Satelitarne Systemy Nawigacyjne
|
|
|
- Antonina Krawczyk
- 8 lat temu
- Przeglądów:
Transkrypt
1 Satelitarne Systemy Nawigacyjne Wprowadzenie 1. Historia 2. System satelitarny GPS Navstar a) segment satelitarny b) segment kontroli c) segment uŝytkownika 3. Błędy GPS 4. Technologia pomiarów DGPS 5. Pomiary względne 6. Metody pomiarów GPS uŝywane w geodezji 7. System satelitarny Glonass 8. System satelitarny Galileo 9. Przewidywany rozwój technologii satelitarnego wyznaczania pozycji

2 Wykład opracowano na podstawie: Literatura 1. J. Narkiewicz; Globalny system pozycyjny, WKiŁ, J. Przywara; Europejski system nawigacji satelitarnej, Geodeta, Nr 12 (91), GRUDZIEŃ J. Tomczak - Janowski; GPS, 4. P. H. Dana; Global Positioning System Overview, 5. P. Frączyk, M. Figurski, G. Modliński, Z. Rzepecka, A. Tyranowska; Podstawy Technologii Satelitarnych Systemów Lokalizacyjnych GPS, GLONASS. 6. Praca zbiorowa; System nawigacyjny Galileo, WKŁ,

3 Wprowadzenie Satelitarne systemy nawigacyjne powstały, aby moŝna było w szybki i precyzyjny sposób wyznaczyć pozycję odbiornika danego systemu na powierzchni Ziemi. Wśród systemów wyróŝnić moŝna: GPS Navstar Glonass Galileo 3

4 Typowe zastosowania systemów satelitarnych 4

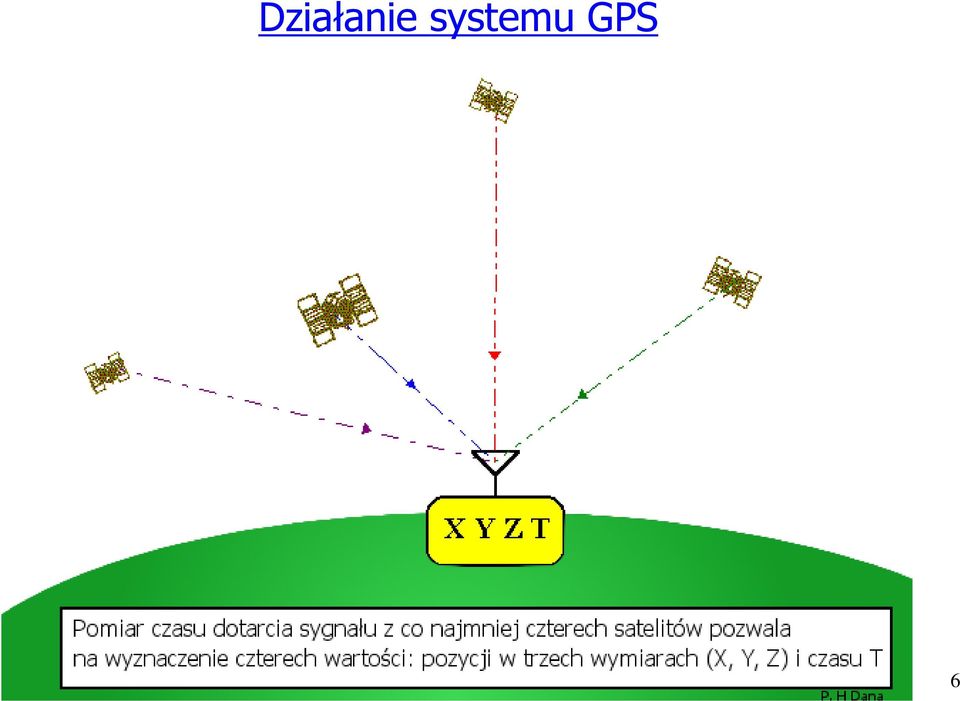
5 Działanie systemu GPS Zasada działania systemu opiera się na pomiarze odległości pomiędzy satelitą poruszającym się po ściśle wyznaczonej orbicie a odbiornikiem: Znana odległość od satelity lokuje odbiornik na sferze o promieniu równym zmierzonej odległości. Znana odległość od dwóch satelitów lokuje odbiornik na okręgu będącym przecięciem dwu sfer. Kiedy odbiornik zmierzy odległości od trzech satelitów, istnieją tylko dwa punkty, w których moŝe się on znajdować. Jeden z tych punktów moŝna wykluczyć jako znajdujący się zbyt wysoko lub poruszający się zbyt szybko. W ten sposób wyznaczamy swoją pozycję. Wyznaczenie odległości od co najmniej 4 satelitów pozwala na określenie pozycji w trzech wymiarach (X, Y, Z). 5


6 Działanie systemu GPS 6
7 Historia (1/3) 1957 Rosyjski Sputnik 1. Nasłuch jego transmisji radiowych wykazał wyraźną wędrówkę częstotliwości sygnałów satelity powstaje system Transit (właściwie Navy Navigation Satellite System - NNSS). W roku 1967 został udostępniony uŝytkownikom cywilnym. Satelity emitowały sygnały na częstotliwościach 150 MHz i 400 MHz. Dokładność systemu była stopniowo polepszana od 900 m w roku 1962, 185 m w 1969, do 36 metrów w roku r. system satelitarny MOSAIC (Mobile System for Accurate ICBM Control), przeznaczony do określania precyzyjnych koordynat ruchomych wyrzutni rakiet Minuteman. System nie został uruchomiony. 7

8 Historia (2/3) 1964 r. został uruchomiony system SECOR (Sequential Collation of Range), przeznaczony dla wojsk lądowych r. ZSRR uruchomił pierwszego satelitę swojego systemu nawigacyjnego Cyklon (Kosmos-192). Z systemu Cyklon wywodzi się rosyjski ratowniczy system lokalizacyjny KOSPAS. W maju tego roku marynarka USA umieściła na orbicie pierwszego satelitę serii TIMATION r. projekt DNSS (Defense Navigation Satellite System). Trzeci satelita DNSS był demonstratorem systemu GPS (Global Positioning System) Navstar. 8

9 Historia (3/3) Styczeń 1978 r. Pierwszy satelita systemu został umieszczony na orbicie Lipiec 1995 r. system uzyskał pełną sprawność operacyjną. Obecnie system jest zarządzany przez dowództwo sił powietrznych USA, a konkretnie połączone biuro Navstar (GPS JPO - Navstar GPS Joint Program Office). Rosyjskim odpowiednikiem GPS Navstar jest system GLONASS. Pod koniec roku 1999 w ramach Unii Europejskiej podpisano porozumienie o budowie nowego satelitarnego systemu nawigacyjnego GALILEO. Pierwszy satelita z tego systemu został umieszczony na orbicie przez rosyjską rakietę w grudniu 2005 roku. 9

