SYSTEMY CZASU RZECZYWISTEGO (SCR)
|
|
|
- Sebastian Grabowski
- 5 lat temu
- Przeglądów:
Transkrypt
1 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem PID, umożliwiającego realizację zadania podążania autonomicznego pojazdu mobilnego ZumoRoboKiss2 za czarną linią Ćwiczenie Laboratoryjne nr 4 Opracowanie: Tomasz Rutkowski, dr inż. Gdańsk, /7
2 Wprowadzenie Przed przystąpieniem do zajęć laboratoryjnych należy zapoznać się z opisem dydaktycznych pojazdów ZumoRoboKiss2 zawartym w pliku: SCR_Lab_04_opis_ZumoRoboKiss2.pdf W trakcie zajęć pojazdy ZumoRoboKiss2 programowane będą w środowiskach: Matlab/Simulink (R2014 lub R2015!!!), oraz Arduino IDE. Dla dotychczas niewtajemniczonych w programowanie w środowisku Arduino IDE zalecana jest lektura materiału związanego z szybkim wprowadzeniem w programowanie w środowisku Arduino IDE, do którego przykładowe linki umieszczono w wyżej wspomnianym dokumencie SCR_Lab_04_opis_ZumoRoboKiss2.pdf (pozycje [7] i [8]). Kolejne zadania do realizacji w trakcie zajęć laboratoryjnych dają możliwość szczegółowego przeanalizowania sposobu programowania ZumoRoboKiss2 oraz niezbędnych elementów dedykowanych bibliotek w środowiskach Matlab/Simulink i Arduino IDE, w celu realizacji zadania głównego laboratorium: implementacji i weryfikacji algorytmu sterowania z regulatorem PID, umożliwiającego realizację zadania podążania autonomicznego pojazdu mobilnego ZumoRoboKiss2 za czarną linią. Plik programu dla Matlab/Simulink (pliki *.slx), który umożliwia realizację Zadania 1 można odnaleźć w dołączonym archiwum SCR_ZumoRoboKiss2_ZADANIA.zip. Również pliki projektów dla środowiska Arduino IDE (pliki tekstowe *.ino), które umożliwiają realizację zadań 2, 3, 4 i 5 można odnaleźć w archiwum SCR_ZumoRoboKiss2_ZADANIA.zip. Podłączenie układu Arduino UNO przewodem USB do komputera PC powoduje przypisanie temu urządzeniu odpowiedniego portu COM w systemie operacyjnym - można to zweryfikować w Windows za pomocą Menadżera urządzeń, Odpowiednia identyfikacja tego portu jak i poprawne odwoływanie się do niego z poziomu aplikacji narzędziowych (Matlab/Simulink, Arduino IDE) umożliwia poprawne wgranie skompilowanych w trakcie zajęć laboratoryjnych programów do układu Arduino UNO oraz komunikację szeregowo z tym układem. 2/7
3 Zadanie 0 Przeanalizować (burza mózgów) w jaki sposób można by wykorzystać odbiciowe czujniki koloru (para: fototranzystor i podczerwona dioda nadawcza) w projektowanym algorytmie sterowania, realizującym zadanie podążania robota za czarną linią. Należy, rozważyć trzy następujące przypadki: wykorzystanie jednego odbiciowego czujnika koloru, wykorzystanie dwóch obiciowych czujników koloru, wykorzystanie trzech i więcej odbiciowych czujników koloru. Następnie przeanalizować w jaki sposób można by wykorzystać jeden sygnał sterujący wypracowany przez regulator PID by sterować dwoma silnikami pojazdu, napędzającymi odpowiednio koła/gąsienice z jego lewej i prawej strony. Należy zwrócić uwagę na rozstawienie odbiciowych czujników koloru, na grubość czarnej linii na planszach znajdujących się w laboratorium oraz na sposób interpretowania danych dostarczonych przez zestaw czujników (osobne dane z każdego z czujników, czy jedna dana/informacja wypracowana na podstawie odczytów ze wszystkich czujników). Pamiętając, że silniki (urządzenia wykonawcze) mają swoje rzeczywiste ograniczenia (np. napięcie zasilania) zaproponować metodę/metody ograniczenia wartości ich sygnałów sterujących tak by były one akceptowalne przez urządzenia wykonawcze. Zadanie 1 Matlab/Simulink Przeanalizować i eksperymentalnie zweryfikować przykładową implementacją algorytmu wykorzystującego regulator PID, który umożliwia pojazdowi ZumoRoboKiss2 realizację zadania podążania za czarną linią (np. w postaci ścieżki o kształcie - odpowiednie plansze do wykorzystania udostępni prowadzący). Strukturę zaproponowanego algorytmu zapisano w projekcie Matlaba/Simulinka SCR_Zad_01_MS_PID.slx, który można odnaleźć w archiwum SCR_ZumoRoboKiss2_ZADANIA.zip. W zadaniu należy: a) zapoznać się ze strukturą pliku SCR_Zad_01_MS_PID.slx oraz sposobem działania zaproponowanego algorytmu (Rys. 1), b) zapoznać się z opisem bloków ZumoMotors oraz ZumoReflectanceSensor, przy czym szczególną uwagę należy zwrócić na ich możliwości konfiguracyjne (Rys. 2), c) eksperymentalnie zweryfikować jakość poruszania się pojazdu po czarnej linii w zależności od wartości parametrów: regulatora PID: Kp, Ki i Kd, bazowej mocy pracy obu silników: mootor_sp, okresu próbkowania listwy czujników odbiciowych: SamplingTime_ZRS, kroku procedury numerycznej: SampleTime_Solver. 3/7
 dla przypadku opisanego w poprzednim podpunkcie wypisać również wartości parametrów: line_sp, mootor_sp")
4 W sprawozdaniu należy: a) zapisać wartości dobranych parametrów regulatora PID (Kp, Ki, Kd,) dla których zadanie podążania za czarną linią realizowane jest najlepiej, przy czym należy również zdefiniować słownie przyjęte kryterium/kryteria oceny jakości realizacji tego zadania, b) dla przypadku opisanego w poprzednim podpunkcie wypisać również wartości parametrów: line_sp, mootor_sp SamplingTime_ZRS oraz SampleTime_Solver, c) na podstawie obserwacji zachowania pojazdu mobilnego ZumoRoboKiss2 w trakcie eksperymentów, uzasadnić dobór wartości parametrów SamplingTime_ZRS oraz SampleTime_Solver. Przed kompilacją projektu w Simulinku należy wybrać typ platformy dla której ma zostać wygenerowany kod. W tym przypadku po kliknięciu lewym przyciskiem myszy na ikonę w głównym oknie projektu (czerwony kwadrat na Rys.1), otworzy się okno parametrów symulacji, w którym z listy po lewej