Wstęp do PLC. Sławomir Mamica
|
|
|
- Leszek Rosiński
- 7 lat temu
- Przeglądów:
Transkrypt
1 Wstęp do PLC Sławomir Mamica Spis treści: 1. Ogólnie o PLCach 2. Programowanie w LD 3. Funkcje i bloki 4. Obsługa programu CoDeSys 5. Przykładowe zadania Literatura: Jerzy Kasprzyk, Programowanie sterowników przemysłowych, (WNT, 2006)
2 Ogólnie o PLCach
3 PLC Programmable Logic Controller (Programowalny Sterownik Logiczny) Uniwersalne urządzenie mikroprocesorowe przeznaczone do sterowania pracą maszyny lub urządzenia technologicznego
4 Budowa sterownika

5 Dane użytkownika Pamięć przeznaczona na dane użytkownika dzieli się na obszary: dane wejściowe, zawierające obraz wejść sterownika, wg normy IEC oznaczane przez %I lub %IX, dane wyjściowe, zawierające obraz wyjść sterownika, wg normy IEC oznaczane przez %Q lub %QX, dane pomocnicze, dane zadeklarowane w programie użytkownika, ale nie przypisane do wejść ani wyjść.
, analogowe (Analog Input, Analog Output).")
6 Moduły wejść-wyjść Pośredniczą w wymianie danych z otoczeniem. Dzielą się na dwa typy: cyfrowe (Digital Input, Digital Output), analogowe (Analog Input, Analog Output). Wszystkie sygnały trafiające do CPU muszą mieć postać cyfrową sygnał wejściowy analogowy jest dekodowany (A/C) (podobnie sygnał wyjściowy C/A).
7 Podłączenie predefiniowanych zmiennych wejściowych cyfrowych (IX, X = 1, 2, ), analogowych (IX_Analog) oraz wyjściowy cyfrowych (QX) do elementów sterujących (przyciski, potencjometry) oraz sterowanych (diody).
8 Podstawowe zadanie sterownika Generowanie sygnałów sterujących w odpowiedzi na zmiany sygnałów wejściowych, zgodnie z przyjętym algorytmem sterowania lub regulacji. Zadanie to realizowane jest poprzez cykliczny odczyt stanu sygnałów wejściowych sterownika, realizację programu użytkownika oraz aktualizację sygnałów wyjściowych sterownika. Pojedynczy cykl pracy sterownika zwany jest cyklem programowym (ang. Program Sweep).
9 Cykl programowy Pojedynczy cykl pracy sterownika. Realizowany w zewnętrznej, bezwarunkowej pętli typu WHILE. Podzielony na fazy. Odpowiednio krótki (aby zapewnić pracę w czasie rzeczywistym). Możliwość ustawienia czasu trwania cyklu na stałą wartość (Constant Sweep). Zależnie od trybu pracy sterownika niektóre fazy mogą nie występować lub podlegać ograniczeniom.
10 Fazy cyklu programowego Kolejna faza zaczyna się dopiero po zakończeniu poprzedniej! Porządkowanie cyklu (Housekeeping). Czytanie stanów wejść (Data Input). Wykonanie programu użytkownika (Program Execution). Aktualizacja stanów wyjść (Data Output). Obsługa urządzeń zewnętrznych (Service External Devices). Wykonanie funkcji diagnostycznych (Diagnostics).
11 Programowanie w LD
12 Programowanie PLC Schemat drabinkowy (Ladder diagram, LD) Należy do grupy języków graficznych Powstał jako odpowiednik stykowych obwodów przekaźnikowych, w którym oprócz symboli styków, cewek i połączeń między nimi, dopuszcza się także użycie funkcji (np. arytmetycznych, logicznych, porównań, relacji) oraz bloków funkcjonalnych (np. przerzutniki, czasomierze, liczniki). Język IL (Instruction List - Lista rozkazów), będący odpowiednikiem asemblera, którego zbiór instrukcji obejmuje operacje logiczno-arytmetyczne, operacje relacji, jak również funkcje przerzutników, czasomierzy, liczników itp. Programowanie w IL nie jest wymagane na egzaminie
13 Styki i cewki w LD Klucz (przycisk) Cewka zwierny X rozwierny X Q1 Q2 Odpowiedniki w LD: X X Q1 Q2 Odpowiedniki w IL: LD X LDN X ST Q1 STN Q2 (zmienna do CR) (z CR do zmiennej)
14 Funkcje logiczne w LD Szczebelek drabiny funkcja logiczna Przycisk argument funkcji Wartość funkcji cewka Jeśli szczebelek przewodzi, to wartość funkcji przez niego realizowanej wynosi 1. Zawsze 1 Funkcja logiczna Wartość funkcji
15 Bramki logiczne w LD AND: a b Q NAND: a b Q OR: a Q NOR: a Q b b XOR: a b Q XNOR: a b Q a b a b
16 Przerzutniki Przerzutnik (ang. flip-flop) jest to układ sekwencyjny, którego sygnał na wyjściu może zależeć od stanu na jego wejściu lub od jego stanu wewnętrznego. Istnieją trzy rodzaje przerzutników bistabilne, monostabilne oraz astabilne. W układach cyfrowych najczęściej stosowane są przerzutniki bistabilne mogące być stosowane jako układy pamiętające. Grupa połączonych ze sobą przerzutników bistabilnych może tworzyć tzw. rejestr.
17 Przerzutnik typu RS Przerzutnik asynchroniczny (choć jest też wersja synchroniczna) Wejście Set Wejście Reset Q Q Wyjścia Działanie: Set ustawia (przypisuje 1) wyjście Q Reset zeruje wyjście Q
18 Przerzutnik typu RS / SR RS R - priorytetowy SR S - priorytetowy Funkcja przełączająca Q = ( Q + S) R Funkcja przełączająca Q = QR + S Algebra kluczy : Algebra kluczy : Q R Q Q R Q S S
19 Cewki S i R Cewka S (Set) ustawiająca W odpowiedzi na 1 ustawia zmienną (ale nie może zmiennej wyzerować!) S Cewka R (Reset) zerująca W odpowiedzi na 1 zeruje zmienną (ale nie może zmiennej ustawić!) R
20 Przerzutniki raz jeszcze RS Przycisk S - ustawia Przycisk R - zeruje S R Q S Q R SR Przycisk R - zeruje Przycisk S - ustawia R S Q R Q S
21 Funkcje i bloki
22 Funkcje a bloki funkcyjne Podstawowa różnica między funkcją a blokiem funkcyjnym: wywołanie funkcji z tymi samymi argumentami (parametrami wejściowymi) zawsze daje tę samą wartość na wyjściu (wartość funkcji), wywołanie bloku funkcyjnego z tymi samymi parametrami wejściowymi nie musi prowadzić do tych samych wartości wyjściowych. Przyczyna: zmienne wewnętrzne bloku funkcyjnego są pamiętane pomiędzy kolejnymi wywołaniami przechowując informację o jego stanie wewnętrznym ( element dynamiczny ), zmienne wewnętrzne funkcji nie są pamiętane ( element statyczny ).
23 Bloki funkcyjne Egzemplarz (ukonkretnienie, instancja, ang. instance) bloku funkcyjnego zmienna typu będącego blokiem funkcyjnym. Posiada unikalną nazwę oraz własną realizację struktury danych. (Podobnie do obiektu określonej klasy w językach programowania wyższego poziomu.) Dzięki temu wartości zmiennych wewnętrznych i wyjściowych są przechowywane pomiędzy kolejnymi wywołaniami (w kolejnych cyklach programowych). Zwraca wartości poprzez zmienne wyjściowe może ich być więcej niż jedna. Nazwa egzemplarza może być użyta na wejściu funkcji lub innego bloku funkcyjnego.
24 Bloki funkcyjne Deklaracja bloku funkcyjnego (a w zasadzie typu będącego blokiem funkcyjnym): Słowo kluczowe Nazwa (typu) Deklaracje zmiennych: Wejściowych Wyjściowych Wewnętrznych

