UKŁADY KOMBINACYJNE WPROWADZENIE. przerzutniki, bramki ze sprzężeniami zwrotnymi. Układ przełączający Y t. Q t stan wewnętrzny
|
|
|
- Monika Janik
- 8 lat temu
- Przeglądów:
Transkrypt
1 UKŁADY KOMBINACYJNE PRz 2013 Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD PLC Control. Niepoprawne pomiary. Zadanie przykładowe II. WPROWADZENIE 1. Układy przełączające Podział Układy przełączające Realizacje sprzętowe Układy kombinacyjne Układy sekwencyjne Układy kombinacyjne (bez pamięci) Układy sekwencyjne (z pamięcią) bramki bez sprzężeń zwrotnych przerzutniki, bramki ze sprzężeniami zwrotnymi Opis matematyczny X t Układ przełączający Y t Układy kombinacyjne Yt ( X t ) aktualny stan wyjść zależy wyłącznie od aktualnego stanu wejść. Qt 1 ( Qt, X t ) Układy sekwencyjne Q t stan wewnętrzny Yt ( Qt, X t ) Stan wyjść zależy od wejść i stanu wewnętrznego (zależnego od poprzednich wejść pamięć: Y t = µ(δ(q t-1, X t-1 ), X t )). 2. Metodologia projektowania układów kombinacyjnych Sformułowanie tablicy wejść/wyjść Utworzenie funkcji przełączającej metodą Karnaugha Realizacja sprzętowa bramki Realizacja programowa (języki C, ST, ew. inne) funkcja przełączająca wzór (podstawowa realizacja) schemat bramkowy funkcje AND, OR, NOT tablica wejść/wyjść indeksem do tablicy jest kombinacja we/wy zestaw instrukcji if then else odpowiadający tablicy we/wy Niepoprawne pomiary - 1 -
2 3. Struktura programu w prostym sterowniku Inicjalizacja Odczyt wejść Obliczenia Ustawienie wyjść Wizualizacja (ew.) Oczekiwanie Cykl wykonywania programu np. 10 ms, 0.1 s lub ponowne rozpoczęcie zaraz po poprzednim wykonaniu. Wizualizacja LEDy, bargrafy, wyświetlacz LCD. 1. Sterowanie nagrzewaniem ZADANIE PRZYKŁADOWE I c b a µk G1 G2 a, b, c: 0 temperatura poniżej poziomu 1 temperatura powyżej poziomu lub mu równa G1, G2 grzejniki Zadanie: a b c t < a t < b t < c t G1 G2 obydwa grzejniki włączone G1 - - G Tablica wejść/wyjść c b a G1 G Inaczej tablica zero jedynkowa, tablica prawdy Uwaga. Stany nie ujęte w tablicy reprezentują awarie czujników pomiarowych (typowa reakcja na uszkodzenie wyłączyć zasilanie)
3 1. Reguły tworzenia tablic Karnaugha METODA KARNAUGHA Chodzi o sformułowanie możliwie prostego wzoru, aby ułatwić realizację sprzętową (w realizacji programowej znaczenie minimalizacji jest mniejsze). Wyjścia rozpatruje się oddzielnie. Współrzędne pól elementarnych opisane są refleksyjnym kodem Graya. Puste pola uzupełnia się znakami nieokreśloności (-). 2. Tablice zadania G1 ba c G2 ba c Reguły upraszczania łączenie pól elementarnych Wszystkie pola 1 muszą być objęte Liczba pól łączonych ze sobą musi być potęgą 2 (1, 2, 4, 8, ). Połączone pola muszą tworzyć prostokąt lub kwadrat, im większy tym lepiej. Pola - dołącza się do pól 1. Pola mogą zachodzić na siebie. Górny i dolny wiersz uważa się za sąsiednie, jak również lewą i prawą kolumnę (ze względu na kod Graya). G1 ba c G2 ba c Tworzenie wynikowych wzorów kolumny Wypisać kolumny wejść odpowiadające zakreślonym obszarom. Utworzyć iloczyn z tych wejść, które w wypisanych kolumnach mają niezmienione wartości (stale 0 lub 1), przy czym 1 odpowiada sygnałowi prostemu, a 0 zanegowanemu. Wynikowy wzór jest sumą wzorów powstałych z zaznaczonych obszarów
4 G1 c b a b G1 b G2 c b a c b a c b iloczyn a G2 a bc suma Uwagi. Zaznaczenie zbyt małych obszarów w tablicy Karnaugha nie jest błędem, ale wynikowy wzór się rozrasta (nie jest minimalny), bo iloczynów w końcowej sumie przybywa. Zjawisko hazardu obecne w realizacjach sprzętowych nie występuje w realizacjach programowych, ponieważ obliczenia są wykonywane w tym samym cyklu (nie ma różnicy czasów propagacji bramek). SCHEMAT SPRZĘTOWY a b a b G1 c c bc G2 Programowym odpowiednikiem schematów sprzętowych jest graficzny język FBD. PROGRAM W C 1. Operatory logiczne char typ zmiennych logicznych! negacja, && iloczyn logiczny, suma logiczna 2. if else tablica wejść/wyjść - 4 -
 IL lista rozkazów (Instruction List) LD schemat drabinkowy (Ladder Diagram) FBD funkcjonalny schemat")
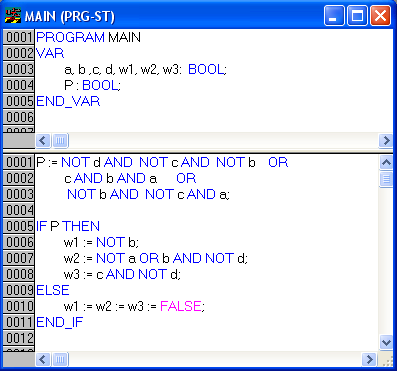
5 Wersja powyższa ujmuje także przypadek z niepoprawnymi pomiarami (G1=0, G2=0 zob. dalej). PROGRAM W ST Norma PN EN : 2004(4). Sterowniki programowalne. Część 3: Języki programowania definiuje pięć języków: ST tekst strukturalny (Structured Text) IL lista rozkazów (Instruction List) LD schemat drabinkowy (Ladder Diagram) FBD funkcjonalny schemat blokowy (Function Block Diagram) SFC sekwencyjny schemat funkcjonalny (Sequential Function Chart) Będziemy stosować pakiet TwinCAT sterowników PLC/PAC firmy Beckhoff. 1. Operatory logiczne 2. IF THEN ELSE 1. Elementy PROGRAM W LD zmienna wejściowa prosta argument zmienna zanegowana - 5 -

