GEOMATYKA program rozszerzony
|
|
|
- Łukasz Orłowski
- 7 lat temu
- Przeglądów:
Transkrypt



1 GEOMATYKA program rozszerzony dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
2 1. Układ wysokości tworzą wartości geopotencjalne podzielone przez przeciętne wartości przyspieszenia normalnego siły ciężkości, zwane dalej "wysokościami normalnymi", odniesione do średniego poziomu Morza Bałtyckiego w Zatoce Fińskiej, wyznaczonego dla mareografu w Kronsztadzie koło Sankt Petersburga (Federacja Rosyjska). 2. Wysokości normalne określa się z pomiarów geodezyjnych nawiązanych do punktów podstawowej osnowy geodezyjnej kraju.
3 3. Państwowy system odniesień przestrzennych tworzą: 1) geodezyjny układ odniesienia, określony w załączniku nr 1 do rozporządzenia, 2) układ wysokości, w którym wyznacza się wysokości punktów względem przyjętego poziomu powierzchni odniesienia, stosowany w pracach geodezyjnych i kartograficznych, 3) układ współrzędnych płaskich prostokątnych, oznaczony symbolem "2000", stosowany w pracach geodezyjnych i kartograficznych, związanych z wykonywaniem mapy zasadniczej, 4) układ współrzędnych płaskich prostokątnych, oznaczony symbolem "1992", stosowany w mapach urzędowych o skali mapy 1: i skalach mniejszych. 4. Układ współrzędnych płaskich prostokątnych, oznaczony symbolem "1965", oraz lokalne układy współrzędnych mogą być stosowane do dnia 31 grudnia 2009 r.
4 1. Układ współrzędnych płaskich prostokątnych "2000" jest utworzony na podstawie matematycznie jednoznacznego przyporządkowania punktów powierzchni Ziemi odpowiednim punktom na płaszczyźnie według teorii odwzorowania kartograficznego Gaussa-Krügera. 2. Obszar kraju dzieli się na cztery pasy południkowe o szerokości 3 długości geograficznej każdy i o południkach osiowych: 15, 18, 21 i 24 długości geograficznej wschodniej, ponumerowane odpowiednio numerami: 5, 6, 7 i 8.

5 Podział terytorium Polski na 3-stopniowe pasy odwzorowania Gaussa- Krügera w układzie 2000 źródło: za: Instrukcja O-1/O-2 z 2001 r.
6 Ustala się, że układami odniesień przestrzennych w standardzie LMN będą: układ współrzędnych płaskich prostokątnych 1992, układ wysokości Kronsztad 1986, o których mowa w Rozporządzeniu Rady Ministrów z dnia 8 sierpnia 2000 roku w sprawie państwowego systemu odniesień przestrzennych (Dz.U. nr 70 z dn r., poz. 821).

7 Źródło: TRAKO

8 GPS Stare mapy sztabowe Geodezja - stare Standard LMN Geodezja - nowe
9 WGS 84 BLH WGS 84 XYH Układ Wymagane parametry szczegółowe Nie podaje się. Nie podaje się BLH / Pułkowo 42 Nie podaje się XYH Południk (15, 18, 21, 24) oraz szerokość pasa (3, 6). Układ 1965 odwzorowanie "1992" Strefa (I, II, III, IV, V). Nie podaje się. odwzorowanie "2000" Południk (15, 18, 21, 24). Elipsoida Krasowskiego 42XYZ GUGiK80 Nie podaje się. Nie podaje się.

10 SPUTNIK 1 (4 października 1957, ZSRR) pierwszy sztuczny satelita. Źródło:
11 MINITRACK (1958, NAVSPASUR 1961; USA) pasywny system śledzący satelity, wykorzystujący emitowane przez nie sygnały; związany był do śledzenia orbit radzieckich satelitów. TRANSIT ( ; USA) pierwszy satelita nawigacyjny umożliwiający określenie pozycji obiektów (np. rakiet balistycznych) w dwóch wymiarach (długość i szerokość geograficzna). Od 1964 r. system 4 satelitów umożliwiaj precyzyjne pozycjonowanie (m.in. łodzi podwodnych). CYKLON ( ; ZSRR) reakcja na system TRANSIT; początkowo dokładność wynosiła ok. 3 km; w 1969 już 100 m; pełna operacyjność od Źródło:
12 W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w celu stworzenia ogólnoświatowego, odpornego na warunki pogodowe, trójwymiarowego systemu nawigacyjnego, nazwanego Navstar GPS (Navigation System with Time And Ranging). Pierwszy, eksperymentalny blok satelitów (10 czynnych i 1 uszkodzony) został był umieszczony na orbicie i działał w latach (pierwszy umieszczony na orbicie ). 17 stycznia 1994 na orbitach pojawiła się pełna konstelacja 24 czynne satelity. System w pełni operacyjny (jako ogólnoświatowy) stał się w kwietniu Źródło:
13 GPS (Global Positioning System) Globalny System Wyznaczania Pozycji lub System Globalnego Pozycjonowania, to system umożliwiający wyznaczenie pozycji dowolnego punktu na globie ziemskim. Systemy nawigacji satelitarnej (NSS - Navigation Satellite Systems) to systemy umożliwiające wyznaczanie pozycji oraz nawigację (z punktu do punktu). Ze względu na zasięg można je podzielić na: globalne, regionalne.