10 2. GPS - NAVSTAR Satelitarny system nawigacyjny znany pod nazwą GPS (Global Positioning System) satelitarny system nawigacyjny Navstar (Navigational Satellite Time and Ranging) został zaprojektowany jako precyzyjny system określania połoŝenia o zasięgu globalnym. Obecnie system jest zarządzany przez dowództwo sił powietrznych USA, a konkretnie połączone biuro Navstar (GPS JPO - Navstar GPS Joint Program Office), złoŝone z przedstawicieli sił powietrznych, marynarki, sił lądowych, piechoty morskiej, straŝy przybrzeŝnej, US Defence Mapping Agency, kwatery głównej NATO i Australii. 10
, złoŝone z przedstawicieli sił powietrznych, marynarki, sił lądowych, piechoty morskiej, straŝy przybrzeŝnej, US Defence Mapping Agency,")
11 2. System satelitarny GPS Navstar Na system GPS Navstar składają się trzy segmenty: a/ segment satelitarny b/ segment kontroli c/ segment uŝytkownika 11

12 2 a/ Segment satelitarny GPS Segment satelitarny składa się z 27 satelitów (z czego 3 rezerwowe) krąŝących ponad 20200km ponad ziemią. Rozmieszczone są na sześciu orbitach (cztery satelity na kaŝdej), co pozwala na odbiór sygnału od pięciu do dwunastu satelitów z kaŝdego punktu globu. Płaszczyzny orbit nachylone są pod kątem 55 stopni do równika. Czas obiegu orbity wynosi około 12 godzin. Satelity rozmieszczone są tak, Ŝe prawdopodobieństwo dostępności co najmniej 5 z nich w dowolnym punkcie Ziemi wynosi

13 2 a/ Segment satelitarny GPS Satelita Navstar (SV - Space Vehicle) działa w oparciu o 9 systemów podstawowych: System wprowadzania na orbit System kontroli wysokości i prędkości System śledzenia i kontroli System nawigacyjny System wykrywania wybuchów jądrowych NUDET (Nuclear Detonation Detection System) System kontroli termicznej Blok Zasilania 13
 System kontroli termicznej Blok")
14 2 a/ Segment satelitarny GPS 14

15 2 b/ Segment kontroli GPS Segment kontroli tworzy system czterech stacji monitorujących i główne centrum kontroli (MCS - Master Control Station) w Colorado Springs - baza lotnicza Schriever. Stacje odbierają sygnały kontrolne i telemetryczne satelitów - w razie potrzeby dokonują zdalnej korekty. 15

16 2 b/ Segment kontroli GPS Stacje monitorujące śledzą trajektorię satelitów. W razie wystąpienia odchyleń od modelu orbitalnego ruchu, zostają wyliczone precyzyjne dane korekcyjne (efemerydy) i korekty zegara. Poprawki takie są wyliczane dla kaŝdego z satelitów. Dane te są wysyłane z głównego centrum poprzez stacje nadawcze do poszczególnych satelitów. Poprawki te są następnie przesyłane wraz z sygnałem satelity do uŝytkowników systemu w postaci depeszy nawigacyjnej. Raz do roku kaŝdy z satelitów zostaje poddany procesowi repozycjonowania, trwa to około 12 godzin. W tym czasie satelita jest nieaktywny. Stacja monitorująca moŝe śledzić jednocześnie do 11 satelitów. 16

17 2 b/ Segment kontroli GPS Stacja monitorująca Hawaje 17

18 2 c/ segment uŝytkownika GPS W GPS segment uŝytkownika tworzą odbiorniki. Istnieje wiele typów odbiorników GPS: ręczne wielkości telefonu komórkowego profesjonalne zestawy do nawigacji i geodezji wysokiej klasy moduły GPS, sprzęŝone z systemami nawigacyjnymi samolotów komunikacyjnymi i wojskowymi odbiorniki do urządzeń przenośnych 18

19 Poziomy dokładności System GPS oferuje dwa poziomy dokładności określania pozycji: PPS (Precise Position System) Precyzyjny System Nawigacji, dostępny jedynie dla Armii USA, Agencji Rządowych i autoryzowanych uŝytkowników SPS (Standard Position System) Standardowy System Nawigacji, powszechnie dostępny bez Ŝadnych opłat. 19
 Standardowy System Nawigacji, powszechnie dostępny bez")

