Programowanie robotów Kuka
|
|
|
- Dawid Szczepaniak
- 7 lat temu
- Przeglądów:
Transkrypt


1 Wersje szafy sterowniczej KRC1 Programowanie robotów Kuka KRC2 Istnieje możliwość podłączenia myszy do portu COM1. Jednak aplikacje i funkcje, które z tego portu korzystają muszą zostać przełączone na inny port COM Drzwi do szafy mogą być otwierane jedynie na krótki okres czasu ze względu na: możliwość dostania się kurzu i pyłu zakłócenie obiegu powierza i możliwość przegrzania


2 KRC3 Włączanie i wyłączanie robota Podczas ładowanie oprogramowania sterującego należy zwrócić uwagę na komunikaty o błędach. Gdy dane maszynowe są niezgodne z typem robota, nie wolno ruszać robotem. Podczas wyłączania robota dane konfiguracyjne są zapisywane do plików dyskowych. W przypadku niewystarczającego naładowania baterii podtrzymujących, może nastąpić nieprawidłowy zapis lub brak zapisu danych (mastering data).
3 Cold start nie jest ładowany żaden program. W trybie AUT EXT ładowany jest program CELL. Warm start stosowany, aby ograniczyć przerwy w produkcji spowodowane zanikiem zasilania. Ładowany jest program i ustawiana jest ostatnia pozycja. Przed wznowieniem działania programu, należy sprawdzić stan robota i urządzeń peryferyjnych. Wszystkie urządzenia peryferyjne muszą być tak projektowane, aby nie wykonywały nieprzewidzianych ruchów podczas włączania i wyłączania zasilania. Rodzaj startu po zaniku zasilania ustawiany jest w menu (zalecany jest cold start): Configure --> On/Off options --> Force cold Startup Grupy użytkowników USER uruchamianie systemu (kalibracja, pomiar narzędzia), proste programy robocze, (programowanie przez formularze dołączone, komendy ruchów, komendy technologiczne, kontrola wartości granicznych) EXPERT możliwe przełączenie to trybu Windows, uzupełnienie programowania w języku KRL, złożone programy robocze (podprogramy, programowanie przerwań pętle, rozgałęzienia programów), numeryczne programowanie ruchów. ADMINISTRATOR projektowanie układu sterowania robota (osie dodatkowe, pakiety technologiczne), własne komendy technologiczne za pośrednictwem pakietów dodatkowego oprogramowania np. UserTECH)
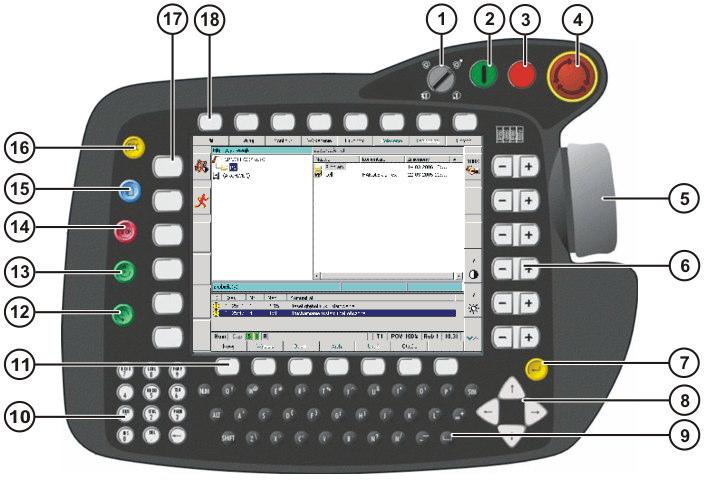
4 Programator KCP


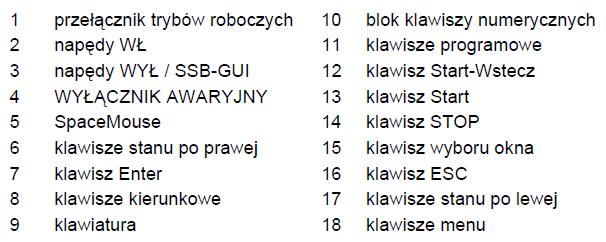
5 Interfejs graficzny

6 Podział interfejsu graficznego

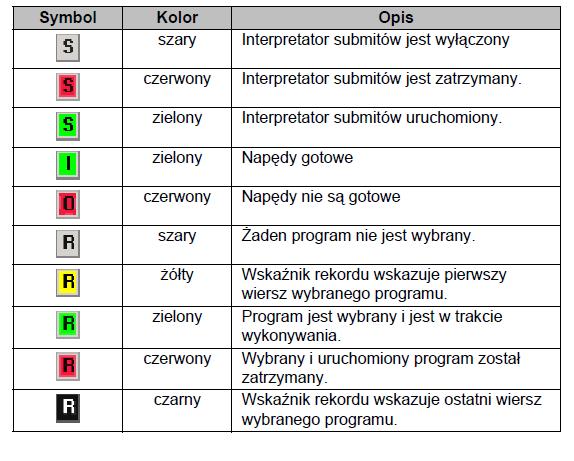
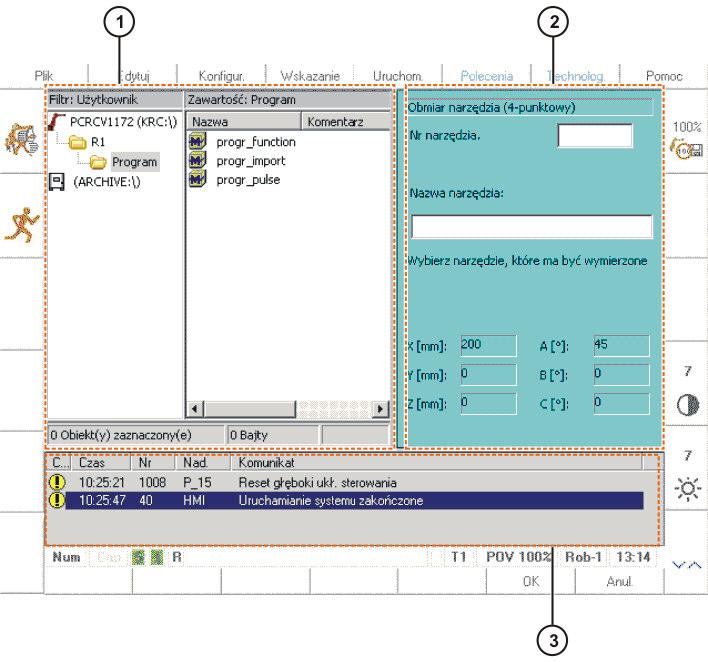
7 Pasek statusu




8 Układy współrzędnych Ustawienie prędkości Hand-Override (HOV) w procentach względem maksymalnej prędkości 250mm/s Ręczne przesuwanie robota w odniesieniu do osi robota kartezjańskie
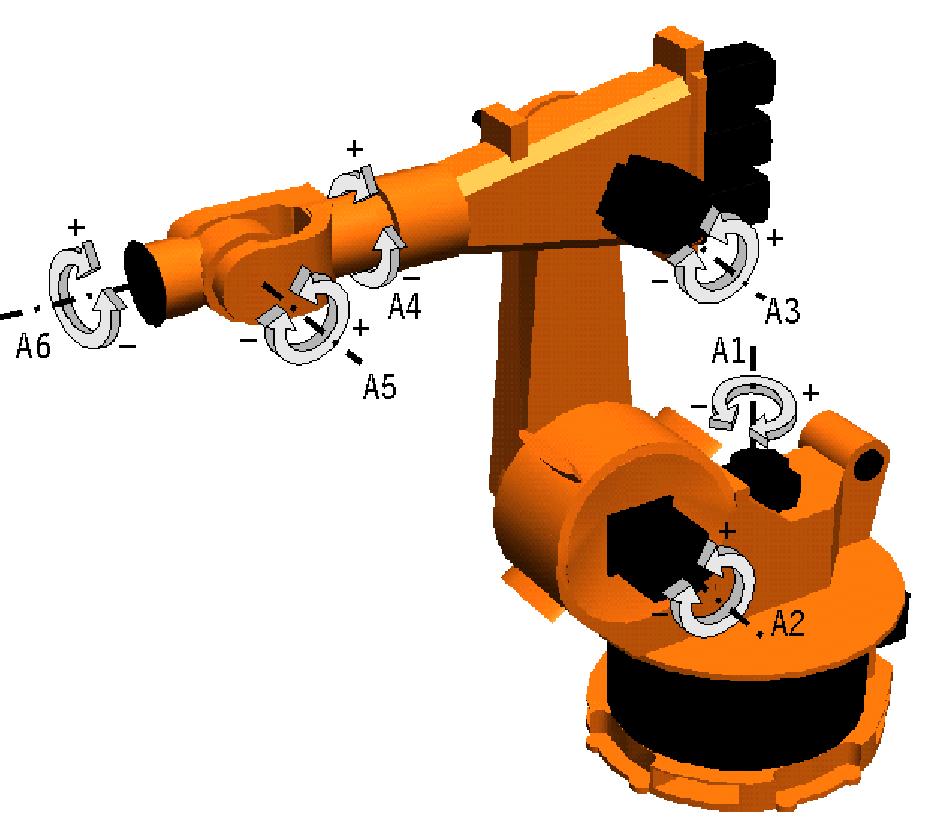






