładowe pytania z części PSPICE. 1. Podaj zasady tworzenia pliku symulacyjnego. 2. Czy składnia PSPICE jest czuła na wielkość liter? 3. Jak umieszcza się komentarze w pliku symulacyjnym PSPICE? 4.
Przykładowe pytania z części PSPICE. 1. Podaj zasady tworzenia pliku symulacyjnego. 2. Czy składnia PSPICE jest czuła na wielkość liter? 3. Jak umieszcza się komentarze w pliku symulacyjnym PSPICE? 4.
Konwencje językowe Verilog-a APSC
 Konwencje językowe Verilog-a APSC Podstawowe konwencje są takie same jak w C. Elementami języka są: komentarze, ograniczniki, liczby, ciągi znaków, identyfikatory i słowa kluczowe. Verilog rozróżnia małe
Konwencje językowe Verilog-a APSC Podstawowe konwencje są takie same jak w C. Elementami języka są: komentarze, ograniczniki, liczby, ciągi znaków, identyfikatory i słowa kluczowe. Verilog rozróżnia małe
Język Verilog w projektowaniu układów FPGA
 POLITECHNIKA ZIELONOGÓRSKA Wydział Elektryczny Język Verilog w projektowaniu układów FPGA Jacek Bieganowski Grzegorz Wawrzyniak Promotor: dr inż. Marek Węgrzyn Zielona Góra, czerwiec 2001 Spis treści 1.
POLITECHNIKA ZIELONOGÓRSKA Wydział Elektryczny Język Verilog w projektowaniu układów FPGA Jacek Bieganowski Grzegorz Wawrzyniak Promotor: dr inż. Marek Węgrzyn Zielona Góra, czerwiec 2001 Spis treści 1.
Systemy wbudowane. Projektowanie systemów wbudowanych na bazie układów CPLD/FPGA Język opisu sprzętu Verilog cz.1
 Systemy wbudowane Projektowanie systemów wbudowanych na bazie układów CPLD/FPGA Język opisu sprzętu Verilog cz.1 System Quartus II Opis projektu Tekstowy (język opisu sprzętu np. Verilog) Graficzny Wykresy
Systemy wbudowane Projektowanie systemów wbudowanych na bazie układów CPLD/FPGA Język opisu sprzętu Verilog cz.1 System Quartus II Opis projektu Tekstowy (język opisu sprzętu np. Verilog) Graficzny Wykresy
1 Wstęp. 2 Proste przykłady. 3 Podstawowe elementy leksykalne i typy danych. 6 Opis strukturalny. 7 Moduł testowy (testbench)
") Wstęp SYSTEMY WBUDOWANE Układy kombinacyjne c Dr inż. Ignacy Pardyka UNIWERSYTET JANA KOCHANOWSKIEGO w Kielcach Rok akad. 2011/2012 c Dr inż. Ignacy Pardyka (Inf.UJK) Systemy wbudowane Rok akad. 2011/2012
Wstęp SYSTEMY WBUDOWANE Układy kombinacyjne c Dr inż. Ignacy Pardyka UNIWERSYTET JANA KOCHANOWSKIEGO w Kielcach Rok akad. 2011/2012 c Dr inż. Ignacy Pardyka (Inf.UJK) Systemy wbudowane Rok akad. 2011/2012
AHDL - Język opisu projektu. Podstawowe struktury języka. Komentarz rozpoczyna znak i kończy znak %. SUBDESIGN
 AHDL - Język opisu projektu. Podstawowe struktury języka Przykładowy opis rewersyjnego licznika modulo 64. TITLE "Licznik rewersyjny modulo 64 z zerowaniem i zapisem"; %------------------------------------------------------------
AHDL - Język opisu projektu. Podstawowe struktury języka Przykładowy opis rewersyjnego licznika modulo 64. TITLE "Licznik rewersyjny modulo 64 z zerowaniem i zapisem"; %------------------------------------------------------------
Sumatory H D L. dr inŝ. Paweł Tomaszewicz Instytut Telekomunikacji Politechnika Warszawska
 Sumatory 1 Sumator 1-bitowy full adder Równanie boolowskie sumy: s k = a k XOR b k XOR c k = a k b k c k Równanie boolowskie przeniesienia: c k+1 = (a k AN b k ) OR (a k AN c k ) OR (b k AN c k ) = (a
Sumatory 1 Sumator 1-bitowy full adder Równanie boolowskie sumy: s k = a k XOR b k XOR c k = a k b k c k Równanie boolowskie przeniesienia: c k+1 = (a k AN b k ) OR (a k AN c k ) OR (b k AN c k ) = (a
Synteza logiczna APSC
 Jest to proces tłumaczenia opisu projektu przygotowanego na wysokim poziomie abstrakcji na zoptymalizowaną reprezentację na poziomie bramek logicznych w oparciu o zadaną technologiczną bibliotekę komórek
