Skład zespołu SKNL. Maciej Dubiel student 3go MDLiK, specjalność Płatowce. Grzegorz Łobodziński student 3go MDLiK, specjalność Awionika
|
|
|
- Elżbieta Smolińska
- 7 lat temu
- Przeglądów:
Transkrypt


1
2 Skład zespołu SKNL Maciej Dubiel student 3go MDLiK, specjalność Płatowce Grzegorz Łobodziński student 3go MDLiK, specjalność Awionika Błażej Morawski student 3go MDLiK, specjalność Płatowce Maciej Roga student 4go MDL, specjalność Silniki Lotnicze Michał Wojas student 3go MDLiK, specjalność Silniki Lotnicze Przemysław Lekston student 5go MDL, specjalność Pilotaż



3 Projekt Bezzałogowego Aparatu Latającego PR-2 Gacek Studenckie Koło Naukowe Lotników oraz Koło Naukowe Euroavia Rzeszów Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Ul. Powstańców Warszawy Rzeszów
4 Założenie Projektowe Spełnienie Założeń Regulaminowych Konkursu Budowa całkowicie kompozytowego Płatowca Powtarzalność Produkcji samolotu Wykorzystanie w procesie projektowym i produkcyjnym zintegrowanych systemów Projektowania CAD/CAM/CAE Wykorzystanie przy produkcji samolotu technologii CNC
5 Wybrane założenia Konkursowe - Ograniczenie masy do 5 [kg]; - W stanie gotowym do transportu płatowiec BAL musi zmieścić się w pojemniku transportowym o wymiarach wewnętrznych 1000 x 300 x 350 [mm]; - zadanie konkursowe polegało na wskazaniu punktu z podaniem pozycji z GPS - BAL musi być wyposażony w system spadochronowy zapewniający bezpiczne lądowanie i prędkość opadania nie większą niż 7 [m/s]



6 Prototyp Pr-1 Szpion Budowa Pr-1: Kadłub struktura przekładkowa + balsa Skrzydła Balsa kryta folią termokurczliwą


7 Po oblocie PR-1 stwierdzono, że bezpilotowiec : posiada bardzo dobre osiągi, jest stateczny i łatwy w pilotażu, na bazie układu PR-1 należy kontynuować dalsze prace
8 Bazując na doświadczeniach przy pracach nad PR-1 powstał nowy bezpilotowiec Wprowadzono następujące zmiany: kadłub oraz usterzenie pionowe w całości z kompozytów szklanych oraz węglowych, skrzydła oraz usterzenie poziome o strukturze skorupowej, odczepiane gondole silnikowe, łatwy dostęp do wyposażenia awionicznego, zmodyfikowano łączenie skrzydeł, zmodyfikowano usterzenie pionowe oraz poziome
9 PR-2 Gacek - Charakterystyka Wymiary: rozpiętość 1800 [mm]; długość 1300 [mm]; wysokość 282 [mm]; Masa: ok [g] (z pełnym wyposażeniem); Profil: Clark Y; Cięciwa Profilu: 340 [mm]; Napęd: Dwa silniki elektryczne trójfazowe AXI 2820/12 Zasilanie: Wysokowydajne ogniwa Li-Pol ( 11.1 [V], 3700mAh) Czas lotu: [min] Prędkość: [km/h] Technologia wykonania: Kompozyty szklane oraz węglowe, struktury przekładkowe, styropian + balsa Wyposażenie pokładowe: kamera, nadajnik wideo, radiomodem, komputer pokładowy, odbiornik GPS



10 Konstrukcja - skrzydło



11 Konstrukcja - skrzydło




12 Konstrukcja - Kadłub



13 Głowica kamery sterowanie ruchem kamery z ziemi

 Rejestracja momentu otwarcia")
14 Pr-2 Jako Latające Laboratorium Pr-2 został wykorzystany jako latające laboratorium podczas warsztatów dla studentów Politechniki Rzeszowskiej w październiku 2007 oraz Czerwcu 2008 Wykonane Badania: Rejestracja parametrów lotu bezałogowca Wizualizacja opływu samolotu (przekaz video w czasie rzeczywistym) Rejestracja momentu otwarcia spadochronu
15 Pr-3 Charakterystyka Wymiary: rozpiętość 1920 [mm]; długość 1380 [mm]; wysokość 333 [mm]; Masa: ok [g] (z pełnym wyposażeniem); Profil: NACA 2415; Cięciwa Profilu: 340 [mm]; Napęd: Dwa silniki elektryczne trójfazowe AXI 2826/10 Zasilanie: Wysokowydajne ogniwa Li-Pol (22,2[V], 5000mAh) Czas lotu: ok.40 [min] Prędkość: [km/h] Technologia wykonania: Kompozyty szklane, węglowy oraz aramidowy Wyposażenie pokładowe: kamera, nadajnik wideo, radiomodem, komputer pokładowy odbiornik GPS, system ratunkowy, OSD, AHRS,
16 Pr-3 Charakterystyka Wprowadzono następujące zmiany: Użycie technologii CNC przy produkcji płatowca Skrzydła z kompozytu szkalno-węglowego Kompozytowy statecznik Użycie technologii Vaccum przy wytwarzaniu kompozytów Umiejscowienie baterii w skrzydłach Wykonanie nowej głowicy kamery Zastosowanie modułowego systemu ratunkowego Ulepszenie stacji naziemnej


17 Pr-3 CNC Przygotowanie rzeczywistego modelu detali w systemie Catia Stworzenie modelu 3D foremników Generowanie G-Code w programie ArtCam Zaprogramowanie rodzaju narzędzia i ścieżki jego ruchu Wycięcie foremników na frezarce ploterowej Obróbka wykańczająca Nałożenie podkładu akrylowego i lakieru poliuratynowego

18 Pr-3 - Kadłub


19 Pr-3 Kadłub Kadłub wykonany z kompozytu szklano węglowo - aramidowego


20 Pr-3 Kadłub


21 Kadłub wykonano przy pomocy techniki worka próżniowego Pr-3 Kadłub

 znajduje się źródło zasilania silnika Wykonano przy pomocy techniki worka")
22 Pr-3 Skrzydła Skrzydło prostokątne skorupowe, dwudźwigarowe Dźwigar przedni i tylni ceowy z pasami i ściankami z laminatu Pokrycie przekładkowe laminat-pianka-laminat Dwa żebra szczątkowe i jedno całe zamykające skrzydło od strony kadłuba W części kesonowej pomiędzy żebrami (zamykającym oraz gondolowym) znajduje się źródło zasilania silnika Wykonano przy pomocy techniki worka próżniowego