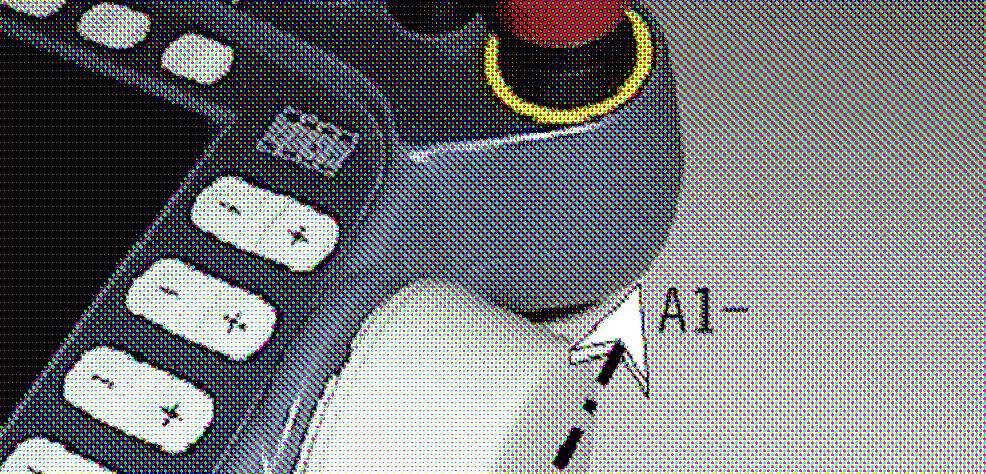
9 Wybór sterowanych osi Przesuwanie w odniesieniu do osi robota














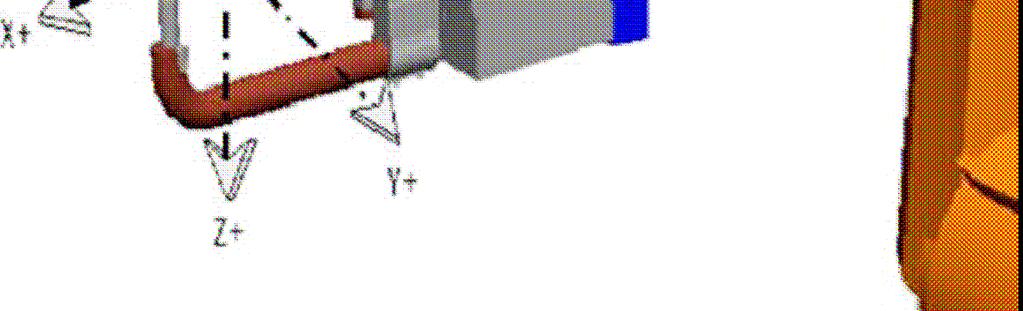
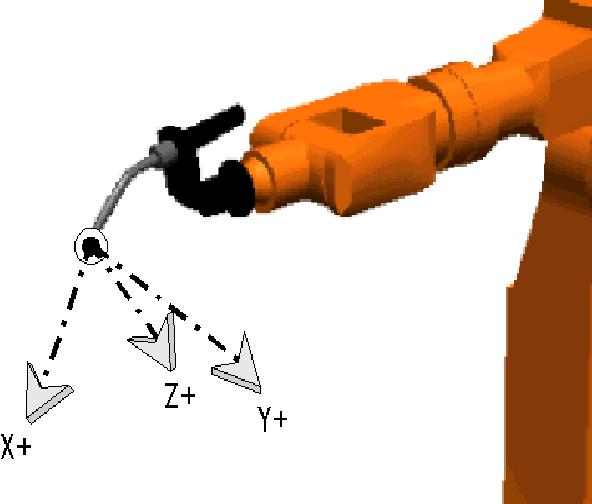
10 Przesuwanie w układach kartezjańskich WORLD BASE TOOLS


















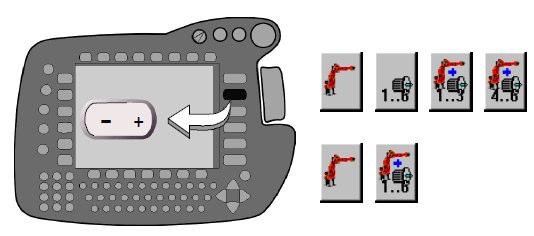
11 Pozycja operatora Konfiguracja Space Mouse Liczba stopni swobody Wybór osi dominującej
12 Sterowanie przyrostowe


13 Osobliwości W pobliżu konfiguracji osobliwej niewielkie zmiany we współrzędnych zewnętrznych powodują duże zmiany wartości kątowych osi, co łączy się z dużymi prędkościami osi robota. W konfiguracji osobliwej niemożliwe jest wyznaczenie zadania odwrotnego kinematyki lub jest ono niejednoznaczne. Osobliwość pułapowa Pozycja wyprostowana

 sterownik robota zgłosi")
14 Osobliwość osi kiści Jeżeli w punkcie końcowym ruchu PTP oś A5 przyjmie wartość ( < A5< ) sterownik robota zgłosi pozycję osobliwą


15 Monitorowanie Współrzędnych Ustawienia Przyrosty przy ustawieniach prędkości 1% lub 1, 3, 10, 30, 50, 75, 100 prędkości w trybie ręcznym Położenie i konfiguracja myszy

.")
. Po wymianie przekładni.")


16 Kalibracja (mastering / unmastering) Robot ustawiany jest w mechanicznym punkcie zerowym i zapisywane są wartości bezwzględne dla każdej z osi. Robot musi być kalibrowany w następujących przypadkach: Przy uruchomieniu. Po naprawie (np. po wymianie silnika lub RDW). Gdy robot został poruszony przy wyłączonym układzie sterowania (np. przy pomocy mechanizmu swobodnego obrotu). Po wymianie przekładni. Po najechaniu mechanicznego ogranicznika końcowego z prędkością większą niż 250mm/s. Po kolizji. Przed nowym skalibrowaniem należy skasować dane dotyczące starej kalibracji! Dostępne są 2 metody kalibrowania robota: Przy pomocy EMT (electronic measuring tool) Przy pomocy czujnika zegarowego (dial gauge) Zaleca się kalibrację przy pomocy EMT Kalibracja powinna być dokonywana stale w tej samej temperaturze.



17 Kalibracja przy pomocy czujnika zegarowego Wszystkie osie muszą być ustawione w pozycji przedkalibracyjnej (Należy zwrócić uwagę, czy osie A4 i A6 nie zostały przekręcone)



18 Kalibracja musi być przeprowadzona w kolejności od 1 do 6 osi Prędkość powinna być ustawiona na 1% Ruch z pozycji przedkalibracyjne odbywa się zawsze w kierunku (ujemnym) Po wstępnym ustawieniu pozycji zerowej należy przejść do trybu inkrementalnego i powtórzyć kalibrację Kalibracja przeprowadzana jest zawsze z obciążeniem Kalibracja przy pomocy czujnika EMT Wszystkie osie muszą być ustawione w pozycji przedkalibracyjnej Robot jest bez obciążenia Przykręcenie czujnika


19 Uwaga! EMT należy przykręcać do wypustu pomiarowego lub usunąć z wypustu zawsze bez przewodu pomiarowego. W przeciwnym razie przewód pomiarowy może ulec uszkodzeniu. Wybieramy opcję Standard jeżeli robot jest bez obciążenia lub ze stałym obciążeniem Wciśnij przycisk Master, przycisk zatwierdzający i przycisk Start. Operację należy powtórzyć dla wszystkich osi. Kalibracja z obciążeniem Najpierw kalibracja bez obciążenia Następnie z obciążeniem zapisana zostaje różnica względem kal. bez obciążenia. Można zapamiętać kilka obciążeń. Dekalibracja robota Ostrzeżenie! Jeśli robot jest zdekalibrowany, programowane wyłączniki krańcowe nie są aktywne. Robot może uderzyć o bufory na ogranicznikach krańcowych, przez co może uszkodzić się a bufory będzie trzeba wymienić. Zdekalibrowany robot nie powinien być w miarę możliwości wprawiany w ruch lub należy maksymalnie zredukować HOV.






