KUKA Roboter CEE GmbH. Konfiguracja i połączenie układów bezpieczeństwa w gniazdach zrobotyzowanych na przykładzie robotów KUKA
|
|
|
- Maja Czajkowska
- 8 lat temu
- Przeglądów:
Transkrypt
1 KUKA Roboter CEE GmbH Konfiguracja i połączenie układów bezpieczeństwa w gniazdach zrobotyzowanych na przykładzie robotów KUKA

2 2

3 Wyłącznik awaryjny 3

4 Ochrona operatora 4

5 Dodatkowe elementy zatrzymujące W opcji ProfiSAFE dodatkowo: Zatrzymanie bezpieczeństwa Stop 1 5
6 6

7 Standardowe podłączenie X11 7


8 Standardowe podłączenie X11 X13 8
9 Płyty bezpieczeństwa SION EXTENDED- X13 SION STANDARD - X11 9

10 ProfiNet X11 10


11 Safe PLC ProfiSafe X11 11

12 Mała stacja jeden robot 12
13 Mała stacja jeden robot 13
14 Mała stacja jeden robot 14

15 Mała stacja dwa roboty 15

16 Mała stacja dwa roboty 16
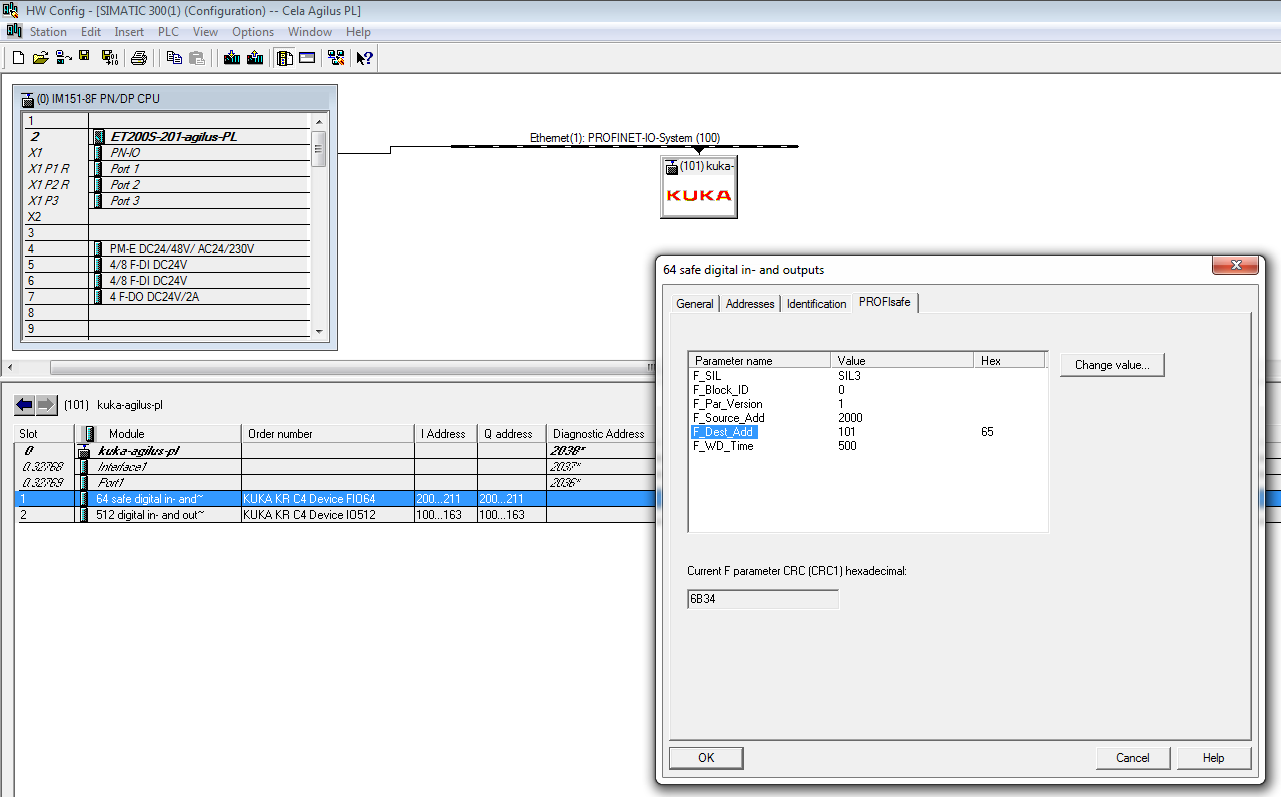
17 Konfiguracja w STEP 7 17
18 Gotowa konfiguracja 18
19 Konfiguracja w STEP 7 19
20 Konfiguracja w STEP 7 20
21 Ramka ProfiSAFE 21
22 Paczki technologiczne Pakiety KUKA.Safe są kombinacją najnowszych programowych i sprzętowych rozwiązań dotyczących bezpieczeństwa, które umożliwiają ograniczanie i monitorowanie przestrzeni roboczych oraz stref bezpiecznych. 22

23 SafeOperation KUKA.SafeOperation oferuje bezpieczne rozwiązania: Sterownik bezpieczeństwa umożliwiający wykrywanie pozycji w 3 kategorii bezpieczeństwa Zrobotyzowane gniazdo ze skonfigurowanymi, monitorowanymi przestrzeniami Dwu-kanałowe wejścia/wyjścia w 3 kategorii bezpieczeństwa 23

24 SafeOperation Konfiguracja gniazda dla redukcji potrzebnej powierzchni: Teoretyczna przestrzeń robocza dla robota została zredukowana poprzez zaprogramowane przestrzenie robocze oraz strefy bezpieczeństwa Przestrzeń potrzebna dla tego systemu jest mniejsza, ochrona jest potrzebna tylko dla tej zmniejszonej powierzchni. 24


25 SafeOperation Ochrona płotów Przestrzeń robocza, która porusza się wraz z robotem Strefa bezpieczeństwa, robot porusza się poza strefą Strefa akcji: reakcja robota zmienia się jeżeli robot wejdzie do bezpiecznej strefy 25
26 SafeRangeMonitoring Dzięki SafeRangeMonitoring: Robot przemysłowy porusza się we wcześniej skonfigurowanych i aktywowanych granicach dla osi. Rzeczywiste pozycje robota są stale obliczane i monitorowane na podstawie ustalonych parametrów bezpieczeństwa. Sterownik bezpieczeństwa monitoruje robota przemysłowego za pomocą ustalonych parametrów bezpieczeństwa. Jeśli zostanie narusza granica nadzoru lub któryś z parametrów bezpieczeństwa, robot i jego dodatkowe osie zewnętrzne zostaną zatrzymane. 1. Zakres pracy 2. Zakres bezpieczeństwa 26
27 SafeRangeMonitoring Przykład: Przestrzeń robocza osiowa: Przykład: Osiowa strefa bezpieczeństwa: 1. Przestrzeń robocza 1. Przestrzeń robocza 2. Robot 2. Robot 3. Dystans zatrzymania 3. Dystans zatrzymania 4. Obszar chroniony 4. Strefa bezpieczeństwa 5. Druga dozwolona strefa 27
28 Narzędzie diagnostyczne 28
29 DiagnoseSafety Pakiet technologiczny KUKA.DiagnoseSafety umożliwia: Diagnostykę bezpiecznych wejść i wyjść Diagnostykę bezpiecznych modułów (CIB, CIB-SR, SIB-STD i SIB-EXT) Diagnostykę sygnałów interfejsu bezpieczeństwa Ethernet (PROFIsafe, CIP Safety) Diagnostykę konfiguracji dodatkowych opcji bezpieczeństwa 29
30 DiagnoseSafety 1. Filtr przestrzeni 2. Index przestrzeni 3. Ścianka celi 4. Informacje dotyczące wybranego obiektu 5. Płaszczyzna x/y dla bazy $WORLD 6. Układ współrzędnych $WORLD 7. Graficzne przedstawienie przestrzeni kartezjańskich monitoringu, zakres ruchu specyficznego dla osi i bezpiecznych narzędzi robota 30

