Systemy Czasu Rzeczywistego (SCR)
|
|
|
- Alicja Stachowiak
- 7 lat temu
- Przeglądów:
Transkrypt

1 Systemy Czasu Rzeczywistego (SCR) Wykład 7: Sterowniki PLC SIEMENS S podstawowe informacje SKiTI2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok II, semestr IV dr inż. Tomasz Rutkowski 2017
2 Czym jest PLC? W normie IEC sterownik programowalny zdefiniowano jako: cyfrowy system elektroniczny do stosowania w środowisku przemysłowym, który posługuje się pamięcią programowalną do przechowywania zorientowanych na użytkownika instrukcji w celu sterowania przez cyfrowe lub analogowe wejścia i wyjścia szeroką gamą maszyn i procesów SCR
3 - podstawowe informacje - SCR 2017
 wyjścia typu przekaźnikowego (5 30 VDC lub 5 250 VAC) dwa wejścia analogowe (niesymetryczne) o")
, lub 0 20 ma (rozdzielczość 11 bitów) SCR 2017 4")
4 - typy sterowników sterownik zasilany napięciem zmiennym AC ( VAC), wejścia zasilane napięciem stałym DC (24 VDC) wyjścia typu przekaźnikowego (5 30 VDC lub VAC) dwa wejścia analogowe (niesymetryczne) o zakresie od 0 do 10 V (rozdzielczość 10 bitów); płytkę sygnałową wyposażona w jedno wyjście analogowe typu napięcie/prąd o zakresie +/- 10 V (rozdzielczość 12 bitów), lub 0 20 ma (rozdzielczość 11 bitów) SCR

5 - cykl pracy SCR
6 - tryby pracy CPU W trybie STOP CPU nie wykonuje programu i użytkownik może wczytać projekt. W trybie STARTUP wykonywany jest jednokrotnie startowy OB (jeśli istnieje). W fazie startowej trybu RUN nie są obsługiwane przerwania. W trybie RUN regularnie jest powtarzany cykl programu. Mogą się pojawiać przerwania i są przetwarzane w dowolnym miejscu cyklu programu. SCR


7 - typy danych SCR 2017 Podstawowe typy danych, więcej w dokumentacji 7


8 - obszary pamięci SCR
9 [1] Możliwestany:0 Inactive,1 Pretuning,2 Finetuning,3 Automatic,4-Manual Siemens S obszary pamięci - adresowanie Różne obszary pamięci mają swoje unikalne adresy Bezwzględny adres składa się z: identyfikatora obszaru pamięci (takich jak I obszar wejść, Q, - obszar wyjść, M obszar pamięci bitowej ogólnego przeznaczenia). rozmiaru danych dostępowych ( B dla bajtów, W dla słów (Word), D dla podwójnych słów (DW)) adresu danych. SCR 2017 Typ Adres Opis Bool %I0.0 Obraz wejścia dyskretnego, bajt 0, bit 0 Bool %Q0.0 Obraz wyjścia dyskretnego, bajt 0, bit 0 Real %MD1 Obszar pamięci bitowej, podwójne słowo, adres 1 Int %MW5 Obszar pamięci bitowej, słowo, adres 5 DWord %MD7 Obszar pamięci bitowej, podwójne słowo, adres 7 Word %IW64 Obraz wejścia analogowego, słowo, adres 64 Word %IW66 Obraz wejścia analogowego, słowo, adres 66 Word %QW80 Obraz wyjścia analogowego, słowo, adres 80 9
![[1] Możliwestany:0 Inactive,1 Pretuning,2 Finetuning,3 Automatic,4-Manual Siemens S7-1200 - obszary pamięci - adresowanie Lp.](/docs-images/66/55471486/images/10-0.jpg "Typ zmiennej Liczba bitów Ilość zajmowanych rejestrów 1 Real 32 4 2 DWord 32 4 3 Word 16 2 4 Int 16 2 5 Bool 1 Jeden bit rejestru SCR")
10 [1] Możliwestany:0 Inactive,1 Pretuning,2 Finetuning,3 Automatic,4-Manual Siemens S obszary pamięci - adresowanie Lp. Typ zmiennej Liczba bitów Ilość zajmowanych rejestrów 1 Real DWord Word Int Bool 1 Jeden bit rejestru SCR
11 Koncepcja struktury programu użytkownika Siemens S programowanie OB bloki ogólnego przeznaczenia, definiujące strukturę programu FC, FB funkcje i bloki funkcji zawierające kod programu odpowiadający za wykonanie określonego zadania, bloki funkcji FB wykorzystują skojarzone bloki danych (BD) DB - bloki danych ich zadaniem jest przechowywanie danych, które mogą być wykorzystywane przez wszystkie bloki programu SCR
 SCR")
12 - programowanie Koncepcja struktury programu użytkownika (obsługa zdarzenia przerwania) SCR
13 - programowanie w SCL Koncepcja struktury programu użytkownika (np. 3 poziomowe zagnieżdżanie) DB - bloki danych przechowujące dane, które mogą być używane przez wszystkie bloki programu SCR
14 - programowanie w SCL SCL (ang. Structured Control Language) to język tekstowy podobny do Pascala SCL jest implementacją języka ST (ang. Structured Text) z normy IEC SCR
15 - programowanie w SCL SCR

16 - programowanie w SCL SCR

17 SCR 2017 Siemens S programowanie w SCL
18 - TIA PORTAL TIA Portal to środowisko projektowe systemów automatyki przemysłowej. W ramach jednolitego środowiska instalowane są różne narzędzia projektowe wymagane przez użytkownika takie jak oprogramowanie dla sterowników, paneli obsługi operatorskiej, czy napędów. Ułatwia tworzenie złożonych aplikacji, poprzez zarządzanie wspólną bazą danych projektowych, oraz projektowanie rozbudowanych sieci komunikacyjnych. Wbudowane narzędzia edycyjne przyspieszają tworzenie aplikacji przez programistę. Wyposażony w dwa widoki: Portalu (Portal view) i Projektu (Project view) SCR