stronie należy wybrać opcję Run on Target Hardware a w prawym oknie parametr Target Hardware ustawić na wartość Arduino Uno. W parametrach symulacji należy też wybrać solver ode1 ze stałym krokiem Fxed-step, którego wartość Fxed-step size zdefiniowana jest jako parametr SampleTime_Solver. Aby poprawnie skompilować plik projektu SCR_Zad_01_MS_PID.slx w Workspace głównym Matlaba należy zdefiniować następujące zmienne i przypisać im odpowiednie wartości: line_sp, Kp, Ki, Kd, mootor_sp, SamplingTime_ZRS, SampleTime_Solver. Kompilacja projektu w Simulinku i zaprogramowanie układu Arduino Uno w pojeździe ZumoRoboKiss2, następuje po kliknięciu lewym przyciskiem myszy na ikonę w głównym oknie projektu (czerwone kółko na Rys.1). Poszczególne testy, z poruszającym się robotem, należy przeprowadzać bezpośrednio w kojcu bezpieczeństwa, w miejscu wskazanym przez prowadzącego. Dopiero gdy robot znajduje się w kojcu można zmienić stan przycisku głównego zasilania na płycie głównej ZumoRoboKiss2 z pozycji OFF na pozycję ON! Rys. 1. Struktura pliku SCR_Zad_01_MS_PID.slx Mataba/Simulinka 4/7

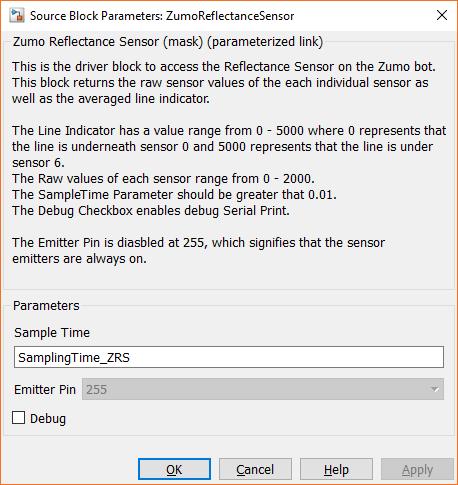
5 Rys. 2. Opis bloku ZumoMotors Rys. 3. Opis bloku ZumoReflectanceSensor 5/7
6 Kolejne Zadania od 2 do 5 są jedynie środkiem do realizacji Zadania 6!!! Zadanie 2 - Arduino IDE Przeanalizować działanie przykładowego kodu SCR_Zad_02_button_led.ino przedstawiającego podstawowe możliwości oprogramowania przycisku użytkownika i diody Led pojazdu ZumoRoboKiss2. Testy przeprowadzać bezpośrednio na stanowisku laboratoryjnym (przycisk głównego zasilania na płycie głównej ZumoRoboKiss2 w pozycji OFF). Zadanie 3 - Arduino IDE Przeanalizować działanie przykładowego kodu SCR_Zad_03_button_led_buzzer.ino przedstawiającego podstawowe, dodatkowe możliwości (względem Zadania 2) oprogramowania buzzera pojazdu ZumoRoboKiss2. Testy przeprowadzać bezpośrednio na stanowisku laboratoryjnym (przycisk głównego zasilania na płycie głównej ZumoRoboKiss2 w pozycji OFF). Zadanie 4 - Arduino IDE Przeanalizować działanie przykładowego kodu SCR_Zad_04a_reflectance_sensor.ino oraz kodu SCR_Zad_04b_reflectance_sensor.ino przedstawiającego podstawowe, dodatkowe możliwości (względem Zadań 2 i 3) oprogramowania listwy czujników odbiciowych oraz interfejsu komunikacji szeregowej pojazdu ZumoRoboKiss2. W kodzie 4a przedstawiono sposób czytania stanu poszczególnych czujników odbiciowych i wysyłania informacji przez interfejs szeregowy. Natomiast, w kodzie 4b przedstawiono sposób estymacji położenia czarnej linii względem listwy czujników odbiciowych na podstawie ważonego, średniego stanu wszystkich czujników. Testy przeprowadzać bezpośrednio na stanowisku laboratoryjnym z wykorzystaniem kartek z czarnymi liniami (przycisk głównego zasilania na płycie głównej ZumoRoboKiss2 w pozycji OFF). 6/7
7 Zadanie 5 - Arduino IDE Przeanalizować działanie przykładowego kodu SCR_Zad_05_button_motors.ino przedstawiającego podstawowe, dodatkowe możliwości (względem Zadań 2, 3 i 4) oprogramowania pracy silników napędowych pojazdu ZumoRoboKiss2. Testy, z poruszającym się robotem, przeprowadzać bezpośrednio w kojcu bezpieczeństwa w miejscu wskazanym przez prowadzącego (gdy robot znajduje się w kojcu następuje zmiana stanu przycisku głównego zasilania na płycie głównej ZumoRoboKiss2 z pozycji OFF na pozycję ON). Pojazd powinien ruszyć dopiero po 5 sekundach!!! Zadanie 6 - Arduino IDE - Regulator PID Na podstawie doświadczeń z realizacji poprzednich zadań, należy opracować i zaimplementować algorytm, oparty o dyskretną wersję regulatora PID z Zadania 1, realizujący zadanie podążania robota ZumoRoboKiss2 za czarna linią. W zadaniu należy: zaimplementować algorytm oparty o dyskretną wersję regulatora PID, z odpowiednimi ograniczeniami sygnałów sterujących, oszacować czas trwania głównej pętli programu realizującej algorytm regulatora PID (w tym celu można wykorzystać funkcje millis() lub micros(), natomiast uśrednioną wartość czasu trwania głównej pętli programu można wysłać z układu Arduino Uno do komputera PC za pomocą interfejsu komunikacji szeregowej), w fazie eksperymentalnej weryfikacji opracowanego algorytmu, dobrać eksperymentalnie parametry zaimplementowanego regulatora PID, tak aby jakość podążania za czarną linią realizowana była jak najlepiej (w tym celu należy wykorzystać doświadczenie wynikające z realizacji Zadania 1). Zwrócić uwagę na ograniczenia związane z pracą silników <-400, 400>. Testy, z poruszającym się robotem, przeprowadzać bezpośrednio w kojcu bezpieczeństwa w miejscu wskazanym przez prowadzącego (gdy robot znajduje się w kojcu następuje zmiana stanu przycisku głównego zasilania płyty ZumoRoboKiss2 z pozycji OFF na pozycję ON). Pojazd powinien ruszyć dopiero po 5 sekundach!!! W sprawozdaniu należy: a) naszkicować ogólną strukturę układu sterowania robotem ZumoRoboKiss2 w zadaniu podążania za czarna linią, b) zapisać w postaci pseudokodu algorytm zaimplementowanego dyskretnego regulatora PID, c) zapisać dobrane eksperymentalnie parametry zaimplementowanego dyskretnego regulatora PID, d) zapisać oszacowany, uśredniony czas trwania głównej pętli programu. 7/7
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Opis stanowiska laboratoryjnego do projektowania i weryfikacji algorytmów sterujących autonomicznych pojazdów
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Podstawy programowanie systemów wbudowanych na bazie platformy sprzętowo-programowej
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program
 LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