31 DiagnoseSafety 31
32 Dziękuję za uwagę! 32
mvk metal safety Aktywna technologia bezpieczeństwa Maksymalne bezpieczeństwo Wytrzymałość Szczelność
 mvk metal safety Aktywna technologia bezpieczeństwa Maksymalne bezpieczeństwo Wytrzymałość Szczelność 02 mvk metal safety Optymalna ochrona człowieka i maszyny 03 maksymalne BezpieczeństwO w nieprzyjaznym
mvk metal safety Aktywna technologia bezpieczeństwa Maksymalne bezpieczeństwo Wytrzymałość Szczelność 02 mvk metal safety Optymalna ochrona człowieka i maszyny 03 maksymalne BezpieczeństwO w nieprzyjaznym
Kurs Projektowanie i programowanie z Distributed Safety. Spis treści. Dzień 1. I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212)
") Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Spis treści Dzień 1 I Bezpieczeństwo funkcjonalne - wprowadzenie (wersja 1212) I-3 Cel stosowania bezpieczeństwa funkcjonalnego I-4 Bezpieczeństwo funkcjonalne I-5 Zakres aplikacji I-6 Standardy w zakresie
Spis treści. Dzień 1. I Konfiguracja sterownika (wersja 1410) II Edycja programu (wersja 1406) III Środowisko TIA Portal (wersja 1410)
 II Edycja programu (wersja 1406) III Środowisko TIA Portal (wersja 1410)") Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1410) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Co jest potrzebne by zacząć? I-5 TIA Portal ekran startowy I-6 Tworzenie nowego projektu I-7
Spis treści Dzień 1 I Konfiguracja sterownika (wersja 1410) I-3 Zadanie Tworzenie konfiguracji sprzętowej I-4 Co jest potrzebne by zacząć? I-5 TIA Portal ekran startowy I-6 Tworzenie nowego projektu I-7
Kurs SINAMICS G120 Konfiguracja i uruchomienie. Spis treści. Dzień 1
 Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Spis treści Dzień 1 I Sterowanie napędami wprowadzenie (wersja 1301) I-3 Przykładowa budowa silnika asynchronicznego I-4 Przykładowa budowa silnika asynchronicznego I-5 Przykładowa zależności momentu od
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 4 Temat: Programowanie trajektorii ruchu Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin Wiśniewski
Sterownik KR C4(8.x)
") Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
Systemy programowania robotów przemysłowych - obsługa i podstawy programowania robotów KUKA Sterownik KR C4(8.x) 1 Klasy robotów KUKA małe średnie wysokie bardzo wysokie konstrukcje obciążenia obciążenia
KR C4 extended; KR C4 extended CK
 Controller KUKA Roboter GmbH KR C4 extended; KR C4 extended CK Instrukcja obsługi Stan na: 28.01.2014 Wersja: BA KR C4 extended V3 Copyright 2014 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg Niemcy
Controller KUKA Roboter GmbH KR C4 extended; KR C4 extended CK Instrukcja obsługi Stan na: 28.01.2014 Wersja: BA KR C4 extended V3 Copyright 2014 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg Niemcy
KR C4 extended; KR C4 extended CK
 Controller KUKA Roboter GmbH KR C4 extended; KR C4 extended CK Instrukcja obsługi Stan na: 18.02.2013 Wersja: BA KR C4 extended V1 pl (PDF) Copyright 2013 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg
Controller KUKA Roboter GmbH KR C4 extended; KR C4 extended CK Instrukcja obsługi Stan na: 18.02.2013 Wersja: BA KR C4 extended V1 pl (PDF) Copyright 2013 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink.
 Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Symulacja działania sterownika dla robota dwuosiowego typu SCARA w środowisku Matlab/Simulink. Celem ćwiczenia jest symulacja działania (w środowisku Matlab/Simulink) sterownika dla dwuosiowego robota
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi
 Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Wittmann 4.0 wtryskarka jako centrum sterowania urządzeniami peryferyjnymi PLASTECH 6-7 kwiecień 2017 Wittmann Group JACEK Denis Metral KULIŚ / 2016-10 Proces kontroli produkcji wtryskowni WWW ERP MES
Automation and Drives. service. Szkolenia
 Automation and Drives service Szkolenia s SINUMERIK 810D/840D Programowanie i obsługa I Uruchamianie obrabiarki Praca w trybie JOG Praca w trybie MDA Praca w trybie AUTO/SBL Powrót do konturu tryb REPOS
Automation and Drives service Szkolenia s SINUMERIK 810D/840D Programowanie i obsługa I Uruchamianie obrabiarki Praca w trybie JOG Praca w trybie MDA Praca w trybie AUTO/SBL Powrót do konturu tryb REPOS
1.1. Wymogi bezpieczeństwa Pomoc techniczna TIA Portal V13 instalacja i konfiguracja pakietu...18
 3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
3 Przedmowa...9 Wstęp... 13 1. Pierwsze kroki... 15 1.1. Wymogi bezpieczeństwa...16 1.2. Pomoc techniczna...17 1.3. TIA Portal V13 instalacja i konfiguracja pakietu...18 1.3.1. Opis części składowych środowiska
dokument DOK 02-05-12 wersja 1.0 www.arskam.com
 ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
ARS3-RA v.1.0 mikro kod sterownika 8 Linii I/O ze zdalną transmisją kanałem radiowym lub poprzez port UART. Kod przeznaczony dla sprzętu opartego o projekt referencyjny DOK 01-05-12. Opis programowania
Strategiczny program badań naukowych i prac rozwojowych Profilaktyka i leczenie chorób cywilizacyjnych STRATEGMED
 Opis przedmiotu zamówienia - specyfikacja techniczna Przedmiotem zamówienia jest: Dostawa, szkolenie, montaż i uruchomienie w siedzibie zamawiającego ramienia 6 osiowego o wysokiej precyzji pozycjonowania.
Opis przedmiotu zamówienia - specyfikacja techniczna Przedmiotem zamówienia jest: Dostawa, szkolenie, montaż i uruchomienie w siedzibie zamawiającego ramienia 6 osiowego o wysokiej precyzji pozycjonowania.
Zostaw znakowanie Nam My wiemy jak zrobić to perfekcyjnie
 Zostaw znakowanie Nam My wiemy jak zrobić to perfekcyjnie dostępne standardowe modele o mocy 12W, 30W i 60W pole pracy od (10 x 10)mm do (300 x 300)mm opcja znakowania w locie przy stałej prędkości bogata
Zostaw znakowanie Nam My wiemy jak zrobić to perfekcyjnie dostępne standardowe modele o mocy 12W, 30W i 60W pole pracy od (10 x 10)mm do (300 x 300)mm opcja znakowania w locie przy stałej prędkości bogata
