Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów
|
|
|
- Kamila Bielecka
- 8 lat temu
- Przeglądów:
Transkrypt
1 BSL-X1 Projekt Wstępny Bezzałogowego Systemu Latającego BSL X1 Koło Naukowe EUROAVIA Rzeszów 07 08

2 I. Opis systemu BSL X1 W skład bezzałogowego systemu latającego BSL X1, wchodzą następujące części: stacja naziemna przystosowana do planowania misji, sterowania zdalnego oraz odbioru obrazu wideo z aparatu latającego w czasie rzeczywistym. W jej skład wchodzą: komputer planowania i nadzoru misji, komputer obserwacji oraz zespół odbiornika nadajnika WiFi i anteny. aparat latający, przystosowany do zbierania informacji na potrzeby wykonania misji oraz wyposażony w systemy umożliwiające wykonywanie misji. II. Opis systemów 1. Stacja naziemna: Komputer planowania i nadzoru misji Jego zadaniem jest zaprojektowanie planu nawigacyjnego i graficzna reprezentacja jego realizacji na mapie. Ponadto zapewnia wyświetlanie danych o położeniu w przestrzeni i prędkości. Komputer obserwacji Jego zdaniem jest odbieranie obrazu z kamer wideo zainstalowanych na pokładzie aparatu latającego. Ponadto zapewnia możliwość sterowania nimi i opcjonalne wysyłanie obrazu do sieci Internet. Zespół odbiornika WiFi i anteny Obraz z kamer jest przesyłana za pomocą technologii WiFi, w skład zespołu wchodzi router i antena kierunkowa z mechanizmem śledzącym aparat latający. Katapulta Z racji rozmiarów i wagi aparatu latającego, do startu używana jest katapulta z napędem gumowym. 2

3 2. Aparat latający System zasilania W jego skład wchodzą: baterie litowo polimerowe o napięciu 22.2 V do zasilania zespołu napędowego, baterie litowo polimerowe o napięciu 11.1 V do zasilania systemów nawigacyjnego oraz obserwacyjnego, baterie niklowo wodorkowe o napięciu 4.8 V do zasilania awaryjnego mechanizmów wykonawczych. System nawigacyjny W jego skład wchodzą: autopilot z zintegrowanymi czujnikami położenia przestrzennego samolotu i odbiornikiem GPS, czujniki ciśnienia statycznego i dynamicznego moduł nadawczo odbiorczy z interfejsem ZigBee. Opis działania Dane nawigacyjne są przesyłane do stacji naziemnej poprzez moduł, gdzie są prezentowane operatorowi. W czasie lotu można zmieniać plan nawigacyjny i przesyłać go do autopilota. System obserwacyjny W jego skład wchodzą: kamera analogowa o rozdzielczości 420TVL z 27 krotnym powiększeniem optycznym, kamera analogowa o rozdzielczości 600 TVL, dwu kanałowy wideo serwer przesyłający sygnał wideo, moduł nadawczo odbiorczym z interfejsem WiFi, układ OSD, konsola kamery ze stabilizacją mechaniczną, komputer pokładowy do stabilizacji i sterowania kamerą, moduł nadawczo odbiorczy z interfejsem ZigBee. 3

4 Opis działania Kamera z powiększeniem zamontowana jest w konsoli stabilizującej obraz, istnieje możliwość obrotu kamery w osiach horyzontalnej oraz podłużnej. Stabilizacja jest wykonana na komputerze pokładowym pobierającym dane o położeniu przestrzennym z autopilota, a następnie sterującym serwomechanizmami konsoli, w której umieszczona jest kamera. Jej zadaniem jest umożliwienie operatorowi dokładnego zlokalizowania poszukiwanych obiektów. Sterowanie kamerą ze stacji naziemnej jest zapewnione poprzez komunikację za pośrednictwem łącza ZigBee. Kamera bez stabilizacji zamontowana jest w dziobie kadłuba w osi podłużnej i nie ma możliwości jej sterowania, w jej torze wideo jest wpięty układ on screen vsion, prezentujący dane nawigacyjne (położenie przestrzenne, prędkość, kurs itp.) na tle obrazu z kamery. Obydwie kamery zostały podłączone do wideo serwera, który za pośrednictwem modułu WiFi przesyła obraz w formacie H.264 do komputera obserwacyjnego przez router WiFi lub opcjonalnie bezpośrednio poprzez moduł technologii 3G sieci komórkowej, a następnie przez sieć Internet do stacji naziemnej, co znacznie zwiększa operacyjny promień działania systemu BSL X1. Rys. 1 Położenie kamer 4

5 Rys. 2 Schemat systemu obserwacyjnego System napędowy W jego skład wchodzą: silnik elektryczny o mocy około 900 W, regulator silnika oraz składane śmigło. Opis Silnik został umieszczony w tyle kadłuba i wraz ze śmigłem działa w konfiguracji pchającej. Zasilany jest z baterii o napięciu 22.2 V, co obniża straty mocy na połączeniach. Dzięki konfiguracji pchającej pracujące śmigło nie pogarsza jakości obrazu kamer umieszczonych z przodu, a ponadto skrzydła pracują w niezakłóconym opływie a ich konstrukcja jest uproszczona w stosunku do rozwiązania z gondolami silnikowymi na skrzydłach. System płatowca W jego skład wchodzą: cztero częściowe skrzydło, kadłub sworznie i bagnety łączące. 5

6 Opis Dzięki zastosowaniu konstrukcji kompozytowej zarówno skrzydła jak i kadłub są bardzo wytrzymałe i zapewniają stabilną platformę do montażu pozostałych systemów. Konfiguracja latającego skrzydła o dużym wydłużeniu zapewnia dobre osiągi, oszczędność energii i prostotę konstrukcji. Cztery płaszczyzny sterowe zapewniają dobrą sterowność i możliwość zmiany ich konfiguracji w locie. Rys. 3 Struktura płatowca System ratunkowy W jego skład wchodzą: spadochron z pilocikiem i linkami mechanizm wyzwalający Opis działania Lądowanie aparatu latającego odbywa się na spadochronie, działa on również w sytuacjach awaryjnych (np. utrata sterowania itp.). Kształt czaszy spadochronu dobrano na podstawie symulacji komputerowych i badań na modelach, do uszycia użyto oryginalnego materiału na spadochrony. Układ jest wyzwalana za pomocą mechanizmu opartego na serwie, które uchyla pokrywę spadochronu a strugi powietrza otwierają ją, wyciągając jednocześnie spadochron. 6

7 Rys. 4 Przykładowa analiza CFD czaszy III. Zespół projektowy i zakres prac Stworzenie grupy roboczej nastąpiło w kwietniu r, w następstwie powstania koncepcji budowy bezzałogowego systemu latającego w ramach działalności Koła Naukowego EUROAVIA Rzeszów. W skład zespołu projektowego wchodzą: Opiekun mgr. inż. Damian Kordos 1. Michał Wrząchal (IV rok inż., spec. płatowce) projekt wstępny i techniczny płatowca, budowa płatowca, zarządzanie projektem. 2. Jakub Rogóż (IV rok inż., spec. awionika, III rok, spec. pilotaż) technolog, projekt wyposażenia, budowa płatowca, pilot 3. Karol Krzysztoszek (II rok mgr., spec. awionika) stabilizacja i sterowanie kamerą 4. Marta Szołodrowska (III rok inż., spec. awionika) stabilizacja i sterowanie kamerą 5. Adam Sawicki (II rok mgr., spec. awionika) instalacja i strojenie autopilota 6. Michał Częczek (II rok mgr., spec. awionika) instalacja i strojenie autopilota 7. Mateusz Lubas (III rok inż., spec. płatowce) antena śledząca, przesył danych 8. mgr. inż. Jakub Lubas antena śledząca, przesył danych 9. Karol Wieczorek (III rok inż., spec awionika) antena śledząca, przesył danych 10. Rafał Partyka (III rok inż., spec. pilotaż) projekt systemu ratunkowego i katapulty 11. Maria Wantusiak (III rok inż., spec. pilotaż) projekt katapulty 12. Inż. Krzysztof Pietraszek (II rok mgr. spec. awionika) projekt czujnika kąta natarcia i ślizgu 7
 projekt wstępny i techniczny płatowca, budowa płatowca, zarządzanie projektem. 2. Jakub Rogóż (IV rok inż., spec. awionika, III rok, spec.")