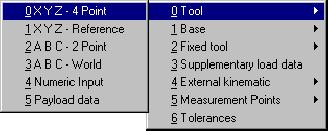
20 Pomiar narzędzia





21 Metoda 4-punktowa XYZ


22 Metoda referencyjny XYZ
23 Metoda ABC World Osie układu współrzędnych TOOL są ustawione równolegle do osi układu współrzędnych WORLD. W ten sposób układ sterowania robota poznaje orientację układu współrzędnych TOOL. Metoda posiada 2 warianty: 5D: Układowi sterowania podawany jest jedynie kierunek uderzenia narzędzia. Kierunkiem uderzenia jest domyślnie oś X. Kierunek innych osi określany jest przez system i jest trudny dla użytkownika do rozpoznania. Zakres zastosowania: np. spawanie MIG/MAG, cięcie wiązką laserową lub strumieniem wody 6D: Układowi sterowania podawany jest kierunek wszystkich trzech osi. Zakres zastosowania: np. dla zgrzewadeł kleszczowych, chwytaków lub dysz klejowych






24 Metoda 2-punktowa ABC Układowi sterowania robota podawane są osie układu współrzędnych TOOL poprzez najechanie na dowolny punkt na osi X oraz na dowolny punkt w płaszczyźnie XY. Metoda ta jest stosowana, gdy konieczne jest szczególnie dokładne określenie kierunków osi. Wprowadzanie danych numerycznych Parametry narzędzia mogą być wprowadzane ręcznie. A, B, C Kąty Eulera Rot Z, Rot Y, Rot X







25 Pomiar podstawy Podczas opomiarowywania podstawy użytkownik przypisuje danej powierzchni roboczej lub obrabianemu elementowi kartezjański układ współrzędnych (BASE). Układ współrzędnych BASE ma swój początek w punkcie określonym przez użytkownika. Metoda 3-punktowa

26 Metoda pośrednia Metoda pośrednia jest stosowana, jeśli nie jest możliwe najechanie punktu początkowego bazy, np. gdy jest on położony we wnętrzu elementu obrabianego lub poza zakresem roboczym robota. Metoda polega na najechaniu 4 punktów podstawy, których współrzędne są znane względem układu współrzędnych BASE. Wprowadzanie danych numerycznych Znane są następujące parametry numeryczne, np. z CAD: Odległość punktu początkowego podstawy od punktu początkowego układu współrzędnych WORLD Kąt obrócenia osi bazy w stosunku do układu współrzędnych WORLD








27 Pomiar zewnętrznego TCP Należy podać położenie i orientację zewnętrznego TCP







28 Pomiar elementu obrabianego: Metoda bezpośrednia Układowi sterowania robota podawany jest punkt początkowy oraz 2 inne punkty elementu obrabianego.




29 Pomiar elementu obrabianego: Metoda pośrednia Układ sterowania robota oblicza element obrabiany na podstawie 4 punktów, których współrzędne muszą być znane. Punkt początkowy elementu obrabianego nie jest najeżdżany.