LabVIEW PLATFORMA EDUKACYJNA Lekcja 5 LabVIEW i Arduino konfiguracja środowiska i pierwszy program Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie środowiska LabVIEW 2016
Cyfrowe Przetwarzanie Obrazów i Sygnałów
 Cyfrowe Przetwarzanie Obrazów i Sygnałów Laboratorium EX0 Wprowadzenie Joanna Ratajczak, Wrocław, 2018 1 Cel i zakres ćwiczenia Celem ćwiczenia jest zapoznanie się ze środowiskiem Matlab/Simulink wraz
Cyfrowe Przetwarzanie Obrazów i Sygnałów Laboratorium EX0 Wprowadzenie Joanna Ratajczak, Wrocław, 2018 1 Cel i zakres ćwiczenia Celem ćwiczenia jest zapoznanie się ze środowiskiem Matlab/Simulink wraz
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawowe kroki programowania zestawu uruchomieniowego ZL9AVR z systemem operacyjnym NutOS w środowisku
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawowe kroki programowania zestawu uruchomieniowego ZL9AVR z systemem operacyjnym NutOS w środowisku
Electronic Infosystems
 Department of Optoelectronics and Electronic Systems Faculty of Electronics, Telecommunications and Informatics Gdansk University of Technology Electronic Infosystems Microserver TCP/IP with CS8900A Ethernet
Department of Optoelectronics and Electronic Systems Faculty of Electronics, Telecommunications and Informatics Gdansk University of Technology Electronic Infosystems Microserver TCP/IP with CS8900A Ethernet
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink.
 Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
STEROWNIK TUBY LED STM-64
 STEROWNIK TUBY LED STM-64 INSTRUKCJA OBSŁUGI DLA WERSJI OPROGRAMOWANIA 1.1 WWW.SIGMA.NET.PL OPIS OGÓLNY Urządzenie przeznaczone jest do sterowania tubami led. Dzięki rozbudowanym funkcjom wyświetla bardzo
STEROWNIK TUBY LED STM-64 INSTRUKCJA OBSŁUGI DLA WERSJI OPROGRAMOWANIA 1.1 WWW.SIGMA.NET.PL OPIS OGÓLNY Urządzenie przeznaczone jest do sterowania tubami led. Dzięki rozbudowanym funkcjom wyświetla bardzo
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Materiały dodatkowe. Simulink PLC Coder
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus. DODATEK NR 4 Instrukcja laboratoryjna
 Wydział Informatyki i Zarządzania Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus DODATEK NR 4 Instrukcja laboratoryjna. Opracował: Paweł Obraniak Wrocław 2014
Wydział Informatyki i Zarządzania Opracowanie ćwiczenia laboratoryjnego dotyczącego wykorzystania sieci przemysłowej Profibus DODATEK NR 4 Instrukcja laboratoryjna. Opracował: Paweł Obraniak Wrocław 2014
Politechnika Łódzka. Instytut Systemów Inżynierii Elektrycznej
 Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
Politechnika Łódzka Instytut Systemów Inżynierii Elektrycznej Laboratorium komputerowych systemów pomiarowych Ćwiczenie 8 Wykorzystanie modułów FieldPoint w komputerowych systemach pomiarowych 1. Wprowadzenie
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Instrukcja aktualizacji oprogramowania. Wersja dokumentu: 01i00 Aktualizacja:
 Instrukcja aktualizacji oprogramowania Wersja dokumentu: 01i00 Aktualizacja: 2016-03-11 Uwagi Inne dokumenty dotyczące obsługi urządzeń można pobrać ze strony energetyka.itr.org.pl Przed aktualizacją oprogramowania
Instrukcja aktualizacji oprogramowania Wersja dokumentu: 01i00 Aktualizacja: 2016-03-11 Uwagi Inne dokumenty dotyczące obsługi urządzeń można pobrać ze strony energetyka.itr.org.pl Przed aktualizacją oprogramowania
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRYKI LABORATORIUM INTELIGENTNYCH INSTALACJI ELEKTRYCZNYCH
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRYKI LABORATORIUM INTELIGENTNYCH INSTALACJI ELEKTRYCZNYCH Wprowadzenie do oprogramowania firmowego Eaton RF-System (na podstawie dokumentacji
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRYKI LABORATORIUM INTELIGENTNYCH INSTALACJI ELEKTRYCZNYCH Wprowadzenie do oprogramowania firmowego Eaton RF-System (na podstawie dokumentacji
Projekt i wykonanie robota klasy Micromouse
 Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Projekt i wykonanie robota klasy Micromouse AUTOR: KAMIL BUGDOŁ PROMOTOR: DR HAB. INŻ. WOJCIECH SKARKA, PROF. NZW. W POL. ŚL. OPIEKUN: DR INŻ. WAWRZYNIEC PANFIL Wstęp Cel pracy Celem projektu jest zaprojektowanie
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawowe kroki programowania zestawu uruchomieniowego ZL9AVR z systemem operacyjnym NutOS w środowisku
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawowe kroki programowania zestawu uruchomieniowego ZL9AVR z systemem operacyjnym NutOS w środowisku
Parametryzacja przetworników analogowocyfrowych
 Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Parametryzacja przetworników analogowocyfrowych wersja: 05.2015 1. Cel ćwiczenia Celem ćwiczenia jest zaprezentowanie istoty działania przetworników analogowo-cyfrowych (ADC analog-to-digital converter),
Lista zadań nr 1. Zagadnienia stosowanie sieci Petriego (ang. Petri net) jako narzędzia do modelowania algorytmów sterowania procesami
 jako narzędzia do modelowania algorytmów sterowania procesami") Warsztaty Koła Naukowego SMART dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 1 Zagadnienia stosowanie sieci Petriego (ang. Petri net) jako narzędzia do modelowania
Warsztaty Koła Naukowego SMART dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 1 Zagadnienia stosowanie sieci Petriego (ang. Petri net) jako narzędzia do modelowania
SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Kable przyłączeniowe oraz podstawowe metody testowania
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Kable przyłączeniowe oraz podstawowe metody testowania
Funkcjonowanie i budowa modelu układu regulacji temperatury. Jakub Rotkiewicz AIR 2018