6 zmienna wyjściowa rezultat szczebel pusty wzór 2. Operacje logiczne a Suma c Iloczyn a b c b c = a + b c = a b 3. Program zadanie I G1 b G2 a bc PROGRAM ST W ŚRODOWISKU TWINCAT PLC CONTROL 1. Uruchomienie systemu System > Start jeśli system jest już uruchomiony, to Start wyszarzone

7 Odpowiedź Cancel na pytanie o rejestrację. PLC Control Pojawia się okno TwinCAT PLC Control z ostatnio uruchamianym projektem. 2. Nowy projekt File > New Typ systemu docelowego Symulacja i prace domowe PC or CX (x86) Laboratorium CX(ARM) - 7 -

8 Język programowania ST Pojawia się puste okno edytora programu z Untitled jako nazwą projektu. Górna część jest przeznaczona na deklaracje zmiennych i bloków funkcjonalnych, a dolna na właściwy kod. 3. Kodowanie, kompilacja Deklaracje i kod Project > Build lub Rebuild all - 8 -
, tutaj katalog Sterowanie nagrzewaniem, i w nim zapisać plik z kodem źródłowym")
9 Informacja o wyniku kompilacji w dolnej części okna Na warningi nie należy zwracać uwagi. Zapis pliku File > Save Należy najpierw utworzyć katalog na pliki projektu (których może być nawet kilkanaście), tutaj katalog Sterowanie nagrzewaniem, i w nim zapisać plik z kodem źródłowym tutaj Nagrzewanie.pro (rozszerzenie dodawane automatycznie). 4. Symulacja Online > Choose Run Time System - 9 -

10 Local > RunTime 1 (Port 801) lokalny komputer PC Ładowanie programu Online > Login Odpowiedź Tak na pytanie o załadowanie programu. Początkowe wartości zmiennych. Online > Run
 Language LD PROGRAM LD PLC CONTROL Okno edytora LD deklaracje w górnej części (j.p.) dolna część przeznaczona na schemat; widoczny jeden szczebel drabinki.")
11 5. Zapisywanie nowej wartości 2 kl. zmienna Pojawia się proponowana nowa wartość. Online > Write Values lub Ctrl+F7 6. Zakończenie Online > Logout 1. Nowy projekt, typ POU, język LD File > New PC or CX (x86) Language LD PROGRAM LD PLC CONTROL Okno edytora LD deklaracje w górnej części (j.p.) dolna część przeznaczona na schemat; widoczny jeden szczebel drabinki

12 2. Tworzenie schematu LD Wybór miejsca, menu kontekstowe (prawy klawisz myszy) > wybór elementu schematu, np. Contact (negated). Pojawia się styk zanegowany, bez nazwy zmiennej pytajniki??? Nazwa zmiennej Zaznaczyć??? > przycisk F2 > okno Input assistant > wybór zmiennej, np. b
 Ładowanie Online > Login (początkowe wartości zmiennych) Uruchomienie")
13 Pełny schemat Kompilacja Project > Build Zapis pliku File > Save Najpierw utworzono katalog Nagrzewanie LD na pliki projektu. 3. Symulacja Online > Choose Run Time System > Local > RunTime 1 (Port 801) Ładowanie Online > Login (początkowe wartości zmiennych) Uruchomienie Online > Run

14 4. Nowa wartość zmiennej 2 kl. styk, np. a Połowa styku zmienia kolor; proponowana nowa wartość widoczna także w górnej części okna (deklaracje). Ctrl + F7 lub Online > Write Values 1. Tablica poprawności pomiarów NIEPOPRAWNE POMIARY c b a P P = 1 pomiary poprawne P = 0 pomiary niepoprawne
15 2. Tablica Karnaugha ba c Uwaga. Teraz w tablicy Karnaugha dotyczącej poprawności pomiarów nie ma pól - (nie ma nieokreśloności). 3. Wzór + P cb ab 4. Wymaganie technologiczne W przypadku niepoprawnych pomiarów obydwie grzałki należy wyłączyć G1=G2=0. 5. Programowanie C ST LD P a b P P b c
16 1. Sterowanie nagrzewaniem Włączanie grzejników: równolegle G1, G2, gdy t < t a tylko G1, gdy t a t < t b tylko G2, gdy t b t < t c szeregowo G1, G2, gdy t c t < t d wyłączone G1, G2, gdy t d t ZADANIE PRZYKŁADOWE II zasilanie d c b µk w1 w2 w1 w2 a w3 G1 G2 Połączenie powyższe pozwala uzyskać cztery stopnie mocy grzejnej przy dwóch grzejnikach. 2. Tablica wejść/wyjść otwarty w3 d c b a w 1 w 2 w
17 3. Tablice Karnaugha i kolumny w 1 ba dc d c b a b w 1 b w 2 ba dc d c b a d c b a d b a w 2 a bd w 3 ba dc d c b a d c w 3 cd 4. Programowanie stan normalny C dodatkowe deklaracje ST
18 5. Niepoprawne pomiary Tablica poprawności ba dc Zmienna P d cb cba d ca P dcb cba dca Programowanie C ST
19 - 19 -
UKŁADY KOMBINACYJNE WPROWADZENIE. przerzutniki, bramki ze sprzężeniami zwrotnymi. Układ przełączający Y t
 PRz AiSD W1 UKŁADY KOMBINACYJNE Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD
PRz AiSD W1 UKŁADY KOMBINACYJNE Wprowadzenie. Zadanie przykładowe I. Metoda Karnaugha. Schemat sprzętowy. Program w C. Program w ST. Program w LD. Program ST w środowisku TwinCAT PLC Control. Program LD
ŚRODOWISKO TWINCAT DLA STEROWNIKA CX9000 BECKHOFF
 PWSZ SW W6 ŚRODOWISKO TWINCAT DLA STEROWNIKA CX9000 BECKHOFF System Manager połączenie ze sterownikiem. PLC Control tworzenie programu. Przypisanie zmiennych do kanałów I/O. PLC Control program z I/O w
PWSZ SW W6 ŚRODOWISKO TWINCAT DLA STEROWNIKA CX9000 BECKHOFF System Manager połączenie ze sterownikiem. PLC Control tworzenie programu. Przypisanie zmiennych do kanałów I/O. PLC Control program z I/O w