Jest to proces tłumaczenia opisu projektu przygotowanego na wysokim poziomie abstrakcji na zoptymalizowaną reprezentację na poziomie bramek logicznych w oparciu o zadaną technologiczną bibliotekę komórek
Pojedyncze wartości zadeklarowanego typu Ustawiane przed rozpoczęciem symulacji bez moŝliwości
 Stałe - constant Pojedyncze wartości zadeklarowanego typu Ustawiane przed rozpoczęciem symulacji bez moŝliwości późniejszych zmian Deklarowane w ciele architektury Widoczne dla całej architektury architecture
Stałe - constant Pojedyncze wartości zadeklarowanego typu Ustawiane przed rozpoczęciem symulacji bez moŝliwości późniejszych zmian Deklarowane w ciele architektury Widoczne dla całej architektury architecture
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Literatura. adów w cyfrowych. Projektowanie układ. Technika cyfrowa. Technika cyfrowa. Bramki logiczne i przerzutniki.
 Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Literatura 1. D. Gajski, Principles of Digital Design, Prentice- Hall, 1997 2. C. Zieliński, Podstawy projektowania układów cyfrowych, PWN, Warszawa 2003 3. G. de Micheli, Synteza i optymalizacja układów
Podstawy elektroniki cz. 2 Wykład 2
 Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Modelowanie złożonych układów cyfrowych (1)
") Modelowanie złożonych układów cyfrowych () funkcje i procedury przykłady (przerzutniki, rejestry) style programowania kombinacyjne bloki funkcjonalne bufory trójstanowe multipleksery kodery priorytetowe
Modelowanie złożonych układów cyfrowych () funkcje i procedury przykłady (przerzutniki, rejestry) style programowania kombinacyjne bloki funkcjonalne bufory trójstanowe multipleksery kodery priorytetowe
Verilog HDL. Język Opisu Sprzętu Hardware Description Language Część I. Elementy języka. dr inż. Paweł Tomaszewicz H D L
 Verilog Język Opisu Sprzętu ardware escription anguage Część I. Elementy języka dr inż. Paweł Tomaszewicz 1 istoria krótko ata '80 potrzeba stworzenia jednego języka do symulacji na różnych poziomach opisu
Verilog Język Opisu Sprzętu ardware escription anguage Część I. Elementy języka dr inż. Paweł Tomaszewicz 1 istoria krótko ata '80 potrzeba stworzenia jednego języka do symulacji na różnych poziomach opisu
Programowalne układy logiczne kod kursu: ETD Układy kombinacyjne, przypisania, blokujące i nieblokujące cz.2 W
 Programowalne układy logiczne kod kursu: ETD008270 Układy kombinacyjne, przypisania, blokujące i nieblokujące cz.2 W4 23.03.2018 mgr inż. Maciej Rudek UKŁADY KOMBINACYJNE Układy kombinacyjne Układ kombinacyjny
Programowalne układy logiczne kod kursu: ETD008270 Układy kombinacyjne, przypisania, blokujące i nieblokujące cz.2 W4 23.03.2018 mgr inż. Maciej Rudek UKŁADY KOMBINACYJNE Układy kombinacyjne Układ kombinacyjny
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Wykład 2. Języki Opisu Sprzętu. Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D , tel. w ,
 Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Dwa oblicza systemu cyfrowego Opcje projektowe dla systemu cyfrowego Wykład
Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Dwa oblicza systemu cyfrowego Opcje projektowe dla systemu cyfrowego Wykład
Wykład 4. Języki Opisu Sprzętu. Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D , tel. w ,
 Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Przypisania nieblokujące Stosowanie opóźnień w przypisaniach Wykład 4 2018
Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Przypisania nieblokujące Stosowanie opóźnień w przypisaniach Wykład 4 2018
