SATELITARNE TECHNIKI POMIAROWE WYKŁAD 3 SYGNAŁ GPS STRUKTURA
|
|
|
- Władysława Sowa
- 5 lat temu
- Przeglądów:
Transkrypt

1 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 3 SYGNAŁ GPS STRUKTURA 1

2 SEGMENT KOSMICZNY NAVSTAR-GPS 2
 sygnałów")
3 Ewolucja spektrum (widma) sygnałów GPS 3
4 Dwa rodzaje serwisów dostępnych dla użytkowników GPS: SPS i PPS. SPS (Standard Positioning Service) usługa umożliwiająca uzyskanie informacji o bieżącej pozycji i czasie dostarczana na częstotliwości GPS L1. Częstotliwość GPS L1, transmitowana przez wszystkie satelity GPS, zawierała kod C/A (coarse-acquisition) i depeszę nawigacyjną (navigation data message). Wprowadzane są nowe częstotliwości i modyfikowane są kody. PPS (Precise Positioning Service) usługa dostępna dla autoryzowanych użytkowników. Sygnał SPS oraz kod P(Y) (precise) na obu częstotliwościach GPS: L1 i L2. 4

5 Zalewski P., GNSS GPS 5
6 Elementy sygnału satelity GPS przed L5 6
: 10.23 x 154 L1: 1575.42 MHz pierwsza częstotliwość nośna ~19.")
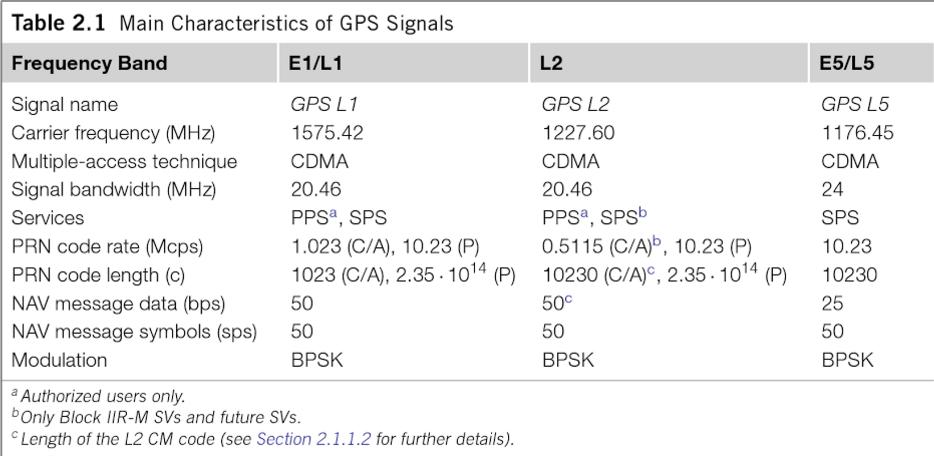
7 Satelity GPS wyposażone są w zegary atomowe (cezowe i rubidowe). Obecnie w nowych satelitach wykorzystuje się zegary rubidowe i masery wodorowe. Wytwarzają one wysokostabilną częstotliwość podstawową L MHz ± s Z niej wywodzą się częstotliwości nośne (carriers): x 154 L1: MHz pierwsza częstotliwość nośna ~19.05 cm, x 120 L2: MHz druga częstotliwość nośna ~24.45 cm, x 115 L5: MHz trzecia częstotliwość nośna ~25.48 cm. 7
8 Obecnie sygnał GPS wygląda następująco: Częstotliwość L1 ( MHz) kody P(Y), M, C/A, L1C (planowany), Częstotliwość L2 ( MHz) kody P(Y), M, L2C, Częstotliwość L5 ( MHz) kod wykorzystywany w ratownictwie. Kody P(Y) oraz M mają zastosowanie wojskowe. Kody C/A, L2C, L1C oraz L5 przeznaczone dla cywili. Kody L2C i M oraz częstotliwość L5 w satelitach wystrzelonych od 2005 roku, L2C i L5 (sygnały od kwietnia 2014), L1C planowany od 2017 rok 8
9 Głównym powodem stosowania dwóch różnych częstotliwości L1 i L2 jest możliwość redukcji błędów powodowanych refrakcją jonosferyczną oraz zwiększenie niezawodności sygnału. Opóźnienie jonosferyczne, jeśli nie zostanie uwzględnione, ma znaczący wpływ na błąd wyznaczenia pozycji, którego amplituda z tego tylko powodu może być rzędu kilkunastu metrów. Ponieważ sygnał nadawany w paśmie L2 jest używany przede wszystkim do korekcji opóźnienia jonosferycznego, jego poziom jest niższy o 6dB (1/4 mocy) w porównaniu z sygnałem nadawanym w paśmie L1. Satelity GPS nadają sygnały na różnych częstotliwościach pasma L. Ponieważ fale nośne są czystymi sinusoidami to nie mogą być bezpośrednio użyte do uzyskania pozycji i dlatego zmodulowano je dwoma kodami binarnymi (dwójkowymi: 0,1): C/A (coarse-acquisition) i P(Y) (precise, encrypted). 9
10 10
11 11
12 Częstotliwość podstawowa jest wykorzystana dla kodu P(Y) MHz, ~29.31 m, okres 267 dni, (precise, protected, a to y to od encrypted). Częstotliwość podstawowa po podzieleniu przez 10 tj MHz / 10 formuje kod C/A MHz, ~293.1 m, okres 1 ms, (coarse-acquisition, clear-acquisition). Kody C/A i P są wzajemnie obrócone w fazach o 90. obecnie C/A zmieniany na kod L2C, od 2014 roku tylko na L2, ~293.1 m (L2 Civilian) dzielony jest na dwie sekwencje CM (Civilian Moderate) o długości bitów i powtarzany co 20 ms oraz CL (Civilian Long) o długości bitów powtarzany co kod L1C - podobnie jak kod L2C (L1 Civilian) 12
13 Oba te kody generowane są binarnie w formie pseudo-losowego szumu PRN (Pseudo-Random Noise). Kod generowanym według znanego rozkładu (przez tzw. generator pseudolosowy). Sygnały pseudolosowe modulowane są impulsowo z fazą ±1 według jednego z rodziny 1032 pseudolosowych ciągów Golda (mają one szczególnie dobre właściwości autokorelacji i niskiej korelacji z innymi kodami < 70%). Każdy satelita nadaje odcinek innego ciągu losowego, co ma na celu umożliwienie identyfikacji satelity. Sekwencja odcinków ciągu przypisanych poszczególnym satelitom wybrana jest tak, aby sygnały rożnych satelitów nie były ze sobą skorelowane, a dla każdego satelity współczynnik autokorelacji miał tylko jedno maksimum. Własności te pozwalają na niezależny odbiór sygnałów z rożnych satelitów nadających w tym samym paśmie częstotliwości. Czas dojścia sygnału do odbiornika przy odległości satelity od Ziemi ok km wynosi ok. 60 ms. 13
14 Kod C/A Sygnał modulowany jest w odcinkach kodu pseudolosowego o długości 1023 bitów transmitowanych z szybkością 1023 bps. Powtarzalność odcinka kodu danego satelity wynosi więc ok. 1 ms, co pozwala na szybką synchronizacje kodu w odbiorniku z nadawanym sygnałem. Powtarzanie modulacji co 1 ms przy prędkości fali ok km/s umożliwia rozdzielczość pomiaru odległości (pozycji) ok. 300 m, przy założeniu błędu pomiaru równego odcinkowi kodu. Wykazano jednak w praktyce, możliwe jest osiągnięcie dokładności pozycji znacznie większej m. 14

15 Generator kodu pseudolosowego C/A 15