14 Globalne systemy nawigacji satelitarnej (GNSS - Global Navigation Satellite Systems) za początek jego istnienia przyjmuje się datę 15 października 1993 roku, gdy 68 delegatów z 11 państw (w tym Polski) zawarło wstępne porozumienie w sprawie uruchomienia GNSS. Czy systemy nawigacji są ważnym elementem funkcjonowania naszej cywilizacji? Źródło:

15 Źródło:
16 Obecnie GNSS stanowią głównie satelity z systemów: Navstar GPS (USA) 24 satelity GLONASS (Rosja) 24 (23) satelity które obejmują swoim zasięgiem całą Ziemię; okrążając glob na średnich orbitach (MEO - Medium Earth Orbit). Źródło:
17 Regionalne systemy nawigacji satelitarnej (RNSS - Regional Navigation Satellite Systems) obejmują swoim zasięgiem tylko ograniczony obszar, z reguły fragment kontynentu. Ich głównym zadaniem jest lokalne zwiększanie dostępności i dokładności systemów GNSS; zazwyczaj nie są systemami samodzielnymi. Obecnie funkcjonują następujące systemy regionalne: Beidou-2/Compass (Chiny): jest 21 (od ); plan 35 satelitów (funkcjonuje, pełna operacyjność od 2012 Chiny/Azja/Pacyfik; 2020 na świecie), QZSS (Japonia): jest 1 (od ); plan 4 satelity (planowany od 2013), IRNSS (Indie): jest 4 (od ); plan 7 lub 11 satelitów (planowany od 2016); typ orbity: geostacjonarna i geosynchroniczna Źródło:


18 BeiDou-2/Compass (Chiny) QZSS (Japonia) Obszar pokryty przez sygnał z BeiDou-1 Źródło: Źródło:

19 IRNSS (Indie) Źródło:
20 System składa się z trzech grup elementów: część przekaźnikowa - systemu 24 satelitów umieszczonych na 6 okołoziemskich orbitach na wysokości km nad powierzchnią Ziemi, z których każdy transmituje informację czasową oraz dane nawigacyjne. Czas obiegu orbit wynosi około 12 godzin, przy czym są one rozmieszczone w ten sposób, aby z każdego punktu na Ziemi było widocznych co najmniej 5 nadajników. Taka konfiguracja umożliwia, z małymi wyjątkami, wyznaczenie pozycji dowolnego miejsca na powierzchni Ziemi o dowolnej porze dnia lub nocy. część naziemna - Głównej Stacji Nadzoru (Master Control Station w Bazie Sił Powietrznych Falcon w Colorado Springs) i lokalnych stacji monitorujących, część odbiorcza - odbiorników, którymi posługują się użytkownicy systemu GPS.
21 GPS zapewnia dwa poziomy dokładności: Dokładny Serwis Pozycyjny (PPS - Precise Positioning Service) Standardowy Serwis Pozycyjny (SPS - Standard Positioning Service). Dokładny serwis pozycyjny - PPS dostępny jest tylko dla autoryzowanych użytkowników, zapewniając wysoką dokładność danych o pozycji i czasie. Do autoryzowanych użytkowników należą: Siły Zbrojne USA i NATO (o autoryzacji użytkownika decyduje Departament Obrony USA).
22 Zespół satelitów stanowi przestrzenny ruchomy układ odniesienia wspólny dla całego globu ziemskiego. Specjalnie dobrane parametry orbit zapewniają warunek widoczności minimum czterech satelitów ponad horyzontem w dowolnym momencie i w każdym miejscu na Ziemi, co jest niezbędne do pełnego (przestrzennego) wyznaczenia położenia anteny odbiornika GPS. Każdy z satelitów emituje dwa sygnały o czasie i odległości.
23 Satelitarne Systemy Wspomagające (SBAS Satellite Based Augmentation System) rozwiązanie transmitujące poprawki dla sygnałów GNSS za pomocą jednego lub kilku satelitów geostacjonarnych (z reguły są to wielofunkcyjne aparaty telekomunikacyjne). Korekty obliczane są na podstawie danych z kilkunastu do kilkudziesięciu stacji pomiarowo-obserwacyjnych, transmitowane do satelity SBAS, a następnie retransmitowane na Ziemię. Niektóre rozwiązania SBAS oferują także informacje o wiarygodności systemów nawigacji. Jest to szczególnie przydatne np. w lotnictwie, żegludze czy podczas operacji służb ratunkowych.
 satelity, od 2013) GAGAN (Indie, 3 satelity, od 2014) SDCM (Rosja, 3 satelity, od 2013) OmniSTAR (ogólnoświatowy, 7 satelitów, od?) Źródło: http://geoforum.")
24 Istniejące lub planowane systemy SBAS to obecnie: EGNOS (UE, 3 satelity, od 2005/2009) WAAS (USA, 1(2) satelity, od 1999/2003) MSAS (Japonia, 2 satelity, od 2007) QZSS (Japonia, 1(3) satelity, od 2013) GAGAN (Indie, 3 satelity, od 2014) SDCM (Rosja, 3 satelity, od 2013) OmniSTAR (ogólnoświatowy, 7 satelitów, od?) Źródło:
25 EGNOS (European Geostationary Navigation Overlay Service) Kraje rozwijający system: Unia Europejska Aktualna liczba satelitów: 3 (Inmarsat AOR-E, Inmarsat IOR-W, Artemis) Docelowa liczba satelitów: bd. (w budowie: Sirius 5, Astra 5B) Typ orbity: geostacjonarna Działanie: od 1996 r. (pierwszy satelita) Ogłoszenie operacyjności: 2009 r. (dla usługi otwartej), 2011 r. (dla usługi bezpieczeństwa życia) Źródło:
 Źródło: http://en.wikipedia.org/wiki/file:egnos_map.")
