Narzędzia matematyczne zastosowane w systemie biomonitoringu wody
|
|
|
- Mieczysław Kuczyński
- 10 lat temu
- Przeglądów:
Transkrypt

1 Narzędzia matematyczne zastosowane w systemie biomonitoringu wody Piotr Przymus Krzysztof Rykaczewski Wydział Matematyki i Informatyki Uniwersytet Mikołaja Kopernika Toruń 1 of marca 2009

2 Cel referatu Referat dotyczy biomonitoringu wody oraz zastosowania metod matematycznych w tym temacie. Naszym celem jest nie tylko przedstawienie metod przez nas zastosowanych oraz tych, które chcemy zastosować, ale też wysłuchanie waszych opinii oraz pomysłów. 2 of 24

3 Pierwsze kroki Analiza wzrostów i spadków Uznaliśmy, że na początek ciekawe będzie przeanalizowanie wykresów (sygnałów) pod kątem pojawiających się charakterystycznych wzlotów i spadków. W tym celu musieliśmy najpierw wygładzić podstawowy wykres oraz policzyć pochodną. Wygładzanie Zastosowaliśmy technikę spline ów kubicznych. Mówiąc potocznie, interpolowaliśmy wykres kawałkami wielomianami stopnia co najwyżej 3, które łączą się w sposób gładki. 3 of 24

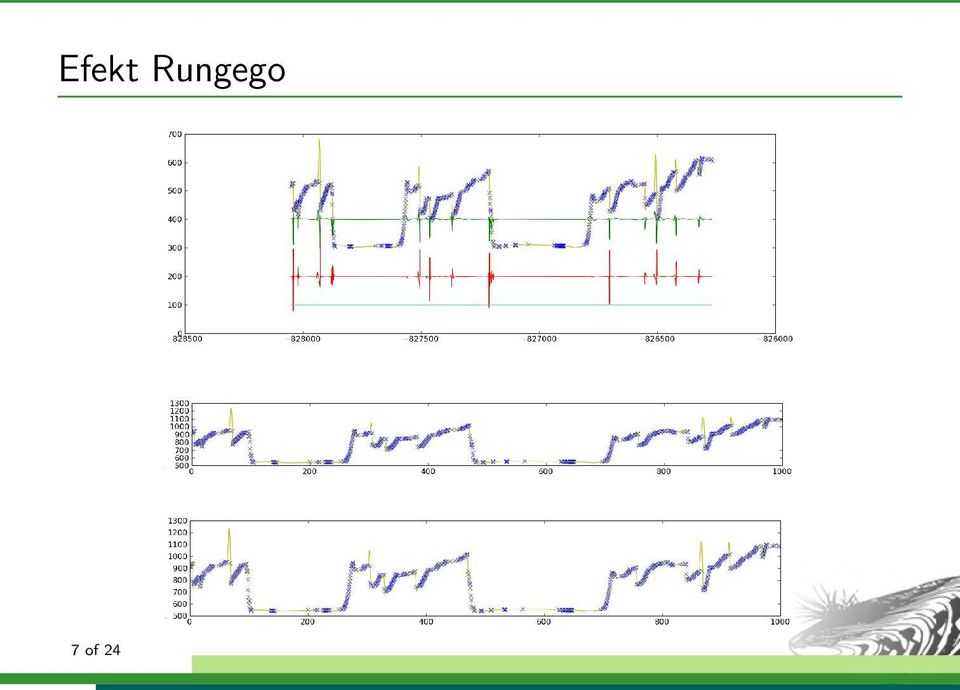
4 Funkcje sklejane - Spliny Aproksymacja na wielu węzłach wymusza stosowanie wielomianu interpolacyjnego wysokiego stopnia. Szczególnie przy równoodległych węzłach prowadzi to do oscylacji wielomianu na końcach przedziału interpolacji. Jest to tak zwany Efekt Rungego. Zadanie interpolacji wielomianem wysokiego stopnia jest dodatkowo wrażliwe na zaburzenie danych (jest źle uwarunkowane numerycznie). Z tych powodów warto stosować interpolację lokalną niższego stopnia - funkcje sklejane. Funkcje sklejane są realizacją idei gładkiej interpolacji lokalnej wielomianem niskiego stopnia z gładkim połączeniem (sklejeniem) poszczególnych wielomianów lokalnych. 4 of 24

5 Cubic Spline Równania opisujące spliny możemy uzyskać z narzucenia ciągłości pierwszej i drugiej pochodnej w punkcie sklejenia wielomianów. W ten sposób uzyskujemy wygładzenie przebiegu interpolującego. Dla splinu trzeciego stopnia w każdym z N 1 przedziałów między sąsiednimi węzłami mamy: S i (x) = a i x 3 + b i x 2 + c i x + d i, i = 1,..., N 1. Podstawowy warunek interpolacji daje następujące równania dla każdego splinu: S i (x i ) = y i, i = 1,..., N, S i (x i+1 ) = y i, i = 1,..., N, (1) Pozostałe warunki uzyskamy z przyrównania pierwszych i drugich pochodnych w połączeniach: S i (x i ) = S i 1(x i ), i = 2,..., N, S i (x i ) = S i 1(x i ), i = 2,..., N, (2) Układ powyższych 4(N 1) równań tworzy macierz trojprzekątniową, którą można efektywnie rozwiązać metodami eliminacji. 5 of 24
 = y i, i = 1,..., N, S i (x i+1 ) = y i, i = 1,.")
6 Spliny i ich pochodne 6 of 24

7 Efekt Rungego 7 of 24
8 Filtry Filtr liniowy Filtr liniowy (Wienera) służy do liniowej estymacji poprzez liniową operację na dostępnych danych. Estymacja jest optymalna w sensie błędu średniokwadratowego. Filtr adaptacyjny Filtrem adaptacyjnym nazywamy filtr, w którym dynamicznie zmienia się funkcja przejścia, w taki sposób, aby zoptymalizować algorytm. Ogólnie rzecz ujmując, proces adaptacyjny zakłada użycie pewne ustalonej funkcji kosztu (np. średniej odchylenia kwadratowego, minimalizacja składowej szumu), która jest kryterium optymalności zachowanie się filtru, i która wpływa na współczynniki. 8 of 24

9 Sformułowania problemu Przedmiotem naszych rozważań będzie filtr transwerslany, który zawiera N 1 elementów opóźniających. Przez u(n) oznaczamy bieżącą wartość sygnału wejściowego, natomiast próbki u(n 1),..., u(n N + 1) reprezentują poprzednie wartości sygnału wejściowego, które zostają zapamiętane w układzie. Wejścia są mnożone odpoweidnio przez odpowiadające im wagi h 1,..., h N. W wyniku sumowania poszczególnych iloczynów h k u(n k + 1), k = 1,..., N, otrzymujemy sygnał wyjściowy filtru dany wzorem N ŷ(n) = h k u(n k + 1) = h T u(n), (3) k=1 gdzie h T = [h 1,..., h N ] oraz u T (n) = [u(n),..., u(n N + 1)]. 9 of 24
, k = 1,.")