8 IV. Planowane działania Poniżej przedstawiono schematycznie etapy prac nad projektem, a w dalszej części znajduje się harmonogram prac, wraz z zaznaczeniem stopnia ich zaawansowania. Etap 1 Koncepcja systemu Wstępne zwymiarowanie elementów Optymalizacja płatowca i obliczenia wstępne Etap 2 Zdefiniowanie systemów pokładowych i naziemnych Budowa modelu 3D projekt wstępny Etap 3 obliczenia sprawdzające, analizy rysunki konstrukcyjne i wykonawcze projekt techniczny budowa prototypu Etap 4 badania w locie analiza osiągów i operacyjności ulepszenia 8

9 14 March 28 March 11 April 25 April 9 May 23 May 6 June 20 June 4 July 18 July 1 August 15 August 29 August 12 September 26 September 10 October 1. Struktury 87% 1.1 Projkt Koncepcyjny 100% 1.2 Projekt Techniczny 100% 1.3 Budowa 60% Skrzydła 100% Kadłub 20% 2. Awionika 67% 2.1 Autopilot 75% 2.2 Transmisja wideo i OSD 60% 2.3 Stabilicacja kamery i śledzenie 40% 2.4 Antena kierunkowa 60% 2.5 Elementy wykonawcze, silnik 100% 2.6 Wykończenie przyczepy 3. Systemy startu i lądowania 30% 3.1 Katapulta 0% 3.2 System ratunkowy 60% 4. Skrzynia ładunkowa i logistyka 0% 5. Elemnty konkursu 0% 5.1 Przygotowanie dokumentacji 0% 5.2 Zawody 0%

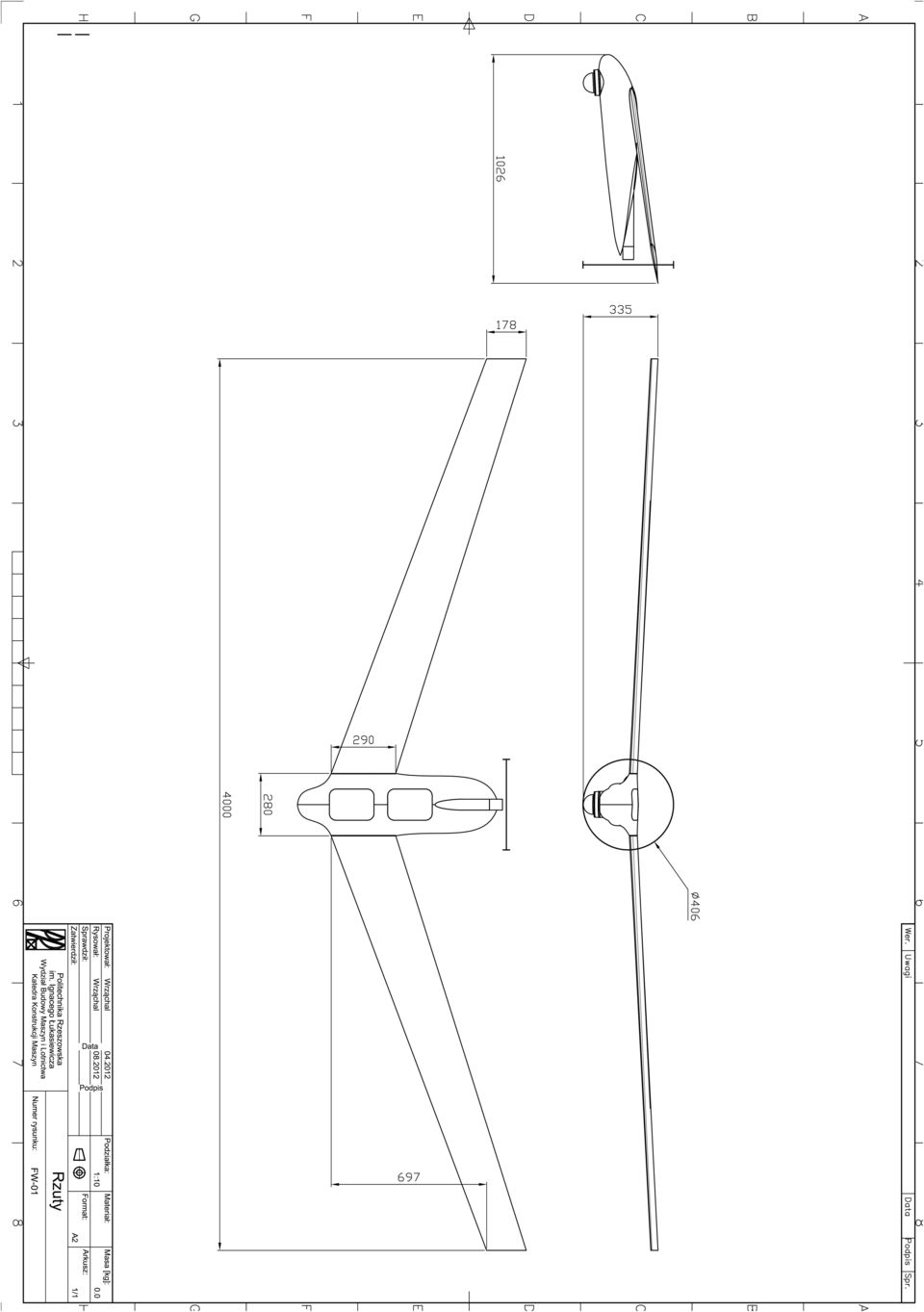
10 V. Kosztorys 1. Spodziewane wydatki Cel Koszt [PLN] Konstrukcja 4500 Wyposażenie 4300 Układ sterowania i zasilania 4100 Elementy dodatkowe 400 Suma Środki na finansowanie Źródło Kwota [PLN] Termin dostępności Dziekan WBMiL Fundacja Rozwoju PRz 2000 Wrzesień Sponsorzy 4000 W trakcie poszukiwań Razem VI. Załączniki 1. Rysunek izometryczny 2. Rysunki gabarytowe 3. Wykaz używanych częstotliwości 10

11
12
13 Wykaz stosowanych częstotliwości: Interfejs ZigBee 2,4 GHz Interfejs WiFi 2,4 GHz Aparatura do sterowania aparatem latającym 2,4 Ghz

BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012
 BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
BEZZAŁOGOWY STATEK POWIETRZNY PW OSA 2012 2 AGENDA 1. Członkowie projektu 2. Cel projektu, wymagania, założenia, misja 3. Wstępne założenia 4. Płatowiec 1. Wybór 2. Obliczenia aerodynamiczne, strukturalne
STUDENCKIE KOŁO NAUKOWE CHIP
 STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
STUDENCKIE KOŁO NAUKOWE CHIP Katedra Systemów Mikroelektronicznych Wydział Elektroniki, Telekomunikacji i Informatyki Politechnika Gdańska 1. Wstęp Zaprojektowany obiekt latający to motoszybowiec z napędem
Krzysztof Płatek, Marcel Smoliński
 Krzysztof Płatek, Marcel Smoliński Samolot udźwigowy na zawody Air Cargo 2015 Stuttgart ukończenie: sierpień 2015 Prototyp samolotu solarnego SOLARIS ukończenie: wrzesień 2015 Prototyp samolotu dalekiego
Krzysztof Płatek, Marcel Smoliński Samolot udźwigowy na zawody Air Cargo 2015 Stuttgart ukończenie: sierpień 2015 Prototyp samolotu solarnego SOLARIS ukończenie: wrzesień 2015 Prototyp samolotu dalekiego
Dęblin, dnia r.
 WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. 261 519 464; fax.: 261 517 452 Dęblin, dnia 17.07.2015 r. ZAPYTANIE
WYŻSZA SZKOŁA OFICERSKA SIŁ POWIETRZNYCH www.wsosp.pl PION KANCLERZA Dział Organizacyjny 08-521 Dęblin, ul. 2 Pułku Kraków Nr 22 tel. 261 519 464; fax.: 261 517 452 Dęblin, dnia 17.07.2015 r. ZAPYTANIE
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE
 WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
WIELOFUNKCYJNY SYSTEM BEZZAŁOGOWY BIRDIE PLAN FLY CREATE SYSTEM BEZZAŁOGOWY BIRDIE System BIRDIE to unikalna i wielofunkcyjna platforma bezzałogowa szerokiego przeznaczenia. Połączenie nowoczesnych, zminiaturyzowanych
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF
 DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
DRON - PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF Cena na zapytanie Profesjonalny, zaawansowany bezzałogowy system "GRYF" przeznaczony głównie dla służb mundurowych. Categories: Drony, POLECANE PRODUCT DESCRIPTION
Bezzałogowy samolot rozpoznawczy Mikro BSP
 Bezzałogowy samolot rozpoznawczy Mikro BSP Konrad Warnicki Tomasz Wnuk Opiekun pracy: dr. Andrzej Ignaczak Kierownik pracy: dr. Ryszard Kossowski Projekt bezzałogowego samolotu rozpoznawczego Konsorcjum:
Bezzałogowy samolot rozpoznawczy Mikro BSP Konrad Warnicki Tomasz Wnuk Opiekun pracy: dr. Andrzej Ignaczak Kierownik pracy: dr. Ryszard Kossowski Projekt bezzałogowego samolotu rozpoznawczego Konsorcjum:
PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE
 PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE System bezzałogowy Fenix System FENIX to nowoczesna i wielofunkcyjna platforma bezzałogowa oparta na zminiaturyzowanych podzespołach oraz sprawdzonych
PROFESJONALNY SYSTEM BEZZAŁOGOWY FENIX PLAN FLY CREATE System bezzałogowy Fenix System FENIX to nowoczesna i wielofunkcyjna platforma bezzałogowa oparta na zminiaturyzowanych podzespołach oraz sprawdzonych
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia
 Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
Platformy bezzałogowe jako element sieciocentrycznego systemu dowodzenia dr inż. Mikołaj Sobczak sobczak@mobile.put.poznan.pl Mobilny system sieciocentryczny BSP BURZYK BSP BURZYK SYSTEM ŁĄCZNOŚCI PODSYSTEM
Skład zespołu SKNL. Maciej Dubiel student 3go MDLiK, specjalność Płatowce. Grzegorz Łobodziński student 3go MDLiK, specjalność Awionika
 Skład zespołu SKNL Maciej Dubiel student 3go MDLiK, specjalność Płatowce Grzegorz Łobodziński student 3go MDLiK, specjalność Awionika Błażej Morawski student 3go MDLiK, specjalność Płatowce Maciej Roga
Skład zespołu SKNL Maciej Dubiel student 3go MDLiK, specjalność Płatowce Grzegorz Łobodziński student 3go MDLiK, specjalność Awionika Błażej Morawski student 3go MDLiK, specjalność Płatowce Maciej Roga
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]](/thumbs/59/43314735.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008]") Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Uwagi do regulaminu proszę przesyłać na adres: miwl@smil.org.pl Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2008] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do
Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki Lotnicze,
 Członkowie Koła Naukowego Lotników: Maciej Dubiel student 4go MDLiK, specjalność Płatowce, Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki
Członkowie Koła Naukowego Lotników: Maciej Dubiel student 4go MDLiK, specjalność Płatowce, Grzegorz Łobodziński student 4go MDLiK, specjalność Awionika, Maciej Roga student 5go MDL, specjalność Silniki
POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny
 POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny Marcin Grodzki Projekt koncepcyjny bezzałogowego aparatu latającego w układzie łodzi latającej Promotor: dr inż. Andrzej Łukaszewicz Założenia misji Minimalny
POLITECHNIKA BIAŁOSTOCKA Wydział Mechaniczny Marcin Grodzki Projekt koncepcyjny bezzałogowego aparatu latającego w układzie łodzi latającej Promotor: dr inż. Andrzej Łukaszewicz Założenia misji Minimalny
Make: Drony dla początkujących
 Terry Kilby Belinda Kilby Make: Drony dla początkujących Przekład: Maria Chaniewska APN Promise 2016 Spis treści Przedmowa.......................................................... vii 1 Wstęp..............................................................
Terry Kilby Belinda Kilby Make: Drony dla początkujących Przekład: Maria Chaniewska APN Promise 2016 Spis treści Przedmowa.......................................................... vii 1 Wstęp..............................................................
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Skalowanie czujników prędkości kątowej i orientacji przestrzennej 1. Analiza właściwości czujników i układów
Samochodowe systemy kontrolno dyspozytorskie GPS
 Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Samochodowe systemy kontrolno dyspozytorskie GPS Podstawowa konfiguracja systemu Prezentowany system służy do nadzoru dyspozytorskiego w służbach wykorzystujących grupy pojazdów operujących w obszarze
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego. Paweł Rzucidło
 Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Potencjał dydaktyczny Politechniki Rzeszowskiej dla sektora kosmicznego Paweł Rzucidło 1 Politechnika Rzeszowska 2 Kierunki kształcenia studentów architektura, budownictwo, inżynieria środowiska, ochrona
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja Cel konkursu
 Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
Regulamin konkursu studenckiego na Bezzałogowy Statek Powietrzny Bezmiechowa edycja 2016 1. Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE
 PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
PROFESJONALNY SYSTEM BEZZAŁOGOWY GRYF PLAN FLY CREATE SYSTEM BEZZAŁGOWY GRYF System GRYF jest innowacyjną, wielofunkcyjną platformą bezzałogową, przeznaczoną do szerokiego grona zastosowań. Dzięki wykonywaniu
Obiekt Latający: Model Paralotni z Napędem. Mateusz Lubecki Akademicki Klub Lotniczy PRz. (propozycja projektu do realizacji)
") Obiekt Latający: Model Paralotni z Napędem (propozycja projektu do realizacji) Mateusz Lubecki Akademicki Klub Lotniczy PRz Zastosowania Monitoring z powietrza dzięki zainstalowanej kamerze CCTV oraz nadajnikowi
Obiekt Latający: Model Paralotni z Napędem (propozycja projektu do realizacji) Mateusz Lubecki Akademicki Klub Lotniczy PRz Zastosowania Monitoring z powietrza dzięki zainstalowanej kamerze CCTV oraz nadajnikowi
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]
![Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]](/thumbs/56/39412017.jpg "Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010]") Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Regulamin konkursu Bezzałogowy Statek Powietrzny (BSP)- [edycja 2010] 1 Cel konkursu Celem konkursu BSP jest zainspirowanie uczestników do poszukiwania rozwiązań potencjalnie przydatnych w użytkowym lotnictwie
Załącznik 2. System kamer obserwacji z przodu pojazdu UGV. (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6.
 Krótka specyfikacja WP6.") Załącznik 2 System kamer obserwacji z przodu pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 4 1.1. WPROWADZENIE 4 1.2. Przeznaczenie
Załącznik 2 System kamer obserwacji z przodu pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 4 1.1. WPROWADZENIE 4 1.2. Przeznaczenie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia I stopnia (inżynierskie) Temat: Pomiar prędkości kątowych samolotu przy pomocy czujnika ziemskiego pola magnetycznego 1. Analiza właściwości
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Analiza właściwości pilotażowych samolotu Specjalność: Pilotaż lub Awionika 1. Analiza stosowanych kryteriów
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania. Studia: II stopnia (magisterskie)
") Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Tematy prac dyplomowych w Katedrze Awioniki i Sterowania Studia II stopnia (magisterskie) Temat: Układ sterowania płaszczyzną sterową o podwyższonej niezawodności 1. Analiza literatury. 2. Uruchomienie
Dokumentacja Techniczna Bezzałogowego Systemu Latającego BSL-X1 Koło Naukowe EUROAVIA Rzeszów
 BSL- Dokumentacja Techniczna Bezzałogowego Systemu Latającego BSL-X1 Koło Naukowe EUROAVIA Rzeszów 2012-09-20 Spis treści: 1. Wprowadzenie 3 1. Geneza projektu.3 2. Skład drużyny.3 3. Prace dyplomowe zrealizowane
BSL- Dokumentacja Techniczna Bezzałogowego Systemu Latającego BSL-X1 Koło Naukowe EUROAVIA Rzeszów 2012-09-20 Spis treści: 1. Wprowadzenie 3 1. Geneza projektu.3 2. Skład drużyny.3 3. Prace dyplomowe zrealizowane
AUTO-EMAIL SYSTEM. Ted-Electronics, Skoczów, 2008-03-17
 AUTO-EMAIL SYSTEM Ted-Electronics, Skoczów, 2008-03-17 Podstawowe informacje System kontroli pojazdów Technologia lokalizacyjna - GPS Technologia transmisji danych - GPRS Monitorowanie pracy pojazdu System
AUTO-EMAIL SYSTEM Ted-Electronics, Skoczów, 2008-03-17 Podstawowe informacje System kontroli pojazdów Technologia lokalizacyjna - GPS Technologia transmisji danych - GPRS Monitorowanie pracy pojazdu System
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
AUTOMATYKA DO BRAM Cennik WAŻNY OD
 AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
AUTOMATYKA DO BRAM Cennik WAŻNY OD 17.10.2019 Napędy do bram przesuwnych AB600 NAPĘD BRAMY PRZESUWNEJ DO 500KG Wbudowany enkoder - system wykrywania przeszkody. Napęd samoblokujący, nie wymaga stosowania
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku
 kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
Zapytanie ofertowe Nr 02/01/2018
 Świdnik, dn. 31-01-2018r. AIR AGRO Sp. z o.o. ul. Sosnowa 9 05-080 Koczargi Stare Zapytanie ofertowe Nr 02/01/2018. Firma AIR AGRO Sp. z o.o. kieruje do Państwa zapytanie ofertowe i zaprasza do złożenia
Świdnik, dn. 31-01-2018r. AIR AGRO Sp. z o.o. ul. Sosnowa 9 05-080 Koczargi Stare Zapytanie ofertowe Nr 02/01/2018. Firma AIR AGRO Sp. z o.o. kieruje do Państwa zapytanie ofertowe i zaprasza do złożenia
WSPÓŁPRACA NAUKA PRZEMYSŁ
 Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
Rzeszów, 2007.07.19 POLITECHNIKA RZESZOWSKA WSPÓŁPRACA NAUKA PRZEMYSŁ Projekty realizowane w ramach CZT AERONET oraz Sieci Naukowej Aeronautica Integra Prof. dr hab. inż. Marek ORKISZ DEMONSTRATOR ZAAWANSOWANYCH
Bezzałogowy Statek Latający CHIP-5 PCV. Dokumentacja techniczna
 Studenckie Koło Naukowe CHIP Politechnika Gdańska Wydział Elektroniki Telekomunikacji i Informatyki Bezzałogowy Statek Latający CHIP-5 PCV Dokumentacja techniczna Spis treści 1. Wprowadzenie... 4 1.1 O
Studenckie Koło Naukowe CHIP Politechnika Gdańska Wydział Elektroniki Telekomunikacji i Informatyki Bezzałogowy Statek Latający CHIP-5 PCV Dokumentacja techniczna Spis treści 1. Wprowadzenie... 4 1.1 O
Terminali GPRS S6 Strona 1 z 11. Terminal GPRS. Albatross S6. Instrukcja montażu wersja 4.2
 Strona 1 z 11 Terminal GPRS Albatross S6 Instrukcja montażu wersja 4.2 Strona 2 z 11 Spis treści: 1. Ogólne informacje... 3 2. Montaż Terminala GPRS w wersji S6.1 (pojazd bez instalacji CAN)... 5 3. Montaż
Strona 1 z 11 Terminal GPRS Albatross S6 Instrukcja montażu wersja 4.2 Strona 2 z 11 Spis treści: 1. Ogólne informacje... 3 2. Montaż Terminala GPRS w wersji S6.1 (pojazd bez instalacji CAN)... 5 3. Montaż
PL B1. Svensson Jngemar,Głosków,PL Svensson Karol,Głosków,PL BUP 15/ WUP 07/09. Groszkowski Przemysław
 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 202803 (13) B1 (21) Numer zgłoszenia: 351759 (51) Int.Cl. B64C 1/00 (2006.01) B64C 27/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 202803 (13) B1 (21) Numer zgłoszenia: 351759 (51) Int.Cl. B64C 1/00 (2006.01) B64C 27/02 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22)
OFERTA NA SYSTEM LIVE STREAMING
 JNS Sp. z o.o. ul. Wróblewskiego 18 93-578 Łódź NIP: 725-189-13-94 tel. +48 42 209 27 01, fax. +48 42 209 27 02 e-mail: biuro@jns.pl Łódź, 2015 r. OFERTA NA SYSTEM LIVE STREAMING JNS Sp. z o.o. z siedzibą
JNS Sp. z o.o. ul. Wróblewskiego 18 93-578 Łódź NIP: 725-189-13-94 tel. +48 42 209 27 01, fax. +48 42 209 27 02 e-mail: biuro@jns.pl Łódź, 2015 r. OFERTA NA SYSTEM LIVE STREAMING JNS Sp. z o.o. z siedzibą
System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne.
 System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne. Charakterystyka. Monitoring poziomu gazu w zbiornikach LPG, zużycia gazu, wody lub energii cieplnej). Zdalny
System monitoringu ze zdalnym odczytem radiowym, oparty na technologii GSM. Dane techniczne. Charakterystyka. Monitoring poziomu gazu w zbiornikach LPG, zużycia gazu, wody lub energii cieplnej). Zdalny
SOLIDNY, WYDAJNY I ŁATWY W MONTAŻU IXENGO L 230 V RTS. Napęd śrubowy do bram skrzydłowychh
 SOLIDNY, WYDAJNY I ŁATWY W MONTAŻU IXENGO L 230 V RTS Napęd śrubowy do bram skrzydłowychh Ixengo L 230 V RTS Napęd śrubowy do bram skrzydłowych SKRZYDŁO DO 4 M 400 KG Solidny, wydajny i łatwy w montażu
SOLIDNY, WYDAJNY I ŁATWY W MONTAŻU IXENGO L 230 V RTS Napęd śrubowy do bram skrzydłowychh Ixengo L 230 V RTS Napęd śrubowy do bram skrzydłowych SKRZYDŁO DO 4 M 400 KG Solidny, wydajny i łatwy w montażu
ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015
 AERO LOGIN Sp. z o.o. Kaniów, dnia 31.12.2015 ul. Stefana Kóski 45, 43-512 Kaniów ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015 Wynajem bezzałogowych statków powietrznych wraz usługami związanymi z eksploatacją
AERO LOGIN Sp. z o.o. Kaniów, dnia 31.12.2015 ul. Stefana Kóski 45, 43-512 Kaniów ZAPYTANIE OFERTOWE NR 8/INNOLOT/2015 Wynajem bezzałogowych statków powietrznych wraz usługami związanymi z eksploatacją
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Opis elementów ekranu OSD by Pitlab&Zbig
 Opis elementów ekranu OSD by Pitlab&Zbig Rysunek 1 przykładowy układ ekranu OSD. Rozmieszczenie elementów na ekranie dla dwóch własnych ekranów może być dowolnie modyfikowane, każdy element może być pokazany
Opis elementów ekranu OSD by Pitlab&Zbig Rysunek 1 przykładowy układ ekranu OSD. Rozmieszczenie elementów na ekranie dla dwóch własnych ekranów może być dowolnie modyfikowane, każdy element może być pokazany
Kamera Domu Inteligentnego. Instrukcja instalacji
 Kamera Domu Inteligentnego Instrukcja instalacji 1 Spis treści 1.Wprowadzenie... 3 2.Wymagania sprzętowe... 3 3.Specyfikacja techniczna... 3 4.Schemat urządzenia... 4 5.Instalacja urządzenia... 4 6.Instalacja
Kamera Domu Inteligentnego Instrukcja instalacji 1 Spis treści 1.Wprowadzenie... 3 2.Wymagania sprzętowe... 3 3.Specyfikacja techniczna... 3 4.Schemat urządzenia... 4 5.Instalacja urządzenia... 4 6.Instalacja
POLITECHNIKA RZESZOWSKA PLAN STUDIÓW
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów z
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa PLAN STUDIÓW dla kierunku: Lotnictwo i kosmonautyka studia II stopnia stacjonarne Rzeszów 09. 12. 2015 Plan studiów z
Czym jest OnDynamic? OnDynamic dostarcza wartościowych danych w czasie rzeczywistym, 24/7 dni w tygodniu w zakresie: czasu przejazdu,
 Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Czym jest OnDynamic? OnDynamic (Multimodalny System Monitoringu Ruchu Drogowego) to inteligentna architektura czujników i specjalistycznego oprogramowania, które gwarantują przetwarzanie dużej ilości różnorodnych
Wymagania dla kamer obwodowych pojazdu UGV. Krótka specyfikacja
 ODTAJNIONY Załącznik 4 Wymagania dla kamer obwodowych pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 3 1.1. WPROWADZENIE 3 1.2.
ODTAJNIONY Załącznik 4 Wymagania dla kamer obwodowych pojazdu UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 3 1.1. WPROWADZENIE 3 1.2.
1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
 SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
SPECYFIKACJA TECHNICZNA I ZAKRES RZECZOWY załącznik nr 6 do SIWZ nr 1 do umowy 1. Wymagania funkcjonalne dla modułu pozycjonowania patroli zainstalowany moduł musi posiadać następującą funkcjonalność:
Zawartość opakowania. Urządzenie LK210 Przewody zasilające Przekaźnik do odcięcia zapłonu Instrukcja obsługi
 Instrukcja użytkownika lokalizatora GPS LK210 Wersja elektroniczna na www.angelgts.eu Zawartość opakowania Urządzenie LK210 Przewody zasilające Przekaźnik do odcięcia zapłonu Instrukcja obsługi 1 Parametry
Instrukcja użytkownika lokalizatora GPS LK210 Wersja elektroniczna na www.angelgts.eu Zawartość opakowania Urządzenie LK210 Przewody zasilające Przekaźnik do odcięcia zapłonu Instrukcja obsługi 1 Parametry
Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej
 Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej 1 Pozyskiwanie danych Typy bezzałogowców wykorzystywanych do oblotów Samoloty bezzałogowe: Duże obiekty powierzchniowe
Możliwość zastosowania dronów do monitorowania infrastruktury elektroenergetycznej 1 Pozyskiwanie danych Typy bezzałogowców wykorzystywanych do oblotów Samoloty bezzałogowe: Duże obiekty powierzchniowe
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology
 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Air Force Institute of Technology MISJA Naukowo-badawcze wspomaganie eksploatacji lotniczej techniki wojskowej 2 INSTYTUT TECHNICZNY WOJSK LOTNICZYCH Podstawowe informacje
PRZENOŚNY ZESTAW DO MONITORINGU IP, HD-CVI, obsługa do 4 kamer, PZC-401-IP
 MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl PRZENOŚNY ZESTAW DO MONITORINGU IP, HD-CVI, obsługa do 4 kamer, PZC-401-IP Produkt
MDH System Strona 1 MDH-SYSTEM ul. Bajkowa 5, Lublin tel./fax.81-444-62-85 lub kom.693-865-235 e mail: info@mdh-system.pl PRZENOŚNY ZESTAW DO MONITORINGU IP, HD-CVI, obsługa do 4 kamer, PZC-401-IP Produkt
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0
 INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu. 20 maja, 2016 R. Krenz 1
 Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Cyfrowy system łączności dla bezzałogowych statków powietrznych średniego zasięgu R. Krenz 1 Wstęp Celem projektu było opracowanie cyfrowego system łączności dla bezzałogowych statków latających średniego
Oferta produktów i usług w zakresie monitorowania pojazdów firmy Monitoring Wielkopolski. Oferta handlowa. www.monitoringwielkopolski.
 Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Laboratoria badawcze
 rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
rok założenia: 1989 ZAKŁAD PRODUKCJI METALOWEJ ul. Martyniaka 14 10-763 Olsztyn tel./faks: (0-89) 524-43-88, 513-68-18 biuro@zpm.net.pl www.zpm.net.pl Laboratoria badawcze Spis treści 1. Wielokrotne otwieranie
Stacja graficzna szkoleniowa typ A1, A2, B - Procedura odbioru sprzętu
 Załącznik nr 3 do umowy z dnia Stacja graficzna szkoleniowa typ A1, A2, B - Procedura odbioru sprzętu. Sprawdzić, czy numery seryjne zestawu są zgodne z dokumentami dostawy i protokołami odbioru sprzętu.
Załącznik nr 3 do umowy z dnia Stacja graficzna szkoleniowa typ A1, A2, B - Procedura odbioru sprzętu. Sprawdzić, czy numery seryjne zestawu są zgodne z dokumentami dostawy i protokołami odbioru sprzętu.
www.zamelcet.com Bezprzewodowy System Sterowania exta free exta free www.zamelcet.com
 Bezprzewodowy System Sterowania EXTA FREE to propozycja bezprzewodowego (radiowego) systemu sterowania pracą urządzeń elektrycznych w instalacjach domowych, biurowych i częściowo przemysłowych. System
Bezprzewodowy System Sterowania EXTA FREE to propozycja bezprzewodowego (radiowego) systemu sterowania pracą urządzeń elektrycznych w instalacjach domowych, biurowych i częściowo przemysłowych. System
PL B1. POLITECHNIKA LUBELSKA, Lublin, PL BUP 05/13. PIOTR WOLSZCZAK, Lublin, PL WUP 05/16. rzecz. pat.