26 Rozmieszczenie stacji pomiarowo-obserwacyjnych (RIMS), stacji kontrolnych (MCC) oraz stacji transmitujących (NLES) Źródło:
27 Program budowy EGNOS został zatwierdzony przez Radę Unii Europejskiej w 1994 roku. Do 1998 r. na orbicie umieszczono dwa satelity telekomunikacyjne, które później wykorzystano do emisji poprawek EGNOS. EGNOS w wersji 1 ruszył w lipcu 2005 roku. Rok później udostępniono wersję 2.1, która dawała dostęp w czasie rzeczywistym do poprawek mierzonych na tzw. stacjach RIMS (Ranging and Integrity Monitoring Station). W 2008 r. system w wersji 2.2 objął swoim zasięgiem również część Afryki. Oficjalne ogłoszenie pełnej operacyjności usługi otwartej (Open Service) nastąpiło 1 października 2009 roku. Obecnie (stan na 2010 r.) segment naziemny EGNOS składa się z 34 stacji pomiarowo-obserwacyjnych RIMS (jedna z nich od 27 września 2004 pracuje w Centrum Badań Kosmicznych PAN w Warszawie), 4 stacji kontrolnych (MCC), 6 stacji transmitujących (NLES) oraz 2 stacji kontrolno-testowych (w Tuluzie i Torrejon). Zgodnie z danymi publikowanymi przez administratorów systemu EGNOS umożliwia wyznaczenie pozycji z dokładnością 3 m w poziomie i 4 m w pionie. Niezawodność rozwiązania wynosi zaś 99%. Źródło:

28 Dostępność EGNOS w Europie Źródło:
29 Firma rozwijająca system: Fugro NV Aktualna liczba satelitów: 7 Docelowa liczba satelitów: 7 Typ orbity: geostacjonarna System opracowała firma Thales Geosolutions (część grupy Thales); pierwotnie nazywał się LandStar. Nazwę zmieniono z końcem 2004 roku, gdy spółkę kupiło holenderskie przedsiębiorstwo Fugro NV. OmniSTAR to pierwsze i jedyne komercyjne rozwiązanie SBAS. Od 2010 roku jest to także pierwszy tego typu system oferujący poprawki dla GLONASS. OmniSTAR ma rekordowy zasięg poprawki dostępne są dla większości obszarów lądowych świata. Segment naziemny systemu składa się z około 100 stacji referencyjnych (najbliżej Polski znajdują się w Wiedniu i Charkowie) i dwóch stacji kontrolnych. Źródło:

30 Mapa pokrycia sygnału z OmniSTAR dla Afryki i Europy Źródło:
31 Naziemne systemy wspomagania satelitarnego (GBAS Ground Based Augmentation Systems) charakteryzuje je dużo mniejszy zasięg działania oraz większa dokładność pomiarów i elastyczność. Systemy te oferują usługi w czasie rzeczywistym lub w trybie postprocessingu. Te pierwsze bazują na obliczeniach DGNSS (Differential GNSS) lub bardziej dokładnych RTK (Real-Time Kinematic). Transmisja danych odbywa się przez radio (fale UHF lub VHF) lub internet (także przez sieci GSM). Źródło:
32 System, o nazwie GLONASS (ГЛОНАСС, Глобальная навигационная спутниковая система), uruchomiony został w Związku Radzieckim. Pełna konstelacja satelitów GLONASS miała się składać z 24 obiektów rozmieszczonych na 3 płaszczyznach orbitalnych. Na każdej płaszczyźnie powinno znajdować się 8 równomiernie rozmieszczonych satelitów. Orbity są kołowe i znajdują się na wysokości około km. Okres obiegu wynosi 11h15m. Po skompletowaniu, na początku 1996 roku, pełen zestaw satelitów był dostępny przez okres około 40 dni. Pod koniec roku 1996 na orbicie znajdowało się 21 aktywnych obiektów. Na początku 2002 roku składał się już tylko z 6 satelitów, co czyniło je praktycznie bezużytecznymi. Na początku 2004 roku segment kosmiczny składał się już z 13 aparatów, w 2009 z 20. Rozpoczęto także prace nad satelitami trzeciej generacji (K) i systemem wspomagania satelitarnego (SDCM).
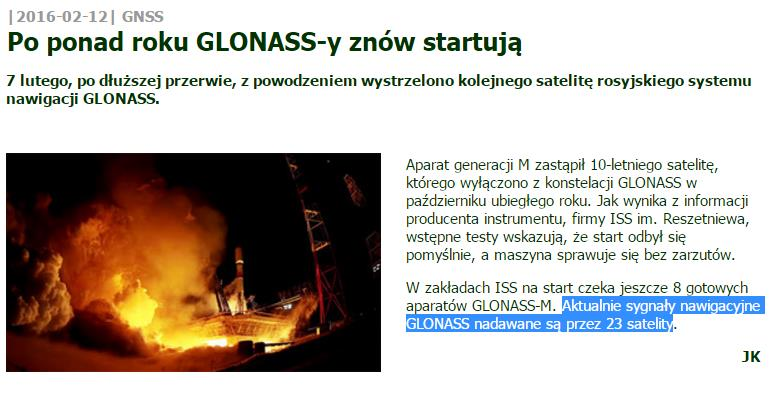
33 administratorzy systemu po włączeniu 24. aparatu generacji M oficjalnie ogłosili pełną operacyjność systemu na całym świecie. Rosja pracuje obecnie nad nową generacja satelitów oznaczoną literą K, których czas życia będzie wynosił lat, a waga 750 kg, podczas gdy aparaty serii M ważą 1415 kg i są zaprojektowane na 7 lat. Wg stanu na to łącznie 31 satelitów, z czego 24 miało status operacyjny, a 3 rezerwowy. W dalszej kolejności planowane jest wystrzelenie kilku satelitów serii GLONASS-M jako rezerwa systemu oraz satelitów trzeciej generacji GLONASS-K (od satelity generacji K stopniowo zastępują serię M). GLONASS nie stosuje żadnych zakłóceń!
34 Źródło:
35 Źródło:
36 Pięć podstawowych kategorii sygnałów: Open Service (Serwis Otwarty) - bezpłatny, powszechnie dostępny pomiar czasu i pozycji. Safety of Life Service (Serwis Bezpieczeństwo Życia) - jw.; gwarancja jakości i pewności sygnału (dokładność lokalizacji jak w OS), odbiorniki z odpowiednim certyfikatem. Commercial Service (Serwis Komercyjny) - płatny, zwiększona precyzja (dwa dodatkowe kodowane sygnały) i gwarancja jakości sygnału. Public Regulated Service (Serwis Publiczny Regulowany) - przeznaczony dla administracji państwowej, sygnał kodowany oddzielony od innych dla zapewnienia jakości i pewności usługi. Search and Rescue Service (Serwis Poszukiwanie i Ratownictwo) do precyzyjnej lokalizacji i komunikacji pomiędzy wysyłającym sygnał ratunkowy a operatorem usługi.
