Analiza ruchu. Marek Wnuk < > ZPCiR I-6 PWr. MW: SyWizE p.1/22
|
|
|
- Urszula Popławska
- 6 lat temu
- Przeglądów:
Transkrypt
1 Analiza ruchu Marek Wnuk < > ZPCiR I-6 PWr MW: SyWizE p.1/22
2 Ruch w sekwencji obrazów Podstawowe problemy: złożoność obliczeniowa nadmiar informacji niejednoznaczność MW: SyWizE p.2/22
3 Pole ruchu a przepływ optyczny pole ruchu (motion field) rzut trójwymiarowych wektorów ruchu na płaszczyznę obrazu; zawiera informacje o składowej wektora ruchu równoległej do płaszczyzny obrazu; brak informacji o składowej prostopadłej do płaszczyzny obrazu. przepływ optyczny (optical flow) pole wektorowe zawierajace informacje umożliwiajace przekształcenie jednego obrazu w drugi przez przesunięcie obszarów z pierwszego obrazu w drugi; nie jest jednoznacznie określony. MW: SyWizE p.3/22
4 Problemy estymacji przepływu problem szczelinowy (aperture problem) błędne określenie ruchu w przypadku lokalnych zmian jasności obrazu o jednowymiarowym charakterze jednolita barwa lub przezroczystość brak tekstury - ruch obiektu może zostać niezauważony zmienne oświetlenie pozorne ruchy zwiazane z przesuwaniem się cieni na powierzchni obiektów lub przemieszczenia się gradientów jasności; remedium - kompensacja oświetlenia lub wykorzystanie odcienia w przestrzeni HSV zachodzenie obiektów na siebie zanikanie, pojawianie się lub iluzja zmiany obiektów poruszajacych się na obrazie; specyficzne teksturowanie zmiany jasności na obiekcie wzdłuż jednego kierunku prowadza do utratu informacji o ruchu. MW: SyWizE p.4/22
5 Metody detekcji i śledzenia ruchu różnicowe umożliwiajacedetekcję i śledzenie ruchu dzięki różnicom pomiędzy następujacymi klatkami, korelacyjne przeszukujace obraz w poszukiwaniu dopasowania regionów, gradientowe opierajace się na wyznaczeniu pochodnych czasowych i przestrzennych obrazu, częstotliwościowe oparte na filtrach operujacych w dziedzinie częstotliwości. MW: SyWizE p.5/22


6 Metody różnicowe MW: SyWizE p.6/22

7 Historia ruchu MW: SyWizE p.7/22
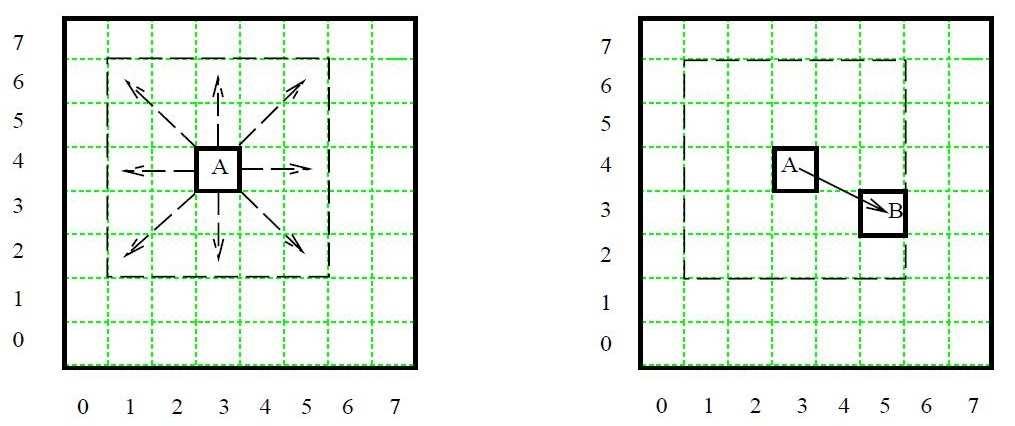
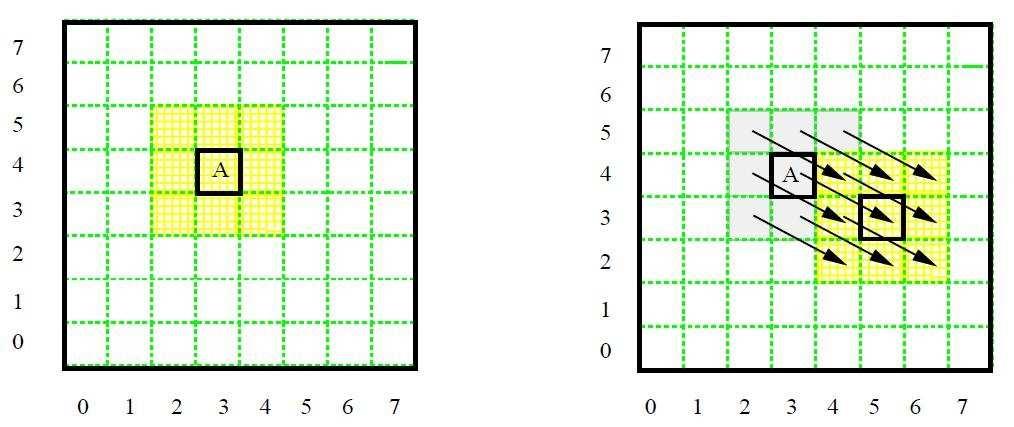
8 Metody korelacyjne MW: SyWizE p.8/22
9 Diamond Search MW: SyWizE p.9/22
 = I(x+δ")

10 Założenia metod gradientowych jasność niezmienna w czasie ruchu I(x,y,t) = I(x+δ x,y+δ y,t + δ t ) niewielkie przesunięcia pomiędzy klatkami spójność przestrzenna MW: SyWizE p.10/22
11 Założenia metod gradientowych I(x,y,t) obraz 2D + t przy założonej stałej jasności punktu na scenie mamy: I x Warunek przepływu: dx dt + I y di dt = 0 I x u+i y v+i t = 0 ; I dy dt + I t = 0 [ u v ] = I t MW: SyWizE p.11/22
12 Lucas Kanade 1D MW: SyWizE p.12/22
13 Lucas Kanade 1D iteracyjnie MW: SyWizE p.13/22
14 Lucas Kanade 2D Warunek przepływu dla jednego punktu: I x u+i y v+i t = 0 ; I [ u v ] = I t daje tylko tzw. przepływ normalny (składowa równoległa do gradientu jasności) MW: SyWizE p.14/22

15 Problem szczelinowy MW: SyWizE p.15/22
16 Lucas Kanade dla otoczenia Rozważajac otoczenie punktu otrzymujemy nadmiarowy układ równań Aw = b: I x (p 1 ) I y (p 1 ) I x (p 2 ) I y (p 2 ).. I x (p 9 ) I y (p 9 ) [ u v ] = I t (p 1 ) I t (p 2 ). I t (p 9 ) który można rozwiazać minimalizujac bład średniokwadratowy: min Aw b 2 (A T A)w = A T b Warunek: odwracalność A T A. [ u v ], = (A T A) 1 A T b. MW: SyWizE p.16/22
17 Punkty dobre do śledzenia (Harris) Macierz autokorelacji: [ ] [ ] [ I x I y ] A T A = I 2 x I x I y I x I y I 2 y = I x I y = I( I) T jest nieosobliwa jeśli ma dwie duże wartości własne, co oznacza, że w otoczeniu punktu występuja wyraźne zmiany jasności w dwóch różnych kierunkach. Punktami dobrze nadajacymi się do śledzenia ruchu sa narożniki, ale nie krawędzie. Dla wektora I: ( I( I) T ) I =(n I( I) T ) I = n I(( I) T I)=(n I 2 ) I a dla wektora E stycznego do krawędzi (prostopadłego do I): ( I( I) T )E = 0 MW: SyWizE p.17/22