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Język VERILOG w praktyce
 Język VERLOG w praktyce RUS RUS Język VERLOG rzykłady syntezy blokowej RUS RUS Elementy systemu cyfrowego magistrala danych cd. module swap (Data, Resetn, w, Clock, Extern, RinExt, Busires); input [7:0]
Język VERLOG w praktyce RUS RUS Język VERLOG rzykłady syntezy blokowej RUS RUS Elementy systemu cyfrowego magistrala danych cd. module swap (Data, Resetn, w, Clock, Extern, RinExt, Busires); input [7:0]
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
PoniŜej zamieszczone są rysunki przedstawiane na wykładach z przedmiotu Peryferia Komputerowe. ELEKTRONICZNE UKŁADY CYFROWE
 PoniŜej zamieszczone są rysunki przedstawiane na wykładach z przedmiotu Peryferia Komputerowe. ELEKTRONICZNE UKŁADY CYFROWE Podstawowymi bramkami logicznymi są układy stanowiące: - funktor typu AND (funkcja
PoniŜej zamieszczone są rysunki przedstawiane na wykładach z przedmiotu Peryferia Komputerowe. ELEKTRONICZNE UKŁADY CYFROWE Podstawowymi bramkami logicznymi są układy stanowiące: - funktor typu AND (funkcja
Podstawy układów mikroelektronicznych
 Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
Wykład 4. Języki Opisu Sprzętu
 Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Wprowadzenie do Veriloga Przypisania proceduralne (c. d.) Wykład 4 2017 8 listopad
Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Wprowadzenie do Veriloga Przypisania proceduralne (c. d.) Wykład 4 2017 8 listopad
bocznej Tabela stanów sterownika Światła na drodze:
 Sterownik świateł na skrzyżowaniu APSC Specyfikacja: Sygnały świetne dla drogi głównej mają wyższy priorytet tzn. światła dla drogi głównej są domyślnie zielone Od czasu do czasu pojazdy z drogi bocznej
Sterownik świateł na skrzyżowaniu APSC Specyfikacja: Sygnały świetne dla drogi głównej mają wyższy priorytet tzn. światła dla drogi głównej są domyślnie zielone Od czasu do czasu pojazdy z drogi bocznej
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...
 Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
Podstawy działania układów cyfrowych...2 Systemy liczbowe...2 Kodowanie informacji...3 Informacja cyfrowa...4 Bramki logiczne...4 Podział układów logicznych...6 Cyfrowe układy funkcjonalne...8 Rejestry...8
LEKCJA. TEMAT: Funktory logiczne.
 TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
Układy reprogramowalne i SoC Język VHDL (część 4)
") Język VHDL (część 4) Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Język VHDL (część 4) Prezentacja jest współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie pt. Innowacyjna dydaktyka bez ograniczeń - zintegrowany rozwój Politechniki
Wykład 3. Języki Opisu Sprzętu. Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D , tel. w ,
 Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Tablice i wektory Reguły łączenia portów Wykład 3 2018 10 październik 2018
Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Tablice i wektory Reguły łączenia portów Wykład 3 2018 10 październik 2018
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Bloki anonimowe w PL/SQL
 Język PL/SQL PL/SQL to specjalny język proceduralny stosowany w bazach danych Oracle. Język ten stanowi rozszerzenie SQL o szereg instrukcji, znanych w proceduralnych językach programowania. Umożliwia
Język PL/SQL PL/SQL to specjalny język proceduralny stosowany w bazach danych Oracle. Język ten stanowi rozszerzenie SQL o szereg instrukcji, znanych w proceduralnych językach programowania. Umożliwia
Projekt prostego procesora