Spis treści. Dzień 1. I Wprowadzenie (wersja 1506) II Elementy systemu S120 (wersja 1506) III Uruchomienie w trybie offline (wersja 1506)
 II Elementy systemu S120 (wersja 1506) III Uruchomienie w trybie offline (wersja 1506)") I Wprowadzenie (wersja 1506) Kurs SINAMICS S120 Konfiguracja i uruchomienie Spis treści Dzień 1 I-3 Elementy techniki napędowej firmy SIEMENS I-4 Rozwiązania techniki napędowej firmy SIEMENS rodzina G
I Wprowadzenie (wersja 1506) Kurs SINAMICS S120 Konfiguracja i uruchomienie Spis treści Dzień 1 I-3 Elementy techniki napędowej firmy SIEMENS I-4 Rozwiązania techniki napędowej firmy SIEMENS rodzina G
System INFIDIO. Bezprzewodowy system sterowania oświetleniem przemysłowym
 System INFIDIO Bezprzewodowy system sterowania oświetleniem przemysłowym Pełna kontrola oświetlenia i inteligentne oszczędzanie energii Przemysłowy system komunikacji bezprzewodowej INFIDIO służy do zarządzania
System INFIDIO Bezprzewodowy system sterowania oświetleniem przemysłowym Pełna kontrola oświetlenia i inteligentne oszczędzanie energii Przemysłowy system komunikacji bezprzewodowej INFIDIO służy do zarządzania
Moduł RS232 E054. TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03
 TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03 I n s t r u k c j a O b s ł u g i Ademco Microtech Security Moduł RS232 E054 Nr kat.: L114/A
TAP - Systemy Alarmowe Sp. z o. o. os. Armii Krajowej 125 61-381 Poznań tel. 061 876 70 88; fax: 061 875 03 03 I n s t r u k c j a O b s ł u g i Ademco Microtech Security Moduł RS232 E054 Nr kat.: L114/A
s FAQ: /PL Data: 29/08/2014
 Migracja S7-1200 z FW 3.0 do FW 4.0 Proces wycofywania z produkcji Sterowników S7-1200 z wersją firmware FW V3 rozpocznie się 1 października 2014. Po tym terminie wszystkie wersje CPU będą jeszcze dostępne
Migracja S7-1200 z FW 3.0 do FW 4.0 Proces wycofywania z produkcji Sterowników S7-1200 z wersją firmware FW V3 rozpocznie się 1 października 2014. Po tym terminie wszystkie wersje CPU będą jeszcze dostępne
Spis treści. Dzień 1. I Wprowadzenie (wersja 1510) II Elementy systemu S120 (wersja 1510) III Uruchomienie w trybie offline (wersja 1510)
 II Elementy systemu S120 (wersja 1510) III Uruchomienie w trybie offline (wersja 1510)") I Wprowadzenie (wersja 1510) Kurs SINAMICS S120 Konfiguracja i uruchomienie Spis treści Dzień 1 I-3 Elementy techniki napędowej firmy SIEMENS I-4 Rozwiązania techniki napędowej firmy SIEMENS rodzina G
I Wprowadzenie (wersja 1510) Kurs SINAMICS S120 Konfiguracja i uruchomienie Spis treści Dzień 1 I-3 Elementy techniki napędowej firmy SIEMENS I-4 Rozwiązania techniki napędowej firmy SIEMENS rodzina G
SIMATIC ET. produkty 07/08
 SIMATIC ET produkty 07/08 ET 200pro zastępuje ET 200X ET200X -> ET200pro Koniec dystrybucji ET 200X. Od 2007 uzyskały status części zamiennych. Oznacza to, wzrost ceny oraz wydłużenie terminu dostaw. ET
SIMATIC ET produkty 07/08 ET 200pro zastępuje ET 200X ET200X -> ET200pro Koniec dystrybucji ET 200X. Od 2007 uzyskały status części zamiennych. Oznacza to, wzrost ceny oraz wydłużenie terminu dostaw. ET
Programowanie robotów Kuka
 Wersje szafy sterowniczej KRC1 Programowanie robotów Kuka KRC2 Istnieje możliwość podłączenia myszy do portu COM1. Jednak aplikacje i funkcje, które z tego portu korzystają muszą zostać przełączone na
Wersje szafy sterowniczej KRC1 Programowanie robotów Kuka KRC2 Istnieje możliwość podłączenia myszy do portu COM1. Jednak aplikacje i funkcje, które z tego portu korzystają muszą zostać przełączone na
WorkVisual 2.0. KUKA System Technology. Do KUKA System Software 8.2 Do VW System Software 8.2. KUKA Roboter GmbH. Stan na:
 KUKA System Technology KUKA Roboter GmbH WorkVisual 2.0 Do KUKA System Software 8.2 Do VW System Software 8.2 Stan na: 12.04.2011 Wersja: KST WorkVisual 2.0 V1 pl Copyright 2011 KUKA Roboter GmbH Zugspitzstraße
KUKA System Technology KUKA Roboter GmbH WorkVisual 2.0 Do KUKA System Software 8.2 Do VW System Software 8.2 Stan na: 12.04.2011 Wersja: KST WorkVisual 2.0 V1 pl Copyright 2011 KUKA Roboter GmbH Zugspitzstraße
Projektowanie systemów zrobotyzowanych
 ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
ZAKŁAD PROJEKTOWANIA TECHNOLOGII Laboratorium Projektowanie systemów zrobotyzowanych Instrukcja 2 Temat: Rozpoczęcie pracy z programem RobotStudio Opracował: mgr inż. Arkadiusz Pietrowiak mgr inż. Marcin
KUKA System Software 8.2
 KUKA System Software KUKA Roboter GmbH KUKA System Software 8.2 Instrukcja obsługi i programowania użytkownika końcowego Stan na: 20.07.2012 Wersja: KSS 8.2 END V2 pl (PDF) Copyright 2012 KUKA Roboter
KUKA System Software KUKA Roboter GmbH KUKA System Software 8.2 Instrukcja obsługi i programowania użytkownika końcowego Stan na: 20.07.2012 Wersja: KSS 8.2 END V2 pl (PDF) Copyright 2012 KUKA Roboter
Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4.
 Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4. Wymagania i uwagi ogólne Z uwagi na to, że oprogramowanie CSMIOv3 jest fazie testów, powinno być używane jedynie przez osoby, które są dobrze
Oprogramowanie testowe CSMIO/IP v3.000 dla programu Mach4. Wymagania i uwagi ogólne Z uwagi na to, że oprogramowanie CSMIOv3 jest fazie testów, powinno być używane jedynie przez osoby, które są dobrze
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA
 Układ graficzny CKE 016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
Układ graficzny CKE 016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
witamy w świecie KUKA Robotics Robotyzacja według KUKA Roboter KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła Strona 1
 witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
witamy w świecie KUKA Robotics KUKA Roboter CEE GmbH Sp. z.o.o. Janusz Jakieła 22.05.2013 Strona 1 German Engineering. Od roku 1898. KUKA. Od samego początku technologicznie z duchem czasu. Nowa generacja