18 Dekompozycja piramidalna Potencjalne przyczyny błędnego działania metody: niestałość oświetlenia (jasności punktów na scenie) punkt nie porusza się wraz z całym sasiedztwem (zbyt duże okno?) zbyt duży zakres ruchu (przesunięcia nie powinny przekraczać 1-2 pikseli) Rozwiazanie: zmniejszyć rozdzielczość! MW: SyWizE p.18/22

19 Dekompozycja piramidalna MW: SyWizE p.19/22
20 Horn Schunck Warunek przepływu: e c = ZZ (I x u+i y v+i t ) 2 dydx Warunki gładkosci: e s = ZZ u 2 + v 2 dydx lub: e s = ZZ ( 2 u) 2 +( 2 v) 2 dydx Polioptymalizacja (α 2 - stała regularyzacji): min(e c + α 2 e s ) MW: SyWizE p.20/22
21 Horn Schunck Rozwiazanie zadania wariacyjnego: Przybliżaj od ważonej średniej jego s I x (I x u+i y v+i t ) α 2 2 u = 0 I y (I x u+i y v+i t ) α 2 2 v = 0 ac laplasjan przez odchylenie punktu centralnego u(x, y) asiadów u(x, y): otrzymujemy algorytm iteracyjny: 2 u(x,y) u(x,y) u(x,y) u k+1 = u k I x(i x u k + I y v k + I t ) α 2 + I 2 x + I 2 y v k+1 = v k I y(i x u k + I y v k + I t ) α 2 + I 2 x + I 2 y MW: SyWizE p.21/22
22 Implementacja w OpenCV Lucas Kanade: { imga = cvloadimage(..); imgb = cvloadimage(..);... cvgoodfeaturestotrack(imga,.., cora,..); cvfindcornersubpix(imga,.., cora,..);... cvcalcopticalflowlkpyr(imga, imgb,.., cora, corb,..); } Horn Schunck: { imga = cvloadimage(..); imgb = cvloadimage(..);... cvcalcopticalflowhs(imga, imgb,.., velx, vely); } MW: SyWizE p.22/22
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRONIKI PRACA DYPLOMOWA MAGISTERSKA
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRONIKI KIERUNEK: SPECJALNOŚĆ: Automatyka i Robotyka Robotyka PRACA DYPLOMOWA MAGISTERSKA System wizyjny do rejestrowania zmian w otoczeniu robota Vision system for
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRONIKI KIERUNEK: SPECJALNOŚĆ: Automatyka i Robotyka Robotyka PRACA DYPLOMOWA MAGISTERSKA System wizyjny do rejestrowania zmian w otoczeniu robota Vision system for
Parametryzacja obrazu na potrzeby algorytmów decyzyjnych
 Parametryzacja obrazu na potrzeby algorytmów decyzyjnych Piotr Dalka Wprowadzenie Z reguły nie stosuje się podawania na wejście algorytmów decyzyjnych bezpośrednio wartości pikseli obrazu Obraz jest przekształcany
Parametryzacja obrazu na potrzeby algorytmów decyzyjnych Piotr Dalka Wprowadzenie Z reguły nie stosuje się podawania na wejście algorytmów decyzyjnych bezpośrednio wartości pikseli obrazu Obraz jest przekształcany
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 7 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Filtracja obrazu operacje kontekstowe
 Filtracja obrazu operacje kontekstowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu Poprawa ostrości Usunięcie określonych wad obrazu Poprawa obrazu o złej jakości technicznej Rekonstrukcja
Filtracja obrazu operacje kontekstowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu Poprawa ostrości Usunięcie określonych wad obrazu Poprawa obrazu o złej jakości technicznej Rekonstrukcja
Porównanie skuteczności algorytmów detekcji ruchu dla systemów wizyjnych ruchu ulicznego w wykrywaniu pojazdów
 Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Instytut Informatyki Rok akademicki 2013/2014 PRACA DYPLOMOWA MAGISTERSKA Marcin Nazimek Porównanie skuteczności algorytmów detekcji
Politechnika Warszawska Wydział Elektroniki i Technik Informacyjnych Instytut Informatyki Rok akademicki 2013/2014 PRACA DYPLOMOWA MAGISTERSKA Marcin Nazimek Porównanie skuteczności algorytmów detekcji
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas
 3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
3. KINEMATYKA Kinematyka jest częścią mechaniki, która zajmuje się opisem ruchu ciał bez wnikania w jego przyczyny. Oznacza to, że nie interesuje nas oddziaływanie między ciałami, ani też rola, jaką to
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 8 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Ważne rozkłady i twierdzenia c.d.
 Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Ważne rozkłady i twierdzenia c.d. Funkcja charakterystyczna rozkładu Wielowymiarowy rozkład normalny Elipsa kowariacji Sploty rozkładów Rozkłady jednostajne Sploty z rozkładem normalnym Pobieranie próby
Animowana grafika 3D. Opracowanie: J. Kęsik.
 Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Powierzchnia obiektu 3D jest renderowana jako czarna jeżeli nie jest oświetlana żadnym światłem (wyjątkiem są obiekty samoświecące) Oświetlenie
Animowana grafika 3D Opracowanie: J. Kęsik kesik@cs.pollub.pl Powierzchnia obiektu 3D jest renderowana jako czarna jeżeli nie jest oświetlana żadnym światłem (wyjątkiem są obiekty samoświecące) Oświetlenie
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek ciężkości ułożenie przestrzenne momenty wyższych rzędów promienie max-min centryczność
Analiza obrazu. wykład 4. Marek Jan Kasprowicz Uniwersytet Rolniczy 2009
 Analiza obrazu komputerowego wykład 4 Marek Jan Kasprowicz Uniwersytet Rolniczy 2009 Filtry górnoprzepustowe - gradienty Gradient - definicje Intuicyjnie, gradient jest wektorem, którego zwrot wskazuje
Analiza obrazu komputerowego wykład 4 Marek Jan Kasprowicz Uniwersytet Rolniczy 2009 Filtry górnoprzepustowe - gradienty Gradient - definicje Intuicyjnie, gradient jest wektorem, którego zwrot wskazuje
Prawdopodobieństwo i statystyka
 Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Wykład XIII: Prognoza. 26 stycznia 2015 Wykład XIII: Prognoza. Prognoza (predykcja) Przypuśćmy, że mamy dany ciąg liczb x 1, x 2,..., x n, stanowiących wyniki pomiaru pewnej zmiennej w czasie wielkości
Defi f nicja n aprę r żeń
 Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
Wytrzymałość materiałów Stany naprężeń i odkształceń 1 Definicja naprężeń Mamy bryłę materialną obciążoną układem sił (siły zewnętrzne, reakcje), będących w równowadze. Rozetniemy myślowo tę bryłę na dwie
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż.
 Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
Drgania poprzeczne belki numeryczna analiza modalna za pomocą Metody Elementów Skończonych dr inż. Piotr Lichota mgr inż. Joanna Szulczyk Politechnika Warszawska Instytut Techniki Lotniczej i Mechaniki
PRZETWARZANIE SYGNAŁÓW
 PRZETWARZANIE SYGNAŁÓW SEMESTR V Wykład VIII Podstawy przetwarzania obrazów Filtracja Przetwarzanie obrazu w dziedzinie próbek Przetwarzanie obrazu w dziedzinie częstotliwości (transformacje częstotliwościowe)
PRZETWARZANIE SYGNAŁÓW SEMESTR V Wykład VIII Podstawy przetwarzania obrazów Filtracja Przetwarzanie obrazu w dziedzinie próbek Przetwarzanie obrazu w dziedzinie częstotliwości (transformacje częstotliwościowe)
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. - funkcja dwóch zmiennych,
 IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
IX. Rachunek różniczkowy funkcji wielu zmiennych. 1. Funkcja dwóch i trzech zmiennych - pojęcia podstawowe. Definicja 1.1. Niech D będzie podzbiorem przestrzeni R n, n 2. Odwzorowanie f : D R nazywamy
GRAKO: ŚWIATŁO I CIENIE. Modele barw. Trochę fizyki percepcji światła. OŚWIETLENIE: elementy istotne w projektowaniu
 GRAKO: ŚWIATŁO I CIENIE Metody oświetlania Metody cieniowania Przykłady OŚWIETLENIE: elementy istotne w projektowaniu Rozumienie fizyki światła w realnym świecie Rozumienie procesu percepcji światła Opracowanie
GRAKO: ŚWIATŁO I CIENIE Metody oświetlania Metody cieniowania Przykłady OŚWIETLENIE: elementy istotne w projektowaniu Rozumienie fizyki światła w realnym świecie Rozumienie procesu percepcji światła Opracowanie
x x 1. Przedmiot identyfikacji System x (1) x (2) : x (s) a 1 a 2 : a s mierzone, a = zestaw współczynników konkretyzujacych F ()
 x (2) : x (s) a 1 a 2 : a s mierzone, a = zestaw współczynników konkretyzujacych F ()") . Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x () x (2) x (s) mierzone, a = a a 2 a s zestaw współczynników konkretyzujacych F () informacja
. Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x () x (2) x (s) mierzone, a = a a 2 a s zestaw współczynników konkretyzujacych F () informacja
Filtracja obrazu operacje kontekstowe
 Filtracja obrazu operacje kontekstowe Podział metod filtracji obrazu Metody przestrzenne i częstotliwościowe Metody liniowe i nieliniowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu
Filtracja obrazu operacje kontekstowe Podział metod filtracji obrazu Metody przestrzenne i częstotliwościowe Metody liniowe i nieliniowe Główne zadania filtracji Usunięcie niepożądanego szumu z obrazu
WSTĘP DO PRZETWARZANIA OBRAZÓW. Jak znaleźć ciekawe rzeczy na zdjęciu? mgr Krzysztof Szarzyński
 WSTĘP DO PRZETWARZANIA OBRAZÓW Jak znaleźć ciekawe rzeczy na zdjęciu? mgr Krzysztof Szarzyński Czym jest obraz? Na nasze potrzeby będziemy zajmować się jedynie obrazami w skali szarości. Większość z omawianych
WSTĘP DO PRZETWARZANIA OBRAZÓW Jak znaleźć ciekawe rzeczy na zdjęciu? mgr Krzysztof Szarzyński Czym jest obraz? Na nasze potrzeby będziemy zajmować się jedynie obrazami w skali szarości. Większość z omawianych
Adaptacyjne Przetwarzanie Sygnałów. Filtracja adaptacyjna w dziedzinie częstotliwości
 W Filtracja adaptacyjna w dziedzinie częstotliwości Blokowy algorytm LMS (BLMS) N f n+n = f n + α x n+i e(n + i), i= N L Slide e(n + i) =d(n + i) f T n x n+i (i =,,N ) Wprowadźmy nowy indeks: n = kn (
W Filtracja adaptacyjna w dziedzinie częstotliwości Blokowy algorytm LMS (BLMS) N f n+n = f n + α x n+i e(n + i), i= N L Slide e(n + i) =d(n + i) f T n x n+i (i =,,N ) Wprowadźmy nowy indeks: n = kn (
Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych
 inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
inż. Marek Duczkowski Metoda określania pozycji wodnicy statków na podstawie pomiarów odległości statku od głowic laserowych słowa kluczowe: algorytm gradientowy, optymalizacja, określanie wodnicy W artykule
1. PODSTAWY TEORETYCZNE
 1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
1. PODSTAWY TEORETYCZNE 1 1. 1. PODSTAWY TEORETYCZNE 1.1. Wprowadzenie W pierwszym wykładzie przypomnimy podstawowe działania na macierzach. Niektóre z nich zostały opisane bardziej szczegółowo w innych
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do
 a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do") 0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
0. OpenGL ma układ współrzędnych taki, że oś y jest skierowana (względem monitora) a) w dół b) w górę c) w lewo d) w prawo e) w kierunku do obserwatora f) w kierunku od obserwatora 1. Obrót dookoła osi
6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów
 6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów . Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x ()
6. Identyfikacja wielowymiarowych systemów statycznych metodanajmniejszychkwadratów . Przedmiot identyfikacji System () x (2) x * a z y ( s ) x y = F (x,z)=f(x,z,a ),gdziex = F () znane, a nieznane x ()
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona) f(x) = 0, gdzie. dla n=2 np.