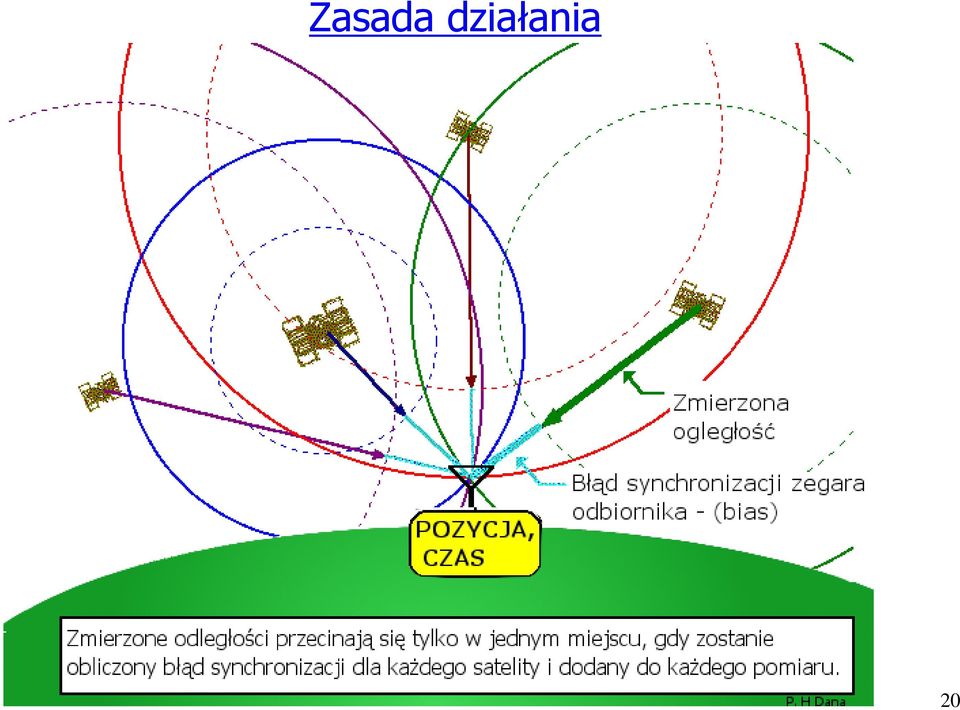
20 Zasada działania 20
21 Sygnały GPS Satelity GPS (space vehicles (SVs)) emitują dwa sygnały podnośne mikrofalowe: 1/ L1 ( MHz) niosący informacje nawigacyjną i sygnały kodowane dla uŝytkowników SPS, 2/ L2 ( MHz) jest uŝywany do pomiarów opóźnienia jonosferyczne uwzględnianego przez odbiorniki segmentu SPS. Trzy kody binarne są nakładane na te dwie podnośne: a/ kod C/A (Coarse/Clear Acquisition) moduluje fazę L1. b/ kod P/Y (Precise) moduluje zarówno podnośną L1 jak i L2. c/ depesza nawigacyjna moduluje L1. 21
22 Ad a/ kod C/A (Coarse/Clear Acquisition) moduluje fazę L1, kod ten jest dla kaŝdego satelity inny - daje moŝliwość identyfikacji satelity, przy normalnym odbiorze do złudzenia przypominają one szum - nazywa się je sygnałem pseudolosowym (PRN - Pseudo - Random Noise). Kod C/A jest sygnałem binarnym, nadawanym z prędkością transmisji Mb/s. Jego podobieństwo do szumu bierze się z długiego okresu - powtarza się on co 1023 bity. Sekwencja ta jest inna dla kaŝdego satelity. Dzięki temu odbiorniki są w stanie rozróŝnić sygnały z poszczególnych źródeł. 22
23 Ad b/ kod P/Y (Precise) moduluje zarówno podnośną L1 jak i L2. Dostęp do kodu P pozwala na osiąganie dokładności przeznaczonych do zastosowań militarnych. Kod P jest pozornie podobny do kodu C/A, ale ma bardziej złoŝoną strukturę. Jego prędkość transmisji wynosi MHz. Jest on właściwie sekwencją trwającą 267 dni. KaŜdy z satelitów ma przypisany mniej-więcej ośmiodniowy segment tej sekwencji, będący jego kodem PRN. 23
24 ad c/ depesza nawigacyjna moduluje L1. Na sygnały P i C/A nałoŝona jest depesza nawigacyjna, uaktualniana co cztery godziny ze stacji naziemnych. Depesza zawiera między innymi almanach - dane dotyczące aktualnego stanu systemu, w tym przybliŝone elementy orbitalne wszystkich satelitów, których znajomość przyśpiesza proces akwizycji i efemerydę - dokładne elementy orbitalne satelity nadającego depeszę, niezbędne do wyznaczania czasu i pozycji. Dodatkowo transmitowane są dane o stanie satelitów, aktualne współczynniki do obliczenia opóźnienia jonosferycznego i dane do obliczenia czasu UTC (GPS Satellite Universal Coordinated Time). 24
25 Pokładowymi wzorcami czasu są cztery zegary atomowe (dwa rubidowe i dwa cezowe). Dokładność pomiaru czasu wynosi 340 nanosekund dla SPS (Standard Positioning Service) i 100 ns dla PPS (Precise Positioning Service) Tak wysoka dokładność jest konieczna, poniewaŝ błąd rzędu miliardowej części sekundy powoduje błąd pomiaru rzędu 50 cm. Zakładana dokładność pomiaru czasu PPS (zastosowania militarne) skutkuje dokładnościami pomiaru pozycji: 22 metry horyzontalnie 27.7 metry wertykalnie 200 nanosekundy dokładność w pomiarze czasu Zakładana dokładność pomiaru czasu SPS (zastosowania cywilne) skutkuje dokładnościami pomiaru pozycji: 100 metry horyzontalnie 156 metry wertykalnie 340 nanosekundy dokładność w pomiarze czasu 25
26 26
27 Na depeszę nawigacyjną składa się 25 ramek, kaŝda złoŝona z 1500 bitów. PoniewaŜ wiele pozycji z depeszy jest powtarzane, odebranie wszystkich 25 ramek zajmuje 12.5 minuty przy szybkości transmisji 50 bitów na sekundę. Docierające do odbiornika sygnały pseudolosowe satelitów są przesunięte względem swoich częstotliwości zasadniczych wskutek zjawiska Dopplera; zaleŝnie od połoŝenia odbiornika względem torów lotu satelitów. Odbiornik musi zatem przeczesać pasmo radiowe w którym naleŝy się spodziewać uŝytecznych sygnałów. Odnalezione sygnały satelitów muszą zostać sprawdzone czy nadają się do wykorzystania, poniewaŝ poziom sygnału odbieranego przy powierzchni Ziemi jest niŝszy od poziomu szumów. 27
28 Odbiornik jest gotów do rozpoczęcia nawigacji po złapaniu pod śledzenie czterech satelitów, osiągnięciu synchronizacji i odczytaniu depeszy nawigacyjnej. Dlatego od włączenia odbiornika do otrzymania pierwszego odczytu musi minąć pewien czas, określany jako czas akwizycji (TIFF - Time to First Fix), który jest jednym z podstawowych parametrów określających klasę (i cenę) odbiornika. Z odległości do czterech śledzonych satelitów i danych o ich trajektorii procesor wylicza współrzędne przestrzenne odbiornika. Zazwyczaj odbiorniki aktualizują swoje dane raz na sekundę. Dla określenia przewidywanej konfiguracji satelitów niezbędna jest znajomość almanachu, przybliŝonej pozycji, przybliŝonego czasu. Jeśli odbiornik nie posiada tych informacji, wyboru satelitów dokonuje się w sposób dowolny, częstotliwości generatorów pętli fazowych wybierane są kolejno z całego zakresu częstotliwości dopplerowskich. 28
29 Procedura obliczania pozycji początkowej rozpoczyna się od określenia widzialnych satelitów. KaŜdy odbiornik ma w pamięci wzorce kodów PRN wszystkich satelitów (34 kody). Wzorce te są przyrównywane po kolei do odbieranych sygnałów do momentu zidentyfikowania jednego, co oznacza rozpoczęcie śledzenia. Śledząc satelitę odbiornik demoduluje depeszę nawigacyjną i odczytuje dane almanachu o wszystkich satelitach w konstelacji. Na podstawie danych efemerycznych i almanachu synchronizuje swój zegar wewnętrzny z zegarami satelitów i uwzględnia wszystkie konieczne dane korekcyjne. MoŜliwość określenia satelitów które mogą znaleźć się w zasięgu i ograniczenie ilości sprawdzanych kodów PRN znacznie skraca czas poszukiwania. Drogie odbiorniki profesjonalne pamiętają zarówno dokładny czas, jak i prognozowane trasy satelitów. Czas akwizycji takich odbiorników jest dosyć krótki, o ile zbyt radykalnie nie zmieni się jego lokalizacji w czasie "uśpienia". 29