37 Od 1999 roku trwają intensywne prace nad utworzeniem satelitarnego systemu nawigacyjnego Galileo, który jest wspólnym przedsięwzięciem Unii Europejskiej i Europejskiej Agencji Kosmicznej (ESA). Budowę Galileo podzielono na cztery fazy. Pierwsza, obejmująca definiowanie systemu, została zakończona ( ). Druga, zaplanowana na lata , związana jest z opracowaniem ram instytucjonalnych systemu, ich zatwierdzeniem i umieszczeniem na orbicie testowych satelitów. Została ona oszacowana na 1,1 mld euro, a kosztami podzielą się Komisja Europejska i ESA. Faza kolejna obejmująca budowę i wystrzelenie satelitów oraz rozwój infrastruktury naziemnej przewidziana jest na lata Jej koszty (2,1 mld euro) zostaną pokryte głównie przez przyszłych koncesjobiorców. Pierwszego testowego satelitę (GIOVE-A) wystrzelono 28 grudnia 2005 r. Następny satelita (GIOVE-B), został wystrzelony 27 kwietnia 2008 r. Ostatni etap rozpocznie się w 2008 r., kiedy system będzie w pełni operacyjny. Zakłada się, że roczne wydatki na jego utrzymanie wyniosą ok. 220 mln euro. źródło: oraz
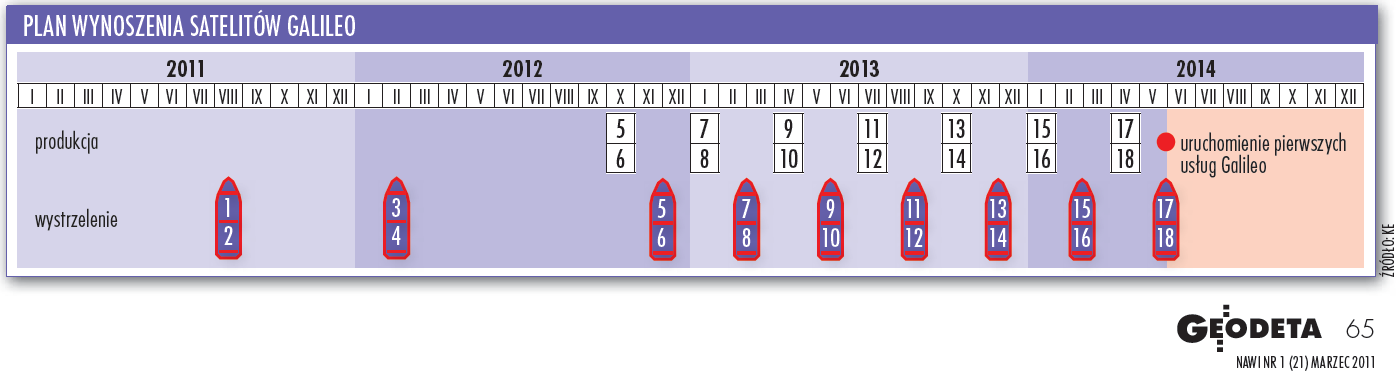
38 1. 30 satelitów (w tym trzy rezerwowe, aktywne) obecnie (2010) planuje się uruchomienie jedynie 22 satelitów (stan na = 10 satelitów) umieszczonych na wysokości km, na trzech orbitach kołowych (MEO - Medium Earth Orbits - Średnie Orbity Ziemskie), nachylonych do płaszczyzny równika pod kątem 56, 2. sieć stacji naziemnych, 3. centra regionalne. Termin uruchomienia systemu Galileo: zakładany na etapie planowania systemu 2008 r., planowany: 2010 r. (plan z roku 2008), planowany: r. (plan z roku 2010).
39 źródło:
40 Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów absolutnych w sposób różnicowy Absolutne wyznaczenie współrzędnych przestrzennych odbywa się na zasadzie rejestracji jednym odbiornikiem sygnałów pochodzących z minimum czterech satelitów. Ze względu na duży wpływ środowiska na właściwości propagacji fal radiowych (jonosfera, troposfera, sygnały odbite), niedokładności parametrów orbit satelitów wyznaczane tą metodą współrzędne osiągają dokładność od kilku do kilkunastu metrów.
41 X, Y, H =? Bezwzględne wyznaczenie przestrzennej pozycji anteny odbiornika GPS
42 Metoda różnicowa wymaga synchronicznych obserwacji przy zastosowaniu co najmniej dwóch odbiorników GPS, gdzie: 1. jeden z nich traktowany jest jako stacja bazowa (referencyjna) 2. drugi jako stacja ruchoma ( nasz odbiornik). Wymagane jest, aby dla stacji bazowej znane były współrzędne przestrzenne wyznaczone w tym samym układzie odniesienia, w którym funkcjonuje system GPS. W tym przypadku wyznaczane są różnice współrzędnych pomiędzy stacją bazową a odbiornikiem ruchomym. Ze względu na niewielkie odległości (do km) pomiędzy odbiornikami w stosunku do odległości satelitów od powierzchni Ziemi przyjmuje się, że sygnały docierające do obydwu anten przechodzą przez jednorodne środowisko. Założenie to pozwala usunąć w procesie obliczeniowym prawie cały wpływ wspomnianych źródeł błędów na wyznaczane pozycje anteny odbiornika ruchomego. Wyznaczane tą drogą współrzędne względne osiągają dokładności rzędu od 1 m do kilku centymetrów (w zależności od typu odbiorników i stosowanych metod pomiarowych).