10 Filtry Wady filtrów Niestety filtry mają pewne wady, np: 1. stały rząd, 2. inne 10 of 24

11 Pochodna a filtry Okazuje się, że pochodna liczona na przedziałach o równych odstępach to nic innego jak bardzo prosty filtr ŷ(i) = y(t i+1) y(t i ) 1 ( = y(ti+1 ) y(t t i+1 t i t i+1 i ) ). (4) t i 11 of 24
 y(t t i+1 t i t i+1 i ) ).")
12 Pierwszy filtr 12 of 24

13 Filtr Wienera i wstęp do metod adaptacyjnych Wyjście filtru ŷ(n) porównujemy z sygnałem wzorcowym ɛ(n) = d(n) ŷ(n). (5) Zacznijmy od zdefiniowania funkcji kosztu wzorem C (n) = E { ɛ(n) 2}, (6) gdzie E {.} oznacza wartość oczekiwaną. 13 of 24
 2}, (6) gdzie E {.} oznacza wartość oczekiwaną.")
14 Metody adaptacyjne LMS (Least Mean Squares Algorithm) Algorytm najszybszego spadku umożliwia iteracyjne rozwiązanie równań normalnych. Jego zastosowanie wymaga znajomości macierzy autokorelacji R oraz wektora korelacji wzajemnej p. Jednakże w praktyce ani macierz R, ani wektor p nie są znane. Zastępujemy więc te nieznane wielkości ich obserwacjami. W efekcie algorytm gradientu stochastycznego znany jest pod nazwą algorytmu LMS [ ] ĥ(n + 1) = ĥ(n) µ d(n) u T ĥ(n) (7) RLS (Recursive Least Squares Algorithm) 14 of 24
 = ĥ(n) µ d(n) u T ĥ(n) (7) RLS")
15 LMS Główną metodą jaka stoi za filtrem LMS jest metoda gradientu prostego, ażeby znaleźć wektor h(n), który minimalizuje funkcję kosztu. Funkcja kosztu jest dla nas średnia kwadratowa. Stosując metodę gradientu prostego do pochodnych częściowych do współrzędnych wektora współczynników filtru { } { C (n) = E e(n) e T (n) = 2E ( e(n) ) } e T (n) (8) gdzie jest operatorem pochodnej. 15 of 24
 = E e(n) e T (n) = 2E ( e(n) ) } e T (n) (8) gdzie jest")
16 LMS c.d. Oznaczając x(n) = [x(n), x(n 1),..., x(n p + 1)] T oraz e(n) = x(n) otrzymujemy { } C (n) = 2E x(n) e T (n) (9) Wektor C (n) jest wektorem, który wskazuje kierunek przeciwny do wzrostu funkcji kosztu. Żeby znaleźć minimum musimy poruszać się w kierunku przeciwnym do kierunku C (n). Mamy więc równanie ĥ(n + 1) = ĥ(n) µ { } C (n) = ĥ(n) + µ E x(n) e T (n), (10) 2 gdzie µ 2 jest wielkością kroku. Uwaga. Do zrealizowania algorytmu potrzebna jest znajomość E {x(n) e (n)}. W tym celu trzeba zastosować inne metody aproksymacyjne. 16 of 24
 = ĥ(n) µ { } C (n) = ĥ(n) + µ E x(n) e T (n), (10) 2 gdzie µ 2 jest wielkością kroku. Uwaga.")
17 Uwagi o LMS jest dość prosty z uwagi na złożoność obliczeniową; liczba potrzebnych operacji jest proporcjonalna do N największa wadą jest czułość na rozrzut wartości własnych macierzy autokorelacji R = E (u(n)u T (n)) 17 of 24

18 Algorytm RLS Załóżmy, że sygnał d może być przedstawiony w następującej postaci x(n) = q k=0 b n (k)d(n k) + v(n) (11) gdzie v(n) oznacza szum. Chcemy wydobyć sygnał stosując metodę filtr FIR, w: ˆd(n) = y(n) = w T n x(n) (12) Naszym celem jest oszacowanie parametrów filru w, za każdym razem odwołując się do nowej oszacowanej wartości w n. Jednakże w dalszych etapach chcielibyśmy uniknąć liczenia metoda najmniejszych kwadratów czynnik w n+1 w zależności od w n. 18 of 24

19 Uwagi o RLS jest trudniejszy do implementacji jest niewrażliwy na rozrzut wartości własnych macierzy autokorelacji R nie trzeba liczyć odwrotności macierzy autokorelacji, dzięki czemu oszczędzamy czas można go łatwiej związać z innymi filtrami, np. filtrem Kalmana 19 of 24

20 Falki (wavelets) - idea Definicja Falki to rodzina funkcji, z których każda definiowana jest poprzez podanie dylatycji a (która kontroluje parametr skalowania) oraz przesunięcia b (które kontroluje położenie funkcji) z funkcji nazywanej mother wavelet ψ. Mają one na koncie wiele sukcesów jako narzędzie do analizy sygnałów, odszumianiu, kompresji danych itp. Przy pomocy falek każda funkcja f L 2 (R) może być zapisana jako kombinacja f (t) = a i,j φ i,j (t ka) (13) i,j Przy odpowiednich założeniach możemy też odwrócić tą operację i z wartości sygnału f można odzyskać początkową funkcję. 20 of 24
 może być zapisana jako kombinacja f (t) = a i,j φ i,j (t ka) (13) i,j Przy odpowiednich założeniach możemy")
21 Falki 21 of 24
22 Falki i sieci neuronowe Mając dany n-elementowy zbiór treningowy, wyjściowa odpowiedź układu dana jest wzorem N p ( x ti ŷ(w) = w 0 + w i φ i=1 a i ), (14) gdzie N p to liczba węzłów w warstwie ukrytej, a w i to synaptyczne wagi sieci. Mając zbudowaną falkową sieć, uczymy ją stosując metody używające algorytmy metodę gradientu prostego, np. LMS, ażeby zminimalizować średni błąd kwardatowy J(w) = 1 n ( n yi ŷ(w) ) 2, (15) i=1 gdzie y i jest rzeczywistą odpowiedzią z trenowanej sieci przy wejściu w. 22 of 24
23 Cechy Podsumowanie nie ma jak dotychczas dowodu i oceny zbieżności prawdopodobnie mogą być niestabilne w pewnych sytuacjach radzą sobie lepiej niż inne sieci (np. detekcja anomalii w ruchu sieciowym) 23 of 24
24 Bibliografia Chares K. Chui, Wavelets: A mathematical tool for signal analysis,siam, Philadelphia, 1997 Jan T. Białasiewicz, Falki i aproksymacje, Wydawnictwo Naukowo Techniczne, Warszawa, 2000 Leszek Rutkowski, Filtry adaptacyjne i adaptacyjne przetwarzanie sygnałów,wydawnictwo Naukowo Techniczne, Warszawa, 1994 Zdzisław Bubnicki, Teoria i algorytmy sterowania, Wydawnictwo Naukowe PWN Fa-Long Luo, Rolf Unbehauen, Applied Neural Networks for Signal Processing, Cambridge University Press, 1999 Marc Moonen, Ian Proudler, An Introduction to Adaptive Signal Processing, Course Notes of 24
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania. Technologie informatyczne
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Interpolacja metoda funkcji sklejanych Materiały pomocnicze do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Technologie informatyczne Interpolacja metoda funkcji sklejanych Materiały pomocnicze do ćwiczeń laboratoryjnych
Praca dyplomowa magisterska
 Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
Praca dyplomowa magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA Dyplomant: Jakub Kołakowski Opiekun pracy: dr inż. Michał Meller Plan prezentacji
INTERPOLACJA I APROKSYMACJA FUNKCJI
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Wprowadzenie Na czym polega interpolacja? Interpolacja polega