30 Dane obciążenia Dane obciążenia wykorzystywane są podczas obliczania toru i przyspieszeń i przyczyniają się do optymalizacji czasów taktu. Dane obciążenia muszą być wprowadzone do układu sterowania robota. Ostrzeżenie! Używanie robota z błędnymi danymi obciążenia lub z obciążeniami, do których nie jest on przystosowany, prowadzi do uszkodzenia systemu robota. Sprawdzanie danych obciążenia Wykres obciążenia Program KUKA.Load
31 Wprowadzanie danych obciążenia Wprowadzanie danych dodatkowego obciążenia
Sterownik KR C4(8.x)
") Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
1 Zasady bezpieczeństwa
 1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
1 Zasady bezpieczeństwa W trakcie trwania zajęć laboratoryjnych ze względów bezpieczeństwa nie należy przebywać w strefie działania robota, która oddzielona jest od pozostałej części laboratorium barierkami.
Laboratorium Podstaw Robotyki ĆWICZENIE 2
 Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KUKA KR30 Celem ćwiczenia jest zapoznanie ze strukturą
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KUKA KR30 Celem ćwiczenia jest zapoznanie ze strukturą
Instrukcja ręcznej konfiguracji połączenia z Internetem przez. modem ED77 w systemie Windows XP
 Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows XP wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia. W
Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows XP wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia. W
Rys. 18a). Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.
. Okno kalibracji robotów, b)wybór osi robota, która wymaga kalibracji.") kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
kalibracja robotów może się przyczynić do awarii maszyn, co jest bardzo kosztowne i wymaga długich napraw, a więc i zatrzymania produkcji. Opis technik kalibracji został opracowany w oparciu o podręcznik
Instrukcja użytkownika ARsoft-CFG WZ1 4.0
 05-090 Raszyn, ul Gałczyńskiego 6 tel. (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARsoft-CFG WZ1 4.0 wersja 4.0 www.apar.pl 1 1. Opis Aplikacja ARsoft-CFG umożliwia
05-090 Raszyn, ul Gałczyńskiego 6 tel. (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARsoft-CFG WZ1 4.0 wersja 4.0 www.apar.pl 1 1. Opis Aplikacja ARsoft-CFG umożliwia
Sterownik KR C4(8.x)
") Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
1. Opis. 2. Wymagania sprzętowe:
 1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
1. Opis Aplikacja ARSOFT-WZ2 umożliwia konfigurację, wizualizację i rejestrację danych pomiarowych urządzeń produkcji APAR wyposażonych w interfejs komunikacyjny RS232/485 oraz protokół MODBUS-RTU. Aktualny
Laboratorium Podstaw Robotyki ĆWICZENIE 2
 Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KR AGILUS Celem ćwiczenia jest zapoznanie ze strukturą
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KR AGILUS Celem ćwiczenia jest zapoznanie ze strukturą
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0
 Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Mikroprocesorowy termostat elektroniczny RTSZ-71v2.0 Instrukcja obsługi Wrzesień 2014 Szkoper Elektronik Strona 1 2014-09-29 1 Parametry techniczne: Cyfrowy pomiar temperatury w zakresie od -40 C do 120
Laboratorium Maszyny CNC. Nr 4
 1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
1 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Maszyny CNC Nr 4 Obróbka na frezarce CNC Opracował: Dr inż. Wojciech Ptaszyński Poznań, 03 stycznia 2011 2 1. Cel ćwiczenia Celem
Program APEK Użytkownik Instrukcja użytkownika
 Program APEK Użytkownik Instrukcja użytkownika http://www.apek.pl e-mail. Biuro@apek.pl tel. 022 6447970 Systemy monitorowania programem APEK Użytkownik. 1.1 Wiadomości wstępne: Podgląd danych i ustawianie.
Program APEK Użytkownik Instrukcja użytkownika http://www.apek.pl e-mail. Biuro@apek.pl tel. 022 6447970 Systemy monitorowania programem APEK Użytkownik. 1.1 Wiadomości wstępne: Podgląd danych i ustawianie.
54. Układy współrzędnych
 54 54. Układy współrzędnych Współrzędne punktów i dostępne układy współrzędnych na płaszczyźnie (2D) omówiono w rozdziale 8. Współrzędne 2D. W tym rozdziale podane zostaną informacje dodatkowe konieczne
54 54. Układy współrzędnych Współrzędne punktów i dostępne układy współrzędnych na płaszczyźnie (2D) omówiono w rozdziale 8. Współrzędne 2D. W tym rozdziale podane zostaną informacje dodatkowe konieczne
Kalibracja robotów przemysłowych
 Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Instrukcja użytkownika ARSoft-WZ1
 05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
05-090 Raszyn, ul Gałczyńskiego 6 tel (+48) 22 101-27-31, 22 853-48-56 automatyka@apar.pl www.apar.pl Instrukcja użytkownika ARSoft-WZ1 wersja 3.x 1. Opis Aplikacja ARSOFT-WZ1 umożliwia konfigurację i
1. Opis aplikacji. 2. Przeprowadzanie pomiarów. 3. Tworzenie sprawozdania
 1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
1. Opis aplikacji Interfejs programu podzielony jest na dwie zakładki. Wszystkie ustawienia znajdują się w drugiej zakładce, są przygotowane do ćwiczenia i nie można ich zmieniac bez pozwolenia prowadzącego
KUKA Roboter CEE GmbH. Konfiguracja i połączenie układów bezpieczeństwa w gniazdach zrobotyzowanych na przykładzie robotów KUKA
 KUKA Roboter CEE GmbH Konfiguracja i połączenie układów bezpieczeństwa w gniazdach zrobotyzowanych na przykładzie robotów KUKA 2 Wyłącznik awaryjny 3 Ochrona operatora 4 Dodatkowe elementy zatrzymujące
KUKA Roboter CEE GmbH Konfiguracja i połączenie układów bezpieczeństwa w gniazdach zrobotyzowanych na przykładzie robotów KUKA 2 Wyłącznik awaryjny 3 Ochrona operatora 4 Dodatkowe elementy zatrzymujące
Obrabiarki CNC. Nr 10
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium Obrabiarki CNC Nr 10 Obróbka na tokarce CNC CT210 ze sterowaniem Sinumerik 840D Opracował: Dr inż. Wojciech Ptaszyński Poznań, 17 maja,
Instrukcja ręcznej konfiguracji połączenia z Internetem przez. modem ED77 w systemie Windows 2000
 Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows 2000 wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia.
Instrukcja ręcznej konfiguracji połączenia z Internetem przez UWAGA modem ED77 w systemie Windows 2000 wersja 1.0 Niniejsza instrukcja nie opisuje sposobu i przebiegu instalacji sterowników urządzenia.
SystimPlus. Dokumentacja (FAQ) dla wersji: v1.14.05.12
 dla wersji: v1.14.05.12") SystimPlus Dokumentacja (FAQ) dla wersji: v1.14.05.12 Spis treści 1.Co to jest SystimPlus?... 1 2.Instalacja i wymagania... 1 3.Jakie drukarki fiskalne obsługuje SystimPlus?... 3 4.Jak połączyć się z drukarką
SystimPlus Dokumentacja (FAQ) dla wersji: v1.14.05.12 Spis treści 1.Co to jest SystimPlus?... 1 2.Instalacja i wymagania... 1 3.Jakie drukarki fiskalne obsługuje SystimPlus?... 3 4.Jak połączyć się z drukarką
R 1. Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych
 Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
Pracownia Nauki Programowania i Aplikacji Robotów Przemysłowych Podstawowa instrukcja laboratoryjna R 1 Robot o równoległej strukturze kinematycznej i czterech stopniach swobody. Instrukcja dla studentów
KONFIGURACJA USŁUGI ZSIMED NA SERWERZE ZDALNYM
 KONFIGURACJA USŁUGI ZSIMED NA SERWERZE ZDALNYM Spis treści Wstęp... 2 1. Zarządzanie usługą... 2 1.1. Instalacja usługi ZSIMED... 2 1.2. Inicjowanie usługi ZSIMED... 3 1.3. Zatrzymanie usługi... 3 1.4.
KONFIGURACJA USŁUGI ZSIMED NA SERWERZE ZDALNYM Spis treści Wstęp... 2 1. Zarządzanie usługą... 2 1.1. Instalacja usługi ZSIMED... 2 1.2. Inicjowanie usługi ZSIMED... 3 1.3. Zatrzymanie usługi... 3 1.4.
Laboratorium Podstaw Robotyki ĆWICZENIE 2
 Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KR AGILUS Celem ćwiczenia jest zapoznanie ze strukturą
Laboratorium Podstaw Robotyki Politechnika Poznańska Katedra Sterowania i Inżynierii Systemów ĆWICZENIE 2 Podstawy obsługi i programowania manipulatora KR AGILUS Celem ćwiczenia jest zapoznanie ze strukturą