30 Akwizycja sygnałów GPS W procesie inicjacji odbiornika nawigacyjnego SPS wykonywane są między innymi następujące czynności: określenie przewidywanej konfiguracji satelitów, dopplerowskich przesunięć częstotliwości, wstępne ustawienie częstotliwości generatorów pętli fazowych, przesuwanie serii pseudolosowych kodu C/A odpowiadających wybranym satelitom do momentu uzyskania korelacji z sygnałami satelitarnymi, w momencie wykrycia korelacji włączenie automatycznych mechanizmów sterujących pętli fazowych i kodowych, synchronizacja bitowa sygnałów, odbiór efemerydy, wyznaczanie pozycji i poprawki czasu zegara odbiornika, odbiór almanachu. 30
31 Pozycja przestrzenna obliczona odległości od satelitów byłaby odniesiona do orbity satelitów, podczas gdy rzeczywiste parametry pozycyjne są odnoszone do powierzchni Ziemi, a konkretnie uśrednionego poziomu morza. Satelitarny system nawigacyjny musi zatem uŝywać uniwersalnego układu odniesienia. Geodezyjny układ odniesienia jest matematycznym modelem kształtu Ziemi, jak najlepiej dopasowanym do rzeczywistej geoidy. Definiuje się go poprzez wielkość i kształt elipsoidy i połoŝenie środka elipsoidy w odniesieniu do środka Ziemi. Obecnie uŝywany układ odniesienia WGS-84 (World Geodetic System 1984) opisuje elipsoidę której dłuŝsza oś ma długość km, a współczynnik spłaszczenia wynosi 1/ WGS 84 jest wykorzystywany przez system GPS od stycznia 1987 roku 31
32 Dostęp do kodu P daje moŝliwość natychmiastowego określania pozycji z dokładnością do 10 m, a przy uŝyciu kodu C/A 15 do 20 m, przy 95% poziomie ufności. Sztucznie wprowadzone i niektóre naturalne ograniczenia dokładności mogą być w duŝym stopniu wyeliminowane Wpływ SA i anti-spoofingu (rozmyślnie wprowadzone błędy w sygnałach SPS, znane jako SA (Selective Availability) i Anti-spoofing), a takŝe wielu czynników naturalnych moŝna praktycznie wyeliminować przy zastosowaniu technik róŝnicowych. Techniki te polegają na wykorzystaniu poprawek wyznaczanych i rozpowszechnianych przez precyzyjnie zlokalizowane naziemne stacje referencyjne. 32
33 Budowa odbiornika GPS 33
34 3. Błędy GPS Błędy GPS mogą być rozmaitej natury. Ogólnie moŝna je podzielić na błędy wynikające z: przyczyn technicznych przyczyn naturalnych. Są one kombinacją: A/ noise - szumów nadajnika i odbiornika, B/ bias złej synchronizacji z zegarem satelitów C/ blunders - popełnianych róŝnych innych pomyłek 34
35 3. Błędy GPS 35
36 3. Błędy GPS Ad a/ błędy wynikające z szumów są kombinacją efektu szumów kodu PRN (około 1m) i szumów wnoszonych przez odbiornik (około 1m) Ad b/ błędy podstawy wynikają z ograniczonego dostępu i z innych czynników Ograniczony dostęp Selective Availability (SA) dostęp jest degradowany przez zmianę poziomu odniesienia sygnałów przez DOD. Potencjalna dokładność kodu C/A około 30 m jest redukowana do 100 m. Poziomy S.A. Na kaŝdym satelicie są nieco róŝne i obliczona pozycja jest wynikiem danych z kilku satelitów. Poprawki S.A. są wolnozmienne. Od 1 maja 2000 roku na mocy decyzji prezydenta Clintona sygnał SA został wyłączony do odwołania. Nie oznacza to moŝliwości ewentualnego ponownego włączenia tego sygnału. 36
37 Inne źródła błędów podstawy: 3. Błędy GPS Błąd zegara satelity. RóŜnica pomiędzy idealnym czasem GPS a wskazaniem zegara satelity skutkuje błędem połoŝenia około 1 m. Błąd efemeryd. Polega na róŝnicy między połoŝeniem satelity, wyliczonym z danych orbitalnych a rzeczywistym. Powodowany jest przez grawitację Słońca i KsięŜyca, a takŝe wiatr słoneczny. Poprawki róŝnicowe eliminują ten błąd prawie całkowicie 1 m. Opóźnienie troposferyczne. Opóźnienie to powstaje w dolnych warstwach atmosfery i jest zaleŝne od temperatury, ciśnienia i wilgotności. MoŜe wynosić od 1 do 3 metrów. Opóźnienie jonosferyczne. Błąd odległości wywołany opóźnieniem w propagacji fal radiowych wynosi od metrów w dzień do 3-6 metrów w nocy (średnio 10 m). Wielodrogowość fal. Wynika z odbić fal w pobliŝu odbiornika, niemoŝliwe do skompensowania 0.5 m błedu 37
38 3. Błędy GPS Ad c/ błędy wynikające z popełnianych pomyłek mogą dochodzić do setek kilometrów - błędy popełniane w ośrodku kontroli, błędy oprogramowania, błędy obsługi popełniane przez ludzi, - Błędy popełniane prze uŝytkowników, np. przyjęcie niewłaściwych danych odniesienia geograficznego itp. - Błędy odbiornika wynikające z przyjęcia błędnego oprogramowania itp. 38
39 Geometryczne rozmycie dokładności Niedokładność samego wyznaczania geometrycznej pozycji względem połoŝenia satelitów nazywa się geometrycznym rozmyciem dokładności - Geometric Dilution of Precision (GDOP). 39
40 Geometryczne rozmycie dokładności Rozmycie moŝe dotyczyć: pomiarów poziomych (Horizontal DOP - HDOP) - długość i szerokość geograficzna pomiarów pionowych (Vertical DOP - VDOP) - wysokość pozycji (Position DOP - PDOP) - stosunek pomiędzy błędem w obliczeniu pozycji uŝytkownika a błędem w obliczeniu pozycji satelity pomiarów geometrycznych (Geometrical DOP - GDOP) - dotyczy pomiarów współrzędnych przestrzennych czasu (Time DOP - TDOP) - dotyczy błędu czasu systemowego, MoŜliwe jest osiągnięcie dokładności określenia pozycji od 1-10 metrów bazując na kodzie C/A i sygnałach SPS. Dla wyeliminowania błędów satelitarnych i wpływu zakłóceń, a takŝe w celu ominięcia ograniczeń dokładności w sygnałach GPS, stworzono system korekcji, określany jako róŝnicowy GPS (DGPS - Differential GPS). 40