 f(x) = 0, gdzie. dla n=2 np.") Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
Układy równań nieliniowych (wielowymiarowa metoda Newtona-Raphsona f(x 0, f ( f, f,..., f n gdzie 2 x ( x, x 2,..., x n dla n2 np. f ( x, y 0 g( x, y 0 dla każdej wielowymiarowej rozwinięcie w szereg Taylora
Reprezentacja i analiza obszarów
 Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Cechy kształtu Topologiczne Geometryczne spójność liczba otworów liczba Eulera szkielet obwód pole powierzchni środek cięŝkości ułoŝenie przestrzenne momenty wyŝszych rzędów promienie max-min centryczność
Definicje i przykłady
 Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Rozdział 1 Definicje i przykłady 1.1 Definicja równania różniczkowego 1.1 DEFINICJA. Równaniem różniczkowym zwyczajnym rzędu n nazywamy równanie F (t, x, ẋ, ẍ,..., x (n) ) = 0. (1.1) W równaniu tym t jest
Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne
 Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2005/06 Wstęp
Zaawansowane metody numeryczne Komputerowa analiza zagadnień różniczkowych 4. Równania różniczkowe zwyczajne podstawy teoretyczne P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ semestr letni 2005/06 Wstęp
Przedmowa Wykaz oznaczeń Wykaz skrótów 1. Sygnały i ich parametry 1 1.1. Pojęcia podstawowe 1 1.2. Klasyfikacja sygnałów 2 1.3.
 Przedmowa Wykaz oznaczeń Wykaz skrótów 1. Sygnały i ich parametry 1 1.1. Pojęcia podstawowe 1 1.2. Klasyfikacja sygnałów 2 1.3. Sygnały deterministyczne 4 1.3.1. Parametry 4 1.3.2. Przykłady 7 1.3.3. Sygnały
Przedmowa Wykaz oznaczeń Wykaz skrótów 1. Sygnały i ich parametry 1 1.1. Pojęcia podstawowe 1 1.2. Klasyfikacja sygnałów 2 1.3. Sygnały deterministyczne 4 1.3.1. Parametry 4 1.3.2. Przykłady 7 1.3.3. Sygnały
Janusz Adamowski METODY OBLICZENIOWE FIZYKI Kwantowa wariacyjna metoda Monte Carlo. Problem własny dla stanu podstawowego układu N cząstek
 Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdział 20 KWANTOWE METODY MONTE CARLO 20.1 Kwantowa wariacyjna metoda Monte Carlo Problem własny dla stanu podstawowego układu N cząstek (H E 0 )ψ 0 (r)
Janusz Adamowski METODY OBLICZENIOWE FIZYKI 1 Rozdział 20 KWANTOWE METODY MONTE CARLO 20.1 Kwantowa wariacyjna metoda Monte Carlo Problem własny dla stanu podstawowego układu N cząstek (H E 0 )ψ 0 (r)
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Kinematyka: opis ruchu Fizyka I (B+C) Wykład IV: Ruch jednostajnie przyspieszony Ruch harmoniczny Ruch po okręgu Klasyfikacja ruchów Ze względu na tor wybrane przypadki szczególne prostoliniowy, odbywajacy
Przetwarzanie obrazu
 Przetwarzanie obrazu Przekształcenia kontekstowe Liniowe Nieliniowe - filtry Przekształcenia kontekstowe dokonują transformacji poziomów jasności pikseli analizując za każdym razem nie tylko jasność danego
Przetwarzanie obrazu Przekształcenia kontekstowe Liniowe Nieliniowe - filtry Przekształcenia kontekstowe dokonują transformacji poziomów jasności pikseli analizując za każdym razem nie tylko jasność danego
Zygmunt Wróbel i Robert Koprowski. Praktyka przetwarzania obrazów w programie Matlab
 Zygmunt Wróbel i Robert Koprowski Praktyka przetwarzania obrazów w programie Matlab EXIT 2004 Wstęp 7 CZĘŚĆ I 9 OBRAZ ORAZ JEGO DYSKRETNA STRUKTURA 9 1. Obraz w programie Matlab 11 1.1. Reprezentacja obrazu
Zygmunt Wróbel i Robert Koprowski Praktyka przetwarzania obrazów w programie Matlab EXIT 2004 Wstęp 7 CZĘŚĆ I 9 OBRAZ ORAZ JEGO DYSKRETNA STRUKTURA 9 1. Obraz w programie Matlab 11 1.1. Reprezentacja obrazu
METOdA ROzPOzNAWANiA PRzESzkód PRzEz. jednej kamery
 PRACE instytutu LOTNiCTWA 216, s. 5-16, Warszawa 2011 METOdA ROzPOzNAWANiA PRzESzkód PRzEz bezzałogowy STATEk POWiETRzNY z WYkORzYSTANiEM jednej kamery LeSzek AmbrozIAk*, JAkub CIeśLuk*, zdzisław GoSIeWSkI**
PRACE instytutu LOTNiCTWA 216, s. 5-16, Warszawa 2011 METOdA ROzPOzNAWANiA PRzESzkód PRzEz bezzałogowy STATEk POWiETRzNY z WYkORzYSTANiEM jednej kamery LeSzek AmbrozIAk*, JAkub CIeśLuk*, zdzisław GoSIeWSkI**
Kompresja video (MPEG)
") mgr inż. Grzegorz Kraszewski SYSTEMY MULTIMEDIALNE wykład 8, strona 1. Kompresja video (MEG) Zasadniczy schemat kompresora video Typy ramek przy kompresji czasowej Analiza ramek przez syntezę Sposób detekcji
mgr inż. Grzegorz Kraszewski SYSTEMY MULTIMEDIALNE wykład 8, strona 1. Kompresja video (MEG) Zasadniczy schemat kompresora video Typy ramek przy kompresji czasowej Analiza ramek przez syntezę Sposób detekcji
Wybrane metody przybliżonego. wyznaczania rozwiązań (pierwiastków) równań nieliniowych
 równań nieliniowych") Wykład trzeci 1 Wybrane metody przybliżonego wyznaczania rozwiązań pierwiastków równań nieliniowych 2 Metody rozwiązywania równań nieliniowych = 0 jest unkcją rzeczywistą zmiennej rzeczywistej Rozwiązanie
Wykład trzeci 1 Wybrane metody przybliżonego wyznaczania rozwiązań pierwiastków równań nieliniowych 2 Metody rozwiązywania równań nieliniowych = 0 jest unkcją rzeczywistą zmiennej rzeczywistej Rozwiązanie
[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]
![[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]](/thumbs/72/67682252.jpg "[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]") Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
1 Funkcje dwóch zmiennych podstawowe pojęcia
 1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
1 Funkcje dwóch zmiennych podstawowe pojęcia Definicja 1 Funkcją dwóch zmiennych określoną na zbiorze A R 2 o wartościach w zbiorze R nazywamy przyporządkowanie każdemu punktowi ze zbioru A dokładnie jednej
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne.
 Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wykład Matematyka A, I rok, egzamin ustny w sem. letnim r. ak. 2002/2003. Każdy zdający losuje jedno pytanie teoretyczne i jedno praktyczne. pytania teoretyczne:. Co to znaczy, że wektory v, v 2 i v 3
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa. P. F. Góra
 Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Funkcje wielu zmiennych
 Funkcje wielu zmiennych Wykresy i warstwice funkcji wielu zmiennych. Granice i ciagłość funkcji wielu zmiennych. Pochodne czastkowe funkcji wielu zmiennych. Gradient. Pochodna kierunkowa. Różniczka zupełna.
Funkcje wielu zmiennych Wykresy i warstwice funkcji wielu zmiennych. Granice i ciagłość funkcji wielu zmiennych. Pochodne czastkowe funkcji wielu zmiennych. Gradient. Pochodna kierunkowa. Różniczka zupełna.
Aerodynamika I. wykład 2: 2: Skośne fale uderzeniowe iifale rozrzedzeniowe. POLITECHNIKA WARSZAWSKA - wydz. Mechaniczny Energetyki i Lotnictwa
 Aerodynamika I Skośne fale uderzeniowe i fale rozrzedzeniowe naddźwiękowy przepływ w kanale dla M = 2 (rozkład liczby Macha) 19 maja 2014 Linie Macha Do tej pory, rozważaliśmy problemy dynamiki gazu, które
Aerodynamika I Skośne fale uderzeniowe i fale rozrzedzeniowe naddźwiękowy przepływ w kanale dla M = 2 (rozkład liczby Macha) 19 maja 2014 Linie Macha Do tej pory, rozważaliśmy problemy dynamiki gazu, które
BIBLIOTEKA PROGRAMU R - BIOPS. Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat
 BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
BIBLIOTEKA PROGRAMU R - BIOPS Narzędzia Informatyczne w Badaniach Naukowych Katarzyna Bernat Biblioteka biops zawiera funkcje do analizy i przetwarzania obrazów. Operacje geometryczne (obrót, przesunięcie,
Tra r n a s n fo f rm r a m c a ja a na n p a rę r ż ę eń e pomi m ę i d ę zy y uk u ł k a ł d a am a i m i obr b ó r cony n m y i m
 Wytrzymałość materiałów Naprężenia główne na przykładzie płaskiego stanu naprężeń 1 Tensor naprężeń Naprężenia w stanie przestrzennym: τ τxz τ yx τ yz τzx τzy zz Układ współrzędnych jest zwykle wybrany
Wytrzymałość materiałów Naprężenia główne na przykładzie płaskiego stanu naprężeń 1 Tensor naprężeń Naprężenia w stanie przestrzennym: τ τxz τ yx τ yz τzx τzy zz Układ współrzędnych jest zwykle wybrany
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ
 METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
METODY MATEMATYCZNE I STATYSTYCZNE W INŻYNIERII CHEMICZNEJ Wykład 3 Elementy analizy pól skalarnych, wektorowych i tensorowych Prof. Antoni Kozioł, Wydział Chemiczny Politechniki Wrocławskiej 1 Analiza
Zasady dynamiki Newtona
 Zasady dynamiki Newtona Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone nie zmuszają ciała do zmiany tego stanu Jeżeli na ciało nie działa
Zasady dynamiki Newtona Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone nie zmuszają ciała do zmiany tego stanu Jeżeli na ciało nie działa
Całki krzywoliniowe skierowane
 Całki krzywoliniowe skierowane Zamiana całki krzywoliniowej skierowanej na całkę pojedyńcza. Twierdzenie Greena. Zastosowania całki krzywoliniowej skierowanej. Małgorzata Wyrwas Katedra Matematyki Wydział
Całki krzywoliniowe skierowane Zamiana całki krzywoliniowej skierowanej na całkę pojedyńcza. Twierdzenie Greena. Zastosowania całki krzywoliniowej skierowanej. Małgorzata Wyrwas Katedra Matematyki Wydział
Kalibracja kamery. Kalibracja kamery
 Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
Cel kalibracji Celem kalibracji jest wyznaczenie parametrów określających zaleŝności między układem podstawowym a układem związanym z kamerą, które występują łącznie z transformacją perspektywy oraz parametrów
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
edzi (local edge detectors) Lokalne operatory wykrywania kraw
 Lokalne operatory wykrywania kraw") Lokalne operatory wykrywania kraw edzi (local edge detectors) Jeśli dwie reprezentacje sa zbyt odleg le, by można by lo latwo określić transformacje miedzy nimi, to u latwić zadanie można przez wprowadzenie
Lokalne operatory wykrywania kraw edzi (local edge detectors) Jeśli dwie reprezentacje sa zbyt odleg le, by można by lo latwo określić transformacje miedzy nimi, to u latwić zadanie można przez wprowadzenie
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU
 ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU Algorytmy śledzenia ruchu obiektów dr inż. Jacek Naruniec Wprowadzenie Śledzenie ruchu Śledzenie punktu Metody deterministyczne Metody statystyczne (Kalman, filtry
ANALIZA SEMANTYCZNA OBRAZU I DŹWIĘKU Algorytmy śledzenia ruchu obiektów dr inż. Jacek Naruniec Wprowadzenie Śledzenie ruchu Śledzenie punktu Metody deterministyczne Metody statystyczne (Kalman, filtry
Optymalizacja ciągła
 Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
Optymalizacja ciągła 4. Metody kierunków poprawy (metoda spadku wzdłuż gradientu) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 21.03.2019 1 / 41 Plan wykładu Minimalizacja
ROZWIĄZYWANIE RÓWNAŃ NIELINIOWYCH
 Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Transport, studia I stopnia Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać ogólna równania nieliniowego Często występującym, ważnym problemem obliczeniowym
Zastosowanie techniki Motion Capture
 Zastosowanie techniki Motion Capture Michał Grędziak mgredzia@mion.elka.pw.edu.pl Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska ul. Nowowiejska 15/19 00-665 Warszawa, Polska 13 czerwca
Zastosowanie techniki Motion Capture Michał Grędziak mgredzia@mion.elka.pw.edu.pl Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska ul. Nowowiejska 15/19 00-665 Warszawa, Polska 13 czerwca
Filtracja splotowa obrazu
 Informatyka, S1 sem. letni, 2012/2013, wykład#3 Filtracja splotowa obrazu dr inż. Paweł Forczmański Katedra Systemów Multimedialnych, Wydział Informatyki ZUT 1 / 53 Proces przetwarzania obrazów Obraz f(x,y)
Informatyka, S1 sem. letni, 2012/2013, wykład#3 Filtracja splotowa obrazu dr inż. Paweł Forczmański Katedra Systemów Multimedialnych, Wydział Informatyki ZUT 1 / 53 Proces przetwarzania obrazów Obraz f(x,y)
Analiza wektorowa. Teoria pola.
 Analiza wektorowa. Teoria pola. Pole skalarne Pole wektorowe ϕ = ϕ(x, y, z) A = A x (x, y, z) i x + A y (x, y, z) i y + A z (x, y, z) i z Gradient grad ϕ = ϕ x i x + ϕ y i y + ϕ z i z Jeśli przemieścimy
Analiza wektorowa. Teoria pola. Pole skalarne Pole wektorowe ϕ = ϕ(x, y, z) A = A x (x, y, z) i x + A y (x, y, z) i y + A z (x, y, z) i z Gradient grad ϕ = ϕ x i x + ϕ y i y + ϕ z i z Jeśli przemieścimy
MECHANIKA II. Praca i energia punktu materialnego
 MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
MECHANIKA II. Praca i energia punktu materialnego Daniel Lewandowski Politechnika Wrocławska, Wydział Mechaniczny, Katedra Mechaniki i Inżynierii Materiałowej http://kmim.wm.pwr.edu.pl/lewandowski/ daniel.lewandowski@pwr.edu.pl
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO. dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury
 KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
KINEMATYKA I DYNAMIKA CIAŁA STAŁEGO dr inż. Janusz Zachwieja wykład opracowany na podstawie literatury Funkcje wektorowe Jeśli wektor a jest określony dla parametru t (t należy do przedziału t (, t k )
Zasady dynamiki Newtona. Ilość ruchu, stan ruchu danego ciała opisuje pęd
 Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
Zasady dynamiki Newtona Ilość ruchu, stan ruchu danego ciała opisuje pęd Zasady dynamiki Newtona I Każde ciało trwa w stanie spoczynku lub porusza się ruchem prostoliniowym i jednostajnym, jeśli siły przyłożone
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 24 czerwca 2019 roku
 Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Wykład 2. Kinematyka. Podstawowe wielkości opisujące ruch. W tekście tym przedstawię podstawowe pojecia niezbędne do opiosu ruchu:
 Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Wykład 2. Kinematyka. Aby prześledzić tok tego wykładu MUSISZ rozumieć pojęcie wektora, jego składowych w układzie kartezjańskim oraz w trakcie wykładu zrozumieć intuicyjnie pojęcie pochodnej funkcji jednej
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, Spis treści
 Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Teoria obwodów / Stanisław Osowski, Krzysztof Siwek, Michał Śmiałek. wyd. 2. Warszawa, 2013 Spis treści Słowo wstępne 8 Wymagania egzaminacyjne 9 Wykaz symboli graficznych 10 Lekcja 1. Podstawowe prawa
Estymacja wektora stanu w prostym układzie elektroenergetycznym
 Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Mechanika ogólna. Kinematyka. Równania ruchu punktu materialnego. Podstawowe pojęcia. Równanie ruchu po torze (równanie drogi)
") Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Kinematyka Mechanika ogólna Wykład nr 7 Elementy kinematyki Dział mechaniki zajmujący się matematycznym opisem układów mechanicznych oraz badaniem geometrycznych właściwości ich ruchu, bez wnikania w związek
Akwizycja i przetwarzanie sygnałów cyfrowych
 Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Analiza czas - częstotliwość analiza częstotliwościowa: problem dla sygnału niestacjonarnego zwykła transformata
Akwizycja i przetwarzanie sygnałów cyfrowych Instytut Teleinformatyki ITI PK Kraków 21 luty 2011 Analiza czas - częstotliwość analiza częstotliwościowa: problem dla sygnału niestacjonarnego zwykła transformata
O ruchu. 10 m. Założenia kinematyki. Najprostsza obserwowana zmiana. Opis w kategoriach przestrzeni i czasu ( geometria fizyki ).