19 - TIA PORTAL identyfikacja sterownika w lokalnej sieci SCR


20 - TIA PORTAL identyfikacja sterownika w lokalnej sieci Adresy MAC jednoznacznie identyfikują sterownik, można zmodyfikować adres IP dowolnego sterownika na liście SCR


21 - TIA PORTAL identyfikacja sterownika w lokalnej sieci Adresy MAC jednoznacznie identyfikują sterownik, można zmodyfikować adres IP dowolnego sterownika na liście Jeśli jest taka potrzeba dokonuje się modyfikacji adresu IP sterownika SCR


22 - TIA PORTAL otwarcie projektu 1 2 SCR


23 - TIA PORTAL otwarcie projektu Gdy trzeba można zmienić adres IP sterownika w projekcie SCR


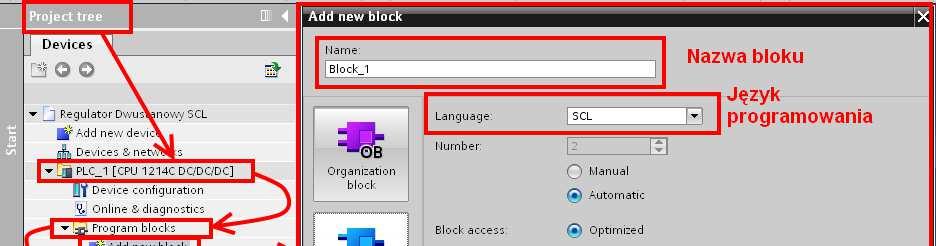
24 - programowanie w SCL TIA PORTAL Dodawanie bloków programu przez użytkownika SCR


25 - programowanie w SCL TIA PORTAL Typy bloków OB do organizacji programu użytkownika SCR

26 - programowanie w SCL TIA PORTAL SCR

27 - programowanie w SCL TIA PORTAL SCR


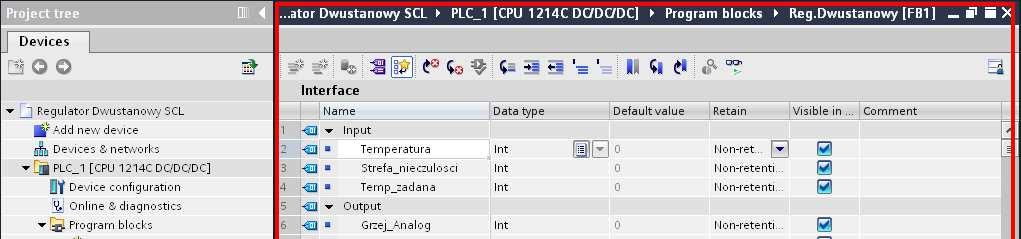
28 - programowanie w SCL TIA PORTAL Definicja wejść, wyjść i zmiennych utworzonego bloku funkcyjnego SCR


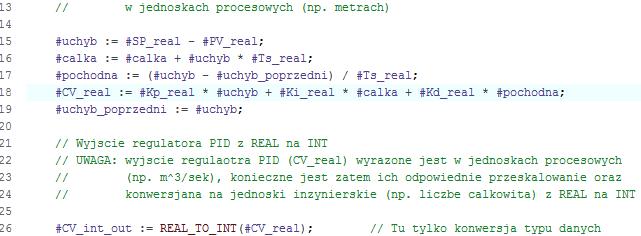
29 - programowanie w SCL TIA PORTAL Programowanie w SCL wykorzystanie szablonów wbudowanych funkcji SCR
30 - programowanie w SCL TIA PORTAL Program przykładowego regulatora dwustanowego ze strefą nieczułości SCR
 SCR 2017")
31 - programowanie w SCL TIA PORTAL Dodanie utworzonego bloku funkcyjnego do bloku Main (metoda przeciągnij i upuść, automatycznie powstaje w projekcie blok danych) SCR


32 - programowanie w SCL TIA PORTAL Zdefiniowanie i przypisanie zmiennych, wejść i wyjść do utworzonego bloku SCR

33 - programowanie w SCL TIA PORTAL Name Data type Adress Opis 1 Temp Int %IW64 Temperatura w pomieszczeniu 2 Grzej Bool %Q0.0 Dyskretny sygnał sterujący z regulatora 3 Grzej_Analog Int %QW80 Analogowy sygnał sterujący z regulatora SCR


34 - programowanie w SCL TIA PORTAL Blok programu z przypisanymi wejściami i wyjściami SCR


35 Kompilacja konfiguracji sprzętowej i paragramu użytkownika Siemens S TIA PORTAL lub SCR lub


36 Wgranie konfiguracji i programu użytkownika do sterownika i przejście w tryb RUN sterownika Siemens S TIA PORTAL SCR


37 Wgranie konfiguracji i programu użytkownika do sterownika i przejście w tryb RUN sterownika Siemens S TIA PORTAL SCR


38 Wgranie konfiguracji i programu użytkownika do sterownika i przejście w tryb RUN sterownika Siemens S TIA PORTAL SCR

39 Analogowe wejścia (AI) Siemens S specyfikacja analogowych wejść/wyjść SCR

40 Analogowe wejścia (AI) Siemens S specyfikacja analogowych wejść/wyjść SCR
")
41 - specyfikacja analogowych wejść/wyjść Napięciowa reprezentacja wejść analogowych (AI) SCR

")
42 - specyfikacja analogowych wejść/wyjść Napięciowa reprezentacja wejść analogowych (AI) SCR