23 Pr-3 Skrzydła


24 Pr-3 Głowica Wykonana z tkaniny węglowej i szklanej o gramaturze 80 [g/m2] Wyposażona w ruchomą kulę (obracającą się wokół jednej osi), w której znajduje się minikamera o wysokiej rozdzielczości Mechanizm napędzany serwami

25 Pr-3 Głowica


26 Pr-3 System sterowania kamerą Sterowanie ruchami kamery odbywa się drogą radiową ze stacji naziemnej Sygnał sterujący otrzymywany jest za pomocą pomiarów z jednostki AHRS zintegrowanej z hełmem, ruchy głowy obserwatora są dokładnie odwzorowane na ruchy kamery na głowicy, a na okulary podawany jest obraz odebrany z kamery. Pozwala to operatorowi układu na odbieranie wrażeń wzrokowych symulujących jego obecność na pokładzie statku powietrznego.


27 System Video Kamera Przetwornik: Rozdzielczość: Czułość: Ogniskowa Obiektywu: Waga: CCD 1/3 Sony 570 lini 0,3 lux 3,6 mm 90 g Nadajnik Video: Częstotliwość Pracy: Moc Nadajnika: Zasięg: Waga: 2,4 GHz 1 W 15 km 110 g
28 Pr-3 Osiągi Prędkość Minimalna: 34,16 [km/h] Prędkość Ekonomiczna: 47,54 [km/h] Prędkość Optymalna: 63,58 [km/h] Minimalna Prędkość Opadania: 0,73 [m/s]

29 Pr-3 Osiągi

30 System transmisji Danych
31 Schemat Blokowy Systemu


32 Zasada działania Systemu transmisji Danych Odbiornik GPS Radiomodem I PC MSC1210Y5 Radiomodem II
33 Charakterystyka urządzeń Odbiornik GPS firmy Rikaline Przesyła informacje z prędkością 4800 [bps] Format danych wyjściowych NMEA 0183 Poziom sygnałów: TTL oraz RS-232 Forma znakowa danych (kod ASCII)
34 Charakterystyka urządzeń Mikrokomputer MSC1210Y5 firmy Texas Instruments Posiada rdzeń 8051 Wysokiej klasy (24 bitowy) przetwornik analogowo cyfrowy Posiada dwa porty szeregowe z możliwością ustawienia na każdym różnych prędkości przesyłu danych
![Charakterystyka urządzeń Radiomodem 433 [MHz] firmy Soyter Oparty na chipie CC1000 firmy Chipcon Prosty w obsłudze Łatwa](/docs-images/60/45146619/images/35-0.png "konfiguracja zarówno w torze szeregowym jak i w radiowym. Posiada zasięg w otwartym terenie do 100 [m].")
35 Charakterystyka urządzeń Radiomodem 433 [MHz] firmy Soyter Oparty na chipie CC1000 firmy Chipcon Prosty w obsłudze Łatwa konfiguracja zarówno w torze szeregowym jak i w radiowym. Posiada zasięg w otwartym terenie do 100 [m]. Maksymalna ramka 54 bajty danych
36 Oprogramowanie Dla mikrokomputera MSC1210Y5 program analizujący sygnał z GPS, przetwarzający go i wybierający interesujące informacje został napisany przy użyciu języka niskiego poziomu - Asemblera.

37 Oprogramowanie Stacji Naziemnej Oprogramowanie dla stacji naziemnej powstało przy użyciu Visual Basic Wizualizowane są wybrane parametry lotu
38 Schemat Blokowy Stacji Naziemnej

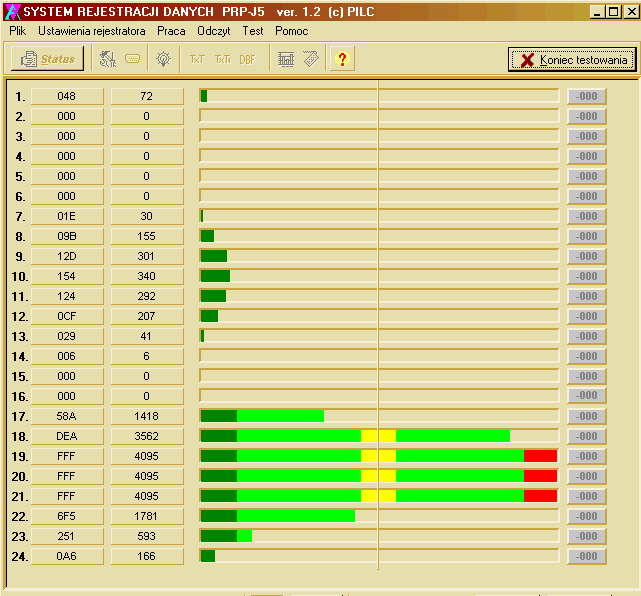
39 Próby z Rejestratorem Lotu PRP-J5 Bezzałogowego Aparatu Latającego PR-2 Gacek



40

41

42 System ratunkowy
43 SKRZYNKA SPADOCHRONOWA ZAMIENNY MODUŁ AUTOMATYCZNE ZAMYKANIE LEKKA KONSTRUKCJA NIEZAWODNE DZIAŁANIE
44 MOCOWANIE DO KADŁUBA KONSTRUKCJA ALUMINIOWA AUTOMATYCZNE MOCOWANIE SKRZYNKI SPADOCHRONOWEJ
45 MOCOWANIE SPADOCHRONU LINKI MOCOWANE DO PUNKTÓW SIŁOWYCH KADŁUBA
46 SPADOCHRON KRZYŻOWY Używane są najczęściej jako spadochrony hamujące Większy czas otwarcia w porównaniu do tradycyjnych spadochronów. Przeciążenia działające na ładunek, linki oraz czaszę spadochronu są mniejsze.. - Powierzchnia: 1.98m 2 - Waga: 286g




47 PROCES BUDOWY
48 SPADOCHRON PIERŚCIENIOWY Używane są najczęściej jako spadochrony ratunkowe Błyskawiczne otwarcie i szybkie wytracenie prędkości Używane do stosunkowo niewielkich prędkości Duże przeciążenia na konstrukcję Stabilne i powolne opadanie - Powierzchnia: 3.7 m 2 - Waga: 261g