Na terenie Polski firma Turck jest również wyłącznym przedstawicielem następujących firm:
 O nas Firma Turck to jeden ze światowych liderów w dziedzinie automatyki przemysłowej. Przedsiębiorstwo zatrudnia ponad 4800 pracowników w 30 krajach oraz posiada przedstawicieli w kolejnych 60 krajach.
O nas Firma Turck to jeden ze światowych liderów w dziedzinie automatyki przemysłowej. Przedsiębiorstwo zatrudnia ponad 4800 pracowników w 30 krajach oraz posiada przedstawicieli w kolejnych 60 krajach.
Thinx Poland. Piotr Jelonek Główny specjalista ds. rozwoju sieci CCIE #15426
 System monitoringu infrastruktury Thinx Poland Piotr Jelonek Główny specjalista ds. rozwoju sieci CCIE #15426 ATMAN - System monitoringu serwerowni 13000 zmiennych 2.000 progów alarmowych 2.600 logowanych
System monitoringu infrastruktury Thinx Poland Piotr Jelonek Główny specjalista ds. rozwoju sieci CCIE #15426 ATMAN - System monitoringu serwerowni 13000 zmiennych 2.000 progów alarmowych 2.600 logowanych
Safety Integrated dla napędów. Funkcje bezpieczeństwa zintegrowane w napędach Sinamics S120
 Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
Safety Integrated dla napędów bezpieczeństwa zintegrowane w napędach Sinamics S120 Safety Integrated dla napędów : Przegląd bezpieczeństwa dla napędów zgodne z IEC 61800-5-2 Sterowanie przez zaciski EP
SIMOCODE pro. Informacje na temat podręczników dla systemu SIMOCODE pro
 SIMOCODE pro Informacje na temat podręczników dla systemu SIMOCODE pro 11-2015 Spis treści Wstęp..... 3 Podręcznik systemowy SIMOCODE pro... 4 SIMOCODE pro PROFIBUS System Manual... 5 SIMOCODE pro PROFNET
SIMOCODE pro Informacje na temat podręczników dla systemu SIMOCODE pro 11-2015 Spis treści Wstęp..... 3 Podręcznik systemowy SIMOCODE pro... 4 SIMOCODE pro PROFIBUS System Manual... 5 SIMOCODE pro PROFNET
INSTALACJA I KONFIGURACJA SYSTEMU WINDOWS
 Zespół Szkół Technicznych w Suwałkach Pracownia Systemów Komputerowych Ćwiczenie Nr 14 INSTALACJA I KONFIGURACJA SYSTEMU WINDOWS Opracował Sławomir Zieliński Suwałki 2013 Cel ćwiczenia Nabycie umiejętności
Zespół Szkół Technicznych w Suwałkach Pracownia Systemów Komputerowych Ćwiczenie Nr 14 INSTALACJA I KONFIGURACJA SYSTEMU WINDOWS Opracował Sławomir Zieliński Suwałki 2013 Cel ćwiczenia Nabycie umiejętności
Blok sterownika CPX-CMXX
 Główne cechy Koordynacja ruchów wielu napędów elektrycznych jest inteligentnym modułem terminala CPX służącym do sterowania napędami elektrycznymi z Festo. Można sterować zarówno ruchami indywidualnych
Główne cechy Koordynacja ruchów wielu napędów elektrycznych jest inteligentnym modułem terminala CPX służącym do sterowania napędami elektrycznymi z Festo. Można sterować zarówno ruchami indywidualnych
Zawsze do Państwa dyspozycji 24 godziny na dobę. Wsparcie techniczne KUKA.
 Zawsze do Państwa dyspozycji 24 godziny na dobę. Wsparcie techniczne KUKA. Wsparcie Techniczne KUKA zapewnia maksymalną dostępność w każdym czasie i w każdym miejscu. Maksymalna dostępność Państwa instalacji
Zawsze do Państwa dyspozycji 24 godziny na dobę. Wsparcie techniczne KUKA. Wsparcie Techniczne KUKA zapewnia maksymalną dostępność w każdym czasie i w każdym miejscu. Maksymalna dostępność Państwa instalacji
Zastosowania mikrokontrolerów w przemyśle
 Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Zastosowania mikrokontrolerów w przemyśle Cezary MAJ Katedra Mikroelektroniki i Technik Informatycznych Literatura Ryszard Pełka: Mikrokontrolery - architektura, programowanie, zastosowania Projektowanie
Ćwiczenia z S7-1200. S7-1200 jako Profinet-IO Controller. FAQ Marzec 2012
 Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Ćwiczenia z S7-1200 S7-1200 jako Profinet-IO Controller FAQ Marzec 2012 Spis treści 1 Opis zagadnienie poruszanego w ćwiczeniu. 3 1.1 Wykaz urządzeń..... 3 2 KONFIGURACJA S7-1200 PLC.. 4 2.1 Nowy projekt.
Frezarka serii HY-TB3 trzyosiowa Instrukcja obsługi
 Frezarka serii HY-TB3 trzyosiowa Instrukcja obsługi 1 S t r o n a Spis treści: Dane techniczne: 3 Funkcje dodatkowe: 4 Podłączenie interfejsu: 4 Praca maszyny: 5 Opis panelu sterującego maszyny: 5 Opis
Frezarka serii HY-TB3 trzyosiowa Instrukcja obsługi 1 S t r o n a Spis treści: Dane techniczne: 3 Funkcje dodatkowe: 4 Podłączenie interfejsu: 4 Praca maszyny: 5 Opis panelu sterującego maszyny: 5 Opis
Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie
 Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX9000 Sterownik CX9000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Konfigurowanie sterownika CX9000 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne ze sterownikiem CX9000 Sterownik CX9000 należy do grupy urządzeń określanych jako komputery wbudowane (Embedded-PC).
Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi
 Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi Leszek Jabłoński Cele optymalizacja pracy sieci ciepłowniczej zwiększenie efektywności energetycznej większe bezpieczeństwo dostaw
Nowe spojrzenie na systemy monitoringu i sterowania sieciami ciepłowniczymi Leszek Jabłoński Cele optymalizacja pracy sieci ciepłowniczej zwiększenie efektywności energetycznej większe bezpieczeństwo dostaw
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
SESJA TEMATYCZNA I Innowacyjne rozwiązania wspomagające rozwój oraz uznawanie kompetencji zawodowych NOWOCZESNE METODY MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie
 Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Konfigurowanie modułu BK9050 firmy Beckhoff wprowadzenie Stanowisko laboratoryjne z modułem BK9050 Moduł BK9050 jest urządzeniem typu Bus Coupler, umożliwiającym instalację rozproszonych grup terminali
Frezarka serii HY-TB4 czteroosiowa Instrukcja obsługi
 Frezarka serii HY-TB4 czteroosiowa Instrukcja obsługi Tombit, Strona 1 Spis treści: Dane techniczne: 3 Funkcje dodatkowe: 4 Podłączenie interfejsu: 5 Praca maszyny: 6 Opis panelu sterującego maszyny: 6