16 Kod P(Y) Dostępny jest tylko dla autoryzowanych użytkowników, nadawany jest na obu kanałach L1 i L2. Sygnał modulowany jest w odcinkach o długości jednego tygodnia, stanowiących cześć trwającej 267 dni sekwencji ciągu pseudolosowego przypisanego każdemu z satelitów. Wznowienie powtarzania odcinka ciągu następuje jednak co tydzień - w sobotę o północy. Szybkość transmisji kodu P wynosi MHz (długość jednego bita wynosi 29.3 m). Powtarzanie informacji z szybkością dziesięć razy większą niż szybkość powtarzania kodu C/A, zwiększa w przybliżeniu dziesięciokrotnie dokładność wyznaczania pozycji. Na częstotliwości L2 modulowany był tylko kod P(Y), od 2007 również C/A (L2C) i M. Kod P może być dodatkowo zaszyfrowany kodem W tzw. anti-spoofing (AS) dając w rezultacie kod Y. Jest to dodatkowym utrudnieniem dla nieautoryzowanych użytkowników chcących skorzystać z kodu P i częstotliwości L2. 16
17 Częstotliwość L5 od 2010 roku transmitowane są dwa sygnały (przesunięte wzajemnie w fazie o 90. Takie sygnały, mimo iż nadawane na tej samej częstotliwości, mogą być przez odbiornik widziane w pewnym stopniu jako odrębne i niezależne), z których jeden nie będzie modulowany danymi. Sygnał pozbawiony danych poprawia dokładność śledzenia fazy i umożliwia bardziej precyzyjne pomiary fazy nośnej. 17
18 Sygnał modulowany jest za pomocą kodu binary biphase - Bi-Phase Shift Key (BPSK) - najprostsza forma modulacji PSK, w której faza może przyjmować jedną z dwóch wartości przesuniętych względem siebie o 180 reprezentując logiczne "0" lub "1". W wyniku BPSK wartości kodów zostają bezpośrednio przemnożone przez fazę generowanej fali nośnej, co powoduje odwrócenie fazy nośnej o 180º wraz ze zmianą stanu kodu. 18
19 Zasada wytwarzania sygnałów zmodulowanych w systemie GPS 19

20 Ogólna postać równania sygnału na częstotliwości L1 w funkcji czasu Ogólna postać równania sygnału na częstotliwości L2 w funkcji czasu 20
21 Sygnał na częstotliwości L1 Formowanie sygnału satelity GPS 21
22 SA (selective availability), selektywna dostępność celowa degradacja sygnału GPS poprzez wprowadzenie poprawki do zegara i zmniejszenie dokładności efemeryd pokładowych. Zmniejszenie (5-10x) dokładności systemu GPS w wyniku wprowadzenia dwóch zakłóceń do pracy systemu zwanych: dither i epsilon. Dither SA polega na manipulacji częstotliwości zegarów satelitarnych i w rezultacie wytworzeniu bitów kodu o różnych długościach. Innymi słowami, przy włączonym SA, odległość pomiędzy bitami kodu C/A będzie zmienna i zazwyczaj różna od teoretycznych 293 m. Tymczasem tworzona w odbiorniku replika kodu zakłada długość bitu równą 293 m i na niej oparte są pomiary pseudoodległości. 22
23 Epsilon SA jest wynikiem błędów wprowadzonych do modelu orbit satelitarnych i ich danych efemerydalnych transmitowanych w wiadomości nawigacyjnej. Współrzędne położenia satelitów na orbicie są wyznaczane w odbiorniku na podstawie tych niedokładnych informacji i stąd błędy przenoszą się na wyliczaną pozycję. Typowe błędy pomiaru pseudoodległości przy włączonym SA wynoszą +/-100 m. 1 maja 2010 roku decyzja o wyłączeniu SA 23
24 Data with and without SA (Selective Availability) 24

25 Data from the first week without SA (Selective Availability) 25
26 GPS accuracy before and after SA removal 95% of points radius of 45.0 meters, without SA radius of 6.3 meters 26
27 Sygnał L1 jest modulowany zarówno kodem C/A, P oraz M (a w bloku III także L1C), w taki sposób, że kody wzajemnie ze sobą nie interferują. Jest to możliwe poprzez modulację jednego kodu zgodnie z fazą nośnej i drugiego po przesunięciu w fazie np. o 90. Na nowo instalowanych satelitach od 2007 roku na częstotliwości L2 zostały wprowadzone kody L2C i M (modulowane BOC - Binary Offset Carrier). Od 2009 roku do transmisji sygnału L5 wykorzystano dodatkową częstotliwość transmisji L5. 27
28 DEPESZA NAWIGACYJNA 28
29 Odbiorniki GPS mogą rozróżnić sygnały pochodzące z różnych satelitów każdy satelita nadaje indywidualną sekwencję kodu o określonym numerze PRN. W celu nałożenia danych binarnych na fale nośne GPS kody transferowane są z systemu 0,1 na -1,1 i modulo-2 dodawana jest do nich wiadomość nawigacyjna. 29
30 Wiadomość nawigacyjna GPS zawiera między innymi informacje o pozycjach orbitalnych satelitów (almanach), ich sprawności (health status) oraz handover-word. Każdy satelita przesyła pełny zestaw danych opisujących własną orbitę i czas (w ephemeris information) oraz przybliżone informacje o orbitach pozostałych satelitów (w almanac information). Dane modulowane są z prędkością 50 b/s, transmisja całej wiadomości trwa 12,5 minuty. Aby skrócić czas uzyskania pozycji dane efemerydalne i zegara powtarzane są co 30 sekund. W wiadomości nawigacyjnej zamieszczane są także parametry opisujące opóźnienie jonosferyczne sygnału GPS. 30