49 PROCES BUDOWY


50 OSŁONA - SPOWOLNIENIE OTWARCIA - ZASTĘPUJE PILOCIK WYCIĄGAJĄCY


51 PRÓBY TESTY WYKONYWANO W WARUNKACH BEZWIETRZNYCH JAKO ŁADUNEK SŁUŻYŁ WAGOWY CIĘZAREK O WADZE 5kg MIERZONO CZAS OPADANIA NA DŁUGOŚCI 35m




52




53

54

55

56

57

58
Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki Lotnicze,
 Członkowie Koła Naukowego Lotników: Maciej Dubiel student 4go MDLiK, specjalność Płatowce, Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki
Członkowie Koła Naukowego Lotników: Maciej Dubiel student 4go MDLiK, specjalność Płatowce, Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki
BEZZAŁOGOWY APARAT LATAJĄCY PR-3 GACEK
 BEZZAŁOGOWY APARAT LATAJĄCY PR-3 GACEK DOKUMENTACJA TECHNICZNA WSTĘP I. Geneza projektu Bezzałogowy Statek Latający PR-3 został zaprojektowany przez grupę studentów Wydziału Budowy Maszyn i Lotnictwa Politechniki
BEZZAŁOGOWY APARAT LATAJĄCY PR-3 GACEK DOKUMENTACJA TECHNICZNA WSTĘP I. Geneza projektu Bezzałogowy Statek Latający PR-3 został zaprojektowany przez grupę studentów Wydziału Budowy Maszyn i Lotnictwa Politechniki
BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012
 BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 2012 07 08
 BSL-X1 Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 07 08 I. Opis systemu BSL X1 W skład bezzałogowego systemu latającego BSL X1, wchodzą następujące części: stacja
BSL-X1 Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 07 08 I. Opis systemu BSL X1 W skład bezzałogowego systemu latającego BSL X1, wchodzą następujące części: stacja
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF
 DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
Krzysztof Płatek, Marcel Smoliński
 Krzysztof Płatek, Marcel Smoliński Samolot udźwigowy na zawody Air Cargo 2015 Stuttgart ukończenie: sierpień 2015 Prototyp samolotu solarnego SOLARIS ukończenie: wrzesień 2015 Prototyp samolotu dalekiego
Krzysztof Płatek, Marcel Smoliński Samolot udźwigowy na zawody Air Cargo 2015 Stuttgart ukończenie: sierpień 2015 Prototyp samolotu solarnego SOLARIS ukończenie: wrzesień 2015 Prototyp samolotu dalekiego
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]](/thumbs/59/43314735.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]") Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego. Paweł Rzucidło
 Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów z
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów z
System bezpośredniego i zdalnego monitoringu geodezyjnego Część 1
 Sprawa Nr RAP.272.17.20134 załącznik nr 6.1. do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:... NAZWA PRZEDMIOTU ZAMÓWIENIA:
Sprawa Nr RAP.272.17.20134 załącznik nr 6.1. do SIWZ (nazwa i adres Wykonawcy) PARAMETRY TECHNICZNE PRZEDMIOTU ZAMÓWIENIA Nazwa i typ (producent) oferowanego urządzenia:... NAZWA PRZEDMIOTU ZAMÓWIENIA:
PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE
 PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE System bezzałogowy Fenix System FENIX to nowoczesna i wielofunkcyjna platforma bezzałogowa oparta na zminiaturyzowanych podzespołach oraz sprawdzonych
PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE System bezzałogowy Fenix System FENIX to nowoczesna i wielofunkcyjna platforma bezzałogowa oparta na zminiaturyzowanych podzespołach oraz sprawdzonych
STUDENCKIE KOŁO NAUKOWE CHIP
 STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja Cel konkursu
 Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
WYDZIAŁ MECHANICZNO-ENERGETYCZNY. Bezzałogowy samolot obserwacyjny GROT
 WYDZIAŁ MECHANICZNO-ENERGETYCZNY WYDZIAŁOWY ZAKŁAD INŻYNIERII LOTNICZEJ Bezzałogowy samolot obserwacyjny GROT 1 WPROWADZENIE. 1.1.1 HISTORIA UCZESTNICTWA W KONKURSIE. Politechnika Wrocławska i koło naukowe
WYDZIAŁ MECHANICZNO-ENERGETYCZNY WYDZIAŁOWY ZAKŁAD INŻYNIERII LOTNICZEJ Bezzałogowy samolot obserwacyjny GROT 1 WPROWADZENIE. 1.1.1 HISTORIA UCZESTNICTWA W KONKURSIE. Politechnika Wrocławska i koło naukowe
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF. Mariusz Kacprzak, Konrad Wodziński
 Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology
 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE
 WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej
 Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej 1 Pozyskiwanie danych Typy bezzałogowców wykorzystywanych do oblotów Samoloty bezzałogowe: Duże obiekty powierzchniowe
Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej 1 Pozyskiwanie danych Typy bezzałogowców wykorzystywanych do oblotów Samoloty bezzałogowe: Duże obiekty powierzchniowe
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia I stopnia stacjonarne Rzeszów, 12 Listopada 2014 Plan studiów
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia I stopnia stacjonarne Rzeszów, 12 Listopada 2014 Plan studiów
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych. Autor: Tomasz Gluziński
 Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
Cyfrowy rejestrator parametrów lotu dla bezzałogowych statków powietrznych Autor: Tomasz Gluziński Bezzałogowe Statki Powietrzne W dzisiejszych czasach jedną z najbardziej dynamicznie rozwijających się
WSPÓŁPRACA NAUKA PRZEMYSŁ
 Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015
 AERO LOGIN Sp. z o.o. Kaniów, dnia 31.12.2015 ul. Stefana Kóski 45, 43-512 Kaniów ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015 Wynajem bezzałogowych statków powietrznych wraz usługami związanymi z eksploatacją