41 4. Technologia pomiarów DGPS DGPS - Differential GPS, polega na korygowaniu współrzędnych wyznaczanych metodą pseudoodległości przez odbiornik będący w ruchu (mobile receiver) przy pomocy poprawek wysyłanych przez stację referencyjną, której współrzędne wyraŝone w odpowiednim układzie współrzędnych (np. WGS 84, EUREF 89) są znane. Stacja referencyjna określa poprawki na zasadzie porównania pozycji uzyskanej z aktualnych pomiarów satelitarnych ze znaną pozycją stacji. Poprawki do pomierzonych odległości do satelitów są przesyłane telemetrycznie w czasie prawie rzeczywistym przy wykorzystaniu nadajników radiowych (LW, UHF), telefonii komórkowej GSM do odbiornika ruchomego lub internetu. 41
42 Stacje referencyjne w Polsce Identyfikator Lokalizacja Współrzędne anteny D1 Dziwnów N D2 Rozewie N E D3 Józefosław N E D4 Borowa Góra k/warszawy N E D5 Lamkówko N E 42
43 43
44 P. H. Dana 44
45 5. Pomiary względne Przełom w zakresie wykorzystania Globalnego Systemu Pozycjonowania do precyzyjnych pomiarów w geodezji nastąpił w wyniku zastosowania nowych metod obserwacyjnych: interferometrii satelitarnej oraz pomiarów fazowych, stwarzających moŝliwość uwolnienia się od korzystania z informacji zawartych w kodach modulujących sygnały satelitarne. Podstawą konstruowania modeli matematycznych pomiarów fazowych jest róŝnica faz fali nośnej sygnału emitowanego przez satelitę oraz sygnału wzorcowego, generowanego przez odbiornik. Stosowane są następujące modele: pojedyncza róŝnica faz między satelitami, podwójne róŝnicowanie, potrójne róŝnicowanie. 45
46 46
47 6. Metody pomiarów GPS uŝywane w geodezji Metoda statyczna - wymagająca kilkudziesięciominutowej lub nawet kilkugodzinnej sesji obserwacyjnej (dla uzyskania dokładności milimetrowej) przy uŝyciu co najmniej dwóch odbiorników GPS. Odległości między odbiornikami mogą wynosić od kilkudziesięciu centymetrów do kilkuset kilometrów. Metoda pozwala na uzyskiwanie dokładności subcentymetrowych i moŝe być stosowana do tworzenia geodezyjnych osnów podstawowych i szczegółowych. Metoda rapid static - jest to metoda statyczna, realizowana przy uŝyciu odbiorników GPS nowszej generacji. Jeden z odbiorników jest ustawiany na punkcie będącym okresową stacją referencyjną (stacją odniesienia), a pozostałe odbiorniki są przemieszczane od punktu do punktu. Zaletą odbiorników tej generacji jest moŝliwość znacznego skrócenia sesji obserwacyjnej. Przy odległości między punktami równej 15 km, subcentymetrową dokładność wzajemnego połoŝenia punktów moŝna uzyskać na podstawie wyników sesji obserwacyjnej, trwającej od 5 do 10 minut. 47
48 6. Metody pomiarów GPS uŝywane w geodezji Metoda kinematyczna ze statyczną inicjalizacją - jest to metoda stosowana do wyznaczania trajektorii poruszających się obiektów lub teŝ do wyznaczania współrzędnych punktów geodezyjnych techniką. Dokładność tej metody moŝna ocenić na 1-2 cm + 1ppm długości linii. Metody czasu rzeczywistego Real-Time-Kinematic (RTK) z inicjalizacją On-The-Fly (OTF) - metody te umoŝliwiają szybkie (prawie natychmiastowe) wyznaczenie połoŝenia centrum fazowego anteny satelitarnej odbiornika z dokładnością 1-3 cm. W precyzyjnej nawigacji i kierowaniu maszynami ruchomy odbiornik przemieszcza się w sposób ciągły i np. co 1 sekundę wyznaczane są dyskretne pozycje jego trajektorii. W geodezji, obserwator w ciągu kilku lub kilkunastu sekund dokonuje wyznaczeń pozycji kolejnych punktów, na których ustawiono antenę satelitarną. 48
49 7. System satelitarny Glonass 49
50 7. System satelitarny Glonass ГЛОНАСС; ГЛОбальная НАвигационная Спутниковая Система; Globalnaja Nawigacionnaja Sputnikowaja Sistiema Pierwszy satelita Glonass został wyniesiony 12 października 1982, ale system formalnie ruszył 24 września 1993 roku. Satelity Glonass są konstruowane i budowane w Krasnojarsku w południowej Syberii Obecnie w kosmosie znajduje się 17 satelitów, w tym dwa nowej generacji oznaczone literą M. Poruszają się one po orbitach kołowych, nachylonych do płaszczyzny równika pod kątem 64,8, na wysokości km. KaŜdy satelita okrąŝa Ziemię w 11 godzin 15 minut. Oznacza to, Ŝe przy pełnej konstelacji składającej się z 24 satelitów w kaŝdym punkcie na Ziemi i o kaŝdej porze widocznych będzie co najmniej 5 z nich. 50
51 7. System satelitarny Glonass Satelity GLONASS, podobnie jak GPS, emitują dwa rodzaje sygnałów: - L1 = 1602 MHz + n*0,5625 MHz - Standard precision (SP), - L2 = 1246 MHz + n*0,4375 MHz - High precision (HP), Gdzie n jest numerem kanału (n = 1, 2, ). Oznacza to, Ŝe kaŝdy satelita generuje sygnał pomiarowy o innej częstotliwości. Dane efemeryczne satelitów wyznaczane są w ziemskim układzie odniesienia PZ-90. Czas mierzony przez zegary atomowe na satelitach odniesiony jest do rosyjskiego państwowego wzorca czasu o nazwie ETALON. 51
52 Porównanie GPS NAVSTAR i Glonass System GPS GLONASS Rozmieszczenie: Liczba satelitów Liczba planów orbitalnych 6 3 Inklinacja* (deg) 55 65,8 Wysokość orbit (km) Czas okrąŝenia Ziemi (hr:min) 11:58:00 11:16:00 Geodezyjny układ odniesienia WGS 84 PZ 90 (SGS 85) Charakterystyka sygnału: L1: n Częstotliwość nośna (MHz) SPS L1: (n=1,2,...,24) L2: n, Częstotliwość nośna (MHz) PPS L2: (n=1,2,...,24) C/A code: C/A: Częstotliwość sygnałów (MHz) Transmisja danych (bity/s) P code: P : Metoda kodowania CDMA FDMA Dokładność systemu (standard) Pozioma (m): 100 Pionowa (m): 100 Prędkość 15 cm/s Pozioma (m): Pionowa (m): 70 Prędkość 15 cm/s 52