31 Depesza nawigacyjna - zawiera informację o układzie satelitów na niebie (tzw. almanach), informację o ich teoretycznej drodze oraz odchyleń od niej (tzw. efemeryda), a także dane o stanie satelitów, aktualne współczynniki do obliczenia opóźnienia jonosferycznego i dane do obliczenia czasu UTC. Oba sygnały GPS L1 i L2 są modulowane nie tylko kodami pseudolosowymi (PRN), ale również ciągłym strumieniem danych nawigacyjnych, zawierającym właśnie depeszę nawigacyjną. Dwa binarne sygnały modulujące fale nośne L1 i L2 są wytwarzane jako suma modulo 2 ciągu bitów depeszy nawigacyjnej i ciągu bitów odpowiedniego kodu pseudolosowego C/A lub P(Y). Depesza jest formowana z danych przesyłanych do satelity z naziemnego segmentu kontrolnego systemu NAVSTAR-GPS i jest nadawana z satelity z szybkością 50 Bd (50 Hz). Dane zawarte w depeszy nawigacyjnej są niezbędne do wyznaczenia w odbiorniku GPS położenia, prędkości i czasu. Bity danych o czasie trwania 20 ms są logicznie pogrupowane w słowa, podramki (ang. subframes), ramki (ang. frames) i superramki (ang. superframes). Format depeszy nawigacyjnej, z zaznaczeniem czasu trwania i liczby bitów w poszczególnych elementach struktury na rysunku. 31
32 Format depeszy nawigacyjnej 32
33 Zawartość depeszy nawigacyjnej 33
34 Pełna depesza nawigacyjna jest zawarta w superramce, złożonej z bitów, której transmisja trwa 12,5 minuty. Superramka składa się z 25 ramek o czasie trwania 30 sekund, złożonych z 1500 bitów każda. W skład ramki wchodzi pięć 300 bitowych podramek, złożonych z 10 słów 30 bitowych. Czas trwania pojedynczej podramki wynosi 6 sekund. Słowa wchodzące w skład podramek są transmitowane w czasie 0,6 sekundy od najstarszego bitu (MSB) do najmłodszego (LSB). W skład każdej podramki wchodzą dwa szczególnie ważne słowa TLM (ang. Telemetry) i HOW (ang. Hand Over Word). Słowo telemetryczne TLM rozpoczyna się 8 bitową preambułą ( ), która jest używana przez odbiorniki GPS do odnalezienia początku podramki. Słowo HOW pozwala natomiast wyznaczyć czas nadania kolejnej podramki i służy odbiornikom wojskowym z kodem P(Y) do przejścia od śledzenia cywilnego kodu C/A do śledzenia kodu wojskowego P(Y). Pozostałe 8 słów każdej podramki stanowią dane nawigacyjne. 34

35 Pomijając okresowa aktualizację podramki 1, 2 i 3 powtarzają się w każdej ramce, natomiast podramki 4 i 5 mają 25 różnych wersji nazywanych stronami. W kolejnych ramkach jest transmitowana jedna z 25 stron podramki 4 i 5, zatem przesłanie kompletu danych wymaga nadania 25 ramek, czyli jednej superramki. Zawartość poszczególnych podramek depeszy nawigacyjnej poniżej w tabeli. 35
36 Zawartość efemerydalnej części depeszy: M 0 - anomalia średnia, n- przyrost ruchu średniego, e - mimośród orbity, a - pierwiastek z dużej półosi orbity, Ω 0 rektascenzja węzła wstępującego, i 0 - nachylenie orbity, ω 0 - argument perigeum,. Ω - pochodna rektascenzji względem czasu,. i - pochodna nachylenia, C uc, C us - wyrazy poprawkowe do argumentu szerokości, C rc, C rs - wyrazy poprawkowe do promienia orbity, C ic, C is - wyrazy poprawkowe do inklinacji, t 0 - epoka efemerydy. 36
37 Odbiór informacji zawartej w pojedynczej ramce, a w zasadzie w jej trzech pierwszych podramkach, jest wystarczający do wyznaczenia położenia użytkownika GPS. Teoretycznie oznacza to, że minimalny czas od uruchomienia odbiornika do wyznaczenia położenia wynosi 18 sekund (3 razy czas trwania podramki). W praktyce włączenie odbiornika może nastąpić w dowolnym momencie trwania ramki, np. na początku czwartej podramki, zatem gwarantowany czas otrzymania pierwszych trzech podramek wynosi 30 sekund i taki można przyjąć minimalny czas od uruchomienia odbiornika do pierwszego ustalenia położenia TTFF (ang. Time To First Fix). TTFF jest ważnym parametrem odbiornika GPS, określającym jak szybko urządzenie jest gotowe do pracy. Czas ten jest oczywiście zależny od widoczności satelitów, od budowy i oprogramowania odbiornika oraz od czasu, który upłynął od jego ostatniego wyłączenia i tym samym od stopnia aktualności danych zgromadzonych w pamięci odbiornika. Jeśli przerwa w pracy była krótka, większość danych nawigacyjnych przechowywanych w pamięci odbiornika GPS pozostaje aktualna i położenie jest ustalane znacznie szybciej, zwykle w ciągu pojedynczych sekund. Z drugiej strony, jeśli odbiornik nie był włączany przez wiele dni, lub został przetransportowany w stanie wyłączonym na bardzo dużą odległość, poszukiwanie satelitów, a następnie odbiór i zdekodowanie ich sygnałów może zająć nawet kilka minut. 37
38 W takiej sytuacji odbiornik powinien też pozostać włączony przez czas gwarantujący odbiór całej superramki, co przyspieszy jego uruchamianie przy kolejnych włączeniach. Producenci odbiorników GPS zwykle podają średni czas reakwizycji sygnału po chwilowej utracie jego śledzenia, np. w wyniku krótkotrwałego przesłonięcia anteny odbiornika lub krótkiej przerwy w jego zasilaniu, a także średnie czasy TTFF dla różnych przypadków aktualności położenia użytkownika, czasu zegara odbiornika GPS oraz efemerydów i almanachu przechowywanych w pamięci odbiornika. Podawane w danych technicznych odbiorników GPS czasy TTFF są określane następująco: czas gorącego startu (ang. hot start), określany dla przypadku, gdy efemerydy zgromadzone i zapisane w pamięci odbiornika GPS podczas ostatniego okresu pracy są nadal aktualne oraz odbiornik jest zsynchronizowany z czasem GPS, czas ciepłego startu (ang. warm start), określany dla przypadku, gdy odbiornik utracił synchronizację z czasem GPS, ale znane jest przybliżone położenie i czas, oraz gdy efemerydy zgromadzone w pamięci odbiornika utraciły już swoją ważność, co następuje po około 4 godzinach, ale mogą być wciąż użyteczne przy obliczaniu położenia satelitów, 38