43 Analogowe wyjścia (AQ) Siemens S specyfikacja analogowych wejść/wyjść SCR

")
44 - specyfikacja analogowych wejść/wyjść Napięciowa reprezentacja wyjść analogowych (AQ) SCR
45 - sterownik w laboratorium - HILS Podgląd wartości sygnału sterującego (woltomierz 2) wyrażonego w V (wyprowadzonego na pierwsze wyjście analogowe sterownika - adres %QW80) Podgląd wartości zadanej (woltomierz 1) z potencjometru, wyrażonej w V (doprowadzona na pierwsze wejście analogowe sterownika - adres %IW64) 1 2 Zadajnik wartości zadanej (potencjometr) SCR
46 - sterownik w laboratorium - HILS Analogowa (napięciowa) wartości zmiennej regulowanej (np. z Matlaba/Simulinka) doprowadzona na drugie wejście analogowe sterownika - adres %IW66) SCR
47 - sterownik w laboratorium - HILS Analogowa (napięciowa) wartości sygnału sterującego (podgląd na woltomierzu 2), wyprowadzona z pierwszego wyjścia analogowe sterownika - adres %QW80 (np. do Matlaba/Simulinka) SCR
48 - sterownik w laboratorium - HILS Pierwsze wyjście analogowe karty akwizycji danych PCI-1711 (Matlab/Simulink) - do połączenia za pomocą pary przewodów z wejściem analogowym sterownika (lewa strona obudowy) SCR
49 - sterownik w laboratorium - HILS Drugie wejście analogowe karty akwizycji danych PCI-1711 (Matlab/Simulink) - do połączenia za pomocą pary przewodów z wyjściem analogowym sterownika (prawa strona obudowy) SCR
50 - sterownik w laboratorium - HILS Wartość zadana z zadajnik wartości zadanej (potencjometr) x(t), 0V 10V Wejścia Analogowe (moduł CPU 1214C) Sterownik PLC S algorytm sterowania (np. dyskretny PID) Wyjście Analogowe (moduł SB 1232AQ) Sygnał analogowy: y m (t) 0V 10V Sygnał analogowy: u(t) 0V 10V Wyjścia Analogowe (karta PCI moduł PLCD-8710 ) Komputer PC + Matlab/Simulink Simulink Desktop Real-Time + Model obiektu Wejścia Analogowe (karta PCI moduł PLCD-8710 ) SCR
51 - sterownik w laboratorium - HILS Wartość zadana z zadajnik wartości zadanej (potencjometr w obudowie PLC) x(t) we a PLC S (CPU 1214C+SB 1232 AQ) + Regulator PID Obiekt e(t) we a wy p wy a u(t) we p y m (t) z(t) y(t) Matlab/Simulink z Simulink Desktop Real-Time (PC + PCI-1711) x(t) wielkość zadana; y(t) wielkość regulowana; y m (t) wielkość regulowana zmierzona; e(t) uchyb sterowania (uchyb regulacji): x(t)-y m (t); u(t) wielkość sterująca (wielkość wejściowa regulująca); z(t) wielkość zakłócająca (wielkość wejściowa zakłócająca); we a, wy a wejścia/wyjścia analogowe sterownika PLC S7-1200; we p, wy p wejścia/wyjścia analogowe karty PCI-1711 SCR
52 Bibliografia IEC Programmable Controllers - Programing Languages PN-IEC Sterowniki programowalne Postanowienia ogólne PN-EN Sterowniki programowalne Języki programowania SIEMENS S Easy book Kasprzyk J. Programowanie sterowników przemysłowych. WNT SCR
53 Dziękuję za uwagę!!! SCR
Realizacje regulatorów PID w sterownikach PLC Siemens S7-1200
 D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
D w sterownikach PLC Siemens S7-1200 Przemysłowe Układy Sterowania PID Opracowanie: dr inż. Tomasz Rutkowski Katedra Inżynierii Systemów Sterowania 2014/2015 Politechnika Gdańska Wydział Elektrotechniki
Sterowniki Programowalne sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne sem. V, AiR Laboratorium nr 5 - Regulator PID w sterowniku programowalnym Siemens S7-1200 z wykorzystaniem symulacji w pętli sprzętowej Hardware
Siemens S7-1200 Konfiguracja regulatora PID
 Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Siemens S7-1200 Konfiguracja regulatora PID 1 Wprowadzenie Środowisko STEP 7 umożliwia wykorzystanie instrukcji sterownika S7-1200 które pozwalają na prostą konfiguracje i zastosowanie regulatora PID.
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania KOMPUTEROWE SYSTEMY STEROWANIA (KSS) Temat: Budowa pętli sprzętowej (ang. Hardware In the Loop) w oparciu
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Sterowniki PLC szybkie wprowadzenie, oraz SIEMENS S7-1200 podstawowe informacje Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka
Systemy Czasu Rzeczywistego (SCR) Sterowniki PLC szybkie wprowadzenie, oraz SIEMENS S7-1200 podstawowe informacje Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Opracował: Jan Front
 Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Opracował: Jan Front Sterownik PLC PLC (Programowalny Sterownik Logiczny) (ang. Programmable Logic Controller) mikroprocesorowe urządzenie sterujące układami automatyki. PLC wykonuje w sposób cykliczny
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
PROJEKT WSPÓŁFINANSOWANY ZE ŚRODKÓW UNII EUROPEJSKIEJ W RAMACH EUROPEJSKIEGO FUNDUSZU SPOŁECZNEGO OPIS PRZEDMIOTU. Sieci i sterowniki przemysłowe
 OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
OPIS PRZEDMIOTU Nazwa przedmiotu Kod przedmiotu Sieci i sterowniki przemysłowe Wydział Instytut/Katedra Kierunek Specjalizacja/specjalność Wydział Matematyki, Fizyki i Techniki Instytut Mechaniki i Informatyki
Sterowniki Programowalne (SP) Wykład 11
 Wykład 11") Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Sterowniki Programowalne (SP) Wykład 11 Podstawy metody sekwencyjnych schematów funkcjonalnych (SFC) SP 2016 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka
Spis treści. Dzień 1. I Rozpoczęcie pracy ze sterownikiem (wersja 1707) II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400
 II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400") ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