Tworzenie prostego programu w językach ST i LD
 Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
Tworzenie prostego programu w językach ST i LD Tworzenie prostego programu w języku ST - wprowadzenie Aby utworzyć program należy uruchomić narzędzie TwinCAT PLC Control. Klawisz myszy otwiera okno PLC
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie
 TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
TwinCAT 3 konfiguracja i uruchomienie programu w języku ST lokalnie 1. Uruchomienie programu TwinCAT 3: a) Kliknąć w start i wpisać wpisać frazę twincat. b) Kliknąć w ikonę jak poniżej: 2. Wybrać w menu
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
EC4P Pierwszy program w 6 krokach
 EC4P Pierwszy program w 6 krokach Strona - 1 Wymagania / Przygotowanie Instalacja easy Soft CoDeSys Zakłada si, e adna z wersji easysoft CoDeSys nie jest zainstalowana. Podczas instalacji wykonuj poszczególne
EC4P Pierwszy program w 6 krokach Strona - 1 Wymagania / Przygotowanie Instalacja easy Soft CoDeSys Zakłada si, e adna z wersji easysoft CoDeSys nie jest zainstalowana. Podczas instalacji wykonuj poszczególne
Wykład nr 1 Techniki Mikroprocesorowe. dr inż. Artur Cichowski
 Wykład nr 1 Techniki Mikroprocesorowe dr inż. Artur Cichowski ix jy i j {0,1} {0,1} Dla układów kombinacyjnych stan dowolnego wyjścia y i w danej chwili czasu zależy wyłącznie od aktualnej kombinacji stanów
Wykład nr 1 Techniki Mikroprocesorowe dr inż. Artur Cichowski ix jy i j {0,1} {0,1} Dla układów kombinacyjnych stan dowolnego wyjścia y i w danej chwili czasu zależy wyłącznie od aktualnej kombinacji stanów
ELEMENTARNA WIZUALIZACJA
 ELEMENTARNA WIZUALIZACJA PRz AiS- 2012 Specyfika wizualizacji w systemach wbudowanych. Elementarna wizualizacja. Ustawianie zmiennej suwak. SPECYFIKA WIZUALIZACJI W SYSTEMACH WBUDOWANYCH 1. Systemy wbudowane
ELEMENTARNA WIZUALIZACJA PRz AiS- 2012 Specyfika wizualizacji w systemach wbudowanych. Elementarna wizualizacja. Ustawianie zmiennej suwak. SPECYFIKA WIZUALIZACJI W SYSTEMACH WBUDOWANYCH 1. Systemy wbudowane
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
b) bc a Rys. 1. Tablice Karnaugha dla funkcji o: a) n=2, b) n=3 i c) n=4 zmiennych.
 bc a Rys. 1. Tablice Karnaugha dla funkcji o: a) n=2, b) n=3 i c) n=4 zmiennych.") DODATEK: FUNKCJE LOGICZNE CD. 1 FUNKCJE LOGICZNE 1. Tablice Karnaugha Do reprezentacji funkcji boolowskiej n-zmiennych można wykorzystać tablicę prawdy o 2 n wierszach lub np. tablice Karnaugha. Tablica
DODATEK: FUNKCJE LOGICZNE CD. 1 FUNKCJE LOGICZNE 1. Tablice Karnaugha Do reprezentacji funkcji boolowskiej n-zmiennych można wykorzystać tablicę prawdy o 2 n wierszach lub np. tablice Karnaugha. Tablica
Architektura komputerów Wykład 2
 Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Architektura komputerów Wykład 2 Jan Kazimirski 1 Elementy techniki cyfrowej 2 Plan wykładu Algebra Boole'a Podstawowe układy cyfrowe bramki Układy kombinacyjne Układy sekwencyjne 3 Algebra Boole'a Stosowana
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Bramki logiczne Podstawowe składniki wszystkich układów logicznych
 Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Układy logiczne Bramki logiczne A B A B AND NAND A B A B OR NOR A NOT A B A B XOR NXOR A NOT A B AND NAND A B OR NOR A B XOR NXOR Podstawowe składniki wszystkich układów logicznych 2 Podstawowe tożsamości
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie
 Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Tranzystor JFET i MOSFET zas. działania
 Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Tranzystor JFET i MOSFET zas. działania brak kanału v GS =v t (cutoff ) kanał otwarty brak kanału kanał otwarty kanał zamknięty w.2, p. kanał zamknięty Co było na ostatnim wykładzie? Układy cyfrowe Najczęściej
Lekcja na Pracowni Podstaw Techniki Komputerowej z wykorzystaniem komputera
 Lekcja na Pracowni Podstaw Techniki Komputerowej z wykorzystaniem komputera Temat lekcji: Minimalizacja funkcji logicznych Etapy lekcji: 1. Podanie tematu i określenie celu lekcji SOSOBY MINIMALIZACJI
Lekcja na Pracowni Podstaw Techniki Komputerowej z wykorzystaniem komputera Temat lekcji: Minimalizacja funkcji logicznych Etapy lekcji: 1. Podanie tematu i określenie celu lekcji SOSOBY MINIMALIZACJI
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Systemy wbudowane. Wprowadzenie. Nazwa. Oznaczenia. Zygmunt Kubiak. Sterowniki PLC - Wprowadzenie do programowania (1)
") ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
ybrane funkcje logiczne prowadzenie L L2 Y Nazwa Oznaczenia Y Sterowniki PLC - prowadzenie do programowania () Proste przykłady Załączenie jednego z dwóch (lub obu) przełączników lub powoduje zapalenie
Rys. 2. Symbole dodatkowych bramek logicznych i ich tablice stanów.
 Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z funktorami realizującymi podstawowe funkcje logiczne poprzez zaprojektowanie, wykonanie i przetestowanie kombinacyjnego układu logicznego realizującego
Cel ćwiczenia Celem ćwiczenia jest zapoznanie się z funktorami realizującymi podstawowe funkcje logiczne poprzez zaprojektowanie, wykonanie i przetestowanie kombinacyjnego układu logicznego realizującego
1. SFC W PAKIECIE ISAGRAF 2. EDYCJA PROGRAMU W JĘZYKU SFC. ISaGRAF WERSJE 3.4 LUB 3.5 1
 ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
ISaGRAF WERSJE 3.4 LUB 3.5 1 1. SFC W PAKIECIE ISAGRAF 1.1. Kroki W pakiecie ISaGRAF użytkownik nie ma możliwości definiowania własnych nazw dla kroków. Z każdym krokiem jest związany tzw. numer odniesienia
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
Laboratorium podstaw elektroniki
 150875 Grzegorz Graczyk numer indeksu imie i nazwisko 150889 Anna Janicka numer indeksu imie i nazwisko Grupa: 2 Grupa: 5 kierunek Informatyka semestr 2 rok akademicki 2008/09 Laboratorium podstaw elektroniki
150875 Grzegorz Graczyk numer indeksu imie i nazwisko 150889 Anna Janicka numer indeksu imie i nazwisko Grupa: 2 Grupa: 5 kierunek Informatyka semestr 2 rok akademicki 2008/09 Laboratorium podstaw elektroniki
SFC zawiera zestaw kroków i tranzycji (przejść), które sprzęgają się wzajemnie przez połączenia
, które sprzęgają się wzajemnie przez połączenia") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Język programowania: Lista instrukcji (IL Instruction List)
") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski 08.12.2009 Norma IEC 1131 Języki tekstowe Języki graficzne
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
Asynchroniczne statyczne układy sekwencyjne
 Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Asynchroniczne statyczne układy sekwencyjne Układem sekwencyjnym nazywany jest układ przełączający, posiadający przynajmniej jeden taki stan wejścia, któremu odpowiadają, zależnie od sygnałów wejściowych
Katedra Systemów Cyfrowego Przetwarzania Sygnałów
 Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Metoda Karnaugh. B A BC A
 Metoda Karnaugh. Powszechnie uważa się, iż układ o mniejszej liczbie elementów jest tańszy i bardziej niezawodny, a spośród dwóch układów o takiej samej liczbie elementów logicznych lepszy jest ten, który
Metoda Karnaugh. Powszechnie uważa się, iż układ o mniejszej liczbie elementów jest tańszy i bardziej niezawodny, a spośród dwóch układów o takiej samej liczbie elementów logicznych lepszy jest ten, który
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014
 Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Lista tematów na kolokwium z wykładu z Techniki Cyfrowej w roku ak. 2013/2014 Temat 1. Algebra Boole a i bramki 1). Podać przykład dowolnego prawa lub tożsamości, które jest spełnione w algebrze Boole
Podstawy Automatyki. Wykład 12 - synteza i minimalizacja funkcji logicznych. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 12 - synteza i minimalizacja funkcji logicznych Instytut Automatyki i Robotyki Warszawa, 2017 Synteza funkcji logicznych Terminy - na bazie funkcji trójargumenowej y = (x 1, x 2, x 3 ) (1) Elementarny
Wykład 12 - synteza i minimalizacja funkcji logicznych Instytut Automatyki i Robotyki Warszawa, 2017 Synteza funkcji logicznych Terminy - na bazie funkcji trójargumenowej y = (x 1, x 2, x 3 ) (1) Elementarny
Język programowania PASCAL
 Język programowania PASCAL (wersja podstawowa - standard) Literatura: dowolny podręcznik do języka PASCAL (na laboratoriach Borland) Iglewski, Madey, Matwin PASCAL STANDARD, PASCAL 360 Marciniak TURBO
Język programowania PASCAL (wersja podstawowa - standard) Literatura: dowolny podręcznik do języka PASCAL (na laboratoriach Borland) Iglewski, Madey, Matwin PASCAL STANDARD, PASCAL 360 Marciniak TURBO
Politechnika Łódzka. Instytut Systemów Inżynierii Elektrycznej
 Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
CoDeSys 3 programowanie w języku FBD
 Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Notatka Aplikacyjna NA 03005PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka FBD... 5 4. Składnia języka FBD
Kontrola topto. 1. Informacje ogólne. 2. Wymagania sprzętowe i programowe aplikacji. 3. Przykładowa instalacja topto. 4. Komunikacja.
 Kontrola topto Obsługa aplikacji Kontrola topto 1. Informacje ogólne. 2. Wymagania sprzętowe i programowe aplikacji. 3. Przykładowa instalacja topto. 4. Komunikacja. 5. Dodawanie, edycja i usuwanie przejść.
Kontrola topto Obsługa aplikacji Kontrola topto 1. Informacje ogólne. 2. Wymagania sprzętowe i programowe aplikacji. 3. Przykładowa instalacja topto. 4. Komunikacja. 5. Dodawanie, edycja i usuwanie przejść.