25 Bloki funkcyjne Użycie bloku funkcyjnego w LD (dwa egzemplarze) Typ bloku Nazwa egzemplarza Poszczególne egzemplarze deklarowane tak jak inne zmienne w jednostce wywołującej
26 Bloki funkcyjne Zmienne wejściowe i wyjściowe w egzemplarzu występują w takiej samej kolejności jak w deklaracji Deklaracja bloku Realizacja bloku Sposób komunikacji z blokiem funkcyjnym zmienne wewnętrzne są niewidoczne

27 Bloki funkcyjne Przypisanie zmiennych uwaga na typ Deklaracja bloku Deklaracje zmiennych w jednostce wywołującej Realizacja bloku
28 Bloki funkcyjne Deklaracja bloku Pierwsza zmienna na liście zmiennych wejściowych oraz wyjściowych BOOL pogrzebna do zawieszenia drabince bloku na Jeśli inna błąd przypisania Realizacja bloku
29 Bloki funkcyjne Przypisanie zmiennych zakres deklaracji zmiennych Zmienna zadeklarowana w jednostce wywoływanej Zmienna zadeklarowana w jednostce wywołującej Każda z nazw zmiennych jest unikalna w swojej jednostce POU więc nie ma konfliktu (to nie dotyczy nazw typów, np. nazwy typu bloku funkcyjnego) Wyjątek 2: egzemplarz jako zmienna globalna
30 Funkcje Funkcja nie posiada zmiennych wyjściowych. Zwraca wartość (tylko jedną) poprzez nazwę funkcji, więc w ciele funkcji trzeba jej nazwie przypisać wynik. Nie posiada egzemplarzy wartości zmiennych wewnętrznych nie są przechowywane pomiędzy kolejnymi wywołaniami. Zmienne lokalne funkcji nie są pamiętane, nawet gdyby je zadeklarować jako RETAIN (bateryjne podtrzymanie zmiennych). Podobnie jak dla bloków funkcyjnych, zmienne wejściowe w wywołaniu pojawiają się w takiej kolejności jak w deklaracji. Pierwsza zmienna wejściowa powinna być typu BOOL (do zawieszenia funkcji na drabince).

31 Funkcje Deklaracja funkcji Słowo kluczowe Nazwa funkcji Deklaracje zmiennych: Wejściowych Typ zwracanej wartości Wewnętrznych Brak zmiennych wyjściowych Przykładowe przypisanie wyniku do nazwy funkcji

32 Funkcje Użycie funkcji w LD (dwa razy) Brak egzemplarzy na liście zmiennych jednostki wywołującej. Nazwa funkcji przypisana do zmiennej Brak możliwości kontynuowania szczebelka po użyciu funkcji.
33 Bloki z wejściem EN W drabinkach funkcje są wywoływane w postaci bloków z wejściem EN. Aby funkcja została wywołana na EN musi pojawić się 1. Co daje możliwości warunkowego wywołania funkcji. (Nie tylko funkcje można obudować blokiem z EN.)
34 Obsługa programu CoDeSys

35 Moeller CoDeSys Demo (free):



36 W wersji DEMO

37 Typ POU + język funkcjonalny, funkcyjny Diagram drabinkowy

38 Okno robocze
39 Wstawianie elementów programu Wstaw przycisk (szeregowo) Wstaw cewkę Wstaw przycisk równolegle do zaznaczonego fragmentu Neguj cewkę lub przycisk Przełącz cewkę na: setującą / resetującą / zwykłą
 Neguj cewkę lub")