Frezarka serii HY-TB4 czteroosiowa Instrukcja obsługi Tombit, Strona 1 Spis treści: Dane techniczne: 3 Funkcje dodatkowe: 4 Podłączenie interfejsu: 5 Praca maszyny: 6 Opis panelu sterującego maszyny: 6
NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH STANOWISKA TECHNODYDAKTYCZNE
 2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
2. OGÓLNOPOLSKI KONGRES EDUKACJI POZAFORMALNEJ NOWOCZESNE METODY KSZTAŁTOWANIA UMIEJĘTNOŚCI ZAWODOWYCH MARIUSZ SICZEK, Jacek Wojutyński INSTYTUT TECHNOLOGII EKSPLOATACJI PAŃSTWOWY INSTYTUT BADAWCZY w Radomiu
rh-serwer 2.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg.
 systemu F&Home RADIO. Wersja LR powiększony zasięg.") KARTA KATALOGOWA rh-serwer.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-serwer.0 LR jest centralnym urządzeniem sterującym elementami Systemu F&Home Radio. Zarządza
KARTA KATALOGOWA rh-serwer.0 LR Sterownik główny (serwer) systemu F&Home RADIO. Wersja LR powiększony zasięg. rh-serwer.0 LR jest centralnym urządzeniem sterującym elementami Systemu F&Home Radio. Zarządza
Instrukcja z przedmiotu Napęd robotów
 POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
POLITECHNIKA WROCŁAWSKA WYDZIAŁ ELEKTRYCZNY INSTYTUT MASZYN, NAPĘDÓW I POMIARÓW ELEKTRYCZNYCH Instrukcja z przedmiotu Napęd robotów Wieloosiowy liniowy napęd pozycjonujący robot ramieniowy RV-2AJ CEL ĆWICZENIA
Załącznik nr 1 Szczegółowy wykaz zamawianego sprzętu Zestaw komputerowy klasy PC nr 1 Stacja robocza PC 2. Monitor LCD
 Załącznik nr 1 Szczegółowy wykaz zamawianego sprzętu Specyfikacja istotnych warunków zamówienia na zestawy komputerowe z oprogramowaniem, komputer przenośny notebook, zasilacze awaryjne UPS, projektor
Załącznik nr 1 Szczegółowy wykaz zamawianego sprzętu Specyfikacja istotnych warunków zamówienia na zestawy komputerowe z oprogramowaniem, komputer przenośny notebook, zasilacze awaryjne UPS, projektor
Załącznik nr 1. Zawód/ podmiot. Nazwa przedmiotu zakupu j. miary ilość. szt. 4
 Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Załącznik nr 1 Lp. Branża Zawód/ podmiot Nazwa przedmiotu zakupu j. miary ilość 1 2 3 Stanowisko dydaktyczne z pionową płytą montażową ze sterownikiem PLC (min. SIMENS SIMATIC S7-1200 + KTP400 24we/16wy)
Enkodery absolutne w aplikacjach bezpieczeństwa
 Robert Skibiński 2015 Enkodery absolutne w aplikacjach bezpieczeństwa partner w automatyce Seria CDV/CDH 75 V Rozwiązanie z wałkiem H- rozwiązanie przelotowe Początki enkoderów bezpieczeństwa Rozwiązania
Robert Skibiński 2015 Enkodery absolutne w aplikacjach bezpieczeństwa partner w automatyce Seria CDV/CDH 75 V Rozwiązanie z wałkiem H- rozwiązanie przelotowe Początki enkoderów bezpieczeństwa Rozwiązania
VIBcare ZDALNE MONITOROWANIE STANU MASZYN. www.ec-systems.pl
 VIBcare ZDALNE MONITOROWANIE STANU MASZYN www.ecsystems.pl ZDALNY NADZÓR DIAGNOSTYCZNY EC SYSTEMS WIEDZA I DOŚWIADCZENIE, KTÓRYM MOŻESZ ZAUFAĆ N owe technologie służące monitorowaniu i diagnostyce urządzeń
VIBcare ZDALNE MONITOROWANIE STANU MASZYN www.ecsystems.pl ZDALNY NADZÓR DIAGNOSTYCZNY EC SYSTEMS WIEDZA I DOŚWIADCZENIE, KTÓRYM MOŻESZ ZAUFAĆ N owe technologie służące monitorowaniu i diagnostyce urządzeń
IRB PODSUMOWANIE:
 IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
IRB 2400 - PODSUMOWANIE: Rysunki obrazujące wymiary, udźwig i zasięg znajdują się na kolejnych stronach. Zdjęcia robota opisywanego tutaj są dostępne na dysku sieciowym pod adresem: https://drive.google.com/open?id=0b0jqhp-eodqgcfrhctlual9tauu
Uniwersalna stacja dokująca z USB typu C
 Uniwersalna stacja dokująca z USB typu C Instrukcja użytkowania DA-70864 Wstęp Niniejsza stacja dokująca z USB typu C oferuje zintegrowane rozwiązanie umożliwiające zasilanie, przesyłanie danych, sygnału
Uniwersalna stacja dokująca z USB typu C Instrukcja użytkowania DA-70864 Wstęp Niniejsza stacja dokująca z USB typu C oferuje zintegrowane rozwiązanie umożliwiające zasilanie, przesyłanie danych, sygnału
Podstawy programowania sterowników SIMATIC S w języku LAD / Tomasz Gilewski. Legionowo, cop Spis treści
 Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
Podstawy programowania sterowników SIMATIC S7-1200 w języku LAD / Tomasz Gilewski. Legionowo, cop. 2017 Spis treści Przedmowa 9 Wstęp 13 1. Pierwsze kroki 15 1.1. Wymogi bezpieczeństwa 16 1.2. Pomoc techniczna
SYSTEM STEROWANIA I MONITORINGU SMOD-02
 SYSTEM STEROWANIA I MONITORINGU SYSTEM STEROWANIA I MONITORINGU System służy do diagnozowania wpływu warunków atmosferycznych na urządzenia elektroniczne w szafach telekomunikacyjnych oraz sterowania urządzeniami
SYSTEM STEROWANIA I MONITORINGU SYSTEM STEROWANIA I MONITORINGU System służy do diagnozowania wpływu warunków atmosferycznych na urządzenia elektroniczne w szafach telekomunikacyjnych oraz sterowania urządzeniami
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, Spis treści
. Warszawa, Spis treści") Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Programowanie sterowników przemysłowych / Jerzy Kasprzyk. wyd. 2 1 dodr. (PWN). Warszawa, 2017 Spis treści Przedmowa 11 ROZDZIAŁ 1 Wstęp 13 1.1. Rys historyczny 14 1.2. Norma IEC 61131 19 1.2.1. Cele i
Kurs Zaawansowany S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Spis treści Dzień 1 I Konfiguracja sprzętowa i parametryzacja stacji SIMATIC S7 (wersja 1211) I-3 Dlaczego powinna zostać stworzona konfiguracja sprzętowa? I-4 Zadanie Konfiguracja sprzętowa I-5 Konfiguracja
Uniwersalna stacja dokująca do notebooka 12", USB Type-C
 Uniwersalna stacja dokująca do notebooka 12", USB Type-C Instrukcja obsługi DA-70860 (srebrny) DA-70862 (szary) Całkowicie funkcjonalna i precyzyjna stacja dokująca pasująca do notebooka firmy DIGITUS
Uniwersalna stacja dokująca do notebooka 12", USB Type-C Instrukcja obsługi DA-70860 (srebrny) DA-70862 (szary) Całkowicie funkcjonalna i precyzyjna stacja dokująca pasująca do notebooka firmy DIGITUS