.") O ruchu Założenia kinematyki Najprostsza obserwowana zmiana. Ignorujemy czynniki sprawcze ruchu, rozmiar, kształt, strukturę ciała (punkt materialny). Opis w kategoriach przestrzeni i czasu ( geometria
O ruchu Założenia kinematyki Najprostsza obserwowana zmiana. Ignorujemy czynniki sprawcze ruchu, rozmiar, kształt, strukturę ciała (punkt materialny). Opis w kategoriach przestrzeni i czasu ( geometria
Obliczenia Naukowe. Wykład 12: Zagadnienia na egzamin. Bartek Wilczyński
 Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Równania ruchu Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada
Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Równania ruchu Więzy Rozwiazywanie równań ruchu oscylator harminiczny, wahadło ruch w jednorodnym polu elektrycznym i magnetycznym spektroskop III zasada
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transform
 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. March 20, 2013 Dyskretne układy liniowe. Funkcja splotu. Równania różnicowe. Transformata Z. Sygnał i system Sygnał jest opisem
Rachunek różniczkowy funkcji dwóch zmiennych
 Rachunek różniczkowy funkcji dwóch zmiennych Definicja Spis treści: Wykres Ciągłość, granica iterowana i podwójna Pochodne cząstkowe Różniczka zupełna Gradient Pochodna kierunkowa Twierdzenie Schwarza
Rachunek różniczkowy funkcji dwóch zmiennych Definicja Spis treści: Wykres Ciągłość, granica iterowana i podwójna Pochodne cząstkowe Różniczka zupełna Gradient Pochodna kierunkowa Twierdzenie Schwarza
MIKROSKOPIA OPTYCZNA 19.05.2014 AUTOFOCUS TOMASZ POŹNIAK MATEUSZ GRZONDKO
 MIKROSKOPIA OPTYCZNA 19.05.2014 AUTOFOCUS TOMASZ POŹNIAK MATEUSZ GRZONDKO AUTOFOCUS (AF) system automatycznego ustawiania ostrości w aparatach fotograficznych Aktywny - wysyła w kierunku obiektu światło
MIKROSKOPIA OPTYCZNA 19.05.2014 AUTOFOCUS TOMASZ POŹNIAK MATEUSZ GRZONDKO AUTOFOCUS (AF) system automatycznego ustawiania ostrości w aparatach fotograficznych Aktywny - wysyła w kierunku obiektu światło
27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE
 27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE 27.1. Wiadomości wstępne Równaniem różniczkowym cząstkowym nazywamy związek w którym występuje funkcja niewiadoma u dwóch lub większej liczby zmiennych niezależnych i
27. RÓWNANIA RÓŻNICZKOWE CZĄSTKOWE 27.1. Wiadomości wstępne Równaniem różniczkowym cząstkowym nazywamy związek w którym występuje funkcja niewiadoma u dwóch lub większej liczby zmiennych niezależnych i
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 26 czerwca 2017 roku
 Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Transformacje obiektów 3D
 Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
Synteza i obróbka obrazu Transformacje obiektów 3D Opracowanie: dr inż. Grzegorz Szwoch Politechnika Gdańska Katedra Systemów Multimedialnych Lokalny układ współrzędnych Tworząc model obiektu, zapisujemy
Całki krzywoliniowe wiadomości wstępne
 Całki krzywoliniowe wiadomości wstępne Łuk na płaszczyźnie to zbiór punktów (x, y o współrzędnych x = x(t, y = y(t, gdzie (x(t, y(t są funkcjami ciągłymi określonymi na przedziale bez punktów wielokrotnych.
Całki krzywoliniowe wiadomości wstępne Łuk na płaszczyźnie to zbiór punktów (x, y o współrzędnych x = x(t, y = y(t, gdzie (x(t, y(t są funkcjami ciągłymi określonymi na przedziale bez punktów wielokrotnych.
Fizyka 1 Wróbel Wojciech. w poprzednim odcinku
 w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
w poprzednim odcinku 1 Opis ruchu Opis ruchu Tor, równanie toru Zależność od czasu wielkości wektorowych: położenie przemieszczenie prędkość przyśpieszenie UWAGA! Ważne żeby zaznaczać w jakim układzie
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 6 Rozwiązywanie równań nieliniowych Rozwiązaniem lub pierwiastkiem równania f(x) = 0 lub g(x) = h(x)
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 9 AiR III
 1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
1 Na podstawie materiałów autorstwa dra inż. Marka Wnuka. Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 12 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Wektory, układ współrzędnych
 Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Wektory, układ współrzędnych Wielkości występujące w przyrodzie możemy podzielić na: Skalarne, to jest takie wielkości, które potrafimy opisać przy pomocy jednej liczby (skalara), np. masa, czy temperatura.
Kinematyka płynów - zadania
 Zadanie 1 Zadane jest prawo ruchu w zmiennych Lagrange a x = Xe y = Ye t 0 gdzie, X, Y oznaczają współrzędne materialne dla t = 0. Wyznaczyć opis ruchu w zmiennych Eulera. Znaleźć linię prądu. Pokazać,
Zadanie 1 Zadane jest prawo ruchu w zmiennych Lagrange a x = Xe y = Ye t 0 gdzie, X, Y oznaczają współrzędne materialne dla t = 0. Wyznaczyć opis ruchu w zmiennych Eulera. Znaleźć linię prądu. Pokazać,
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Sphere tracing: integracja z klasycznymi metodami symulacji i renderingu
 Sphere tracing: integracja z klasycznymi metodami symulacji i renderingu IGK 2012 Michał Jarząbek W skrócie Funkcje niejawne opisują powierzchnie niejawne Powierzchnie niejawne metoda reprezentacji "obiektów"
Sphere tracing: integracja z klasycznymi metodami symulacji i renderingu IGK 2012 Michał Jarząbek W skrócie Funkcje niejawne opisują powierzchnie niejawne Powierzchnie niejawne metoda reprezentacji "obiektów"
Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr 1
 Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr 1 Tomasz Chwiej 6 czerwca 2016 1 Równania różniczkowe zwyczajne Zastosowanie szeregu Taylora do konstrukcji ilorazów różnicowych: iloraz
Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr 1 Tomasz Chwiej 6 czerwca 2016 1 Równania różniczkowe zwyczajne Zastosowanie szeregu Taylora do konstrukcji ilorazów różnicowych: iloraz