 Projekt prostego procesora Opracowany przez Rafała Walkowiaka dla zajęć z PTC 2012/2013 w oparciu o Laboratory Exercise 9 Altera Corporation Rysunek 1 przedstawia schemat układu cyfrowego stanowiącego
Projekt prostego procesora Opracowany przez Rafała Walkowiaka dla zajęć z PTC 2012/2013 w oparciu o Laboratory Exercise 9 Altera Corporation Rysunek 1 przedstawia schemat układu cyfrowego stanowiącego
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Kurs Verilog cz.1 wstęp
 Kurs Verilog cz.1 wstęp Złożoność układów cyfrowych zgodnie z prawem Moore a, podwaja się co około 18 miesięcy. Liczba tranzystorów znajdujących się w układzie scalonym sięga już dziesiątek, a nawet setek
Kurs Verilog cz.1 wstęp Złożoność układów cyfrowych zgodnie z prawem Moore a, podwaja się co około 18 miesięcy. Liczba tranzystorów znajdujących się w układzie scalonym sięga już dziesiątek, a nawet setek
Języki skryptowe w programie Plans
 Języki skryptowe w programie Plans Warsztaty uŝytkowników programu PLANS Kościelisko 2010 Zalety skryptów Automatyzacja powtarzających się czynności Rozszerzenie moŝliwości programu Budowa własnych algorytmów
Języki skryptowe w programie Plans Warsztaty uŝytkowników programu PLANS Kościelisko 2010 Zalety skryptów Automatyzacja powtarzających się czynności Rozszerzenie moŝliwości programu Budowa własnych algorytmów
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Inwerter logiczny. Ilustracja 1: Układ do symulacji inwertera (Inverter.sch)
") DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Szkolenia specjalistyczne
 Szkolenia specjalistyczne AGENDA Język VHDL w implementacji układów cyfrowych w FPGA/CPLD poziom podstawowy GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com Szczecin 2014
Szkolenia specjalistyczne AGENDA Język VHDL w implementacji układów cyfrowych w FPGA/CPLD poziom podstawowy GRYFTEC Embedded Systems ul. Niedziałkowskiego 24 71-410 Szczecin info@gryftec.com Szczecin 2014
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Struktura i działanie jednostki centralnej
 Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Struktura i działanie jednostki centralnej ALU Jednostka sterująca Rejestry Zadania procesora: Pobieranie rozkazów; Interpretowanie rozkazów; Pobieranie danych Przetwarzanie danych Zapisywanie danych magistrala
Poradnik programowania procesorów AVR na przykładzie ATMEGA8
 Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Poradnik programowania procesorów AVR na przykładzie ATMEGA8 Wersja 1.0 Tomasz Pachołek 2017-13-03 Opracowanie zawiera opis podstawowych procedur, funkcji, operatorów w języku C dla mikrokontrolerów AVR
Układy cyfrowe w technologii CMOS
 Projektowanie układów VLSI Układy cyfrowe w technologii MOS ramki bramki podstawowe bramki złożone rysowanie topografii bramka transmisyjna Przerzutniki z bramkami transmisyjnymi z bramkami zwykłymi dr
Projektowanie układów VLSI Układy cyfrowe w technologii MOS ramki bramki podstawowe bramki złożone rysowanie topografii bramka transmisyjna Przerzutniki z bramkami transmisyjnymi z bramkami zwykłymi dr
METODY I JĘZYKI PROGRAMOWANIA PROGRAMOWANIE STRUKTURALNE. Wykład 02
 METODY I JĘZYKI PROGRAMOWANIA PROGRAMOWANIE STRUKTURALNE Wykład 02 NAJPROSTSZY PROGRAM /* (Prawie) najprostszy przykład programu w C */ /*==================*/ /* Między tymi znaczkami można pisać, co się
METODY I JĘZYKI PROGRAMOWANIA PROGRAMOWANIE STRUKTURALNE Wykład 02 NAJPROSTSZY PROGRAM /* (Prawie) najprostszy przykład programu w C */ /*==================*/ /* Między tymi znaczkami można pisać, co się
Logiczne układy bistabilne przerzutniki.
 Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Zadania do wykładu 1, Zapisz liczby binarne w kodzie dziesiętnym: ( ) 2 =( ) 10, ( ) 2 =( ) 10, (101001, 10110) 2 =( ) 10
 2 =( ) 10, ( ) 2 =( ) 10, (101001, 10110) 2 =( ) 10") Zadania do wykładu 1,. 1. Zapisz liczby binarne w kodzie dziesiętnym: (1011011) =( ) 10, (11001100) =( ) 10, (101001, 10110) =( ) 10. Zapisz liczby dziesiętne w naturalnym kodzie binarnym: (5) 10 =( ),
Zadania do wykładu 1,. 1. Zapisz liczby binarne w kodzie dziesiętnym: (1011011) =( ) 10, (11001100) =( ) 10, (101001, 10110) =( ) 10. Zapisz liczby dziesiętne w naturalnym kodzie binarnym: (5) 10 =( ),
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki. ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL
 Przerzutniki, zatrzaski i rejestry w VHDL") Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL Instrukcja pomocnicza do laboratorium z przedmiotu Synteza układów
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 4 (3h) Przerzutniki, zatrzaski i rejestry w VHDL Instrukcja pomocnicza do laboratorium z przedmiotu Synteza układów
Podstawy Informatyki Elementarne podzespoły komputera
 Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Podstawy Informatyki alina.momot@polsl.pl http://zti.polsl.pl/amomot/pi Plan wykładu 1 Reprezentacja informacji Podstawowe bramki logiczne 2 Przerzutniki Przerzutnik SR Rejestry Liczniki 3 Magistrala Sygnały
Wykład 5. Języki Opisu Sprzętu. Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D , tel. w ,
 Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Proceduralne przypisanie ciągłe Wykład 5 2019 16 październik 2019 Operatory
Języki Opisu Sprzętu Prowadzący: dr inż. Andrzej Skoczeń Współrzędne: D-10 222, tel. w. 28-72, e-mail: skoczen@fis.agh.edu.pl Proceduralne przypisanie ciągłe Wykład 5 2019 16 październik 2019 Operatory
VHDL. Behawioralny Strukturalny Czasowy. Poziom RTL
 Style opisu VHDL VHDL Behawioralny Strukturalny Czasowy Równania boolowskie Poziom RTL Przebieg czasowy c = a v b c
Style opisu VHDL VHDL Behawioralny Strukturalny Czasowy Równania boolowskie Poziom RTL Przebieg czasowy c = a v b c
Aby w pełni przetestować układ o trzech wejściach IN_0, IN_1 i IN_2 chcemy wygenerować wszystkie możliwe kombinacje sygnałów wejściowych.
 Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
Generowanie sygnałów testowych VHDL Wariant współbieżny (bez procesu): sygnał
1. ISE WebPack i VHDL Xilinx ISE Design Suite 10.1 VHDL Tworzenie projektu Project Navigator Xilinx ISE Design Suite 10.1 File
 1. ISE WebPack i VHDL Celem ćwiczenia jest szybkie zaznajomienie się ze środowiskiem projektowym Xilinx ISE Design Suite 10.1 oraz językiem opisu sprzętu VHDL. Tworzenie projektu Uruchom program Project
1. ISE WebPack i VHDL Celem ćwiczenia jest szybkie zaznajomienie się ze środowiskiem projektowym Xilinx ISE Design Suite 10.1 oraz językiem opisu sprzętu VHDL. Tworzenie projektu Uruchom program Project
Ćw. 9 Przerzutniki. 1. Cel ćwiczenia. 2. Wymagane informacje. 3. Wprowadzenie teoretyczne PODSTAWY ELEKTRONIKI MSIB
 Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Ćw. 9 Przerzutniki 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi elementami sekwencyjnymi, czyli przerzutnikami. Zostanie przedstawiona zasada działania przerzutników oraz sposoby
Języki projektowania HDL
 Języki projektowania HDL Wykład dr inż. Marek Wójcikowski Ver: 2015-03-11 1 Zasady zaliczenia Wykład 2 kolokwia: 22.5+22.5 punktów=45 punktów Obecność na wykładzie 5 punktów Laboratorium 50 punktów Warunek
Języki projektowania HDL Wykład dr inż. Marek Wójcikowski Ver: 2015-03-11 1 Zasady zaliczenia Wykład 2 kolokwia: 22.5+22.5 punktów=45 punktów Obecność na wykładzie 5 punktów Laboratorium 50 punktów Warunek
Układy cyfrowe w Verilog HDL. Elementy języka z przykładami. wersja: cz.3
 Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
Układy cyfrowe w Verilog Elementy języka z przykładami wersja: 10.2009 cz.3 1 Układy sekwencyjne Układy sekwencyjne mają pamięć Układy synchroniczne najczęściej spotykane wszystkie elementy są kontrolowane
Statyczne badanie przerzutników - ćwiczenie 3
 Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Statyczne badanie przerzutników - ćwiczenie 3. Cel ćwiczenia Zapoznanie się z podstawowymi strukturami przerzutników w wersji TTL realizowanymi przy wykorzystaniu bramek logicznych NAND oraz NO. 2. Wykaz
Laboratorium przedmiotu Technika Cyfrowa
 Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Laboratorium przedmiotu Technika Cyfrowa ćw.3 i 4: Asynchroniczne i synchroniczne automaty sekwencyjne 1. Implementacja asynchronicznych i synchronicznych maszyn stanu w języku VERILOG: Maszyny stanu w
Programowalne układy logiczne
 Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Programowalne układy logiczne Układy synchroniczne Szymon Acedański Marcin Peczarski Instytut Informatyki Uniwersytetu Warszawskiego 26 października 2015 Co to jest układ sekwencyjny? W układzie sekwencyjnym,
Automatyka. Treść wykładów: Multiplekser. Układ kombinacyjny. Demultiplekser. Koder
 Treść wykładów: utomatyka dr inż. Szymon Surma szymon.surma@polsl.pl http://zawt.polsl.pl/studia pok., tel. +48 6 46. Podstawy automatyki. Układy kombinacyjne,. Charakterystyka,. Multiplekser, demultiplekser,.
Treść wykładów: utomatyka dr inż. Szymon Surma szymon.surma@polsl.pl http://zawt.polsl.pl/studia pok., tel. +48 6 46. Podstawy automatyki. Układy kombinacyjne,. Charakterystyka,. Multiplekser, demultiplekser,.
Uwagi dotyczące notacji kodu! Moduły. Struktura modułu. Procedury. Opcje modułu (niektóre)
") Uwagi dotyczące notacji kodu! Wyrazy drukiem prostym -- słowami języka VBA. Wyrazy drukiem pochyłym -- inne fragmenty kodu. Wyrazy w [nawiasach kwadratowych] opcjonalne fragmenty kodu (mogą być, ale nie
Uwagi dotyczące notacji kodu! Wyrazy drukiem prostym -- słowami języka VBA. Wyrazy drukiem pochyłym -- inne fragmenty kodu. Wyrazy w [nawiasach kwadratowych] opcjonalne fragmenty kodu (mogą być, ale nie
/* dołączenie pliku nagłówkowego zawierającego deklaracje symboli dla wykorzystywanego mikrokontrolera */ #include <aduc834.h>
 Szablon programu: /* dołączenie pliku nagłówkowego zawierającego deklaracje symboli dla wykorzystywanego mikrokontrolera */ #include /* opcjonalne: deklaracja typów o rozmiarze jednego i dwóch
Szablon programu: /* dołączenie pliku nagłówkowego zawierającego deklaracje symboli dla wykorzystywanego mikrokontrolera */ #include /* opcjonalne: deklaracja typów o rozmiarze jednego i dwóch
Sposoby projektowania systemów w cyfrowych
 Sposoby projektowania systemów w cyfrowych Top-down Idea całości projektu Dekompozycja na mniejsze bloki Projekt i rafinacja podbloków Łączenie bloków w całość PRZYKŁAD (sumator kaskadowy) zdefiniowanie
Sposoby projektowania systemów w cyfrowych Top-down Idea całości projektu Dekompozycja na mniejsze bloki Projekt i rafinacja podbloków Łączenie bloków w całość PRZYKŁAD (sumator kaskadowy) zdefiniowanie
Opis: Instrukcja warunkowa Składnia: IF [NOT] warunek [AND [NOT] warunek] [OR [NOT] warunek].
![Opis: Instrukcja warunkowa Składnia: IF [NOT] warunek [AND [NOT] warunek] [OR [NOT] warunek].](/thumbs/63/49656406.jpg "Opis: Instrukcja warunkowa Składnia: IF [NOT] warunek [AND [NOT] warunek] [OR [NOT] warunek].") ABAP/4 Instrukcja IF Opis: Instrukcja warunkowa Składnia: IF [NOT] warunek [AND [NOT] warunek] [OR [NOT] warunek]. [ELSEIF warunek. ] [ELSE. ] ENDIF. gdzie: warunek dowolne wyrażenie logiczne o wartości
ABAP/4 Instrukcja IF Opis: Instrukcja warunkowa Składnia: IF [NOT] warunek [AND [NOT] warunek] [OR [NOT] warunek]. [ELSEIF warunek. ] [ELSE. ] ENDIF. gdzie: warunek dowolne wyrażenie logiczne o wartości
Różnicowe układy cyfrowe CMOS
 1 Różnicowe układy cyfrowe CMOS Różnicowe układy cyfrowe CMOS 2 CVSL (Cascode Voltage Switch Logic) Różne nazwy: CVSL - Cascode Voltage Switch Logic DVSL - Differential Cascode Voltage Switch Logic 1 Cascode
1 Różnicowe układy cyfrowe CMOS Różnicowe układy cyfrowe CMOS 2 CVSL (Cascode Voltage Switch Logic) Różne nazwy: CVSL - Cascode Voltage Switch Logic DVSL - Differential Cascode Voltage Switch Logic 1 Cascode
Podstawy programowania w języku C
 Podstawy programowania w języku C WYKŁAD 1 Proces tworzenia i uruchamiania programów Algorytm, program Algorytm przepis postępowania prowadzący do rozwiązania określonego zadania. Program zapis algorytmu
Podstawy programowania w języku C WYKŁAD 1 Proces tworzenia i uruchamiania programów Algorytm, program Algorytm przepis postępowania prowadzący do rozwiązania określonego zadania. Program zapis algorytmu
Technika Mikroprocesorowa
 Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Technika Mikroprocesorowa Dariusz Makowski Katedra Mikroelektroniki i Technik Informatycznych tel. 631 2648 dmakow@dmcs.pl http://neo.dmcs.p.lodz.pl/tm 1 System mikroprocesorowy? (1) Magistrala adresowa
Bramki logiczne Podstawowe składniki wszystkich układów logicznych
 Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5.
 Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje
Mikrokontroler ATmega32. Język symboliczny
 Mikrokontroler ATmega32 Język symboliczny 1 Język symboliczny (asembler) jest językiem niskiego poziomu - pozwala pisać programy złożone z instrukcji procesora. Kody instrukcji są reprezentowane nazwami
Mikrokontroler ATmega32 Język symboliczny 1 Język symboliczny (asembler) jest językiem niskiego poziomu - pozwala pisać programy złożone z instrukcji procesora. Kody instrukcji są reprezentowane nazwami
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach
 Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Marcin Stępniak Architektura systemów komputerowych Laboratorium 13 Symulator SMS32 Operacje na bitach 1. Informacje Matematyk o nazwisku Bool wymyślił gałąź matematyki do przetwarzania wartości prawda
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Układy logiczne układy cyfrowe
 Układy logiczne układy cyfrowe Jak projektować układy cyfrowe (systemy cyfrowe) Układy arytmetyki rozproszonej filtrów cyfrowych Układy kryptograficzne X Selektor ROM ROM AND Specjalizowane układy cyfrowe
Układy logiczne układy cyfrowe Jak projektować układy cyfrowe (systemy cyfrowe) Układy arytmetyki rozproszonej filtrów cyfrowych Układy kryptograficzne X Selektor ROM ROM AND Specjalizowane układy cyfrowe
Podstawy techniki cyfrowej cz.2 zima Rafał Walkowiak
 Podstawy techniki cyfrowej cz.2 zima 2015 Rafał Walkowiak 3.12.2015 Układy cyfrowe Ogólna struktura logiczna: Wej ster Dane układ sterowania bloki funkcjonalne dla realizacji określonych funkcji przetwarzania
Podstawy techniki cyfrowej cz.2 zima 2015 Rafał Walkowiak 3.12.2015 Układy cyfrowe Ogólna struktura logiczna: Wej ster Dane układ sterowania bloki funkcjonalne dla realizacji określonych funkcji przetwarzania
Plan wykładu. Architektura systemów komputerowych. Cezary Bolek
 Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Elementy cyfrowe i układy logiczne
 Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Projektowanie Urządzeń Cyfrowych
 Projektowanie Urządzeń Cyfrowych Laboratorium 2 Przykład prostego ALU Opracował: mgr inż. Leszek Ciopiński Wstęp: Magistrale: Program MAX+plus II umożliwia tworzenie magistral. Magistrale są to grupy przewodów
Projektowanie Urządzeń Cyfrowych Laboratorium 2 Przykład prostego ALU Opracował: mgr inż. Leszek Ciopiński Wstęp: Magistrale: Program MAX+plus II umożliwia tworzenie magistral. Magistrale są to grupy przewodów
Ćwiczenie 01 - Strona nr 1 ĆWICZENIE 01
 ĆWICZENIE 01 Ćwiczenie 01 - Strona nr 1 Polecenie: Bez użycia narzędzi elektronicznych oraz informatycznych, wykonaj konwersje liczb z jednego systemu liczbowego (BIN, OCT, DEC, HEX) do drugiego systemu
ĆWICZENIE 01 Ćwiczenie 01 - Strona nr 1 Polecenie: Bez użycia narzędzi elektronicznych oraz informatycznych, wykonaj konwersje liczb z jednego systemu liczbowego (BIN, OCT, DEC, HEX) do drugiego systemu
Układy kombinacyjne 1
 Układy kombinacyjne 1 Układy kombinacyjne są to układy cyfrowe, których stany wyjść są zawsze jednoznacznie określone przez stany wejść. Oznacza to, że doprowadzając na wejścia tych układów określoną kombinację
Układy kombinacyjne 1 Układy kombinacyjne są to układy cyfrowe, których stany wyjść są zawsze jednoznacznie określone przez stany wejść. Oznacza to, że doprowadzając na wejścia tych układów określoną kombinację
Krótkie wprowadzenie do ModelSim i Quartus2
 Krótkie wprowadzenie do ModelSim i Quartus2 wersja 04.2011 1 Plan Oprogramowanie Pliki źródłowe Scenariusze użycia 2 Programy Programy w wersji darmowej do pobrania ze strony www.altera.com ModelSim-Altera
Krótkie wprowadzenie do ModelSim i Quartus2 wersja 04.2011 1 Plan Oprogramowanie Pliki źródłowe Scenariusze użycia 2 Programy Programy w wersji darmowej do pobrania ze strony www.altera.com ModelSim-Altera
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Programowany układ czasowy APSC
 Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Programowany układ czasowy APSC Ośmiobitowy układ czasowy pracujący w trzech trybach. Wybór trybu realizowany jest przez wartość ładowaną do wewnętrznego rejestru zwanego słowem sterującym. Rejestr ten
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5
 Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Temat: Pamięci. Programowalne struktury logiczne.
 Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Temat: Pamięci. Programowalne struktury logiczne. 1. Pamięci są układami służącymi do przechowywania informacji w postaci ciągu słów bitowych. Wykonuje się jako układy o bardzo dużym stopniu scalenia w
Podstawy techniki cyfrowej cz.2 wykład 3 i 5
 Podstawy techniki cyfrowej cz.2 wykład 3 i 5 Rafał Walkowiak Wersja 0.1 29.10.2013 Układy cyfrowe Ogólna struktura logiczna: Wej ster Dane bloki funkcjonalne dla realizacji określonych funkcji przetwarzania
Podstawy techniki cyfrowej cz.2 wykład 3 i 5 Rafał Walkowiak Wersja 0.1 29.10.2013 Układy cyfrowe Ogólna struktura logiczna: Wej ster Dane bloki funkcjonalne dla realizacji określonych funkcji przetwarzania
Skrypty i funkcje Zapisywane są w m-plikach Wywoływane są przez nazwę m-pliku, w którym są zapisane (bez rozszerzenia) M-pliki mogą zawierać
 M-pliki mogą zawierać") MatLab część III 1 Skrypty i funkcje Zapisywane są w m-plikach Wywoływane są przez nazwę m-pliku, w którym są zapisane (bez rozszerzenia) M-pliki mogą zawierać komentarze poprzedzone znakiem % Skrypty
MatLab część III 1 Skrypty i funkcje Zapisywane są w m-plikach Wywoływane są przez nazwę m-pliku, w którym są zapisane (bez rozszerzenia) M-pliki mogą zawierać komentarze poprzedzone znakiem % Skrypty
Ćw. 8 Bramki logiczne
 Ćw. 8 Bramki logiczne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi, poznanie ich rodzajów oraz najwaŝniejszych parametrów opisujących ich własności elektryczne.
Ćw. 8 Bramki logiczne 1. Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi, poznanie ich rodzajów oraz najwaŝniejszych parametrów opisujących ich własności elektryczne.
Języki C i C++ Wykład: 2. Wstęp Instrukcje sterujące. dr Artur Bartoszewski - Języki C i C++, sem. 1I- WYKŁAD
 Języki C i C++ Wykład: 2 Wstęp Instrukcje sterujące 1 dr Artur Bartoszewski - Języki C i C++, sem. 1I- WYKŁAD programowania w C++ Instrukcje sterujące 2 Pętla for for ( instrukcja_ini ; wyrazenie_warunkowe
Języki C i C++ Wykład: 2 Wstęp Instrukcje sterujące 1 dr Artur Bartoszewski - Języki C i C++, sem. 1I- WYKŁAD programowania w C++ Instrukcje sterujące 2 Pętla for for ( instrukcja_ini ; wyrazenie_warunkowe