43 Nasz odbiornik X, Y, H =? Stacja bazowa (referencyjna) Serwer z poprawkami różnicowymi Z n a n e : X, Y, H
44 Pomiary statyczne (Static relative positioning) Pomiary kinematyczne (Kinematic relative positioning) Pomiary pół-kinematyczne (Semi-kinematic relative positioning), pomiary "STOP & GO" Pomiary pseudo-statyczne/pseudo-kinematyczne (Pseudo-static = pseudo-kinematic relative positioning, intermittent static positioning, reoccupation) Pomiary szybkie statyczne (Fast/rapid static relative positioning) Pomiary dyferencjalne (DGPS Differential GPS)
45 1. Przed przystąpieniem do prac terenowych z wykorzystaniem odbiorników GPS należy zaplanować sesje pomiarowe. Na dokładność wyznaczanych współrzędnych bardzo istotny wpływ (poza czynnikami środowiskowymi, np.: warstwy atmosfery, przesłonięcie horyzontu, fale odbite) mają: liczba i konstelacja satelitów. Ponieważ satelity GPS poruszają się po swych orbitach, ich rozmieszczenie na nieboskłonie ulega ciągłej zmianie. 2. Liczba i rozmieszczenie satelitów na nieboskłonie (wsp. PDOP) 3. Moc odbieranego sygnału GPS (wsp. SNR) 4. Wysokość i zwarcie drzewostanu, a szczególnie występowanie w bezpośrednim sąsiedztwie dużych pni drzew
46 ASG-EUPOS (Aktywna Sieć Geodezyjna EUPOS) sieć składająca się z 98 polskich stacji permanentnych (84 stacji z modułem GPS, 14 stacji z modułem GPS/GLONASS), zlokalizowanych w instytucjach naukowych oraz w Ośrodkach Dokumentacji Geodezyjno-Kartograficznych na obszarze Polski, ze średnią wzajemną odległością 70 km. System uzupełniają 22 stacje zagraniczne. System służy do generowania i wysyłania do odbiorców poprawionego sygnału GNSS (czyli GPS i GLONASS), dzięki czemu można znacznie zwiększyć dokładność lokalizacji punktu na powierzchni ziemi za pomocą urządzeń GPS. System umożliwia, przy wykorzystaniu pomiaru GPS-RTK, lokalizację z dokładnością 3 cm (składowa pozioma) i 5 cm (składowa pionowa). Natomiast w systemie POZGEO i POZGEO-D dokładność wyznaczenia pozycji w postprocessingu może być rzędu 1 mm. Wcześniej podobny system, ASG-PL, istniał jedynie dla Województwa Śląskiego (od 2004) i umożliwiał porównywalne dokładności dla całego obszaru województwa. System ASG-EUPOS jest w pełni funkcjonalny od czerwca Źródło:
47 Rozmieszczenie stacji referencyjnych systemu ASG-EUPOS Źródło:
48 Serwisy udostępniane przez ASG-EUPOS Rodzaj Nazwa Metoda pomiaru Transmisja danych Zakładana dokładność Minimalne wymagania sprzętowe Serwisy czasu rzeczywistego NAWGEO KODGIS NAWGIS kinematyczna (RTK) kinematyczna (DGPS) Internet, GSM (GPRS) do 0,03 m (poz.) do 0,05 m (pion.) do 0,25 m do 3 m Odbiornik L1/L2 RTK, moduł komunikacyjny Odbiornik L1 DGPS, moduł komunikacyjny Serwisy postprocessingu POZGEO POZGEO D statyczna statyczna, kinematyczna Internet Zależna od warunków pomiarowych (0,01-0,10 m) Odbiornik L1 Źródło:
49 sieć TPI NET TPI NET pro ASG EUPOS liczba stacji ogółem GPS GPS + GLONASS GPS + GLONASS + brak 115 brak 115 GALILEO poprawka powierzchniowa brak tak tak tak TPI NET pro +ASG EUPOS mapa zasięgu - mapa 1 mapa 2 mapa 3 dostępność tylko klienci TPI tylko zarejestrowani klienci TPI ogólnodostępna ogólnodostępna dla zarejestrowanych klientów TPI Źródło:
50 sieć TPI NET pro 1) ASG EUPOS 2) Średni abonament roczny 3) kwota Ok PLN Ok PLN 1) TPI sygnał z NAVSTAR GPS + GLONASS 2) ASG EUPOS - sygnał głównie z NAVSTAR GPS + miejscowo z GLONASS 3) udostępniane są różne warianty abonamentu

51 Rozmieszczenie stacji referencyjnych systemu ASG-EUPOS Źródło:
52 Rozmieszczenie stacji referencyjnych systemu TPI Źródło:
53 Rozmieszczenie stacji referencyjnych systemu ASG-EUPOS oraz TPI Źródło:

54 Rozmieszczenie stacji referencyjnych TRIMTECH GEOTRONI CSSPECTRA Źródło:
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Linie siatki topograficznej (kilometrowej) dzielą każdą strefę odwzorowania na słupy o szerokości 64 km oraz
GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Linie siatki topograficznej (kilometrowej) dzielą każdą strefę odwzorowania na słupy o szerokości 64 km oraz
GEOMATYKA program rozszerzony. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program rozszerzony 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu SPUTNIK 1 (4 października 1957, ZSRR) pierwszy sztuczny satelita. MINITRACK (1958, NAVSPASUR
GEOMATYKA program rozszerzony 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu SPUTNIK 1 (4 października 1957, ZSRR) pierwszy sztuczny satelita. MINITRACK (1958, NAVSPASUR
GEOMATYKA program podstawowy
 GEOMATYKA program podstawowy 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
GEOMATYKA program podstawowy 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p.