39 czas zimnego startu (ang. cold start), kiedy znane jest przybliżone położenie i czas, w pamięci odbiornika jest zapisany aktualny almanach, natomiast efemerydy nie są zapisane lub są całkowicie nieaktualne, czas przeszukiwania nieba (ang. search the sky), określany przy całkowitym braku danych o położeniu odbiornika, czasie i danych orbitalnych, np. w przypadku pierwszego uruchomienia zakupionego odbiornika GPS. Średni czas reakwizycji wynosi typowo od dziesiątych części sekundy do pojedynczych sekund. Czas gorącego startu wynosi zwykle kilkanaście sekund, ciepłego startu kilkadziesiąt sekund, zimnego startu od kilkudziesięciu do stu kilkudziesięciu sekund, zaś czas przeszukiwania nieba może wynosić nawet kilka minut. 39
40 ZASADA DZIAŁANIA ODBIORNIKA GPS 40
41 Odbiornik GPS wykrywa i następnie konwertuje sygnały otrzymane z satelitów na pomiary parametrów linii pozycyjnych. 41
42 Antena jednoczęstotliwościowego odbiornika GPS jest anteną bezkierunkową o wzmocnieniu 3 db z dodaną przeciwwagą (stalową tarczą w podstawie anteny) tak, aby 50% docierających sygnałów było ignorowanych (tych pochodzących z poniżej horyzontu lub podstawy anteny). Antena jest połączona z odbiornikiem przy pomocy koncentrycznego kabla, którym płynie także zasilanie do antenowego przedwzmacniacza. Przedwzmacniacz zwiększa moc wykrytego sygnału i następnie przesyła go do odbiornika. 42
 wyodrębniając sygnał radiowy (RF).")
43 W odbiorniku GPS sygnał najpierw trafia do układu filtrującego, który odrzuca wszystkie składowe spoza pasma L1 (przeważnie będzie to filtr o częstotliwości środkowej MHz i szerokości pasma 20 MHz) wyodrębniając sygnał radiowy (RF). Sygnał ulega następnie zmieszaniu z sinusoidą generowaną przez oscylator lokalny dając w rezultacie częstotliwość pośrednią równą około 40 khz (układ oscylatora lokalnego i mieszacza). Sygnał na częstotliwości pośredniej (IF) po ponownym przefiltrowaniu jest następnie demodulowany na prostokątny sygnał cyfrowy (układ korelatora kodu i demodulatora wiadomości nawigacyjnej). 43
44 Układ korelatora kodu (code correlator) składa się z kolejnego mieszacza i oscylatora cyfrowego. Aby zdemodulować sygnał IF w układzie mieszacza sprowadza się go do częstotliwości zerowej i jego kopie przesyła się na poszczególne kanały, w których wyodrębniany jest kod i informacja o nośnej dla kolejnych satelitów (realizacja CDMA). W tym celu w oscylatorze cyfrowym NCO (numerically controlled oscillator) jest tworzona replika kodu C/A lub P danego satelity i porównywana z sygnałem IF. Proces korelacji (porównania) prowadzi do wzmocnienia sygnału powyżej progu szumów, czyli do jego demodulacji na sygnał dwupoziomowy (0,1). 44
45 Pseudoodległość (PR, pseudorange) zostaje wyznaczona w wyniku zmierzenia przesunięcia czasowego potrzebnego na wyrównanie sygnału wygenerowanego przez NCO z sygnałem IF i przemnożeniu uzyskanej wartości przez prędkość fali elektromagnetycznej. 45
46 W praktyce stosowane są trzy repliki kodu dla celów korelacji jedna wyrównywana dokładnie z sygnałem IF (punctual), jedna opóźniona (late) i jedna przyśpieszona (early). Kody late i early położone są po i przed ekstremum funkcji korelacyjnej po to, aby umożliwić ciągłość synchronizacji kodu (continuous tracking) i żeby zmniejszyć jej błędy. 46

47 LITERATURA K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie, Warszawa B. Hofmann-Wellenhof, H. Lichtenegger, E. Wasl, GNSS Global Navigation Satellite Systems GPS, GLONASS, Galileo and more, Springer, Wien - New York D. Dardari, M. Luise, E. Falletti, Satellite and Terrestrial Radio Positioning Techniques: A Signal Processing, Elsevier, P. Kaniewski, System nawigacji satelitarnej GPS, części: 1 12, Elektronika praktyczna, 2/2006-1/ [dostęp: ] P. Zalewski, Systemy satelitarne wykorzystywane w nawigacji, wigacji.pdf [dostęp: ] P. Zalewski, GNSS GPS, [dostęp: ] P. Zalewski, Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS [dostęp: ] J. Januszewski, Nowe depesze nawigacyjne systemu satelitarnego gps oraz budowanych systemów Galileo i qzss, Wiadomości Telekomunikacyjne nr 10/ z_budowanych_systemow_galileo_i_qzss.pdf [dostęp: ] [dostęp: ] 47
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
Przeznaczenie, architektura, sygnały i serwisy satelitarnego systemu GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie Przeznaczenie i zastosowania GPS: Pełna nazwa systemu to NAVSTAR GPS od
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów
 System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
System nawigacji satelitarnej GPS, część 2 Budowa systemu i struktura sygnałów Osoby, które choćby przez chwilę korzystały z typowego nawigacyjnego odbiornika GPS wiedzą, że posługiwanie się nim jest bardzo