SPIS TREŚCI. FlyElectronics Wszelkie prawa zastrzeżone Marzec
 Instrukcja Obsługi aplikacji Copyright by FlyElectronics Marzec 2012 SPIS TREŚCI Instalacja PPGinfo Diagnostic Tool... - 3 - Pierwsze uruchomienie... - 4 - Opis funkcji programu Data Diagnostic... - 5-1.
Instrukcja Obsługi aplikacji Copyright by FlyElectronics Marzec 2012 SPIS TREŚCI Instalacja PPGinfo Diagnostic Tool... - 3 - Pierwsze uruchomienie... - 4 - Opis funkcji programu Data Diagnostic... - 5-1.
Przygotowanie do pracy frezarki CNC
 Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Wydział Budowy Maszyn i Zarządzania Instytut Technologii Mechanicznej Maszyny i urządzenia technologiczne laboratorium Przygotowanie do pracy frezarki CNC Cykl I Ćwiczenie 2 Opracował: dr inż. Krzysztof
Laboratorium Napędu robotów
 WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Laboratorium Napędu robotów INS 5 Ploter frezująco grawerujący Lynx 6090F 1. OPIS PRZYCISKÓW NA PANELU STEROWANIA. Rys. 1. Przyciski
Ustawienia ogólne. Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony
 Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
Ustawienia ogólne Ustawienia okólne są dostępne w panelu głównym programu System Sensor, po kliknięciu ikony Panel główny programu System Sensor (tylko dla wersja V2, V3, V4) Panel główny programu System
Programator Kart Master - klient
 Programator Kart Master - klient Kraków 2002.11.27 SPIS TREŚCI 1 WSTĘP... 2 2 ROZPOCZĘCIE PRACY Z PROGRAMEM... 3 3 ZMIANA KLUCZA DOSTĘPU.... 4 4 GENEROWANIE KART UŻYTKOWNIKÓW... 5 1 1 Wstęp Programator
Programator Kart Master - klient Kraków 2002.11.27 SPIS TREŚCI 1 WSTĘP... 2 2 ROZPOCZĘCIE PRACY Z PROGRAMEM... 3 3 ZMIANA KLUCZA DOSTĘPU.... 4 4 GENEROWANIE KART UŻYTKOWNIKÓW... 5 1 1 Wstęp Programator
Spis treści. Dane techniczne. Montaż
 Spis treści Dane techniczne... 2 Przygotowanie rury nawojowej...3 Określenie stanu regulacji rolety... 4 Zapamiętywanie nadajnika przy zaprogramowanych krańcówkach... 4 Regulacja wyłączników krańcowych...
Spis treści Dane techniczne... 2 Przygotowanie rury nawojowej...3 Określenie stanu regulacji rolety... 4 Zapamiętywanie nadajnika przy zaprogramowanych krańcówkach... 4 Regulacja wyłączników krańcowych...
Przymiar ArborSonic 3D z komunikacją Bluetooth. modele 1600 mm i 2000 mm. Instrukcja użytkownika. wer. 1.0
 Przymiar ArborSonic 3D z komunikacją Bluetooth modele 1600 mm i 2000 mm Instrukcja użytkownika wer. 1.0 kwiecień 2014 1 Wstęp Przymiar z funkcją komunikacji przez Bluetooth jest narzędziem do szybkiego
Przymiar ArborSonic 3D z komunikacją Bluetooth modele 1600 mm i 2000 mm Instrukcja użytkownika wer. 1.0 kwiecień 2014 1 Wstęp Przymiar z funkcją komunikacji przez Bluetooth jest narzędziem do szybkiego
Robot EPSON SCARA T3-401S
 Robot EPSON SCARA T3-401S 1 Napędy robota wykorzystują silniki AC, a pomiar położenia realizowany jest za pomocą enkoderów przyrostowych. 2 3 4 Przebieg ćwiczenia: Celem ćwiczenia jest zaznajomienie się
Robot EPSON SCARA T3-401S 1 Napędy robota wykorzystują silniki AC, a pomiar położenia realizowany jest za pomocą enkoderów przyrostowych. 2 3 4 Przebieg ćwiczenia: Celem ćwiczenia jest zaznajomienie się
INSTRUKCJA NAPĘDÓW SERII 35 I 45 BD
 Dane techniczne Napędy typu BD przeznaczone są do zautomatyzowania pracy rolet zewnętrznych lub bram rolowanych. Posiadają mechanizm detekcji przeszkód, dzięki któremu silnik wyczuwając opór na swojej
Dane techniczne Napędy typu BD przeznaczone są do zautomatyzowania pracy rolet zewnętrznych lub bram rolowanych. Posiadają mechanizm detekcji przeszkód, dzięki któremu silnik wyczuwając opór na swojej
1.2 Włączanie/ Wyłączanie
 1.2 Włączanie/ Wyłączanie Aby włączyć miernik, przejdź do pozycji I na przełączniku zasilania. Aby wyłączyć miernik, przejdź do pozycji 0 na przełączniku zasilania. Proszę wyłączyć miernik aby ładować
1.2 Włączanie/ Wyłączanie Aby włączyć miernik, przejdź do pozycji I na przełączniku zasilania. Aby wyłączyć miernik, przejdź do pozycji 0 na przełączniku zasilania. Proszę wyłączyć miernik aby ładować
Zdalne uruchomienie silnika. Działanie
 Działanie Funkcja zdalnego uruchamiania silnika służy do uruchamiania silnika bez przekręcania kluczyka zapłonu do położenia włączenia, np. korzystając zprzełącznika na zewnątrz kabiny. Działanie Istnieje
Działanie Funkcja zdalnego uruchamiania silnika służy do uruchamiania silnika bez przekręcania kluczyka zapłonu do położenia włączenia, np. korzystając zprzełącznika na zewnątrz kabiny. Działanie Istnieje
INSTRUKCJA OBSŁUGI TESTERA TCR3pc
 INSTRUKCJA OBSŁUGI TESTERA TCR3pc Tester służy do sterowania pompą common rail,oraz odczytu ciśnienia z listwy common rail. Dodatkowo dostępna jest funkcja pomiaru indukcyjności cewek zaworów ciśnienia.
INSTRUKCJA OBSŁUGI TESTERA TCR3pc Tester służy do sterowania pompą common rail,oraz odczytu ciśnienia z listwy common rail. Dodatkowo dostępna jest funkcja pomiaru indukcyjności cewek zaworów ciśnienia.
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Wyłącznik czasowy GAO EMT757
 INSTRUKCJA OBSŁUGI Wyłącznik czasowy GAO EMT757 Produkt nr 552451 Instrukcja obsługi Strona 1 z 10 Cyfrowy programator czasowy Artykuł nr: EMT757 A. Funkcje 1. Cyfrowy programator czasowy (zwany dalej
INSTRUKCJA OBSŁUGI Wyłącznik czasowy GAO EMT757 Produkt nr 552451 Instrukcja obsługi Strona 1 z 10 Cyfrowy programator czasowy Artykuł nr: EMT757 A. Funkcje 1. Cyfrowy programator czasowy (zwany dalej
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C)
") Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
Instrukcja programowania wieratko-frezarki BFKO, sterowanej odcinkowo (Sinumerik 802C) Stan na dzień Gliwice 10.12.2002 1.Przestrzeń robocza maszyny Rys. Układ współrzędnych Maksymalne przemieszczenia
STD - wersja standardowa
 STD STD - wersja standardowa Urządzenia dostępne w wersji STD Cieplarki laboratoryjne (CL) Inkubatory Laboratoryjne (IL) Suszarki Laboratoryjne (SL) Sterylizatory (SR) STD - wersja standardowa rozszerzone
STD STD - wersja standardowa Urządzenia dostępne w wersji STD Cieplarki laboratoryjne (CL) Inkubatory Laboratoryjne (IL) Suszarki Laboratoryjne (SL) Sterylizatory (SR) STD - wersja standardowa rozszerzone
Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie
 LABORATORIUM TECHNOLOGII Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie Przemysław Siemiński, Cel ćwiczenia: o o o o o zapoznanie z budową i działaniem frezarek CNC, przegląd
LABORATORIUM TECHNOLOGII Symulacja komputerowa i obróbka części 5 na frezarce sterowanej numerycznie Przemysław Siemiński, Cel ćwiczenia: o o o o o zapoznanie z budową i działaniem frezarek CNC, przegląd
FAQ: 00000013/PL Data: 16/11/2007 Programowanie przez Internet: Konfiguracja modułów SCALANCE S 612 V2 do komunikacji z komputerem przez VPN
 Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
Za pomocą dwóch modułów SCALANCE S 612 V2* (numer katalogowy: 6GK5612-0BA00-2AA3) chcemy umoŝliwić dostęp do sterownika podłączonego do zabezpieczonej sieci wewnętrznej. Komputer, z którego chcemy mieć
PROCEDURA USTAWIANIA CZUJNIKÓW
 www.alcaplast.cz PROCEDURA USTAWIANIA CZUJNIKÓW 1. Cechy oprogramowania Oprogramowanie Alca IR służy do ustawiania parametrów czujników podczerwieni M673D spółki ALCAPLAST. Do ustawienia czujnika konieczny
www.alcaplast.cz PROCEDURA USTAWIANIA CZUJNIKÓW 1. Cechy oprogramowania Oprogramowanie Alca IR służy do ustawiania parametrów czujników podczerwieni M673D spółki ALCAPLAST. Do ustawienia czujnika konieczny
VComNet Podręcznik użytkownika. VComNet. Podręcznik użytkownika Wstęp
 VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
VComNet Podręcznik użytkownika Wstęp VComNet przeznaczony jest do wdrażania aplikacji komunikacyjnych uruchomionych na komputerze PC z systemem Windows z urządzeniami połączonymi poprzez RS485 (RS422/RS232)