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA
 Układ graficzny CKE 2018 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
Układ graficzny CKE 2018 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
Kurs Certyfikowany Inżynier Sieci PROFIBUS DP. Spis treści. Dzień 1
 Spis treści Dzień 1 I Sieć PROFIBUS wprowadzenie (wersja 1405) I-3 FMS, DP, PA - 3 wersje protokołu PROFIBUS I-4 Zastosowanie sieci PROFIBUS w automatyzacji zakładu I-5 Architektura protokołu PROFIBUS
Spis treści Dzień 1 I Sieć PROFIBUS wprowadzenie (wersja 1405) I-3 FMS, DP, PA - 3 wersje protokołu PROFIBUS I-4 Zastosowanie sieci PROFIBUS w automatyzacji zakładu I-5 Architektura protokołu PROFIBUS
Materiały pomocnicze do ćwiczeń laboratoryjnych
 Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Materiały pomocnicze do ćwiczeń laboratoryjnych Badanie napędów elektrycznych z luzownikami w robocie Kawasaki FA006E wersja próbna Literatura uzupełniająca do ćwiczenia: 1. Cegielski P. Elementy programowania
Kurs SIMATIC S7-300/400 i TIA Portal - Zaawansowany. Spis treści. Dzień 1
 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1503) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie nowego projektu I-6 Tworzenie
STEKOP SA. Odbiornik dialerowy. Zakład Pracy Chronionej 15-404 Białystok, ul. Młynowa 21 tel./fax : (+48 85) 7420039, 7423567 http://www.stekop.
 7420039, 7423567 http://www.stekop.") STEKOP SA Zakład Pracy Chronionej 15-404 Białystok, ul. Młynowa 21 tel./fax : (+48 85) 7420039, 7423567 http://www.stekop.com Odbiornik dialerowy typ AT 1M ver. 1.0 Instrukcja użytkownika Białystok lipiec
STEKOP SA Zakład Pracy Chronionej 15-404 Białystok, ul. Młynowa 21 tel./fax : (+48 85) 7420039, 7423567 http://www.stekop.com Odbiornik dialerowy typ AT 1M ver. 1.0 Instrukcja użytkownika Białystok lipiec
Instrukcja do oprogramowania ENAP DEC-1
 Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Instrukcja do oprogramowania ENAP DEC-1 Do urządzenia DEC-1 dołączone jest oprogramowanie umożliwiające konfigurację urządzenia, rejestrację zdarzeń oraz wizualizację pracy urządzenia oraz poszczególnych
Spis treści. Dzień 1. I Rozpoczęcie pracy ze sterownikiem (wersja 1707) II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400
 II Bloki danych (wersja 1707) ZAAWANSOWANY TIA DLA S7-300/400") ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
ZAAWANSOWANY TIA DLA S7-300/400 Spis treści Dzień 1 I Rozpoczęcie pracy ze sterownikiem (wersja 1707) I-3 Zadanie Konfiguracja i uruchomienie sterownika I-4 Etapy realizacji układu sterowania I-5 Tworzenie
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską
 Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
Laboratorium demonstrator bazowych technologii Przemysłu 4.0 przykład projektu utworzenia laboratorium przez KSSE i Politechnikę Śląską (wynik prac grupy roboczej ds. kształcenia, kompetencji i zasobów
INTERFEJS KWP2000, KWP2000plus INSTRUKCJA OBSŁUGI
 INTERFEJS KWP2000, KWP2000plus INSTRUKCJA OBSŁUGI www.viaken.pl 1 /9 strona 1. BEZPIECZEŃSTWO PRACY Przed pierwszym uruchomieniem urządzenia naleŝy uwaŝnie przeczytać instrukcję obsługi. 1. Urządzenie
INTERFEJS KWP2000, KWP2000plus INSTRUKCJA OBSŁUGI www.viaken.pl 1 /9 strona 1. BEZPIECZEŃSTWO PRACY Przed pierwszym uruchomieniem urządzenia naleŝy uwaŝnie przeczytać instrukcję obsługi. 1. Urządzenie
Tytuł Aplikacji: Aplikacja przetwornic częstotliwości Danfoss w sieci przemysłowej Profinet
 Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
Poniższy artykuł został w pełni przygotowany przez Autoryzowanego Dystrybutora firmy Danfoss i przedstawia rozwiązanie aplikacyjne wykonane w oparciu o produkty z rodziny VLT Firma Danfoss należy do niekwestionowanych
ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI
 ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI tel. 22 549 43 53, fax. 22 549 43 50, www.sabur.com.pl, sabur@sabur.com.pl 1/7 ASEM UBIQUITY ASEM Uqiuity to nowatorskie rozwiązanie na platformy Win 32/64 oraz Win
ASEM UBIQUITY PRZEGLĄD FUNKCJONALNOŚCI tel. 22 549 43 53, fax. 22 549 43 50, www.sabur.com.pl, sabur@sabur.com.pl 1/7 ASEM UBIQUITY ASEM Uqiuity to nowatorskie rozwiązanie na platformy Win 32/64 oraz Win
KR C4 midsize; KR C4 midsize CK
 Controller KUKA Roboter GmbH KR C4 midsize; KR C4 midsize CK Instrukcja użytkowania Stan na: 20.11.2013 Wersja: BA KR C4 midsize V4 Copyright 2013 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg
Controller KUKA Roboter GmbH KR C4 midsize; KR C4 midsize CK Instrukcja użytkowania Stan na: 20.11.2013 Wersja: BA KR C4 midsize V4 Copyright 2013 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg
Katedra Optoelektroniki i Systemów Elektronicznych. Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne
 Katedra Optoelektroniki i Systemów Elektronicznych Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne Przybyłem, zobaczyłem, zmierzyłem... Komputerowe Systemy Elektroniczne Absolwent profilu/specjalności
Katedra Optoelektroniki i Systemów Elektronicznych Profil dyplomowania i Specjalność Komputerowe Systemy Elektroniczne Przybyłem, zobaczyłem, zmierzyłem... Komputerowe Systemy Elektroniczne Absolwent profilu/specjalności
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA
 Układ graficzny CKE 2016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
Układ graficzny CKE 2016 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2017 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Projektowanie
KONWERTER DVB IP -> DVB ASI DELTA-2
 MIKROPROJEKT P.P.H. Rafał Buczyński ul. Zieleniecka 10B, 05-091 Ząbki; NIP: 774-124-16-05 biuro: ul. Ratuszowa 11 p. 312, 03-450 Warszawa; tel. 022-4242588, fax: 022-6192610, gsm: 503125553 www.mikroprojekt.com,