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 26 czerwca 2017 roku
 Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Egzamin pisemny zestaw czerwca 0 roku Imię i nazwisko:.... ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x
Podstawy Sztucznej Inteligencji (PSZT)
") Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
Podstawy Sztucznej Inteligencji (PSZT) Paweł Wawrzyński Uczenie maszynowe Sztuczne sieci neuronowe Plan na dziś Uczenie maszynowe Problem aproksymacji funkcji Sieci neuronowe PSZT, zima 2013, wykład 12
ELEMENTY ANALIZY NUMERYCZNEJ ELEMENTY ANALIZY NUMERYCZNEJ. Egzamin pisemny zestaw 1 24 czerwca 2019 roku
 Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Egzamin pisemny zestaw. ( pkt.) Udowodnić, że jeśli funkcja g interpoluje funkcję f w węzłach x 0, x, K, x n, a funk- cja h interpoluje funkcję f w węzłach x, x, K, x n, to funkcja x0 x gx ( ) + [ gx (
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Optymalizacja ciągła 5. Metoda stochastycznego spadku wzdłuż gradientu Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 04.04.2019 1 / 20 Wprowadzenie Minimalizacja różniczkowalnej
Aproksymacja funkcji a regresja symboliczna
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(x), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(x), zwaną funkcją aproksymującą
Zał nr 4 do ZW. Dla grupy kursów zaznaczyć kurs końcowy. Liczba punktów ECTS charakterze praktycznym (P)
") Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Zał nr 4 do ZW WYDZIAŁ PODSTAWOWYCH PROBLEMÓW TECHNIKI KARTA PRZEDMIOTU Nazwa w języku polskim : Obliczenia Naukowe Nazwa w języku angielskim : Scientific Computing. Kierunek studiów : Informatyka Specjalność
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka Adaline.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka Adaline. Maja Czoków, Jarosław Piersa Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 211-1-18 1 Pomysł Przykłady Zastosowanie 2
Interpolacja. Marcin Orchel. Drugi przypadek szczególny to interpolacja trygonometryczna
 Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Interpolacja Marcin Orchel 1 Wstęp Mamy daną funkcję φ (x; a 0,..., a n ) zależną od n + 1 parametrów a 0,..., a n. Zadanie interpolacji funkcji φ polega na określeniu parametrów a i tak aby dla n + 1
Metody numeryczne Wykład 6
 Metody numeryczne Wykład 6 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Interpolacja o Interpolacja
Metody numeryczne Wykład 6 Dr inż. Michał Łanczont Instytut Elektrotechniki i Elektrotechnologii E419, tel. 4293, m.lanczont@pollub.pl, http://m.lanczont.pollub.pl Zakres wykładu Interpolacja o Interpolacja
METODY NUMERYCZNE. Wykład 3. Plan. Aproksymacja Interpolacja wielomianowa Przykłady. dr hab.inż. Katarzyna Zakrzewska, prof.agh. Met.Numer.
 METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
METODY NUMERYCZNE Wykład 3. dr hab.inż. Katarzyna Zakrzewska, prof.agh Met.Numer. wykład 3 1 Plan Aproksymacja Interpolacja wielomianowa Przykłady Met.Numer. wykład 3 2 1 Aproksymacja Metody numeryczne
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 8 Interpolacja Interpolacja polega na budowaniu tzw. funkcji interpolujących ϕ(x) na podstawie zadanych
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładu 8 Interpolacja Interpolacja polega na budowaniu tzw. funkcji interpolujących ϕ(x) na podstawie zadanych
Aproksymacja. funkcji: ,a 2. ,...,a m. - są funkcjami bazowymi m+1 wymiarowej podprzestrzeni liniowej X m+1
 Założenie: f(x) funkcja którą aproksymujemy X jest przestrzenią liniową Aproksymacja liniowa funkcji f(x) polega na wyznaczeniu współczynników a 0,a 1,a 2,...,a m funkcji: Gdzie: - są funkcjami bazowymi
Założenie: f(x) funkcja którą aproksymujemy X jest przestrzenią liniową Aproksymacja liniowa funkcji f(x) polega na wyznaczeniu współczynników a 0,a 1,a 2,...,a m funkcji: Gdzie: - są funkcjami bazowymi
Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-2)
") Jacek Złydach (JW) Wstęp Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-) Implementacja praktyczna Poniższa praktyczna implementacja stanowi uzupełnienie teoretycznych rozważań na temat interpolacji
Jacek Złydach (JW) Wstęp Interpolacja krzywymi sklejanymi stopnia drugiego (SPLINE-) Implementacja praktyczna Poniższa praktyczna implementacja stanowi uzupełnienie teoretycznych rozważań na temat interpolacji
Elementarna analiza statystyczna
 MatLab część V 1 Elementarna analiza statystyczna W standardowym pakiecie MatLab-a istnieją jedynie podstawowe funkcje analizy statystycznej. Bardziej zaawansowane znajdują się w pakiecie statystycznym
MatLab część V 1 Elementarna analiza statystyczna W standardowym pakiecie MatLab-a istnieją jedynie podstawowe funkcje analizy statystycznej. Bardziej zaawansowane znajdują się w pakiecie statystycznym
ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM. Ćwiczenie 2. Badanie algorytmów adaptacyjnych LMS i RLS
 ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM Ćwiczenie 2 Badanie algorytmów adaptacyjnych LMS i RLS 1. CEL ĆWICZENIA Celem ćwiczenia jest samodzielna implementacja przez studentów dwóch podstawowych
ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM Ćwiczenie 2 Badanie algorytmów adaptacyjnych LMS i RLS 1. CEL ĆWICZENIA Celem ćwiczenia jest samodzielna implementacja przez studentów dwóch podstawowych
[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]
![[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]](/thumbs/72/67682252.jpg "[d(i) y(i)] 2. Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) i=1. λ n i [d(i) y(i)] 2 λ (0, 1]") Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
Algorytm RLS Recursive Least Squares Ogólna postać kryterium LS: J = i e 2 (i) = i [d(i) y(i)] 2 Do wyprowadzenia algorytmu RLS posłuży kryterium autokorelacyjne: J n = e 2 (i) Zmodyfikowane kryterium
DOPASOWYWANIE KRZYWYCH
 DOPASOWYWANIE KRZYWYCH Maciej Patan Uniwersytet Zielonogórski Motywacje Przykład 1. Dane o przyroście światowej populacji są aktualizowane co każde 10 lat, celem szacowania średniego przyrostu rocznego.