Metody przybliżonego rozwiązywania równań różniczkowych zwyczajnych
 Metody przybliżonego rozwiązywania równań różniczkowych zwyczajnych Rozwiązywanie równań różniczkowych zwyczajnych za pomocą szeregów metody dyskretne Metoda współczynników nieoznaczonych Metoda kolejnego
Metody przybliżonego rozwiązywania równań różniczkowych zwyczajnych Rozwiązywanie równań różniczkowych zwyczajnych za pomocą szeregów metody dyskretne Metoda współczynników nieoznaczonych Metoda kolejnego
Geometria. Rozwiązania niektórych zadań z listy 2
 Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
Geometria. Rozwiązania niektórych zadań z listy 2 Inne rozwiązanie zadania 2. (Wyznaczyć równanie stycznej do elipsy x 2 a 2 + y2 b 2 = 1 w dowolnym jej punkcie (x 0, y 0 ). ) Przypuśćmy, że krzywa na
Wykład 6: Reprezentacja informacji w układzie optycznym; układy liniowe w optyce; podstawy teorii dyfrakcji
 Fotonika Wykład 6: Reprezentacja informacji w układzie optycznym; układy liniowe w optyce; podstawy teorii dyfrakcji Plan: pojęcie sygnału w optyce układy liniowe filtry liniowe, transformata Fouriera,
Fotonika Wykład 6: Reprezentacja informacji w układzie optycznym; układy liniowe w optyce; podstawy teorii dyfrakcji Plan: pojęcie sygnału w optyce układy liniowe filtry liniowe, transformata Fouriera,
Implementacja filtru Canny ego
 ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
ANALIZA I PRZETWARZANIE OBRAZÓW Implementacja filtru Canny ego Autor: Katarzyna Piotrowicz Kraków,2015-06-11 Spis treści 1. Wstęp... 1 2. Implementacja... 2 3. Przykłady... 3 Porównanie wykrytych krawędzi
Rozpoznawanie Twarzy i Systemy Biometryczne
 Filtry Plan wykładu Przegląd dostępnych filtrów Zastosowanie filtrów na różnych etapach pracy systemu Dalsze badania Kontrast i ostrość Kontrast różnica w kolorze i świetle między częściami ś i obrazu
Filtry Plan wykładu Przegląd dostępnych filtrów Zastosowanie filtrów na różnych etapach pracy systemu Dalsze badania Kontrast i ostrość Kontrast różnica w kolorze i świetle między częściami ś i obrazu
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska. Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni
 Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Wydział Inżynierii Środowiska; kierunek Inż. Środowiska Lista 2. do kursu Fizyka. Rok. ak. 2012/13 sem. letni Tabele wzorów matematycznych i fizycznych oraz obszerniejsze listy zadań do kursu są dostępne
Narzędzia matematyczne zastosowane w systemie biomonitoringu wody
 Narzędzia matematyczne zastosowane w systemie biomonitoringu wody Piotr Przymus Krzysztof Rykaczewski Wydział Matematyki i Informatyki Uniwersytet Mikołaja Kopernika Toruń 1 of 24 18 marca 2009 Cel referatu
Narzędzia matematyczne zastosowane w systemie biomonitoringu wody Piotr Przymus Krzysztof Rykaczewski Wydział Matematyki i Informatyki Uniwersytet Mikołaja Kopernika Toruń 1 of 24 18 marca 2009 Cel referatu
Elementy dynamiki klasycznej - wprowadzenie. dr inż. Romuald Kędzierski
 Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Elementy dynamiki klasycznej - wprowadzenie dr inż. Romuald Kędzierski Po czym można rozpoznać, że na ciało działają siły? Możliwe skutki działania sił: Po skutkach działania sił. - zmiana kierunku ruchu
Podstawy elektromagnetyzmu. Wykład 1. Rachunek wektorowy
 Podstawy elektromagnetyzmu Wykład 1 Rachunek wektorowy Co to jest,,pole? Matematyka: odwzorowanie Rn Rm które przypisuje każdemu punktowi wartość (skalarną lub wektorową). Fizyka: Własność przestrzeni
Podstawy elektromagnetyzmu Wykład 1 Rachunek wektorowy Co to jest,,pole? Matematyka: odwzorowanie Rn Rm które przypisuje każdemu punktowi wartość (skalarną lub wektorową). Fizyka: Własność przestrzeni
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy prosty i skuteczny.
 Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Filtracja nieliniowa może być bardzo skuteczną metodą polepszania jakości obrazów Filtry nieliniowe Filtr medianowy Spośród licznych filtrów nieliniowych najlepszymi właściwościami odznacza się filtr medianowy
Modyfikacja schematu SCPF obliczeń energii polaryzacji
 Modyfikacja schematu SCPF obliczeń energii polaryzacji Zakład Metod Obliczeniowych Chemii 11 kwietnia 2006 roku 1 Po co? Jak? 2 Algorytm Analiza zbieżności 3 dla układów symetrycznych 4 Fulleren 5 Po co?
Modyfikacja schematu SCPF obliczeń energii polaryzacji Zakład Metod Obliczeniowych Chemii 11 kwietnia 2006 roku 1 Po co? Jak? 2 Algorytm Analiza zbieżności 3 dla układów symetrycznych 4 Fulleren 5 Po co?
Teoria sterowania - studia niestacjonarne AiR 2 stopień
 Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Teoria sterowania - studia niestacjonarne AiR stopień Kazimierz Duzinkiewicz, dr hab. Inż. Katedra Inżynerii Systemów Sterowania Wykład 4-06/07 Transmitancja widmowa i charakterystyki częstotliwościowe
Lokalna odwracalność odwzorowań, odwzorowania uwikłane
 Lokalna odwracalność odwzorowań, odwzorowania uwikłane Katedra Matematyki i Ekonomii Matematycznej Szkoła Główna Handlowa 17 maja 2012 Definicja Mówimy, że odwzorowanie F : X R n, gdzie X R n, jest lokalnie
Lokalna odwracalność odwzorowań, odwzorowania uwikłane Katedra Matematyki i Ekonomii Matematycznej Szkoła Główna Handlowa 17 maja 2012 Definicja Mówimy, że odwzorowanie F : X R n, gdzie X R n, jest lokalnie
Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr zimowy 2017/2018
 Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr zimowy 2017/2018 Tomasz Chwiej 22 stycznia 2019 1 Równania różniczkowe zwyczajne Zastosowanie szeregu Taylora do konstrukcji ilorazów
Zagdanienia do egzaminu z Inżynierskich Metod Numerycznych - semestr zimowy 2017/2018 Tomasz Chwiej 22 stycznia 2019 1 Równania różniczkowe zwyczajne Zastosowanie szeregu Taylora do konstrukcji ilorazów