AERO LOGIN Sp. z o.o. Kaniów, dnia 31.12.2015 ul. Stefana Kóski 45, 43-512 Kaniów ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015 Wynajem bezzałogowych statków powietrznych wraz usługami związanymi z eksploatacją
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA
 BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE
 PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
To jeszcze prostsze, MMcc1100!
 MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
MMcc1100 jest miniaturowym, kompletnym modułem nadawczo-odbiorczym (transceiverem), słuŝącym do przesyłania danych w postaci cyfrowej, zbudowanym w oparciu o układ CC1100 firmy Texas Instruments. Moduł
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]](/thumbs/56/39412017.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]") Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie
 Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie Samolot Lublin R-XX (LWS-1 ) ( (1935) wodnosamolot torpedowo-rozpoznawczy dalekiego zasięgu. Konstrukcja wodnosamolotu R-XX: Wolnonośny dolnopłat
Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie Samolot Lublin R-XX (LWS-1 ) ( (1935) wodnosamolot torpedowo-rozpoznawczy dalekiego zasięgu. Konstrukcja wodnosamolotu R-XX: Wolnonośny dolnopłat
Bezzałogowy samolot rozpoznawczy Mikro BSP
 Bezzałogowy samolot rozpoznawczy Mikro BSP Konrad Warnicki Tomasz Wnuk Opiekun pracy: dr. Andrzej Ignaczak Kierownik pracy: dr. Ryszard Kossowski Projekt bezzałogowego samolotu rozpoznawczego Konsorcjum:
Bezzałogowy samolot rozpoznawczy Mikro BSP Konrad Warnicki Tomasz Wnuk Opiekun pracy: dr. Andrzej Ignaczak Kierownik pracy: dr. Ryszard Kossowski Projekt bezzałogowego samolotu rozpoznawczego Konsorcjum:
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu. 20 maja, 2016 R. Krenz 1
 Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA
 UAV BIRDIE JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany
UAV BIRDIE JEDNA PLATFORMA, WIELE ZASTOSOWAŃ: GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany
OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI
 OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI fotografia i film produkcja i naprawy dronów www.fotoacc.pl biuro@fotoacc.pl +48 512 233 363 +48 512 233 363 film fotografia Nasza przygoda z projektowaniem oraz
OFERTA FIRMY FOTOACC GRZEGORZ ŁOBODZIŃSKI fotografia i film produkcja i naprawy dronów www.fotoacc.pl biuro@fotoacc.pl +48 512 233 363 +48 512 233 363 film fotografia Nasza przygoda z projektowaniem oraz
STUDENCKIE KOŁO NAUKOWE LOTNIKÓW
 STUDENCKIE KOŁO NAUKOWE LOTNIKÓW SPRAWOZDANIE Z DZIAŁALNOŚCI ZA ROK 2011 1. Struktura Koła Naukowego: Opiekun naukowy: dr inż. Przemysław Mazurek Liczba członków: 15 osób Tematy zainteresowao koła naukowego:
STUDENCKIE KOŁO NAUKOWE LOTNIKÓW SPRAWOZDANIE Z DZIAŁALNOŚCI ZA ROK 2011 1. Struktura Koła Naukowego: Opiekun naukowy: dr inż. Przemysław Mazurek Liczba członków: 15 osób Tematy zainteresowao koła naukowego:
KNL/Melavio OSA WARSZAWA 2009
 KNL/Melavio OSA WARSZAWA 2009 SPIS TREŚCI 1. Zespół...3 2. Projekt koncepcyjny systemu...4 2.1. Opis realizacji misji...4 2.2. Wybór układu płatowca...4 2.3. Dobór głównych parametrów geometrycznych i
KNL/Melavio OSA WARSZAWA 2009 SPIS TREŚCI 1. Zespół...3 2. Projekt koncepcyjny systemu...4 2.1. Opis realizacji misji...4 2.2. Wybór układu płatowca...4 2.3. Dobór głównych parametrów geometrycznych i
KNL/Melavio OSA WARSZAWA 2008
 KNL/Melavio OSA WARSZAWA 2008 SPIS TREŚCI 1. Zespół 3 2. Projekt koncepcyjny systemu 4 2.1 Opis realizacji misji 4 2.2 Wybór układu płatowca 4 2.3 Dobór głównych parametrów geometrycznych i masowych 4
KNL/Melavio OSA WARSZAWA 2008 SPIS TREŚCI 1. Zespół 3 2. Projekt koncepcyjny systemu 4 2.1 Opis realizacji misji 4 2.2 Wybór układu płatowca 4 2.3 Dobór głównych parametrów geometrycznych i masowych 4
STUDENCKIE KOŁO ASTRONAUTYCZNE WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA POLITECHNIKA WARSZAWSKA PW-SAT2. Kamery Cameras
 STUDENCKIE KOŁO ASTRONAUTYCZNE WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA POLITECHNIKA WARSZAWSKA PW-SAT2 PRELIMINARY REQUIREMENTS REVIEW Kamery Cameras 1.0 PL Kategoria: Tylko do użytku 2014-04-07 Abstrakt
STUDENCKIE KOŁO ASTRONAUTYCZNE WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA POLITECHNIKA WARSZAWSKA PW-SAT2 PRELIMINARY REQUIREMENTS REVIEW Kamery Cameras 1.0 PL Kategoria: Tylko do użytku 2014-04-07 Abstrakt
Obiekt Latający: Model Paralotni z Napędem. Mateusz Lubecki Akademicki Klub Lotniczy PRz. (propozycja projektu do realizacji)
") Obiekt Latający: Model Paralotni z Napędem (propozycja projektu do realizacji) Mateusz Lubecki Akademicki Klub Lotniczy PRz Zastosowania Monitoring z powietrza dzięki zainstalowanej kamerze CCTV oraz nadajnikowi
Obiekt Latający: Model Paralotni z Napędem (propozycja projektu do realizacji) Mateusz Lubecki Akademicki Klub Lotniczy PRz Zastosowania Monitoring z powietrza dzięki zainstalowanej kamerze CCTV oraz nadajnikowi
CZARNO-BIAŁY KOLOROWY. pomocy ramki
 - zesta w wideodomofonu CZARNO-BIAŁY KOLOROWY H1001 319 pln H1010 550 pln zestaw domowego wideodomofonu i pobór mocy: 14 VA max. kamery wyświetlacz: 4 (10cm) CM-06DNRM/CM-06D temperatura pracy: 0 C do
- zesta w wideodomofonu CZARNO-BIAŁY KOLOROWY H1001 319 pln H1010 550 pln zestaw domowego wideodomofonu i pobór mocy: 14 VA max. kamery wyświetlacz: 4 (10cm) CM-06DNRM/CM-06D temperatura pracy: 0 C do
