Sterowniki Programowalne (SP)
|
|
|
- Mieczysław Rogowski
- 9 lat temu
- Przeglądów:
Transkrypt
1 Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V SP 2014 dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 1

2 Typowa procedura tworzenia oprogramowania dla sterownika PLC SP

3 . SP 2014 Źródło: Seta K. Wprowadzenie 3
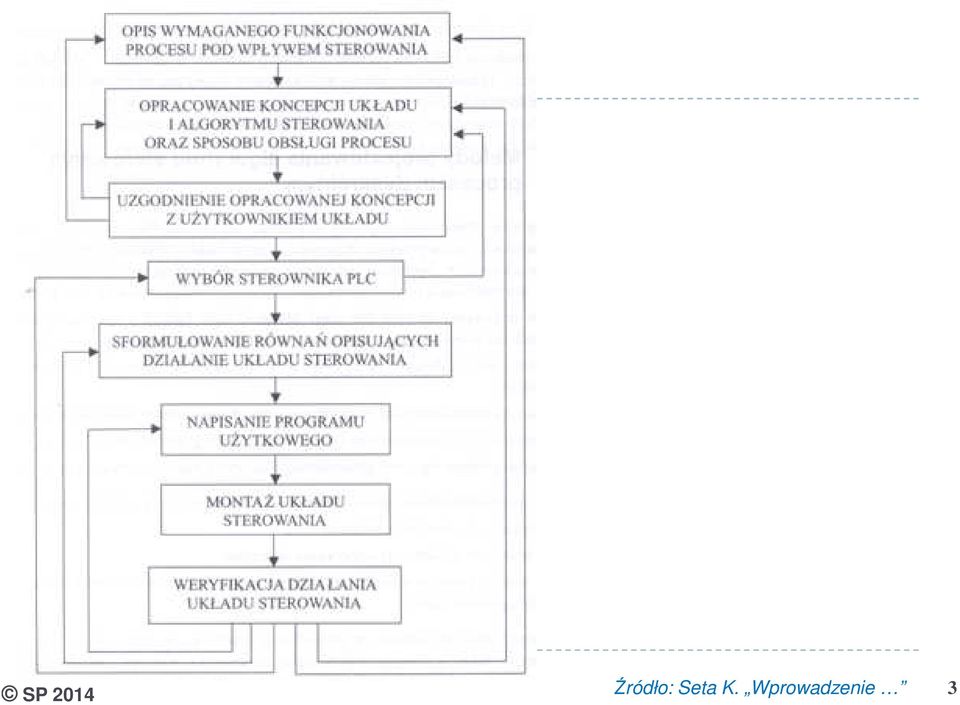
4 . Zapoznanie się z procesem: informacje od technologa, z literatury, z innych źródeł Opracowanie koncepcji układu i algorytmu sterowania: czy sterowanie tylko binarne? czy proces ma charakter sekwencyjny? określenie struktury programu: liniowy strukturalny (określenie poszczególnych zadań, bloków programowych związanych z określonymi fragmentami procesu) wykorzystanie opisu w postaci np.: tablicy stanów, grafu stanów, schematu blokowego, sekwencyjnego schematu funkcjonalnego Oszacowanie wielkości obiektu (liczba wejść i wyjść) SP
 wykorzystanie opisu w postaci np.")
5 . Uzgodnienia końcowe koncepcji układu i algorytmu sterowania z użytkownikiem systemu SP