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0
 INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało
INSTRUKCJA OBSŁUGI microplc STEROWNIK INKUBATORA ver: F1.0 Opis ogólny: Sterownik inkubatora został zaprojektowany, tak aby spełnić potrzeby najbardziej wymagających procesów inkubacji. Urządzenie zostało
Instrukcja obsługi sterownika Novitek Triton
 Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Instrukcja obsługi sterownika Triton I. Zastosowanie Sterownik TRITON przeznaczony jest do obsługi generatorów. Sterownik ten jest wyposażony w funkcję sterowania przekaźnikiem światła oraz przekaźnikiem
Uniwersalny system automatyki budynkowej w oparciu o. moduł sterujący SAB i moduły wykonawcze MWD. Praca autonomiczna Moduł sterujący SAB...
 Uniwersalny system automatyki budynkowej w oparciu o moduł sterujący SAB i moduły wykonawcze MWD Praca autonomiczna Spis treści: 1. Informacja ogólne 1.1. Moduł sterujący SAB... 2 1.2. Moduł wykonawczy
Uniwersalny system automatyki budynkowej w oparciu o moduł sterujący SAB i moduły wykonawcze MWD Praca autonomiczna Spis treści: 1. Informacja ogólne 1.1. Moduł sterujący SAB... 2 1.2. Moduł wykonawczy
Politechnika Poznańska Instytut Technologii Mechanicznej. Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH. Nr 2
 Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
Politechnika Poznańska Instytut Technologii Mechanicznej Laboratorium MASZYN I URZĄDZEŃ TECHNOLOGICZNYCH Nr 2 POMIAR I KASOWANIE LUZU W STOLE OBROTOWYM NC Poznań 2008 1. CEL ĆWICZENIA Celem ćwiczenia jest
1. INSTALACJA SERWERA
 1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
1. INSTALACJA SERWERA Dostarczony serwer wizualizacji składa się z: 1.1. RASPBERRY PI w plastikowej obudowie; 1.2. Karty pamięci; 1.3. Zasilacza 5 V DC; 1,5 A; 1.4. Konwertera USB RS485; 1.5. Kabla
LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU
 LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU Ćwiczenie 9 STEROWANIE ROLETAMI POPRZEZ TEBIS TS. WYKORZYSTANIE FUNKCJI WIELOKROTNEGO ŁĄCZENIA. 2 1. Cel ćwiczenia. Celem ćwiczenia jest nauczenie przyszłego użytkownika
LABORATORIUM ENERGOOSZCZĘDNEGO BUDYNKU Ćwiczenie 9 STEROWANIE ROLETAMI POPRZEZ TEBIS TS. WYKORZYSTANIE FUNKCJI WIELOKROTNEGO ŁĄCZENIA. 2 1. Cel ćwiczenia. Celem ćwiczenia jest nauczenie przyszłego użytkownika
Spis treści. Opis urządzenia. Zawartość pudełka. Pierwsze użycie
 Spis treści Opis urządzenia... 1 Zawartość pudełka... 1 Pierwsze użycie... 1 Podstawowa obsługa urządzenia... 2 Opis diod LED... 3 Odczyt danych... 3 Instalacja oprogramowania... 3 Opis programu... 5 Windows
Spis treści Opis urządzenia... 1 Zawartość pudełka... 1 Pierwsze użycie... 1 Podstawowa obsługa urządzenia... 2 Opis diod LED... 3 Odczyt danych... 3 Instalacja oprogramowania... 3 Opis programu... 5 Windows
INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY TPC NA-10
 INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY TPC NA-10 1. DANE TECHNICZNE. 1 wejście pomiaru temperatury (czujnik temperatury NTC R25=5k, 6x30mm, przewód 2m) 1 wejście sygnałowe dwustanowe (styk zwierny) 1
INSTRUKCJA OBSŁUGI REGULATOR TEMPERATURY TPC NA-10 1. DANE TECHNICZNE. 1 wejście pomiaru temperatury (czujnik temperatury NTC R25=5k, 6x30mm, przewód 2m) 1 wejście sygnałowe dwustanowe (styk zwierny) 1
NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED
 NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED WSTĘP Nowa generacja modułów rodziny VNX ADVANCED posiada znacznie większe możliwości, niż dotychczas oferowane moduły. Jednym z istotnych
NARZĘDZIE KONFIGURACYJNE VNX SETUP TOOL MODUŁÓW RODZINY VNX ADVANCED WSTĘP Nowa generacja modułów rodziny VNX ADVANCED posiada znacznie większe możliwości, niż dotychczas oferowane moduły. Jednym z istotnych
Tablet Graficzny. oraz
 Tablet Graficzny oraz Zawartość 1.Informacje ogólne Ogólne Obszar roboczy 2. Pióro Ogólne Zmiana wkładu pióra 3. Łączenie Star 06 Bezprzewodowe Przewodowe Tryb uśpienia 4. Instalacja Sterowników Windows
Tablet Graficzny oraz Zawartość 1.Informacje ogólne Ogólne Obszar roboczy 2. Pióro Ogólne Zmiana wkładu pióra 3. Łączenie Star 06 Bezprzewodowe Przewodowe Tryb uśpienia 4. Instalacja Sterowników Windows
Instrukcja konfiguracji programu KS-ASW do pracy w trybie wielopodmiotowym
 Instrukcja konfiguracji programu KS-ASW do pracy Strona 1 z 9 Spis treści 1. Wstęp... 3 2. Zasada działania wielopodmiotowości... 3 3. Uruchamianie trybu wielopodmiotowości... 3 4. Dodawanie nowej firmy...
Instrukcja konfiguracji programu KS-ASW do pracy Strona 1 z 9 Spis treści 1. Wstęp... 3 2. Zasada działania wielopodmiotowości... 3 3. Uruchamianie trybu wielopodmiotowości... 3 4. Dodawanie nowej firmy...
Kalibracja wskaźnika wymaga jednorazowego podłączenia LPG Sensora do komputera za pomocą przewodu microusb
 LPG Sensor Wskaźnik poziomu gazu na desce rozdzielczej http://lpgsensor.pl Kalibracja wskaźnika Jak poprawnie skalibrować wskaźnik? Kalibracja wskaźnika wymaga jednorazowego podłączenia LPG Sensora do
LPG Sensor Wskaźnik poziomu gazu na desce rozdzielczej http://lpgsensor.pl Kalibracja wskaźnika Jak poprawnie skalibrować wskaźnik? Kalibracja wskaźnika wymaga jednorazowego podłączenia LPG Sensora do
System zdalnego sterowania
 System zdalnego sterowania Instrukcja obsługi Nr produktu: 225067 Wersja: 02/03 System zdalnego sterowania Pro 40, 60, 90 System wtykowy JR Produkt nr 22 50 62, 22 50 67, 22 50 71 System wtykowy Futaba
System zdalnego sterowania Instrukcja obsługi Nr produktu: 225067 Wersja: 02/03 System zdalnego sterowania Pro 40, 60, 90 System wtykowy JR Produkt nr 22 50 62, 22 50 67, 22 50 71 System wtykowy Futaba
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0
 Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0 Wersja z dnia: 2017-08-21 Spis treści Opis... 3 1. Zasady bezpieczeństwa... 3 Instalacja... 3 Użytkowanie...
Instrukcja obsługi SafeIT - modułu zdalnego sterowania do sterowników kotłów CO firmy Foster v1.0 Wersja z dnia: 2017-08-21 Spis treści Opis... 3 1. Zasady bezpieczeństwa... 3 Instalacja... 3 Użytkowanie...
MAX6 kalibracja parametru RL_OFFSET.doc. MAX6 - Kalibracja. 1. Tryb pracy samodzielny - LCD
 MAX6 - Kalibracja MAX6 jest kompatybilny z kilkoma programami jednak każdy z nich wymaga jednak innej kalibracji. ( obrazki poniżej uzyskano za pomocą schowka windows i przycisku ALT+PrtScr) 1. Tryb pracy
MAX6 - Kalibracja MAX6 jest kompatybilny z kilkoma programami jednak każdy z nich wymaga jednak innej kalibracji. ( obrazki poniżej uzyskano za pomocą schowka windows i przycisku ALT+PrtScr) 1. Tryb pracy
2.2 Opis części programowej
 2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
2.2 Opis części programowej Rysunek 1: Panel frontowy aplikacji. System pomiarowy został w całości zintegrowany w środowisku LabVIEW. Aplikacja uruchamiana na komputerze zarządza przebiegiem pomiarów poprzez
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Rejestratory Sił, Naprężeń.
 JAS Projektowanie Systemów Komputerowych Rejestratory Sił, Naprężeń. 2012-01-04 2 Zawartość Typy rejestratorów.... 4 Tryby pracy.... 4 Obsługa programu.... 5 Menu główne programu.... 7 Pliki.... 7 Typ
JAS Projektowanie Systemów Komputerowych Rejestratory Sił, Naprężeń. 2012-01-04 2 Zawartość Typy rejestratorów.... 4 Tryby pracy.... 4 Obsługa programu.... 5 Menu główne programu.... 7 Pliki.... 7 Typ
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/
 http://www.basecamelectronics.com/") Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
Konfiguracja zdalna i sterowanie za pomocą Bluetooth (Android) http://www.basecamelectronics.com/ Basecam simplebgc przewodnik konfiguracji regulatora https://play.google.com/store/apps/details?id=ru.smartsoft.simplebgc
Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. Wyświetlanie naprzemienne Numer parametru Wartość parametru
 Zadanie 1 Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. 5 Sekund = nie GOTOWY Wyświetlanie naprzemienne Numer parametru Wartość parametru 1 1 2009 Eaton Corporation. All
Zadanie 1 Przywracanie parametrów domyślnych. Przycisnąć przycisk STOP przez 5 sekund. 5 Sekund = nie GOTOWY Wyświetlanie naprzemienne Numer parametru Wartość parametru 1 1 2009 Eaton Corporation. All
Oprogramowanie Xesar V2.1.37.17 (opublikowano dnia 09.12.2015) 1 Sieć wirtualna Podłączenie maks. 14 czytników Xesar z modułem aktualizującym
 1 Sieć wirtualna Podłączenie maks. 14 czytników Xesar z modułem aktualizującym") Oprogramowanie Xesar V2.1.37.17 (opublikowano dnia 09.12.2015) 1 Sieć wirtualna Podłączenie maks. 14 czytników Xesar z modułem aktualizującym Możliwość podłączenia do systemu maks. 14 czytników naściennych
Oprogramowanie Xesar V2.1.37.17 (opublikowano dnia 09.12.2015) 1 Sieć wirtualna Podłączenie maks. 14 czytników Xesar z modułem aktualizującym Możliwość podłączenia do systemu maks. 14 czytników naściennych
Laboratorium Podstaw Robotyki Zasady BHP
 Laboratorium Podstaw Robotyki Zasady BHP Szkolenie dla pracujących w laboratorium robotyki Cel szkolenia Odbycie szkolenia BHP obowiązuje wszystkichpracujących w laboratorium Prowadzenie prac w laboratorium
Laboratorium Podstaw Robotyki Zasady BHP Szkolenie dla pracujących w laboratorium robotyki Cel szkolenia Odbycie szkolenia BHP obowiązuje wszystkichpracujących w laboratorium Prowadzenie prac w laboratorium
Spis treści. Opis urządzenia. Pierwsze użycie
 Spis treści Opis urządzenia... 1 Pierwsze użycie... 1 Podstawowa obsługa urządzenia... 2 Opis diod LED... 2 Przygotowania do odczytu danych z urządzenia... 2 Proces instalacji... 3 Zmiana domyślnego sterownika
Spis treści Opis urządzenia... 1 Pierwsze użycie... 1 Podstawowa obsługa urządzenia... 2 Opis diod LED... 2 Przygotowania do odczytu danych z urządzenia... 2 Proces instalacji... 3 Zmiana domyślnego sterownika
Skrócona instrukcja instalacji oprogramowania WinPower
 2012/09/05 Pomoc Techniczna, tel.: +48 61 6500 400 www.ever.eu 1 WinPower INSTALACJA I KONFIGURACJA A. Po uruchomieniu pliku instalacyjnego należy kierować się wskazówkami podczas instalacji. Podczas instalacji
2012/09/05 Pomoc Techniczna, tel.: +48 61 6500 400 www.ever.eu 1 WinPower INSTALACJA I KONFIGURACJA A. Po uruchomieniu pliku instalacyjnego należy kierować się wskazówkami podczas instalacji. Podczas instalacji
INSTRUKCJA OBSŁUGI. Przekaźnik czasowy ETM ELEKTROTECH Dzierżoniów. 1. Zastosowanie
 INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
INSTRUKCJA OBSŁUGI 1. Zastosowanie Przekaźnik czasowy ETM jest zadajnikiem czasowym przystosowanym jest do współpracy z prostownikami galwanizerskimi. Pozwala on załączyć prostownik w stan pracy na zadany
Tablet Graficzny. Windows 10,8, 7 i Mac 10.8 lub nowszy
 Tablet Graficzny Windows 10,8, 7 i Mac 10.8 lub nowszy Zawartość 1.Informacje ogólne Ogólne Obszar roboczy 2. Pióro Ogólne Zmiana wkładu pióra 3. Instalacja Sterowników Windows Mac 4. Ustawienia sterownika
Tablet Graficzny Windows 10,8, 7 i Mac 10.8 lub nowszy Zawartość 1.Informacje ogólne Ogólne Obszar roboczy 2. Pióro Ogólne Zmiana wkładu pióra 3. Instalacja Sterowników Windows Mac 4. Ustawienia sterownika
POMOC / INSTRUKCJA OBSŁUGI
 POMOC / INSTRUKCJA OBSŁUGI 1. Powiększanie mapy 2. Plakat 3. Schemat lekcji 4. Broszura informacyjna 5. Instrukcja obsługi Pasek narzędzi i menu wyboru Zmiana skali mapy Mini mapa - podgląd na położenie
POMOC / INSTRUKCJA OBSŁUGI 1. Powiększanie mapy 2. Plakat 3. Schemat lekcji 4. Broszura informacyjna 5. Instrukcja obsługi Pasek narzędzi i menu wyboru Zmiana skali mapy Mini mapa - podgląd na położenie
Instrukcja obsługi Bi-Tronic Control 3 - Multitemp
 Instrukcja obsługi Bi-Tronic Control 3 - Multitemp Zachować do wglądu Wersja dokumentu Indeks Data Rodzaj zmiany Zmieniony przez 1 2014/10/10 Utworzenie dokumentu YM / SG 2 Spis treści 1 - PREZENTACJA
Instrukcja obsługi Bi-Tronic Control 3 - Multitemp Zachować do wglądu Wersja dokumentu Indeks Data Rodzaj zmiany Zmieniony przez 1 2014/10/10 Utworzenie dokumentu YM / SG 2 Spis treści 1 - PREZENTACJA
Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika
 Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika Model: UP3017 Model - zgodność z przepisami: UP3017t UWAGA: UWAGA oznacza ważną informację, pomocną w lepszym używaniu komputera. Copyright
Dell UltraSharp UP3017 Dell Display Manager Instrukcja użytkownika Model: UP3017 Model - zgodność z przepisami: UP3017t UWAGA: UWAGA oznacza ważną informację, pomocną w lepszym używaniu komputera. Copyright
Mikroprocesorowy termostat elektroniczny RTSZ-6 Oprogramowanie wersja RTSZ-6v1.1
 .1 Mikroprocesorowy termostat elektroniczny RTSZ-6 Oprogramowanie wersja RTSZ-6v1.1 Instrukcja obsługi grudzień 2008 Szkoper Elektronik Strona 1 2008-12-28 .1 1 Parametry techniczne: Cyfrowy pomiar temperatury
.1 Mikroprocesorowy termostat elektroniczny RTSZ-6 Oprogramowanie wersja RTSZ-6v1.1 Instrukcja obsługi grudzień 2008 Szkoper Elektronik Strona 1 2008-12-28 .1 1 Parametry techniczne: Cyfrowy pomiar temperatury
Mikroprocesorowy termostat elektroniczny RTSZ-7 Oprogramowanie wersja RTSZ-7v2.1
 Mikroprocesorowy termostat elektroniczny RTSZ-7 Oprogramowanie wersja RTSZ-7v2.1 Instrukcja obsługi wrzesień 2009 Szkoper Elektronik Strona 1 2009-09-09 1 Parametry techniczne: Cyfrowy pomiar temperatury
Mikroprocesorowy termostat elektroniczny RTSZ-7 Oprogramowanie wersja RTSZ-7v2.1 Instrukcja obsługi wrzesień 2009 Szkoper Elektronik Strona 1 2009-09-09 1 Parametry techniczne: Cyfrowy pomiar temperatury
Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki
 Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
Ćwiczenie VIII LABORATORIUM MECHATRONIKI IEPiM Sterowanie, uczenie i symulacja robotów przemysłowych Kawasaki Zał.1 - Roboty przemysłowe i mobilne. Roboty Kawasaki - charakterystyka Zał.2 - Oprogramowanie
ODBIORNIK ZDALNEGO STEROWANIA REMC1 DO MARKIZ I ROLET MODEL INSTRUKCJA
 ODBIORNIK ZDALNEGO STEROWANIA DO MARKIZ I ROLET REMC1 MODEL RX INSTRUKCJA 2 PILOTY ZDALNEGO STEROWANIA WYJAŚNIENIE SYMBOLI Silnik potwierdza przyjęcie polecenia wykonując dwa krótkie ruchy w przeciwnych
ODBIORNIK ZDALNEGO STEROWANIA DO MARKIZ I ROLET REMC1 MODEL RX INSTRUKCJA 2 PILOTY ZDALNEGO STEROWANIA WYJAŚNIENIE SYMBOLI Silnik potwierdza przyjęcie polecenia wykonując dwa krótkie ruchy w przeciwnych
Instalacja urządzenia
 Wstęp Do drukarki zwykle dołączona jest płyta ze sterownikami Systemy Windows mogą już posiadać sterowniki, jednak zapewniają one jedynie podstawową funkcjonalność urządzenia Do drukarki może nie być dołączony
Wstęp Do drukarki zwykle dołączona jest płyta ze sterownikami Systemy Windows mogą już posiadać sterowniki, jednak zapewniają one jedynie podstawową funkcjonalność urządzenia Do drukarki może nie być dołączony
Statyczna próba rozciągania - Adam Zaborski
 Statyczna próba rozciągania PN/H-431 Próbki okrągłe: proporcjonalne (5-cio, 1-ciokrotne), nieproporcjonalne płaskie: z główkami (wiosełkowe), bez główek próbka okrągła dziesięciokrotna Określane wielkości
Statyczna próba rozciągania PN/H-431 Próbki okrągłe: proporcjonalne (5-cio, 1-ciokrotne), nieproporcjonalne płaskie: z główkami (wiosełkowe), bez główek próbka okrągła dziesięciokrotna Określane wielkości
Spółka z o.o. INSTRUKCJA UŻYTKOWANIA PROGRAMU SCHRS. Do współpracy z: dotyczy programu SCHRS w wersji: 1.27
 Spółka z o.o. 80-180 Gdańsk Kowale, ul. Kwiatowa 3/1, tel.(058)32 282 31, fax.(058)32 282 33, www.kared.com.pl, e-mail: kared@kared.com.pl, KRS:0000140099, NIP: 583-001-80-84, Regon: 008103751, BZWBK S.A.
Spółka z o.o. 80-180 Gdańsk Kowale, ul. Kwiatowa 3/1, tel.(058)32 282 31, fax.(058)32 282 33, www.kared.com.pl, e-mail: kared@kared.com.pl, KRS:0000140099, NIP: 583-001-80-84, Regon: 008103751, BZWBK S.A.
MULTIFUN - SYSTEM BEZPRZEWODOWY
 MULTIFUN - SYSTEM BEZPRZEWODOWY OPIS SYSTEMU System SHHS (Smart Home Heating System) umożliwia łatwe i szybkie podłączenie czujników bezprzewodowych do regulatora Multifun. Zalety systemu SHHS: zmiana
MULTIFUN - SYSTEM BEZPRZEWODOWY OPIS SYSTEMU System SHHS (Smart Home Heating System) umożliwia łatwe i szybkie podłączenie czujników bezprzewodowych do regulatora Multifun. Zalety systemu SHHS: zmiana
Hi-Q Recorder Instrukcja Użytkownika
 Osobisty rejestrator rozmów telefonicznych. Instrukcja. Ver.0.01.16 Teleinformatyka Ul. Słoneczna 9/16 11-230 Bisztynek www.serwiscentral.pl email: info@serwiscentral.pl 1 S t r o n a Spis treści 1. Cechy
Osobisty rejestrator rozmów telefonicznych. Instrukcja. Ver.0.01.16 Teleinformatyka Ul. Słoneczna 9/16 11-230 Bisztynek www.serwiscentral.pl email: info@serwiscentral.pl 1 S t r o n a Spis treści 1. Cechy
REGULATOR PI W SIŁOWNIKU 2XI
 REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
REGULATOR PI W SIŁOWNIKU 2XI Wydanie 1 lipiec 2012 r. 1 1. Regulator wbudowany PI Oprogramowanie sterownika Servocont-03 zawiera wbudowany algorytm regulacji PI (opcja). Włącza się go poprzez odpowiedni
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
- 2 - OSTRZEŻENIE UWAGA
 Tech ST-3800-1 - ST-3800 I. Bezpieczeństwo Przed przystąpieniem do użytkowania urządzenia należy przeczytać uważnie poniższe przepisy. Nieprzestrzeganie tych instrukcji może być przyczyną obrażeń i uszkodzeń
Tech ST-3800-1 - ST-3800 I. Bezpieczeństwo Przed przystąpieniem do użytkowania urządzenia należy przeczytać uważnie poniższe przepisy. Nieprzestrzeganie tych instrukcji może być przyczyną obrażeń i uszkodzeń
przedmiot specjalnościowy (podstawowy / kierunkowy / inny HES) przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy
 przedmiot obowiązkowy (obowiązkowy / nieobowiązkowy) polski semestr siódmy") Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Załącznik nr 7 do Zarządzenia Rektora nr 10/12 z dnia 21 lutego 2012r. KARTA MODUŁU / KARTA PRZEDMIOTU Kod modułu Nazwa modułu Roboty Przemysłowe Nazwa modułu w języku angielskim Industrial Robots Obowiązuje
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC
 Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
Program szkolenia zawodowego Operator Programista Obrabiarek Sterowanych Numerycznie CNC Kurs zawodowy Operator - Programista Obrabiarek Sterowanych Numerycznie CNC ma na celu nabycie przez kursanta praktycznych
WARIATOR USTAWIENIA Białystok, Plażowa 49/1, Poland,
 WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
WARIATOR USTAWIENIA 1. Podłączyć wariator do instalacji pojazdu według schematu. 2. Wybrać typ czujnika czujnika z paska Halotronowy lub Indukcyjny 2.1. Niezałączony czujnik Halla ewentualnie optyczny
PROGRAM DO ARCHIWIZACJI NOŚNIKÓW KOPII ELEKTRONICZNEJ
 POSNET POLSKA S.A. ul. Municypalna 33 02-281 WARSZAWA tel. +48 22 86 86 888 fax. +48 22 86 86 889 www.posnet.com PROGRAM DO ARCHIWIZACJI NOŚNIKÓW KOPII ELEKTRONICZNEJ INSTRUKCJA UŻYTKOWNIKA WERSJA 2.4
POSNET POLSKA S.A. ul. Municypalna 33 02-281 WARSZAWA tel. +48 22 86 86 888 fax. +48 22 86 86 889 www.posnet.com PROGRAM DO ARCHIWIZACJI NOŚNIKÓW KOPII ELEKTRONICZNEJ INSTRUKCJA UŻYTKOWNIKA WERSJA 2.4
HELIOS pomoc społeczna
 Instrukcja przygotowania pliku wsadowego do zasilenia SEPI przy pomocy dodatkowej aplikacji HELSepi 1. Instalacja aplikacji Pobieramy plik instalacyjny HelSEPIsetup.exe ze strony internetowej www.ops.strefa.pl
Instrukcja przygotowania pliku wsadowego do zasilenia SEPI przy pomocy dodatkowej aplikacji HELSepi 1. Instalacja aplikacji Pobieramy plik instalacyjny HelSEPIsetup.exe ze strony internetowej www.ops.strefa.pl
Wirtualne przyrządy kontrolno-pomiarowe
 Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
Katedra Mechaniki i Podstaw Konstrukcji Maszyn POLITECHNIKA OPOLSKA Wirtualne przyrządy kontrolno-pomiarowe dr inż.. Roland PAWLICZEK Laboratorium komputerowe Mechatroniki Cel zajęć ęć: Przyrząd pomiarowy:
HC1 / HC2. Regulator temperatury
 HC1 / HC2 Regulator temperatury Uwagi dotyczące miejsca użytkowania Opisywany sterownik HC1/HC2 nie powinien być używany: W środowisku gazów łatwopalnych, gazów wywołujących korozję oraz cząsteczek, które
HC1 / HC2 Regulator temperatury Uwagi dotyczące miejsca użytkowania Opisywany sterownik HC1/HC2 nie powinien być używany: W środowisku gazów łatwopalnych, gazów wywołujących korozję oraz cząsteczek, które
Multimetr cyfrowy MAS-345. Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0
 Multimetr cyfrowy MAS-345 Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0 Do urządzenia MAS-345 została dołączona płyta CD zawierająca oprogramowanie DMM VIEW 2.0, dzięki któremu moŝliwa
Multimetr cyfrowy MAS-345 Instrukcja instalacji i obsługi oprogramowania DMM VIEW Ver 2.0 Do urządzenia MAS-345 została dołączona płyta CD zawierająca oprogramowanie DMM VIEW 2.0, dzięki któremu moŝliwa
1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB
 1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB 1.1 OBSZAR WIDOKU POCZĄTKOWEGO 1.2 WYMIARY PANELU 1.3 DEFINICJA PRZYCISKÓW 1.4 NORMALNA PRACA Przytrzymaj włącz/wyłącz aby uruchomić wyświetlacz. Po włączeniu
1. INSTRUKCJA OBSŁUGI WYŚWIETLACZA LCD C600E USB 1.1 OBSZAR WIDOKU POCZĄTKOWEGO 1.2 WYMIARY PANELU 1.3 DEFINICJA PRZYCISKÓW 1.4 NORMALNA PRACA Przytrzymaj włącz/wyłącz aby uruchomić wyświetlacz. Po włączeniu
MIERNIK T-SCALE BWS 1
 MIERNIK T-SCALE BWS 1 2 Spis treści 1. WSTĘP... 4 2. OPIS KLAWIATURY... 4 3. PODSTAWOWE OPERACJE... 5 Zerowanie... 5 Tarowanie... 5 Ważenie przedmiotu... 5 4. WAŻENIE KONTROLNE... 6 Ustawianie limitów...
MIERNIK T-SCALE BWS 1 2 Spis treści 1. WSTĘP... 4 2. OPIS KLAWIATURY... 4 3. PODSTAWOWE OPERACJE... 5 Zerowanie... 5 Tarowanie... 5 Ważenie przedmiotu... 5 4. WAŻENIE KONTROLNE... 6 Ustawianie limitów...
KUKA System Software 8.2
 KUKA System Software KUKA Roboter GmbH KUKA System Software 8.2 Instrukcja obsługi i programowania użytkownika końcowego Stan na: 20.07.2012 Wersja: KSS 8.2 END V2 pl (PDF) Copyright 2012 KUKA Roboter
KUKA System Software KUKA Roboter GmbH KUKA System Software 8.2 Instrukcja obsługi i programowania użytkownika końcowego Stan na: 20.07.2012 Wersja: KSS 8.2 END V2 pl (PDF) Copyright 2012 KUKA Roboter
ST- 380 I. Bezpieczeństwo OSTRZEŻENIE Urządzenie elektryczne po napięciem. UWAGA
 Tech - 1 - ST-380 I. Bezpieczeństwo Przed przystąpieniem do użytkowania urządzenia należy przeczytać uważnie poniższe przepisy. Nieprzestrzeganie tych instrukcji może być przyczyną obrażeń i uszkodzeń
Tech - 1 - ST-380 I. Bezpieczeństwo Przed przystąpieniem do użytkowania urządzenia należy przeczytać uważnie poniższe przepisy. Nieprzestrzeganie tych instrukcji może być przyczyną obrażeń i uszkodzeń
Długopis z ukrytą kamerą cyfrową HD
 Długopis z ukrytą kamerą cyfrową HD Instrukcja obsługi Nr produktu: 956256 Strona 1 z 5 1. Szczegóły produktu Nr Nazwa Opis 1 Przycisk obsługi Jest to wielofunkcyjny przycisk, którego funkcje zależą od
Długopis z ukrytą kamerą cyfrową HD Instrukcja obsługi Nr produktu: 956256 Strona 1 z 5 1. Szczegóły produktu Nr Nazwa Opis 1 Przycisk obsługi Jest to wielofunkcyjny przycisk, którego funkcje zależą od
INFO-NET.wsparcie. pppoe.in.net.pl. Pamiętaj aby nie podawać nikomu swojego hasła! Instrukcja połączenia PPPoE w Windows XP WAŻNA INFORMACJA
 Instrukcja połączenia PPPoE w Windows XP W celu ułatwienia konfiguracji połączenia w przyszłości, w poniższe pola można przepisać nazwę użytkownika (login) i hasło do połączenia, które otrzymali Państwo
Instrukcja połączenia PPPoE w Windows XP W celu ułatwienia konfiguracji połączenia w przyszłości, w poniższe pola można przepisać nazwę użytkownika (login) i hasło do połączenia, które otrzymali Państwo