Instrukcja obsługi. Kamera wolnoobrotowa zewnętrzna PTZ-660EF. Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia.
 Instrukcja obsługi Kamera wolnoobrotowa zewnętrzna PTZ-660EF Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
Instrukcja obsługi Kamera wolnoobrotowa zewnętrzna PTZ-660EF Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
Zapytanie ofertowe Nr 02/01/2018
 Świdnik, dn. 31-01-2018r. AIR AGRO Sp. z o.o. ul. Sosnowa 9 05-080 Koczargi Stare Zapytanie ofertowe Nr 02/01/2018. Firma AIR AGRO Sp. z o.o. kieruje do Państwa zapytanie ofertowe i zaprasza do złożenia
Świdnik, dn. 31-01-2018r. AIR AGRO Sp. z o.o. ul. Sosnowa 9 05-080 Koczargi Stare Zapytanie ofertowe Nr 02/01/2018. Firma AIR AGRO Sp. z o.o. kieruje do Państwa zapytanie ofertowe i zaprasza do złożenia
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury. Czujniki stacjonarne.
 Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Czujniki podczerwieni do bezkontaktowego pomiaru temperatury Niemiecka firma Micro-Epsilon, której WObit jest wyłącznym przedstawicielem w Polsce, uzupełniła swoją ofertę sensorów o czujniki podczerwieni
Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego. Warszawa, wrzesień 2010 r.
 Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego Warszawa, wrzesień 2010 r. Firma Taxus SI Sp. z o.o. otrzymała wsparcie na prace badawcze i
Przykładowe opracowania fotogrametryczne uzyskane niemetrycznym aparatem cyfrowym z pokładu modelu latającego Warszawa, wrzesień 2010 r. Firma Taxus SI Sp. z o.o. otrzymała wsparcie na prace badawcze i
RSD Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle
 Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
Uniwersalny rejestrator danych pochodzących z portu szeregowego RS 232 Uniwersalny rejestrator danych Zaprojektowany do pracy w przemyśle - UNIWERSALNY REJESTRATOR DANYCH Max. 35 GB pamięci! to nowoczesne
GENERATOR ZNAKÓW OSD FG-50HD
 MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl GENERATOR ZNAKÓW OSD FG-50HD Produkt z kategorii: Specjalizowane sterowniki Cena:
MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl GENERATOR ZNAKÓW OSD FG-50HD Produkt z kategorii: Specjalizowane sterowniki Cena:
O NAS Firma AP AIRCRAFTS Sp. z o.o. została założona w 2018 roku, bazuje jednak na 30-letnim doświadczeniu w zakresie produkcji kompozytów.
 O NAS Firma AP AIRCRAFTS Sp. z o.o. została założona w 2018 roku, bazuje jednak na 30-letnim doświadczeniu w zakresie produkcji kompozytów. Produkuje wysokiej jakości kompozytowe elementy dla lotnictwa,
O NAS Firma AP AIRCRAFTS Sp. z o.o. została założona w 2018 roku, bazuje jednak na 30-letnim doświadczeniu w zakresie produkcji kompozytów. Produkuje wysokiej jakości kompozytowe elementy dla lotnictwa,
Bezprzewodowe systemy TV PAL ważny od: Ceny bez VAT
 Niezawodny produkt dla branży TV. Dzięki swoim parametrom ma szerokie zastosowania i umożliwia transmisję w dobrej rozdzielczości (PAL lub NTSC) z mobilnej kamery do 500m. Z systemem V-Link SD5 można zrealizować
Niezawodny produkt dla branży TV. Dzięki swoim parametrom ma szerokie zastosowania i umożliwia transmisję w dobrej rozdzielczości (PAL lub NTSC) z mobilnej kamery do 500m. Z systemem V-Link SD5 można zrealizować
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART
 MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
MOBOT-RCR v2 miniaturowe moduły radiowe Bezprzewodowa transmisja UART Własności MOBOT-RCR v2a: - pasmo komunikacji: ISM 433MHz lub 868MHz - zasięg 50m 300m * - zasilanie: z USB, - interfejs wyjściowy:
Bezzałogowy Statek Powietrzny typu Quadrotor. Emilian Magdziak Łukasz Borkowski
 Bezzałogowy Statek Powietrzny typu Quadrotor Emilian Magdziak Łukasz Borkowski Cel i założenia projektu Głównym celem projektu było stworzenie czterowirnikowej platformy latającej o jak największej stabilności
Bezzałogowy Statek Powietrzny typu Quadrotor Emilian Magdziak Łukasz Borkowski Cel i założenia projektu Głównym celem projektu było stworzenie czterowirnikowej platformy latającej o jak największej stabilności
Kamera szybkoobrotowa 540/660 linii, DZIEŃ/NOC, 23 X ZOOM, oświetlacz IR 6 diod o zasięgu do 80 m, HQ-SD5423-IR
 MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Kamera szybkoobrotowa 540/660 linii, DZIEŃ/NOC, 23 X ZOOM, oświetlacz IR 6 diod
MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Kamera szybkoobrotowa 540/660 linii, DZIEŃ/NOC, 23 X ZOOM, oświetlacz IR 6 diod
telewizja-przemyslowa.pl
 Informacje o produkcie Kamera Aper VCIR-720 Cena : 11.900,00 zł (netto) 14.637,00 zł (brutto) Producent : Aper Dostępność : Dostępny Stan magazynowy : brak w magazynie Średnia ocena : brak recenzji Utworzono
Informacje o produkcie Kamera Aper VCIR-720 Cena : 11.900,00 zł (netto) 14.637,00 zł (brutto) Producent : Aper Dostępność : Dostępny Stan magazynowy : brak w magazynie Średnia ocena : brak recenzji Utworzono
Prezes Fundacji: Tomasz Czekajło Wiceprezes Fundacji: Tomasz Gałek
 Fundacja podjęła się bardzo trudnego zadania - budowy LATAJĄCEJ repliki samolotu, który jest jedną z lotniczych ikon Polski okresu międzywojennego, jest legendą polskiego lotnictwa wojskowego. Zależy nam
Fundacja podjęła się bardzo trudnego zadania - budowy LATAJĄCEJ repliki samolotu, który jest jedną z lotniczych ikon Polski okresu międzywojennego, jest legendą polskiego lotnictwa wojskowego. Zależy nam
ZAPYTANIE OFERTOWE. Dęblin, dnia 28 kwietnia 2014
 WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. (81) 551 74 55; fax (81) 551 74 52 Dęblin, dnia 28 kwietnia 2014 ZAPYTANIE
WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. (81) 551 74 55; fax (81) 551 74 52 Dęblin, dnia 28 kwietnia 2014 ZAPYTANIE
ODPOWIEDZI NA PYTANIA DO SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA ORAZ ZAWIADOMIENIE O ZMIANIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA
 Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
DOKUMENT INFORMACYJNY. Swiftsky
 DOKUMENT INFORMACYJNY Kim jesteśmy? Swi sky jest projektem rozwijanym pod skrzydłami Akademickiego Inkubatora Przedsiębiorczości Politechniki Poznańskiej. Naszym celem jest rozwój i prawdziwa autonomia
DOKUMENT INFORMACYJNY Kim jesteśmy? Swi sky jest projektem rozwijanym pod skrzydłami Akademickiego Inkubatora Przedsiębiorczości Politechniki Poznańskiej. Naszym celem jest rozwój i prawdziwa autonomia
Budowa i zasada działania skanera
 Budowa i zasada działania skanera Skaner Skaner urządzenie służące do przebiegowego odczytywania: obrazu, kodu paskowego lub magnetycznego, fal radiowych itp. do formy elektronicznej (najczęściej cyfrowej).
Budowa i zasada działania skanera Skaner Skaner urządzenie służące do przebiegowego odczytywania: obrazu, kodu paskowego lub magnetycznego, fal radiowych itp. do formy elektronicznej (najczęściej cyfrowej).
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Kraków, dn ZAPYTANIE OFERTOWE (data i podpis)
") Kraków, dn. 18.06.2019 ZAPYTANIE OFERTOWE Simpro sp. z o.o. zaprasza do składania ofert na dostawę sprzętu - dwie platformy UAV płatowiec i wielowirnikowiec, wg wymagań zawartych w załączonym Opisie Przedmiotu
Kraków, dn. 18.06.2019 ZAPYTANIE OFERTOWE Simpro sp. z o.o. zaprasza do składania ofert na dostawę sprzętu - dwie platformy UAV płatowiec i wielowirnikowiec, wg wymagań zawartych w załączonym Opisie Przedmiotu
PR-9 TUKAN BEZZAŁOGOWY APARAT LATAJĄCY DOKUMENTACJA TECHNICZNA
 Studenckie Koło naukowe Lotników Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Ul. Powstańców Warszawy 8 35-959 Rzeszów BEZZAŁOGOWY APARAT LATAJĄCY PR-9 TUKAN DOKUMENTACJA TECHNICZNA Spis treści
Studenckie Koło naukowe Lotników Politechnika Rzeszowska Wydział Budowy Maszyn i Lotnictwa Ul. Powstańców Warszawy 8 35-959 Rzeszów BEZZAŁOGOWY APARAT LATAJĄCY PR-9 TUKAN DOKUMENTACJA TECHNICZNA Spis treści
Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba.
 Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba. Wklejamy wzmocnienia łoża płata oraz wzmocnienie mocowania serwomechanizmów do ścianki bocznej kadłuba. Wklejamy wręgi
Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba. Wklejamy wzmocnienia łoża płata oraz wzmocnienie mocowania serwomechanizmów do ścianki bocznej kadłuba. Wklejamy wręgi
INSTRUKCJA OBSŁUGI. Kamera PTZ zewnętrzna PTZ-715WP
 INSTRUKCJA OBSŁUGI Kamera PTZ zewnętrzna PTZ-715WP 1. Podłączenie kamery Z kamery zostały wyprowadzone trzy przewody: 1) Port RS-485: fioletowy (czerwony): RS485 + szary (czarny): RS485-2) Sygnał video
INSTRUKCJA OBSŁUGI Kamera PTZ zewnętrzna PTZ-715WP 1. Podłączenie kamery Z kamery zostały wyprowadzone trzy przewody: 1) Port RS-485: fioletowy (czerwony): RS485 + szary (czarny): RS485-2) Sygnał video
Stanowisko do badania współczynnika tarcia
 Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Stanowisko do badania współczynnika tarcia Grzegorz Sejnota SKN Spektrum Zakład Pomiarów i Systemów Sterowania Wydział Automatyki, Elektroniki i Informatyki Politechnika Śląska, Gliwice 12 Kwietnia 2010
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia
 Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
Szczegółowy opis przedmiotu zamówienia
 Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Załącznik 2. System kamer obserwacji z przodu pojazdu UGV. (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6.
 Krótka specyfikacja WP6.") Załącznik 2 System kamer obserwacji z przodu pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 4 1.1. WPROWADZENIE 4 1.2. Przeznaczenie
Załącznik 2 System kamer obserwacji z przodu pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 4 1.1. WPROWADZENIE 4 1.2. Przeznaczenie
Wymagania techniczne - Laser Tracker wersja przenośna
 Wymagania techniczne - Laser Tracker wersja przenośna 1. Wymagania minimalne Laser Trackera Zakres pomiarowy co najmniej 40m Zakres pracy w temperaturach -10 45 Zasięg poziomy >±300 Zasięg pionowy> +75,>
Wymagania techniczne - Laser Tracker wersja przenośna 1. Wymagania minimalne Laser Trackera Zakres pomiarowy co najmniej 40m Zakres pracy w temperaturach -10 45 Zasięg poziomy >±300 Zasięg pionowy> +75,>
Warszawa, dnia 23 lutego 2015 r. Poz. 3
 Warszawa, dnia 23 lutego 2015 r. Poz. 3 DECYZJA Nr 13 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 23 lutego 2015 r. w sprawie wprowadzenia do stosowania Raportu Uznania Wiedzy Na podstawie art. 21 ust. 2
Warszawa, dnia 23 lutego 2015 r. Poz. 3 DECYZJA Nr 13 PREZESA URZĘDU LOTNICTWA CYWILNEGO z dnia 23 lutego 2015 r. w sprawie wprowadzenia do stosowania Raportu Uznania Wiedzy Na podstawie art. 21 ust. 2
POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny
 POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny Marcin Grodzki Projekt koncepcyjny bezzałogowego aparatu latającego w układzie łodzi latającej Promotor: dr inż. Andrzej Łukaszewicz Założenia misji Minimalny
POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny Marcin Grodzki Projekt koncepcyjny bezzałogowego aparatu latającego w układzie łodzi latającej Promotor: dr inż. Andrzej Łukaszewicz Założenia misji Minimalny