Algorytm. a programowanie -
 Algorytm a programowanie - Program komputerowy: Program komputerowy można rozumieć jako: kod źródłowy - program komputerowy zapisany w pewnym języku programowania, zestaw poszczególnych instrukcji, plik
Algorytm a programowanie - Program komputerowy: Program komputerowy można rozumieć jako: kod źródłowy - program komputerowy zapisany w pewnym języku programowania, zestaw poszczególnych instrukcji, plik
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Instrukcja uruchomienia sterownika CX9000 firmy Beckhoff. 1. Konfiguracja pakietu TwinCAT do współpracy z sterownikiem CX9000
 Instrukcja uruchomienia sterownika CX9000 firmy Beckhoff 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem CX9000 2. Tworzenie prostego programu w języku ST wprowadzenie 3. Zdalny pulpit systemu
Instrukcja uruchomienia sterownika CX9000 firmy Beckhoff 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem CX9000 2. Tworzenie prostego programu w języku ST wprowadzenie 3. Zdalny pulpit systemu
PIERWSZY PROGRAM W JĘZYKU FBD
 CODESYS PIERWSZY PROGRAM 1 PIERWSZY PROGRAM W JĘZYKU FBD Materiał ten stanowi skróconą wersję opracowania omawiającego pracę w środowisku CoDeSys (plik CoDeSys na stronie przedmiotu). Poniżej przedstawiona
CODESYS PIERWSZY PROGRAM 1 PIERWSZY PROGRAM W JĘZYKU FBD Materiał ten stanowi skróconą wersję opracowania omawiającego pracę w środowisku CoDeSys (plik CoDeSys na stronie przedmiotu). Poniżej przedstawiona
" Sterowniki programowalne f.1/1
 PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
PLC, Programowalne sterowniki logiczne PLC, Programowalny sterownik logiczny (ang. Programmable Logic Controller) to wyspecjalizowane urządzenie mikroprocesorowe wyposażone w programowalną pamięć, sterownik
UKŁADY SEKWENCYJNE WPROWADZENIE
 PRz AiSD W2 UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Urządzenia automatyki i sterowania..
PRz AiSD W2 UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Urządzenia automatyki i sterowania..
dr inż. Małgorzata Langer Architektura komputerów
 Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
Instrukcja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego w projekcie Innowacyjna dydaktyka bez ograniczeń zintegrowany rozwój Politechniki Łódzkiej zarządzanie Uczelnią,
Definicje. Algorytm to:
 Algorytmy Definicje Algorytm to: skończony ciąg operacji na obiektach, ze ściśle ustalonym porządkiem wykonania, dający możliwość realizacji zadania określonej klasy pewien ciąg czynności, który prowadzi
Algorytmy Definicje Algorytm to: skończony ciąg operacji na obiektach, ze ściśle ustalonym porządkiem wykonania, dający możliwość realizacji zadania określonej klasy pewien ciąg czynności, który prowadzi
Opis szybkiego uruchomienia programu APBSoft
 Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
1 second UPS. Poziom trudności: łatwy. Wersja dokumentacji: 1.3. Aktualizacja: 06.02.2015. Beckhoff Automation Sp. z o. o.
 Poziom trudności: łatwy Wersja dokumentacji: 1.3 Aktualizacja: 06.02.2015 Beckhoff Automation Sp. z o. o. Spis treści 1. Wprowadzenie... 2 2. Domyślne wywołanie bloku FB_S_UPS... 3 3. Domyślne wywołanie
Poziom trudności: łatwy Wersja dokumentacji: 1.3 Aktualizacja: 06.02.2015 Beckhoff Automation Sp. z o. o. Spis treści 1. Wprowadzenie... 2 2. Domyślne wywołanie bloku FB_S_UPS... 3 3. Domyślne wywołanie
Podstawowe układy cyfrowe
 ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 4 Podstawowe układy cyfrowe Grupa 6 Prowadzący: Roman Płaneta Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi,
ELEKTRONIKA CYFROWA SPRAWOZDANIE NR 4 Podstawowe układy cyfrowe Grupa 6 Prowadzący: Roman Płaneta Aleksandra Gierut CEL ĆWICZENIA Celem ćwiczenia jest zapoznanie się z podstawowymi bramkami logicznymi,
Układy VLSI Bramki 1.0
 Spis treści: 1. Wstęp... 2 2. Opis edytora schematów... 2 2.1 Dodawanie bramek do schematu:... 3 2.2 Łączenie bramek... 3 2.3 Usuwanie bramek... 3 2.4 Usuwanie pojedynczych połączeń... 4 2.5 Dodawanie
Spis treści: 1. Wstęp... 2 2. Opis edytora schematów... 2 2.1 Dodawanie bramek do schematu:... 3 2.2 Łączenie bramek... 3 2.3 Usuwanie bramek... 3 2.4 Usuwanie pojedynczych połączeń... 4 2.5 Dodawanie
MentorGraphics ModelSim
 MentorGraphics ModelSim 1. Konfiguracja programu Wszelkie zmiany parametrów systemu symulacji dokonywane są w menu Tools -> Edit Preferences... Wyniki ustawień należy zapisać w skrypcie startowym systemu
MentorGraphics ModelSim 1. Konfiguracja programu Wszelkie zmiany parametrów systemu symulacji dokonywane są w menu Tools -> Edit Preferences... Wyniki ustawień należy zapisać w skrypcie startowym systemu
Projektowanie z użyciem procesora programowego Nios II
 Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
Projektowanie z użyciem procesora programowego Nios II WSTĘP Celem ćwiczenia jest nauczenie projektowania układów cyfrowych z użyciem wbudowanych procesorów programowych typu Nios II dla układów FPGA firmy
Koszt literału (literal cost) jest określony liczbą wystąpień literału w wyrażeniu boolowskim realizowanym przez układ.