40 Wstawianie elementów programu Z menu Wstaw (Insert) oraz Dodatki (Extras) lub menu kontekstowego: Wstaw szczebelek (przed lub za zaznaczonym) Neguj cewkę lub przycisk Wstaw przycisk (szeregowo) Wstaw przycisk równolegle do zaznaczonego fragmentu Wstaw cewkę Wstaw blok funkcyjny Przełącz cewkę na: setującą / resetującą / zwykłą



41 Deklarowanie zmiennych Po wpisaniu nazwy zmiennej (z wyjątkiem predefiniowanych) pojawia się okienko deklaracji zmiennych: Klasa: wejściowe, wyjściowe, wewnętrzne Nazwa zmiennej Typ zmiennej
42 Simulation mode On logowanie do wirtualnego sterownika (brak wymiany informacji ze sprzętem) (konieczność wymuszenia stanu zmiennych dwuklik + F7) Off logowanie do rzeczywistego sterownika (musi być fizycznie podłączony) (odczyt ze sterownika nadrzędny nad odczytem z wizualizacji - por. dalej)
43 Uruchomienie programu 1. Logowanie


44 Uruchomienie programu 2. Ładowanie programu jeśli nie ma błędów!!! Możliwe błędy: Komunikacji (np.: brak podłączonego PLC, źle skonfigurowane połączenie, uszkodzony kabel) Programu (np.: błędy w deklaracjach zmiennych, błędy składniowe)
45 Uruchomienie programu 3. Start (Run) Czarny - aktywny Szary - nieaktywny Zalogowany Program uruchomiony Wymuszone wartości Tryb symulacji ON

46 Program w akcji Podgląd aktualnych wartości zmiennych Niebieski = 1

47 Ponowna edycja po wylogowaniu
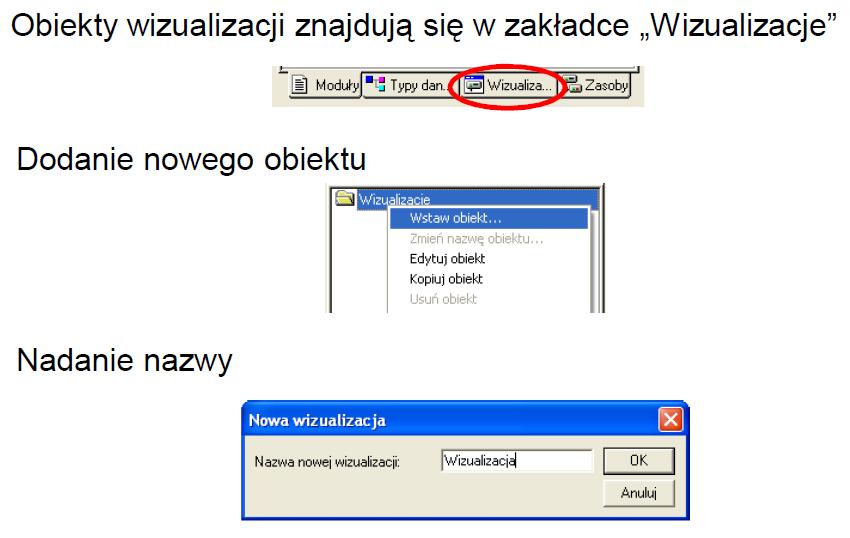
48 Wizualizacja

49 Nowy zestaw ikon Obszar roboczy tu budujemy wizualizację
")
50 (Dwuklik na elemencie) Wizualizacja
51 Wizualizacja

52 Wizualizacja

53 Wizualizacja

54 Wizualizacja

55
56 Bloki funkcyjne listy zmiennych
57 Przykładowe zadania
58 Przykłady 1. Sumator liczb czterobitowych Proszę napisać program (LD) dodający dwie liczby czterobitowe (binarne). 2. Sterowanie drzwiami w tramwaju (wersja prymitywna) Proszę napisać program (LD) sterujący drzwiami w tramwaju. Tramwaj ma dwoje drzwi otwieranych na żądanie pasażera. (Osobne przyciski, z których każdy otwiera tylko jedne drzwi. Przyciski z zatrzaskiem żądanie otwarcia drzwi jest zapamiętywane.) Drzwi mogą być otwarte o ile motorniczy na to zezwoli. Włączenie blokady otwarcia drzwi jest równoznaczne z ich zamknięciem. 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami) Proszę napisać program (LD) sterujący pracą grzałki w pewnym procesie technologicznym. Układ posiada włącznik główny (przycisk) oraz dwa wejścia, na których sygnał oznacza osiągnięcie określonego poziomu temperatury: dolnego i górnego (1 na wejściu oznacza, iż temperatura jest co najmniej na danym poziomie, a 0, że jest niższa). Zadaniem sterownika jest utrzymanie temperatury pomiędzy tymi dwoma poziomami.
59 Uwaga, spoiler!
60 Podpowiedź 2. Sterowanie drzwiami w tramwaju (wersja prymitywna) Proszę napisać program (LD) sterujący drzwiami w tramwaju. Tramwaj ma dwoje drzwi otwieranych na żądanie pasażera. (Osobne przyciski, z których każdy otwiera tylko jedne drzwi. Przyciski z zatrzaskiem żądanie otwarcia drzwi jest zapamiętywane.) Drzwi mogą być otwarte o ile motorniczy na to zezwoli. Włączenie blokady otwarcia drzwi jest równoznaczne z ich zamknięciem. Najprostsze układy z pamięcią to przerzutniki. Zatrzask to inna nazwa przerzutnika. Co jest sygnałem do wyzerowania żądania otwarcia drzwi? Jeśli blokada ma również zamykać otwarte drzwi, to działa jak Reset w RS. Kluczowa jest tu właściwa kolejność cewek S i R! Tabela prawdy? We własnym zakresie :)
 (dla drzwi 1) Przycisk pasażera Sygnałżądania otwarcia drzwi Sygnał otwierający drzwi Blokada Dlaczego po wykonaniu szczebelka nr 2 drzwi nie")
61 Realizacja w LD 2. Sterowanie drzwiami w tramwaju (wersja prymitywna) (dla drzwi 1) Przycisk pasażera Sygnałżądania otwarcia drzwi Sygnał otwierający drzwi Blokada Dlaczego po wykonaniu szczebelka nr 2 drzwi nie zaczynają się otwierać? Jeśli naciśnięty P1 to zatrzaśnij żądanie otwarcia drzwi Jeśli ustawione żądanie to ustaw sygnał otwierający drzwi Jeśli ustawiona blokada to resetuj sygnał otwierający drzwi Jeśli drzwi się otwierają to resetuj żądanie otwarcia drzwi
62 Podpowiedź 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami) Proszę napisać program (LD) sterujący pracą grzałki w pewnym procesie technologicznym. Układ posiada włącznik główny (przycisk) oraz dwa wejścia, na których sygnał oznacza osiągnięcie określonego poziomu temperatury: dolnego i górnego (1 na wejściu oznacza, iż temperatura jest co najmniej na danym poziomie, a 0, że jest niższa). Zadaniem sterownika jest utrzymanie temperatury pomiędzy tymi dwoma poziomami. Czyżby znowu zatrzask? Tabela prawdy znowu się przyda
63 Rozwiązanie 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami) Zadaniem sterownika jest utrzymanie temperatury pomiędzy dwoma poziomami. High Low Q ? X za zimno (temp. niższa niż Low) zostaw jak było (pamiętaj Q, zatrzask) błąd za ciepło (temp. wyższa niż High) Czyli: High = Reset, /Low = Set + sytuacja niedopuszczalna Oczywiście, jeśli mamy błąd, to grzałkę dobrze jest wyłączyć. Czyli RS + błąd