6 . Typ sterownika Typy i liczby modułów Rodzaj urządzeń peryferyjnych Konfiguracja sterownika i jej opis Tablice urządzeń fizycznych (adres logiczny, fizyczny, symboliczny; oznaczenie na schemacie; opis punktu; producent): czujników przycisków przetworników pomiarowych elementów wykonawczych. SP
: czujników przycisków przetworników pomiarowych elementów")
7 . Sformułowanie równań (logiki) opisujących działanie układu sterowania Wykorzystanie opisu w postaci np.: tablicy stanów grafu stanów schematu blokowego ( klasycznego ) sekwencyjnego schematu funkcjonalnego SP
 sekwencyjnego schematu funkcjonalnego SP")
8 . Napisanie programu z wykorzystaniem języka : drabinkowego tekst strukturalny lista rozkazów funkcjonalny schemat blokowy C Napisanie programu z wykorzystaniem różnych języków : program hybrydowy Wprowadzenie komentarzy Tworzenie dokumentacji, np. wykorzystanych w programie znaczników (flag) SP

9 . Zgodnie z normami Zgodnie z zasadami sztuki Zgodnie z dokumentacją techniczną iście techniczna robota. SP

10 . Sprawdzenie działania wszystkich torów wejściowych i wyjściowych Wykorzystanie symulatora obiektu dla celów weryfikacji algorytmu sterowania lub jego poszczególnych sekcji Wykonanie kopi programu na zewnętrznym nośniku Wykonanie przejrzystej dokumentacji technicznej programu SP

11 Przypomnienie wybranych elementów normy IEC SP

12 IEC model oprogramowania Norma IEC wyróżnia następujące elementy języków programowania dla sterowników PLC: typy danych (ang. Data types) jednostki organizacyjne oprogramowania (ang. Program Organization Units - POU) elementy konfiguracji (ang. Configuration elements) elementy sekwencyjnego schematu funkcjonalnego (ang. Sequential Function Chart - SFC) SP
 elementy konfiguracji (ang.")
13 IEC model oprogramowania - POU Jednostki organizacyjne oprogramowania POU (ang. Program Organization Units) stanowią najmniejsze niezależne jednostki oprogramowania aplikacji użytkownika, a składają się na nie: funkcje (ang. functions) bloki funkcyjne (ang. function blocks) programy (ang. programs) Każdy POU zawiera następujące elementy: typ i nazwa POU (w przypadku funkcji także typ danej wyjściowej) deklaracja zmiennych (wejściowych, wyjściowych i lokalnych) ciało POU (kod programu) SP
 Każdy POU zawiera następujące elementy: typ i nazwa POU (w przypadku funkcji także typ danej wyjściowej) deklaracja")
14 SP

15 Język FBD - wprowadzenie Język FBD jest jednym z języków graficznych zdefiniowanych w normie IEC Język FBD (ang. Function Block), jest odpowiednikiem schematu przepływu sygnału (ang. signal flow) dla obwodów logicznych przedstawionych w formie połączonych bramek logicznych oraz funkcji i bloków funkcjonalnych, takich jak w języku drabinkowym SP
 dla obwodów logicznych przedstawionych w formie połączonych bramek logicznych")
16 Język FBD - wprowadzenie Przepływ sygnału pomiędzy poszczególnymi blokami funkcyjnymi następuje z wyjścia (prawa strona bloku) do wejścia kolejnego bloku funkcyjnego (lewa strona bloku) Elementy graficzne występujące w języku FBD mają kształt prostokątów połączonych: w sposób jawny linie poziome i pionowe (ang. wire) w sposób niejawny poprzez zdefiniowane zmienne Zbiór wzajemnie połączonych bloków nazywa się schematem blokowym, siecią lub obwodem SP
 w sposób niejawny poprzez zdefiniowane zmienne Zbiór wzajemnie połączonych bloków nazywa się schematem")
17 Język FBD - wprowadzenie Program napisany za pomocą języka FBD może składać się z pojedynczego schematu blokowego (pojedynczej sieci) lub grupy schematów blokowych (grupy sieci) wykonywanych zgodnie z określoną sekwencją W schemacie blokowym (sieci) mogą występować sprzężenia zwrotne, gdy wyjście funkcji lub bloku funkcyjnego jest wprowadzane na wejście funkcji lub bloku funkcyjnego poprzedzającego je w schemacie blokowym (sieci) SP