53 7. Segment naziemny Glonass SCC (System Control Center Centrum Kontroli Systemu): Krasnoznamieńsk TT&C (Telemetry, Tracking and Control Stacja Kontrolna): Sankt Petersburg, Szelkowo, Jenisejsk, Komsomolsk nad Amurem TT&C Planowane: Mendelejewo, Nowosybirsk, Irkuck, Kabarowsk 53
54 Standardowe dokładności pomiarowe: - horyzontalna metrów (prawdopodobieństwo 99.7%), - wertykalna 70 metrów (prawdopodobieństwo 99.7%), - Dokładność określania czasu 1 mks (prawdopodobieństwo 99.7%). Dokładności te mogą ulec znaczącemu polepszeniu po zastosowaniu nowoczesnych technik fazowych. Obecnie trwają prace nad przyspieszeniem wymiany stacji. Do 2010 roku ma obejmować 24 satelity nowej generacji. Ilość działających satelitów Glonass ciągle się zmienia. Obecnie jest ich 12 (stan na ) 54
55 55
56 Odbiornik GPS odbierający i przetwarzający sygnały z satelitów GLONASS musi dokonać kilku dodatkowych czynności: - Odebrać dane na kilku częstotliwościach, - Przeliczyć dane do układu WGS-84, - Przekonwertować czas rosyjski na UTC (Coordinated Universal Time) dokładnie czas Moskiewski - Moscow Time (UTC+0300) Obecnie są robione takie odbiorniki. Nad Warszawą widać czasami tylko 2 satelity, ale w godzinach pracy produkcyjnej geodetów ( ) jest ich juŝ zawsze
57 G.P.S. G.P.S. + GLONASS 57
58 8. System satelitarny Galileo Pod koniec roku 1999 w ramach Unii Europejskiej podpisano porozumienie o budowie nowego satelitarnego systemu nawigacyjnego GALILEO. Państwa załoŝycielskie to Francja, Niemcy Wielka Brytania i Włochy. Projekt współfinansuje równieŝ Europejska Agencja Kosmiczna ESA. 58
59 ZałoŜenia systemu 1.Galileo ma byś systemem europejskim niezaleŝnym od Stanów Zjednoczonych. 2. Galileo ma być systemem cywilnym, w odróŝnieniu od GPS NAVSTAR, który jest prowadzony i kontrolowany przez Armię USA. 3. System będzie kompatybilny z systemem GPS, poniewaŝ satelity Galileo uŝywają tych samych częstotliwości do przesyłania danych do odbiorników co satelity GPS. 59
60 ZałoŜenia systemu Segment satelitarny systemu Galileo ma stanowić 30 satelitów, z czego 27 będą stanowić satelity operacyjne, oraz 3 zapasowe aktywne. Będą krąŝyć na trzech planach orbitalnych o inklinacji 56 i wysokości kilometrów. Satelity będą transmitowały następujące informacje: dane pozycyjne dokładny czas informacje o wiarygodności tych danych dane o ewentualnych awariach systemu System zostanie uruchomiony w 2008 roku, obecnie z kosmodromu Bajkonur wystrzeliwane są pierwsze satelity. 60
61 Usługi oferowane przez system Galileo System Galileo będzie oferował pięć rodzajów usług: Usługi ogólnie dostępne ( Open Access Service OAS): podstawowe usługi określania połoŝenia i czasu. Będą one bezpłatne, dostępne publicznie i w nieograniczony sposób. Usługi chroniące Ŝycie ( Safety-of-Life SoL): zawierają one usługi AOS, dodatkowo posiadają sygnał potwierdzający wiarygodność otrzymywanych danych. Ma to ogromne znaczenie w obszarach, gdzie niespójność danych mogłaby naraŝać Ŝycie innych osób, np. w transporcie kolejowym morskim czy lotniczym. 61
62 Usługi Komercyjne (Commercial Service CS), do zastosowań biznesowych, gdzie potrzebna jest większa wydajność i dokładność niŝ OAS. Usługi Publicznie Regulowane ( Public Regulated Service PRS), dostępne tylko do zastosowań kontrolowanych przez administrację państwową, takich jak obrona cywilna czy obronność. Usługi poszukiwawcze i ratownicze ( Search and Rescue Service SAR), powszechnie dostępne dla wszystkich zainteresowanych, bezpłatne, zapewniające precyzyjną lokalizację i komunikację zwrotną pomiędzy wysyłającym sygnał ratunkowy a operatorem usługi. 62
63 Pierwszy satelita testowy GIOVE-A (28 grudnia 2005 r.) Wystrzelony z kosmodromu Bajkonur przez rakietę Sojuz-Fregat. Nazwa satelity GIOVE-A Galileo In-Orbit Validation Element 12 stycznia o godzinie czasu GMT satelita GIOVE wyemitował pierwsze sygnały nawigacyjne. Waga 600 kg. WyposaŜony w precyzyjny układ układ zliczający. Koszt wdroŝenia szacowany na 3 mld euro. Ukończenie projektu przewidywane na 2010 rok. 63
64 9. Przewidywany rozwój technologii satelitarnego wyznaczania pozycji Krajowe systemy permanentnych stacji satelitarnych moŝna uznać za osnowy geodezyjne nowej generacji. Cele tworzenia krajowych systemów stacji referencyjnych: UmoŜliwienie zespołowi pomiarowemu, wyznaczenie pozycji z wymaganą dokładnością, w dowolnym rejonie kraju Dostarczenie obserwacji nadliczbowych przy kaŝdorazowym wyznaczaniu pozycji, Dostarczenie danych do monitorowania zmian układu odniesienia w czasie oraz do prowadzenia badań geodynamicznych. 64
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Dokładność pozycji. dr inż. Stefan Jankowski
 Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
Dokładność pozycji dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl Nawigacja Nawigacja jest gałęzią nauki zajmującą się prowadzeniem statku bezpieczną i optymalną drogą. Znajomość nawigacji umożliwia
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów
 System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Lokalizacja Global Positioning System. Systemy nawigacji satelitarnej
 Lokalizacja Global Positioning System Systemy nawigacji satelitarnej Radionawigacja Wykorzystanie fal radiowych do określenia własnego połoŝenia i wyznaczenia dalszej drogi Systemy radionawigacyjne korzystają
Lokalizacja Global Positioning System Systemy nawigacji satelitarnej Radionawigacja Wykorzystanie fal radiowych do określenia własnego połoŝenia i wyznaczenia dalszej drogi Systemy radionawigacyjne korzystają
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