DOPASOWYWANIE KRZYWYCH Maciej Patan Uniwersytet Zielonogórski Motywacje Przykład 1. Dane o przyroście światowej populacji są aktualizowane co każde 10 lat, celem szacowania średniego przyrostu rocznego.
w analizie wyników badań eksperymentalnych, w problemach modelowania zjawisk fizycznych, w analizie obserwacji statystycznych.
 Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Aproksymacja funkcji a regresja symboliczna Problem aproksymacji funkcji polega na tym, że funkcję F(), znaną lub określoną tablicą wartości, należy zastąpić inną funkcją, f(), zwaną funkcją aproksymującą
Uczenie sieci typu MLP
 Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
Uczenie sieci typu MLP Przypomnienie budowa sieci typu MLP Przypomnienie budowy neuronu Neuron ze skokową funkcją aktywacji jest zły!!! Powszechnie stosuje -> modele z sigmoidalną funkcją aktywacji - współczynnik
WYKŁAD 9 METODY ZMIENNEJ METRYKI
 WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
WYKŁAD 9 METODY ZMIENNEJ METRYKI Kierunki sprzężone. Metoda Newtona Raphsona daje dobre przybliżenie najlepszego kierunku poszukiwań, lecz jest to okupione znacznym kosztem obliczeniowym zwykle postać
Wstęp do metod numerycznych Zadania numeryczne 2016/17 1
 Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
Wstęp do metod numerycznych Zadania numeryczne /7 Warunkiem koniecznym (nie wystarczającym) uzyskania zaliczenia jest rozwiązanie co najmniej 3 z poniższych zadań, przy czym zadania oznaczone literą O
Adaptive wavelet synthesis for improving digital image processing
 for improving digital image processing Politechnika Łódzka Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej 4 listopada 2010 Plan prezentacji 1 Wstęp 2 Dyskretne przekształcenie falkowe
for improving digital image processing Politechnika Łódzka Wydział Fizyki Technicznej, Informatyki i Matematyki Stosowanej 4 listopada 2010 Plan prezentacji 1 Wstęp 2 Dyskretne przekształcenie falkowe
Adaptacyjne Przetwarzanie Sygnałów. Filtracja adaptacyjna w dziedzinie częstotliwości
 W Filtracja adaptacyjna w dziedzinie częstotliwości Blokowy algorytm LMS (BLMS) N f n+n = f n + α x n+i e(n + i), i= N L Slide e(n + i) =d(n + i) f T n x n+i (i =,,N ) Wprowadźmy nowy indeks: n = kn (
W Filtracja adaptacyjna w dziedzinie częstotliwości Blokowy algorytm LMS (BLMS) N f n+n = f n + α x n+i e(n + i), i= N L Slide e(n + i) =d(n + i) f T n x n+i (i =,,N ) Wprowadźmy nowy indeks: n = kn (
Estymacja wektora stanu w prostym układzie elektroenergetycznym
 Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Zakład Sieci i Systemów Elektroenergetycznych LABORATORIUM INFORMATYCZNE SYSTEMY WSPOMAGANIA DYSPOZYTORÓW Estymacja wektora stanu w prostym układzie elektroenergetycznym Autorzy: dr inż. Zbigniew Zdun
Sztuczna Inteligencja Tematy projektów Sieci Neuronowe
 PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
PB, 2009 2010 Sztuczna Inteligencja Tematy projektów Sieci Neuronowe Projekt 1 Stwórz projekt implementujący jednokierunkową sztuczną neuronową złożoną z neuronów typu sigmoidalnego z algorytmem uczenia
Metody numeryczne w przykładach
 Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
Metody numeryczne w przykładach Bartosz Ziemkiewicz Wydział Matematyki i Informatyki UMK, Toruń Regionalne Koło Matematyczne 8 kwietnia 2010 r. Bartosz Ziemkiewicz (WMiI UMK) Metody numeryczne w przykładach
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I
 Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Metody Numeryczne w Budowie Samolotów/Śmigłowców Wykład I dr inż. Tomasz Goetzendorf-Grabowski (tgrab@meil.pw.edu.pl) Dęblin, 11 maja 2009 1 Organizacja wykładu 5 dni x 6 h = 30 h propozycja zmiany: 6
Zaawansowane metody numeryczne
 Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
Wykład 11 Ogólna postać metody iteracyjnej Definicja 11.1. (metoda iteracyjna rozwiązywania układów równań) Metodą iteracyjną rozwiązywania { układów równań liniowych nazywamy ciąg wektorów zdefiniowany
8. Neuron z ciągłą funkcją aktywacji.
 8. Neuron z ciągłą funkcją aktywacji. W tym ćwiczeniu zapoznamy się z modelem sztucznego neuronu oraz przykładem jego wykorzystania do rozwiązywanie prostego zadania klasyfikacji. Neuron biologiczny i
8. Neuron z ciągłą funkcją aktywacji. W tym ćwiczeniu zapoznamy się z modelem sztucznego neuronu oraz przykładem jego wykorzystania do rozwiązywanie prostego zadania klasyfikacji. Neuron biologiczny i
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, Spis treści
 Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
Inżynierskie metody analizy numerycznej i planowanie eksperymentu / Ireneusz Czajka, Andrzej Gołaś. Kraków, 2017 Spis treści Od autorów 11 I. Klasyczne metody numeryczne Rozdział 1. Na początek 15 1.1.
IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ
 IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ Celem ćwiczenia jest zapoznanie się ze sposobem działania sieci neuronowych typu MLP (multi-layer perceptron) uczonych nadzorowaną (z nauczycielem,
IMPLEMENTACJA SIECI NEURONOWYCH MLP Z WALIDACJĄ KRZYŻOWĄ Celem ćwiczenia jest zapoznanie się ze sposobem działania sieci neuronowych typu MLP (multi-layer perceptron) uczonych nadzorowaną (z nauczycielem,
Newton vs. Lagrange - kto lepszy?
 Uniwersytet Mikołaja Kopernika Wydział Matematyki i Informatyki Katedra Analizy Matematycznej Agnieszka Rydzyńska nr albumu: 254231 Praca Zaliczeniowa z Seminarium Newton vs. Lagrange - kto lepszy? Opiekun
Uniwersytet Mikołaja Kopernika Wydział Matematyki i Informatyki Katedra Analizy Matematycznej Agnieszka Rydzyńska nr albumu: 254231 Praca Zaliczeniowa z Seminarium Newton vs. Lagrange - kto lepszy? Opiekun
Wstęp do sieci neuronowych, wykład 03 Warstwy RBF, jednostka ADALINE.
 Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka ADALINE. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 218-1-15/22 Projekt pn.
Wstęp do sieci neuronowych, wykład 3 Warstwy, jednostka ADALINE. Maja Czoków, Jarosław Piersa, Andrzej Rutkowski Wydział Matematyki i Informatyki, Uniwersytet Mikołaja Kopernika 218-1-15/22 Projekt pn.