64 Rozwiązanie 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami) RS błąd

 Do zmiany koloru przypisujemy")


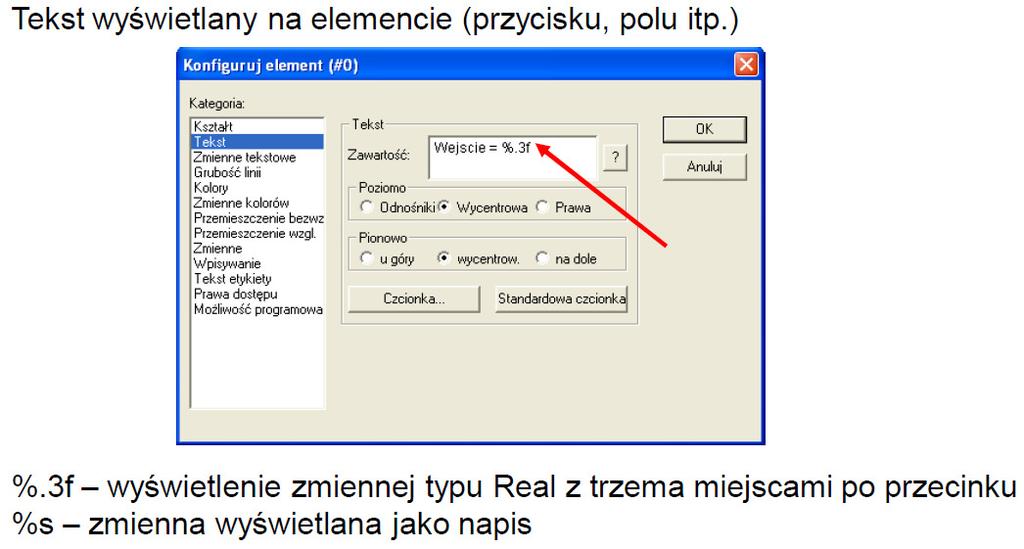
65 Wizualizacja 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami) Ustawiamy kolor dla 1 (Alarm) Do zmiany koloru przypisujemy zmienną (jeśli nie jest zmienną predefiniowaną to poprzedzić nazwą bloku!) Podobnie dla pozostałych tylko Grzałka i Błąd nie powinny ustawiać zmiennych! A dzięki temu klik na prostokącie przełącza wartość zmiennej

66 Wizualizacja w akcji 3. Sterowanie z histerezą (grzałka, wersja z ogranicznikami)
67 1. Sumator liczb czterobitowych Podpowiedź 1 Proszę napisać program (LD) dodający dwie liczby czterobitowe (binarne). Zorganizować dodawanie dla dwóch bitów (można w bloku funkcyjnym). Tabela prawdy może być użytecznym narzędziem.
68 1. Sumator liczb czterobitowych Podpowiedź 2 Proszę napisać program (LD) dodający dwie liczby czterobitowe (binarne). W systemie dwójkowym mamy tylko dwie cyfry: 0 i 1. Dodawanie jest przemienne i łączne.
69 1. Sumator liczb czterobitowych Podpowiedź 3 Proszę napisać program (LD) dodający dwie liczby czterobitowe (binarne). Dodajemy trzy bity (uwzględniając bit przeniesienia z poprzedniej pozycji). Nie ma znaczenia ich źródło. Otrzymujemy wynik (Q) i przeniesienie (P).
70 1. Sumator liczb czterobitowych Tabele prawdy dla Q i P. Funkcja przełączająca dla Q i P. Redukcja funkcji przełączających. Rozwiązanie A B C P Q P = ABC + ABC + ABC + Postać zredukowana: P = BC + AC + AB ABC Q = ABC + ABC + ABC + Postać zredukowana: ABC Q = A B C XOR
 Q = ( A")
71 Realizacja w LD 1. Sumator liczb czterobitowych (na razie jednobitowych) Q = ( A B) C = ( A B) C + ( A B)C P = BC + AC + AB
72 Realizacja w LD 1. Sumator liczb czterobitowych (połączyć kaskadowo sumatory jednobitowe ) Ax, Bx bity dodawanych liczb (od najmłodszych) Qx bity wyniku P przeniesienie (wystarczy jeden bit) Na pierwszym stopniu nie ma przeniesienia, więc można go uprościć (dodawanie dwóch bitów, a nie trzech).
73 Realizacja w LD 1. Sumator liczb czterobitowych (połączyć kaskadowo sumatory jednobitowe )