 Funkcjonowanie i budowa modelu układu regulacji temperatury Jakub Rotkiewicz AIR 2018 Opis i przeznaczenie układu Przedmiotem prezentacji jest układ regulacji umożliwiający utrzymywanie temperatury na
Funkcjonowanie i budowa modelu układu regulacji temperatury Jakub Rotkiewicz AIR 2018 Opis i przeznaczenie układu Przedmiotem prezentacji jest układ regulacji umożliwiający utrzymywanie temperatury na
SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
 SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE, AiR r. I, sem. II Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE, AiR r. I, sem. II Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
Politechnika Śląska w Gliwicach
 Politechnika Śląska w Gliwicach Wydział Automatyki, Elektroniki i Informatyki LABORATORIUM PRZEDMIOTU SYSTEMY MIKROPROCESOROWE ĆWICZENIE 1 Układy wejścia i wyjścia mikrokontrolera ATXMega128A1 1 1 Cel
Politechnika Śląska w Gliwicach Wydział Automatyki, Elektroniki i Informatyki LABORATORIUM PRZEDMIOTU SYSTEMY MIKROPROCESOROWE ĆWICZENIE 1 Układy wejścia i wyjścia mikrokontrolera ATXMega128A1 1 1 Cel
Ćwiczenie 7: WYKONANIE INSTALACJI kontroli dostępu jednego Przejścia REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U INSTALACJA URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 7: WYKONANIE INSTALACJI kontroli dostępu jednego Przejścia Opracował mgr inż.
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U INSTALACJA URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 7: WYKONANIE INSTALACJI kontroli dostępu jednego Przejścia Opracował mgr inż.
Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0
 Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0 Wersja z dnia: 2017-08-21 Spis treści Opis... 3 1. Zasady bezpieczeństwa... 3 Instalacja... 3 Użytkowanie...
Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0 Wersja z dnia: 2017-08-21 Spis treści Opis... 3 1. Zasady bezpieczeństwa... 3 Instalacja... 3 Użytkowanie...
Materiały dodatkowe. Raspberry Pi
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Raspberry Pi Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i służą
SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Prosty serwis internetowy oparty o zestaw powiązanych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Prosty serwis internetowy oparty o zestaw powiązanych
WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA
 WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Ustawić przełącznik nr 5 zgodnie z typem czujnika. 2.1. Niezałączony czujnik Halla ewentualnie
WARIATOR WYPRZEDZENIA ZAPŁONU WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Ustawić przełącznik nr 5 zgodnie z typem czujnika. 2.1. Niezałączony czujnik Halla ewentualnie
DOKUMENTACJA PROJEKTU
 Warszawa, dn. 16.12.2015r. Student: Artur Tynecki (E.EIM) atynecki@stud.elka.pw.edu.pl Prowadzący: dr inż. Mariusz Jarosław Suchenek DOKUMENTACJA PROJEKTU Projekt wykonany w ramach przedmiotu Mikrokontrolery
Warszawa, dn. 16.12.2015r. Student: Artur Tynecki (E.EIM) atynecki@stud.elka.pw.edu.pl Prowadzący: dr inż. Mariusz Jarosław Suchenek DOKUMENTACJA PROJEKTU Projekt wykonany w ramach przedmiotu Mikrokontrolery
SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Identyfikacja właściciela domeny. Identyfikacja tras
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SIECI KOMPUTEROWE I TECHNOLOGIE INTERNETOWE Temat: Identyfikacja właściciela domeny. Identyfikacja tras
Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink
 Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Materiały pomocnicze do przedmiotu Systemy Czasu Rzeczywistego Wprowadzenie do Real-Time Windows Target Toolbox Matlab/Simulink Zawartość Czym jest Real-Time Windows Target (RTWT)?... 2 Bloki wejśd i wyjśd
Tematy magisterskie: Lp. Sugerowany stopień, kierunek studiów oraz specjalność Elektrotechnika Magisterska Dr hab. inż.
 Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
Katedra Automatyki i Elektroniki Wydział Elektryczny Zgodnie z procedurą dyplomowania na Wydziale, poniżej przedstawiono tematy prac dyplomowych dla studentów Elektrotechnika oraz Telekomunikacja kończących
AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO
 ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
ĆWICZENIE LABORATORYJNE AUTOMATYKA I STEROWANIE W CHŁODNICTWIE, KLIMATYZACJI I OGRZEWNICTWIE L1 BUDOWA TERMOSTATU ELEKTRONICZNEGO Wersja: 2013-07-27-1- 1.1. Cel ćwiczenia Celem ćwiczenia jest samodzielna
Laboratorium 1 Wprowadzenie do programowania Intel Galileo
 Laboratorium 1 Wprowadzenie do programowania Intel Galileo Zakres: Laboratorium obejmuje wprowadzenie do programowania Intel Galileo Gen2 z wykorzystaniem środowiska Arduino. Celem laboratorium jest zapoznanie
Laboratorium 1 Wprowadzenie do programowania Intel Galileo Zakres: Laboratorium obejmuje wprowadzenie do programowania Intel Galileo Gen2 z wykorzystaniem środowiska Arduino. Celem laboratorium jest zapoznanie
Laboratorium Elektrycznych Systemów Inteligentnych
 Laboratorium Elektrycznych Systemów Inteligentnych Ćwiczenie 16 Programowanie komponentów systemu automatyki domowej IHC Elektryczne Systemy Inteligentne 1 Przed ćwiczeniami należy zapoznać się również
Laboratorium Elektrycznych Systemów Inteligentnych Ćwiczenie 16 Programowanie komponentów systemu automatyki domowej IHC Elektryczne Systemy Inteligentne 1 Przed ćwiczeniami należy zapoznać się również
1. Opis aplikacji. 2. Przeprowadzanie pomiarów. 3. Tworzenie sprawozdania
 1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
Lista zadań nr 5. Ścieżka projektowa Realizacja każdego z zadań odbywać się będzie zgodnie z poniższą ścieżką projektową (rys.
 Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 5 Zagadnienia stosowanie skończonych automatów stanów (ang. Finite
Sterowanie procesami dyskretnymi laboratorium dr inż. Grzegorz Bazydło G.Bazydlo@iee.uz.zgora.pl, staff.uz.zgora.pl/gbazydlo Lista zadań nr 5 Zagadnienia stosowanie skończonych automatów stanów (ang. Finite
Zagadnienia egzaminacyjne AUTOMATYKA I ROBOTYKA. Stacjonarne I-go stopnia TYP STUDIÓW STOPIEŃ STUDIÓW SPECJALNOŚĆ
 (ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
(ARK) Komputerowe sieci sterowania 1.Badania symulacyjne modeli obiektów 2.Pomiary i akwizycja danych pomiarowych 3.Protokoły transmisji danych w systemach automatyki 4.Regulator PID struktury, parametry,
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny
 Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
Laboratorium Podstaw Robotyki I Ćwiczenie Khepera dwukołowy robot mobilny 16 listopada 2006 1 Wstęp Robot Khepera to dwukołowy robot mobilny zaprojektowany do celów badawczych i edukacyjnych. Szczegółowe
Site Installer v2.4.xx
 Instrukcja programowania Site Installer v2.4.xx Strona 1 z 12 IP v1.00 Spis Treści 1. INSTALACJA... 3 1.1 Usunięcie poprzedniej wersji programu... 3 1.2 Instalowanie oprogramowania... 3 2. UŻYTKOWANIE
Instrukcja programowania Site Installer v2.4.xx Strona 1 z 12 IP v1.00 Spis Treści 1. INSTALACJA... 3 1.1 Usunięcie poprzedniej wersji programu... 3 1.2 Instalowanie oprogramowania... 3 2. UŻYTKOWANIE
Laboratorium Procesorów Sygnałowych
 Laboratorium Procesorów Sygnałowych Moduł STM32F407 Discovery GPIO, C/A, akcelerometr I. Informacje wstępne Celem ćwiczenia jest zapoznanie z: Budową i programowaniem modułu STM32 F4 Discovery Korzystaniem
Laboratorium Procesorów Sygnałowych Moduł STM32F407 Discovery GPIO, C/A, akcelerometr I. Informacje wstępne Celem ćwiczenia jest zapoznanie z: Budową i programowaniem modułu STM32 F4 Discovery Korzystaniem
Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi. Przebieg ćwiczenia
 Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Laboratorium Komputerowe Systemy Pomiarowe
 Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
Jarosław Gliwiński, Łukasz Rogacz Laboratorium Komputerowe Systemy Pomiarowe ćw. Zastosowanie standardu VISA do obsługi interfejsu RS-232C Data wykonania: 03.04.08 Data oddania: 17.04.08 Celem ćwiczenia
GRM-10 - APLIKACJA PC
 GRM-10 - APLIKACJA PC OPIS Aplikacja służy do aktualizacji oprogramowania urządzenia GRM-10 oraz jego konfiguracji z poziomu PC. W celu wykonania wskazanych czynności konieczne jest połączenie GRM-10 z
GRM-10 - APLIKACJA PC OPIS Aplikacja służy do aktualizacji oprogramowania urządzenia GRM-10 oraz jego konfiguracji z poziomu PC. W celu wykonania wskazanych czynności konieczne jest połączenie GRM-10 z
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware cz. 2 przemysłowa baza danych,
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Platforma Systemowa Wonderware cz. 2 przemysłowa baza danych,
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU
 REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U Eksploatacja URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia Opracował mgr inż.
REGIONALNE CENTRUM EDUKACJI ZAWODOWEJ W BIŁGORAJU R C E Z w B I Ł G O R A J U Eksploatacja URZĄDZEŃ ELEKTRONICZNYCH Ćwiczenie 4: Eksploatacja systemu kontroli dostępu jednego Przejścia Opracował mgr inż.
WARIATOR USTAWIENIA Białystok, Plażowa 49/1, Poland,
 WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Instrukcja programowania płytek edycji 2014
 Instrukcja programowania płytek edycji 2014 Spis treści 1. Opis płytki procesorowej (sumo_base_5)...1 1.1. Podstawowe elementy płytki...2 1.2. Pozostałe elementy płytki...3 2. Opis płytki sterującej napędami
Instrukcja programowania płytek edycji 2014 Spis treści 1. Opis płytki procesorowej (sumo_base_5)...1 1.1. Podstawowe elementy płytki...2 1.2. Pozostałe elementy płytki...3 2. Opis płytki sterującej napędami
Bezpieczeństwo informacji oparte o kryptografię kwantową
 WYŻSZA SZKOŁA BIZNESU W DĄBROWIE GÓRNICZEJ WYDZIAŁ ZARZĄDZANIA INFORMATYKI I NAUK SPOŁECZNYCH Instrukcja do laboratorium z przedmiotu: Bezpieczeństwo informacji oparte o kryptografię kwantową Instrukcja
WYŻSZA SZKOŁA BIZNESU W DĄBROWIE GÓRNICZEJ WYDZIAŁ ZARZĄDZANIA INFORMATYKI I NAUK SPOŁECZNYCH Instrukcja do laboratorium z przedmiotu: Bezpieczeństwo informacji oparte o kryptografię kwantową Instrukcja
UWAGA. Wszystkie wyniki zapisywać na dysku Dane E: Program i przebieg ćwiczenia:
 Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Cel ćwiczenia: Zapoznanie się z. metodami badania i analitycznego wyznaczania parametrów dynamicznych obiektów rzeczywistych na przykładzie mikrotermostatu oraz z metodami symulacyjnymi umożliwiającymi
Programator Kart Master - klient
 Programator Kart Master - klient Kraków 2002.11.27 SPIS TREŚCI 1 WSTĘP... 2 2 ROZPOCZĘCIE PRACY Z PROGRAMEM... 3 3 ZMIANA KLUCZA DOSTĘPU.... 4 4 GENEROWANIE KART UŻYTKOWNIKÓW... 5 1 1 Wstęp Programator
Programator Kart Master - klient Kraków 2002.11.27 SPIS TREŚCI 1 WSTĘP... 2 2 ROZPOCZĘCIE PRACY Z PROGRAMEM... 3 3 ZMIANA KLUCZA DOSTĘPU.... 4 4 GENEROWANIE KART UŻYTKOWNIKÓW... 5 1 1 Wstęp Programator
UCanlogUpdater INSTRUKCJA OBSŁUGI
 UCanlogUpdater APLIKACJA DO PROGRAMATORA O350 INSTRUKCJA OBSŁUGI SEO Electronics www.seoelectronics.pl +48 85 652 56 61 office@seoelectronics.pl sales@seoelectronics.pl Modrzewiowa 5 16-010 Wasilków POLAND
UCanlogUpdater APLIKACJA DO PROGRAMATORA O350 INSTRUKCJA OBSŁUGI SEO Electronics www.seoelectronics.pl +48 85 652 56 61 office@seoelectronics.pl sales@seoelectronics.pl Modrzewiowa 5 16-010 Wasilków POLAND
Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową.
 Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową. Wymagania systemowe: Windows XP, Windows Vista, Windows 7 Krok pierwszy- serwer: 1. Do poprawnego działania aplikacji wymagane
Instrukcja instalacji połączenia sterownika PL11-MUT24 ze stroną internetową. Wymagania systemowe: Windows XP, Windows Vista, Windows 7 Krok pierwszy- serwer: 1. Do poprawnego działania aplikacji wymagane
Materiały dodatkowe. Simulink Real-Time
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink Real-Time Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Wstęp Simulink Real-Time jest środowiskiem pozwalającym na tworzenie
Programator procesorów rodziny AVR AVR-T910
 Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Programator procesorów rodziny AVR AVR-T910 Instrukcja obsługi Opis urządzenia AVR-T910 jest urządzeniem przeznaczonym do programowania mikrokontrolerów rodziny AVR firmy ATMEL. Programator podłączany
Ćwiczenie 8 Implementacja podpisu cyfrowego opartego na standardzie X.509
 Ćwiczenie 8 Implementacja podpisu cyfrowego opartego na standardzie X.509 CEL: Poszerzenie wiadomości na temat podpisu cyfrowego oraz zastosowanie w praktyce standardu X.509. NARZĘDZIA: Oprogramowanie
Ćwiczenie 8 Implementacja podpisu cyfrowego opartego na standardzie X.509 CEL: Poszerzenie wiadomości na temat podpisu cyfrowego oraz zastosowanie w praktyce standardu X.509. NARZĘDZIA: Oprogramowanie
Moduł Komunikacyjny MCU42 do systemu AFS42
 Moduł Komunikacyjny MCU42 do systemu AFS42 IOT - Instrukcja Obsługi - Informacja Techniczna Aktualizacja 2015-05-05 13:04 www.lep.pl biuro@lep.pl 32-300 Olkusz, ul. Wspólna 9, tel/fax (32) 754 54 54, 754
Moduł Komunikacyjny MCU42 do systemu AFS42 IOT - Instrukcja Obsługi - Informacja Techniczna Aktualizacja 2015-05-05 13:04 www.lep.pl biuro@lep.pl 32-300 Olkusz, ul. Wspólna 9, tel/fax (32) 754 54 54, 754
INTERFEJS LPG/CNG FTDI USB INSTRUKCJA INSTALACJI ORAZ KONFIGURACJI URZĄDZENIA
 INTERFEJS LPG/CNG FTDI USB INSTRUKCJA INSTALACJI ORAZ KONFIGURACJI URZĄDZENIA wersja 1.0 http://www.projekt-tech.pl 1. Wymagania sprzętowe - komputer klasy PC z portem USB - system operacyjny Microsoft
INTERFEJS LPG/CNG FTDI USB INSTRUKCJA INSTALACJI ORAZ KONFIGURACJI URZĄDZENIA wersja 1.0 http://www.projekt-tech.pl 1. Wymagania sprzętowe - komputer klasy PC z portem USB - system operacyjny Microsoft
INTERFEJS SUBARU USB INSTRUKCJA OBSŁUGI strona 1/14
 INTERFEJS SUBARU USB INSTRUKCJA OBSŁUGI www.viaken.pl strona 1/14 1. BEZPIECZEŃSTWO PRACY Przed pierwszym uruchomieniem urządzenia należy uważnie przeczytać instrukcję obsługi. Urządzenie przeznaczone
INTERFEJS SUBARU USB INSTRUKCJA OBSŁUGI www.viaken.pl strona 1/14 1. BEZPIECZEŃSTWO PRACY Przed pierwszym uruchomieniem urządzenia należy uważnie przeczytać instrukcję obsługi. Urządzenie przeznaczone
INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 5v1 IU.01.04.SY5
 INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 5v1 Spis treści: 1. Wymagania systemowe...2 2. Parametry techniczne...2 3. Zestaw...2 4. Instalacja oprogramowania...3 4.1. Instalacja w systemie
INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 5v1 Spis treści: 1. Wymagania systemowe...2 2. Parametry techniczne...2 3. Zestaw...2 4. Instalacja oprogramowania...3 4.1. Instalacja w systemie
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0
 INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
INSTRUKCJA OBSŁUGI PROGRAMU INSTAR 1.0 ver. 30.01.2014 Spis treści I. Wstęp... 2 II. Transmisja danych... 3 III. Aktualizacja oprogramowania... 4 IV. Ustawienia parametrów... 4 V. Konfiguracja modemu radiowego....
INSTRUKCJA OBSŁUGI TESTERA TCR3pc
 INSTRUKCJA OBSŁUGI TESTERA TCR3pc Tester służy do sterowania pompą common rail,oraz odczytu ciśnienia z listwy common rail. Dodatkowo dostępna jest funkcja pomiaru indukcyjności cewek zaworów ciśnienia.
INSTRUKCJA OBSŁUGI TESTERA TCR3pc Tester służy do sterowania pompą common rail,oraz odczytu ciśnienia z listwy common rail. Dodatkowo dostępna jest funkcja pomiaru indukcyjności cewek zaworów ciśnienia.
Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika
 podręcznik uŝytkownika") Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika Wprowadzenie Kabel USB 2.0 do połączenia komputerów PCLinq2 to znakomite rozwiązanie do szybkiego utworzenia sieci peer-to-peer
Kabel USB 2.0 do połączenia komputerów PCLinq2 (PL-2501) podręcznik uŝytkownika Wprowadzenie Kabel USB 2.0 do połączenia komputerów PCLinq2 to znakomite rozwiązanie do szybkiego utworzenia sieci peer-to-peer
1. INSTALACJA SERWERA
 1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
Instrukcja obsługi programu PLOMP PLUS FM
 Instrukcja obsługi programu PLOMP PLUS FM Edata Polska Sp. z o.o. ul. Puławska 314 02-819 Warszawa Tel 22 545-32-40 Fax 22 678-60-29 biuro@edatapolska.pl Ver 1.04 Aplikacja PLOMP PLUS FM przeznaczona jest
Instrukcja obsługi programu PLOMP PLUS FM Edata Polska Sp. z o.o. ul. Puławska 314 02-819 Warszawa Tel 22 545-32-40 Fax 22 678-60-29 biuro@edatapolska.pl Ver 1.04 Aplikacja PLOMP PLUS FM przeznaczona jest
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie
 Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Politechnika Białostocka
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Kod przedmiotu: TS1C 622 388 Instrukcja do ćwiczeń laboratoryjnych z przedmiotu: Elektronika samochodowa Temat: Programowanie
Zespół B-D Elektrotechniki
 Zespół B-D Elektrotechniki Laboratorium Silników i układów przeniesienia napędów Temat ćwiczenia: Diagnostyka systemu Motronic z wykorzystaniem diagnoskopu KTS 530 Bosch Opracowanie: dr hab. inż. S. DUER
Zespół B-D Elektrotechniki Laboratorium Silników i układów przeniesienia napędów Temat ćwiczenia: Diagnostyka systemu Motronic z wykorzystaniem diagnoskopu KTS 530 Bosch Opracowanie: dr hab. inż. S. DUER
Tworzenie nowego projektu w asemblerze dla mikroprocesora z rodziny 8051
 Tworzenie nowego projektu w asemblerze dla mikroprocesora z rodziny 8051 Katedra Automatyki, Wydział EAIiE Akademia Górniczo-Hutnicza w Krakowie Marcin Piątek Kraków 2008 1. Ważne uwagi i definicje Poniższy
Tworzenie nowego projektu w asemblerze dla mikroprocesora z rodziny 8051 Katedra Automatyki, Wydział EAIiE Akademia Górniczo-Hutnicza w Krakowie Marcin Piątek Kraków 2008 1. Ważne uwagi i definicje Poniższy
Laborki GUI. dr Przemysław Juszczuk. Katedra Inżynierii Wiedzy
 Katedra Inżynierii Wiedzy Warunki zaliczenia w ramach ćwiczeń konieczne jest przygotowanie zestawu zadań, a także prezentacja, lub krótki opis wykonanej pracy (ostatnie, lub przedostatnie zajęcia) - w
Katedra Inżynierii Wiedzy Warunki zaliczenia w ramach ćwiczeń konieczne jest przygotowanie zestawu zadań, a także prezentacja, lub krótki opis wykonanej pracy (ostatnie, lub przedostatnie zajęcia) - w
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Instalowanie certyfikatów celem obsługi pracy urządzenia SIMOCODE pro V PN z poziomu przeglądarki internetowej w systemie Android
 Instalowanie certyfikatów celem obsługi pracy urządzenia SIMOCODE pro V PN z poziomu przeglądarki internetowej w systemie Android Wstęp Dostępna od grudnia 2013 roku jednostka podstawowa SIMOCODE pro V
Instalowanie certyfikatów celem obsługi pracy urządzenia SIMOCODE pro V PN z poziomu przeglądarki internetowej w systemie Android Wstęp Dostępna od grudnia 2013 roku jednostka podstawowa SIMOCODE pro V
Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa TECHNIKI REGULACJI AUTOMATYCZNEJ
 Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa TECHNIKI REGULACJI AUTOMATYCZNEJ Laboratorium nr 2 Podstawy środowiska Matlab/Simulink część 2 1. Cel ćwiczenia: Celem ćwiczenia jest zapoznanie
Instytut Politechniczny Państwowa Wyższa Szkoła Zawodowa TECHNIKI REGULACJI AUTOMATYCZNEJ Laboratorium nr 2 Podstawy środowiska Matlab/Simulink część 2 1. Cel ćwiczenia: Celem ćwiczenia jest zapoznanie
ĆWICZENIE 5 WPŁYW KONWEKCJI NA ROZKŁAD TEMPERATURY W POMIESZCZENIU
 ĆWICZENIE 5 WPŁYW KONWEKCJI NA ROZKŁAD TEMPERATURY W POMIESZCZENIU Cel ćwiczenia. Celem ćwiczenia jest badanie rozkładu temperatur w pomieszczeniu oraz określenie wpływu czynników zaburzających. Zakres
ĆWICZENIE 5 WPŁYW KONWEKCJI NA ROZKŁAD TEMPERATURY W POMIESZCZENIU Cel ćwiczenia. Celem ćwiczenia jest badanie rozkładu temperatur w pomieszczeniu oraz określenie wpływu czynników zaburzających. Zakres
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego
 LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
LABORATORIUM 5: Sterowanie rzeczywistym serwomechanizmem z modułem przemieszczenia liniowego Uwagi (pominąć, jeśli nie ma problemów z wykonywaniem ćwiczenia) 1. Jeśli pojawiają się błędy przy próbie symulacji:
LabVIEW PLATFORMA EDUKACYJNA Lekcja 6 LabVIEW i Arduino programy wykorzystujące wyświetlacz LCD, czujnik temperatury, PWM i diodę LED
 LabVIEW PLATFORMA EDUKACYJNA Lekcja 6 LabVIEW i Arduino programy wykorzystujące wyświetlacz LCD, czujnik temperatury, PWM i diodę LED Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie
LabVIEW PLATFORMA EDUKACYJNA Lekcja 6 LabVIEW i Arduino programy wykorzystujące wyświetlacz LCD, czujnik temperatury, PWM i diodę LED Przygotował: Jakub Wawrzeńczak 1. Wprowadzenie Lekcja przedstawia wykorzystanie
Uczeń/Uczennica po zestawieniu połączeń zgłasza nauczycielowi gotowość do sprawdzenia układu i wszystkich połączeń.