Interpolacja funkcji
 Interpolacja funkcji Interpolacja funkcji Interpolacja funkcji Wielomianowa Splajny Lagrange a Trygonometryczna Interpolacja Newtona (wzór I ) Czebyszewa Newtona (wzór II ) ( Wielomiany Czebyszewa ) Załóżmy,
Interpolacja funkcji Interpolacja funkcji Interpolacja funkcji Wielomianowa Splajny Lagrange a Trygonometryczna Interpolacja Newtona (wzór I ) Czebyszewa Newtona (wzór II ) ( Wielomiany Czebyszewa ) Załóżmy,
Obliczenia Naukowe. Wykład 12: Zagadnienia na egzamin. Bartek Wilczyński
 Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
Obliczenia Naukowe Wykład 12: Zagadnienia na egzamin Bartek Wilczyński 6.6.2016 Tematy do powtórki Arytmetyka komputerów Jak wygląda reprezentacja liczb w arytmetyce komputerowej w zapisie cecha+mantysa
wiedzy Sieci neuronowe
 Metody detekcji uszkodzeń oparte na wiedzy Sieci neuronowe Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 7 Wprowadzenie Okres kształtowania się teorii sztucznych sieci
Metody detekcji uszkodzeń oparte na wiedzy Sieci neuronowe Instytut Sterowania i Systemów Informatycznych Universytet Zielonogórski Wykład 7 Wprowadzenie Okres kształtowania się teorii sztucznych sieci
Interpolacja, aproksymacja całkowanie. Interpolacja Krzywa przechodzi przez punkty kontrolne
 Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
Interpolacja, aproksymacja całkowanie Interpolacja Krzywa przechodzi przez punkty kontrolne Aproksymacja Punkty kontrolne jedynie sterują kształtem krzywej INTERPOLACJA Zagadnienie interpolacji można sformułować
ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM. Ćwiczenie 2. Badanie algorytmów adaptacyjnych LMS i RLS
 ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM Ćwiczenie 2 Badanie algorytmów adaptacyjnych LMS i RLS 1. CEL ĆWICZENIA Celem ćwiczenia jest samodzielna implementacja przez studentów dwóch podstawowych
ADAPTACYJNE PRZETWARZANIE SYGNAŁÓW LABORATORIUM Ćwiczenie 2 Badanie algorytmów adaptacyjnych LMS i RLS 1. CEL ĆWICZENIA Celem ćwiczenia jest samodzielna implementacja przez studentów dwóch podstawowych
INFORMATYKA ELEMENTY METOD NUMERYCZNYCH.
 INFORMATYKA ELEMENTY METOD NUMERYCZNYCH http://www.infoceram.agh.edu.pl METODY NUMERYCZNE Metody numeryczne zbiór metod rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
INFORMATYKA ELEMENTY METOD NUMERYCZNYCH http://www.infoceram.agh.edu.pl METODY NUMERYCZNE Metody numeryczne zbiór metod rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która
![3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która](/thumbs/98/137435342.jpg "3. Interpolacja. Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która") 3. Interpolacja Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która przyjmuje wartości y 1, y 2,, y n, dla skończonego zbioru argumentów x 1, x
3. Interpolacja Interpolacja w sensie Lagrange'a (3.1) Dana jest funkcja y= f x określona i ciągła w przedziale [a ;b], która przyjmuje wartości y 1, y 2,, y n, dla skończonego zbioru argumentów x 1, x
Elementy projektowania inzynierskiego Przypomnienie systemu Mathcad
 Elementy projektowania inzynierskiego Definicja zmiennych skalarnych a : [S] - SPACE a [T] - TAB - CTRL b - SHIFT h h. : / Wyświetlenie wartości zmiennych a a = b h. h. = Przykładowe wyrażenia
Elementy projektowania inzynierskiego Definicja zmiennych skalarnych a : [S] - SPACE a [T] - TAB - CTRL b - SHIFT h h. : / Wyświetlenie wartości zmiennych a a = b h. h. = Przykładowe wyrażenia
Rozpoznawanie obrazów
 Rozpoznawanie obrazów Laboratorium Python Zadanie nr 1 Regresja liniowa autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, M. Zięba, J. Kaczmar Cel zadania Celem zadania jest implementacja liniowego zadania
Rozpoznawanie obrazów Laboratorium Python Zadanie nr 1 Regresja liniowa autorzy: A. Gonczarek, J.M. Tomczak, S. Zaręba, M. Zięba, J. Kaczmar Cel zadania Celem zadania jest implementacja liniowego zadania
Interpolacja i modelowanie krzywych 2D i 3D
 Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
Interpolacja i modelowanie krzywych 2D i 3D Dariusz Jacek Jakóbczak Politechnika Koszalińska Wydział Elektroniki i Informatyki Zakład Podstaw Informatyki i Zarządzania e-mail: Dariusz.Jakobczak@tu.koszalin.pl
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ
 ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
ZADANIA OPTYMALIZCJI BEZ OGRANICZEŃ Maciej Patan Uniwersytet Zielonogórski WSTEP Zadanie minimalizacji bez ograniczeń f(ˆx) = min x R nf(x) f : R n R funkcja ograniczona z dołu Algorytm rozwiazywania Rekurencyjny
Zastosowania sieci neuronowych
 Zastosowania sieci neuronowych aproksymacja LABORKA Piotr Ciskowski zadanie 1. aproksymacja funkcji odległość punktów źródło: Żurada i in. Sztuczne sieci neuronowe, przykład 4.4, str. 137 Naucz sieć taką
Zastosowania sieci neuronowych aproksymacja LABORKA Piotr Ciskowski zadanie 1. aproksymacja funkcji odległość punktów źródło: Żurada i in. Sztuczne sieci neuronowe, przykład 4.4, str. 137 Naucz sieć taką
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta
 Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Algorytm wstecznej propagacji błędów dla sieci RBF Michał Bereta www.michalbereta.pl Sieci radialne zawsze posiadają jedną warstwę ukrytą, która składa się z neuronów radialnych. Warstwa wyjściowa składa
Wprowadzenie do Mathcada 1
 Wprowadzenie do Mathcada Ćwiczenie. - Badanie zmienności funkcji kwadratowej Ćwiczenie. pokazuje krok po kroku tworzenie prostego dokumentu w Mathcadzie. Dokument ten składa się z następujących elementów:.
Wprowadzenie do Mathcada Ćwiczenie. - Badanie zmienności funkcji kwadratowej Ćwiczenie. pokazuje krok po kroku tworzenie prostego dokumentu w Mathcadzie. Dokument ten składa się z następujących elementów:.
Metody numeryczne. Sformułowanie zagadnienia interpolacji
 Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
Ćwiczenia nr 4. Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n i wartości y 0,..., y n, takie że i=0,...,n y i = f (x i )). Szukamy funkcji F (funkcji interpolującej), takiej
PODSTAWY AUTOMATYKI. MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI Katedra Inżynierii Systemów Sterowania PODSTAWY AUTOMATYKI MATLAB - komputerowe środowisko obliczeń naukowoinżynierskich - podstawowe operacje na liczbach i macierzach.
Zwięzły kurs analizy numerycznej
 Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
Spis treści Przedmowa... 7 1. Cyfry, liczby i błędy podstawy analizy numerycznej... 11 1.1. Systemy liczbowe... 11 1.2. Binarna reprezentacja zmiennoprzecinkowa... 16 1.3. Arytmetyka zmiennopozycyjna...