 jest określony liczbą wystąpień literału w wyrażeniu boolowskim realizowanym przez układ.") Elementy cyfrowe i układy logiczne Wykład Legenda Kryterium kosztu realizacji Minimalizacja i optymalizacja Optymalizacja układów dwupoziomowych Tablica (mapa) Karnaugh a Metoda Quine a-mccluskey a Złożoność
Elementy cyfrowe i układy logiczne Wykład Legenda Kryterium kosztu realizacji Minimalizacja i optymalizacja Optymalizacja układów dwupoziomowych Tablica (mapa) Karnaugh a Metoda Quine a-mccluskey a Złożoność
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Podstawy Automatyki. Wykład 13 - Układy bramkowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA II rok Kierunek Transport Temat: Minimalizacja funkcji logicznych. Projektowanie układów logicznych. Opracował
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYKA II rok Kierunek Transport Temat: Minimalizacja funkcji logicznych. Projektowanie układów logicznych. Opracował
Laboratorium Systemów SCADA
 Laboratorium Systemów SCADA Ćwiczenie 4. Tworzenie skryptów w programie InTouch Opracował: dr hab. inż. Sebastian Dudzik 1. Cel ćwiczenia Zapoznanie się z rodzajami skryptów w programie InTouch. Zapoznanie
Laboratorium Systemów SCADA Ćwiczenie 4. Tworzenie skryptów w programie InTouch Opracował: dr hab. inż. Sebastian Dudzik 1. Cel ćwiczenia Zapoznanie się z rodzajami skryptów w programie InTouch. Zapoznanie
Podstawy Automatyki. Wykład 13 - Układy bramkowe. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Wykład 13 - Układy bramkowe Instytut Automatyki i Robotyki Warszawa, 2015 Układy z elementów logicznych Bramki logiczne Elementami logicznymi (bramkami logicznymi) są urządzenia o dwustanowym sygnale wyjściowym
Kurs STARTER S5. Spis treści. Dzień 1. III Budowa wewnętrzna, działanie i obsługa sterownika (wersja 0504)
") I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
I Dlaczego sterownik? (wersja 0504) Spis treści Dzień 1 I-3 Wady i zalety poszczególnych rodzajów układów sterowania I-4 Charakterystyka rodziny S5 I-5 II Podłączenie sterownika do obiektu (wersja 0504)
ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC
 Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Notatka Aplikacyjna NA 03006PL Maj 2016
 Notatka Aplikacyjna NA 03006PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka IL... 5 4. Składnia języka IL...
Notatka Aplikacyjna NA 03006PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w... 3 3. Organizacja okien dla języka IL... 5 4. Składnia języka IL...
Część 2. Funkcje logiczne układy kombinacyjne
 Część 2 Funkcje logiczne układy kombinacyjne Zapis funkcji logicznych układ funkcjonalnie pełny Arytmetyka Bool a najważniejsze aksjomaty i tożsamości Minimalizacja funkcji logicznych Układy kombinacyjne
Część 2 Funkcje logiczne układy kombinacyjne Zapis funkcji logicznych układ funkcjonalnie pełny Arytmetyka Bool a najważniejsze aksjomaty i tożsamości Minimalizacja funkcji logicznych Układy kombinacyjne
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
W 5_2 Typy języków programowania sterowników PLC (zdefiniowane w IEC-61131) - języki graficzne (LD, FBD); języki tekstowe (ST, IL).
 - języki graficzne (LD, FBD); języki tekstowe (ST, IL).") Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów blokowych FBD, tekstowe: lista instrukcji IL, tekst strukturalny ST, grafów: graf funkcji sekwencyjnych SFC, graf
STEROWANIE URZĄDZENIAMI PRZEMYSŁOWYMI ĆWICZENIE 4 BLOKI FUNKCYJNE
 STEROWANIE URZĄDZENIAMI PRZEMYSŁOWYMI ĆWICZENIE 4 BLOKI FUNKCYJNE Poznań, wrzesień 2014 Przed przystąpieniem do ćwiczenia należy zapoznać się z instrukcją dydaktyczną. Dokonać oględzin urządzeń, przyrządów
STEROWANIE URZĄDZENIAMI PRZEMYSŁOWYMI ĆWICZENIE 4 BLOKI FUNKCYJNE Poznań, wrzesień 2014 Przed przystąpieniem do ćwiczenia należy zapoznać się z instrukcją dydaktyczną. Dokonać oględzin urządzeń, przyrządów
Sterowniki PLC. Sterowniki PLC. Wprowadzenie nazewnictwo. Historia. Dlaczego sterowniki PLC stały się tak popularne?
 Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
Sterowniki PLC Wprowadzenie nazewnictwo Sterownik PLC (Programmable Logic Controller) Sterownik SPS (Speicherprogrammierbare Steuerung) Programowalny sterownik logiczny (sterownik programowalny) Sterownik
2014-05-05. Automatyka i Regulacja Automatyczna PRz 2013. Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński
 Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
Automatyka i Regulacja Automatyczna PRz 2013 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek
PROGRAMY STEROWANIA I WIZUALIZACJI II
 PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
PWSZ SW W8 PROGRAMY STEROWANIA I WIZUALIZACJI II Układ sekwencyjny Start Stop. Podnośnik góra dół. Układ czasowy naprzemienne załączanie/wyłączanie. Sterowanie symulowanym zbiornikiem. 1. Zadanie UKŁAD
Zaliczenie - zagadnienia (aktualizacja )
") Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Tomasz Żabiński Ocena 3.0 Zaliczenie - zagadnienia (aktualizacja 23.01.2017) 1. Podaj na jakie dwie główne grupy dzieli się układy przełączające. 2. Scharakteryzuj układy kombinacyjne. 3. Scharakteryzuj
Podstawy obsługi programów TwinCAT System Manager i TwinCAT PLC Control
 TwinCAT System - kompletny system automatyki dla komputerów PC bazujący na systemie ADS, zmieniający komputer PC w kontroler czasu rzeczywistego, mogący uruchomić wiele systemów PLC, kontrolować osie NC.
TwinCAT System - kompletny system automatyki dla komputerów PC bazujący na systemie ADS, zmieniający komputer PC w kontroler czasu rzeczywistego, mogący uruchomić wiele systemów PLC, kontrolować osie NC.