O technologii pomiarów GPS RTK (Real Time Kinematic)
") 1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
1. Wstęp O technologii pomiarów GPS RTK (Real Time Kinematic) Pomiar RTK to na dzień dzisiejszy najnowocześniejsza na świecie technologia dokładnych pomiarów uzyskiwanych w czasie rzeczywistym bez wykonywania
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS. Acta Scientifica Academiae Ostroviensis nr 30, 19-32
 Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Podstawy Geomatyki. Wykład III Systemy GNSS
 Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:") PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
Kartografia - wykład
 prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Dwa podstawowe układy współrzędnych: prostokątny i sferyczny
 Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
GEOMATYKA program rozszerzony 2015-2016 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Globalny Nawigacyjny System Satelitarny GPS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Ograniczenia GPS. błędy spowodowane zmiennością opóźnień: jonosferycznego i troposferycznego, niedokładności efemeryd, błędy zegara satelity,
 DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Obszar badawczy i zadania geodezji satelitarnej
 Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 3 SYGNAŁ GPS STRUKTURA
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 3 SYGNAŁ GPS STRUKTURA 1 SEGMENT KOSMICZNY NAVSTAR-GPS 2 Ewolucja spektrum (widma) sygnałów GPS 3 Dwa rodzaje serwisów dostępnych dla użytkowników GPS: SPS i PPS.
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 3 SYGNAŁ GPS STRUKTURA 1 SEGMENT KOSMICZNY NAVSTAR-GPS 2 Ewolucja spektrum (widma) sygnałów GPS 3 Dwa rodzaje serwisów dostępnych dla użytkowników GPS: SPS i PPS.
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
SATELITARNE TECHNIKI POMIAROWE
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ SATELITARNE TECHNIKI POMIAROWE CZĘŚĆ 1a. WPROWADZENIE DO POMIARÓW SATELITARNYCH Opracowanie: Leszek
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ SATELITARNE TECHNIKI POMIAROWE CZĘŚĆ 1a. WPROWADZENIE DO POMIARÓW SATELITARNYCH Opracowanie: Leszek
BADANIE WPŁ YWU GEOMETRII SYSTEMU NA DOKŁ ADNOŚĆ OKREŚ LANIA POZYCJI ZA POMOCĄ ODBIORNIKA GPS
 ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK XLIX NR 4 (175) 2008 Andrzej Banachowicz Akademia Marynarki Wojennej Ryszard Bober, Tomasz Szewczuk, Adam Wolski Akademia Morska w Szczecinie BADANIE WPŁ
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ
 WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
WYZNACZANIE WYSOKOŚCI Z WYKORZYSTANIEM NIWELACJI SATELITARNEJ Karol DAWIDOWICZ Jacek LAMPARSKI Krzysztof ŚWIĄTEK Instytut Geodezji UWM w Olsztynie XX Jubileuszowa Jesienna Szkoła Geodezji, 16-18.09.2007
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
Czym jest EDGE? Opracowanie: Paweł Rabinek Bydgoszcz, styczeń 2007 http://blog.xradar.net
 Czym jest EDGE? Opracowanie: Paweł Rabinek Bydgoszcz, styczeń 2007 http://blog.xradar.net Wstęp. Aby zrozumieć istotę EDGE, niezbędne jest zapoznanie się z technologią GPRS. General Packet Radio Service
Czym jest EDGE? Opracowanie: Paweł Rabinek Bydgoszcz, styczeń 2007 http://blog.xradar.net Wstęp. Aby zrozumieć istotę EDGE, niezbędne jest zapoznanie się z technologią GPRS. General Packet Radio Service
Dlaczego system GPS latającym Einsteinem jest?
 Dlaczego system GPS latającym Einsteinem jest? (Dżipiesomania) dr hab. inż. Włodzimierz Salejda, prof. nadzw. PWr, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/
Dlaczego system GPS latającym Einsteinem jest? (Dżipiesomania) dr hab. inż. Włodzimierz Salejda, prof. nadzw. PWr, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG. Acta Scientifica Academiae Ostroviensis nr 30, 69-75
 Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
GLOBALNY SYSTEM POZYCJONOWANIA (GPS) DLA TWORZENIA GIS
 DLA TWORZENIA GIS") GIS I TELEDETEKCJA W BADANIACH STRUKTURY I FUNKCJONOWANIA KRAJOBRAZU A. NIENARTOWICZ, M. KUNZ (RED.) TORUŃ 2001 Mieczysław Kunz Uniwersytet Mikołaja Kopernika w Toruniu Wydział Biologii i Nauk o Ziemi
GIS I TELEDETEKCJA W BADANIACH STRUKTURY I FUNKCJONOWANIA KRAJOBRAZU A. NIENARTOWICZ, M. KUNZ (RED.) TORUŃ 2001 Mieczysław Kunz Uniwersytet Mikołaja Kopernika w Toruniu Wydział Biologii i Nauk o Ziemi
Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi. Ewa Dyner Jelonkiewicz. ewa.dyner@agtes.com.pl Tel.
 TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
WYKORZYSTANIE ODBIORNIKÓW LEICA GPS 1200 W GEODEZYJNYCH POMIARACH TERENOWYCH
 WYKORZYSTANIE ODBIORNIKÓW LEICA GPS 1200 W GEODEZYJNYCH POMIARACH 93 Łukasz Śliwiński WYKORZYSTANIE ODBIORNIKÓW LEICA GPS 1200 W GEODEZYJNYCH POMIARACH TERENOWYCH Wstęp Dynamicznie rozwijająca się technologia
WYKORZYSTANIE ODBIORNIKÓW LEICA GPS 1200 W GEODEZYJNYCH POMIARACH 93 Łukasz Śliwiński WYKORZYSTANIE ODBIORNIKÓW LEICA GPS 1200 W GEODEZYJNYCH POMIARACH TERENOWYCH Wstęp Dynamicznie rozwijająca się technologia
Wykorzystanie techniki DGPS do dokładnego wyznaczania pozycji
 Politechnika Poznańska Wydział Elektryczny Instytut Elektroniki i Telekomunikacji Piotr Parus Wykorzystanie techniki DGPS do dokładnego wyznaczania pozycji Praca magisterska pod kierunkiem: dr inŝ. Krzysztofa
Politechnika Poznańska Wydział Elektryczny Instytut Elektroniki i Telekomunikacji Piotr Parus Wykorzystanie techniki DGPS do dokładnego wyznaczania pozycji Praca magisterska pod kierunkiem: dr inŝ. Krzysztofa
Laboratorium z Miernictwa Górniczego
 Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
Laboratorium z Miernictwa Górniczego Materiały pomocnicze I Planowanie warunków obserwacji satelitów GPS/GLONASS Opracował dr inż. Jan Blachowski jan.blachowski@pwr.wroc.pl, pok. 505, bud. K-1, tel. 320
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Rozwój systemów GNSS
 Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Rozwój systemów GNSS dr inż. hab. Paweł Wielgosz, prof. UWM Wykorzystanie systemu wspomagania pomiarów satelitarnych
Uniwersytet Warmińsko-Mazurski w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Rozwój systemów GNSS dr inż. hab. Paweł Wielgosz, prof. UWM Wykorzystanie systemu wspomagania pomiarów satelitarnych
Ćwiczenie 3 Komunikacja szeregowa z odbiornikiem GPS w technologii.net Compact Framework
 System GPS i jego zastosowania Laboratorium Ćwiczenie 3 Komunikacja szeregowa z odbiornikiem GPS w technologii.net Compact Framework Wstęp W ramach ćwiczenia Student zapozna się z podstawami odczytu danych
System GPS i jego zastosowania Laboratorium Ćwiczenie 3 Komunikacja szeregowa z odbiornikiem GPS w technologii.net Compact Framework Wstęp W ramach ćwiczenia Student zapozna się z podstawami odczytu danych
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Artur KRÓL 1 Tadeusz STUPAK 2 system nawigacji zintegrowanej, radar, system automatycznej identyfikacji elektroniczna
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Artur KRÓL 1 Tadeusz STUPAK 2 system nawigacji zintegrowanej, radar, system automatycznej identyfikacji elektroniczna
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 12 1 Redukcje obserwacji GPS i zaawansowane pakiety programów redukcyjnych Etapy procesu redukcji obserwacji GPS Procesy obliczeniowe prowadzące od zbiorów obserwacji
Czy da się zastosować teorię względności do celów praktycznych?
 Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
PRZETWARZANIE TRIMBLE HD-GNSS
 PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący Google Maps i środowisko LabView
 Maciej Krzanowski, Mateusz Mrozowski, Mateusz Oszajca V rok Koło Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący
Maciej Krzanowski, Mateusz Mrozowski, Mateusz Oszajca V rok Koło Techniki Cyfrowej dr inż. Wojciech Mysiński opiekun naukowy GPS module based on Google Maps and LabView environment Rejestrator GPS wykorzystujący
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP
 SZTAB GENERALNY WP ZARZĄD KIEROWANIA I DOWODZENIA P6 WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP ppłk rez. Włodzimierz Głogowski WGlogowski@mon.gov.pl Oddział Identyfikacji
SZTAB GENERALNY WP ZARZĄD KIEROWANIA I DOWODZENIA P6 WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP ppłk rez. Włodzimierz Głogowski WGlogowski@mon.gov.pl Oddział Identyfikacji
roku system nawigacji satelitarnej TRANSIT. System ten wykorzystywano
 System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
System nawigacji K U R S satelitarnej GPS, część 1 Od historii do przyszłości Wiele osób zajmujących się amatorsko, a nieraz i profesjonalnie elektroniką nie zdaje sobie w pełni sprawy z ogromnego postępu,
Cospa Cos s pa - Sa - Sa a rs t
 Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ
 POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ Mikołaj KSIĘŻAK Seminarium Dyplomowe
POLITECHNIKA RZESZOWSKA im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania GPS BUDOWA I ZASTOSOWANIE SYSTEMU NAWIGACJI SATELITARNEJ Mikołaj KSIĘŻAK Seminarium Dyplomowe
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1
 w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1") Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
Ustawienia trybu pomiarów statycznych (Static) w oprogramowaniu Spectrum Survey Field dla odbiornika Sokkia GRX-1 (Opracowanie: I.Romanyszyn) Czynność Wyświetlacz 1. Włączamy odbiornik. Czekamy na załadowanie
O monitoringu pojazdów GPS/GSM wykład 1
 O monitoringu pojazdów GPS/GSM wykład 1 Dr inż. Jacek Mazurkiewicz Instytut Informatyki, Automatyki i Robotyki e-mail: Jacek.Mazurkiewicz@pwr.wroc.pl Historia zjawiska w 1957 naukowcy z John Hopkins University
O monitoringu pojazdów GPS/GSM wykład 1 Dr inż. Jacek Mazurkiewicz Instytut Informatyki, Automatyki i Robotyki e-mail: Jacek.Mazurkiewicz@pwr.wroc.pl Historia zjawiska w 1957 naukowcy z John Hopkins University
KOMPONENTY INERCJALNE
 KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
KATALOG 2016/2017 KOMPONENTY INERCJALNE rozwiązania firmy NovAtel (Kanada) GPS.PL ul. Jasnogórska 23 31-358 Kraków tel. (012) 637 71 49 fax (012) 376 77 27 www.gps.pl C e n t r u m T e c h n i k L o k
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. Rysunek 1. Centrum monitoringu w Komendzie Miejskiej Policji w Gdańsku.
 System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
System informacji przestrzennej w Komendzie Miejskiej w Gdańsku. W Gdańsku tworzony jest obecnie miejski System Informacji Przestrzennej, który będzie stanowił podstawę m.in. Systemu Ratownictwa Miejskiego
RYS HISTORYCZNY GEODEZYJNE POMIARY SATELITARNE PRZED EPOKĄ GPS
 RYS HISTORYCZNY GEODEZYJNE POMIARY SATELITARNE PRZED EPOKĄ GPS PRZYPOMNIENIE PODSTAWOWYCH INFORMACJI O SYSTEMACH SATELITARNYCH: TRANSIT, CYKADA, NAVSTAR/GPS, GLONASS, GALILEO, BEIDOU I INNE AKTUALNY STATUS
RYS HISTORYCZNY GEODEZYJNE POMIARY SATELITARNE PRZED EPOKĄ GPS PRZYPOMNIENIE PODSTAWOWYCH INFORMACJI O SYSTEMACH SATELITARNYCH: TRANSIT, CYKADA, NAVSTAR/GPS, GLONASS, GALILEO, BEIDOU I INNE AKTUALNY STATUS