74 Realizacja w LD (2) 1. Sumator liczb czterobitowych (połączyć kaskadowo sumatory jednobitowe jako bloki funkcyjne) Deklaracje zmiennych wejściowych i wyjściowych!!!
75 I to by było na tyle
Podstawy Elektroniki i Elektrotechniki. Sławomir Mamica
 Podstawy Elektroniki i Elektrotechniki Sławomir Mamica mamica@amu.edu.pl O przedmiocie. Pracownia elektroniki analogowej (PEA) protokoły (obecność) 2. Pracownia elektroniki cyfrowej (PLC) obecności + kolokwium
Podstawy Elektroniki i Elektrotechniki Sławomir Mamica mamica@amu.edu.pl O przedmiocie. Pracownia elektroniki analogowej (PEA) protokoły (obecność) 2. Pracownia elektroniki cyfrowej (PLC) obecności + kolokwium
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Architektura systemów komputerowych
 Architektura systemów komputerowych Sławomir Mamica Wykład 2: Między sprzętem a matematyką http://main5.amu.edu.pl/~zfp/sm/home.html W poprzednim odcinku O przedmiocie: architektura jako organizacja, może
Architektura systemów komputerowych Sławomir Mamica Wykład 2: Między sprzętem a matematyką http://main5.amu.edu.pl/~zfp/sm/home.html W poprzednim odcinku O przedmiocie: architektura jako organizacja, może
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Cyfrowe układy sekwencyjne. 5 grudnia 2013 Wojciech Kucewicz 2
 Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
Cyfrowe układy sekwencyjne 5 grudnia 2013 Wojciech Kucewicz 2 Układy sekwencyjne Układy sekwencyjne to takie układy logiczne, których stan wyjść zależy nie tylko od aktualnego stanu wejść, lecz również
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Standardowe bloki funkcjonalne
 Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
Standardowe bloki funkcjonalne Wykorzystując języki ST i LD należy zapoznać się z działaniem standardowych bloków funkcjonalnych (elementy dwustanowe (bistabilne), elementy detekcji zbocza, liczniki, czasomierze)
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
Automatyzacja i robotyzacja procesów produkcyjnych
 Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Automatyzacja i robotyzacja procesów produkcyjnych Instrukcja laboratoryjna Technika cyfrowa Opracował: mgr inż. Krzysztof Bodzek Cel ćwiczenia. Celem ćwiczenia jest zapoznanie studenta z zapisem liczb
Kurs STARTER S5. Spis treści. Dzień 1. III Budowa wewnętrzna, działanie i obsługa sterownika (wersja 0504)
") I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Programowanie sterowników PLC wprowadzenie
 Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Tworzenie prostego programu w językach ST i LD
 Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5.
 Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje
Pracownia elektryczna i elektroniczna. Elektronika cyfrowa. Ćwiczenie nr 5. Klasa III Opracuj projekt realizacji prac związanych z badaniem działania cyfrowych bloków arytmetycznych realizujących operacje
Podstawy układów mikroelektronicznych
 Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
Podstawy układów mikroelektronicznych wykład dla kierunku Technologie Kosmiczne i Satelitarne Część 2. Podstawy działania układów cyfrowych. dr inż. Waldemar Jendernalik Katedra Systemów Mikroelektronicznych,
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Cyfrowe Elementy Automatyki. Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem
 Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Cyfrowe Elementy Automatyki Bramki logiczne, przerzutniki, liczniki, sterowanie wyświetlaczem Układy cyfrowe W układach cyfrowych sygnały napięciowe (lub prądowe) przyjmują tylko określoną liczbę poziomów,
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające
 PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
PRZERZUTNIKI: 1. Należą do grupy bloków sekwencyjnych, 2. podstawowe układy pamiętające Zapamiętywanie wartości wybranych zmiennych binarnych, jak również sekwencji tych wartości odbywa się w układach
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Podstawy programowania w środowisku Totally Integration Automation Portal
 GRUPA MT Temat i Autor Podstawy programowania w środowisku Totally Integration Automation Portal Krzysztof Bodzek, Arkadiusz Domoracki, Grzegorz Jarek CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration
GRUPA MT Temat i Autor Podstawy programowania w środowisku Totally Integration Automation Portal Krzysztof Bodzek, Arkadiusz Domoracki, Grzegorz Jarek CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration
LEKCJA. TEMAT: Funktory logiczne.
 TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
TEMAT: Funktory logiczne. LEKCJA 1. Bramką logiczną (funktorem) nazywa się układ elektroniczny realizujący funkcje logiczne jednej lub wielu zmiennych. Sygnały wejściowe i wyjściowe bramki przyjmują wartość
Opis szybkiego uruchomienia programu APBSoft
 Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
Krótkie przypomnienie
 Krótkie przypomnienie Prawa de Morgana: Kod Gray'a A+ B= Ā B AB= Ā + B Układ kombinacyjne: Tablicy prawdy Symbolu graficznego Równania Boole a NOR Negative-AND w.11, p.1 XOR Układy arytmetyczne Cyfrowe
Krótkie przypomnienie Prawa de Morgana: Kod Gray'a A+ B= Ā B AB= Ā + B Układ kombinacyjne: Tablicy prawdy Symbolu graficznego Równania Boole a NOR Negative-AND w.11, p.1 XOR Układy arytmetyczne Cyfrowe
" Sterowniki programowalne f.1/1
 PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
UKŁADY CYFROWE. Układ kombinacyjny
 UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
UKŁADY CYFROWE Układ kombinacyjny Układów kombinacyjnych są bramki. Jedną z cech układów kombinacyjnych jest możliwość przedstawienia ich działania (opisu) w postaci tabeli prawdy. Tabela prawdy podaje