MIKROPROJEKT P.P.H. Rafał Buczyński ul. Zieleniecka 10B, 05-091 Ząbki; NIP: 774-124-16-05 biuro: ul. Ratuszowa 11 p. 312, 03-450 Warszawa; tel. 022-4242588, fax: 022-6192610, gsm: 503125553 www.mikroprojekt.com,
Siła ryglowania 2000N PL e Opcja zwolnienia ucieczkowego Dostępny z zintegrowanymi przyciskami
 Produkty Komponenty bezpieczeństwa Wyłączniki blokujące Ryglujące MAB Siła ryglowania 2000N PL e Opcja zwolnienia ucieczkowego Dostępny z zintegrowanymi przyciskami Funkcja 442G-MAB to wielofunkcyjne urządzenie
Produkty Komponenty bezpieczeństwa Wyłączniki blokujące Ryglujące MAB Siła ryglowania 2000N PL e Opcja zwolnienia ucieczkowego Dostępny z zintegrowanymi przyciskami Funkcja 442G-MAB to wielofunkcyjne urządzenie
HYDRO-ECO-SYSTEM. Sieciowe systemy monitoringu pompowni wykonane w technologii
 HYDRO-ECO-SYSTEM Sieciowe systemy monitoringu pompowni wykonane w technologii e-flownet portal Internetowy monitoring pompowni ścieków Monitoring może obejmować wszystkie obiekty komunalne: Monitoring
HYDRO-ECO-SYSTEM Sieciowe systemy monitoringu pompowni wykonane w technologii e-flownet portal Internetowy monitoring pompowni ścieków Monitoring może obejmować wszystkie obiekty komunalne: Monitoring
SYSTEM KONTROLI DOSTĘPU. XChronos
 SYSTEM KONTROLI DOSTĘPU XChronos Kontrola dostępu Najważniejsze cechy Kontrola dostępu do obiektów Szerokie możliwości raportowania Szeroki wybór technik identyfikacji Sterowanie ryglami i urządzeniami
SYSTEM KONTROLI DOSTĘPU XChronos Kontrola dostępu Najważniejsze cechy Kontrola dostępu do obiektów Szerokie możliwości raportowania Szeroki wybór technik identyfikacji Sterowanie ryglami i urządzeniami
3 ROZWIĄZANIA ŁĄCZNOŚCI
 3 ROZWIĄZANIA ŁĄCZNOŚCI 40 41 Ciężko pracowaliśmy nad o Prawdziwie kompletny projekt nie może ograniczać się do definiowania technicznych cech sprzętu. W tak złożonym scenariuszu, jak ten, który ewoluuje
3 ROZWIĄZANIA ŁĄCZNOŚCI 40 41 Ciężko pracowaliśmy nad o Prawdziwie kompletny projekt nie może ograniczać się do definiowania technicznych cech sprzętu. W tak złożonym scenariuszu, jak ten, który ewoluuje
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 CZĘŚĆ PRAKTYCZNA
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie lokalnych sieci komputerowych i administrowanie sieciami Oznaczenie
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Układ graficzny CKE 2018 Nazwa kwalifikacji: Projektowanie lokalnych sieci komputerowych i administrowanie sieciami Oznaczenie
4. Chwytaki robotów przemysłowych Wstęp Metody doboru chwytaków robotów przemysłowych Zasady projektowania chwytaków robotów
 Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Spis treści Wstęp 1. Wprowadzenie 11 1.1. Rozwój i prognozy robotyki 11 1.2. Światowy rynek robotyki 19 1.3. Prognoza na lata 2007-2009 25 1.4. Roboty usługowe do użytku profesjonalnego i prywatnego 26
Magistrala. Magistrala (ang. Bus) służy do przekazywania danych, adresów czy instrukcji sterujących w różne miejsca systemu komputerowego.
 służy do przekazywania danych, adresów czy instrukcji sterujących w różne miejsca systemu komputerowego.") Plan wykładu Pojęcie magistrali i jej struktura Architektura pamięciowo-centryczna Architektura szynowa Architektury wieloszynowe Współczesne architektury z połączeniami punkt-punkt Magistrala Magistrala
Plan wykładu Pojęcie magistrali i jej struktura Architektura pamięciowo-centryczna Architektura szynowa Architektury wieloszynowe Współczesne architektury z połączeniami punkt-punkt Magistrala Magistrala
1. Cel ćwiczenia. Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU.
 1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
1. Cel ćwiczenia Celem ćwiczenia jest zestawienie połączenia pomiędzy dwoma sterownikami PLC za pomocą protokołu Modbus RTU. 2. Porty szeregowe w sterowniku VersaMax Micro Obydwa porty szeregowe sterownika
INFORMATOR TECHNICZNY GE FANUC. Zalecana konfiguracja systemu gorącej rezerwacji Max-ON
 Informator techniczny nr 28 -- lipiec 2007 -- INFORMATOR TECHNICZNY GE FANUC Zalecana konfiguracja systemu gorącej rezerwacji Max-ON GE Fanuc Max-ON to rozproszony system sterowania z gorącą rezerwacją,
Informator techniczny nr 28 -- lipiec 2007 -- INFORMATOR TECHNICZNY GE FANUC Zalecana konfiguracja systemu gorącej rezerwacji Max-ON GE Fanuc Max-ON to rozproszony system sterowania z gorącą rezerwacją,
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 ZASADY OCENIANIA
 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 ZASADY OCENIANIA Układ graficzny CKE 2019 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż,
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2019 ZASADY OCENIANIA Układ graficzny CKE 2019 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż,
Korekta do podręcznika
 Technika napędowa \ Automatyka napędowa \ Integracja systemów \ Serwisy Korekta do podręcznika MOVIMOT MM..D Funkcje bezpieczeństwa Rozszerzenie dopuszczalnych kombinacji urządzeń Wydanie 11/2013 20258275
Technika napędowa \ Automatyka napędowa \ Integracja systemów \ Serwisy Korekta do podręcznika MOVIMOT MM..D Funkcje bezpieczeństwa Rozszerzenie dopuszczalnych kombinacji urządzeń Wydanie 11/2013 20258275
Instrukcja konfiguracji kas Novitus do współpracy z CRK
 Instrukcja konfiguracji kas Novitus Z Centralnym Repozytorium Kas kasy Online Novitus łączą się za pośrednictwem złącza LAN (Ethernet), oraz opcjonalnie za pomocą modułu WLAN lub modemu GSM. W zależności
Instrukcja konfiguracji kas Novitus Z Centralnym Repozytorium Kas kasy Online Novitus łączą się za pośrednictwem złącza LAN (Ethernet), oraz opcjonalnie za pomocą modułu WLAN lub modemu GSM. W zależności
ComBricks Diagnostyka - Integracja systemów - Sterowanie
 PROCENTEC ComBricks Diagnostyka - Integracja systemów - Sterowanie Jedyny na rynku produkt z wbudowaną funkcjonalnością oscyloskopu pozwalajacą na stałe monitorowanie sieci PROFIBUS poprzez Ethernet Stworzony