Sterowniki PLC. Elektrotechnika II stopień Ogólno akademicki. przedmiot kierunkowy. Obieralny. Polski. semestr 1
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E2T-09-s2 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable Logic
Konfiguracja regulatora PID
 Konfiguracja regulatora PID Simatic Step 7 Basic v10.5 S7-1200 PLC FAQ Lipiec 2010 Spis treści 1 Opis obiektu regulacji PID 3 2 Wstęp do nowego projektu. 4 2.1 Nowy projekt... 4 2.2 Dodanie nowego urządzenia...
Konfiguracja regulatora PID Simatic Step 7 Basic v10.5 S7-1200 PLC FAQ Lipiec 2010 Spis treści 1 Opis obiektu regulacji PID 3 2 Wstęp do nowego projektu. 4 2.1 Nowy projekt... 4 2.2 Dodanie nowego urządzenia...
Kurs SIMATIC S7-300/400 i TIA Portal - Zaawansowany. Spis treści. Dzień 1
 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Sterowniki programowalne Programmable Controllers. Energetyka I stopień Ogólnoakademicki. przedmiot kierunkowy
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Sterowniki programowalne Programmable Controllers
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop Spis treści
 Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Szkoła programisty PLC : sterowniki przemysłowe / Gilewski Tomasz. Gliwice, cop. 2017 Spis treści O autorze 9 Wprowadzenie 11 Rozdział 1. Sterownik przemysłowy 15 Sterownik S7-1200 15 Budowa zewnętrzna
Elektrotechnika II Stopień (I stopień / II stopień) Ogólno akademicki (ogólno akademicki / praktyczny)
 Ogólno akademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny
 - Wykład #1 Wykład organizacyjny") Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Sterowniki Programowalne (SP) - Wykład #1 Wykład organizacyjny WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski, dr inż. Październik 2016 SP wykład organizacyjny
Siemens S7-1200. Szybki start. Podstawy pracy ze środowiskiem TIA Portal. Opracowano na postawie materiału S7-1200 Pierwsze kroki z sierpnia 2012
 Siemens S7-1200 Szybki start Podstawy pracy ze środowiskiem TIA Portal Opracowano na postawie materiału S7-1200 Pierwsze kroki z sierpnia 2012 Autorzy: mgr inż. Bartosz Puchalski dr inż. Tomasz Rutkowski
Siemens S7-1200 Szybki start Podstawy pracy ze środowiskiem TIA Portal Opracowano na postawie materiału S7-1200 Pierwsze kroki z sierpnia 2012 Autorzy: mgr inż. Bartosz Puchalski dr inż. Tomasz Rutkowski
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
Sterowniki Programowalne (SP) Wybrane aspekty procesu tworzenia oprogramowania dla sterownika PLC Podstawy języka funkcjonalnych schematów blokowych (FBD) Politechnika Gdańska Wydział Elektrotechniki i
JĘZYKI PROGRAMOWANIA STEROWNIKÓW
 JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
JĘZYKI PROGRAMOWANIA STEROWNIKÓW dr inż. Wiesław Madej Wstęp Języki programowania sterowników 15 h wykład 15 h dwiczenia Konsultacje: - pokój 325A - środa 11 14 - piątek 11-14 Literatura Tadeusz Legierski,
NX700 PLC www.atcontrol.pl
 NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX700 PLC NX700 Podstawowe cechy Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
Politechnika Gdańska. Gdańsk, 2016
 Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Politechnika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów Geoinformatycznych Aplikacje Systemów Wbudowanych Programowalne Sterowniki Logiczne (PLC) Krzysztof Bikonis Gdańsk,
Programowanie sterowników PLC wprowadzenie
 Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
Programowanie sterowników PLC wprowadzenie Zakład Teorii Maszyn i Automatyki Katedra Podstaw Techniki Felin p.110 http://ztmia.ar.lublin.pl/sips waldemar.samociuk@up.lublin,pl Sterowniki programowalne
E-E-A-1008-s6. Sterowniki PLC. Elektrotechnika I stopień Ogólno akademicki. kierunkowy (podstawowy / kierunkowy / inny HES)
") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-E-A-1008-s6 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Elektrotechnika I stopień Ogólno akademicki. kierunkowy (podstawowy / kierunkowy / inny HES)
") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2012/2013
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym
 Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
Siemens Simatic S7-300 Informacje podstawowe o sterowniku programowalnym Zakład Napędu Elektrycznego ISEP PW Wstęp Sterowniki swobodnie programowalne S7-300 należą do sterowników średniej wielkości. Są
Regulator PID w sterownikach programowalnych GE Fanuc
 Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Regulator PID w sterownikach programowalnych GE Fanuc Wykład w ramach przedmiotu: Sterowniki programowalne Opracował na podstawie dokumentacji GE Fanuc dr inż. Jarosław Tarnawski Cel wykładu Przypomnienie
Adresowanie obiektów. Adresowanie bitów. Adresowanie bajtów i słów. Adresowanie bajtów i słów. Adresowanie timerów i liczników. Adresowanie timerów
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Urządzenia automatyki przemysłowej Kod przedmiotu
 Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
Urządzenia automatyki przemysłowej - opis przedmiotu Informacje ogólne Nazwa przedmiotu Urządzenia automatyki przemysłowej Kod przedmiotu 06.0-WE-AiRP-UAP Wydział Kierunek Wydział Informatyki, Elektrotechniki
STEROWNIKI PROGRAMOWALNE PLC
 STEROWNIKI PROGRAMOWALNE PLC SPIS TREŚCI PROGRAMOWALNE UKŁADY AUTOMATYKI ZADANIA STEROWNIKÓW PLC CECHY STEROWNIKÓW PLC RODZAJE STEROWNIKÓW PLC OBSZARY ZASTOSOWAŃ STEROWNIKÓW PLC BUDOWA STEROWNIKÓW PLC
STEROWNIKI PROGRAMOWALNE PLC SPIS TREŚCI PROGRAMOWALNE UKŁADY AUTOMATYKI ZADANIA STEROWNIKÓW PLC CECHY STEROWNIKÓW PLC RODZAJE STEROWNIKÓW PLC OBSZARY ZASTOSOWAŃ STEROWNIKÓW PLC BUDOWA STEROWNIKÓW PLC
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Pierwsze kroki z easy Soft CoDeSys. 2009 Eaton Corporation. All rights reserved.
 Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Pierwsze kroki z easy Soft CoDeSys Tworzenie prostego programu Rozpoczęcie pracy 2 Tworzenie prostego programu Wybór aparatu 3 Tworzenie prostego programu Wybór języka programowania Do wyboru jest sześć
Spis treści. Dzień 1. I Konfiguracja sterownika (wersja 1312) II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)
 II Tryby pracy CPU (wersja 1312) III Bloki funkcyjne (wersja 1312)") Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1312) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór CPU z katalogu I-6 Dodawanie modułów
Sterowniki Programowalne (SP) Wykład 13
 Wykład 13") Sterowniki Programowalne (SP) Wykład 13 Język C dla sterowników programowalnych GeFanuc Na podstawie C Programmer's Toolkit for PACSystems WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW
Sterowniki Programowalne (SP) Wykład 13 Język C dla sterowników programowalnych GeFanuc Na podstawie C Programmer's Toolkit for PACSystems WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW
Język FBD w systemie Concept
 Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Adresowanie obiektów Bit - stan pojedynczego sygnału - wejście lub wyjście dyskretne, bit pamięci Bajt - 8 bitów - wartość od -128 do +127 Słowo - 16 bitów - wartość od -32768 do 32767 -wejście lub wyjście
Ćwiczenia z S7-1200. S7-1200 jako Profinet-IO Controller. FAQ Marzec 2012
 Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Politechnika Białostocka
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych: 5-7 Narzędzia inżynierskie: TIA Portal dla sterowników SIMATIC serii S7 Laboratorium z
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych: 5-7 Narzędzia inżynierskie: TIA Portal dla sterowników SIMATIC serii S7 Laboratorium z
E-4EZA1-10-s7. Sterowniki PLC
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu E-4EZA1-10-s7 Nazwa modułu Sterowniki PLC Nazwa modułu w języku angielskim Programmable
Systemy Czasu Rzeczywistego (SCR)
") Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Systemy Czasu Rzeczywistego (SCR) Wykład 1: Organizacja i program przedmiotu SKiTI 2017 WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Kierunek: Automatyka i Robotyka Studia
Elastyczne systemy wytwarzania
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium: Elastyczne systemy wytwarzania Załącznik do instrukcji nr 1 Opracował: Jakub Zawrotniak Poniżej przedstawiono sposób tworzenia nowego projektu/programu: a)
Ćwiczenia z S7-1200. Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP.
 Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
Ćwiczenia z S7-1200 Komunikacja S7-1200 z miernikiem parametrów sieci PAC 3200 za pośrednictwem protokołu Modbus/TCP FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz
1.1. Wymogi bezpieczeństwa Pomoc techniczna TIA Portal V13 instalacja i konfiguracja pakietu...18
 3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
Systemy wbudowane. Paweł Pełczyński ppelczynski@swspiz.pl
 Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Systemy wbudowane Paweł Pełczyński ppelczynski@swspiz.pl 1 Program przedmiotu Wprowadzenie definicja, zastosowania, projektowanie systemów wbudowanych Mikrokontrolery AVR Programowanie mikrokontrolerów
Podstawy programowania sterowników SIMATIC S w języku LAD / Tomasz Gilewski. Legionowo, cop Spis treści
 Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Katedra Systemów Cyfrowego Przetwarzania Sygnałów
 Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Katedra Systemów Cyfrowego Przetwarzania Sygnałów Proponowana specjalnośd I stopnia (inżynierska) dr inż. Wiesław Madej Pok 325A Informatyka Specjalnośd: Programowanie Systemów Automatyki Programowanie
Sterowniki Programowalne (SP)
") Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz
Sterowniki Programowalne (SP) O normie IEC 61131 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Studia stacjonarne I stopnia: rok III, semestr V dr inż. Tomasz
Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania
 1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
1 Opracowanie systemu sterowania wybranej linii technologicznej z uwzględnieniem zagadnień inżynierii oprogramowania Martyna MICHALEC Kierujący projektem: dr hab. inż. Marek FIDALI, prof. Pol. Śl. Opiekun:
ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC
 Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Mgr inż. Szymon BORYS Wojskowa Akademia Techniczna DOI: 10.17814/mechanik.2015.7.213 ŚRODOWISKO PC WORX JAKO WSPARCIE W NAUCE PROGRAMOWANIA STEROWNIKÓW PLC Streszczenie: W artykule przedstawiono możliwość
Kurs Projektowanie i programowanie z Distributed Safety. Spis treści. Dzień 1. I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212)
") Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Sterowniki Programowalne Sem. V, AiR
 Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
Katedra Inżynierii Systemów Sterowania Sterowniki Programowalne Sem. V, AiR Opis stanowiska sterowania prędkością silnika 3-fazowego Opracował: mgr inż. Arkadiusz Cimiński Data: październik, 2016 r. Opis
1. Podstawowe wiadomości...9. 2. Możliwości sprzętowe... 17. 3. Połączenia elektryczne... 25. 4. Elementy funkcjonalne programów...
 Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
Spis treści 3 1. Podstawowe wiadomości...9 1.1. Sterowniki podstawowe wiadomości...10 1.2. Do czego służy LOGO!?...12 1.3. Czym wyróżnia się LOGO!?...12 1.4. Pierwszy program w 5 minut...13 Oświetlenie
NX70 PLC www.atcontrol.pl
 NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
NX70 PLC NX70 Właściwości Rozszerzalność, niezawodność i łatwość w integracji Szybki procesor - zastosowanie technologii ASIC pozwala wykonywać CPU proste instrukcje z prędkością 0,2 us/1 krok Modyfikacja
STEROWANIE MASZYN I URZĄDZEŃ I. Laboratorium. 8. Układy ciągłe. Regulator PID
 STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
STEROWANIE MASZYN I URZĄDZEŃ I Laboratorium 8. Układy ciągłe. Regulator PID Opracował: dr hab. inż. Cezary Orlikowski Instytut Politechniczny 1 Blok funkcyjny regulatora PID przedstawiono na rys.1. Opis
Materiały dodatkowe. Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS. Opracowali: mgr inż.
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Konfiguracja sterownika programowalnego Siemens do obsługi protokołu MODBUS Opracowali: mgr inż. Tomasz Karla Data: Luty, 2017 r. Dodatkowe informacje
Millenium II+ Moduły programowalne. jeszcze więcej możliwości NOWOŚĆ! FUNKCJA
 NOWOŚĆ! Moduły programowalne Millenium II+ jeszcze więcej możliwości FUNKCJA Łatwość i intuicyjność programowania, szeroka oferta oraz olbrzymie możliwości w postaci wejścia analogowego 0-10V, potencjometrycznego,
NOWOŚĆ! Moduły programowalne Millenium II+ jeszcze więcej możliwości FUNKCJA Łatwość i intuicyjność programowania, szeroka oferta oraz olbrzymie możliwości w postaci wejścia analogowego 0-10V, potencjometrycznego,
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych
 ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
ZP/UR/46/203 Zał. nr a do siwz Szczegółowy Opis Przedmiotu Zamówienia: Zestaw do badania cyfrowych układów logicznych Przedmiot zamówienia obejmuje następujące elementy: L.p. Nazwa Ilość. Zestawienie komputera
ECTS - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 2015/2016
 - program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
- program studiów kierunku Automatyka i robotyka, Studia I stopnia, rok akademicki 20/206 Automatyka i robotyka Profil ogólnoakademicki studia stacjonarne I stopnia w c l p w c l p w c l p w c l p w c
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska
 Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska") Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
Sterowniki Programowalne (SP) Automatyka i Robotyka Wydział Elektrotechniki i Automatyki Politechnika Gdańska Wykład organizacyjny 30.09. 2014 Semestr V, AiR rok akademicki 2014/2015 Informacje formalne
CoDeSys 3 programowanie w języku drabinkowym LD
 Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
Notatka Aplikacyjna NA 03004PL Spis treści 1. Wstęp... 2 1.1. Wymagania programowe... 2 2. Tworzenie projektu i dodawanie programu w LD... 3 3. Organizacja okien dla języka LD... 5 4. Składnia języka LD
ZAAWANSOWANY TIA. Spis treści
 Spis treści I Przygotowanie sterownika do pracy (wersja 1909) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Przywracanie ustawień fabrycznych I-5 Tworzenie nowego projektu I-6 Tworzenie stacji poprzez
Spis treści I Przygotowanie sterownika do pracy (wersja 1909) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Przywracanie ustawień fabrycznych I-5 Tworzenie nowego projektu I-6 Tworzenie stacji poprzez
Politechnika Białostocka
 Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Politechnika Białostocka W ydział Elektryczny Katedra Automatyki i Elektroniki Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Układ regulacji PID: konfiguracja, strojenie i testowanie regulatora
Sterowniki Programowalne (SP) Wykład #4
 Wykład #4") Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
Sterowniki Programowalne (SP) Wykład #4 System GE Fanuc serii 90-30 Zasady działania systemu (część II) WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA INŻYNIERII SYSTEMÓW STEROWANIA Jarosław Tarnawski Październik
sterownik VCR v 1. 0
 sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
sterownik VCR v 1.0 1 I. DANE TECHNICZNE...2 1 Budowa...2 2 Dane znamionowe...2 II. INSTRUKCJA UŻYTKOWANIA...3 1 Programowanie sterownika...3 2 Symulacja algorytmu...3 3 Możliwości kalendarza...4 3.1 Wgrywanie
PROGRAMOWALNE STEROWNIKI LOGICZNE
 PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
PROGRAMOWALNE STEROWNIKI LOGICZNE I. Wprowadzenie Klasyczna synteza kombinacyjnych i sekwencyjnych układów sterowania stosowana do automatyzacji dyskretnych procesów produkcyjnych polega na zaprojektowaniu
SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)
 Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1)") 20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
20170513-1300 SiMod-X-(A1) Przetwornik parametrów powietrza z interfejsem RS485 (MODBUS RTU) oraz wyjściem analogowym (dotyczy wersji -A1) Skrócona instrukcja obsługi Od wersji oprogramowania 0.56 www.apautomatyka.pl
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki
 Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
Politechnika Białostocka Wydział Elektryczny Katedra Automatyki i Elektroniki ĆWICZENIE Nr 10 (3h) Implementacja interfejsu SPI w strukturze programowalnej Instrukcja pomocnicza do laboratorium z przedmiotu
SiR_4 Standaryzacja metod programowania sterowników PLC norma PN-IEC Typy danych i deklaracje zmiennych.
 SiR_4 Standaryzacja metod programowania sterowników PLC norma PN-IEC 61131. Typy danych i deklaracje zmiennych. Norma IEC 61131 (1993r.) składa się z pięciu części: 1. Informacje ogólne definicje pojęć,
SiR_4 Standaryzacja metod programowania sterowników PLC norma PN-IEC 61131. Typy danych i deklaracje zmiennych. Norma IEC 61131 (1993r.) składa się z pięciu części: 1. Informacje ogólne definicje pojęć,
Sterowniki programowalne
 Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
Wykład w ramach przedmiotu Sterowniki programowalne Sterowniki programowalne GE Fanuc serii 90-30 Zasady działania systemu (część II) Na podstawie dokumentacji GE Fanuc przygotował dr inż. Jarosław Tarnawski
3/13/2012. Automatyka i Sterowanie PRz Wprowadzenie. Wprowadzenie. Historia automatyki. dr inż. Tomasz Żabiński. Odśrodkowy regulator prędkości
 Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Automatyka i Sterowanie PRz 2012 Wprowadzenie dr inż. Tomasz Żabiński Lokalizacja: D102C Kontakt: tomz@przrzeszow.pl Sterowanie to celowe oddziaływanie (wpływanie) na przebieg procesów. [Kaczorek 2005]
Sterowniki programowalne w systemach sterowania urządzeń płynowych Programmable logic controller in control fluid systems
 Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2013/2014
Programowalny sterownik logiczny PLC
 AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
AiS Programowalne układy przemysłowe automatyki Cz.2 (wybrane slajdy) 1 Programowalny sterownik logiczny PLC WEJŚCIA styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony
Sterowniki Programowalne (SP) Siemens S-1200 - Pierwsze Kroki
 Siemens S-1200 - Pierwsze Kroki") Sterowniki Programowalne (SP) Siemens S-1200 - Pierwsze Kroki Opracowano na postawie materiału S7-1200 Pierwsze kroki z sierpnia 2012 1 Podstawowe informacje o sterowniku PLC firmy Siemens z serii S7 1200
Sterowniki Programowalne (SP) Siemens S-1200 - Pierwsze Kroki Opracowano na postawie materiału S7-1200 Pierwsze kroki z sierpnia 2012 1 Podstawowe informacje o sterowniku PLC firmy Siemens z serii S7 1200
Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi. Przebieg ćwiczenia
 Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Ćwiczenie VIIN Konfiguracja i programowanie PLC Siemens SIMATIC S7 i panelu tekstowego w układzie sterowania napędami elektrycznymi Przebieg ćwiczenia 1. Rozpoznać elementy stanowiska (rys.1,2,3) i podłączyć
Kurs STEP7 TIA - Zaawansowany. Spis treści. Dzień 1. I Konfiguracja sprzętowa sterownika SIMATIC S7-1200/1500 (wersja 1501)
") Spis treści Dzień 1 I Konfiguracja sprzętowa sterownika SIMATIC S7-1200/1500 (wersja 1501) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór
Spis treści Dzień 1 I Konfiguracja sprzętowa sterownika SIMATIC S7-1200/1500 (wersja 1501) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Tworzenie nowego projektu I-5 Tworzenie stacji poprzez wybór
Klasyczna architektura sterownika PLC
 Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
Programowalne sterowniki logiczne PLC - są to komputery przemysłowe, które umożliwiają sterowanie pracą maszyn i urządzeń w układzie otwartym i/lub zamkniętym. Praca PLC polega na monitorowaniu stanu wejść,
SYSTEMY CZASU RZECZYWISTEGO (SCR)
") Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
Politechnika Gdańska Wydział Elektrotechniki i Automatyki Katedra Inżynierii Systemów Sterowania SYSTEMY CZASU RZECZYWISTEGO (SCR) Temat: Implementacja i weryfikacja algorytmu sterowania z regulatorem
LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA
 AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
AKADEMIA GÓRNICZO- HUTNICZA IM. STANISŁAWA STASZICA W KRAKOWIE LABORATORIUM PRZEMYSŁOWYCH SYSTEMÓW STEROWANIA Wydział Inżynierii Mechanicznej i Robotyki Katedra Automatyzacji Procesów Przedmiot: Przemysłowe
Spis treści. Dzień 1. I Konfiguracja sterownika (wersja 1410) II Edycja programu (wersja 1406) III Środowisko TIA Portal (wersja 1410)
 II Edycja programu (wersja 1406) III Środowisko TIA Portal (wersja 1410)") Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1410) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Co jest potrzebne by zacząć? I-5 TIA Portal ekran startowy I-6 Tworzenie nowego projektu I-7
Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1410) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Co jest potrzebne by zacząć? I-5 TIA Portal ekran startowy I-6 Tworzenie nowego projektu I-7
STEROWNIKI i REGULATORY (TS1A522 380)
") STEROWNIKI i REGULATORY (TS1A522 380) Kierunek: Elektronika i Telekomunikacja (EP), sem. V Szczegółowy program wykładu 15 godz. 1. Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu
STEROWNIKI i REGULATORY (TS1A522 380) Kierunek: Elektronika i Telekomunikacja (EP), sem. V Szczegółowy program wykładu 15 godz. 1. Systemy sterowania w przemyśle. Podstawowe składniki sprzętowe systemu
Systemy Wbudowane. Założenia i cele przedmiotu: Określenie przedmiotów wprowadzających wraz z wymaganiami wstępnymi: Opis form zajęć
 Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Systemy Wbudowane Kod przedmiotu: SW Rodzaj przedmiotu: kierunkowy ; obowiązkowy Wydział: Informatyki Kierunek: Informatyka Specjalność (specjalizacja): - Poziom studiów: pierwszego stopnia Profil studiów:
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano
 Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
Działanie i charakterystyka sterownika GE FANUC VersaMaxNano Sterownik wykonuje cyklicznie program sterujący. Oprócz wykonywania programu sterującego, sterownik regularnie gromadzi dane z urządzeń wejściowych,
1.6 INFORMACJE OGÓLNE O STEROWNIKACH XL6 i XL6e
 256 K pamięci programu 1M pamięci przeznaczonej na grafikę Graficzny, kolorowy ekran dotykowy w technologii TFT Rozdzielczość 320 x 240 pikseli Obsługa 32000 kolorów 5 w pełni programowalnych klawiszy
256 K pamięci programu 1M pamięci przeznaczonej na grafikę Graficzny, kolorowy ekran dotykowy w technologii TFT Rozdzielczość 320 x 240 pikseli Obsługa 32000 kolorów 5 w pełni programowalnych klawiszy
Rok akademicki: 2013/2014 Kod: EEL s Punkty ECTS: 2. Poziom studiów: Studia I stopnia Forma i tryb studiów: Stacjonarne
 Nazwa modułu: Technika mikroprocesorowa Rok akademicki: 2013/2014 Kod: EEL-1-616-s Punkty ECTS: 2 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
Nazwa modułu: Technika mikroprocesorowa Rok akademicki: 2013/2014 Kod: EEL-1-616-s Punkty ECTS: 2 Wydział: Elektrotechniki, Automatyki, Informatyki i Inżynierii Biomedycznej Kierunek: Elektrotechnika Specjalność:
Spis treści. Dzień 1. I Sterowniki programowalne SIMATIC (wersja 1805) II Łączenie sterownika z programatorem (wersja 1805)
 II Łączenie sterownika z programatorem (wersja 1805)") Spis treści Dzień 1 I Sterowniki programowalne SIMATIC (wersja 1805) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
Spis treści Dzień 1 I Sterowniki programowalne SIMATIC (wersja 1805) I-3 Sterowniki programowalne - koncepcja I-4 Sterowniki modułowe i kompaktowe - porównanie I-5 Rodzina sterowników SIEMENS SIMATIC S7-1200/1500
O autorze... 9 Wprowadzenie... 11
 Spis tre ci O autorze... 9 Wprowadzenie... 11 Rozdzia 1. Sterownik przemys owy... 15 Sterownik S7-1200... 15 Budowa zewn trzna... 16 Budowa wewn trzna... 19 Cykl programu oraz tryby pracy... 21 Zestaw
Spis tre ci O autorze... 9 Wprowadzenie... 11 Rozdzia 1. Sterownik przemys owy... 15 Sterownik S7-1200... 15 Budowa zewn trzna... 16 Budowa wewn trzna... 19 Cykl programu oraz tryby pracy... 21 Zestaw
Wyjścia analogowe w sterownikach, regulatorach
 Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Wyjścia analogowe w sterownikach, regulatorach 1 Sygnały wejściowe/wyjściowe w sterowniku PLC Izolacja galwaniczna obwodów sterownika Zasilanie sterownika Elementy sygnalizacyjne Wejścia logiczne (dwustanowe)
Mechatronika i inteligentne systemy produkcyjne. Modelowanie systemów mechatronicznych Platformy przetwarzania danych
 Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Mechatronika i inteligentne systemy produkcyjne Modelowanie systemów mechatronicznych Platformy przetwarzania danych 1 Sterowanie procesem oparte na jego modelu u 1 (t) System rzeczywisty x(t) y(t) Tworzenie
Szybkie prototypowanie w projektowaniu mechatronicznym
 Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Szybkie prototypowanie w projektowaniu mechatronicznym Systemy wbudowane (Embedded Systems) Systemy wbudowane (ang. Embedded Systems) są to dedykowane architektury komputerowe, które są integralną częścią
Podstawy Automatyki. Wykład 6 - Miejsce i rola regulatora w układzie regulacji. dr inż. Jakub Możaryn. Warszawa, Instytut Automatyki i Robotyki
 Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
Wykład 6 - Miejsce i rola regulatora w układzie regulacji Instytut Automatyki i Robotyki Warszawa, 2015 Regulacja zadajnik regulator sygnał sterujący (sterowanie) zespół wykonawczy przetwornik pomiarowy
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRONIKI I NAPĘDÓW ELEKTRYCZNYCH
 POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRONIKI I NAPĘDÓW ELEKTRYCZNYCH Laboratorium Przemysłowych Systemów Cyfrowych Kierunek studiów: EZ Przedmiot: Przemysłowe systemy cyfrowe
POLITECHNIKA BIAŁOSTOCKA WYDZIAŁ ELEKTRYCZNY KATEDRA ENERGOELEKTRONIKI I NAPĘDÓW ELEKTRYCZNYCH Laboratorium Przemysłowych Systemów Cyfrowych Kierunek studiów: EZ Przedmiot: Przemysłowe systemy cyfrowe
MiAcz2. Programowalne systemy przemysłowe automatyki PLC
 MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
MiAcz2 Programowalne systemy przemysłowe automatyki PLC Programowalny sterownik logiczny WEJŚCIA PLC styki mechaniczne, przełączniki zbliżeniowe STEROWNIK Program sterujący wprowadzony do pamięci WYJŚCIA
Kurs SINAMICS G120 Konfiguracja i uruchomienie. Spis treści. Dzień 1
 Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Materiały dodatkowe. Simulink PLC Coder
 Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Katedra Inżynierii Systemów Sterowania Materiały dodatkowe Simulink PLC Coder Opracowali: mgr inż. Tomasz Karla Data: Listopad, 2016 r. Dodatkowe informacje Materiały dodatkowe mają charakter ogólny i
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0)
") Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6
Sterownik PLC ELP11R32-BASIC Dokumentacja techniczna (ver. 1.0) Spis treści 1.Informację ogólne...2 2.Podstawowe parametry...2 3.Wejścia / wyjścia...2 4.Schemat blokowy...5 5.Zegar czasu rzeczywistego...6