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Spis treści. Dzień 1. I Rozpoczęcie pracy ze sterownikiem (wersja 1707) II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400
 II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400") ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
Układy kombinacyjne 1
 Układy kombinacyjne 1 Układy kombinacyjne są to układy cyfrowe, których stany wyjść są zawsze jednoznacznie określone przez stany wejść. Oznacza to, że doprowadzając na wejścia tych układów określoną kombinację
Układy kombinacyjne 1 Układy kombinacyjne są to układy cyfrowe, których stany wyjść są zawsze jednoznacznie określone przez stany wejść. Oznacza to, że doprowadzając na wejścia tych układów określoną kombinację
Podstawy programowania w środowisku Step 7
 GRUPA MT Temat i Autor Podstawy programowania w środowisku Step 7 Krzysztof Bodzek, Arkadiusz Domoracki CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration Automation Portal 2. Konfiguracja sterownika
GRUPA MT Temat i Autor Podstawy programowania w środowisku Step 7 Krzysztof Bodzek, Arkadiusz Domoracki CEL ĆWICZENIA 1. Poznanie narzędzia Totally Integration Automation Portal 2. Konfiguracja sterownika
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
1.1. Wymogi bezpieczeństwa Pomoc techniczna TIA Portal V13 instalacja i konfiguracja pakietu...18
 3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
ĆWICZENIE 7. Wprowadzenie do funkcji specjalnych sterownika LOGO!
 ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
ćwiczenie nr 7 str.1/1 ĆWICZENIE 7 Wprowadzenie do funkcji specjalnych sterownika LOGO! 1. CEL ĆWICZENIA: zapoznanie się z zaawansowanymi możliwościami mikroprocesorowych sterowników programowalnych na
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Cyfrowe układy scalone c.d. funkcje
 Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Cyfrowe układy scalone c.d. funkcje Ryszard J. Barczyński, 206 Politechnika Gdańska, Wydział FTiMS, Katedra Fizyki Ciała Stałego Materiały dydaktyczne do użytku wewnętrznego Kombinacyjne układy cyfrowe
Istnieje wiele metod przekształcania algorytmów wprogram sterujący.
 Metody programowania sterowników swobodnie programowalnych Wykład 9.3 Metody programowania sterowników swobodnie programowalnych Istnieje wiele metod przekształcania algorytmów wprogram sterujący. W1993
Metody programowania sterowników swobodnie programowalnych Wykład 9.3 Metody programowania sterowników swobodnie programowalnych Istnieje wiele metod przekształcania algorytmów wprogram sterujący. W1993
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...7 4. FUNKCJE LOGICZNE...11 Automat : ZSN 5R od: v. 1.0 Computers
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...7 4. FUNKCJE LOGICZNE...11 Automat : ZSN 5R od: v. 1.0 Computers
Kurs SIMATIC S7-300/400 i TIA Portal - Zaawansowany. Spis treści. Dzień 1
 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
f we DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu
 DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
DZIELNIKI I PODZIELNIKI CZĘSTOTLIWOŚCI Dzielnik częstotliwości: układ dający impuls na wyjściu co P impulsów na wejściu f wy f P Podzielnik częstotliwości: układ, który na każde p impulsów na wejściu daje
Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U Eksploatacja URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia Opracował mgr inż.
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U Eksploatacja URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia Opracował mgr inż.
Podstawy programowania sterowników SIMATIC S w języku LAD / Tomasz Gilewski. Legionowo, cop Spis treści
 Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
dwójkę liczącą Licznikiem Podział liczników:
 1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
1. Dwójka licząca Przerzutnik typu D łatwo jest przekształcić w przerzutnik typu T i zrealizować dzielnik modulo 2 - tzw. dwójkę liczącą. W tym celu wystarczy połączyć wyjście zanegowane Q z wejściem D.
UKŁADY KOMBINACYJNE WPROWADZENIE. przerzutniki, bramki ze sprzężeniami zwrotnymi. Układ przełączający Y t. Q t stan wewnętrzny
 UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC
Funkcje logiczne X = A B AND. K.M.Gawrylczyk /55
 Układy cyfrowe Funkcje logiczne AND A B X = A B... 2/55 Funkcje logiczne OR A B X = A + B NOT A A... 3/55 Twierdzenia algebry Boole a A + B = B + A A B = B A A + B + C = A + (B+C( B+C) ) = (A+B( A+B) )
Układy cyfrowe Funkcje logiczne AND A B X = A B... 2/55 Funkcje logiczne OR A B X = A + B NOT A A... 3/55 Twierdzenia algebry Boole a A + B = B + A A B = B A A + B + C = A + (B+C( B+C) ) = (A+B( A+B) )
Programowanie sterowników B&R
 POLITECHNIKA POZNAŃSKA Programowanie sterowników B&R Instrukcja nr 1 Język drabinkowy LD Arkadiusz Kubacki 2015-10-01 1. Tworzenie nowego projektu w Automation Studio Po uruchomieniu programu Automation
POLITECHNIKA POZNAŃSKA Programowanie sterowników B&R Instrukcja nr 1 Język drabinkowy LD Arkadiusz Kubacki 2015-10-01 1. Tworzenie nowego projektu w Automation Studio Po uruchomieniu programu Automation
Ćw. 7: Układy sekwencyjne
 Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Ćw. 7: Układy sekwencyjne Wstęp Celem ćwiczenia jest zapoznanie się z sekwencyjnymi, cyfrowymi blokami funkcjonalnymi. W ćwiczeniu w oparciu o poznane przerzutniki zbudowane zostaną następujące układy
Inwerter logiczny. Ilustracja 1: Układ do symulacji inwertera (Inverter.sch)
") DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