PROCENTEC ComBricks Diagnostyka - Integracja systemów - Sterowanie Jedyny na rynku produkt z wbudowaną funkcjonalnością oscyloskopu pozwalajacą na stałe monitorowanie sieci PROFIBUS poprzez Ethernet Stworzony
Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy
 Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Ćwiczenie V LABORATORIUM MECHATRONIKI IEPiM Konfiguracja i programowanie sterownika GE Fanuc VersaMax z modelem procesu przepływów i mieszania cieczy Zał.1 - Działanie i charakterystyka sterownika PLC
Kurs Podstawowy S7. Spis treści. Dzień 1
 Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Spis treści Dzień 1 I System SIMATIC S7 - wprowadzenie (wersja 1401) I-3 Rodzina sterowników programowalnych SIMATIC S7 firmy SIEMENS I-4 Dostępne moduły i ich funkcje I-5 Jednostki centralne I-6 Podstawowe
Laboratorium Sterowania Robotów Sprawozdanie
 Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Instytut Automatyki Politechniki Łódzkiej FTIMS, Informatyka wtorek 10:15 12:00 Laboratorium Sterowania Robotów Sprawozdanie Skład grupy laboratoryjnej: Krzysztof Łosiewski 127260 Łukasz Nowak 127279 Kacper
Nazwa kwalifikacji: Montaż i eksploatacja systemów komputerowych, urządzeń peryferyjnych i sieci Oznaczenie kwalifikacji: EE.08 Numer zadania: 01
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż i eksploatacja systemów komputerowych, urządzeń peryferyjnych i sieci Oznaczenie kwalifikacji: EE.08
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż i eksploatacja systemów komputerowych, urządzeń peryferyjnych i sieci Oznaczenie kwalifikacji: EE.08
Kalibracja robotów przemysłowych
 Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
Kalibracja robotów przemysłowych Rzeszów 27.07.2013 Kalibracja robotów przemysłowych 1. Układy współrzędnych w robotyce... 3 2 Deklaracja globalnego układu współrzędnych.. 5 3 Deklaracja układu współrzędnych
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE
 Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż i eksploatacja systemów komputerowych, urządzeń peryferyjnych i sieci Oznaczenie kwalifikacji: EE.08
Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż i eksploatacja systemów komputerowych, urządzeń peryferyjnych i sieci Oznaczenie kwalifikacji: EE.08
Rozwiązanie dla standardowych urządzeń...
 Rozwiązanie dla standardowych urządzeń... PROCESS FIELD BUS Page 1 PROFIBUS i SIMATIC pozwala osiągnąć Obniżenie kosztów okablowania Łatwy wybór produktu Łatwość instalacji i uruchomienia Krótki czas rozruchu
Rozwiązanie dla standardowych urządzeń... PROCESS FIELD BUS Page 1 PROFIBUS i SIMATIC pozwala osiągnąć Obniżenie kosztów okablowania Łatwy wybór produktu Łatwość instalacji i uruchomienia Krótki czas rozruchu
EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA
 Układ graficzny CKE 2017 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż
Układ graficzny CKE 2017 EGZAMIN POTWIERDZAJĄCY KWALIFIKACJE W ZAWODZIE Rok 2018 ZASADY OCENIANIA Arkusz zawiera informacje prawnie chronione do momentu rozpoczęcia egzaminu Nazwa kwalifikacji: Montaż
Stabilis Monitoring. 1/9
 1/9 Maksymalizacja czasu pracy maszyn i kontrola procesów produkcji. Do czego służy? umożliwia zbieranie danych w czasie rzeczywistym bezpośrednio z maszyn, urządzeń, automatyki przemysłowej oraz systemów
1/9 Maksymalizacja czasu pracy maszyn i kontrola procesów produkcji. Do czego służy? umożliwia zbieranie danych w czasie rzeczywistym bezpośrednio z maszyn, urządzeń, automatyki przemysłowej oraz systemów
PBX SERVER LIBRA. Cennik systemów telekomunikacyjnych LIPIEC 2013
 PBX SERVER LIBRA SYSTEM DO 1000 ABONENTÓW POLE KOMUTACYJNE IP DOSTĘPNE KONFIGURACJE: Do 64 linii miejskich analogowych Do 128 łączy ISDN BRA (2B+D) - miejskie Do 8 łączy ISDN PRA (30B+D) Do 720 analogowych
PBX SERVER LIBRA SYSTEM DO 1000 ABONENTÓW POLE KOMUTACYJNE IP DOSTĘPNE KONFIGURACJE: Do 64 linii miejskich analogowych Do 128 łączy ISDN BRA (2B+D) - miejskie Do 8 łączy ISDN PRA (30B+D) Do 720 analogowych
Controller. KUKA Roboter GmbH. KR C2 edition2005. Specyfikacja. Stan na: 08.10.2010. Wersja: Spez KR C2 ed05 V5 pl
 Controller KUKA Roboter GmbH KR C2 edition2005 Specyfikacja Stan na: 08.10.2010 Wersja: Spez KR C2 ed05 V5 pl Copyright 2010 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg Niemcy Niniejsza dokumentacja
Controller KUKA Roboter GmbH KR C2 edition2005 Specyfikacja Stan na: 08.10.2010 Wersja: Spez KR C2 ed05 V5 pl Copyright 2010 KUKA Roboter GmbH Zugspitzstraße 140 D-86165 Augsburg Niemcy Niniejsza dokumentacja
Laboratorium Instalacja systemu Windows XP
 5.0 5.2.1.7 Laboratorium Instalacja systemu Windows XP Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym ćwiczeniu zainstalujesz system Windows XP Professional. Zalecany sprzęt Do tego ćwiczenia
5.0 5.2.1.7 Laboratorium Instalacja systemu Windows XP Wprowadzenie Wydrukuj i uzupełnij to laboratorium. W tym ćwiczeniu zainstalujesz system Windows XP Professional. Zalecany sprzęt Do tego ćwiczenia
Warsztaty szkoleniowe. Technologia SafetyLon w systemach związanych z bezpieczeństwem funkcjonalnym Element logiczny Moduł 7.3.
 Warsztaty szkoleniowe Technologia SafetyLon w systemach związanych z bezpieczeństwem funkcjonalnym Element logiczny Moduł 7.3 Plan prezentacji 1. 2. 3. Aplikacja referencyjna element logiczny Algorytm
Warsztaty szkoleniowe Technologia SafetyLon w systemach związanych z bezpieczeństwem funkcjonalnym Element logiczny Moduł 7.3 Plan prezentacji 1. 2. 3. Aplikacja referencyjna element logiczny Algorytm
ROZWIĄZANIA WIZYJNE PRZEMYSŁOWE. Rozwiązania WIZYJNE. Capture the Power of Machine Vision POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD
 POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje
POZYCJONOWANIE IDENTYFIKACJA WERYFIKACJA POMIAR DETEKCJA WAD PRZEMYSŁOWE ROZWIĄZANIA WIZYJNE Capture the Power of Machine Vision Sensors Cameras Frame Grabbers Processors Software Vision Solutions Informacje