18 Język FBD - wprowadzenie EN JAKASTAM _FUNKCJA WE1 WY WE2 ENO EN (ang. Enable) ENO (ang. Enable Output) SP
 ENO (ang.")
19 Język FBD - wprowadzenie pętla jawna AND zm2 wy2 AND zm1 wy1 SP 2014 Źródło: PN-EN

20 Język FBD - wprowadzenie pętla niejawna AND zm2 wy2 AND zm1 wy1 wy2 SP 2014 Źródło: PN-EN

21 Język FBD - wprowadzenie pętla niejawna AND AND zm1 wy1 wy2 zm2 wy2 wy1 SP 2014 Źródło: PN-EN
22 Język FBD zasady wykonania programu Wartość żadnego z elementów obwodu nie jest wyznaczona dopóki nie zostaną wyznaczone wartości wszystkich jego wejść Wyznaczanie wartości elementu obwodu nie jest zakończone, dopóki nie wyznaczono wartości dla wszystkich jego wyjść Wykonanie całego programu (całego obwodu) nie jest zakończone, dopóki nie wyznaczono wartości wyjść dla wszystkich elementów tego obwodu W ramach POU wykonywanie programu dla obwodu powinno być zakończone, zanim rozpocznie się wykonywanie następnego obwodu, w którym są wykorzystywane wyjścia obwodu poprzedniego SP 2014 Źródło: PN-EN
23 Język FBD zasady wykonania programu Kolejność wykonywania poszczególnych bloków programu w postaci schematu blokowego (pojedynczej sieci) związana jest bezpośrednio z: położeniem bloku w ramach całego obwodu oraz ze strukturą jawnych, wzajemnych połączeń pomiędzy poszczególnymi blokami Skanowanie programu w postaci schematu blokowego (pojedynczej sieci) odbywa się z góry na duł i z lewej strony obwodu do prawej strony obwodu SP
24 Podstawy FBD w sterownikach PLC GE FANUC SP
25 Język FBD zasady wykonania programu przykład 1 SP 2014 Źródło: Logic Developer - PLC: 25
26 Język FBD zasady wykonania programu przykład 2 SP 2014 Źródło: Logic Developer - PLC: 26
27 Język FBD zasady wykonania programu przykład 3 SP 2014 Źródło: Logic Developer - PLC: 27
28 Język FBD zasady wykonania programu przykład 4 SP 2014 Źródło: Logic Developer - PLC: 28
29 Język FBD zasady wykonania programu przykład 5 SP 2014 Źródło: Logic Developer - PLC: 29
30 Język FBD zasady wykonania programu przykład 6 SP 2014 Źródło: Logic Developer - PLC: 30
31 Język FBD zasady wykonania programu przykład 7 SP 2014 Źródło: Logic Developer - PLC: 31
32 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> operacje na bitach min 2 we., max 8 we SP 2014 Źródło: Logic Developer - PLC: 32
33 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> operacje matematyczne SP 2014 Źródło: Logic Developer - PLC: 33