DSCH2 to program do edycji i symulacji układów logicznych. DSCH2 jest wykorzystywany do sprawdzenia architektury układu logicznego przed rozpoczęciem projektowania fizycznego. DSCH2 zapewnia ergonomiczne
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5
 Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Podstawy programowania PLC w języku drabinkowym - ćwiczenie 5 1. Cel ćwiczenia Zapoznanie się z podstawowymi elementami języka drabinkowego i zasadami programowania Programowalnych Sterowników Logicznych
Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi. Przebieg ćwiczenia
 Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Bramki logiczne Podstawowe składniki wszystkich układów logicznych
 Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Sterownik Visilogic V260
 Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Sterownik Visilogic V260 Konfiguracja sprzętowa Po wykonaniu konfiguracji sprzętowej (skojarzeniu odpowiedniego modułu SNAP I/O) można przystąpić do tworzenia aplikacji przy użyciu trzech edytorów
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1
 Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Kurs SIMATIC S7-300/400 i TIA Portal - Podstawowy. Spis treści. Dzień 1. I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503)
") Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
Spis treści Dzień 1 I System SIEMENS SIMATIC S7 - wprowadzenie (wersja 1503) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur. Piotr Fita
 Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Podstawy elektroniki cyfrowej dla Inżynierii Nanostruktur Piotr Fita Elektronika cyfrowa i analogowa Układy analogowe - przetwarzanie sygnałów, których wartości zmieniają się w sposób ciągły w pewnym zakresie
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Programowanie w językach asemblera i C
 Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Programowanie w językach asemblera i C Mariusz NOWAK Programowanie w językach asemblera i C (1) 1 Dodawanie dwóch liczb - program Napisać program, który zsumuje dwie liczby. Wynik dodawania należy wysłać
Proste układy sekwencyjne
 Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
Proste układy sekwencyjne Układy sekwencyjne to takie w których niektóre wejścia są sterowany przez wyjściaukładu( zawierają sprzężenie zwrotne ). Układy sekwencyjne muszą zawierać elementy pamiętające
PODSTAWY TEORII UKŁADÓW CYFROWYCH
 PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY KODUJĄCE Kodery Kodery Kodery służą do przedstawienia informacji z tylko jednego aktywnego wejścia na postać binarną. Ponieważ istnieje fizyczna możliwość jednoczesnej
PODSTAWY TEORII UKŁADÓW CYFROWYCH UKŁADY KODUJĄCE Kodery Kodery Kodery służą do przedstawienia informacji z tylko jednego aktywnego wejścia na postać binarną. Ponieważ istnieje fizyczna możliwość jednoczesnej
Sterowniki programowalne
 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Spis treœci. Co to jest mikrokontroler? Kody i liczby stosowane w systemach komputerowych. Podstawowe elementy logiczne
 Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Spis treści 5 Spis treœci Co to jest mikrokontroler? Wprowadzenie... 11 Budowa systemu komputerowego... 12 Wejścia systemu komputerowego... 12 Wyjścia systemu komputerowego... 13 Jednostka centralna (CPU)...
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU
 Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
Instrukcja podstawowego uruchomienia sterownika PLC LSIS serii XGB XBC-DR20SU Spis treści: 1. Instalacja oprogramowania XG5000 3 2. Tworzenie nowego projektu i ustawienia sterownika 7 3. Podłączenie sterownika
LICZNIKI PODZIAŁ I PARAMETRY
 LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LICZNIKI PODZIAŁ I PARAMETRY Licznik jest układem służącym do zliczania impulsów zerojedynkowych oraz zapamiętywania ich liczby. Zależnie od liczby n przerzutników wchodzących w skład licznika pojemność
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Elementy struktur cyfrowych. Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych.
 Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
Elementy struktur cyfrowych Magistrale, układy iterowane w przestrzeni i w czasie, wprowadzanie i wyprowadzanie danych. Magistrale W układzie bank rejestrów do przechowywania danych. Wybór źródła danych
Automatyka. Treść wykładów: Multiplekser. Układ kombinacyjny. Demultiplekser. Koder
 Treść wykładów: utomatyka dr inż. Szymon Surma szymon.surma@polsl.pl http://zawt.polsl.pl/studia pok., tel. +48 6 46. Podstawy automatyki. Układy kombinacyjne,. Charakterystyka,. Multiplekser, demultiplekser,.
Treść wykładów: utomatyka dr inż. Szymon Surma szymon.surma@polsl.pl http://zawt.polsl.pl/studia pok., tel. +48 6 46. Podstawy automatyki. Układy kombinacyjne,. Charakterystyka,. Multiplekser, demultiplekser,.
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Część 3. Układy sekwencyjne. Układy sekwencyjne i układy iteracyjne - grafy stanów TCiM Wydział EAIiIB Katedra EiASPE 1
 Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Część 3 Układy sekwencyjne Układy sekwencyjne i układy iteracyjne - grafy stanów 18.11.2017 TCiM Wydział EAIiIB Katedra EiASPE 1 Układ cyfrowy - przypomnienie Podstawowe informacje x 1 x 2 Układ cyfrowy
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZSN 5U od: v. 1.0
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...5 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZSN 5U od: v. 1.0
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZTR 5 od: v. 1.0