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV
 Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA
 WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
WIZUALIZACJA DANYCH SENSORYCZNYCH MINISTACJA METEOROLOGICZNA Prowadzący: dr inż. Bogdan Kreczmer Autor: Jakub Malewicz Wrocław, 15 VI 2007 SPIS TREŚCI 1. WSTĘP 3 2. DANE STACJI 3 3. SCHEMAT IDEOWY 4 4.
DOKUMENTACJA TECHNICZNA
 Studenckie Koło naukowe Lotników Politechnika Rzeszowska Wydział Budowy maszyn i lotnictwa Ul. Powstańców Warszawy8, 35-959 Rzeszów Bezzałogowy Aparat Latający PR-5 Wiewiór + DOKUMENTACJA TECHNICZNA Spis
Studenckie Koło naukowe Lotników Politechnika Rzeszowska Wydział Budowy maszyn i lotnictwa Ul. Powstańców Warszawy8, 35-959 Rzeszów Bezzałogowy Aparat Latający PR-5 Wiewiór + DOKUMENTACJA TECHNICZNA Spis
AUTOMATYKA DO BRAM Cennik WAŻNY OD
 AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
Make: Drony dla początkujących
 Terry Kilby Belinda Kilby Make: Drony dla początkujących Przekład: Maria Chaniewska APN Promise 2016 Spis treści Przedmowa.......................................................... vii 1 Wstęp..............................................................
Terry Kilby Belinda Kilby Make: Drony dla początkujących Przekład: Maria Chaniewska APN Promise 2016 Spis treści Przedmowa.......................................................... vii 1 Wstęp..............................................................
SYSTEM ARANET KATALOG PRODUKTÓW
 SYSTEM ARANET KATALOG PRODUKTÓW 1. Opis systemu Aranet to system monitorowania parametrów środowiskowych. Urządzenia wchodzące jego skład mogą mierzyć następujące wielkości: Temperatura Wilgotność względna
SYSTEM ARANET KATALOG PRODUKTÓW 1. Opis systemu Aranet to system monitorowania parametrów środowiskowych. Urządzenia wchodzące jego skład mogą mierzyć następujące wielkości: Temperatura Wilgotność względna
Instrukcja obsługi. Kamera wolnoobrotowa zewnętrzna PTZ-660EF. Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia.
 Instrukcja obsługi Kamera wolnoobrotowa zewnętrzna PTZ-660EF Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
Instrukcja obsługi Kamera wolnoobrotowa zewnętrzna PTZ-660EF Dane techniczne oraz treść poniższej instrukcji mogą ulec zmianie bez uprzedzenia. Odbiornik zgodny jest z warunkami dyrektywy 89/336/EEC dotyczącej
KAMERY DO INSPEKCJI ŚCIAN I RUR
 KAMERY DO INSPEKCJI ŚCIAN I RUR Wopson International (Hong Kong)., Ltd Shenzhen Wopson Electrical Co., Ltd Spis treści Kamery do inspekcji kanalizacji i rurociągów Lokalizatory Kamery do inspekcji studni
KAMERY DO INSPEKCJI ŚCIAN I RUR Wopson International (Hong Kong)., Ltd Shenzhen Wopson Electrical Co., Ltd Spis treści Kamery do inspekcji kanalizacji i rurociągów Lokalizatory Kamery do inspekcji studni
Zdalny czujnik. Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009
 Wrocław, 12 czerwca 2009") Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
Zdalny czujnik Adam Zugaj Wydział Elektroniki, PWr IV rok, AiR (ARR) Wrocław, 12 czerwca 2009 Dokument został stworzony w ramach kursu Wizualizacja danych sensorycznych, prowadzonego przez dra inż. Bogdana
Programowanie Układów Logicznych kod kursu: ETD6203. Szczegóły realizacji projektu indywidualnego W dr inż.
 Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Programowanie Układów Logicznych kod kursu: ETD6203 Szczegóły realizacji projektu indywidualnego W1 24.02.2016 dr inż. Daniel Kopiec Projekt indywidualny TERMIN 1: Zajęcia wstępne, wprowadzenie TERMIN
Bezzałogowy Statek Latający CHIP-5 PCV. Dokumentacja techniczna
 Studenckie Koło Naukowe CHIP Politechnika Gdańska Wydział Elektroniki Telekomunikacji i Informatyki Bezzałogowy Statek Latający CHIP-5 PCV Dokumentacja techniczna Spis treści 1. Wprowadzenie... 4 1.1 O
Studenckie Koło Naukowe CHIP Politechnika Gdańska Wydział Elektroniki Telekomunikacji i Informatyki Bezzałogowy Statek Latający CHIP-5 PCV Dokumentacja techniczna Spis treści 1. Wprowadzenie... 4 1.1 O
RAMOWY PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA NA KIERUNKU LOTNICTWO I KOSMONAUTYKA RW. Rzeszów r.
 Rzeszów 19.12.2012 r. RAMOWY PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA NA KIERUNKU LOTNICTWO I KOSMONAUTYKA RW. Rzeszów 11.04.2012 r. Semestr 1 FF Fizyka 1 E 25 20 0 0 5 MK Grafika inżynierska i zapis konstr.
Rzeszów 19.12.2012 r. RAMOWY PLAN STUDIÓW NIESTACJONARNYCH I STOPNIA NA KIERUNKU LOTNICTWO I KOSMONAUTYKA RW. Rzeszów 11.04.2012 r. Semestr 1 FF Fizyka 1 E 25 20 0 0 5 MK Grafika inżynierska i zapis konstr.
MiniModbus 4DO. Moduł rozszerzający 4 wyjścia cyfrowe. Wyprodukowano dla. Instrukcja użytkownika
 Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Wersja 1.1 Wyprodukowano dla Dziękujemy za wybór naszego produktu. Niniejsza instrukcja ułatwi Państwu prawidłową obsługę i poprawną eksploatację opisywanego urządzenia. Informacje zawarte w niniejszej
Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie
 Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie Samolot Lublin R-VIII (1928) - samolot oraz wodnosamolot rozpoznawczo-bombowy Konstrukcja: Jednosilnikowy dwupłat o konstrukcji drewnianej. Wodnosamolot
Zakłady mechaniczne E. Plage i T. Laśkiewicz w Lublinie Samolot Lublin R-VIII (1928) - samolot oraz wodnosamolot rozpoznawczo-bombowy Konstrukcja: Jednosilnikowy dwupłat o konstrukcji drewnianej. Wodnosamolot
Kod produktu: MP01611
 CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