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GPS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Globalny Nawigacyjny System Satelitarny GPS dr inż. Paweł Zalewski Wprowadzenie GPS jest nawigacyjnym systemem satelitarnym zaprojektowanym w celu dostarczenia bieżącej informacji o pozycji, prędkości
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Zagadnienia: stotliwości. Sygnały y na E5. - Modulacje sygnałów w i ich charakterystyka. - Budowa depeszy nawigacyjnej
 Zagadnienia: Założone one częstotliwo stotliwości Przegląd d sygnałów w systemu Sygnały y na L1 Sygnały y na E6 Sygnały y na E5 - Modulacje sygnałów w i ich charakterystyka - Budowa depeszy nawigacyjnej
Zagadnienia: Założone one częstotliwo stotliwości Przegląd d sygnałów w systemu Sygnały y na L1 Sygnały y na E6 Sygnały y na E5 - Modulacje sygnałów w i ich charakterystyka - Budowa depeszy nawigacyjnej
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Demodulator FM. o~ ~ I I I I I~ V
 Zadaniem demodulatora FM jest wytworzenie sygnału wyjściowego, który będzie proporcjonalny do chwilowej wartości częstotliwości sygnału zmodulowanego częstotliwościowo. Na rysunku 12.13b przedstawiono
Zadaniem demodulatora FM jest wytworzenie sygnału wyjściowego, który będzie proporcjonalny do chwilowej wartości częstotliwości sygnału zmodulowanego częstotliwościowo. Na rysunku 12.13b przedstawiono
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Islam S. K., Haider M. R.: Sensor and low power signal processing, Springer 2010 http://en.wikipedia.org/wiki/modulation
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Islam S. K., Haider M. R.: Sensor and low power signal processing, Springer 2010 http://en.wikipedia.org/wiki/modulation
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:") PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS. Acta Scientifica Academiae Ostroviensis nr 30, 19-32
 Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
WYBRANE ELEMENTY GEOFIZYKI
 WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
WYBRANE ELEMENTY GEOFIZYKI Ćwiczenie 3: Wyznaczanie współczynników TEC (Total Electron Content) i ZTD (Zenith Total Delay) z obserwacji GNSS. prof. dr hab. inż. Janusz Bogusz Zakład Geodezji Satelitarnej
Wyposażenie Samolotu
 P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
P O L I T E C H N I K A R Z E S Z O W S K A im. Ignacego Łukasiewicza Wydział Budowy Maszyn i Lotnictwa Katedra Awioniki i Sterowania Wyposażenie Samolotu Instrukcja do laboratorium nr 3 Lotniczy odbiornik
Wpływ szumu na kluczowanie fazy (BPSK)
") Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.9 Wpływ szumu na kluczowanie fazy () . Wpływ szumu na kluczowanie fazy () Ćwiczenie ma na celu wyjaśnienie wpływu
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.9 Wpływ szumu na kluczowanie fazy () . Wpływ szumu na kluczowanie fazy () Ćwiczenie ma na celu wyjaśnienie wpływu
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Politechnika Warszawska
 Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.03 Podstawowe zasady modulacji amlitudy na przykładzie modulacji DSB 1. Podstawowe zasady modulacji amplitudy
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.03 Podstawowe zasady modulacji amlitudy na przykładzie modulacji DSB 1. Podstawowe zasady modulacji amplitudy
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 8 1 J. Lamparski, Navstar GPS: od teorii do praktyki, Wyd. UW-M, Olsztyn 2001. K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice
Przyswojenie wiedzy na temat serwisów systemu GPS i charakterystyk z nimi związanych
 C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
C C2 C C C5 C6 C7 C8 C9 C0 C C2 C C C5 C6 C7 C8 C9 I. KARTA PRZEDMIOTU. Nazwa przedmiotu: SATELITARNE SYSTEMY NAWIGACYJNE 2. Kod przedmiotu: Vd. Jednostka prowadząca: Wydział Nawigacji i Uzbrojenia Okrętowego.
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
2. STRUKTURA RADIOFONICZNYCH SYGNAŁÓW CYFROWYCH
 1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
1. WSTĘP Radiofonię cyfrową cechują strumienie danych o dużych przepływnościach danych. Do przesyłania strumienia danych o dużych przepływnościach stosuje się transmisję z wykorzystaniem wielu sygnałów
Politechnika Warszawska
 Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.08 Zasady wytwarzania sygnałów zmodulowanych za pomocą modulacji AM 1. Zasady wytwarzania sygnałów zmodulowanych
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.08 Zasady wytwarzania sygnałów zmodulowanych za pomocą modulacji AM 1. Zasady wytwarzania sygnałów zmodulowanych
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego
 102 10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
102 10. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
Niezawodność i diagnostyka systemów cyfrowych projekt 2015
 Niezawodność i diagnostyka systemów cyfrowych projekt 2015 Jacek Jarnicki jacek.jarnicki@pwr.edu.pl Zajęcia wprowadzające 1. Cel zajęć projektowych 2. Etapy realizacji projektu 3. Tematy zadań do rozwiązania
Niezawodność i diagnostyka systemów cyfrowych projekt 2015 Jacek Jarnicki jacek.jarnicki@pwr.edu.pl Zajęcia wprowadzające 1. Cel zajęć projektowych 2. Etapy realizacji projektu 3. Tematy zadań do rozwiązania
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
POLITECHNIKA POZNAŃSKA
 POLITECHNIKA POZNAŃSKA INSTYTUT ELEKTROTECHNIKI I ELEKTRONIKI PRZEMYSŁOWEJ Zakład Elektrotechniki Teoretycznej i Stosowanej Laboratorium Podstaw Telekomunikacji Ćwiczenie nr 4 Temat: Modulacje analogowe
POLITECHNIKA POZNAŃSKA INSTYTUT ELEKTROTECHNIKI I ELEKTRONIKI PRZEMYSŁOWEJ Zakład Elektrotechniki Teoretycznej i Stosowanej Laboratorium Podstaw Telekomunikacji Ćwiczenie nr 4 Temat: Modulacje analogowe
ZAKŁAD SYSTEMÓW ELEKTRONICZNYCH I TELEKOMUNIKACYJNYCH Laboratorium Podstaw Telekomunikacji WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ
 Laboratorium Podstaw Telekomunikacji Ćw. 4 WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ 1. Zapoznać się z zestawem do demonstracji wpływu zakłóceń na transmisję sygnałów cyfrowych. 2. Przy użyciu oscyloskopu cyfrowego
Laboratorium Podstaw Telekomunikacji Ćw. 4 WPŁYW SZUMÓW NA TRANSMISJĘ CYFROWĄ 1. Zapoznać się z zestawem do demonstracji wpływu zakłóceń na transmisję sygnałów cyfrowych. 2. Przy użyciu oscyloskopu cyfrowego
Podstawy transmisji sygnałów
 Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Podstawy transmisji sygnałów 1 Sygnał elektromagnetyczny Jest funkcją czasu Może być również wyrażony jako funkcja częstotliwości Sygnał składa się ze składowych o róznych częstotliwościach 2 Koncepcja
Krzysztof Włostowski pok. 467 tel
 Systemy z widmem rozproszonym ( (Spread Spectrum) Krzysztof Włostowski e-mail: chrisk@tele tele.pw.edu.pl pok. 467 tel. 234 7896 1 Systemy SS - Spread Spectrum (z widmem rozproszonym) CDMA Code Division
Systemy z widmem rozproszonym ( (Spread Spectrum) Krzysztof Włostowski e-mail: chrisk@tele tele.pw.edu.pl pok. 467 tel. 234 7896 1 Systemy SS - Spread Spectrum (z widmem rozproszonym) CDMA Code Division
LABORATORIUM PODSTAW TELEKOMUNIKACJI
 WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego w Warszawie Wydział Elektroniki LABORATORIUM PODSTAW TELEKOMUNIKACJI Grupa Podgrupa Data wykonania ćwiczenia Ćwiczenie prowadził... Skład podgrupy:
WOJSKOWA AKADEMIA TECHNICZNA im. Jarosława Dąbrowskiego w Warszawie Wydział Elektroniki LABORATORIUM PODSTAW TELEKOMUNIKACJI Grupa Podgrupa Data wykonania ćwiczenia Ćwiczenie prowadził... Skład podgrupy:
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Global Positioning System (GPS)
") Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Global Positioning System (GPS) Ograniczenia dokładności odbiorników systemu GPS Satellite GPS Antenna Hard Surface 1 Błędy pozycji Niezależne od zasady działania systemu Metodyczne wynikające z zasady
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 7
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Modulacja amplitudy. Numer ćwiczenia: 7 Laboratorium
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Modulacja amplitudy. Numer ćwiczenia: 7 Laboratorium
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
TEMAT: SYSTEMY CYFROWE: MODULACJA DEMODULACJA FSK, PSK, ASK
 SYSTEMY TELEINFORMATYCZNE INSTRUKCJA DO ĆWICZENIA NR 7 LAB 7 TEMAT: SYSTEMY CYFROWE: MODULACJA DEMODULACJA FSK, PSK, ASK SYSTEMY TELEINFORMATYCZNE I. CEL ĆWICZENIA: Celem ćwiczenia jest zapoznanie się
SYSTEMY TELEINFORMATYCZNE INSTRUKCJA DO ĆWICZENIA NR 7 LAB 7 TEMAT: SYSTEMY CYFROWE: MODULACJA DEMODULACJA FSK, PSK, ASK SYSTEMY TELEINFORMATYCZNE I. CEL ĆWICZENIA: Celem ćwiczenia jest zapoznanie się
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Systemy i Sieci Radiowe Wykład 4 Media transmisyjne część Program wykładu Widmo sygnałów w. cz. Modele i tryby propagacji Anteny Charakterystyka kanału radiowego zjawiska propagacyjne 1 Transmisja radiowa
Przebieg sygnału w czasie Y(fL
 12.3. y y to układy elektroniczne, które przetwarzają energię źródła przebiegu stałego na energię przebiegu zmiennego wyjściowego (impulsowego lub okresowego). W zależności od kształtu wytwarzanego przebiegu
12.3. y y to układy elektroniczne, które przetwarzają energię źródła przebiegu stałego na energię przebiegu zmiennego wyjściowego (impulsowego lub okresowego). W zależności od kształtu wytwarzanego przebiegu
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 5
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa. Numer ćwiczenia: 5 Laboratorium
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa. Numer ćwiczenia: 5 Laboratorium
Systemy i Sieci Telekomunikacyjne laboratorium. Modulacja amplitudy
 Systemy i Sieci Telekomunikacyjne laboratorium Modulacja amplitudy 1. Cel ćwiczenia: Celem części podstawowej ćwiczenia jest zbudowanie w środowisku GnuRadio kompletnego, funkcjonalnego odbiornika AM.
Systemy i Sieci Telekomunikacyjne laboratorium Modulacja amplitudy 1. Cel ćwiczenia: Celem części podstawowej ćwiczenia jest zbudowanie w środowisku GnuRadio kompletnego, funkcjonalnego odbiornika AM.