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1. ZASADA DZIAŁANIA...2 2. FUNKCJE WEJŚCIOWE...4 3. FUNKCJE WYJŚCIOWE...6 4. FUNKCJE LOGICZNE...9 Zabezpieczenie : ZTR 5 od: v. 1.0
Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego Projekt prostego układu sekwencyjnego Ćwiczenia Audytoryjne Podstawy Automatyki i Automatyzacji mgr inż. Paulina Mazurek Warszawa 2013 1 Wstęp Układ
Podstawy elektroniki cz. 2 Wykład 2
 Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
Podstawy elektroniki cz. 2 Wykład 2 Elementarne prawa Trzy elementarne prawa 2 Prawo Ohma Stosunek natężenia prądu płynącego przez przewodnik do napięcia pomiędzy jego końcami jest stały R U I 3 Prawo
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu
 jest to podstawowy element pamiętający każdego układu") Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Temat: Sprawdzenie poprawności działania przerzutników. Wstęp: Przerzutnik (z ang. flip-flop) jest to podstawowy element pamiętający każdego układu cyfrowego, przeznaczonego do przechowywania i ewentualnego
Przerzutnik ma pewną liczbę wejść i z reguły dwa wyjścia.
 Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Kilka informacji o przerzutnikach Jaki układ elektroniczny nazywa się przerzutnikiem? Przerzutnikiem bistabilnym jest nazywany układ elektroniczny, charakteryzujący się istnieniem dwóch stanów wyróżnionych
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano
 Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy
 PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
PLC1: Programowanie sterowników logicznych SIEMENS SIMATIC S7-300/400 - kurs podstawowy DZIEŃ 1 Idea sterowania procesu lub maszyny: Sterowanie za pomocą przekaźników Sterowanie dedykowane Sterowanie za
AHDL - Język opisu projektu. Podstawowe struktury języka. Komentarz rozpoczyna znak i kończy znak %. SUBDESIGN
 AHDL - Język opisu projektu. Podstawowe struktury języka Przykładowy opis rewersyjnego licznika modulo 64. TITLE "Licznik rewersyjny modulo 64 z zerowaniem i zapisem"; %------------------------------------------------------------
AHDL - Język opisu projektu. Podstawowe struktury języka Przykładowy opis rewersyjnego licznika modulo 64. TITLE "Licznik rewersyjny modulo 64 z zerowaniem i zapisem"; %------------------------------------------------------------
Zadania do wykładu 1, Zapisz liczby binarne w kodzie dziesiętnym: ( ) 2 =( ) 10, ( ) 2 =( ) 10, (101001, 10110) 2 =( ) 10
 2 =( ) 10, ( ) 2 =( ) 10, (101001, 10110) 2 =( ) 10") Zadania do wykładu 1,. 1. Zapisz liczby binarne w kodzie dziesiętnym: (1011011) =( ) 10, (11001100) =( ) 10, (101001, 10110) =( ) 10. Zapisz liczby dziesiętne w naturalnym kodzie binarnym: (5) 10 =( ),
Zadania do wykładu 1,. 1. Zapisz liczby binarne w kodzie dziesiętnym: (1011011) =( ) 10, (11001100) =( ) 10, (101001, 10110) =( ) 10. Zapisz liczby dziesiętne w naturalnym kodzie binarnym: (5) 10 =( ),
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ
 INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-12 STEROWANIE UKŁADEM PNEUMATYCZNYCH SIŁOWNIKÓW ZA POMOCĄ STEROWNIKA M91-2-UA2 Micro-OPLC firmy UNITRONICS Koncepcja
INSTYTUT OBRABIAREK I TECHNOLOGII BUDOWY MASZYN POLITECHNIKI ŁÓDZKIEJ ĆWICZENIE NR P-12 STEROWANIE UKŁADEM PNEUMATYCZNYCH SIŁOWNIKÓW ZA POMOCĄ STEROWNIKA M91-2-UA2 Micro-OPLC firmy UNITRONICS Koncepcja
Sterowniki programowalne. System GE Fanuc serii 90-30 Zasady działania systemu (część I)
") Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Wykład w ramach przedmiotu Sterowniki programowalne System GE Fanuc serii 90-30 Zasady działania systemu (część I) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski Plan wykładu
Plan wykładu. Architektura systemów komputerowych. Cezary Bolek
 Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
Architektura systemów komputerowych Poziom układów logicznych. Układy sekwencyjne Cezary Bolek Katedra Informatyki Plan wykładu Układy sekwencyjne Synchroniczność, asynchroniczność Zatrzaski Przerzutniki
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE. Wydział Informatyki, Elektroniki i Telekomunikacji LABORATORIUM.
 AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE Wydział Informatyki, Elektroniki i Telekomunikacji Katedra Elektroniki LABORATORIUM Elektronika LICZNIKI ELWIS Rev.1.0 1. Wprowadzenie Celem
AKADEMIA GÓRNICZO-HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE Wydział Informatyki, Elektroniki i Telekomunikacji Katedra Elektroniki LABORATORIUM Elektronika LICZNIKI ELWIS Rev.1.0 1. Wprowadzenie Celem
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja
 Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
Podstawowe elementy układów cyfrowych układy sekwencyjne Rafał Walkowiak Wersja 0.1 29.10.2013 Przypomnienie - podział układów cyfrowych Układy kombinacyjne pozbawione właściwości pamiętania stanów, realizujące
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
1. SFC W PAKIECIE ISAGRAF 2. EDYCJA PROGRAMU W JĘZYKU SFC. ISaGRAF WERSJE 3.4 LUB 3.5 1
 ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń.
 1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
1.Zasada działania2 Funkcje_logiczne_wejsciowe_i_wyjsciowe_UTXvTR 16.04.09 Funkcje: wejściowe, wyjściowe i logiczne. Konfigurowanie zabezpieczeń. 1.ZASADA DZIAŁANIA... 2 2. FUNKCJE WEJŚCIOWE... 4 2.1 Zasada
Sterownik nagrzewnic elektrycznych HE module
 Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterowniki PLC. Sterowniki PLC. Wprowadzenie nazewnictwo. Historia. Dlaczego sterowniki PLC stały się tak popularne?
 Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz
Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz