Dlaczego system GPS latającym Einsteinem jest?
|
|
|
- Liliana Nowacka
- 6 lat temu
- Przeglądów:
Transkrypt

1 Dlaczego system GPS latającym Einsteinem jest? (Dżipiesomania) dr hab. inż. Włodzimierz Salejda, prof. nadzw. PWr, Instytut Fizyki PWr Cykl wykładów popularno-naukowych Wrocław, 15 III 006
 oraz nawigacja, to dwa odwieczne problemy, z którymi radzić sobie musieli dawniej wędrowcy, podróżnicy, żeglarze, a dziś kierowcy,")
2 Gdzie jestem i dokąd zmierzam? Dwa ważne pytania i problemy: 1. Gdzie znajduję się w danej chwili?. Jak dostać się z miejsca A do B? Wyznaczenie aktualnego położenia (pozycjonowanie) oraz nawigacja, to dwa odwieczne problemy, z którymi radzić sobie musieli dawniej wędrowcy, podróżnicy, żeglarze, a dziś kierowcy, marynarze, piloci, turyści, globtroterzy, wędrownicy.

 Dlaczego system GPS latającym Einsteinem jest? http://www.colorado.")
3 GPS co to jest? Satelitarny Układ Nawigacji Globalnej Pierwszy GPS sfinansował i dziś kontroluje Departament Obrony USA. GPS generuje i wysyła sygnały elektromagnetyczne, które przetwarzają odbiorniki GPS, co umożliwia użytkownikowi wyznaczyć swoje położenie, prędkość i czas. Cztery GPS satelitarne sygnały są używane do wyznaczenia położenia w 3-wymiarowej przestrzeni oraz czasu (offset niedokładności czasu odbiornika). Nazwa ang. Global Navigation Satellite System (GNSS) Dlaczego system GPS latającym Einsteinem jest?
4 Elementy strukturalne GPS 4 (9) satelity orbitujące na wysokości km w 6 różnych płaszczyznach nachylonych do płaszczyzny równika pod kątem 54 o o czasie obiegu Ziemi równym 11 h i 58 minut wyposażonych w dwa zegary atomowe mierzące czas z dokładnością 4 nanosekund(!) na dobę. System naziemnych stacji m.in. monitorujących funkcjonowanie i położenia satelitów, synchronizujących zegary atomowe, sterujących funkcjonowaniem GPS. Nawigacja odbywa się w układzie ziemskim (nieinercjalnym, obracającym się wraz z Ziemią); GPS używa układu poruszającego się razem z Ziemią po orbicie okołosłonecznej oraz układu gwiezdnego (nieruchomego, inercjalnego).


5 Elementy składowe GPS segment satelitarny Składa się z 4 satelitów (space vehicles SVs), które wysyłają sygnały w przestrzeń okołoziemską. Bywa, że segment ten zawiera więcej niż 4 satelitów, ponieważ niektóre z nich są zastępowane przez nowo-cześniejsze. Obecnie orbituje 9. Każdy satelita okrąża Ziemię w czasie 1 godzin (bez sek.) na wysokości km. Satelita pojawia się raz na 4 godziny nad tym samym punktem globu (4 minuty wcześniej każdego dnia). Na GPS składa się 6 orbitalnych płaszczyzn, po których krążą nominalnie 4 pojazdy; odległość kątowa między płaszczyznami wynosi 60 stopni. Płaszczyzny te są nachylone do płaszczyzny równika pod kątem 55 O. Taka konstelacja zapewnia użytkownikowi kontakt elektromagnetyczny z 5, 6, 7 lub 8 satelitami niezależnie od miejsca położenia na Ziemi.


6 Elementy składowe GPS segment satelitarny Płaszczyzny te są nachylone do płaszczyzny równika pod kątem 55 O. Taka konstelacja satelitów GPS zapewnia użytkownikowi kontakt elektromagnetyczny z 5, 6, 7 lub 8 satelitami niezależnie od miejsca położenia odbiornika na Ziemi. Na pokładzie każdego satelity znajdują się 4 zegary atomowe cezowe i rubidowe. Mierzą czas z dokładnością do 4 nanosekund na dobę. Satelity emitują elektromagnetyczne sygnały, które wykorzystują odbiorniki naziemne do wyznaczania położenia na powierzchni Ziemi oraz czasu.
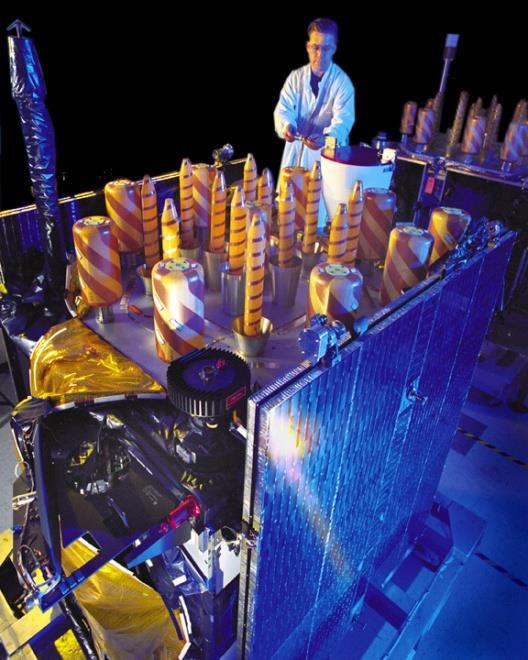

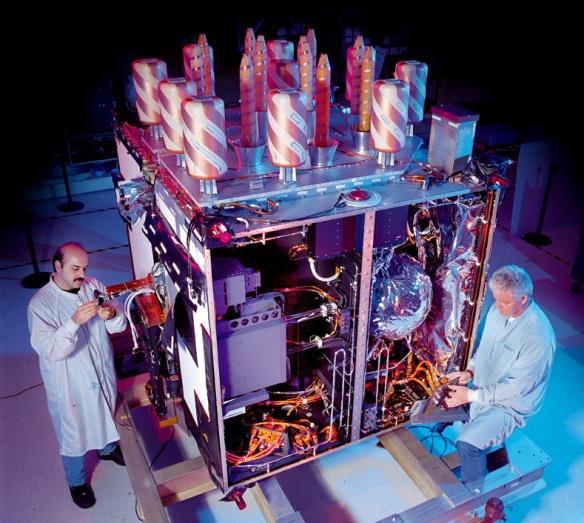


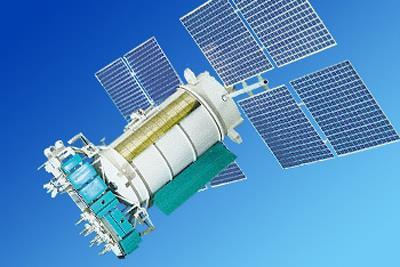
7 Satelity Producent: Lockheed Martin USA; GLONASS, satelita, Rosja




8 Zdjęcia ze startu rakiety nośnej
. Elementy segmentu naziemnego (1) 1.")
9 Elementy składowe GPS Segment kontroli, czyli stacje naziemne (1) Jest to rozmieszczony na kuli ziemskiej system naziemnych stacji monitorujących (sterujących i kontrolujących) funkcjonowanie satelitów (pod adresem GPS Master Control and Monitor Network znajduje się mapa tego segmentu). Elementy segmentu naziemnego (1) 1. Główne naziemne centrum GPS znajduje się w bazie sił powietrznych w stanie Colorado USA (tzw. Master Control Station); wysyła i odbiera sygnały ze wszystkich satelitów. Komputery pokładowe satelitów wyznaczają położenia satelitów (efemerydy) oraz poprawki czasu dla zegarów pokładowych (time offset). Stacja naziemna wysyła dane dotyczące położenia satelity oraz czasu do każdego satelity. Satelity przesyłają, drogą radiową, te dane (swoje aktualne położenie i czas) do odbiorników naziemnych GPS GPS Control Monitor
10 Elementy składowe GPS Elementy segmentu naziemnego (). Wspomagająca naziemna stacja kontrolna (Backup Master Control Station) zlokalizowana w stanie Maryland. 3. Cztery naziemne anteny zapewniające: stałą łączność pomiędzy centrum naziemnym a satelitami, śledzenie trajektorii satelitów, pomiary telemetryczne (zdalne). GPS Control Monitor TELEMETRIA dziedzina techniki (miernictwa i telekomunikacji) zajmująca się zdalnym mierzeniem wielkości fiz. i przekazywaniem (zwykle automatycznym) wyników tych pomiarów na odległość
11 Elementy składowe GPS Elementy segmentu naziemnego (3) 4. Sześć stacji monitorujących rozmieszczonych w pobliżu równika

 oraz czasu t są niezbędne sygnały pochodzące od 4")

 jest wykorzystywany w obserwatoriach astronomicznych,")
12 Elementy składowe GPS Segment użytkowników Składa się z odbiorników GPS i społeczności użytkowników. Odbiorniki GPS konwertują sygnały satelitarne na położenie, prędkość i czas. W celu wyznaczenia położenia (X,Y,Z) oraz czasu t są niezbędne sygnały pochodzące od 4 satelitów. Nawigacja to podstawowe zadanie GPS. Odbiorniki GPS wykorzystuje lotnictwo, statki, pojazdy naziemne oraz indywidualni użytkownicy. Dokładny czas (timing) jest wykorzystywany w obserwatoriach astronomicznych, telekomunikacji, w laboratoriach specjalistycznych (precyzyjne pomiary czasu i częstotliwości), do testowania teorii względności, monitorowania względnego ruchu fragmentów skorupy ziemskiej (kontynentów).
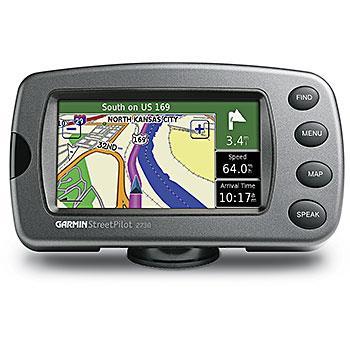

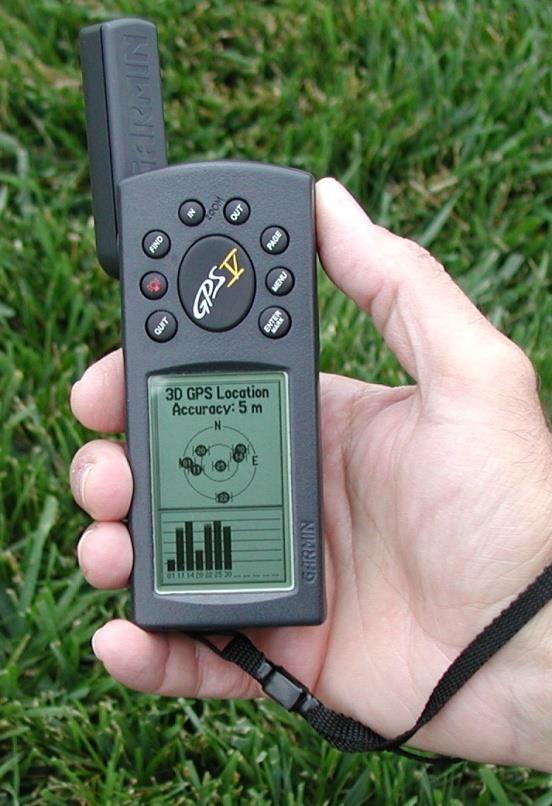


13 Odbiorniki GPS
14 Dokładność danych Niska dokładność Standardowa bezpłatna usługa pozycjonowania 100 metrów w kierunku poziomym 160 metrów w kierunku pionowym 340 nanosekund Większa dokładność Autoryzowani użytkownicy z odpowiednim sprzętem 10-0 metry w kierunku poziomym 30 metrów w kierunku pionowym 00 nanosekund
15 Użytkownicy Naukowcy, laboratoria naukowe, sportowcy, farmerzy (USA), żołnierze, piloci, ratownicy, turyści, kierowcy samochodów dostawczych i transportowych, firmy transportowe (dyspozytorzy), systemy penitencjarne, żeglarze, drwale, strażacy, geografowie, geodeci i inni używają odbiorników GPS, co zwiększa ich produktywność, czyni życie bezpieczniejszym i łatwiejszym.

16 Jak działa GPS? 1. Odbiornik GPS wyznacza odległość od satelity ze wzoru: ODLEGŁOŚĆ (DROGA) = PRĘDKOŚĆ CZAS. GPS odmierza i mierzy bardzo dokładnie CZAS. 3. GPS monitoruje trajektorie satelitów oraz wysyła informacje o ich parametrach; znajomość dokładnego położenia satelitów w przestrzeni jest niezbędna. 4. Trilateracja satelitarna pozwala wyznaczyć położenie obiektu na powierzchni Ziemi lub w jej przestrzeni okołoziemskiej 5. Wprowadzenie poprawek wynikających z położenia satelity oraz drogi przebywanej przez sygnał elektromagnetyczny w warstwach atmosfery
17 Tri(Cztero)lateracja w GPS. Jak wyznaczana jest odległość do satelity? Wyznaczanie odległości d 1, d, d 3 i d 4. d i = c t i, gdzie i = 1,, 3, 4. Czynnikami decydującymi o dokładności d 1, d, d 3 i d 4 są: 1. Pomiary czasów t 1, t, t 3 i t 4.. Znajomość prędkości rozchodzenia się fal elektromagnetycznych w atmosferze ziemskiej.
18 Tri(Cztero)lateracja w GPS
19 Tri(Cztero)lateracja w GPS Podsumowanie 1. Położenie obiektu jest wyznaczane na podstawie znajomości jego odległości od satelitów.. Konieczna jest dokładna znajomość położenia 4 satelitów.
 Satelita wysyła sygnały do odbiornika.")
20 Jak pozycjonuje GPS? Położenie odbiornika znajduje się w miejscu, w którym przecinają się 4 sfery o środkach w miejscu chwilowego położenia satelitów(intersection of Range Spheres) Satelita wysyła sygnały do odbiornika. Na ich podstawie odbiornik określa położenie satelitów w chwili wysłania sygnału. Co najmniej 4 satelity są potrzebne do określenia położenia odbiornika i czasu. Współrzędne położenia są określane w różnych układach odniesienia (Earth-Centered, Earth-Fixed X, Y, Z (ECEF XYZ) coordinates; ECEF X, Y, and Z Czas jest potrzebny do skorygowania czasu zegarów odbiornika, których dokładność jest niska (dlatego odbiorniki są względnie tanie) GPS SV and Receiver XYZ



21 Kwestią najważniejszą jest dokładny pomiar czasu. GPS wyznacza czas potrzebny na przebycie drogi od satelitów do odbiornika uwzględniając: małą dokładność zegara odbiornika; różne prędkości rozchodzenia się fal elektromagnetycznych w warstwach atmosfery, efekty relatywistyczne Dlaczego system GPS latającym Einsteinem jest? Korekty


22 Co jeszcze mierzy GPS? System wyznacza prędkość odbiornika: na podstawie zmiany jego położenia lub z wykorzystaniem efektu Dopplera zmiana częstości fali elektromagnetycznej wywołana ruchem obiektu. Każdy satelita jest wyposażony w 4 zegary atomowe: dwa cezowe i dwa rubidowe. Praca pokładowych zegarów atomowych jest monitorowana przez naziemne stacje.
23 Jak GPS wyznacza położenie? (1) Fizyczna zasada działania GPS Wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) R Z r i c T t, Z i gdzie i = 1,, 3, 4, t i oraz r i są czasem i położeniem i-tego satelity. Satelity przekazują do obiektu naziemnego położenia r i oraz czasy t i wysłania sygnału. Odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(t Z -t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę. Położenie (T Z,R Z ) wyznacza odbiornik GPS rozwiązując układ 4 powyższych równań względem 4 niewiadowych, tj. (T Z,R Z ), gdzie R Z jest wektorem.
24 Jak GPS wyznacza położenie? () Algorytm matematyczny wyznaczenie czasoprzestrzennego położenia obiektu na powierzchni Ziemi: (T Z,R Z ) na podstawie 4 sygnałów emitowanych z pokładów 4 satelitów GPS. Załóżmy, że obiekt o współrzędnych (T Z,R Z ) odbiera jednocześnie 4 sygnały wyemitowanych przez 4 satelity znajdujące się w położeniach: r 1, r, r 3, r 4 w chwilach czasu odpowiednio t 1, t, t 3 i t 4. Wtedy szukane położenie (T Z,R Z ) znajdujemy rozwiązując jednocześnie układ czterech równań R Z r i = c (T Z t i ) dla i=1,,3,4. Sygnały wysyłane przez satelity przekazują do obiektu naziemnego: położenie r i i-tego satelity, czas wysłania sygnału t i ; odbiornik GPS porównuje t i z czasem własnym i wyznacza odległość c(t-t i ) przebytą przez sygnał elektromagnetyczny wysłany przez satelitę.

")
25 Jak GPS wyznacza położenie? (3) Trilateracja
26 Czas ujęcie encyklopedyczne () Ogólna teoria względności opisuje związek czasoprzestrzeni z polem grawitacyjnym i rozkładem materii; zgodnie z tą teorią czas jest zależny od rozkładu materii; niezmienniczy, niezależny od wyboru układu odniesienia charakter mają nie odstępy czasu i odległości przestrzenne, ale odległości między zdarzeniami w czasoprzestrzeni.
27 Teoria względności i GPS () GPS odmierza czas z dokładnością sekundy na dobę! Co to praktycznie oznacza? Po upływie jednej doby zegary atomowe na pokładach satelitów muszą być korygowane z dokładnością do 4 nanosekund! Efekty przewidziane szczególną i ogólną teorią względności są rzędu setek i tysięcy nanosekund! Nie uwzględnienie tych efektów uczyniłoby GPS bezużytecznym!
28 Teoria względności i GPS (3) Efekty 1. Pole grawitacyjne wpływa na tempo upływu czasu zegary atomowe spóźniają lub spieszą się w zależności od ich odległości od źródła pola grawitacyjnego znajdującego się w środku Ziemi; praktycznie oznacza to istnienie efektu zwanego przesunięciem ku fioletowi częstości fal elektromagnetycznych emitowanych z satelity w kierunku powierzchni Ziemi (zegary na powierzchni Ziemi idą wolniej od satelitarnych; im bliżej centrum pola grawitacyjnego, tym wolniejszy upływ czasu); jest to efekt wynikający z przestrzennego położenia zegarów ziemskich i satelitarnych w polu grawitacyjnym
29 Teoria względności i GPS (4) Efekty. Dylatacja czasu zegary atomowe orbitalne i ziemskie są w ruchu względnym, co powoduje przesunięcie dopplerowskie częstości (zmianę częstości; tempo upływu czasu na zegarach ruchomych jest wolniejsze; zegary będące w ruchu spóźniają się względem zegarów spoczywających). 3. Efekt Sagnac a dobowy ruch obrotowy Ziemi oraz ruch orbitalny satelitów; wnosi błędy pomiaru czasu rzędu 00 nanoseknd na dobę. 4. Efekt grawitomagnetyczny dobowy obrót pola magnetycznego Ziemi, wpływa na tempo upływu czasu; poprawki są rzędu pikosekund na dobę, są do zaniedbania.
30 Teoria względności i GPS (5) Efekty zajmiemy się dalej oszacowaniem wpływu dwóch pierwszych (stacjonarnego pola grawitacyjnego oraz dylatacji czasu) na funkcjonowanie GPS, tj. pomiar czasu
31 Teoria względności i GPS (8) Jakiego rzędu są efekty relatywistyczne? Przesunięcie ku fioletowi oznacza, że zegar na orbicie spieszy się względem ziemnego (zegary na orbicie idą szybciej), bo f S /f Z =1 D<1. W ciągu doby różnica we wskazaniach zegarów osiąga t= ns =45,7 mikrosekund. W tym czasie światło przebywa odległość l = m 14 km.
32 Teoria względności i GPS (9) Jakiego rzędu są efekty relatywistyczne? Przesunięcie kinematyczne częstości w stronę czerwieni. Uwzględniamy ruch zegarów ziemskich i satelitarnych, 1 1 c v c v S Z S Z d d v S =3 874 m/s, v Z =465 m/s; (1-x) 1/ 1-x/, B v v c c v c v Z S S Z S Z d d gdzie B>0. Oznacza to, że stosunek częstości zegara na orbicie i na Ziemi wynosi f S /f Z =1 + B>1. Przesunięcie ku czerwieni! Zegary atomowe na orbicie spóźniają się!
33 Teoria względności i GPS (10) Jakiego rzędu są efekty relatywistyczne? Przesunięcie ku czerwieni powoduje, że zegar na orbicie spóźnia się względem ziemskiego (idzie wolniej), bo f S /f Z =1 + B>1. W ciągu doby różnica we wskazaniach zegarów osiąga t= ns =7,1 mikrosekundy. W tym czasie światło przebywa odległość l = 130 m km.
34 Teoria względności i GPS (11) Jakiego rzędu są wspomniane efekty relatywistyczne? d Z d S GM v Z v Z GM Z S 1 D B 1. R c c R c c 1 Z S Wypadkowa różnica czasu na zegarze ziemskich i satelitarnym (efekt przesunięcia częstości ku fioletowi i czerwieni) jest rzędu t= ns =39 mikrosekund. W rezultacie zegar atomowy na orbicie spieszy się względem ziemnego (idzie szybciej) o 39 mikrosekund na dobę. W tym czasie światło przebywa odległość l = m 1 km.
 oraz system referencyjnych stacji naziemnych, co umożliwia określenie położenia z")
35 Rozwój GPSu różnicowy GPS W celu udokładnienia pozycjonowania przez GPS wzbogacono go o tzw. różnicowy GPS (Differential GPS) oraz system referencyjnych stacji naziemnych, co umożliwia określenie położenia z dokładnością rzędu metrów!
36 Teoria względności i GPS Stwierdzenie końcowe GPS funkcjonuje m.in. wyłącznie i dzięki temu, że superdokładne pomiary czasu na odległych i ruchomych zegarach atomowych są w trybie ciągłym korygowane z uwzględnieniem przewidywań teorii względności Alberta Einsteina!
37 Dlaczego GPS latającym Einsteinem jest? Uzasadnienie tytułu wykładu 1. Czas nie jest wielkością absolutną.. Czas jest czwartą współrzędną. 3. Tempo upływu czasu zależy od: ruchu zegara, pola grawitacyjnego, ruchu obrotowego źródła pola grawitacyjnego Ziemi, ruchu obrotowego pola magnetycznego Ziemi. Są to idee A. Einsteina, które włączył do swoich teorii względności (szczególnej i ogólnej), a które zastosowano z powodzeniem przy projektowaniu i funkcjonowaniu GPS. Dlatego GPS latającym (nad nami) Einsteinem jest!!!!
38 Nowoczesny GPS XXI wieku SYPOR System POzycjonowania Relatywistecznego (GALILEO) Podsystem naziemnych stacji kontrolnych będzie przeniesiony w przestrzeń kosmiczną. Układem odniesienia (układem współrzędnych) będzie układ satelitów.
GPS Albert Einstein na orbicie okołoziemskiej
 GPS Albert Einstein na orbicie okołoziemskiej (GPS Global Positioning System) Włodzimierz Salejda, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/ XI DFN
GPS Albert Einstein na orbicie okołoziemskiej (GPS Global Positioning System) Włodzimierz Salejda, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl http://www.if.pwr.wroc.pl/~wsalejda/ XI DFN
Czy da się zastosować teorię względności do celów praktycznych?
 Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
Czy da się zastosować teorię względności do celów praktycznych? Witold Chmielowiec Centrum Fizyki Teoretycznej PAN IX Festiwal Nauki 24 września 2005 Mapa Ogólna Teoria Względności Szczególna Teoria Względności
(c) KSIS Politechnika Poznanska
 KSIS Politechnika Poznanska") Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
Wykład 5 Lokalizacja satelitarna 1 1 Katedra Sterowania i Inżynierii Systemów, Politechnika Poznańska 6 listopada 2011 Satelitarny system pozycjonowania wprowadzenie Charakterystyka systemu GPS NAVSTAR
GPS i teorie względności
 (GPS Global Positioning System) Włodzimierz Salejda, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl www.if.pwr.wroc.pl/~wsalejda/ XIII DFN 2010, Wrocław, 21 września 2010 Plan wykładu 1. Przesłania
(GPS Global Positioning System) Włodzimierz Salejda, Instytut Fizyki PWr e-mail: wlodzimierz.salejda@pwr.wroc.pl www.if.pwr.wroc.pl/~wsalejda/ XIII DFN 2010, Wrocław, 21 września 2010 Plan wykładu 1. Przesłania
Globalny Nawigacyjny System Satelitarny GLONASS. dr inż. Paweł Zalewski
 Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Globalny Nawigacyjny System Satelitarny GLONASS dr inż. Paweł Zalewski Wprowadzenie System GLONASS (Global Navigation Satellite System lub Globalnaja Nawigacjonnaja Sputnikowaja Sistiema) został zaprojektowany
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Systemy nawigacji satelitarnej Przemysław Bartczak Systemy nawigacji satelitarnej powinny spełniać następujące wymagania: system umożliwia określenie pozycji naziemnego użytkownika w każdym momencie, w
Podstawy fizyki wykład 9
 D. Halliday, R. Resnick, J.Walker: Podstawy Fizyki, tom 4, PWN, Warszawa 2003. H. D. Young, R. A. Freedman, Sear s & Zemansky s University Physics with Modern Physics, Addison-Wesley Publishing Company,
D. Halliday, R. Resnick, J.Walker: Podstawy Fizyki, tom 4, PWN, Warszawa 2003. H. D. Young, R. A. Freedman, Sear s & Zemansky s University Physics with Modern Physics, Addison-Wesley Publishing Company,
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu Wyznaczenie pozycji anteny odbiornika może odbywać się w dwojaki sposób: na zasadzie pomiarów
Systemy satelitarne wykorzystywane w nawigacji
 Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Systemy satelitarne wykorzystywane w nawigacji Transit System TRANSIT był pierwszym systemem satelitarnym o zasięgu globalnym. Navy Navigation Satellite System NNSS, stworzony i rozwijany w latach 1958-1962
Powierzchniowe systemy GNSS
 Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Systemy GNSS w pomiarach geodezyjnych 1/58 Powierzchniowe systemy GNSS Jarosław Bosy Instytut Geodezji i Geoinformatyki Uniwersytet Przyrodniczy we Wrocławiu e-mail: jaroslaw.bosy@up.wroc.pl Systemy GNSS
Nawigacja satelitarna
 Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
Paweł Kułakowski Nawigacja satelitarna Nawigacja satelitarna Plan wykładu : 1. Zadania systemów nawigacyjnych. Zasady wyznaczania pozycji 3. System GPS Navstar - architektura - zasady działania - dokładność
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI
 GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GNSS ROZWÓJ SATELITARNYCH METOD OBSERWACJI W GEODEZJI Dr inż. Marcin Szołucha Historia nawigacji satelitarnej 1940 W USA rozpoczęto prace nad systemem nawigacji dalekiego zasięgu- LORAN (Long Range Navigation);
GPS Global Positioning System budowa systemu
 GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
GPS Global Positioning System budowa systemu 1 Budowa systemu System GPS tworzą trzy segmenty: Kosmiczny konstelacja sztucznych satelitów Ziemi nadających informacje nawigacyjne, Kontrolny stacje nadzorujące
Kinematyka relatywistyczna
 Kinematyka relatywistyczna Fizyka I (B+C) Wykład V: Prędkość światła historia pomiarów doświadczenie Michelsona-Morleya prędkość graniczna Teoria względności Einsteina Dylatacja czasu Prędkość światła
Kinematyka relatywistyczna Fizyka I (B+C) Wykład V: Prędkość światła historia pomiarów doświadczenie Michelsona-Morleya prędkość graniczna Teoria względności Einsteina Dylatacja czasu Prędkość światła
Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
 Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
Planowanie inwestycji drogowych w Małopolsce w latach 2007-2013 Wykorzystanie nowoczesnych technologii w zarządzaniu drogami wojewódzkimi na przykładzie systemu zarządzania opartego na technologii GPS-GPRS.
1. Wstęp. 2. Budowa i zasada działania Łukasz Kowalewski
 01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
01.06.2012 Łukasz Kowalewski 1. Wstęp GPS NAVSTAR (ang. Global Positioning System NAVigation Signal Timing And Ranging) Układ Nawigacji Satelitarnej Określania Czasu i Odległości. Zaprojektowany i stworzony
Differential GPS. Zasada działania. dr inż. Stefan Jankowski
 Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Differential GPS Zasada działania dr inż. Stefan Jankowski s.jankowski@am.szczecin.pl DGPS koncepcja Podczas testów GPS na początku lat 80-tych wykazano, że błędy pozycji w dwóch blisko odbiornikach były
Kinematyka relatywistyczna
 Kinematyka relatywistyczna Fizyka I (B+C) Wykład VI: Prędkość światła historia pomiarów doświadczenie Michelsona-Morleya prędkość graniczna Teoria względności Einsteina Dylatacja czasu Prędkość światła
Kinematyka relatywistyczna Fizyka I (B+C) Wykład VI: Prędkość światła historia pomiarów doświadczenie Michelsona-Morleya prędkość graniczna Teoria względności Einsteina Dylatacja czasu Prędkość światła
FIZYKA 2. Janusz Andrzejewski
 FIZYKA 2 wykład 9 Janusz Andrzejewski Albert Einstein ur. 14 marca 1879 w Ulm, Niemcy, zm. 18 kwietnia 1955 w Princeton, USA) niemiecki fizyk żydowskiego pochodzenia, jeden z największych fizyków-teoretyków
FIZYKA 2 wykład 9 Janusz Andrzejewski Albert Einstein ur. 14 marca 1879 w Ulm, Niemcy, zm. 18 kwietnia 1955 w Princeton, USA) niemiecki fizyk żydowskiego pochodzenia, jeden z największych fizyków-teoretyków
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju. Acta Scientifica Academiae Ostroviensis nr 35-36,
 Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Milena Rykaczewska Systemy GNSS : stan obecny i perspektywy rozwoju Acta Scientifica Academiae Ostroviensis nr 35-36, 191-199 2011 A c t a Sc ie n t if ic a A c a D e m ia e O s t r o y ie n s is 191 Milena
Szczególna teoria względności
 Szczególna teoria względności Rakieta zbliża się do Ziemi z prędkością v i wysyła sygnały świetlne (ogólnie w postaci fali EM). Z jaką prędkością sygnały te docierają do Ziemi? 1. Jeżeli światło porusza
Szczególna teoria względności Rakieta zbliża się do Ziemi z prędkością v i wysyła sygnały świetlne (ogólnie w postaci fali EM). Z jaką prędkością sygnały te docierają do Ziemi? 1. Jeżeli światło porusza
Aplikacje Systemów. Nawigacja inercyjna. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
Aplikacje Systemów Wbudowanych Nawigacja inercyjna Gdańsk, 2016 Klasyfikacja systemów inercyjnych 2 Nawigacja inercyjna Podstawowymi blokami, wchodzącymi w skład systemów nawigacji inercyjnej (INS ang.
III.1 Ruch względny. III.1 Obserwacja położenia z dwóch różnych układów odniesienia. Pchnięcia (boosts) i obroty.metoda radarowa. Wykres Minkowskiego
 i obroty.metoda radarowa. Wykres Minkowskiego") III.1 Ruch względny III.1 Obserwacja położenia z dwóch różnych układów odniesienia. Pchnięcia (boosts) i obroty.metoda radarowa. Wykres Minkowskiego Jan Królikowski Fizyka IBC 1 III.1 Obserwacja położenia
III.1 Ruch względny III.1 Obserwacja położenia z dwóch różnych układów odniesienia. Pchnięcia (boosts) i obroty.metoda radarowa. Wykres Minkowskiego Jan Królikowski Fizyka IBC 1 III.1 Obserwacja położenia
GEOMATYKA program podstawowy. dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu
 GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
GEOMATYKA program podstawowy 2017 dr inż. Paweł Strzeliński Katedra Urządzania Lasu Wydział Leśny UP w Poznaniu W 1968 roku Departament Obrony USA podjął decyzję o połączeniu istniejących programów, w
przygtowała: Anna Stępniak, II rok DU Geoinformacji
 przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
przygtowała: Anna Stępniak, II rok DU Geoinformacji system nawigacji składa się z satelitów umieszczonych na orbitach okołoziemskich, kontrolnych stacji naziemnych oraz odbiorników satelity wysyłają sygnał
Czym zajmuje się teoria względności
 Teoria względności Czym zajmuje się teoria względności Głównym przedmiotem zainteresowania teorii względności są pomiary zdarzeń (czegoś, co się dzieje) ustalenia, gdzie i kiedy one zachodzą, a także jaka
Teoria względności Czym zajmuje się teoria względności Głównym przedmiotem zainteresowania teorii względności są pomiary zdarzeń (czegoś, co się dzieje) ustalenia, gdzie i kiedy one zachodzą, a także jaka
Systemy przyszłościowe. Global Navigation Satellite System Globalny System Nawigacji Satelitarnej
 Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Systemy przyszłościowe Global Navigation Satellite System Globalny System Nawigacji Satelitarnej 1 GNSS Dlaczego GNSS? Istniejące systemy satelitarne przeznaczone są do zastosowań wojskowych. Nie mają
Rozważania rozpoczniemy od fal elektromagnetycznych w próżni. Dla próżni równania Maxwella w tzw. postaci różniczkowej są następujące:
 Rozważania rozpoczniemy od fal elektromagnetycznych w próżni Dla próżni równania Maxwella w tzw postaci różniczkowej są następujące:, gdzie E oznacza pole elektryczne, B indukcję pola magnetycznego a i
Rozważania rozpoczniemy od fal elektromagnetycznych w próżni Dla próżni równania Maxwella w tzw postaci różniczkowej są następujące:, gdzie E oznacza pole elektryczne, B indukcję pola magnetycznego a i
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE
 WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
WSPÓŁCZESNE TECHNIKI I DANE OBSERWACYJNE TECHNIKI OBSERWACYJNE Obserwacje: - kierunkowe - odległości - prędkości OBSERWACJE KIERUNKOWE FOTOGRAFIA Metody fotograficzne używane były w 1964 do 1975. Dzięki
Postulaty szczególnej teorii względności
 Teoria Względności Pomiary co, gdzie, kiedy oraz w jakiej odległości w czasie i przestrzeni Transformowanie (przekształcanie) wyników pomiarów między poruszającymi się układami Szczególna teoria względności
Teoria Względności Pomiary co, gdzie, kiedy oraz w jakiej odległości w czasie i przestrzeni Transformowanie (przekształcanie) wyników pomiarów między poruszającymi się układami Szczególna teoria względności
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 6 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Równanie pseudoodległości odległość geometryczna satelity s s
Kinematyka relatywistyczna
 Kinematyka relatywistyczna Fizyka I (B+C) Wykład VIII: Paradoks bliźniat Relatywistyczny efekt Dopplera Przypomnienie Transformacja Lorenza dla różnicy współrzędnych dwóch wybranych zdarzeń A i B: t x
Kinematyka relatywistyczna Fizyka I (B+C) Wykład VIII: Paradoks bliźniat Relatywistyczny efekt Dopplera Przypomnienie Transformacja Lorenza dla różnicy współrzędnych dwóch wybranych zdarzeń A i B: t x
Precyzyjne pozycjonowanie w oparciu o GNSS
 Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Precyzyjne pozycjonowanie w oparciu o GNSS Załącznik nr 2 Rozdział 1 Techniki precyzyjnego pozycjonowania w oparciu o GNSS 1. Podczas wykonywania pomiarów geodezyjnych metodą precyzyjnego pozycjonowania
Naziemne systemy nawigacyjne. Wykorzystywane w nawigacji
 Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
Naziemne systemy nawigacyjne Wykorzystywane w nawigacji Systemy wykorzystujące radionamiary (CONSOL) Stacja systemu Consol składała się z trzech masztów antenowych umieszczonych w jednej linii w odległości
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 5 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Obserwacje fazowe satelitów GPS są tym rodzajem pomiarów, który
Sieci Satelitarne. Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl
 Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
Sieci Satelitarne Tomasz Kaszuba 2013 kaszubat@pjwstk.edu.pl Elementy systemu Moduł naziemny terminale abonenckie (ruchome lub stacjonarne), stacje bazowe (szkieletowa sieć naziemna), stacje kontrolne.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ
 GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ 27 Władysław Góral GLOBALNE SYSTEMY NAWIGACJI SATELITARNEJ Wprowadzenie W roku 2007 mija 50 lat od wprowadzenia na orbitę okołoziemską pierwszego sztucznego satelity.
(12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:
 TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) (96) Data i numer zgłoszenia patentu europejskiego:") PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
PL/EP 1887379 T3 RZECZPOSPOLITA POLSKA (12) TŁUMACZENIE PATENTU EUROPEJSKIEGO (19) PL (11) PL/EP 1887379 Urząd Patentowy Rzeczypospolitej Polskiej (96) Data i numer zgłoszenia patentu europejskiego: 04.07.2007
CZAS I PRZESTRZEŃ EINSTEINA. Szczególna teoria względności. Spotkanie I (luty, 2013)
") CZAS I PRZESTRZEŃ EINSTEINA Szczególna teoria względności Spotkanie I (luty, 2013) u Wyprowadzenie transformacji Lorentza u Relatywistyczna transformacja prędkości u Dylatacja czasu u Skrócenie długości
CZAS I PRZESTRZEŃ EINSTEINA Szczególna teoria względności Spotkanie I (luty, 2013) u Wyprowadzenie transformacji Lorentza u Relatywistyczna transformacja prędkości u Dylatacja czasu u Skrócenie długości
Efekt Dopplera. dr inż. Romuald Kędzierski
 Efekt Dopplera dr inż. Romuald Kędzierski Christian Andreas Doppler W 1843 roku opublikował swoją najważniejszą pracę O kolorowym świetle gwiazd podwójnych i niektórych innych ciałach niebieskich. Opisał
Efekt Dopplera dr inż. Romuald Kędzierski Christian Andreas Doppler W 1843 roku opublikował swoją najważniejszą pracę O kolorowym świetle gwiazd podwójnych i niektórych innych ciałach niebieskich. Opisał
Techniki różnicowe o podwyższonej dokładności pomiarów
 Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
Techniki różnicowe o podwyższonej dokładności pomiarów Adam Ciećko, Bartłomiej Oszczak adam.ciecko@uwm.edu.pl bartek@uw.pl Zastosowanie nowoczesnych satelitarnych metod pozycjonowania i nawigacji w rolnictwie
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS
 PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE
PORÓWNANIE PARAMETRÓW RUCHU PŁYT TEKTONICZNYCH WYZNACZONYCH NA PODSTAWIE STACJI WYKONUJĄCYCH POMIARY TECHNIKĄ LASEROWĄ I TECHNIKĄ DORIS Katarzyna Kraszewska, Marcin Jagoda, Miłosława Rutkowska STRESZCZENIE
14 POLE GRAWITACYJNE. Włodzimierz Wolczyński. Wzór Newtona. G- stała grawitacji 6, Natężenie pola grawitacyjnego.
 Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Włodzimierz Wolczyński 14 POLE GRAWITACYJNE Wzór Newtona M r m G- stała grawitacji Natężenie pola grawitacyjnego 6,67 10 jednostka [ N/kg] Przyspieszenie grawitacyjne jednostka [m/s 2 ] Praca w polu grawitacyjnym
Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS
 GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
GŁÓWNY URZĄD GEODEZJI I KARTOGRAFII Departament Geodezji, Kartografii i Systemów Informacji Geograficznej Podstawowe pojęcia związane z pomiarami satelitarnymi w systemie ASG-EUPOS Szymon Wajda główny
Problem testowania/wzorcowania instrumentów geodezyjnych
 Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Problem testowania/wzorcowania instrumentów geodezyjnych Realizacja Osnów Geodezyjnych a Problemy Geodynamiki Grybów, 25-27 września 2014 Ryszard Szpunar, Dominik Próchniewicz, Janusz Walo Politechnika
Ogólna teoria względności - wykład dla przyszłych uczonych, r. Albert Einstein
 W dobrej edukacji nie chodzi o wkuwanie wielu faktów, lecz o wdrożenie umysłu do myślenia Albert Einstein ELEMENTY OGÓLNEJ TEORII WZGLĘDNOŚCI Podstawa tej teorii zasada równoważności Zakrzywienie przestrzeni
W dobrej edukacji nie chodzi o wkuwanie wielu faktów, lecz o wdrożenie umysłu do myślenia Albert Einstein ELEMENTY OGÓLNEJ TEORII WZGLĘDNOŚCI Podstawa tej teorii zasada równoważności Zakrzywienie przestrzeni
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT. Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014
 Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Sensory i systemy pomiarowe Prezentacja Projektu SYNERIFT Michał Stempkowski Tomasz Tworek AiR semestr letni 2013-2014 SYNERIFT Tylne koła napędzane silnikiem spalinowym (2T typu pocket bike ) Przednie
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS
 Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
Ultra szybkie pozycjonowanie GNSS z zastosowaniem systemów GPS, GALILEO, EGNOS i WAAS Jacek Paziewski Paweł Wielgosz Katarzyna Stępniak Katedra Astronomii i Geodynamiki Uniwersytet Warmińsko Mazurski w
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI
 ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
ZAŁOŻENIA I STAN AKTUALNY REALIZACJI PROJEKTU ASG+ Figurski M., Bosy J., Krankowski A., Bogusz J., Kontny B., Wielgosz P. Realizacja grantu badawczo-rozwojowego własnego pt.: "Budowa modułów wspomagania
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4
 SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
SATELITARNE TECHNIKI POMIAROWE WYKŁAD 4 1 K. Czarnecki, Geodezja współczesna w zarysie, Wiedza i Życie/Gall, Warszawa 2000/Katowice 2010. 2 Można skorzystać z niepełnej analogii do pomiarów naziemnymi
Metody badania kosmosu
 Metody badania kosmosu Zakres widzialny Fale radiowe i mikrofale Promieniowanie wysokoenergetyczne Detektory cząstek Pomiar sił grawitacyjnych Obserwacje prehistoryczne Obserwatorium słoneczne w Goseck
Metody badania kosmosu Zakres widzialny Fale radiowe i mikrofale Promieniowanie wysokoenergetyczne Detektory cząstek Pomiar sił grawitacyjnych Obserwacje prehistoryczne Obserwatorium słoneczne w Goseck
Celem ćwiczenia jest badanie zjawiska Dopplera dla fal dźwiękowych oraz wykorzystanie tego zjawiska do wyznaczania prędkości dźwięku w powietrzu.
 Efekt Dopplera Cel ćwiczenia Celem ćwiczenia jest badanie zjawiska Dopplera dla fal dźwiękowych oraz wykorzystanie tego zjawiska do wyznaczania prędkości dźwięku w powietrzu. Wstęp Fale dźwiękowe Na czym
Efekt Dopplera Cel ćwiczenia Celem ćwiczenia jest badanie zjawiska Dopplera dla fal dźwiękowych oraz wykorzystanie tego zjawiska do wyznaczania prędkości dźwięku w powietrzu. Wstęp Fale dźwiękowe Na czym
Wykorzystanie systemu EGNOS w nawigacji lotniczej w aspekcie uruchomienia serwisu Safety-of-Life
 UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
UNIWERSYTET WARMIŃSKO-MAZURSKI w Olsztynie Wydział Geodezji i Gospodarki Przestrzennej Katedra Geodezji Satelitarnej i Nawigacji Wyższa Szkoła Oficerska Sił Powietrznych w Dęblinie Wykorzystanie systemu
Wykład 14. Technika GPS
 Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Wykład 14 Technika GPS Historia GPS Z teoretycznego punktu widzenia 1. W roku 1964, I. Smith opatentował pracę: Satelity emitują kod czasowy i fale radiowe, Na powierzchni ziemi odbiornik odbiera opóźnienie
Obszar badawczy i zadania geodezji satelitarnej
 Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
Obszar badawczy i zadania geodezji satelitarnej [na podstawie Seeber G., Satellite Geodesy ] dr inż. Paweł Zalewski Akademia Morska w Szczecinie cirm.am.szczecin.pl Literatura: 1. Januszewski J., Systemy
pobrano z serwisu Fizyka Dla Każdego - http://fizyka.dk - zadania fizyka, wzory fizyka, matura fizyka
 4. Pole grawitacyjne. Praca. Moc.Energia zadania z arkusza I 4.8 4.1 4.9 4.2 4.10 4.3 4.4 4.11 4.12 4.5 4.13 4.14 4.6 4.15 4.7 4.16 4.17 4. Pole grawitacyjne. Praca. Moc.Energia - 1 - 4.18 4.27 4.19 4.20
4. Pole grawitacyjne. Praca. Moc.Energia zadania z arkusza I 4.8 4.1 4.9 4.2 4.10 4.3 4.4 4.11 4.12 4.5 4.13 4.14 4.6 4.15 4.7 4.16 4.17 4. Pole grawitacyjne. Praca. Moc.Energia - 1 - 4.18 4.27 4.19 4.20
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Pojęcia podstawowe Punkt materialny Ciało, którego rozmiary można w danym zagadnieniu zaniedbać. Zazwyczaj przyjmujemy, że punkt materialny powinien być dostatecznie mały. Nie jest
Kinematyka: opis ruchu Pojęcia podstawowe Punkt materialny Ciało, którego rozmiary można w danym zagadnieniu zaniedbać. Zazwyczaj przyjmujemy, że punkt materialny powinien być dostatecznie mały. Nie jest
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej
 Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
Analiza dokładności modeli centrów fazowych anten odbiorników GPS dla potrzeb niwelacji satelitarnej Konferencja Komisji Geodezji Satelitarnej Komitetu Badań Kosmicznych i Satelitarnych PAN Satelitarne
PODSTAWOWE DANE SYSTEMU GPS
 NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
NAWIGACJA GNSS NAWIGACJA GNSS GNSS Global Navigation Satellite System jest to PODSTAWOWY sensor nawigacji obszarowej. Pojęcie to obejmuje nie tylko GPS NAVSTAR (pierwszy w pełni funkcjonujący globalny
Spis treści. Przedmowa PRZESTRZEŃ I CZAS W FIZYCE NEWTONOWSKIEJ ORAZ SZCZEGÓLNEJ TEORII. 1 Grawitacja 3. 2 Geometria jako fizyka 14
 Spis treści Przedmowa xi I PRZESTRZEŃ I CZAS W FIZYCE NEWTONOWSKIEJ ORAZ SZCZEGÓLNEJ TEORII WZGLĘDNOŚCI 1 1 Grawitacja 3 2 Geometria jako fizyka 14 2.1 Grawitacja to geometria 14 2.2 Geometria a doświadczenie
Spis treści Przedmowa xi I PRZESTRZEŃ I CZAS W FIZYCE NEWTONOWSKIEJ ORAZ SZCZEGÓLNEJ TEORII WZGLĘDNOŚCI 1 1 Grawitacja 3 2 Geometria jako fizyka 14 2.1 Grawitacja to geometria 14 2.2 Geometria a doświadczenie
Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy
 Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy 14. Kule (3 pkt) Dwie małe jednorodne kule A i B o jednakowych masach umieszczono w odległości 10 cm od siebie. Kule te oddziaływały wówczas
Egzamin maturalny z fizyki i astronomii 5 Poziom podstawowy 14. Kule (3 pkt) Dwie małe jednorodne kule A i B o jednakowych masach umieszczono w odległości 10 cm od siebie. Kule te oddziaływały wówczas
Grawitacja - powtórka
 Grawitacja - powtórka 1. Oceń prawdziwość każdego zdania. Zaznacz, jeśli zdanie jest prawdziwe, lub, jeśli jest A. Jednorodne pole grawitacyjne istniejące w obszarze sali lekcyjnej jest wycinkiem centralnego
Grawitacja - powtórka 1. Oceń prawdziwość każdego zdania. Zaznacz, jeśli zdanie jest prawdziwe, lub, jeśli jest A. Jednorodne pole grawitacyjne istniejące w obszarze sali lekcyjnej jest wycinkiem centralnego
Nawigacja satelitarna
 Nawigacja satelitarna Warszawa, 17 lutego 2015 Udział systemów nawigacji w wybranych działach gospodarki - aspekty bezpieczeństwa i ekonomiczne efekty Ewa Dyner Jelonkiewicz ewa.dyner@agtes.com.pl Tel.607459637
Nawigacja satelitarna Warszawa, 17 lutego 2015 Udział systemów nawigacji w wybranych działach gospodarki - aspekty bezpieczeństwa i ekonomiczne efekty Ewa Dyner Jelonkiewicz ewa.dyner@agtes.com.pl Tel.607459637
Od Harrisona do «Galileo»
 Od Harrisona do «Galileo» czyli europejski wkład w globalną nawigację ale również możliwości dla Polski Włodzimierz Lewandowski Międzynarodowe Biuro Miar Sèvres Warsztaty Galileo PRS, Warszawa, 20 listopada
Od Harrisona do «Galileo» czyli europejski wkład w globalną nawigację ale również możliwości dla Polski Włodzimierz Lewandowski Międzynarodowe Biuro Miar Sèvres Warsztaty Galileo PRS, Warszawa, 20 listopada
Janusz Śledziński. Technologie pomiarów GPS
 Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Janusz Śledziński Technologie pomiarów GPS GPS jest globalnym wojskowym systemem satelitarnym, a jego głównym użytkownikiem są siły zbrojne USA. Udostępniono go również cywilom, ale z pewnymi dość istotnymi
Kinematyka: opis ruchu
 Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Kinematyka: opis ruchu Wstęp do Fizyki I (B+C) Wykład III: Pojęcia podstawowe punkt materialny, układ odniesienia, układ współrzędnych tor, prędkość, przyspieszenie Ruch jednostajny Pojęcia podstawowe
Prawa ruchu: dynamika
 Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
Prawa ruchu: dynamika Fizyka I (B+C) Wykład X: Dynamika ruchu po okręgu siła dośrodkowa Prawa ruchu w układzie nieinercjalnym siły bezwładności Prawa ruchu w układzie obracajacym się siła odśrodkowa siła
Temat XXXIII. Szczególna Teoria Względności
 Temat XXXIII Szczególna Teoria Względności Metoda radiolokacyjna Niech w K znajduje się urządzenie nadawcze o okresie T, mierzonym w układzie K Niech K oddala się od K z prędkością v wzdłuż osi x i rejestruje
Temat XXXIII Szczególna Teoria Względności Metoda radiolokacyjna Niech w K znajduje się urządzenie nadawcze o okresie T, mierzonym w układzie K Niech K oddala się od K z prędkością v wzdłuż osi x i rejestruje
Elementy fizyki relatywistycznej
 Elementy fizyki relatywistycznej Transformacje Galileusza i ich konsekwencje Transformacje Lorentz'a skracanie przedmiotów w kierunku ruchu dylatacja czasu nowe składanie prędkości Szczególna teoria względności
Elementy fizyki relatywistycznej Transformacje Galileusza i ich konsekwencje Transformacje Lorentz'a skracanie przedmiotów w kierunku ruchu dylatacja czasu nowe składanie prędkości Szczególna teoria względności
4π 2 M = E e sin E G neu = sin z. i cos A i sin z i sin A i cos z i 1
 1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
1 Z jaką prędkością porusza się satelita na orbicie geostacjonarnej? 2 Wiedząc, że doba gwiazdowa na planecie X (stała grawitacyjna µ = 500 000 km 3 /s 2 ) trwa 24 godziny, oblicz promień orbity satelity
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO...
 Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Spis treści PRZEDMOWA DO WYDANIA PIERWSZEGO....................... XI 1. WPROWADZENIE DO GEODEZJI WYŻSZEJ..................... 1 Z historii geodezji........................................ 1 1.1. Kształt
Systemy nawigacji satelitarnej. Przemysław Bartczak
 Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Systemy nawigacji satelitarnej Przemysław Bartczak Zniekształcenia i zakłócenia Założenia twórców systemu GPS było, żeby pozycja użytkownika była z dokładnością 400-500 m. Tymczasem po uruchomieniu systemu
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS. Acta Scientifica Academiae Ostroviensis nr 30, 19-32
 Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Patrycja Kryj Ogólne zasady funkcjonowania Globalnego Systemu Pozycyjnego GPS Acta Scientifica Academiae Ostroviensis nr 30, 19-32 2008 Ogólne Zasady Funkcjonowania Globalnego Systemu Pozycyjnego GPS 19
Metody Optyczne w Technice. Wykład 5 Interferometria laserowa
 Metody Optyczne w Technice Wykład 5 nterferometria laserowa Promieniowanie laserowe Wiązka monochromatyczna Duża koherencja przestrzenna i czasowa Niewielka rozbieżność wiązki Duża moc Największa możliwa
Metody Optyczne w Technice Wykład 5 nterferometria laserowa Promieniowanie laserowe Wiązka monochromatyczna Duża koherencja przestrzenna i czasowa Niewielka rozbieżność wiązki Duża moc Największa możliwa
XXXV. TEORIA WZGLĘDNOŚCI
 XXXV. TEORIA WZGLĘDNOŚCI 35.1. Równoczesność i dylatacja czasu Teoria względności zajmuje się pomiarami zdarzeń, gdzie i kiedy zdarzenia zachodzą oraz odległością tych zdarzeń w czasie i przestrzeni. Ponadto
XXXV. TEORIA WZGLĘDNOŚCI 35.1. Równoczesność i dylatacja czasu Teoria względności zajmuje się pomiarami zdarzeń, gdzie i kiedy zdarzenia zachodzą oraz odległością tych zdarzeń w czasie i przestrzeni. Ponadto
Sztuczny satelita Ziemi. Ruch w polu grawitacyjnym
 Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
Sztuczny satelita Ziemi Ruch w polu grawitacyjnym Sztuczny satelita Ziemi Jest to obiekt, któremu na pewnej wysokości nad powierzchnią Ziemi nadano prędkość wystarczającą do uzyskania przez niego ruchu
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia.
 Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Praca domowa nr 2. Kinematyka. Dynamika. Nieinercjalne układy odniesienia. Grupa 1. Kinematyka 1. W ciągu dwóch sekund od wystrzelenia z powierzchni ziemi pocisk przemieścił się o 40 m w poziomie i o 53
Moduły ultraszybkiego pozycjonowania GNSS
 BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
BUDOWA MODUŁÓW WSPOMAGANIA SERWISÓW CZASU RZECZYWISTEGO SYSTEMU ASG-EUPOS Projekt rozwojowy MNiSW nr NR09-0010-10/2010 Moduły ultraszybkiego pozycjonowania GNSS Paweł Wielgosz Jacek Paziewski Katarzyna
Cospa Cos s pa - Sa - Sa a rs t
 Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
Od 1982 r. system centrów koordynacji ratownictwa Re Center (RCC), punktów kontaktowyc Rescue Points Of Contacts (SPOC) i koordynacji. satelity na orbitach geo tworzące system GEOSA przeszkody mogące
Geodezja i Kartografia I stopień (I stopień / II stopień) ogólnoakademicki (ogólno akademicki / praktyczny)
 ogólnoakademicki (ogólno akademicki / praktyczny)") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Systemy pozycjonowania i nawigacji Nazwa modułu w języku angielskim Navigation
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.
 Zastosowanie systemu nawigacyjnego w pomiarach geometrii elementów maszyn. Ćwiczenie 22.") Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
Badania elementów i zespołów maszyn laboratorium (MMM4035L) Ćwiczenie 22. Zastosowanie systemu nawigacyjnego w pomiarach geometrii Przygotowanie: Ewelina Świątek-Najwer Wstęp teoretyczny: Rodzaje systemów
Nie tylko GPS. Nie tylko GPS. Wydział Fizyki i Astronomii Uniwersytetu Zielonogórskiego. WFiA UZ 1 / 34
 Nie tylko GPS Wydział Fizyki i Astronomii Uniwersytetu Zielonogórskiego WFiA UZ 1 / 34 Satelity Satelitą nazywamy ciało niebieskie krążące wokół planety (np. Ziemi) o masie o wiele mniejszej od masy planety.
Nie tylko GPS Wydział Fizyki i Astronomii Uniwersytetu Zielonogórskiego WFiA UZ 1 / 34 Satelity Satelitą nazywamy ciało niebieskie krążące wokół planety (np. Ziemi) o masie o wiele mniejszej od masy planety.
Aplikacje Systemów. 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS. Gdańsk, 2015
 Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów Wbudowanych 1. System zarządzania flotą pojazdów 2. Nawigacja samochodowa GPS Gdańsk, 2015 Schemat systemu SpyBox Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik
Aplikacje Systemów. System zarządzania flotą pojazdów Nawigacja samochodowa GPS. Gdańsk, 2016
 Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Aplikacje Systemów Wbudowanych System zarządzania flotą pojazdów Nawigacja samochodowa GPS Gdańsk, 2016 Schemat systemu SpyBox 2 Komponenty systemu SpyBox Urządzenie do lokalizacji pojazdów Odbiornik sygnału
Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy.
 Współrzędne geograficzne Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy. Najbardziej wiernym modelem Ziemi ukazującym ją w bardzo dużym
Współrzędne geograficzne Istnieje wiele sposobów przedstawiania obrazów Ziemi lub jej fragmentów, należą do nich plany, mapy oraz globusy. Najbardziej wiernym modelem Ziemi ukazującym ją w bardzo dużym
Dwa podstawowe układy współrzędnych: prostokątny i sferyczny
 Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
Lokalizacja ++ Dwa podstawowe układy współrzędnych: prostokątny i sferyczny r promień wodzący geocentrycznych współrzędnych prostokątnych //pl.wikipedia.org/ system geograficzny i matematyczny (w geograficznym
(12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1
 OPIS PATENTOWY (19) PL (11) 180337 (13) B1") RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
RZECZPOSPOLITA POLSKA (12) OPIS PATENTOWY (19) PL (11) 180337 (13) B1 Urząd Patentowy Rzeczypospolitej Polskiej (21) Numer zgłoszenia: 319308 (22) Data zgłoszenia: 06.09.1995 (86) Data i numer zgłoszenia
ODORYMETRIA. Joanna Kośmider. Ćwiczenia laboratoryjne i obliczenia. Część I ĆWICZENIA LABORATORYJNE. Ćwiczenie 1 POMIARY EMISJI ODORANTÓW
 Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Joanna Kośmider ODORYMETRIA Ćwiczenia laboratoryjne i obliczenia Część I ĆWICZENIA LABORATORYJNE Ćwiczenie 1 POMIARY EMISJI ODORANTÓW Ćwiczenie 2 PROGNOZOWANIE ZASIĘGU ZAPACHOWEJ UCIĄŻLIWOŚCI EMITORÓW
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS)
") Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Sieciowe Pozycjonowanie RTK używając Virtual Reference Stations (VRS) Mgr inż. Robert Dudek GEOTRONICS KRAKÓW GSI Japan - 21st of June 1999 Wprowadzenie u Dlaczego Sieci stacji referencyjnych GPS? u Pomysł
Podstawy fizyki sezon 1 VII. Pole grawitacyjne*
 Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
Podstawy fizyki sezon 1 VII. Pole grawitacyjne* Agnieszka Obłąkowska-Mucha WFIiS, Katedra Oddziaływań i Detekcji Cząstek, D11, pok. 111 amucha@agh.edu.pl http://home.agh.edu.pl/~amucha * Resnick, Halliday,
FIZYKA Podręcznik: Fizyka i astronomia dla każdego pod red. Barbary Sagnowskiej, wyd. ZamKor.
 DKOS-5002-2\04 Anna Basza-Szuland FIZYKA Podręcznik: Fizyka i astronomia dla każdego pod red. Barbary Sagnowskiej, wyd. ZamKor. WYMAGANIA NA OCENĘ DOPUSZCZAJĄCĄ DLA REALIZOWANYCH TREŚCI PROGRAMOWYCH Kinematyka
DKOS-5002-2\04 Anna Basza-Szuland FIZYKA Podręcznik: Fizyka i astronomia dla każdego pod red. Barbary Sagnowskiej, wyd. ZamKor. WYMAGANIA NA OCENĘ DOPUSZCZAJĄCĄ DLA REALIZOWANYCH TREŚCI PROGRAMOWYCH Kinematyka
TEMATYKA PRAC DYPLOMOWYCH INŻYNIERSKICH STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12
 STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
STUDIA STACJONARNE PIERWSZEGO STOPNIA ROK AKADEMICKI 2011/12 Jednostka: KATEDRA GEODEZJI SATELITARNEJ I NAWIGACJI Specjalność: GEODEZJA I GEOINFORMATYKA Prof. dr hab. inż. Stanisław 1. Wyznaczenie dokładności
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku
 kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
kpt. Mirosław Matusik Brzeźnica, dnia 24.02.2012 roku GPS Global Positioning System System Globalnej Lokalizacji Satelitarnej System GPS zrewolucjonizował nawigację lądową, morską, lotniczą a nawet kosmiczną.
PRZETWARZANIE TRIMBLE HD-GNSS
 PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
PRZETWARZANIE TRIMBLE HD-GNSS BIAŁA KSIĘGA TRIMBLE SURVEY DIVISION WESTMINSTER, COLORADO, USA Wrzesień 2012 STRESZCZENIE Przetwarzanie kodowe GNSS uległo znacznej poprawie w porównaniu z pierwszymi algorytmami
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i
 Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
Geotronics Polska jako dostawca nowoczesnych technologii satelitarnych GNSS firmy Trimble do zastosowań pomiarowych, infrastrukturalnych i monitoringowych. GEOTRONICS POLSKA Sp. z o.o. Jedyny dystrybutor
Pomiary GPS RTK (Real Time Kinematic)
") Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Geomatyka RTK Pomiary GPS RTK (Real Time Kinematic) Metoda pomiaru kinetycznego RTK jest metodą różnicową stosującą poprawkę na przesunięcie fazowe GPS do wyliczenia współrzędnych z centymetrową dokładnością.
Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi. Ewa Dyner Jelonkiewicz. ewa.dyner@agtes.com.pl Tel.
 TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
TELEKOMUNIKACJA SATELITARNA-GOSPODARCZE I STRATEGICZNE KORZYŚCI DLA ADMINISTRACJI PUBLICZNEJ Warszawa, 12 grudnia 2014 Znaczenie telekomunikacji we współdziałaniu z systemami nawigacyjnymi Ewa Dyner Jelonkiewicz
NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ
 aut. Maksymilian Dura 25.10.2015 NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ Rosyjska armia chwali się wprowadzaniem do sił zbrojnych nowych systemów uzbrojenia, wliczając w to nie tylko nowe samoloty
aut. Maksymilian Dura 25.10.2015 NOWE SYSTEMY ELEKTRONICZNE ARMII ROSYJSKIEJ Rosyjska armia chwali się wprowadzaniem do sił zbrojnych nowych systemów uzbrojenia, wliczając w to nie tylko nowe samoloty
 *jp"
*jp"