34 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> zaawansowane funkcje matematyczne SP 2014 Źródło: Logic Developer - PLC: 34
35 Przykłady funkcji podstawowych -> relacje Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 35
36 Przykłady funkcji podstawowych -> liczniki Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 36
37 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 37
38 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 38
39 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 39
40 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC GE Fanuc SP 2014 Źródło: Logic Developer - PLC: 40
41 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> funkcje sterujące SP 2014 Źródło: Logic Developer - PLC: 41
42 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> kopiowanie danych SP 2014 Źródło: Logic Developer - PLC: 42
43 Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykłady funkcji podstawowych -> konwersji pomiędzy typami danych SP 2014 Źródło: Logic Developer - PLC: 43
44 Język FBD podstawowe elementy sterowników PLC GE Fanuc Mały przykład wykorzystanie generatora impulsów TP SP 2014 Źródło: Logic Developer - PLC: 44
45 Język FBD podstawowe elementy sterowników PLC GE Fanuc- SP
46 Język FBD podstawowe elementy sterowników PLC GE Fanuc A co z funkcjonalnością SET i RESET znaną już nam z LD i IL? SP 2014 Źródło: Logic Developer - PLC: 46
47 Przykład: Przerzutnik RS Język FBD podstawowe elementy sterowników PLC GE Fanuc Przykładowe elementy języka FBD do wykorzystania: bloki AND bloki NOT r s Q Q stan Stan wejść logicznie zabroniony Przerzutnik ustawiony w stan Przerzutnik ustawiony w stan Pamiętanie stanu Stan pamiętania 1 0 Pamiętanie stanu 1 SP
48 Przykład: Przerzutnik RS Język FBD podstawowe elementy sterowników PLC GE Fanuc SP
49 Język FBD podstawowe elementy sterowników PLC GE Fanuc Mały przykład regulator dwupołożeniowy z histerezą czasową SP 2014 Źródło: Logic Developer - PLC: 49
50 Język FBD podstawowe elementy sterowników PLC GE Fanuc SP
51 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja I SP
52 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja I SP
53 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja I SP
54 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja II SP
55 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja II SP
56 Język FBD podstawowe elementy sterowników PLC GE Fanuc wersja II SP
57 Podstawy FBD w sterownikach PLC SIMATIC S SP
58 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> operacje na bitach Reset OR Set XOR Przerzutnik asynchroniczny RS AND SP

59 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> operacje matematyczne SP
60 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> zaawansowane funkcje matematyczne min 2 we., max 100 we SP
61 Przykłady funkcji podstawowych -> relacje Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
62 Przykłady funkcji podstawowych -> liczniki Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
63 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
64 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
65 Przykłady funkcji podstawowych -> timery Język FBD podstawowe elementy sterowników PLC SIMATIC S SP

66 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> funkcje sterujące SP
67 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> kopiowanie danych SP
68 Język FBD podstawowe elementy sterowników PLC SIMATIC S Przykłady funkcji podstawowych -> konwersji pomiędzy typami danych SP
69 Język FBD podstawowe elementy sterowników PLC SIMATIC S Mały przykład Monitorowanie poziomu cieczy w zbiorniku ze wskazaniem przekroczenia poziomu minimalnego i maksymalnego SP
70 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
71 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
72 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
73 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
74 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
75 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
76 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP


77 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
78 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
79 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
80 Język FBD podstawowe elementy sterowników PLC SIMATIC S SP
81 Źródła: PN-EN Sterowniki programowalne Języki programowania Proficy Logic Developer PLC, Function Block Diagram (FBD) Language, GE Fanuc Intelligent Platforms, Inc Logic Developer - PLC: an Overview, GE Fanuc Intelligent Platforms, Inc SP
82 Dziękuję za uwagę!!! SP
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Język programowania: Lista instrukcji (IL Instruction List)
") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz
Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz
Sterowniki PLC. Elektrotechnika II stopień Ogólno akademicki. przedmiot kierunkowy. Obieralny. Polski. semestr 1
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
E-E-A-1008-s6. Sterowniki PLC. Elektrotechnika I stopień Ogólno akademicki. kierunkowy (podstawowy / kierunkowy / inny HES)
") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski
 Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
E-4EZA1-10-s7. Sterowniki PLC
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Elektrotechnika I stopień Ogólno akademicki. kierunkowy (podstawowy / kierunkowy / inny HES)
") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Sterowniki programowalne Programmable Controllers. Energetyka I stopień Ogólnoakademicki. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy
 PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Katedra Systemów Cyfrowego Przetwarzania Sygnałów
 Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Sterowniki Programowalne (SP) Wykład #4
 Wykład #4") Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Emulator sterowników PLC serii FX
 Seminarium dyplomowe prezentacja tematów prac magisterskich Autorzy : Krzysztof Mokrzycki, Tomasz Pawlak Emulator sterowników PLC serii Promotor : dr in ż. Zygmunt Kubiak 1 Co to są sterowniki PLC? PLC
Seminarium dyplomowe prezentacja tematów prac magisterskich Autorzy : Krzysztof Mokrzycki, Tomasz Pawlak Emulator sterowników PLC serii Promotor : dr in ż. Zygmunt Kubiak 1 Co to są sterowniki PLC? PLC
MIĘDZYNARODOWA NORMA IEC 61131
 Rozdział II MIĘDZYNARODOWA NORMA IEC 61131 2.1. Geneza powstania normy Przez lata rozwoju sterowników programowalnych producenci wprowadzali różne metody programowania sterowników PLC (Programmable Logic
Rozdział II MIĘDZYNARODOWA NORMA IEC 61131 2.1. Geneza powstania normy Przez lata rozwoju sterowników programowalnych producenci wprowadzali różne metody programowania sterowników PLC (Programmable Logic
Kurs STARTER S5. Spis treści. Dzień 1. III Budowa wewnętrzna, działanie i obsługa sterownika (wersja 0504)
") I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
PODSTAWY PROGRAMOWANIA STEROWNIKÓW PLC
 PODSTAWY PROGRAMOWANIA STEROWNIKÓW PLC SPIS TREŚCI WSTĘP JĘZYK SCHEMATÓW DRABINKOWYCH JĘZYK SCHEMATÓW BLOKÓW FUNKCYJNYCH JĘZYK INSTRUKCJI JĘZYK STRUKTURALNY SEKWENCYJNY SCHEMAT FUNKCYJNY PRZYKŁADY PROGRAMÓW
PODSTAWY PROGRAMOWANIA STEROWNIKÓW PLC SPIS TREŚCI WSTĘP JĘZYK SCHEMATÓW DRABINKOWYCH JĘZYK SCHEMATÓW BLOKÓW FUNKCYJNYCH JĘZYK INSTRUKCJI JĘZYK STRUKTURALNY SEKWENCYJNY SCHEMAT FUNKCYJNY PRZYKŁADY PROGRAMÓW
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska
 Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska") Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Sterowniki programowalne
 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Procedura tworzenia oprogramowania sterownika Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Każdy program w sterowniku PLC, bez względu na jego postać, wykonywany jest cyklicznie. - obsługa wejść - polega na odczytaniu aktualnych sta- Cykl programowy nów na wejściach sterownika i wpisaniu ich
Każdy program w sterowniku PLC, bez względu na jego postać, wykonywany jest cyklicznie. - obsługa wejść - polega na odczytaniu aktualnych sta- Cykl programowy nów na wejściach sterownika i wpisaniu ich
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Programowanie sterowników PLC wprowadzenie
 Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Elektrotechnika II Stopień (I stopień / II stopień) Ogólno akademicki (ogólno akademicki / praktyczny)