 Nazwa implementacji: Układ pomiarowy Arduino - S4a - fotorezystor i diody LED Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania dodatkowych elementów zestawu modułu-interfejsu z układem
Nazwa implementacji: Układ pomiarowy Arduino - S4a - fotorezystor i diody LED Autor: Krzysztof Bytow Opis implementacji: Wizualizacja działania dodatkowych elementów zestawu modułu-interfejsu z układem
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy. Przebieg ćwiczenia
 Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Ćwiczenie VI LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Przebieg ćwiczenia 1. Rozpoznać elementy modelu układu
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania. Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne. Ćwiczenie 11 Silnik
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 11 Silnik Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS WYKONYWANIA ĆWICZEŃ
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 11 Silnik Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS WYKONYWANIA ĆWICZEŃ
Projekt współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
 El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
El ektroni ka cyfrow a Aut orpr ogr amuz aj ęć: mgri nż.mar ci njuki ewi cz Pr oj ektwspół f i nansowanyześr odkówuni ieur opej ski ejwr amacheur opej ski egofunduszuspoł ecznego Spis treści Zajęcia 1:
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S7-1200 - podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Ćwiczenie 10 Wizualizacja
 Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 10 Wizualizacja 24.04.2018 Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS
Politechnika Poznańska Wydział Budowy Maszyn i Zarządzania Automatyzacja i Nadzorowanie Maszyn Zajęcia laboratoryjne Ćwiczenie 10 Wizualizacja 24.04.2018 Poznań 2017 OGÓLNE ZASADY BEZPIECZEŃSTWA PODCZAS
MECHATRONIKA według. ch!
 MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
MECHATRONIKA według ch! Niniejsze opracowanie zostało przygotowane na potrzeby projektu: "Strategia Wolnych i Otwartych Implementacji jako innowacyjny model zainteresowania kierunkami informatyczno-technicznymi
SIP Studia Podyplomowe Ćwiczenie laboratoryjne Instrukcja
 SIP Studia Podyplomowe Ćwiczenie laboratoryjne Instrukcja Instytut Telekomunikacji Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska, marzec 2015 Wprowadzenie Ćwiczenie jest wykonywane
SIP Studia Podyplomowe Ćwiczenie laboratoryjne Instrukcja Instytut Telekomunikacji Wydział Elektroniki i Technik Informacyjnych Politechnika Warszawska, marzec 2015 Wprowadzenie Ćwiczenie jest wykonywane
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet.
 Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Poniższy przykład przedstawia prosty sposób konfiguracji komunikacji między jednostkami centralnymi LOGO! w wersji 8 w sieci Ethernet. Przygotowanie urządzeń W prezentowanym przykładzie adresy IP sterowników
Płytka uruchomieniowa XM64
 2015 Płytka uruchomieniowa XM64 - Instrukcja obsługi www.barion-st.com 2015-05-12 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM64?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
2015 Płytka uruchomieniowa XM64 - Instrukcja obsługi www.barion-st.com 2015-05-12 2 SPIS TREŚCI 1. WSTĘP... 3 1.1 Co to jest XM64?... 3 1.2 Budowa oraz parametry techniczne... 3 1.3 Schemat połączeń...
OPIS PROGRAMU OBSŁUGI STEROWNIKÓW INTECONT >> WAGMASTER << >> INTECONT <<
 OPIS PROGRAMU OBSŁUGI STEROWNIKÓW INTECONT >> WAGMASTER > INTECONT
OPIS PROGRAMU OBSŁUGI STEROWNIKÓW INTECONT >> WAGMASTER > INTECONT
Temat: Kopiowanie katalogów (folderów) i plików pomiędzy oknami
 i plików pomiędzy oknami") Temat: Kopiowanie katalogów (folderów) i plików pomiędzy oknami Jeśli chcemy skopiować dany plik lub katalog należy kliknąć na ikonę Mój komputer (2 razy), a następnie zaznaczony obiekt np. z dysku C:\
Temat: Kopiowanie katalogów (folderów) i plików pomiędzy oknami Jeśli chcemy skopiować dany plik lub katalog należy kliknąć na ikonę Mój komputer (2 razy), a następnie zaznaczony obiekt np. z dysku C:\
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania
 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania Podstawy Automatyki Regulacja temperatury z wykorzystaniem sterownika PLC Zadania do ćwiczeń laboratoryjnych
Programowanie obiektowe
 Laboratorium z przedmiotu Programowanie obiektowe - zestaw 07 Cel zajęć. Celem zajęć jest zapoznanie z praktycznymi aspektami tworzenia aplikacji okienkowych w C#. Wprowadzenie teoretyczne. Rozważana w
Laboratorium z przedmiotu Programowanie obiektowe - zestaw 07 Cel zajęć. Celem zajęć jest zapoznanie z praktycznymi aspektami tworzenia aplikacji okienkowych w C#. Wprowadzenie teoretyczne. Rozważana w
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja modyfikacji urządzeo DS511/DS512 w celu dostosowania do współpracy z aplikacją na Smartfon.
 Instrukcja modyfikacji urządzeo DS511/DS512 w celu dostosowania do współpracy z aplikacją na Smartfon. 1. Wstęp W celu umożliwienia współpracy DS511/DS512 z aplikacją na smartfon, niezbędna jest zmiana
Instrukcja modyfikacji urządzeo DS511/DS512 w celu dostosowania do współpracy z aplikacją na Smartfon. 1. Wstęp W celu umożliwienia współpracy DS511/DS512 z aplikacją na smartfon, niezbędna jest zmiana
Opis szybkiego uruchomienia programu APBSoft
 Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
Opis szybkiego uruchomienia programu APBSoft www.telmatik.pl Program APBSoft należy instalować z otrzymanej płyty CD albo pobrać ze strony www.telmatik.pl. W drugim przypadku program dostarczany jest w
Automatyka i Robotyka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów.
 Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
Kierunek Nazwisko dyplomanta Specyfikacja tematu Specjalne kwalifikacje osoby realizującej pracę dr inż. Dariusz Marchewka Opracowanie systemu gromadzącego i przetwarzającego wyniki zawodów robotów. Maksymilian
INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 3v1 IU SY3
 INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 3v1 Spis treści: 1. Wymagania systemowe...2 2. Parametry techniczne...2 3. Zestaw montażowy...2 4. Montaż czytnika...2 5. Instalacja oprogramowania...3
INSTRUKCJA UŻYTKOWANIA CZYTNIKA KART PROCESOROWYCH SYGNET 3v1 Spis treści: 1. Wymagania systemowe...2 2. Parametry techniczne...2 3. Zestaw montażowy...2 4. Montaż czytnika...2 5. Instalacja oprogramowania...3