Automatyka i Regulacja Automatyczna, PRz, r.a. 2011/2012, Żabiński Tomasz
 Wykład 2 Sterowniki programowalne (PLC, PAC), norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników. 1. Sterowniki programowalne - wprowadzenie 2. Norma IEC 61131-3 - wprowadzenie
Wykład 2 Sterowniki programowalne (PLC, PAC), norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników. 1. Sterowniki programowalne - wprowadzenie 2. Norma IEC 61131-3 - wprowadzenie
Sterowniki programowalne (PLC, PAC), norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników.
, norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników.") Wykład 1 Sterowniki programowalne (PLC, PAC), norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników. 1. Sterowniki programowalne - wprowadzenie 2. Norma IEC 61131-3 - wprowadzenie
Wykład 1 Sterowniki programowalne (PLC, PAC), norma IEC61131, proces konfiguracji, programowania i uruchamiania sterowników. 1. Sterowniki programowalne - wprowadzenie 2. Norma IEC 61131-3 - wprowadzenie
PLUTO Sterownik bezpieczeństwa Skrócona Instrukcja obsługi oprogramowania. PlutoProgrammingManualPL_v7A.pdf 1
 PLUTO Sterownik bezpieczeństwa Skrócona Instrukcja obsługi oprogramowania PlutoProgrammingManualPL_v7A.pdf 1 www.jokabsafety.com Spis treści 1. Instalacja oprogramowania 3 2. Podłączenie do komputera..5
PLUTO Sterownik bezpieczeństwa Skrócona Instrukcja obsługi oprogramowania PlutoProgrammingManualPL_v7A.pdf 1 www.jokabsafety.com Spis treści 1. Instalacja oprogramowania 3 2. Podłączenie do komputera..5
Logiczne układy bistabilne przerzutniki.
 Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Przerzutniki spełniają rolę elementów pamięciowych: -przy pewnej kombinacji stanów na pewnych wejściach, niezależnie od stanów innych wejść, stany wyjściowe oraz nie ulegają zmianie; -przy innej określonej
Skrócony przewodnik OPROGRAMOWANIE PC. MultiCon Emulator
 Wspomagamy procesy automatyzacji od 1986 r. Skrócony przewodnik OPROGRAMOWANIE PC MultiCon Emulator Wersja: od v.1.0.0 Do współpracy z rejestratorami serii MultiCon Przed rozpoczęciem użytkowania oprogramowania
Wspomagamy procesy automatyzacji od 1986 r. Skrócony przewodnik OPROGRAMOWANIE PC MultiCon Emulator Wersja: od v.1.0.0 Do współpracy z rejestratorami serii MultiCon Przed rozpoczęciem użytkowania oprogramowania
Modułowy programowalny przekaźnik czasowy firmy Aniro.
 Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Modułowy programowalny przekaźnik czasowy firmy Aniro. Rynek sterowników programowalnych Sterowniki programowalne PLC od wielu lat są podstawowymi systemami stosowanymi w praktyce przemysłowej i stały
Układy logiczne. Wstęp doinformatyki. Funkcje boolowskie (1854) Funkcje boolowskie. Operacje logiczne. Funkcja boolowska (przykład)
 Funkcje boolowskie. Operacje logiczne. Funkcja boolowska (przykład)") Wstęp doinformatyki Układy logiczne komputerów kombinacyjne sekwencyjne Układy logiczne Układy kombinacyjne Dr inż. Ignacy Pardyka Akademia Świętokrzyska Kielce, 2001 synchroniczne asynchroniczne Wstęp
Wstęp doinformatyki Układy logiczne komputerów kombinacyjne sekwencyjne Układy logiczne Układy kombinacyjne Dr inż. Ignacy Pardyka Akademia Świętokrzyska Kielce, 2001 synchroniczne asynchroniczne Wstęp
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC
 Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
Adaptacja sterownika PLC do obiektu sterowania. Synteza algorytmu procesu i sterowania metodą GRAFCET i SFC Proces technologiczny (etap procesu produkcyjnego/przemysłowego) podstawa współczesnych systemów
dr inż. Rafał Klaus Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia i ich zastosowań w przemyśle" POKL
 Technika cyfrowa w architekturze komputerów materiał do wykładu 2/3 dr inż. Rafał Klaus Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii
Technika cyfrowa w architekturze komputerów materiał do wykładu 2/3 dr inż. Rafał Klaus Zajęcia finansowane z projektu "Rozwój i doskonalenie kształcenia na Politechnice Poznańskiej w zakresie technologii
Konfigurowanie sterownika BC8150 firmy Beckhoff wprowadzenie
 Konfigurowanie sterownika BC8150 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BC8150 Stanowisko laboratoryjne ze sterownikiem BC8150 Sterownik BC8150 należy
Konfigurowanie sterownika BC8150 firmy Beckhoff wprowadzenie 1. Konfiguracja pakietu TwinCAT do współpracy ze sterownikiem BC8150 Stanowisko laboratoryjne ze sterownikiem BC8150 Sterownik BC8150 należy
Projektowania Układów Elektronicznych CAD Laboratorium
 Projektowania Układów Elektronicznych CAD Laboratorium ĆWICZENIE NR 3 Temat: Symulacja układów cyfrowych. Ćwiczenie demonstruje podstawowe zasady analizy układów cyfrowych przy wykorzystaniu programu PSpice.
Projektowania Układów Elektronicznych CAD Laboratorium ĆWICZENIE NR 3 Temat: Symulacja układów cyfrowych. Ćwiczenie demonstruje podstawowe zasady analizy układów cyfrowych przy wykorzystaniu programu PSpice.