 Ogólno akademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Istnieje wiele metod przekształcania algorytmów wprogram sterujący.
 Metody programowania sterowników swobodnie programowalnych Wykład 9.3 Metody programowania sterowników swobodnie programowalnych Istnieje wiele metod przekształcania algorytmów wprogram sterujący. W1993
Metody programowania sterowników swobodnie programowalnych Wykład 9.3 Metody programowania sterowników swobodnie programowalnych Istnieje wiele metod przekształcania algorytmów wprogram sterujący. W1993
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
UKŁADY KOMBINACYJNE WPROWADZENIE. przerzutniki, bramki ze sprzężeniami zwrotnymi. Układ przełączający Y t. Q t stan wewnętrzny
 UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Spis treści. I Sterowniki programowalne SIMATIC (wersja 1908) II Łączenie sterownika z programatorem (wersja 1908)
 II Łączenie sterownika z programatorem (wersja 1908)") Spis treści I Sterowniki programowalne SIMATIC (wersja 1908) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
Spis treści I Sterowniki programowalne SIMATIC (wersja 1908) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
Czym jest IEC ?
 Czym jest IEC 61131-3? Zadaniem sterowników programowalnych jest zrealizowanie zapisanego w ich pamięci programu, który stanowi implementację algorytmu sterowania. Jego danymi wejściowymi są informacje
Czym jest IEC 61131-3? Zadaniem sterowników programowalnych jest zrealizowanie zapisanego w ich pamięci programu, który stanowi implementację algorytmu sterowania. Jego danymi wejściowymi są informacje
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano
 Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
W 5_2 Typy języków programowania sterowników PLC (zdefiniowane w IEC-61131) - języki graficzne (LD, FBD); języki tekstowe (ST, IL).
 - języki graficzne (LD, FBD); języki tekstowe (ST, IL).") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
W_4 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów wytwarzania; jest określony przez schemat funkcjonalny oraz opis słowny jego przebiegu. Do napisania programu
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) O normie IEC 61131 a w szczególności o normie IEC 61131-3 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia:
Sterowniki Programowalne (SP) O normie IEC 61131 a w szczególności o normie IEC 61131-3 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia:
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
ALGORYTMY. 1. Podstawowe definicje Schemat blokowy
 ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
Podstawowe procedury przy tworzeniu programu do sterownika:
 Podstawowe procedury przy tworzeniu programu do sterownika: 1. Opracowanie algorytmu sterowania procesem, potwierdzonego przez technologa. 2. Oszacowanie wielkości obiektu, czyli liczby punktów (liczby
Podstawowe procedury przy tworzeniu programu do sterownika: 1. Opracowanie algorytmu sterowania procesem, potwierdzonego przez technologa. 2. Oszacowanie wielkości obiektu, czyli liczby punktów (liczby
" Sterowniki programowalne f.1/1
 PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
Podstawy Automatyki. Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
Wykład 15 - Projektowanie układów asynchronicznych o programach liniowych Instytut Automatyki i Robotyki Warszawa, 2016 Układy o programach liniowych - Przykład Zaprojektować procesowo-zależny układ sterowania
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
JĘZYK SFC Sequential Function Chart ki 2004 Graf sekwencji rbańs rad U on inż. K dr
 JĘZYK SFC Sequential Function Chart Graf sekwencji TRANSITION tranzycja, przejście START INITIAL STEP blok/krok startowy/początkowy/ inicjujący blok aktywny STEP blok, krok blok nieaktywny Zawsze bloki
JĘZYK SFC Sequential Function Chart Graf sekwencji TRANSITION tranzycja, przejście START INITIAL STEP blok/krok startowy/początkowy/ inicjujący blok aktywny STEP blok, krok blok nieaktywny Zawsze bloki
Sterowniki Programowalne (SP) Wykład #7 Język programowania PLC (Instruction List - IL)
 Wykład #7 Język programowania PLC (Instruction List - IL)") Sterowniki Programowalne (SP) Wykład #7 Język programowania PLC (Instruction List - IL) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski październik 2016 Zawartość
Sterowniki Programowalne (SP) Wykład #7 Język programowania PLC (Instruction List - IL) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski październik 2016 Zawartość
Tworzenie prostego programu w językach ST i LD
 Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Podstawy Automatyki. Wykład 13 - Wprowadzenie do układów sekwencyjnych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Wykład 13 - Wprowadzenie do układów sekwencyjnych. Instytut Automatyki i Robotyki Warszawa, 2016 Pojęcia podstawowe Posłużmy się ponownie przykładem układu sterującego pracą siłowników, wymuszającego realizację
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Instrukcja użytkownika
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych Symulator sterownika programowalnego PS4-201-MM1 Instrukcja użytkownika Gdańsk 2006-1 - Spis treści
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych Symulator sterownika programowalnego PS4-201-MM1 Instrukcja użytkownika Gdańsk 2006-1 - Spis treści
Sterowniki Programowalne (SP) Wykład 6
 Wykład 6") Sterowniki Programowalne (SP) Wykład 6 O normie IEC 61131 a w szczególności o normie IEC 61131-3 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka
Sterowniki Programowalne (SP) Wykład 6 O normie IEC 61131 a w szczególności o normie IEC 61131-3 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
Spis treści. Dzień 1. I Sterowniki programowalne SIMATIC (wersja 1805) II Łączenie sterownika z programatorem (wersja 1805)
 II Łączenie sterownika z programatorem (wersja 1805)") Spis treści Dzień 1 I Sterowniki programowalne SIMATIC (wersja 1805) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
Spis treści Dzień 1 I Sterowniki programowalne SIMATIC (wersja 1805) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
Kurs SIMATIC S7-300/400 i TIA Portal - Podstawowy. Spis treści. Dzień 1. I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503)
") Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC
 Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Rok akademicki: 2013/2014 Kod: EEL s Punkty ECTS: 2. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Technika mikroprocesorowa Rok akademicki: 2013/2014 Kod: EEL-1-616-s Punkty ECTS: 2 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
Nazwa modułu: Technika mikroprocesorowa Rok akademicki: 2013/2014 Kod: EEL-1-616-s Punkty ECTS: 2 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
Metodyki i techniki programowania
 Metodyki i techniki programowania dr inż. Maciej Kusy Katedra Podstaw Elektroniki Wydział Elektrotechniki i Informatyki Politechnika Rzeszowska Elektronika i Telekomunikacja, sem. 2 Plan wykładu Sprawy
Metodyki i techniki programowania dr inż. Maciej Kusy Katedra Podstaw Elektroniki Wydział Elektrotechniki i Informatyki Politechnika Rzeszowska Elektronika i Telekomunikacja, sem. 2 Plan wykładu Sprawy
Metodyki i techniki programowania
 Metodyki i techniki programowania dr inż. Maciej Kusy Katedra Podstaw Elektroniki Wydział Elektrotechniki i Informatyki Politechnika Rzeszowska Elektronika i Telekomunikacja, sem. 2 Plan wykładu Sprawy
Metodyki i techniki programowania dr inż. Maciej Kusy Katedra Podstaw Elektroniki Wydział Elektrotechniki i Informatyki Politechnika Rzeszowska Elektronika i Telekomunikacja, sem. 2 Plan wykładu Sprawy
Elementy automatyki i miernictwa przemysłowego. Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż.
 Elementy automatyki i miernictwa przemysłowego PRz 2015 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów.
Elementy automatyki i miernictwa przemysłowego PRz 2015 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów.
1. Cel ćwiczenia. 2. Podłączenia urządzeń zewnętrznych w sterowniku VersaMax Micro
 1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
1. Cel ćwiczenia Celem ćwiczenia jest zaprojektowanie sterowania układem pozycjonowania z wykorzystaniem sterownika VersaMax Micro oraz silnika krokowego. Do algorytmu pozycjonowania wykorzystać licznik
Załącznik Nr 5 do Zarz. Nr 33/11/12
 Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ZAAWANSOWANE PROGRAMOWANIE STEROWNIKÓW PRZEMYSŁOWYCH 3. Karta przedmiotu ważna
Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ZAAWANSOWANE PROGRAMOWANIE STEROWNIKÓW PRZEMYSŁOWYCH 3. Karta przedmiotu ważna
2014-05-05. Automatyka i Regulacja Automatyczna PRz 2013. Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński
 Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
Logiczne układy bistabilne przerzutniki.
 Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Zautomatyzowane systemy produkcyjne Kod przedmiotu
 Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
Zautomatyzowane systemy produkcyjne - opis przedmiotu Informacje ogólne Nazwa przedmiotu Zautomatyzowane systemy produkcyjne Kod przedmiotu 06.6-WZ-LogP-ZSP-S16 Wydział Kierunek Wydział Ekonomii i Zarządzania
ALGORYTMY. 1. Podstawowe definicje Schemat blokowy
 ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
ALGORYTMY 1. Podstawowe definicje Algorytm (definicja nieformalna) to sposób postępowania (przepis) umożliwiający rozwiązanie określonego zadania (klasy zadań), podany w postaci skończonego zestawu czynności
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Technologie informacyjne - wykład 12 -
 Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Zakład Fizyki Budowli i Komputerowych Metod Projektowania Instytut Budownictwa Wydział Budownictwa Lądowego i Wodnego Politechnika Wrocławska Technologie informacyjne - wykład 12 - Prowadzący: Dmochowski
Standardowe bloki funkcjonalne
 Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Sterowniki programowalne i regulatory cyfrowe
 Sterowniki programowalne i regulatory cyfrowe Dr inŝ. Stefan Brock Pok. 627 http:\\www.stefanbrock.neostrada.pl mailto:\\stefan.brock@gmail.com mailto:\\stefan.brock@put.poznan.pl Lista korespondencyjna
Sterowniki programowalne i regulatory cyfrowe Dr inŝ. Stefan Brock Pok. 627 http:\\www.stefanbrock.neostrada.pl mailto:\\stefan.brock@gmail.com mailto:\\stefan.brock@put.poznan.pl Lista korespondencyjna
Zaliczenie - zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Sterownik Visilogic V260
 Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Załącznik Nr 5 do Zarz. Nr 33/11/12
 Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ZAAWANSOWANE PROGRAMOWANIE STEROWNIKÓW PRZEMYSŁOWYCH 3. Karta przedmiotu ważna
Załącznik Nr 5 do Zarz. Nr 33/11/12 (pieczęć wydziału) KARTA PRZEDMIOTU Z1-PU7 WYDANIE N1 Strona 1 z 5 1. Nazwa przedmiotu: ZAAWANSOWANE PROGRAMOWANIE STEROWNIKÓW PRZEMYSŁOWYCH 3. Karta przedmiotu ważna
Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji: E.19 Numer zadania: 01
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2017 Nazwa kwalifikacji: Projektowanie i programowanie urządzeń i systemów mechatronicznych Oznaczenie kwalifikacji:
Ćwiczenie 23. Temat: Własności podstawowych bramek logicznych. Cel ćwiczenia
 Temat: Własności podstawowych bramek logicznych. Cel ćwiczenia Ćwiczenie 23 Poznanie symboli własności. Zmierzenie parametrów podstawowych bramek logicznych TTL i CMOS. Czytanie schematów elektronicznych,
Temat: Własności podstawowych bramek logicznych. Cel ćwiczenia Ćwiczenie 23 Poznanie symboli własności. Zmierzenie parametrów podstawowych bramek logicznych TTL i CMOS. Czytanie schematów elektronicznych,
Elektronika i techniki mikroprocesorowe
 Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Elektronika i techniki mikroprocesorowe Technika cyfrowa ZłoŜone one układy cyfrowe Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki Wydział Elektryczny, ul. Krzywoustego 2 PLAN WYKŁADU idea
Podstawy programowania w środowisku Step 7
 GRUPA MT Temat i Autor Podstawy programowania w środowisku Step 7 Krzysztof Bodzek, Arkadiusz Domoracki CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration Automation Portal 2. Konfiguracja sterownika
GRUPA MT Temat i Autor Podstawy programowania w środowisku Step 7 Krzysztof Bodzek, Arkadiusz Domoracki CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration Automation Portal 2. Konfiguracja sterownika
Automatyka i Robotyka I stopień ogólnoakademicki
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
MiAcz2. Programowalne systemy przemysłowe automatyki PLC
 MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA