Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
|
|
|
- Władysław Nawrocki
- 6 lat temu
- Przeglądów:
Transkrypt
1 D w sterownikach PLC Siemens S Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki i Automatyki 1
2 Plan wykładu Informacje ogólne o funkcjach realizujących algorytmy regulatorów PID w S7-120 o PID_Compact o PID_3Step O czym pamiętać gdy program w TIA Portal zawiera regulator PID Konfiguracja i strojenie regulatora PID w postaci funkcji PID_Compact w TIA Portal V11 Konfiguracja regulatora PID w postaci funkcji PID_3Step w TIA Portal V11 2
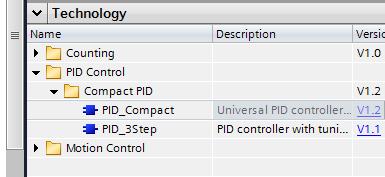
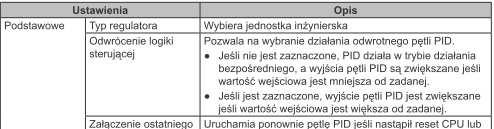
3 Typy regulatorów PID W sterownikach PLC Siemens S7-1200, wykorzystując oprogramowanie TIA Portal V11, można stosować dwa wbudowane typy regulatorów PID za pośrednictwem następujących funkcji: PID_Compact uniwersalny regulator PID z przeznaczeniem do sterowania procesami technologicznymi o ciągłych wartościach na wejściu i wyjściu, PID_3Step z przeznaczeniem do sterowania procesami technologicznymi ze specjalnymi ustawieniami dla urządzeń wykonawczych (np. zawory napędzane silnikami), które potrzebują sygnałów dyskretnych dla działania otwierającego i zamykającego. 3
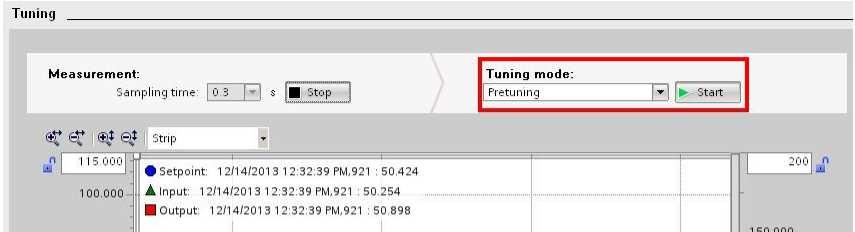
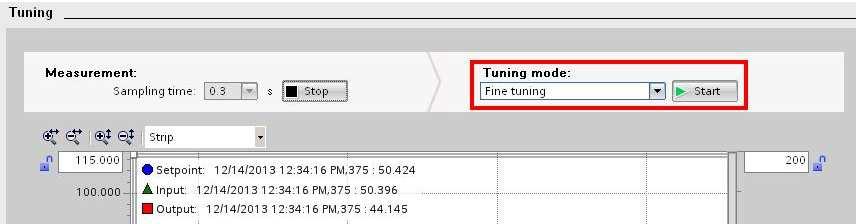
4 Typy regulatorów PID W obu typach regulatorów PID (PID_Compact, PID_3Step): o użytkownik nie musi (ale może) ręcznie inicjować parametrów członów proporcjonalnego (P), całkującego (I) i różniczkującego (D), o można obliczyć/wyznaczyć parametry regulatora podczas jednego z dwóch trybów autodostrajania: tryb pretuning (strojenie wstępne): na bazie czasu narastania oraz czasu martwego, lub tryb fine tuning (strojenie precyzyjne): na bazie stałych i ograniczonych oscylacji (metoda przekaźnikowa). 4
5 Typy regulatorów PID Zmiany wprowadzone w konfiguracji regulatora PID w trybie RUN nie będą uwzględnione dopóki jednostka centralna nie zmieni swojego stanu z trybu STOP na tryb RUN, Oba typy regulatorów (PID_Compact, PID_3Step) należy implementować w cyklicznych blokach organizacyjnych (cykliczny OB). Nie należy wywoływać instrukcji PID w głównych blokach cyklu programu. Instrukcja PID potrzebuje odpowiedniego czasu aby wyznaczyć odpowiedź wynikającą ze zmiany wielkości regulowanej (PV), nie oblicza wielkości sterującej (CV) w każdym cyklu pracy sterownika. 5
6 TIA Portal: konfiguracja regulatorów Zaczynamy od: konfiguracja sterownika, utworzenia cyklicznego bloku organizacyjnego, 6

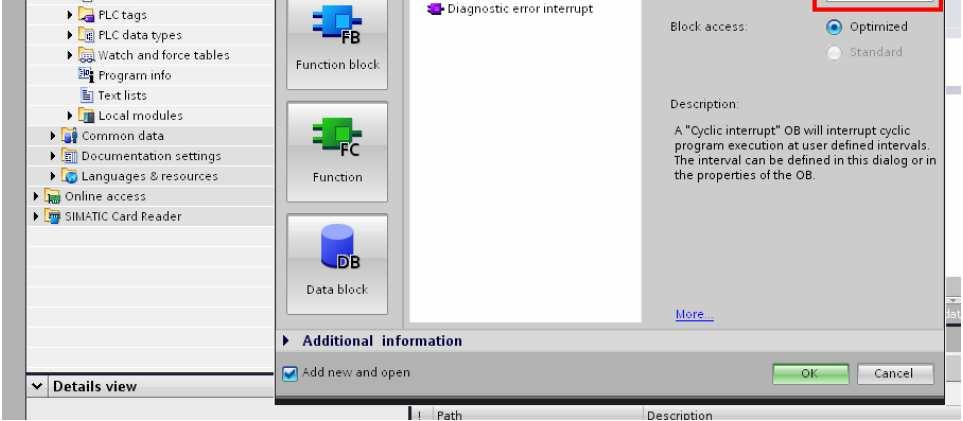
7 TIA Portal: konfiguracja regulatorów 7
8 8


9 Automatyczne utworzenie bloki technologicznego (blok danych konfiguracyjnych regulatora) 9


10 TIA Portal: konfiguracja regulatorów 10
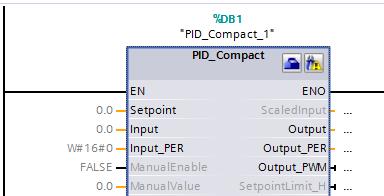
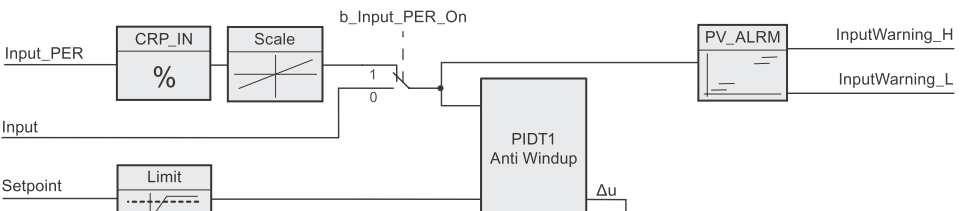
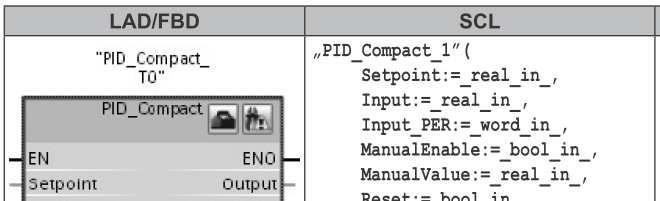
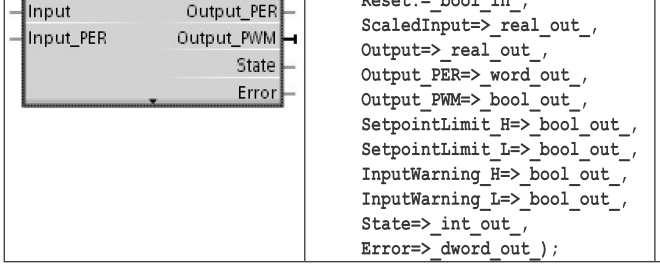
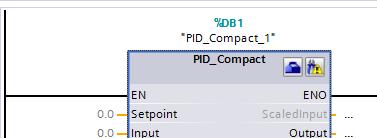
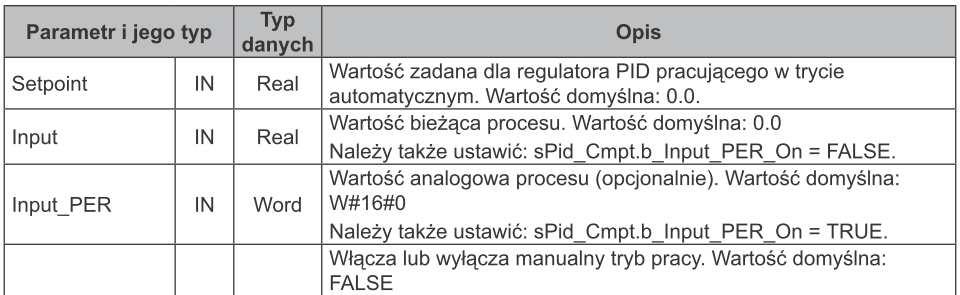
11 PID_Compact 11
12 T1= a TD 12
13 13
14 14


15 15

16 16
17 17
18 18
19 19
20 20

21 21
22 Konfiguracja regulatora lub 22
23 Konfiguracja regulatora 23

24 Konfiguracja regulatora 24

25 Konfiguracja regulatora 25
26 26
27 27

28 28
29 29

30 30
31 Kolejnym etapem jest wgranie skompilowanego programu i konfiguracji do sterownika Następnie przechodzi się w tryb RUN sterownika 31

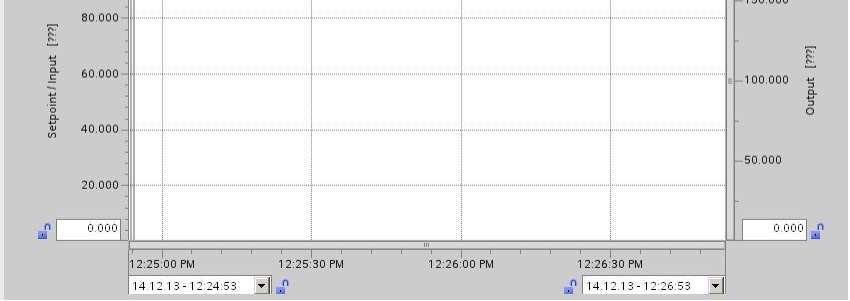
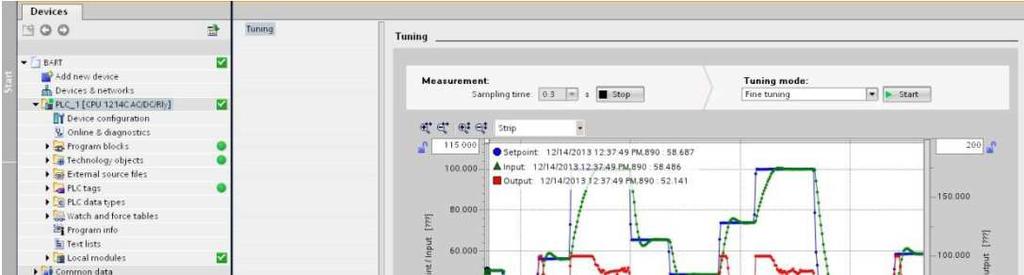
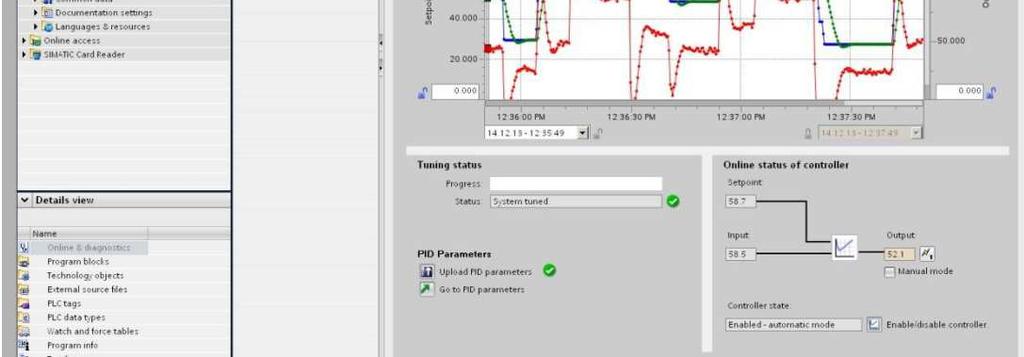
32 Strojenie regulatora 32

33 Strojenie regulatora 33
34 34
35 35
36 36
37 37
38 38
39 39
40 40

41 41

42 42


43 43
44 44
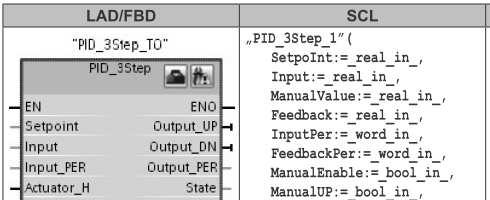
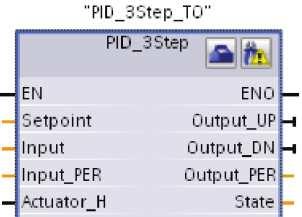
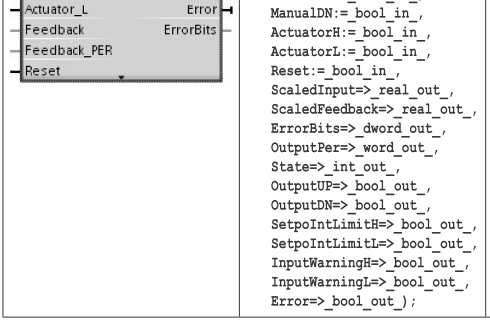
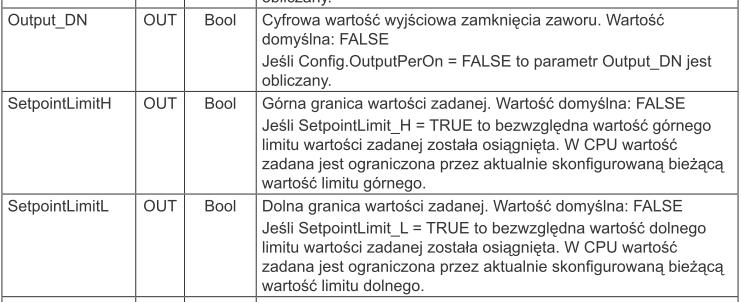
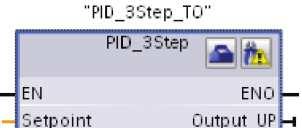
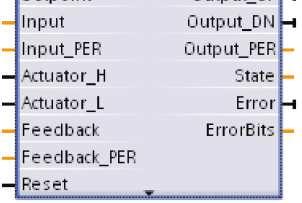
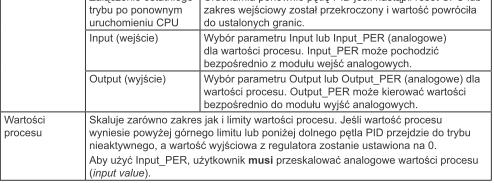
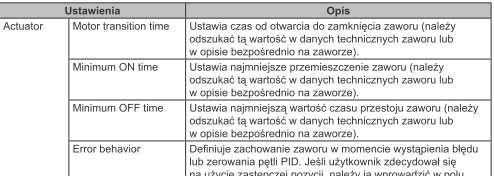
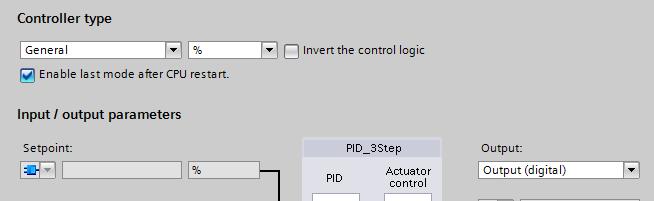
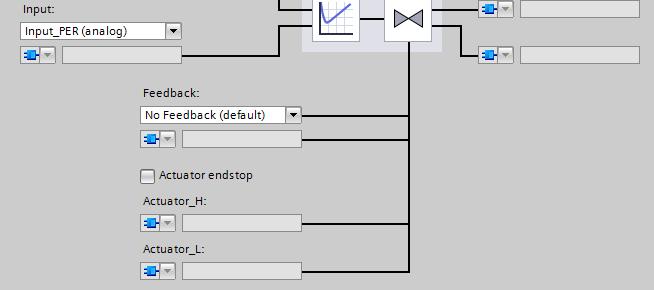
45 Typy regulatorów PID: PID_3Step PID_3Step 45
46 Typy regulatorów PID: PID_3Step T1= a TD 46

47 Typy regulatorów PID: PID_3Step 47
48 Typy regulatorów PID: PID_3Step 48
49 Typy regulatorów PID: PID_3Step 49

50 Typy regulatorów PID: PID_3Step 50

51 Typy regulatorów PID: PID_3Step 51

52 Typy regulatorów PID: PID_3Step 52
53 Typy regulatorów PID: PID_3Step 53
54 Typy regulatorów PID: PID_3Step 54
55 Typy regulatorów PID: PID_3Step 55
56 Typy regulatorów PID: PID_3Step 56
57 Typy regulatorów PID: PID_3Step 57
58 Typy regulatorów PID: PID_3Step 58
59 Typy regulatorów PID: PID_3Step 59
60 Typy regulatorów PID: PID_3Step 60

61 Typy regulatorów PID: PID_3Step 61
62 Typy regulatorów PID: PID_3Step 62
63 Typy regulatorów PID 63
64 Bibliografia [1] TIA Portal V11 Help [2]. Siemens S7-120 Easy Book 64
65 Dziękuję za uwagę!!! 65
Siemens S7-1200 Konfiguracja regulatora PID
 Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Sterowniki Programowalne sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku
 Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Układ regulacji ze sprzężeniem zwrotnym: - układ regulacji kaskadowej - układ regulacji stosunku Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania
Podstawy Automatyki. Wykład 9 - Dobór regulatorów. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Wykład 9 - Dobór regulatorów. Instytut Automatyki i Robotyki Warszawa, 2017 Dobór regulatorów Podstawową przesłanką przy wyborze rodzaju regulatora są właściwości dynamiczne obiektu regulacji. Rysunek:
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
SIMATIC S Regulator PID w sterowaniu procesami. dr inż. Damian Cetnarowicz. Plan wykładu. I n t e l i g e n t n e s y s t e m y z e
 Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Plan wykładu I n t e l i g e n t n e s y s t e m y z e s p r zężeniem wizyjnym wykład 6 Sterownik PID o Wprowadzenie o Wiadomości podstawowe o Implementacja w S7-1200 SIMATIC S7-1200 Regulator PID w sterowaniu
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Podstawy Automatyki. Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID. dr inż. Jakub Możaryn. Instytut Automatyki i Robotyki
 Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Wykład 7 - Jakość układu regulacji. Dobór nastaw regulatorów PID Instytut Automatyki i Robotyki Warszawa, 2015 Jakość układu regulacji Oprócz wymogu stabilności asymptotycznej, układom regulacji stawiane
Ćwiczenie 3 - Sterownik PLC realizacja algorytmu PID
 Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Akademia Górniczo-Hutnicza im. Stanisława Staszica w Krakowie KATEDRA AUTOMATYKI LABORATORIUM Aparatura Automatyzacji Ćwiczenie 3. Sterownik PLC realizacja algorytmu PID Wydział EAIiE kierunek AiR rok
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 12. Regulacja dwu- i trójpołożeniowa (wg. Holejko, Kościelny: Automatyka procesów ciągłych)
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Cyfrowy regulator temperatury
 Cyfrowy regulator temperatury Atrakcyjna cena Łatwa obsługa Szybkie próbkowanie Precyzyjna regulacja temperatury Bardzo dokładna regulacja temperatury Wysoka dokładność wyświetlania wartości temperatury
Cyfrowy regulator temperatury Atrakcyjna cena Łatwa obsługa Szybkie próbkowanie Precyzyjna regulacja temperatury Bardzo dokładna regulacja temperatury Wysoka dokładność wyświetlania wartości temperatury
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki
 Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Opracowano na podstawie: INSTRUKCJA Regulacja PID, badanie stabilności układów automatyki 1. Kaczorek T.: Teoria sterowania, PWN, Warszawa 1977. 2. Węgrzyn S.: Podstawy automatyki, PWN, Warszawa 1980 3.
Obiekt. Obiekt sterowania obiekt, który realizuje proces (zaplanowany).
.") SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
SWB - Systemy wbudowane w układach sterowania - wykład 13 asz 1 Obiekt sterowania Wejście Obiekt Wyjście Obiekt sterowania obiekt, który realizuje proces (zaplanowany). Fizyczny obiekt (proces, urządzenie)
Automatyka i pomiary wielkości fizykochemicznych. Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa.
 Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyka i pomiary wielkości fizykochemicznych Instrukcja do ćwiczenia VI Dobór nastaw regulatora typu PID metodą Zieglera-Nicholsa. 1. Wprowadzenie Regulator PID (regulator proporcjonalno-całkująco-różniczkujący,
Automatyzacja. Ćwiczenie 9. Transformata Laplace a sygnałów w układach automatycznej regulacji
 Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Automatyzacja Ćwiczenie 9 Transformata Laplace a sygnałów w układach automatycznej regulacji Rodzaje elementów w układach automatyki Blok: prostokąt ze strzałkami reprezentującymi jego sygnał wejściowy
Sterowanie pracą reaktora chemicznego
 Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
Sterowanie pracą reaktora chemicznego Celem ćwiczenia jest opracowanie na sterowniku programowalnym programu realizującego jednopętlowy układ regulacji a następnie dobór nastaw regulatora zapewniających
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
1.1. Wymogi bezpieczeństwa Pomoc techniczna TIA Portal V13 instalacja i konfiguracja pakietu...18
 3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Praktyka inżynierska korzystamy z tego co mamy. regulator. zespół wykonawczy. obiekt (model) Konfiguracja regulatora
 Konfiguracja regulatora") raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
raktyka inżynierska korzystamy z tego co mamy Urządzenia realizujące: - blok funkcyjny D w sterowniku LC - moduł D w sterowniku LC - regulator wielofunkcyjny - prosty regulator cyfrowy zadajnik S e CV
POLITECHNIKA GDAŃSKA
 POLITECHNIKA GDAŃSKA SEMINARIUM Z AUTOMATYKI CHŁODNICZEJ Budowa, działanie, funkcje uŝytkowe i przykłady typowego zastosowania sterowników do urządzeń chłodniczych i pomp ciepła Wykonał: Jan Mówiński SUCHiKl
POLITECHNIKA GDAŃSKA SEMINARIUM Z AUTOMATYKI CHŁODNICZEJ Budowa, działanie, funkcje uŝytkowe i przykłady typowego zastosowania sterowników do urządzeń chłodniczych i pomp ciepła Wykonał: Jan Mówiński SUCHiKl
Podstawy programowania sterowników SIMATIC S w języku LAD / Tomasz Gilewski. Legionowo, cop Spis treści
 Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Rozdział 22 Regulacja PID ogólnego przeznaczenia
 Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
Rozdział 22 Regulacja ogólnego przeznaczenia 22.1 Wstęp do regulacji Metodologia otwartej pętli może być odpowiednia dla większości zastosowań dotyczących sterowania procesami. Dzieje się tak z uwagi na
Politechnika Białostocka
 Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Automatyka i sterowania
 Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Automatyka i sterowania Układy regulacji Regulacja i sterowanie Przykłady regulacji i sterowania Funkcje realizowane przez automatykę: regulacja sterowanie zabezpieczenie optymalizacja Automatyka i sterowanie
Politechnika Warszawska Instytut Automatyki i Robotyki. Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI
 Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
Politechnika Warszawska Instytut Automatyki i Robotyki Prof. dr hab. inż. Jan Maciej Kościelny PODSTAWY AUTOMATYKI 1. Dobór rodzaju i nastaw regulatorów PID Rodzaje regulatorów 2 Regulatory dwustawne (2P)
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
1. Zbiornik mleka. woda. mleko
 Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Założenia ogólne 1. Każdy projekt realizuje zespół złożóny z max. 2 osób. 2. Projekt składa się z 3 części: - aplikacji SCADA PRO-2000; - programu sterującego - realizującego obsługę urządzeń w sterowniku;
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.2 23.12.2005 Spis treści SPIS TREŚCI... 2
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Przemysłowy Sterownik Mikroprocesorowy
 Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
Przemysłowy Sterownik Mikroprocesorowy Sp. z o.o. 41-250 Czeladź ul. Wojkowicka 21 Tel. 032 763 77 77 Fax: 032 763 75 94 www.mikster.pl mikster@mikster.pl v 1.7 17.06.2008 Spis treści SPIS TREŚCI...2 DANE
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware przykład zaawansowanego systemu
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
systemy sterowania zestawami pomp CECHY CHARAKTERYSTYCZNE sterowanie prędkością obrotową pompy zasilanej z przemiennika częstotliwości w celu zapewnienia stabilizacji ciśnienia automatyczne lub ręczne
ASQ systemy sterowania zestawami pomp
 systemy sterowania zestawami pomp ZASADA DZIAŁANIA Jednym z flagowych produktów firmy Apator Control są zestawy systemów sterowania pompami typu ASQ. Jest to rozwiązanie autorskie kadry inżynierskiej,
systemy sterowania zestawami pomp ZASADA DZIAŁANIA Jednym z flagowych produktów firmy Apator Control są zestawy systemów sterowania pompami typu ASQ. Jest to rozwiązanie autorskie kadry inżynierskiej,
Konfiguracja sterowników Horner APG do pracy w trybie Modbus RTU Master
 INFORMATOR TECHNICZNY HORNER Informator techniczny nr 10 -- grudzień 2008 Konfiguracja sterowników Horner APG do pracy w trybie Modbus RTU Master Konfiguracja sterownika MASTER Konfiguracja sterowniki
INFORMATOR TECHNICZNY HORNER Informator techniczny nr 10 -- grudzień 2008 Konfiguracja sterowników Horner APG do pracy w trybie Modbus RTU Master Konfiguracja sterownika MASTER Konfiguracja sterowniki
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Przygotowanie zadania sterowania do analizy i syntezy zestawienie schematu blokowego
Dla naszego obiektu ciągłego: przy czasie próbkowania T p =2.
 1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
1. Celem zadania drugiego jest przeprowadzenie badań symulacyjnych układu regulacji obiektu G(s), z którym zapoznaliśmy się w zadaniu pierwszym, i regulatorem cyfrowym PID, którego parametry zostaną wyznaczone
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.
 Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy Anti-windup.") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Silnik prądu stałego (NI Elvis 2) Dobieranie nastaw regulatorów P, PI, PID. Filtr przeciwnasyceniowy
Podstawy Automatyki. Wykład 7 - obiekty regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Wykład 7 - obiekty regulacji Instytut Automatyki i Robotyki Warszawa, 2018 Obiekty regulacji Obiekt regulacji Obiektem regulacji nazywamy proces technologiczny podlegający oddziaływaniu zakłóceń, zachodzący
Inżynieria Bezpieczeństwa I stopień (I stopień / II stopień) ogólnoakademicki (ogólnoakademicki / praktyczny)
 ogólnoakademicki (ogólnoakademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Dynamika procesu zmienna stała. programowalne zmiany parametrów r.
 Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
Sterowanie adaptacyjne Sterowanie adaptacyjne polega na dostosowywaniu (adaptacji) nastaw regulatora do zmian parametrów obiektu (w trakcie pracy) Techniki adaptacji Dynamika procesu zmienna stała regulator
O autorze... 9 Wprowadzenie... 11
 Spis tre ci O autorze... 9 Wprowadzenie... 11 Rozdzia 1. Sterownik przemys owy... 15 Sterownik S7-1200... 15 Budowa zewn trzna... 16 Budowa wewn trzna... 19 Cykl programu oraz tryby pracy... 21 Zestaw
Spis tre ci O autorze... 9 Wprowadzenie... 11 Rozdzia 1. Sterownik przemys owy... 15 Sterownik S7-1200... 15 Budowa zewn trzna... 16 Budowa wewn trzna... 19 Cykl programu oraz tryby pracy... 21 Zestaw
1. Regulatory ciągłe liniowe.
 Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
Laboratorium Podstaw Inżynierii Sterowania Ćwiczenie: Regulacja ciągła PID 1. Regulatory ciągłe liniowe. Zadaniem regulatora w układzie regulacji automatycznej jest wytworzenie sygnału sterującego u(t),
POLITECHNIKA GDAOSKA
 POLITECHNIKA GDAOSKA WYDZIAŁ MECHANICZNY AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sterowniki do urządzeń chłodniczych: budowa + cechy techniczne + funkcje użytkowe. Gdańsk 2008 Wykonał Korpalski Radosław
POLITECHNIKA GDAOSKA WYDZIAŁ MECHANICZNY AUTOMATYKA CHŁODNICZA I KLIMATYZACYJNA Temat: Sterowniki do urządzeń chłodniczych: budowa + cechy techniczne + funkcje użytkowe. Gdańsk 2008 Wykonał Korpalski Radosław
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT i AT )
") SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT-503 1141-000 i AT-503-1161-000 ) Regulator temperatury AT-503 wykorzystywany jest do zaawansowanej regulacji temperatury
SKRÓCONY OPIS REGULATORA AT-503 ( opracowanie własne TELMATIK - dotyczy modeli AT-503 1141-000 i AT-503-1161-000 ) Regulator temperatury AT-503 wykorzystywany jest do zaawansowanej regulacji temperatury
Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control
 Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control Rozwiązując zadanie sterowania układu, automatyk powinien przede wszystkim sporządzić odpowiedni jego opis. Chcąc np. automatycznie sterować
Identyfikacja obiektu i optymalizacja nastaw w Standard PID Control Rozwiązując zadanie sterowania układu, automatyk powinien przede wszystkim sporządzić odpowiedni jego opis. Chcąc np. automatycznie sterować
Konfiguracja regulatora PID
 Konfiguracja regulatora PID Simatic Step 7 Basic v10.5 S7-1200 PLC FAQ Lipiec 2010 Spis treści 1 Opis obiektu regulacji PID 3 2 Wstęp do nowego projektu. 4 2.1 Nowy projekt... 4 2.2 Dodanie nowego urządzenia...
Konfiguracja regulatora PID Simatic Step 7 Basic v10.5 S7-1200 PLC FAQ Lipiec 2010 Spis treści 1 Opis obiektu regulacji PID 3 2 Wstęp do nowego projektu. 4 2.1 Nowy projekt... 4 2.2 Dodanie nowego urządzenia...
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Specjalność: Komputerowe systemy sterowania i diagnostyki
 Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Specjalność: Komputerowe systemy sterowania i diagnostyki Rozkład zajęć w sem. (godz. w tygodniu) Lp Nazwa przedmiotu ECTS sem. 1 sem. 2 sem. 3 sem. 4 sem. 5 sem. 6 sem. 7 w c l p w c l p w c l p w c l
Automatyka przemysłowa na wybranych obiektach. mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław
 Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
Automatyka przemysłowa na wybranych obiektach mgr inż. Artur Jurneczko PROCOM SYSTEM S.A., ul. Stargardzka 8a, 54-156 Wrocław 2 Cele prezentacji Celem prezentacji jest przybliżenie automatyki przemysłowej
II. STEROWANIE I REGULACJA AUTOMATYCZNA
 II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
II. STEROWANIE I REGULACJA AUTOMATYCZNA 1. STEROWANIE RĘCZNE W UKŁADZIE ZAMKNIĘTYM Schemat zamkniętego układu sterowania ręcznego przedstawia rysunek 1. Centralnym elementem układu jest obiekt sterowania
Regulatory o działaniu ciągłym P, I, PI, PD, PID
 Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
Regulatory o działaniu ciągłym P, I, PI, PD, PID Regulatory o działaniu ciągłym (analogowym) zmieniają wartość wielkości sterującej obiektem w sposób ciągły, tzn. wielkość ta może przyjmować wszystkie
PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa
 Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
Rok akademicki 2015/2016 Semestr letni PODSTAWY AUTOMATYKI I MIERNICTWA PRZEMYSŁOWEGO Laboratorium 3 Regulatory PID i ich strojenie, Regulacja dwupołożeniowa Wstęp teoretyczny: W układzie regulacji określa
POLITECHNIKA POZNAŃSKA. Wydział Budowy Maszyn i Zarządzania MECHATRONIKA. Profile dyplomowania Konstrukcje Mechatroniczne
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA Profile dyplomowania Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Profile dyplomowania: Konstrukcje
PROGRAMOWANIE UKŁADÓW REGULACJI CIĄGŁEJ PCS
 Ryszard Zankowski Ośrodek Kształcenia Zawodogo i Ustawicznego ŁCDNiKP PROGRAMOWANIE UKŁADÓW REGULACJI CIĄGŁEJ PCS IV etap edukacji Modułowy program nauczania: Technik mechatronik 311410 Kwalifikacja: Projektowanie
Ryszard Zankowski Ośrodek Kształcenia Zawodogo i Ustawicznego ŁCDNiKP PROGRAMOWANIE UKŁADÓW REGULACJI CIĄGŁEJ PCS IV etap edukacji Modułowy program nauczania: Technik mechatronik 311410 Kwalifikacja: Projektowanie
Wysokowydajne falowniki wektorowe Micno KE300.
 Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Wysokowydajne falowniki wektorowe Micno KE300. Firma Shenzhen Micno Electric Co. jest przedsiębiorstwem zajmującym się zaawansowanymi technologiami. Specjalizuje się w pracach badawczorozwojowych, produkcji,
Sterownik nagrzewnic elektrycznych HE module
 Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
Sterownik nagrzewnic elektrycznych HE module Dokumentacja Techniczna 1 1. Dane techniczne Napięcie zasilania: 24 V~ (+/- 10%) Wejście napięciowe A/C: 0 10 V Wejścia cyfrowe DI 1 DI 3: 0 24 V~ Wyjście przekaźnikowe
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
POLITECHNIKA POZNAŃSKA Wydział Budowy Maszyn i Zarządzania MECHATRONIKA SPECJALNOŚĆ Konstrukcje Mechatroniczne Prof. dr hab. inż. Andrzej Milecki Kształcenie Specjalności: Konstrukcje Mechatroniczne Inżynieria
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Automatyka przemysłowa i sterowniki PLC Kod przedmiotu
 Automatyka przemysłowa i sterowniki PLC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Automatyka przemysłowa i sterowniki PLC Kod przedmiotu 06.2-WE-EP-APiSPLC Wydział Kierunek Wydział Informatyki,
Automatyka przemysłowa i sterowniki PLC - opis przedmiotu Informacje ogólne Nazwa przedmiotu Automatyka przemysłowa i sterowniki PLC Kod przedmiotu 06.2-WE-EP-APiSPLC Wydział Kierunek Wydział Informatyki,
Sterownik nagrzewnic elektrycznych ELP-HE24/6
 Sterownik nagrzewnic elektrycznych ELP-HE24/6 Dokumentacja techniczna 1 1. OPIS ELEMENTÓW STERUJĄCYCH I KONTROLNYCH Wyjścia przekaźnika alarmowego Wejście analogowe 0-10V Wejścia cyfrowe +24V Wyjście 0,5A
Sterownik nagrzewnic elektrycznych ELP-HE24/6 Dokumentacja techniczna 1 1. OPIS ELEMENTÓW STERUJĄCYCH I KONTROLNYCH Wyjścia przekaźnika alarmowego Wejście analogowe 0-10V Wejścia cyfrowe +24V Wyjście 0,5A
KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK
 Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Inżynieria Rolnicza 8(117)/2009 KOMPUTEROWY MODEL UKŁADU STEROWANIA MIKROKLIMATEM W PRZECHOWALNI JABŁEK Ewa Wachowicz, Piotr Grudziński Katedra Automatyki, Politechnika Koszalińska Streszczenie. W pracy