Bardzo łatwa lista powtórkowa
 Analiza numeryczna, II rok inf., WPPT- 12 stycznia 2008 Terminy egzaminów Przypominam, że egzaminy odbędą się w następujących terminach: egzamin podstawowy: 30 stycznia, godz. 13 15, C-13/1.31 egzamin
Analiza numeryczna, II rok inf., WPPT- 12 stycznia 2008 Terminy egzaminów Przypominam, że egzaminy odbędą się w następujących terminach: egzamin podstawowy: 30 stycznia, godz. 13 15, C-13/1.31 egzamin
SVM: Maszyny Wektorów Podpieraja cych
 SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
SVM 1 / 24 SVM: Maszyny Wektorów Podpieraja cych Nguyen Hung Son Outline SVM 2 / 24 1 Wprowadzenie 2 Brak liniowej separowalności danych Nieznaczna nieseparowalność Zmiana przetrzeń atrybutów 3 Implementacja
Zastosowanie MES do rozwiązania problemu ustalonego przepływu ciepła w obszarze 2D
 Równanie konstytutywne opisujące sposób w jaki ciepło przepływa w materiale o danych właściwościach, prawo Fouriera Macierz konstytutywna (właściwości) materiału Wektor gradientu temperatury Wektor strumienia
Równanie konstytutywne opisujące sposób w jaki ciepło przepływa w materiale o danych właściwościach, prawo Fouriera Macierz konstytutywna (właściwości) materiału Wektor gradientu temperatury Wektor strumienia
Metody systemowe i decyzyjne w informatyce
 Metody systemowe i decyzyjne w informatyce Laboratorium MATLAB Zadanie nr 1 Regresja liniowa autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z liniowym zadaniem najmniejszych
Metody systemowe i decyzyjne w informatyce Laboratorium MATLAB Zadanie nr 1 Regresja liniowa autorzy: A. Gonczarek, J.M. Tomczak Cel zadania Celem zadania jest zapoznanie się z liniowym zadaniem najmniejszych
Egzamin z Metod Numerycznych ZSI, Egzamin, Gr. A
 Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Egzamin z Metod Numerycznych ZSI, 06.2007. Egzamin, Gr. A Imię i nazwisko: Nr indeksu: Section 1. Test wyboru, max 33 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa odpowiedź
Sterowanie napędów maszyn i robotów
 Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
Wykład 5 - Identyfikacja Instytut Automatyki i Robotyki (IAiR), Politechnika Warszawska Warszawa, 2015 Koncepcje estymacji modelu Standardowe drogi poszukiwania modeli parametrycznych M1: Analityczne określenie
składa się z m + 1 uporządkowanych niemalejąco liczb nieujemnych. Pomiędzy p, n i m zachodzi następująca zależność:
 TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
TEMATYKA: Krzywe typu Splajn (Krzywe B sklejane) Ćwiczenia nr 8 Krzywe Bezier a mają istotne ograniczenie. Aby uzyskać kształt zawierający wiele punktów przegięcia niezbędna jest krzywa wysokiego stopnia.
doc. dr Beata Pułska-Turyna Zarządzanie B506 mail: mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505.
 doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
doc. dr Beata Pułska-Turyna Zakład Badań Operacyjnych Zarządzanie B506 mail: turynab@wz.uw.edu.pl mgr Piotr J. Gadecki Zakład Badań Operacyjnych Zarządzania B 505. Tel.: (22)55 34 144 Mail: student@pgadecki.pl
Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie CUDA.
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Automatyka i Robotyka Praca magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Automatyka i Robotyka Praca magisterska Implementacja algorytmów filtracji adaptacyjnej o strukturze transwersalnej na platformie
Zaawansowane metody numeryczne
 Wykład 1 Zadanie Definicja 1.1. (zadanie) Zadaniem nazywamy zagadnienie znalezienia rozwiązania x spełniającego równanie F (x, d) = 0, gdzie d jest zbiorem danych (od których zależy rozwiązanie x), a F
Wykład 1 Zadanie Definicja 1.1. (zadanie) Zadaniem nazywamy zagadnienie znalezienia rozwiązania x spełniającego równanie F (x, d) = 0, gdzie d jest zbiorem danych (od których zależy rozwiązanie x), a F
Układy równań liniowych. Krzysztof Patan
 Układy równań liniowych Krzysztof Patan Motywacje Zagadnienie kluczowe dla przetwarzania numerycznego Wiele innych zadań redukuje się do problemu rozwiązania układu równań liniowych, często o bardzo dużych
Układy równań liniowych Krzysztof Patan Motywacje Zagadnienie kluczowe dla przetwarzania numerycznego Wiele innych zadań redukuje się do problemu rozwiązania układu równań liniowych, często o bardzo dużych
Regresja nieparametryczna series estimator
 Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Regresja nieparametryczna series estimator 1 Literatura Bruce Hansen (2018) Econometrics, rozdział 18 2 Regresja nieparametryczna Dwie główne metody estymacji Estymatory jądrowe Series estimators (estymatory
Sieć Hopfielda. Sieci rekurencyjne. Ewa Adamus. ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych.