CZYTNIK RFID ZE ZINTEGROWANĄ ANTENĄ, WYJŚCIE RS232 (TTL) Moduł stanowi tani i prosty w zastosowaniu czytnik RFID dla transponderów UNIQUE 125kHz, umożliwiający szybkie konstruowanie urządzeń do bezstykowej
projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania;
 PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
PRZYGOTOWAŁ: KIEROWNIK PRACY: MICHAŁ ŁABOWSKI dr inż. ZDZISŁAW ROCHALA projekt przetwornika inteligentnego do pomiaru wysokości i prędkości pionowej BSP podczas fazy lądowania; dokładny pomiar wysokości
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
POLSL HF-1 Orzeł. MIWL Bezmiechowa 2012 Politechnika Śląska - High Flyers
 POLSL HF-1 Orzeł MIWL Bezmiechowa 2012 Politechnika Śląska - High Flyers Plan prezentacji Wstęp Międzywydziałowe Koło Naukowe High Flyers Zespół projektowy Autopilot Naziemna Stacja Kontroli Lotu Testy
POLSL HF-1 Orzeł MIWL Bezmiechowa 2012 Politechnika Śląska - High Flyers Plan prezentacji Wstęp Międzywydziałowe Koło Naukowe High Flyers Zespół projektowy Autopilot Naziemna Stacja Kontroli Lotu Testy
Wirtualne przyrządy kontrolno-pomiarowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
Laboratorium Napędu Robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu Robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA Celem
Specyfikacja techniczna obrabiarki. wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40
 Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Specyfikacja techniczna obrabiarki wersja 2013-02-03, wg. TEXT VMX42 U ATC40-05 VMX42 U ATC40 KONSTRUKCJA OBRABIARKI HURCO VMX42 U ATC40 Wysoka wytrzymałość mechaniczna oraz duża dokładność są najważniejszymi
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Warszawska PW OSA. Bezzałogowy Statek Latający opracowany przez studentów Politechniki Warszawskiej
 Politechnika Warszawska Bezzałogowy Statek Latający opracowany przez studentów Politechniki Warszawskiej Warszawa 2011 Rozdział: Spis treści 1 Wprowadzenie... 4 1.1 Historia... 4 1.2 Zespół... 4 1.3 Kontakt...
Politechnika Warszawska Bezzałogowy Statek Latający opracowany przez studentów Politechniki Warszawskiej Warszawa 2011 Rozdział: Spis treści 1 Wprowadzenie... 4 1.1 Historia... 4 1.2 Zespół... 4 1.3 Kontakt...
Dlaczego MP-02 Czajka?
 tel.504 675 694 Dlaczego MP-02 Czajka? Unikalna aerodynamika i bardzo dobre właściwości lotne, ergonomiczna i nienagannie wyciszona kabina, znakomita amortyzacja podwozia, wygodne regulowane fotele. Duża
tel.504 675 694 Dlaczego MP-02 Czajka? Unikalna aerodynamika i bardzo dobre właściwości lotne, ergonomiczna i nienagannie wyciszona kabina, znakomita amortyzacja podwozia, wygodne regulowane fotele. Duża
Przyjazny układ sterowania dla samolotów w lekkich
 POLITECHNIKA RZESZOWSKA im. I. ŁUKASIEWICZA Katedra Awioniki i Sterowania Stan obecny i perspektywy zastosowania: Przyjazny układ sterowania dla samolotów w lekkich Katedra Awioniki i Sterowania PRz Projektowanie
POLITECHNIKA RZESZOWSKA im. I. ŁUKASIEWICZA Katedra Awioniki i Sterowania Stan obecny i perspektywy zastosowania: Przyjazny układ sterowania dla samolotów w lekkich Katedra Awioniki i Sterowania PRz Projektowanie
Mini kamera bezprzewodowa 2,4 GHz 380 linii, 803T
 MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Mini kamera bezprzewodowa 2,4 GHz 380 linii, 803T Produkt z kategorii: Kamery bezprzewodowe
MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Mini kamera bezprzewodowa 2,4 GHz 380 linii, 803T Produkt z kategorii: Kamery bezprzewodowe
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej
 Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Projekt sterowania turbiną i gondolą elektrowni wiatrowej na farmie wiatrowej z wykorzystaniem sterownika PLC Treść zadania Program ma za zadanie sterować turbiną elektrowni wiatrowej, w zależności od
Światłowodowa wycinarka laserowa LYNX FL OPŁACALNA OBRÓBKA LASEROWA
 Światłowodowa wycinarka laserowa LYNX FL OPŁACALNA OBRÓBKA LASEROWA LVDGROUP.COM LYNX FL OPŁACALNA OBRÓBKA LASEROWA Lynx FL łączy doskonałą jakość cięcia z elastycznością, poddając obróbce szeroką gamę
Światłowodowa wycinarka laserowa LYNX FL OPŁACALNA OBRÓBKA LASEROWA LVDGROUP.COM LYNX FL OPŁACALNA OBRÓBKA LASEROWA Lynx FL łączy doskonałą jakość cięcia z elastycznością, poddając obróbce szeroką gamę
SL 200-300. bramy przesuwne
 0 bramy przesuwne cancelli scorrevoli SL 00-00 Dane techniczne SL SL użytkowanie częstotliwość użytkowania zasilanie napędu pobór mocy stopień ochrony prędkość max moment obrotowy nominalny moment obrotowy
0 bramy przesuwne cancelli scorrevoli SL 00-00 Dane techniczne SL SL użytkowanie częstotliwość użytkowania zasilanie napędu pobór mocy stopień ochrony prędkość max moment obrotowy nominalny moment obrotowy
Karta DVR 4 kanały + 4 kamery CCTV CCD - SUPER CENA
 MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Karta DVR 4 kanały + 4 kamery CCTV CCD - SUPER CENA Produkt z kategorii: Zestawy
MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl Karta DVR 4 kanały + 4 kamery CCTV CCD - SUPER CENA Produkt z kategorii: Zestawy
BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH
 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology ZASTĘPCA DYREKTORA ITWL PROF. DR HAB. INŻ. ANDRZEJ ŻYLUK BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH May 16, 2016 POLSKIE OŚRODKI
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology ZASTĘPCA DYREKTORA ITWL PROF. DR HAB. INŻ. ANDRZEJ ŻYLUK BEZZAŁOGOWE STATKI POWIETRZNE DLA SIŁ ZBROJNYCH May 16, 2016 POLSKIE OŚRODKI