Zadania do ćwiczeń laboratoryjnych Systemy rozproszone automatyki - laboratorium
 1. Komunikacja PLC falownik, poprzez sieć Profibus DP Stanowiska A-PLC-5 oraz B-FS-4 1.1. Urządzenia i narzędzia 1.1.1. Sterownik SIMATIC S7-315 2DP (z wbudowanym portem Profibus DP). 1.1.2. Falownik MicroMaster440
1. Komunikacja PLC falownik, poprzez sieć Profibus DP Stanowiska A-PLC-5 oraz B-FS-4 1.1. Urządzenia i narzędzia 1.1.1. Sterownik SIMATIC S7-315 2DP (z wbudowanym portem Profibus DP). 1.1.2. Falownik MicroMaster440
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
NX700 PLC www.atcontrol.pl
 NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
Elektrotechnika II Stopień (I stopień / II stopień) Ogólno akademicki (ogólno akademicki / praktyczny)
 Ogólno akademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI
 Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
Podstawy automatyki / Józef Lisowski. Gdynia, 2015 Spis treści PRZEDMOWA 9 WSTĘP 11 1. POJĘCIA PODSTAWOWE I RODZAJE UKŁADÓW AUTOMATYKI 17 1.1. Automatyka, sterowanie i regulacja 17 1.2. Obiekt regulacji
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Automatyka zastosowania, metody i narzędzia, perspektywy Synteza systemów sterowania z wykorzystaniem regulatorów
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 2017/2018
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska
 Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska") Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
Podstawy Automatyki. Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych. dr inż. Jakub Możaryn. Warszawa, 2015. Instytut Automatyki i Robotyki
 Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Wykład 8 - Wprowadzenie do automatyki procesów dyskretnych Instytut Automatyki i Robotyki Warszawa, 2015 Literatura Zieliński C.: Podstawy projektowania układów cyfrowych. PWN, Warszawa, 2003 Traczyk W.:
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki
 Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Politechnika Warszawska Wydział Samochodów i Maszyn Roboczych Instytut Podstaw Budowy Maszyn Zakład Mechaniki http://www.ipbm.simr.pw.edu.pl/ Teoria maszyn i podstawy automatyki semestr zimowy 206/207
Regulacja prędkości posuwu belki na prowadnicach pionowych przy wykorzystaniu sterownika Versa Max
 Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Instytut Automatyki i Robotyki Prowadzący(a) Grupa Zespół data ćwiczenia Lp. Nazwisko i imię Ocena 1. 2. 3. LABORATORIUM 4. PODSTAW 5. AUTOMATYKI Ćwiczenie PA9b 1 Regulacja prędkości posuwu belki na prowadnicach
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II
 Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i Regulacja Automatyczna Laboratorium Zagadnienia Seria II Zagadnienia na ocenę 3.0 1. Podaj transmitancję oraz naszkicuj teoretyczną odpowiedź skokową układu całkującego z inercją 1-go rzędu.
Automatyka i robotyka ETP2005L. Laboratorium semestr zimowy
 Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Automatyka i robotyka ETP2005L Laboratorium semestr zimowy 2017-2018 Liniowe człony automatyki x(t) wymuszenie CZŁON (element) OBIEKT AUTOMATYKI y(t) odpowiedź Modelowanie matematyczne obiektów automatyki
Elastyczne systemy wytwarzania
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
Automatyka w inżynierii środowiska. Wykład 1
 Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Automatyka w inżynierii środowiska Wykład 1 Wstępne informacje Podstawa zaliczenia wykładu: kolokwium 21.01.2012 Obecność na wykładach: zalecana. Zakres tematyczny przedmiotu: (10 godzin wykładów) Standardowe
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
I. DANE TECHNICZNE II. INSTRUKCJA UśYTKOWANIA... 4
 Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
Sterownik CU-210 I. DANE TECHNICZNE... 2 1 Opis elementów sterujących i kontrolnych...2 2 Budowa... 3 3 Dane znamionowe... 3 II. INSTRUKCJA UśYTKOWANIA... 4 1 Opis działania... 4 1.1 Załączenie i wyłączenie
Ćwiczenia z S7-1200. S7-1200 jako Profinet-IO Controller. FAQ Marzec 2012
 Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Moduł nagrzewnicy elektrycznej EL-HE
 1. Dane techniczne: Moduł nagrzewnicy elektrycznej EL-HE Napięcie zasilania: 24 V~ (+/- 10%) Wymiary[mm] : 70 x 90 x 58 Możliwość sterowania binarnego Regulowane parametry pracy : 12 Wyświetlacz LED Port
1. Dane techniczne: Moduł nagrzewnicy elektrycznej EL-HE Napięcie zasilania: 24 V~ (+/- 10%) Wymiary[mm] : 70 x 90 x 58 Możliwość sterowania binarnego Regulowane parametry pracy : 12 Wyświetlacz LED Port