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne
 Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Wstęp do Techniki Cyfrowej... Synchroniczne układy sekwencyjne Schemat ogólny X Y Układ kombinacyjny S Z Pamięć Zegar Działanie układu Zmiany wartości wektora S możliwe tylko w dyskretnych chwilach czasowych
Laboratorium podstaw elektroniki
 150875 Grzegorz Graczyk numer indeksu imie i nazwisko 150889 Anna Janicka numer indeksu imie i nazwisko Grupa: 2 Grupa: 5 kierunek Informatyka semestr 2 rok akademicki 2008/09 Laboratorium podstaw elektroniki
150875 Grzegorz Graczyk numer indeksu imie i nazwisko 150889 Anna Janicka numer indeksu imie i nazwisko Grupa: 2 Grupa: 5 kierunek Informatyka semestr 2 rok akademicki 2008/09 Laboratorium podstaw elektroniki
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki
 Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
Elementy oprogramowania sterowników. Instrukcje podstawowe, funkcje logiczne, układy czasowe i liczenia, znaczniki Norma IEC-61131-3 definiuje typy języków: graficzne: schematów drabinkowych LD, schematów
2. Architektura mikrokontrolerów PIC16F8x... 13
 Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Spis treści 3 Spis treœci 1. Informacje wstępne... 9 2. Architektura mikrokontrolerów PIC16F8x... 13 2.1. Budowa wewnętrzna mikrokontrolerów PIC16F8x... 14 2.2. Napięcie zasilania... 17 2.3. Generator
Sterowniki programowalne Programmable Controllers. Energetyka I stopień Ogólnoakademicki. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
zmiana stanu pamięci następuje bezpośrednio (w dowolnej chwili czasu) pod wpływem zmiany stanu wejść,
 pod wpływem zmiany stanu wejść,") Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
Sekwencyjne układy cyfrowe Układ sekwencyjny to układ cyfrowy, w którym zależność między wartościami sygnałów wejściowych (tzw. stan wejść) i wyjściowych (tzw. stan wyjść) nie jest jednoznaczna. Stan wyjść
Elementy cyfrowe i układy logiczne
 Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
Elementy cyfrowe i układy logiczne Wykład 5 Legenda Procedura projektowania Podział układów VLSI 2 1 Procedura projektowania Specyfikacja Napisz, jeśli jeszcze nie istnieje, specyfikację układu. Opracowanie
UKŁADY SEKWENCYJNE WPROWADZENIE
 PRz AiRA UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Sterowanie symulowanym zbiornikiem.
PRz AiRA UKŁADY SEKWENCYJNE Wprowadzenie. Napełnianie i opróżnianie. Programowanie. Przerzutnik RS. Układ Start Stop. Automaty w języku LD. Zbiornik z trzema zaworami. Sterowanie symulowanym zbiornikiem.
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT. Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH
 AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH II rok Kierunek Logistyka Temat: Minimalizacja funkcji logicznych.
AKADEMIA MORSKA W SZCZECINIE WI-ET / IIT / ZTT Instrukcja do zajęc laboratoryjnych nr 3 AUTOMATYZACJA I ROBOTYZACJA PROCESÓW PRODUKCYJNYCH II rok Kierunek Logistyka Temat: Minimalizacja funkcji logicznych.
Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie. 1. Konfiguracja pakietu TwinCAT do współpracy z sterownikiem CX1000
 Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX1000 Sterownik CX1000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Konfigurowanie sterownika CX1000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX1000 Sterownik CX1000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1
 Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Przerzutniki RS i JK-MS lab. 04 Układy sekwencyjne cz. 1 PODSTAWY TECHNIKI MIKROPROCESOROWEJ 3EB KATEDRA ENERGOELEKTRONIKI I AUTOMATYKI SYSTEMÓW PRZETWARZANIA ENERGII WWW.KEIASPE.AGH.EDU.PL AKADEMIA GÓRNICZO-HUTNICZA
Technika cyfrowa Synteza układów kombinacyjnych (I)
") Sławomir Kulesza Technika cyfrowa Synteza układów kombinacyjnych (I) Wykład dla studentów III roku Informatyki Wersja 2.0, 05/10/2011 Podział układów logicznych Opis funkcjonalny układów logicznych x 1
Sławomir Kulesza Technika cyfrowa Synteza układów kombinacyjnych (I) Wykład dla studentów III roku Informatyki Wersja 2.0, 05/10/2011 Podział układów logicznych Opis funkcjonalny układów logicznych x 1
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski
 Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski") Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
Język programowania: Lista instrukcji (IL Instruction List) Wykład w ramach przedmiotu: Sterowniki programowalne Opracował dr inż. Jarosław Tarnawski Norma IEC 1131 Języki tekstowe Języki graficzne Języki
Ćwiczenie 1 Program Electronics Workbench
 Systemy teleinformatyczne Ćwiczenie Program Electronics Workbench Symulacja układów logicznych Program Electronics Workbench służy do symulacji działania prostych i bardziej złożonych układów elektrycznych
Systemy teleinformatyczne Ćwiczenie Program Electronics Workbench Symulacja układów logicznych Program Electronics Workbench służy do symulacji działania prostych i bardziej złożonych układów elektrycznych
Zmienne RETAIN i PERSISTENT na PC lub CX
 Zmienne RETAIN i PERSISTENT na PC lub CX Wersja dokumentacji: 1.4 Aktualizacja: 23.02.2016 Beckhoff Automation Sp. z o. o. Spis treści 1. Wstęp... 3 2. Porównanie cech... 3 3. Deklaracja zmiennych w PLC...
Zmienne RETAIN i PERSISTENT na PC lub CX Wersja dokumentacji: 1.4 Aktualizacja: 23.02.2016 Beckhoff Automation Sp. z o. o. Spis treści 1. Wstęp... 3 2. Porównanie cech... 3 3. Deklaracja zmiennych w PLC...
Robert Barański, AGH, KMIW MathScript and Formula Nodes v1.0
 MathScript i Formula Nodes (MathScript and Formula Nodes) Formula Node w oprogramowaniu LabVIEW jest wygodnym, tekstowym węzłem, który można użyć do wykonywania skomplikowanych operacji matematycznych
MathScript i Formula Nodes (MathScript and Formula Nodes) Formula Node w oprogramowaniu LabVIEW jest wygodnym, tekstowym węzłem, który można użyć do wykonywania skomplikowanych operacji matematycznych