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Zasada pracy różnicowego GPS - DGPS. dr inż. Paweł Zalewski
 Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Zasada pracy różnicowego GPS - DGPS dr inż. Paweł Zalewski Sformułowanie problemu W systemie GPS wykorzystywane są sygnały pomiaru czasu (timing signals) przynajmniej z trzech satelitów w celu ustalenia
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska
 Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Frank Karlsen, Nordic VLSI, Zalecenia projektowe dla tanich systemów, bezprzewodowej transmisji danych cyfrowych, EP
Zygmunt Kubiak Instytut Informatyki Politechnika Poznańska Opracowanie na postawie: Frank Karlsen, Nordic VLSI, Zalecenia projektowe dla tanich systemów, bezprzewodowej transmisji danych cyfrowych, EP
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego
 94 12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
94 12. Demodulatory synchroniczne z fazową pętlą sprzężenia zwrotnego Cele ćwiczenia Badanie właściwości pętli fazowej. Badanie układu Costasa do odtwarzania nośnej sygnału AM-SC. Badanie układu Costasa
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP
 Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Warszawa, 12.05.2016 r. gen. bryg. rez. pilot Dariusz WROŃSKI Innowacje wzmacniające system ochrony i bezpieczeństwa granic RP Zastosowanie głowic rodziny WH Obserwacja obiektów statycznych i dynamicznych
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
Modulacja i kodowanie - labolatorium. Modulacje cyfrowe. Kluczowane częstotliwości (FSK)
") Modulacja i kodowanie - labolatorium Modulacje cyfrowe Kluczowane częstotliwości (FSK) Celem ćwiczenia jest zbudowanie systemu modulacji: modulacji polegającej na kluczowaniu częstotliwości (FSK Frequency
Modulacja i kodowanie - labolatorium Modulacje cyfrowe Kluczowane częstotliwości (FSK) Celem ćwiczenia jest zbudowanie systemu modulacji: modulacji polegającej na kluczowaniu częstotliwości (FSK Frequency
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki
 Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.09 Określenie procentu modulacji sygnału zmodulowanego AM 1. Określenie procentu modulacji sygnału zmodulowanego
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.09 Określenie procentu modulacji sygnału zmodulowanego AM 1. Określenie procentu modulacji sygnału zmodulowanego
Systemy i Sieci Radiowe
 Systemy i Sieci Radiowe Wykład 2 Wprowadzenie część 2 Treść wykładu modulacje cyfrowe kodowanie głosu i video sieci - wiadomości ogólne podstawowe techniki komutacyjne 1 Schemat blokowy Źródło informacji
Systemy i Sieci Radiowe Wykład 2 Wprowadzenie część 2 Treść wykładu modulacje cyfrowe kodowanie głosu i video sieci - wiadomości ogólne podstawowe techniki komutacyjne 1 Schemat blokowy Źródło informacji
PL B1. Sposób i układ do modyfikacji widma sygnału ultraszerokopasmowego radia impulsowego. POLITECHNIKA GDAŃSKA, Gdańsk, PL
 PL 219313 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219313 (13) B1 (21) Numer zgłoszenia: 391153 (51) Int.Cl. H04B 7/00 (2006.01) H04B 7/005 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
PL 219313 B1 RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 219313 (13) B1 (21) Numer zgłoszenia: 391153 (51) Int.Cl. H04B 7/00 (2006.01) H04B 7/005 (2006.01) Urząd Patentowy Rzeczypospolitej Polskiej
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
celowym rozpraszaniem widma (ang: Spread Spectrum System) (częstotliwościowe, czasowe, kodowe)
 (częstotliwościowe, czasowe, kodowe)") 1. Deinicja systemu szerokopasmowego z celowym rozpraszaniem widma (ang: Spread Spectrum System) 2. Ogólne schematy nadajników i odbiorników 3. Najważniejsze modulacje (DS, FH, TH) 4. Najważniejsze własności
1. Deinicja systemu szerokopasmowego z celowym rozpraszaniem widma (ang: Spread Spectrum System) 2. Ogólne schematy nadajników i odbiorników 3. Najważniejsze modulacje (DS, FH, TH) 4. Najważniejsze własności
Ograniczenia GPS. błędy spowodowane zmiennością opóźnień: jonosferycznego i troposferycznego, niedokładności efemeryd, błędy zegara satelity,
 DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
DGPS 1 Ograniczenia GPS Wiele ograniczeń występujących przy stosowaniu odbiorników GPS usuniętych może być poprzez wykonywanie pomiarów metodami różnicowymi. Ich realizacja może polegać na: wprowadzaniu
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Kartografia - wykład
 prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
Politechnika Warszawska
 Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.10 Odbiór sygnałów AM odpowiedź częstotliwościowa stopnia 1. Odbiór sygnałów AM odpowiedź częstotliwościowa stopnia
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.10 Odbiór sygnałów AM odpowiedź częstotliwościowa stopnia 1. Odbiór sygnałów AM odpowiedź częstotliwościowa stopnia
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015
 Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
Metody numeryczne Technika obliczeniowa i symulacyjna Sem. 2, EiT, 2014/2015 1 Metody numeryczne Dział matematyki Metody rozwiązywania problemów matematycznych za pomocą operacji na liczbach. Otrzymywane
2010-04-12. Magistrala LIN
 Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Magistrala LIN Protokoły sieciowe stosowane w pojazdach 2010-04-12 Dlaczego LIN? 2010-04-12 Magistrala LIN(Local Interconnect Network) została stworzona w celu zastąpienia magistrali CAN w przypadku, gdy
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
MODULACJA. Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji. dr inż. Janusz Dudczyk
 Wyższa Szkoła Informatyki Stosowanej i Zarządzania MODULACJA Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji dr inż. Janusz Dudczyk Cel wykładu Przedstawienie podstawowych
Wyższa Szkoła Informatyki Stosowanej i Zarządzania MODULACJA Definicje podstawowe, cel i przyczyny stosowania modulacji, rodzaje modulacji dr inż. Janusz Dudczyk Cel wykładu Przedstawienie podstawowych
f = 2 śr MODULACJE
 5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
5. MODULACJE 5.1. Wstęp Modulacja polega na odzwierciedleniu przebiegu sygnału oryginalnego przez zmianę jednego z parametrów fali nośnej. Przyczyny stosowania modulacji: 1. Umożliwienie wydajnego wypromieniowania
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ. Instrukcja do zajęć laboratoryjnych. Numer ćwiczenia: 11
 Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa kluczowanie amplitudy. Numer
Politechnika Białostocka WYDZIAŁ ELEKTRYCZNY KATEDRA TELEKOMUNIKACJI I APARATURY ELEKTRONICZNEJ Instrukcja do zajęć laboratoryjnych Temat ćwiczenia: Cyfrowa transmisja pasmowa kluczowanie amplitudy. Numer
Podstawy Geomatyki. Wykład III Systemy GNSS
 Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
Systemy satelitarne Paweł Kułakowski
 Systemy satelitarne Paweł Kułakowski Kwestie organizacyjne Prowadzący wykłady: Paweł Kułakowski D5 pokój 122, telefon: 617 39 67 e-mail: kulakowski@kt.agh.edu.pl Wykłady: czwartki godz. 12:30 14:00 Laboratorium
Systemy satelitarne Paweł Kułakowski Kwestie organizacyjne Prowadzący wykłady: Paweł Kułakowski D5 pokój 122, telefon: 617 39 67 e-mail: kulakowski@kt.agh.edu.pl Wykłady: czwartki godz. 12:30 14:00 Laboratorium
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Wyznaczanie prędkości dźwięku w powietrzu
 Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Imię i Nazwisko... Wyznaczanie prędkości dźwięku w powietrzu Opracowanie: Piotr Wróbel 1. Cel ćwiczenia. Celem ćwiczenia jest wyznaczenie prędkości dźwięku w powietrzu, metodą różnicy czasu przelotu. Drgania
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
Lekcja 20. Temat: Detektory.