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu źródło: http://www.esa.int/our_activities/observing_the_earth/goce Satelita GOCE Orbita:
GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu źródło: http://www.esa.int/our_activities/observing_the_earth/goce Satelita GOCE Orbita:
SYSTEMY INFORMACJI PRZESTRZENNEJ
 SYSTEMY INFORMACJI PRZESTRZENNEJ 2014-2015 program rozszerzony dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki
SYSTEMY INFORMACJI PRZESTRZENNEJ 2014-2015 program rozszerzony dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce
 ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
ASG-EUPOS wielofunkcyjny system precyzyjnego pozycjonowania i nawigacji w Polsce Jarosław Bosy, Marcin Leończyk Główny Urząd Geodezji i Kartografii 1 Projekt współfinansowany przez Unię Europejską Europejski
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Typowe konfiguracje odbiorników geodezyjnych GPS. dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie
 Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
Typowe konfiguracje odbiorników geodezyjnych GPS dr hab. inż. Paweł Zalewski Akademia Morska w Szczecinie 1) RTK (Real Time Kinematics) Wymaga dwóch pracujących jednocześnie odbiorników oraz łącza radiowego
GEOMATYKA. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA 2019 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel. 61-848-7667; (sekretariat:
GEOMATYKA 2019 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel. 61-848-7667; (sekretariat:
GEOMATYKA. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel. 61-848-7667; (sekretariat:
GEOMATYKA 2018 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel. 61-848-7667; (sekretariat:
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W celu ujednolicenia wyników pomiarów geodezyjnych, a co za tym idzie umożliwienia tworzenia
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
GEOMATYKA program rozszerzony
 GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel.
GEOMATYKA program rozszerzony 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Katedra Urządzania Lasu Kolegium Cieszkowskich, parter, p. 3 (p. 2 - sekretariat) Tel.
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Serwisy czasu rzeczywistego: NAWGEO KODGIS NAWGIS Artur Oruba specjalista Szkolenie Służby Geodezyjnej
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Patronat nad projektem objęły: ESA (Europejska Agencja Kosmiczna), Komisja Europejska (KE),
, Komisja Europejska (KE),") Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
Początki Dynamiczny rozwój systemów nawigacji satelitarnej i ich wykorzystania w bardzo wielu dziedzinach życia codziennego, przyczynił się do faktu, że także w Europie zaczęto myśleć nad stworzeniem własnego
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS. Artur Oruba specjalista administrator systemu ASG-EUPOS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Artur Oruba specjalista administrator systemu ASG-EUPOS Plan prezentacji Techniki DGNSS/ RTK/RTN Przygotowanie do pomiarów Specyfikacja
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary różnicowe GNSS i serwisy czasu rzeczywistego: NAWGEO, KODGIS, NAWGIS Szymon Wajda główny
Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia r.
 Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia 10.01.2008r. ROZPORZĄDZENIE RADY MINISTRÓW z dnia 2008 r. w sprawie państwowego systemu odniesień przestrzennych Na podstawie art.
Projekt nowelizacji RRM w sprawie systemu odniesień przestrzennych z dnia 10.01.2008r. ROZPORZĄDZENIE RADY MINISTRÓW z dnia 2008 r. w sprawie państwowego systemu odniesień przestrzennych Na podstawie art.
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
ASG EUPOS w państwowym systemie odniesień przestrzennych
 ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
ASG EUPOS w państwowym systemie odniesień przestrzennych Marcin Ryczywolski Departament Geodezji, Kartografii i Systemów Informacji Geograficznej II Konferencja Użytkowników ASG EUPOS Katowice, 20 21 listopada
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11
 Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Załącznik nr 7 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/11 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI PROMOTOR Prof. dr hab. inż. Stanisław Oszczak PROMOTOR Mieczysław Bakuła 1.
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS
 Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Układy odniesienia i systemy współrzędnych stosowane w serwisach systemu ASG-EUPOS Marcin Ryczywolski marcin.ryczywolski@gugik.gov.pl Główny Urząd Geodezji i Kartografii Białobrzegi, 9-10 grudnia 2013
Przegląd metod zwiększania precyzji danych GPS. Mariusz Kacprzak
 Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Przegląd metod zwiększania precyzji danych GPS Mariusz Kacprzak Plan prezentacji: 1) Omówienie podstaw funkcjonowania GPS 2) Zasada wyznaczenie pozycji w GPS 3) Błędy wyznaczania pozycji 4) Sposoby korekcji
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista
 Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Wiesław Graszka naczelnik wydziału Szymon Wajda główny specjalista Konferencja Satelitarne metody wyznaczania pozycji we współczesnej geodezji i nawigacji Wrocław 02-04. czerwca 2011 r. Wprowadzenie Zakres
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Systemy pozycjonowania i nawigacji Navigation and positioning systems
 KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Nazwa modułu w języku angielskim Obowiązuje od roku akademickiego 2015/2016 Systemy pozycjonowania i nawigacji Navigation and positioning systems
AKTUALNY STAN REALIZACJI PROJEKTU ASG+
 AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
AKTUALNY STAN REALIZACJI PROJEKTU ASG+ Figurski Mariusz Centrum Geomatyki Stosowanej WAT Wydział Inżynierii Lądowej i Geodezji WAT Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
Rozkład poprawek EGNOS w czasie
 KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
KAŹMIERCZAK Rafał 1 GRUNWALD Grzegorz 1 Rozkład poprawek EGNOS w czasie EGNOS, DGPS, nawigacja Streszczenie Tematyką niniejszego artykułu jest odpowiedź na pytanie: w jaki sposób zmienia się wartość poprawki
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Marcin Ryczywolski
Nawigacja satelitarna
 Nawigacja satelitarna Warszawa, 17 lutego 2015 Udział systemów nawigacji w wybranych działach gospodarki - aspekty bezpieczeństwa i ekonomiczne efekty Ewa Dyner Jelonkiewicz ewa.dyner@agtes.com.pl Tel.607459637