 PL 221679 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221679 (13) B1 (21) Numer zgłoszenia: 396076 (51) Int.Cl. G08B 29/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
PL 221679 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 221679 (13) B1 (21) Numer zgłoszenia: 396076 (51) Int.Cl. G08B 29/00 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej (22) Data zgłoszenia:
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF. Mariusz Kacprzak, Konrad Wodziński
 Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
Przegląd zdjęć lotniczych lasów wykonanych w projekcie HESOFF Mariusz Kacprzak, Konrad Wodziński Plan prezentacji: 1) Omówienie głównych celów projektu oraz jego głównych założeń 2) Opis platformy multisensorowej
SZYBKI START. Na jednym z pulpitów wciśnij i przytrzymaj przycisk (4) aż poczujesz wibracje,
 aż poczujesz wibracje,") SZYBKI START Podstawy sterowania urządzeniem: Aby włączyć urządzenie: Wciśnij i przytrzymaj przycisk (1) aż zgaśnie dioda (5), Aby wyłączyć urządzenie: Na jednym z pulpitów wciśnij i przytrzymaj przycisk
SZYBKI START Podstawy sterowania urządzeniem: Aby włączyć urządzenie: Wciśnij i przytrzymaj przycisk (1) aż zgaśnie dioda (5), Aby wyłączyć urządzenie: Na jednym z pulpitów wciśnij i przytrzymaj przycisk
3RS SZYNOWO-DROGOWY WÓZEK MANEWROWY
 3RS SZYNOWO-DROGOWY WÓZEK MANEWROWY GŁÓWNE PARAMETRY TECHNICZNE Maksymalna masa pojazdu do przetaczania: Maks. prędkość jazdy szynowej z obciążeniem / bez obciążenia: 350 t 3 / 6 km/h 3RS 1 / 5 PRZEZNACZENIE
3RS SZYNOWO-DROGOWY WÓZEK MANEWROWY GŁÓWNE PARAMETRY TECHNICZNE Maksymalna masa pojazdu do przetaczania: Maks. prędkość jazdy szynowej z obciążeniem / bez obciążenia: 350 t 3 / 6 km/h 3RS 1 / 5 PRZEZNACZENIE
Oferta produktów i usług w zakresie monitorowania pojazdów firmy Monitoring Wielkopolski. Oferta handlowa. www.monitoringwielkopolski.
 Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Wymagania systemu komunikacji głosowej dla UGV (Unmanned Ground Vehicle - Krótka specyfikacja
 Wymagania systemu komunikacji głosowej dla UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP nr 6 Strona 1 Spis treści 1 ZAKRES 3 1.1 IDENTYFIKACJA 3 1.2 Przeznaczenie
Wymagania systemu komunikacji głosowej dla UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP nr 6 Strona 1 Spis treści 1 ZAKRES 3 1.1 IDENTYFIKACJA 3 1.2 Przeznaczenie
ODPOWIEDZI NA PYTANIA DO SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA ORAZ ZAWIADOMIENIE O ZMIANIE TREŚCI SPECYFIKACJI ISTOTNYCH WARUNKÓW ZAMÓWIENIA
 Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
Dęblin, dnia 23.03.2016 r. Do Wykonawców postepowania numer Zp/pn/24/2016 Dotyczy: Specyfikacji Istotnych Warunków Zamówienia do przetargu nieograniczonego na dostawę systemu bezzałogowego statku powietrznego
KNL/Melavio OSA WARSZAWA 2009
 KNL/Melavio OSA WARSZAWA 2009 SPIS TREŚCI 1. Zespół...3 2. Projekt koncepcyjny systemu...4 2.1. Opis realizacji misji...4 2.2. Wybór układu płatowca...4 2.3. Dobór głównych parametrów geometrycznych i
KNL/Melavio OSA WARSZAWA 2009 SPIS TREŚCI 1. Zespół...3 2. Projekt koncepcyjny systemu...4 2.1. Opis realizacji misji...4 2.2. Wybór układu płatowca...4 2.3. Dobór głównych parametrów geometrycznych i
Państwowa Komisja Badania Wypadków Lotniczych Samolot ultralekki Aerospool WT-9 Dynamic; SP-SPEC; r., Jejkowice k/rybnika ALBUM ILUSTRACJI
 ALBUM ILUSTRACJI z wypadku samolotu ultralekkiego Aerospool WT-9 Dynamic; SP-SPEC 15 grudnia 2009 r., Jejkowice k/rybnika ALBUM ILUSTRACJI Strona 1 z 15 1 Samolot Aerospool WT-9 Dynamic SP-SPEC na zdjęciu
ALBUM ILUSTRACJI z wypadku samolotu ultralekkiego Aerospool WT-9 Dynamic; SP-SPEC 15 grudnia 2009 r., Jejkowice k/rybnika ALBUM ILUSTRACJI Strona 1 z 15 1 Samolot Aerospool WT-9 Dynamic SP-SPEC na zdjęciu
GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA
 BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
BIRDIE UAV GEODEZJA BUDOWNICTWO LEŚNICTWO ROLNICTWO OCHRONA ŚRODOWISKA ENERGETYKA BIRDIE UAV SZYTY NA MIARĘ BIRDIE to profesjonalny bezzałogowy system latający, dedykowany geodezji i rolnictwu. Wyróżnia
System multimedialny Muzeum Górnośląski Park Etnograficzny.
 System multimedialny Muzeum Górnośląski Park Etnograficzny. Rozwój infrastruktury Muzeum celem uatrakcyjnienia oferty turystycznej o kulturalnej (Etap I).
System multimedialny Muzeum Górnośląski Park Etnograficzny. Rozwój infrastruktury Muzeum celem uatrakcyjnienia oferty turystycznej o kulturalnej (Etap I).
nowoczesnych technologii
 w przestworzach nowoczesnych technologii BSP - Bezzałogowe Systemy Powietrzne Bezzałogowe jednostki latające to urządzenia, które nie wymagają do lotu załogi obecnej na pokładzie oraz nie posiadają możliwości
w przestworzach nowoczesnych technologii BSP - Bezzałogowe Systemy Powietrzne Bezzałogowe jednostki latające to urządzenia, które nie wymagają do lotu załogi obecnej na pokładzie oraz nie posiadają możliwości
ES-CTI2 Jednostka Sterująca 2.4GHz System Centralnego Nadzoru Opraw Awaryjnych Instrukcja montażu
 ES-CTI2 Jednostka Sterująca 2.4GHz System Centralnego Nadzoru Opraw Awaryjnych Instrukcja montażu Spis treści 1. Uwagi ogólne... 3 2. Dane techniczne... 4 3. Przeznaczenie... 4 4. Charakterystyka... 4
ES-CTI2 Jednostka Sterująca 2.4GHz System Centralnego Nadzoru Opraw Awaryjnych Instrukcja montażu Spis treści 1. Uwagi ogólne... 3 2. Dane techniczne... 4 3. Przeznaczenie... 4 4. Charakterystyka... 4
MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ
 Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
Mgr inż. Kamil DZIĘGIELEWSKI Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.232 MODEL STANOWISKA DO BADANIA OPTYCZNEJ GŁOWICY ŚLEDZĄCEJ Streszczenie: W niniejszym referacie zaprezentowano stanowisko
PL 175488 B1 (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994
 OPIS PATENTOWY (19) PL (11) 175488 (13) B1. (22) Data zgłoszenia: 08.12.1994") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 175488 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 306167 (22) Data zgłoszenia: 08.12.1994 (51) IntCl6: G01K 13/00 G01C
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP (96) Data i numer zgłoszenia patentu europejskiego:") RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2776315 (96) Data i numer zgłoszenia patentu europejskiego: 19.07.2013 13753588.6 (13) (51) T4 Int.Cl. B64C 29/00 (2006.01)
RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 2776315 (96) Data i numer zgłoszenia patentu europejskiego: 19.07.2013 13753588.6 (13) (51) T4 Int.Cl. B64C 29/00 (2006.01)
Oferta produktów i usług w zakresie monitorowania pojazdów firmy Monitoring Wielkopolski. Oferta handlowa. www.monitoringwielkopolski.
 Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Firma Monitoring Wielkopolski działa na rynku od 1998 roku w zakresie ochrony osób i mienia poprzez monitorowanie sygnałów alarmowych i wysyłanie grup interwencyjnych na miejsce zdarzenia. Firma Monitoring
Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba.
 Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba. Wklejamy wzmocnienia łoża płata oraz wzmocnienie mocowania serwomechanizmów do ścianki bocznej kadłuba. Wklejamy wręgi
Instrukcja montażu modelu MICHAŚ RC. Budowę modelu rozpoczynamy od montażu kadłuba. Wklejamy wzmocnienia łoża płata oraz wzmocnienie mocowania serwomechanizmów do ścianki bocznej kadłuba. Wklejamy wręgi
F&F Filipowski Sp. J Pabianice, ul. Konstantynowska 79/81 tel KARTA KATALOGOWA
 95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-ir16 LR Nadajnik / odbiornik podczerwieni systemu F&Home RADIO. Wersja LR powiększony zasięg. 95-00 Pabianice,
95-00 Pabianice, ul. Konstantynowska 79/81 tel. +48 4 15 3 83 www.fif.com.pl KARTA KATALOGOWA rh-ir16 LR Nadajnik / odbiornik podczerwieni systemu F&Home RADIO. Wersja LR powiększony zasięg. 95-00 Pabianice,
Pentaplex - Systemy Zabezpieczeń Utworzono : 22 czerwiec 2017
 Zarządzanie Flotą > Rejestratory Mobilne > Model : EVM400 Producent : Everfocus Profesjonalny cyfrowy rejestrator mobilny EVM400 umożliwia nagrywanie obrazu z 4 kamer przemysłowych oraz dźwięku z 4 źródeł
Zarządzanie Flotą > Rejestratory Mobilne > Model : EVM400 Producent : Everfocus Profesjonalny cyfrowy rejestrator mobilny EVM400 umożliwia nagrywanie obrazu z 4 kamer przemysłowych oraz dźwięku z 4 źródeł
Technologia, która miała swój początek wraz z wprowadzeniem standardu ISOBUS Pierwsze zastosowania nowego standardu miały miejsce w 2001 roku
 Marketing Marketing SDF SDF Polska Polska 6/2015 1/2013 6/2015 CZYM JEST STANDARD ISOBUS? Technologia, która miała swój początek wraz z wprowadzeniem standardu ISOBUS 11783 Pierwsze zastosowania nowego
Marketing Marketing SDF SDF Polska Polska 6/2015 1/2013 6/2015 CZYM JEST STANDARD ISOBUS? Technologia, która miała swój początek wraz z wprowadzeniem standardu ISOBUS 11783 Pierwsze zastosowania nowego
Szczegółowy opis przedmiotu zamówienia
 Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Numer sprawy: DGA/16/09 Załącznik A do SIWZ Szczegółowy opis przedmiotu zamówienia Przedmiot zamówienia: wyłonienie wykonawcy w zakresie zakupu i dostawy systemu komputerowego z oprogramowaniem, instalacją
Licznik SIGMA ROX 10.0 GPS SET biały (Pulsometr)
") Utworzono: 2017-10-11 10:38:48 Licznik SIGMA ROX 10.0 GPS SET biały (Pulsometr) Cena produktu: 1 099,00 PLN Koszt dostawy: 0,00 PLN Dostępność: Konstrukcja nowego licznika Sigma Rox 10.0 GPS opiera się
Utworzono: 2017-10-11 10:38:48 Licznik SIGMA ROX 10.0 GPS SET biały (Pulsometr) Cena produktu: 1 099,00 PLN Koszt dostawy: 0,00 PLN Dostępność: Konstrukcja nowego licznika Sigma Rox 10.0 GPS opiera się
BADANIE SILNIKA SKOKOWEGO
 Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA SKOKOWEGO Warszawa 00. 1. STANOWISKO I UKŁAD POMIAROWY. W skład stanowiska pomiarowego
Politechnika Warszawska Instytut Maszyn Elektrycznych Laboratorium Maszyn Elektrycznych Malej Mocy BADANIE SILNIKA SKOKOWEGO Warszawa 00. 1. STANOWISKO I UKŁAD POMIAROWY. W skład stanowiska pomiarowego
Instrukcja użytkownika LK100B. Zawartość opakowania
 Instrukcja użytkownika LK100B Wersja elektroniczna na www.angelgts.eu Zawartość opakowania Urządzenie LK210 Przewody zasilające Przekaźnik do odcięcia zapłonu Instrukcja obsługi 1 Parametry techniczne
Instrukcja użytkownika LK100B Wersja elektroniczna na www.angelgts.eu Zawartość opakowania Urządzenie LK210 Przewody zasilające Przekaźnik do odcięcia zapłonu Instrukcja obsługi 1 Parametry techniczne
KOSZTORYS OFERTOWY. Cześć I - dostawa komputerów przenośnych (laptopów) i urządzeń sieciowych
 i urządzeń sieciowych") Dostawa sprzętu komputerowego i multimedialnego w ramach rządowego programu Cyfrowa szkoła" dla Szkoły Podstawowej Nr 1 im. Komisji Edukacji Narodowej w Miejskim Zespole Szkół Nr 5 w Krośnie Załącznik
Dostawa sprzętu komputerowego i multimedialnego w ramach rządowego programu Cyfrowa szkoła" dla Szkoły Podstawowej Nr 1 im. Komisji Edukacji Narodowej w Miejskim Zespole Szkół Nr 5 w Krośnie Załącznik
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU INSTALACJA URZĄDZEŃ ELEKTRONICZNYCH. Ćwiczenie 6: WYKONANIE INSTALACJI monitoringu cyfrowego IP
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U INSTALACJA URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 6: WYKONANIE INSTALACJI monitoringu cyfrowego IP Opracował mgr inż. Artur Kłosek
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U INSTALACJA URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 6: WYKONANIE INSTALACJI monitoringu cyfrowego IP Opracował mgr inż. Artur Kłosek
POLITECHNIKA GDAŃSKA WYDZIAŁ MECHANICZNY PROJEKT DYPLOMOWY INŻYNIERSKI
 Rodzaj studiów: stacjonarne Opracowanie koncepcji napędu głównego dla dwu-zadaniowego nawodnopodwodnego bezzałogowego pojazdu morskiego 1. Wstęp 2. Tematyka badań 3. Cel badań i zakres pracy 4. Problem
Rodzaj studiów: stacjonarne Opracowanie koncepcji napędu głównego dla dwu-zadaniowego nawodnopodwodnego bezzałogowego pojazdu morskiego 1. Wstęp 2. Tematyka badań 3. Cel badań i zakres pracy 4. Problem
RZECZYWISTE ROZWIĄZANIE REALNYCH POTRZEB
 RZECZYWISTE ROZWIĄZANIE REALNYCH POTRZEB Huginn x1 Huginn X1 zaprojektowany został jako kompleksowe rozwiązanie do inspekcji miejsc niebezpiecznych i niedostępnych. Niewielkie rozmiary sprawiają że może
RZECZYWISTE ROZWIĄZANIE REALNYCH POTRZEB Huginn x1 Huginn X1 zaprojektowany został jako kompleksowe rozwiązanie do inspekcji miejsc niebezpiecznych i niedostępnych. Niewielkie rozmiary sprawiają że może
Rozproszony system zbierania danych.
 Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
Rozproszony system zbierania danych. Zawartość 1. Charakterystyka rozproszonego systemu.... 2 1.1. Idea działania systemu.... 2 1.2. Master systemu radiowego (koordynator PAN).... 3 1.3. Slave systemu
Wymagania systemu procesora wideo pojazdu bezzałogowego UGV. Krótka specyfikacja. (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Załącznik 5
 Załącznik 5") Załącznik 5 Wymagania systemu procesora wideo pojazdu bezzałogowego UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 3 1.1. WPROWADZENIE
Załącznik 5 Wymagania systemu procesora wideo pojazdu bezzałogowego UGV (Unmanned Ground Vehicle - Bezzałogowy Pojazd Naziemny) Krótka specyfikacja WP6 Strona 1 Spis treści 1. ZAKRES 3 1.1. WPROWADZENIE
Procedura testowa. b) urządzeń sieciowych montowanych w szafkach nasłupowych, wraz z zasilaczem dostosowanym do zasilania z sieci elektrycznej 230W.
 urządzeń sieciowych montowanych w szafkach nasłupowych, wraz z zasilaczem dostosowanym do zasilania z sieci elektrycznej 230W.") ZAŁĄCZNIK NR 6 do SIWZ Procedura testowa 1. Wykonawca, którego oferta zostanie najwyżej oceniona (tj. oferta nie podlegająca odrzuceniu, która uzyskała największą liczbę punktów w zastosowanych kryteriach
ZAŁĄCZNIK NR 6 do SIWZ Procedura testowa 1. Wykonawca, którego oferta zostanie najwyżej oceniona (tj. oferta nie podlegająca odrzuceniu, która uzyskała największą liczbę punktów w zastosowanych kryteriach
Oferta CyberTrick CarSharing
 Oferta CyberTrick CarSharing System do wynajmu pojazdów na czas - działający online CYBERTRICK 4 września 2017 Autor: Michał Walkusz Oferta CyberTrick CarSharing I. Spis treści II. OPIS SYSTEMU... 2 III.
Oferta CyberTrick CarSharing System do wynajmu pojazdów na czas - działający online CYBERTRICK 4 września 2017 Autor: Michał Walkusz Oferta CyberTrick CarSharing I. Spis treści II. OPIS SYSTEMU... 2 III.
Wyposażenie Samolotu
 P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
System przesyłu danych z elektrociepłowni Zofiówka
 System przesyłu danych z elektrociepłowni Zofiówka Stanisław Wideł Szkoła Komputerowa Impuls Szkoła Komputerowa Impuls, www.ipnet.pl, sekretariat@ipnet.pl 1 Co to jest system monitorowania stanu dynamiki
System przesyłu danych z elektrociepłowni Zofiówka Stanisław Wideł Szkoła Komputerowa Impuls Szkoła Komputerowa Impuls, www.ipnet.pl, sekretariat@ipnet.pl 1 Co to jest system monitorowania stanu dynamiki
Wszystkie powyższe funkcje sprawiają, że urządzenie PIORUN doskonale nadaje się do ochrony i kontroli położenia pojazdów.
 GX 700 PIORUN Urządzenie GX 700 PIORUN jest produktem wyjątkowym na polskim rynku. Łączy w sobie zalety systemu bezprzewodowego i czynnego alarmu. Co je wyróżnia? Jest bezprzewodowe dzięki temu w zerowym
GX 700 PIORUN Urządzenie GX 700 PIORUN jest produktem wyjątkowym na polskim rynku. Łączy w sobie zalety systemu bezprzewodowego i czynnego alarmu. Co je wyróżnia? Jest bezprzewodowe dzięki temu w zerowym
Podsumowanie prac nad projektem StarTiger Dropter. Dropter - Terrestial Dropship Demonstrator
 Podsumowanie prac nad projektem StarTiger Dropter - Terrestial Dropship Demonstrator Instytut Automatyki i Inżynierii Informatycznej Bydgoszcz, 20 maj 2016 Idea programu StarTiger StarTiger Projekt badawczo-rozwojowy
Podsumowanie prac nad projektem StarTiger Dropter - Terrestial Dropship Demonstrator Instytut Automatyki i Inżynierii Informatycznej Bydgoszcz, 20 maj 2016 Idea programu StarTiger StarTiger Projekt badawczo-rozwojowy
Doskonalenie jakości edukacji zawodowej - współpraca i partnerstwo
 Radom, 18 marca 2015 r. Jacek Wojutyński Mariusz Siczek Doskonalenie jakości edukacji zawodowej - współpraca i partnerstwo Praca naukowa wykonana w ramach realizacji Programu Strategicznego pn. Innowacyjne
Radom, 18 marca 2015 r. Jacek Wojutyński Mariusz Siczek Doskonalenie jakości edukacji zawodowej - współpraca i partnerstwo Praca naukowa wykonana w ramach realizacji Programu Strategicznego pn. Innowacyjne
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV
 Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Sensoryka i układy pomiarowe łazika marsjańskiego Scorpio IV http://scorpio.pwr.wroc.pl/ Konrad Cop KN OFF-ROAD Ogólnie o łaziku Mobilna platforma badawczo-eksploatacyjna Przygotowywany na zawody URC i
Państwowa Komisja Badania Wypadków Lotniczych Samolot ultralekki Dedal KB; SP-SZKB; 21.08.2010 r., Łódź ALBUM ILUSTRACJI
 ALBUM ILUSTRACJI z wypadku samolotu ultralekkiego Dedal KB; SP-SZKB 21 sierpnia 2010 r., Łódź ALBUM ILUSTRACJI Strona 1 z 23 1, 2, 3 Samolot Dedal KB SP-SZKB na zdjęciach wykonanych w okresie poprzedzającym
ALBUM ILUSTRACJI z wypadku samolotu ultralekkiego Dedal KB; SP-SZKB 21 sierpnia 2010 r., Łódź ALBUM ILUSTRACJI Strona 1 z 23 1, 2, 3 Samolot Dedal KB SP-SZKB na zdjęciach wykonanych w okresie poprzedzającym
Hoval TopTronic supervisor Urządzenia i system sterowania
 Urządzenia i system sterowania Opis TopTronic Urządzenia i system sterowania TopTronic jest stosowany do wizualizacji stanów systemu, komunikatów błędów, wartości rzeczywistych i nominalnych całego systemu
Urządzenia i system sterowania Opis TopTronic Urządzenia i system sterowania TopTronic jest stosowany do wizualizacji stanów systemu, komunikatów błędów, wartości rzeczywistych i nominalnych całego systemu
CENTRALA STERUJĄCA SMART CONTROL
 Dane Techniczne / Możliwość sterowania urządzeniami marki YOODA i CORTINO za pomocą smartfonów, tabletów i komputera / Tworzenie i zarządzanie grupami urządzeń / Możliwość konfiguracji zdarzeń czasowych
Dane Techniczne / Możliwość sterowania urządzeniami marki YOODA i CORTINO za pomocą smartfonów, tabletów i komputera / Tworzenie i zarządzanie grupami urządzeń / Możliwość konfiguracji zdarzeń czasowych
Opis Systemu Komunikacji Radiowej
 Opis Systemu Komunikacji Radiowej 1. Opis ogólny systemu komunikacji radiowej Głównym zadaniem systemu komunikacji radiowej (SKR) jest zapewnienie dwustronnej łączności pomiędzy stacją naziemną i bezzałogowym
Opis Systemu Komunikacji Radiowej 1. Opis ogólny systemu komunikacji radiowej Głównym zadaniem systemu komunikacji radiowej (SKR) jest zapewnienie dwustronnej łączności pomiędzy stacją naziemną i bezzałogowym
Przełącznik KVM USB. Przełącznik KVM USB z obsługą sygnału audio i 2 portami. Przełącznik KVM USB z obsługą sygnału audio i 4 portami
 Przełącznik KVM USB Przełącznik KVM USB z obsługą sygnału audio i 2 portami Przełącznik KVM USB z obsługą sygnału audio i 4 portami Instrukcja obsługi DS-11403 (2 porty) DS-12402 (4 porty) 1 UWAGA Urządzenie
Przełącznik KVM USB Przełącznik KVM USB z obsługą sygnału audio i 2 portami Przełącznik KVM USB z obsługą sygnału audio i 4 portami Instrukcja obsługi DS-11403 (2 porty) DS-12402 (4 porty) 1 UWAGA Urządzenie