 Lekcja 20 Temat: Detektory. Modulacja amplitudy. (AM z ang. Amplitude Modulation) jeden z trzech podstawowych rodzajów modulacji, polegający na kodowaniu sygnału informacyjnego (szerokopasmowego o małej
Lekcja 20 Temat: Detektory. Modulacja amplitudy. (AM z ang. Amplitude Modulation) jeden z trzech podstawowych rodzajów modulacji, polegający na kodowaniu sygnału informacyjnego (szerokopasmowego o małej
WYBRANE PRZYKŁADY ZASTOSOWAŃ SYSTEMU NAWIGACJI GPS SELECTED APPLICATION OF GPS NAVIGATION SYSTEM
 KONRAD NERING WYBRANE PRZYKŁADY ZASTOSOWAŃ SYSTEMU NAWIGACJI GPS SELECTED APPLICATION OF GPS NAVIGATION SYSTEM Streszczenie Abstract System nawigacji satelitarnej GPS staje się coraz bardziej powszechny.
KONRAD NERING WYBRANE PRZYKŁADY ZASTOSOWAŃ SYSTEMU NAWIGACJI GPS SELECTED APPLICATION OF GPS NAVIGATION SYSTEM Streszczenie Abstract System nawigacji satelitarnej GPS staje się coraz bardziej powszechny.
Sposoby opisu i modelowania zakłóceń kanałowych
 INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI Instrukcja laboratoryjna z przedmiotu Podstawy Telekomunikacji Sposoby opisu i modelowania zakłóceń kanałowych Warszawa 2010r. 1. Cel ćwiczeń: Celem ćwiczeń
INSTYTUT TELEKOMUNIKACJI ZAKŁAD RADIOKOMUNIKACJI Instrukcja laboratoryjna z przedmiotu Podstawy Telekomunikacji Sposoby opisu i modelowania zakłóceń kanałowych Warszawa 2010r. 1. Cel ćwiczeń: Celem ćwiczeń
Systemy Bezprzewodowe. Paweł Kułakowski
 Systemy Bezprzewodowe Paweł Kułakowski Tematyka kursu - lata komunikacji bezprzewodowej Gwałtowny rozwój sieci bezprzewodowych w ostatnich latach: rozwój urządzeń (smartfony, tablety, laptopy) i aplikacji
Systemy Bezprzewodowe Paweł Kułakowski Tematyka kursu - lata komunikacji bezprzewodowej Gwałtowny rozwój sieci bezprzewodowych w ostatnich latach: rozwój urządzeń (smartfony, tablety, laptopy) i aplikacji
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe
 Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
Przetworniki cyfrowo analogowe oraz analogowo - cyfrowe Przetworniki cyfrowo / analogowe W cyfrowych systemach pomiarowych często zachodzi konieczność zmiany sygnału cyfrowego na analogowy, np. w celu
LABORATORIUM ELEKTROTECHNIKI POMIAR PRZESUNIĘCIA FAZOWEGO
 POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
POLITECHNIKA ŚLĄSKA WYDZIAŁ TRANSPORTU KATEDRA LOGISTYKI I TRANSPORTU PRZEMYSŁOWEGO NR 1 POMIAR PRZESUNIĘCIA FAZOWEGO Katowice, październik 5r. CEL ĆWICZENIA Poznanie zjawiska przesunięcia fazowego. ZESTAW
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Skale czasu. 1.1 Dokładność czasu T IE - Time Interval Error
 Skale czasu 1 Dokładność i stabilność zegarów Zegar wytwarza sygnał okresowy (częstotliwościowy), który opisać można prostą funkcją harmoniczną: s(t) = A sin(2πν nom + φ 0 ) (1) ν nom = 9192631770Hz jest
Skale czasu 1 Dokładność i stabilność zegarów Zegar wytwarza sygnał okresowy (częstotliwościowy), który opisać można prostą funkcją harmoniczną: s(t) = A sin(2πν nom + φ 0 ) (1) ν nom = 9192631770Hz jest
Wpływ szumu na kluczowanie częstotliwości
 Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.15 Wpływ szumu na kluczowanie częstotliwości 15. Wpływ szumu na kluczowanie częstotliwości Ćwiczenie to ma na
Politechnika Warszawska Wydział Elektryczny Laboratorium Teletechniki Skrypt do ćwiczenia T.15 Wpływ szumu na kluczowanie częstotliwości 15. Wpływ szumu na kluczowanie częstotliwości Ćwiczenie to ma na
RADIOMETR MIKROFALOWY. RADIOMETR MIKROFALOWY (wybrane zagadnienia) Opracowanie : dr inż. Waldemar Susek dr inż. Adam Konrad Rutkowski
 Opracowanie : dr inż. Waldemar Susek dr inż. Adam Konrad Rutkowski") RADIOMETR MIKROFALOWY RADIOMETR MIKROFALOWY (wybrane zagadnienia) Opracowanie : dr inż. Waldemar Susek dr inż. Adam Konrad Rutkowski 1 RADIOMETR MIKROFALOWY Wprowadzenie Wszystkie ciała o temperaturze
RADIOMETR MIKROFALOWY RADIOMETR MIKROFALOWY (wybrane zagadnienia) Opracowanie : dr inż. Waldemar Susek dr inż. Adam Konrad Rutkowski 1 RADIOMETR MIKROFALOWY Wprowadzenie Wszystkie ciała o temperaturze
WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP
 SZTAB GENERALNY WP ZARZĄD KIEROWANIA I DOWODZENIA P6 WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP ppłk rez. Włodzimierz Głogowski WGlogowski@mon.gov.pl Oddział Identyfikacji
SZTAB GENERALNY WP ZARZĄD KIEROWANIA I DOWODZENIA P6 WYKORZYSTANIE I KIERUNKI ROZWOJU WOJSKOWEJ NAWIGACJI SATELITARNEJ W SZ RP ppłk rez. Włodzimierz Głogowski WGlogowski@mon.gov.pl Oddział Identyfikacji
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA
 Układ graficzny CKE 2016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Wykonywanie
Układ graficzny CKE 2016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Wykonywanie