Nawigacja satelitarna Warszawa, 17 lutego 2015 Udział systemów nawigacji w wybranych działach gospodarki - aspekty bezpieczeństwa i ekonomiczne efekty Ewa Dyner Jelonkiewicz ewa.dyner@agtes.com.pl Tel.607459637
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
UKŁADY GEODEZYJNE I KARTOGRAFICZNE
 UKŁADY GEODEZYJNE I KARTOGRAFICZNE Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Model ZIEMI UKŁAD GEODEZYJNY I KARTOGRAFICZNY x y (f o,l o ) (x o,y o ) ZIEMIA
UKŁADY GEODEZYJNE I KARTOGRAFICZNE Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu Model ZIEMI UKŁAD GEODEZYJNY I KARTOGRAFICZNY x y (f o,l o ) (x o,y o ) ZIEMIA
Dwa podstawowe układy współrzędnych: prostokątny i sferyczny
 Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
SATELITARNE TECHNIKI POMIAROWE
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 2 SYSTEMY WSPOMAGANIA SATELITARNEGO I NAZIEMNEGO IAG GGOS PORTAL, INTERNATIONAL SERVICE GNSS (IGS) ALTERNATYWNE DO GNSS METODY OBSERWACJI SATELITARNYCH 1 SYSTEMY SBAS
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008
 ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
ZESZYTY NAUKOWE WYDZIAŁU ETI POLITECHNIKI GDAŃSKIEJ Nr 6 Seria: Technologie Informacyjne 2008 Mariusz Chmielecki, Agnieszka Jurkowska, Karol Rudziński, Cezary Specht, Jakub Szulwic, Tadeusz Widerski Politechnika
Podstawy Geomatyki. Wykład III Systemy GNSS
 Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
Podstawy Geomatyki Wykład III Systemy GNSS NAVSTAR GPS Najnowocześniejszy z satelitarnych systemów nawigacyjnych, satelitarny system nawigacyjny Navstar(NavigationalSatelliteTime and Ranging) znany pod
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim
 Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Budowa infrastruktury użytkowej systemu pozycjonowania satelitarnego w województwie mazowieckim Paweł Tabęcki Biuro Geodety Województwa Mazowieckiego Dział Katastralnej Bazy Danych sierpień 2006 Plan prezentacji
Katedra Geodezji Satelitarnej i Nawigacji. Geodezja i geoinformatyka
 Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Załącznik nr 8 STUDIA NIESTACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Adam
Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ Wykorzystanie systemu ASG-EUPOS do wykonania prac geodezyjnych i kartograficznych Opracowanie: Ryszard
Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Pomiary statyczne GNSS i serwisy postprocessingu: POZGEO, POZGEO D i POZGEO DF Szymon Wajda główny
System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju Szymon Wajda główny specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju Szymon Wajda główny specjalista Szkolenie
Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów budowlanych. Str. 1.Sprawozdanie techniczne 2-3
 Rok akademicki 2011/2012 Grupa BD1 LP3 Środa 10.15-13.00 Katedra Geodezji im. Kaspra WEIGLA ĆWICZENIE nr 2 Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów
Rok akademicki 2011/2012 Grupa BD1 LP3 Środa 10.15-13.00 Katedra Geodezji im. Kaspra WEIGLA ĆWICZENIE nr 2 Temat: Geodezyjne pomiary sytuacyjne w budownictwie inwentaryzacja powykonawcza fragmentów obiektów
Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów współrzędnych
 Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
Załącznik nr 1 Parametry techniczne geodezyjnych układów odniesienia, układów wysokościowych i układów Tabela 1. Parametry techniczne geodezyjnego układu odniesienia PL-ETRF2000 Parametry techniczne geodezyjnego
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS
 OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
OPRACOWANIE DANYCH GPS CZĘŚĆ I WPROWADZENIE DO GPS Bernard Kontny Katedra Geodezji i Fotogrametrii Akademia Rolnicza we Wrocławiu ZAGADNIENIA Ogólny opis systemu GPS Struktura sygnału Pomiar kodowy i fazowy
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Bartłomiej OSZCZAK 1 Michał WARDZIEJEWSKI 2 Tomasz KLOCKOWSKI 3 Słowa kluczowe: EGNOS,ASG EUPOS,NAWGIS,KODGIS,GNSS,GPS,GSM/GPRS
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Bartłomiej OSZCZAK 1 Michał WARDZIEJEWSKI 2 Tomasz KLOCKOWSKI 3 Słowa kluczowe: EGNOS,ASG EUPOS,NAWGIS,KODGIS,GNSS,GPS,GSM/GPRS
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static
 Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Procedura obliczeniowa zakładania osnowy pomiarowej dwufunkcyjnej odbiornikami AZUS Star i AZUS L1Static Procedura jest określona postanowieniami wycofanego standardu technicznego (instrukcji) G-2 z 2001
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA
 Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu materiały przygotowane m.in. w oparciu o rozdział Odwzorowania
Wybrane zagadnienia z urządzania lasu moduł: GEOMATYKA 2014-2015 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu materiały przygotowane m.in. w oparciu o rozdział Odwzorowania
ZALECENIA TECHNICZNE
 GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
GŁÓWNY GEODETA KRAJU ZALECENIA TECHNICZNE Pomiary satelitarne GNSS oparte na systemie stacji referencyjnych ASG-EUPOS Warszawa, 2011 r. Zalecenia techniczne opracował zespół w składzie: Wiesław Graszka,
Definicja i realizacja europejskiego systemu wysokościowego EVRS w Polsce
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Definicja i realizacja europejskiego systemu wysokościowego EVRS w Polsce Wiesław Graszka naczelnik
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Definicja i realizacja europejskiego systemu wysokościowego EVRS w Polsce Wiesław Graszka naczelnik
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS SATELITARNE TECHNIKI POMIAROWE
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji.
 Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Satelitarny system nawigacyjny Galileo, przeznaczenie, struktura i perspektywy realizacji. Cezary Specht Instytut Nawigacji i Hydrografii Morskiej Akademia Marynarki Wojennej w CSpecht@amw.gdynia.pl Satelitarny
Kartografia - wykład
 prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
prof. dr hab. inż. Jacek Matyszkiewicz KATEDRA ANALIZ ŚRODOWISKOWYCH, KARTOGRAFII I GEOLOGII GOSPODARCZEJ Kartografia - wykład Systemy nawigacji satelitarnej i ich wykorzystanie w kartografii Systemy nawigacji
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi. Ewa Dyner Jelonkiewicz. ewa.dyner@agtes.com.pl Tel.
 TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT
 TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Bartłomiej OSZCZAK 1 Michał WARDZIEJEWSKI 2 Tomasz KLOCKOWSKI 3 EGNOS,ASG EUPOS,NAWGIS, KODGIS,GNSS, GPS,GSM/GPRS
TRANSCOMP XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCE, INDUSTRY AND TRANSPORT Bartłomiej OSZCZAK 1 Michał WARDZIEJEWSKI 2 Tomasz KLOCKOWSKI 3 EGNOS,ASG EUPOS,NAWGIS, KODGIS,GNSS, GPS,GSM/GPRS
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
GIS MOBILNY 3. Pozycjonowanie satelitarne
 GIS MOBILNY 3. Pozycjonowanie satelitarne Dr inż. Jan Blachowski Politechnika Wrocławska Instytut Górnictwa Zakład Geodezji i GIS Pl. Teatralny 2 tel (71) 320 68 73 GIS MOBILNY WYKŁAD.3 - SYLLABUS Parametry
GIS MOBILNY 3. Pozycjonowanie satelitarne Dr inż. Jan Blachowski Politechnika Wrocławska Instytut Górnictwa Zakład Geodezji i GIS Pl. Teatralny 2 tel (71) 320 68 73 GIS MOBILNY WYKŁAD.3 - SYLLABUS Parametry
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR. Agrocom Polska Jerzy Koronczok
 Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR Agrocom Polska Jerzy Koronczok Poprawki korekcyjne dostępne w Polsce Odpowiednia dokładność
Poprawa dokładności prowadzenia równoległego maszyn i ciągników rolniczych dzięki zastosowaniu serwisu NAWGEO VRS CMR Agrocom Polska Jerzy Koronczok Poprawki korekcyjne dostępne w Polsce Odpowiednia dokładność
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski
 Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
Wykorzystanie serwisu ASG-EUPOS do badania i modyfikacji poprawek EGNOS na obszarze Polski Leszek Jaworski Anna Świątek Łukasz Tomasik Ryszard Zdunek Wstęp Od końca 2009 roku w Centrum Badań Kosmicznych
ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej ASG-EUPOS system wspomagania pomiarów satelitarnych i nawigacji Szymon Wajda główny specjalista
TPI. Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne. Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych.
 AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
AGENDA SPOTKANIA TPI Systemy GPS, GLONASS, GALILEO Techniki pomiarowe Stacje referencyjne Odbiorniki GPS/GLONASS Nowości w pozyskiwaniu danych Pytania TPI TPI Grupa ponad 50 osób pracująca wraz z Tobą
Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS Wiesław Graszka naczelnik
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Układy odniesienia i systemy współrzędnych stosowane w serwisach ASG-EUPOS Wiesław Graszka naczelnik
Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej
 CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
CIEĆKO Adam 1,2 GRZEGORZEWSKI Marek 2 ĆWIKLAK Janusz 2 OSZCZAK Stanisław 2 GRUNWALD Grzegorz 1 BABER Krzysztof 2 Wykorzystanie systemów satelitarnych w bezpiecznej nawigacji powietrznej WSTĘP Nawigacja
System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju Szymon Wajda główny specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej System ASG-EUPOS stan dzisiejszy i perspektywy rozwoju Szymon Wajda główny specjalista Szkolenie
Katedra Geodezji Satelitarnej i Nawigacji
 Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
Załącznik nr 7.1 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2012/2013 Katedra Geodezji Satelitarnej i Nawigacji (nazwa Jednostki Organizacyjnej) Geodezja i geoinformatyka (Specjalność) Dr hab.
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2010/2011 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR KRÓTKA CHARAKTERSYTYKA Badania nad dokładnością i wiarygodnością wyznaczania pozycji technika
Za szczególne zaangażowanie i wkład w opracowanie raportu autorzy dziękują:
 Foresight Przyszłość technik satelitarnych w Polsce to realizowany przez Polskie Biuro ds. Przestrzeni Kosmicznej projekt, którego celem jest ocena perspektyw i korzyści z wykorzystania technik satelitarnych
Foresight Przyszłość technik satelitarnych w Polsce to realizowany przez Polskie Biuro ds. Przestrzeni Kosmicznej projekt, którego celem jest ocena perspektyw i korzyści z wykorzystania technik satelitarnych
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych
 Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
Wykorzystanie sieci ASG EUPOS w zadaniach związanych z realizacją systemu odniesień przestrzennych Marcin Ryczywolski 1, Tomasz Liwosz 2 1 Główny Urząd Geodezji i Kartografii, Departament Geodezji, Kartografii
ASG-EUPOS serwisy postprocessingu
 Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Satelitarne Techniki Pomiarowe ASG-EUPOS serwisy postprocessingu System ASG-EUPOS System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG. Acta Scientifica Academiae Ostroviensis nr 30, 69-75
 Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Magdalena Oleszczuk Wielofunkcyjny system stacji referencyjnych ASG Acta Scientifica Academiae Ostroviensis nr 30, 69-75 2008 Wielofunkcyjny System Stacji Referencyjnych ASG/Eupos-pl... 69 Magdalena Oleszczuk
Obszar badawczy i zadania geodezji satelitarnej
 Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Szczegółowe omówienie wybranych zagadnień Zaleceń technicznych Artur Oruba specjalista Szkolenie
TEMATYKA PRAC DYPLOMOWYCH MAGISTERSKICH STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013
 STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
STUDIA STACJONARNE DRUGIEGO STOPNIA ROK AKADEMICKI 2012/2013 Instytut Geodezji GEODEZJA GOSPODARCZA PROMOTOR Dr hab. Zofia Rzepecka, prof. UWM Dr inż. Dariusz Gościewski Analiza możliwości wyznaczenia
WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS TYTUŁ WYKŁADU Wykorzystanie
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII DEPARTAMENT GEODEZJI KARTOGRAFII I SYSTEMÓW INFORMACJI GEOGRAFICZNEJ WIELOFUNKCYJNY SYSTEM PRECYZYJNEGO POZYCJONOWANIA SATELITARNEGO ASG-EUPOS TYTUŁ WYKŁADU Wykorzystanie