 Sieci rekurencyjne Ewa Adamus ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych 7 maja 2012 Jednowarstwowa sieć Hopfielda, z n neuronami Bipolarna funkcja przejścia W wariancie
Sieci rekurencyjne Ewa Adamus ZUT Wydział Informatyki Instytut Sztucznej Inteligencji i Metod Matematycznych 7 maja 2012 Jednowarstwowa sieć Hopfielda, z n neuronami Bipolarna funkcja przejścia W wariancie
Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe
 Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe Trening jednokierunkowych sieci neuronowych wykład 2. dr inż. PawełŻwan Katedra Systemów Multimedialnych Politechnika Gdańska
Inteligentne systemy decyzyjne: Uczenie maszynowe sztuczne sieci neuronowe Trening jednokierunkowych sieci neuronowych wykład 2. dr inż. PawełŻwan Katedra Systemów Multimedialnych Politechnika Gdańska
Całkowanie numeryczne przy użyciu kwadratur
 Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
Całkowanie numeryczne przy użyciu kwadratur Plan wykładu: 1. Kwadratury Newtona-Cotesa a) wzory: trapezów, parabol etc. b) kwadratury złożone 2. Ekstrapolacja a) ekstrapolacja Richardsona b) metoda Romberga
Promotor: dr Marek Pawełczyk. Marcin Picz
 Promotor: dr Marek Pawełczyk Marcin Picz Stosowane metody: - Grupa metod odejmowania widm (subtractive( subtractive-typetype algorithms); - Filtracja Wienera; - Neural networks & Fuzzy logic (sieci neuronowe
Promotor: dr Marek Pawełczyk Marcin Picz Stosowane metody: - Grupa metod odejmowania widm (subtractive( subtractive-typetype algorithms); - Filtracja Wienera; - Neural networks & Fuzzy logic (sieci neuronowe
Symulacyjne metody wyceny opcji amerykańskich
 Metody wyceny Piotr Małecki promotor: dr hab. Rafał Weron Instytut Matematyki i Informatyki Politechniki Wrocławskiej Wrocław, 0 lipca 009 Metody wyceny Drzewko S 0 S t S t S 3 t S t St St 3 S t St St
Metody wyceny Piotr Małecki promotor: dr hab. Rafał Weron Instytut Matematyki i Informatyki Politechniki Wrocławskiej Wrocław, 0 lipca 009 Metody wyceny Drzewko S 0 S t S t S 3 t S t St St 3 S t St St
Ćwiczenia nr 7. TEMATYKA: Krzywe Bézier a
 TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
TEMATYKA: Krzywe Bézier a Ćwiczenia nr 7 DEFINICJE: Interpolacja: przybliżanie funkcji za pomocą innej funkcji, zwykle wielomianu, tak aby były sobie równe w zadanych punktach. Poniżej przykład interpolacji
Kodowanie i kompresja Streszczenie Studia Licencjackie Wykład 11,
 1 Kwantyzacja skalarna Kodowanie i kompresja Streszczenie Studia Licencjackie Wykład 11, 10.05.005 Kwantyzacja polega na reprezentowaniu dużego zbioru wartości (być może nieskończonego) za pomocą wartości
1 Kwantyzacja skalarna Kodowanie i kompresja Streszczenie Studia Licencjackie Wykład 11, 10.05.005 Kwantyzacja polega na reprezentowaniu dużego zbioru wartości (być może nieskończonego) za pomocą wartości
Analiza numeryczna Kurs INP002009W. Wykład 8 Interpolacja wielomianowa. Karol Tarnowski A-1 p.223
 Analiza numeryczna Kurs INP002009W Wykład 8 Interpolacja wielomianowa Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Wielomian interpolujący Wzór interpolacyjny Newtona Wzór interpolacyjny
Analiza numeryczna Kurs INP002009W Wykład 8 Interpolacja wielomianowa Karol Tarnowski karol.tarnowski@pwr.wroc.pl A-1 p.223 Plan wykładu Wielomian interpolujący Wzór interpolacyjny Newtona Wzór interpolacyjny
y i b) metoda różnic skończonych nadal problem nieliniowy 2 go rzędu z warunkiem Dirichleta
 metoda różnic skończonych nadal problem nieliniowy 2 go rzędu z warunkiem Dirichleta") b) metoda różnic skończonych nadal problem nieliniowy 2 go rzędu z warunkiem Dirichleta przedział (a,b) dzielimy na siatkę, powiedzmy o stałym kroku: punkty siatki: u A y i w metodzie strzałów używamy
b) metoda różnic skończonych nadal problem nieliniowy 2 go rzędu z warunkiem Dirichleta przedział (a,b) dzielimy na siatkę, powiedzmy o stałym kroku: punkty siatki: u A y i w metodzie strzałów używamy
METODY NUMERYCZNE. wykład. konsultacje: wtorek 10:00-11:30 środa 10:00-11:30. dr inż. Grażyna Kałuża pokój
 METODY NUMERYCZNE wykład dr inż. Grażyna Kałuża pokój 103 konsultacje: wtorek 10:00-11:30 środa 10:00-11:30 www.kwmimkm.polsl.pl Program przedmiotu wykład: 15 godzin w semestrze laboratorium: 30 godzin
METODY NUMERYCZNE wykład dr inż. Grażyna Kałuża pokój 103 konsultacje: wtorek 10:00-11:30 środa 10:00-11:30 www.kwmimkm.polsl.pl Program przedmiotu wykład: 15 godzin w semestrze laboratorium: 30 godzin
Elementy inteligencji obliczeniowej
 Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Elementy inteligencji obliczeniowej Paweł Liskowski Institute of Computing Science, Poznań University of Technology 9 October 2018 1 / 19 Perceptron Perceptron (Rosenblatt, 1957) to najprostsza forma sztucznego
Politechnika Krakowska im. Tadeusza Kościuszki. Karta przedmiotu. obowiązuje studentów rozpoczynających studia w roku akademickim 2016/2017
 Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 206/207 Kierunek studiów: Budownictwo Profil:
Politechnika Krakowska im. Tadeusza Kościuszki Karta przedmiotu Wydział Inżynierii Środowiska obowiązuje studentów rozpoczynających studia w roku akademickim 206/207 Kierunek studiów: Budownictwo Profil:
przetworzonego sygnału
 Synteza falek ortogonalnych na podstawie oceny przetworzonego sygnału Instytut Informatyki Politechnika Łódzka 28 lutego 2012 Plan prezentacji 1 Sformułowanie problemu 2 3 4 Historia przekształcenia falkowego
Synteza falek ortogonalnych na podstawie oceny przetworzonego sygnału Instytut Informatyki Politechnika Łódzka 28 lutego 2012 Plan prezentacji 1 Sformułowanie problemu 2 3 4 Historia przekształcenia falkowego
Filtr Kalmana. Struktury i Algorytmy Sterowania Wykład 1-2. prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz
 Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Filtr Kalmana Struktury i Algorytmy Sterowania Wykład 1-2 prof. dr hab. inż. Mieczysław A. Brdyś mgr inż. Tomasz Zubowicz Politechnika Gdańska, Wydział Elektortechniki i Automatyki 2013-10-09, Gdańsk Założenia
Laboratorium 5 Przybliżone metody rozwiązywania równań nieliniowych
 Uniwersytet Zielonogórski Wydział Informatyki, Elektrotechniki i Telekomunikacji Instytut Sterowania i Systemów Informatycznych Elektrotechnika niestacjonarne-zaoczne pierwszego stopnia z tyt. inżyniera
Uniwersytet Zielonogórski Wydział Informatyki, Elektrotechniki i Telekomunikacji Instytut Sterowania i Systemów Informatycznych Elektrotechnika niestacjonarne-zaoczne pierwszego stopnia z tyt. inżyniera
Egzamin z Metod Numerycznych ZSI, Grupa: A
 Egzamin z Metod Numerycznych ZSI, 06.2005. Grupa: A Nazwisko: Imię: Numer indeksu: Ćwiczenia z: Data: Część 1. Test wyboru, max 36 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa
Egzamin z Metod Numerycznych ZSI, 06.2005. Grupa: A Nazwisko: Imię: Numer indeksu: Ćwiczenia z: Data: Część 1. Test wyboru, max 36 pkt Zaznacz prawidziwe odpowiedzi literą T, a fałszywe N. Każda prawidłowa
Optymalizacja ciągła
 Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
Optymalizacja ciągła 5. Metody kierunków poparwy (metoda Newtona-Raphsona, metoda gradientów sprzężonych) Wojciech Kotłowski Instytut Informatyki PP http://www.cs.put.poznan.pl/wkotlowski/ 28.03.2019 1
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu
 1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
1 Metody rozwiązywania równań nieliniowych. Postawienie problemu Dla danej funkcji ciągłej f znaleźć wartości x, dla których f(x) = 0. (1) 2 Przedział izolacji pierwiastka Będziemy zakładać, że równanie
Cyfrowe przetwarzanie obrazów i sygnałów Wykład 7 AiR III
 1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
1 Niniejszy dokument zawiera materiały do wykładu z przedmiotu Cyfrowe Przetwarzanie Obrazów i Sygnałów. Jest on udostępniony pod warunkiem wykorzystania wyłącznie do własnych, prywatnych potrzeb i może
Modyfikacja schematu SCPF obliczeń energii polaryzacji
 Modyfikacja schematu SCPF obliczeń energii polaryzacji Zakład Metod Obliczeniowych Chemii 11 kwietnia 2006 roku 1 Po co? Jak? 2 Algorytm Analiza zbieżności 3 dla układów symetrycznych 4 Fulleren 5 Po co?
Modyfikacja schematu SCPF obliczeń energii polaryzacji Zakład Metod Obliczeniowych Chemii 11 kwietnia 2006 roku 1 Po co? Jak? 2 Algorytm Analiza zbieżności 3 dla układów symetrycznych 4 Fulleren 5 Po co?
Układy stochastyczne
 Instytut Informatyki Uniwersytetu Śląskiego 21 stycznia 2009 Definicja Definicja Proces stochastyczny to funkcja losowa, czyli funkcja matematyczna, której wartości leżą w przestrzeni zdarzeń losowych.
Instytut Informatyki Uniwersytetu Śląskiego 21 stycznia 2009 Definicja Definicja Proces stochastyczny to funkcja losowa, czyli funkcja matematyczna, której wartości leżą w przestrzeni zdarzeń losowych.
Metody numeryczne I Równania nieliniowe
 Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Metody numeryczne I Równania nieliniowe Janusz Szwabiński szwabin@ift.uni.wroc.pl Metody numeryczne I (C) 2004 Janusz Szwabiński p.1/66 Równania nieliniowe 1. Równania nieliniowe z pojedynczym pierwiastkiem
Analiza obrazów - sprawozdanie nr 2
 Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
Analiza obrazów - sprawozdanie nr 2 Filtracja obrazów Filtracja obrazu polega na obliczeniu wartości każdego z punktów obrazu na podstawie punktów z jego otoczenia. Każdy sąsiedni piksel ma wagę, która
KADD Minimalizacja funkcji
 Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Minimalizacja funkcji n-wymiarowych Forma kwadratowa w n wymiarach Procedury minimalizacji Minimalizacja wzdłuż prostej w n-wymiarowej przestrzeni Metody minimalizacji wzdłuż osi współrzędnych wzdłuż kierunków
Matematyka stosowana i metody numeryczne
 Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładów Błędy obliczeń Błędy można podzielić na: modelu, metody, wejściowe (początkowe), obcięcia, zaokrągleń..
Ewa Pabisek Adam Wosatko Piotr Pluciński Matematyka stosowana i metody numeryczne Konspekt z wykładów Błędy obliczeń Błędy można podzielić na: modelu, metody, wejściowe (początkowe), obcięcia, zaokrągleń..
Wprowadzenie do teorii ekonometrii. Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe
 Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
Wprowadzenie do teorii ekonometrii Wykład 1 Warunkowa wartość oczekiwana i odwzorowanie liniowe Zajęcia Wykład Laboratorium komputerowe 2 Zaliczenie EGZAMIN (50%) Na egzaminie obowiązują wszystkie informacje
Algorytmy genetyczne w interpolacji wielomianowej
 Algorytmy genetyczne w interpolacji wielomianowej (seminarium robocze) Seminarium Metod Inteligencji Obliczeniowej Warszawa 22 II 2006 mgr inż. Marcin Borkowski Plan: Przypomnienie algorytmu niszowego
Algorytmy genetyczne w interpolacji wielomianowej (seminarium robocze) Seminarium Metod Inteligencji Obliczeniowej Warszawa 22 II 2006 mgr inż. Marcin Borkowski Plan: Przypomnienie algorytmu niszowego
Systemy. Krzysztof Patan
 Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Systemy Krzysztof Patan Systemy z pamięcią System jest bez pamięci (statyczny), jeżeli dla dowolnej chwili t 0 wartość sygnału wyjściowego y(t 0 ) zależy wyłącznie od wartości sygnału wejściowego w tej
Sieć przesyłająca żetony CP (counter propagation)
") Sieci neuropodobne IX, specyficzne architektury 1 Sieć przesyłająca żetony CP (counter propagation) warstwa Kohonena: wektory wejściowe są unormowane jednostki mają unormowane wektory wag jednostki są
Sieci neuropodobne IX, specyficzne architektury 1 Sieć przesyłająca żetony CP (counter propagation) warstwa Kohonena: wektory wejściowe są unormowane jednostki mają unormowane wektory wag jednostki są
Metody numeryczne. Sformułowanie zagadnienia interpolacji
 Wykład nr 2 Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n (nazywane węzłami interpolacji) i wartości w węzłach y 0,..., y n. Od węzłów żądamy spełnienia warunku x i x j dla
Wykład nr 2 Sformułowanie zagadnienia interpolacji Niech będą dane punkty x 0,..., x n (nazywane węzłami interpolacji) i wartości w węzłach y 0,..., y n. Od węzłów żądamy spełnienia warunku x i x j dla
Programowanie liniowe
 Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Badania operacyjne Problem Model matematyczny Metoda rozwiązania Znaleźć optymalny program produkcji. Zmaksymalizować 1 +3 2 2 3 (1) Przy ograniczeniach 3 1 2 +2 3 7 (2) 2 1 +4 2 12 (3) 4 1 +3 2 +8 3 10
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa. P. F. Góra
 Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Wstęp do metod numerycznych Uwarunkowanie Eliminacja Gaussa P. F. Góra http://th-www.if.uj.edu.pl/zfs/gora/ 2012 Uwarunkowanie zadania numerycznego Niech ϕ : R n R m będzie pewna funkcja odpowiednio wiele
Obliczenia naukowe Wykład nr 6
 Obliczenia naukowe Wykład nr 6 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [1] D. Kincaid, W. Cheney, Analiza
Obliczenia naukowe Wykład nr 6 Paweł Zieliński Katedra Informatyki, Wydział Podstawowych Problemów Techniki, Politechnika Wrocławska Literatura Literatura podstawowa [1] D. Kincaid, W. Cheney, Analiza
04 Układy równań i rozkłady macierzy - Ćwiczenia. Przykład 1 A =
 04 Układy równań i rozkłady macierzy - Ćwiczenia 1. Wstęp Środowisko Matlab można z powodzeniem wykorzystać do rozwiązywania układów równań z wykorzystaniem rozkładów macierzy m.in. Rozkładu Choleskiego,
04 Układy równań i rozkłady macierzy - Ćwiczenia 1. Wstęp Środowisko Matlab można z powodzeniem wykorzystać do rozwiązywania układów równań z wykorzystaniem rozkładów macierzy m.in. Rozkładu Choleskiego,
UKŁADY ALGEBRAICZNYCH RÓWNAŃ LINIOWYCH
 Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych
Transport, studia niestacjonarne I stopnia, semestr I Instytut L-5, Wydział Inżynierii Lądowej, Politechnika Krakowska Ewa Pabisek Adam Wosatko Postać układu równań liniowych Układ liniowych równań algebraicznych